Как сделать экзоскелет своими руками: Как построить тяжёлый силовой экзоскелет своими руками
Содержание
Как построить тяжёлый силовой экзоскелет своими руками
Это пневматический экзоскелет с очень прочным стальным каркасом. Для этого скелета нам понадобится сварка (совсем немного), дрель и отрезная. Обшивка была нарезана на чпу фрезе. Ну и немного стали.
Начнем мы с каркаса рук.
Весь каркас мы делаем из стального профиля. Он хорошо обрабатывается и благодаря многочисленным отверстиям очень удобен для соединения. Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6мм.
Или же сбоку. Внизу будет установлена дуга из ПЭТа.
Все элементы подгоняются под конкретную руку поэтому о каких- то точных размерах сказать сложно. В моем случае основа этого элемента делалась из цельного куска в 1 метр и перегибалась под 90 градусов через 45-10-45 см.
Второй элемент идет от локтя до плеча. Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Вот так выглядит это всё сверху.
Или сбоку. Если есть небольшие «перепилы» как у меня это не страшно. На сталь в слабых местах всегда можно наварить нужные элементы. Для этого участка понадобится примерно 1,5 метра стального профиля.
Вот так рука крепится к шаровой опоре, которая служит тут плечевым суставом. Довольно мощный и подвижный элемент. Крепится эта опора на 2 насквозь проходящие через весь каркас шпильки на 10 мм.
Сделаем 5-6 штук 20 см пневмомускул. Со стороны джойстика устанавливаем стальную пластину. Примерно на расстоянии 3 см от конца петли.
На эту пластину и на другой конец каркаса и крепим мускулы. Если отверстий будет не хватить — сверлим. Всё равно всё это будет ещё покрываться пластиком.
Сверху это выглядит вот так. Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
Также, при подборе элементов и нужного градуса изгиба, нужно учитываться что мускулы сокращаются примерно на 1/3.
Так же делается и вторая рука. Вместо двух штырей на конец можно приделать всё что угодно. Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
Следующий элемент это грудная основа с пнематикой. Это наиболее сложный и тяжелый элемент т.к. очень много элементов.
Сначала покажу как это должно выглядеть в конце.
Можно увидеть огромное количество зеленых трубок пневмопровода, мускулы, клапана, аккумуляторы.
Основу каркаса спины мы также делаем из стального профиля. Состоит он из 2 пропиленных и изогнутых элементов по 1 метру и одного «П» образного элемента 60-30-60. Всё это прошивается шпильками нужной длины. Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Сбоку это выглядит вот так. Все зажимается и соединяется болтами — никакой сварки. Так потом проще что-то снимать и подгонять, а это точно нужно будет делать не раз.
Бедра состоят из 4 элементов профиля длиной 20 см, 2 элементов из профиля длиной 10 см и 2 мощные шпильки на 12 мм, которые и соединяют все это. К спине бедра крепятся через очень мощную петлю.
Ноги также крепятся через шаровую опору. Она устанавливается через 5 см кусок профиля. Это элемент зажимается 20 см кусками профиля через шпильку. Должно быть что-то типа вот такого. Это прочно и подвижно получается.
А теперь самое сложное — пневматика.
Будем использовать стандартную полную схему. Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Есть более простой, но менее эффективный вариант.
Приводы те же, но вся пневматика будет раз в 10 меньше…и во столько же раз неэффективней.
Но мы делаем первый вариант.
Сначала соединяем распределитель, ресивер, компрессор и пневмореле в 1 модуль. Так будет значительно удобней.
Ресивер сделан из обычного огнетушителя на 3 литра. Компрессор — двухцилиндровый для накачки шин. Клапана от полуавтоматической сварки для СО. Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Питание выводим через пневмореле на какой-нибудь мощный переключатель (На 25А) и на аккумуляторы.
На передней части ставим 3 стальные пластины по 30 см. На них мы будем крепить компрессорный модуль и клапана. Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.
Крепим на пластину клапана. Учитываем что на каждую группу мышц нужно 2 клапана — для активации и для спуска.
Все выходные трубки каждого активационного клапана подключаем к распределителю. Распределитель это по сути пневматический тройник. В него идет относительно толстый шланг от ресивера, а с него выходит много тонких трубок. Можно обойтись и без него, но понадобится просто огромное количество тройников от омывателя.
Кроме локтевого привода есть ещё привод на плече. Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Второй уголок крепится уже на руку. Важно так подобрать длину мышц и расположение уголка чтобы при полностью расслабленных мышцах рука свободно висела.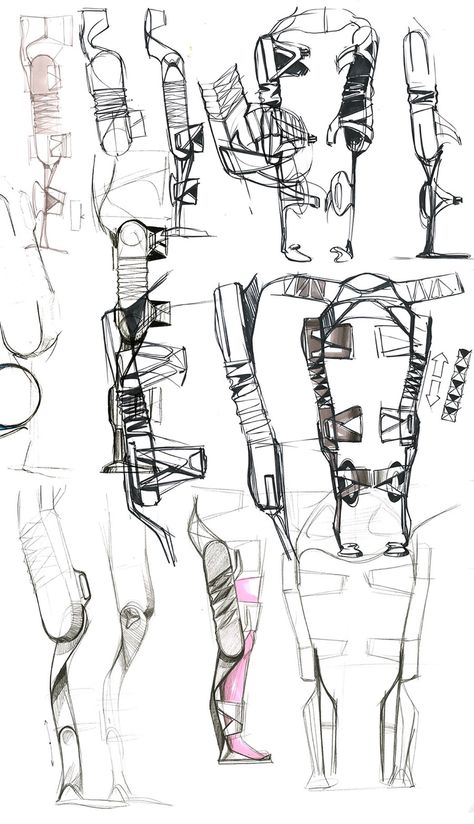 Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
Осталось сделать ноги с обшивкой и экзоскелет готов!
Самая сложная часть ноги это коленный сустав. Вот так он выглядит. Их нужно сделать 4 шт. Соединяется он с помощью сварки.
Фотография несколько смазана, но принцип увидеть можно. Это просто подшипник в зажиме и ограничитель хода. К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
Если не делать ограничение хода то появляется вероятность повреждения ноги пилота.
Каркас ноги состоит из 4 подковообразных элементов. Все их размеры также подгоняются под конкретного человека. Все 4 элемента имею разные размеры. Скрепляется всё шпильками 10-12 мм, причем выводим 2 шпильки на длину бедра. Через них нога и будет крепится к шаровой опоре бедра.
Вариантов как сделать ступни было 2. Первый состоял в использовании уже готового элемента.
Это был более простой и быстрый способ. Для такой ступни нужно было только 4 элемента: Один стальной держатель для бруса, стальная пластина под ступню и 2 уголка для крепление к ноге. Крепится все должно было с помощью обычных портфельных шлейфов и замков.
Второй вариант заключался в изготовлении из пластин более аэргономичной конструкции. На этом варианте мы и остановились.
В этой ступне все элементы это просто 4 мм сталь, изогнутая и подогнанная под ногу. Элементы провариваются.
Ноги также имеют приводы. По 2 на ногу. Они позволяют удерживать статичное состояние или же подняться. Одна группа мышц расположена в бедре и тянется от каркаса бедра к верхней подкове ног. Мышцы как бы тянет вперед ногу.
Вторая группа мышц расположена прямо в каркасе ноги. Эта группа при активации «стягивает» ногу. Шланги идут к спине, к клапанной группе.
Управление ногами осуществляется через кнопки расположенные в «лодыжке». Т.е. мы тянем ногу назад и нажимаем кнопку.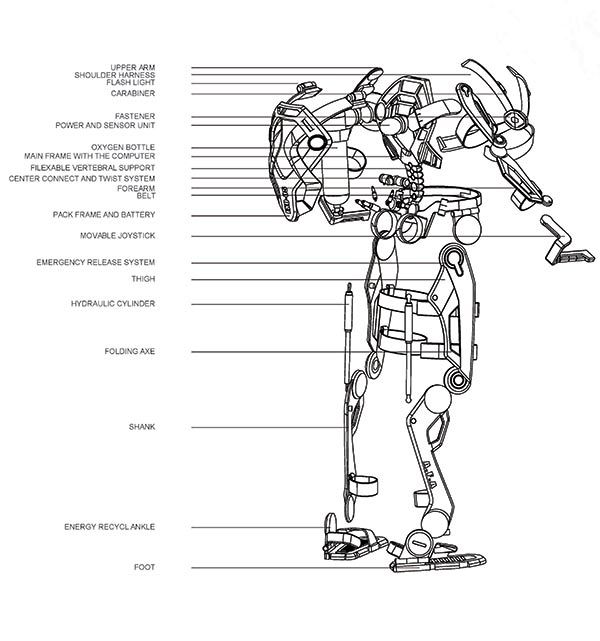
Как и в случае с рукой ведем провода к клапанам. Руки используют только 2 из 5 контактов джойстиков поэтому можно приделать какое-то оборудование. Или же перевести управление ног на руки.
Для зашиты всей пневматики от повреждений и защиты пилота от пневматики весь экзоскелет покрывался противоударным ПЭТом.
ПЭТ это что-то типа толстого спрессованного полиэтилена. Является антивандальным покрытием. Покрываем пластиком места непосредственного расположения пневматики и участки контакта с пилотом. Крепим саморезами и болтами.
В обшивку ног устанавливаем кнопки для управления. Тут их лучше видно. Верхние кнопки управляют бедренными приводами. Провода и трубки лучше поместить в какую нибудь гофру или же другой шланг — их так много что велика вероятность случайно задеть.
Для того чтобы экзоскелет можно было легко одевать и снимать в качестве держателей пилота используем портфельные лямки.
Скелет готов! Само собой это не 146% точное руководство по сборке т.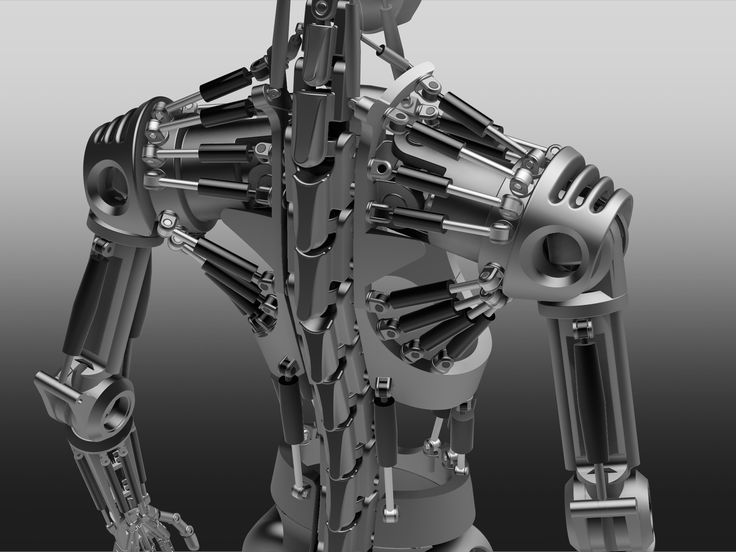 к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
Собирали мы вот это
Источник
Если у вас есть производство или сервис, о котором вы хотите рассказать нашим читателям, пишите Аслану ([email protected]) и мы сделаем самый лучший репортаж, который увидят не только читатели сообщества, но и сайта Как это сделано
Еще раз напомню, что посты теперь можно читать на канале в Телеграме
и как обычно в инстаграме. Жмите на ссылки, подписывайтесь и комментируйте, если вопросы по делу, я всегда отвечаю.
Жми на кнопку, чтобы подписаться на «Как это сделано»!
Tags: мастерская
Как сделать экзоскелет своими руками в домашних условиях
Экзоскелет – это слово, слышали, пожалуй, многие, если не все. И, вероятно, видели его на картинках или в видеороликах. И этот внешний скелет (по-гречески «экзо» значит внешний) действительно впечатляет. Потому что с ним люди даже с ограниченными физическими возможностями могут ходить, многое делать.
Потому что с ним люди даже с ограниченными физическими возможностями могут ходить, многое делать.
Но как это бывало и с другими устройствами, агрегат оказался нужным не только для тех, кому он предназначался. В частности, им заинтересовались и специалисты строительных специальностей.
Содержание
- Чем экзоскелет интересен для строителей и почему они не бросились его покупать
- Особенности самодельного экзоскелета для строителей
- Как правильно использовать самодельный экзоскелет
Чем экзоскелет интересен для строителей и почему они не бросились его покупать
Википедия определяет экзоскелет как устройство, восполняющее утраченные функции человека. Исходя из такого определения, у вас, вероятно, возникнет вопрос: зачем же он нужен строителям. Ведь среди них, в принципе, едва ли встречаются инвалиды. И это действительно так. Инвалидов среди них, пожалуй, не отыщешь.
Экзоскелет интересен строителям своей возможностью помогать выполнять тяжелые операции.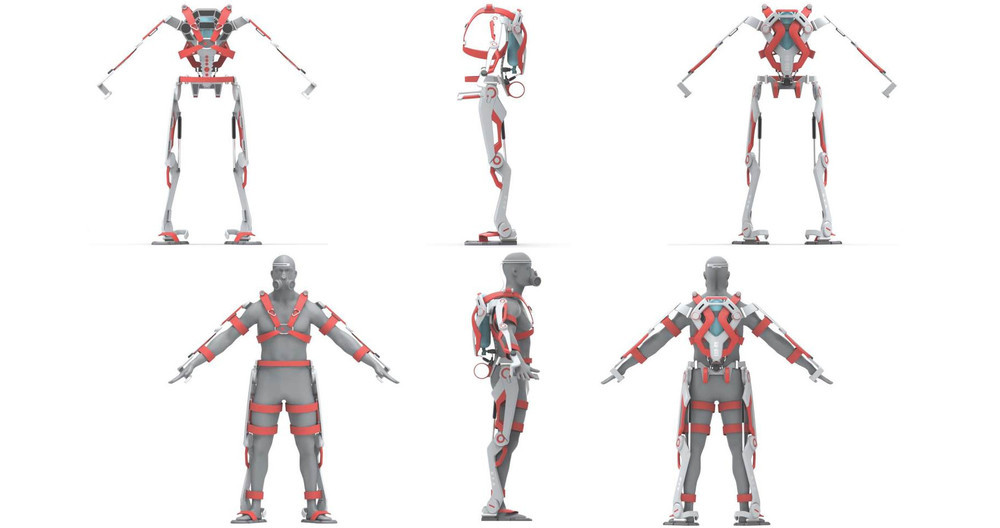
Но это устройство полезно не только для тяжелых работ. В частности, оно просто незаменимо для тех, кому при выполнении работы подолгу приходится держать руки в поднятом положении. Например, при выполнении электромонтажных работ, укладке плитки на стены и т.п. То есть он интересен людям многих строительных специальностей: отделочникам, электрикам, плиточникам и т.д.
Интерес, пожалуй, понятен и очевиден. Однако здесь имеется огромное «НО». Это цена. Если вы попытаетесь навести справки, то узнаете, что стоимость экзоскелета измеряется тысячами долларов. Поэтому-то умельцы и задумались, как сделать реплику этого устройства своими руками. Причем адаптировав его к потребностям строителя. То есть человека вполне здорового.
Читайте также: Что такое роборуки и зачем они нужны
Особенности самодельного экзоскелета для строителей
В результате изучения классического экзоскелета, народные умельцы пришли к выводу, что строительная версия этого устройства должна быть:
- легкой;
- не стесняющей движения;
- только поддерживающей, но не дополняющей усилия пользователя;
- обязательно недорогой.
Таким образом, чтобы удовлетворять этим требованиям, основу самодельного устройства должны составлять легкие тонкостенные трубки.
В его поддерживающих артикуляциях лучше устанавливать газлифты только небольшой мощности. Но достаточной, чтобы поддерживать руки в поднятом состоянии.
Чтобы специалисту было удобно работать с экзоскелетом, на теле он должен крепить с помощью удобных ремней. Причем их расположение должно быть четко выверенным.
В результате одному из умельцев удалось изготовить первую модель самодельного экзоскелета. Ее вы может увидеть на следующем фото:
Как правильно использовать самодельный экзоскелет
В принципе, понятно, что устройство действительно упрощает работу специалиста. Особенно, если ему приходится работать с постоянно поднятыми руками. Однако создатель самодельной разработки советует не увлекаться ею. Чтобы не лишать тело необходимой физической нагрузки. Хотя бы треть всей работы следует выполнять, не применяя экзоскелет. В принципе, с такой рекомендацией, по-моему, стоит согласиться.
В принципе, с такой рекомендацией, по-моему, стоит согласиться.
Готовую самоделку вы можете увидеть в следующем видеоролике. Более того, вы найдете здесь и более подробную информацию на этот счет.
Если вы хотите найти подробную информацию о тонкостях изготовления самодельного устройства, то сделать это довольно просто. Для этого достаточно только в поисковик ввести поисковый запрос «самодельный экзоскелет». И вы получите огромное количество ссылок на эту тему. И целую кучу полезных сведений.
Нажмите, пожалуйста, на одну из кнопок, чтобы узнать понравилась статья или нет.
Как сделать экзоскелет руки за 100 долларов
Какой самый дешевый экзоскелет, который вы можете построить? Мы видели самодельные экзоскелеты, которые могут поднимать тяжелые веса, вплоть до подъема задней части автомобиля. Но эти носимые проекты хороши тем, что привлекают много просмотров, и не более того.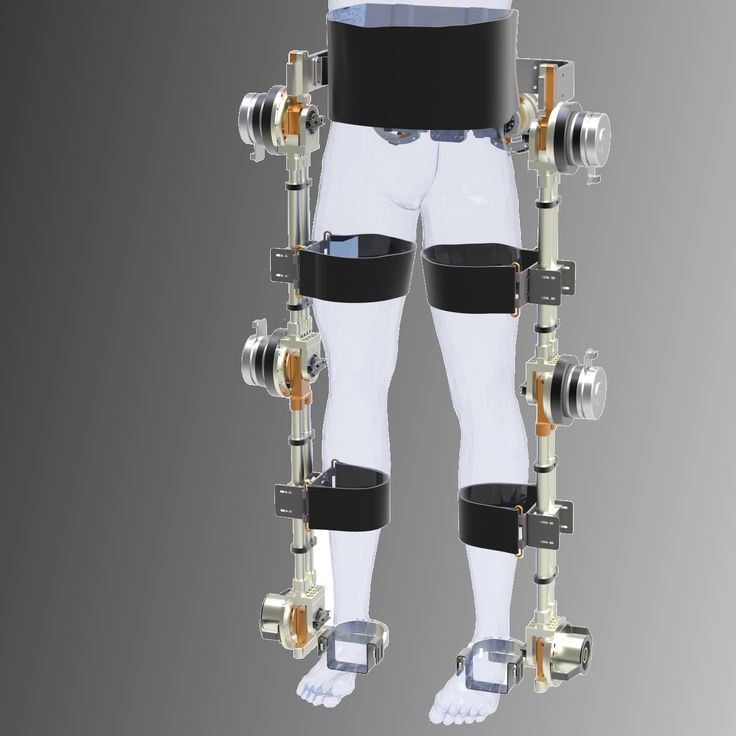 Если поговорить с их строителями, то они более чем готовы признать, что экзоскелеты для поднятия тяжестей громоздки и мало толку.
Если поговорить с их строителями, то они более чем готовы признать, что экзоскелеты для поднятия тяжестей громоздки и мало толку.
Кристьян Берс, также известный как Tex Workshop, заинтересован не в том, сколько он может поднять, а в том, насколько дешево он может поднять? Мастерская Tex создала прототип руки-экзоскелета для помощи при подъеме всего за 100 долларов. Будет интересно посмотреть, решат ли другие ютуберы и мастера по ремонту последовать их примеру? Конкуренция за то, кто сможет произвести лучший экзоскелет за свои деньги, может привести к некоторым практическим открытиям и, возможно, даже к первым компьютерам HP или Apple в индустрии экзоскелетов.
Проект заявлен на приз Hackaday.io. Hackaday Prize 2017 состоит из шести раундов и имеет общий призовой фонд в размере 250 000 долларов. Существует специальная категория, посвященная вспомогательным технологиям. Конкурс продлится с 24 июля по 4 сентября. Проект должен продемонстрировать способность улучшать качество жизни людей с ограниченными возможностями, улучшая обучение, работу или повседневную жизнь. «Превратите « инвалидность » в « эту способность ».
Существует специальная категория, посвященная вспомогательным технологиям. Конкурс продлится с 24 июля по 4 сентября. Проект должен продемонстрировать способность улучшать качество жизни людей с ограниченными возможностями, улучшая обучение, работу или повседневную жизнь. «Превратите « инвалидность » в « эту способность ».
Компоненты:
| КОЛИЧЕСТВО | ИМЯ КОМПОНЕНТА | |
| 1 | × | Датчик давления силы (резистор) |
| 1 | × | Алюминий 4 x 30 x не менее 2000 мм |
| 1 | × | Ардуино Уно/Нано |
| 1 | × | Мотор-драйвер ВНх3СП30 |
| 1 | × | Двигатель стеклоочистителя автомобиля |
| 1 | × | Длинные провода |
| 1 | × | Потенциометр |
| 1 | × | Литий-полимерный аккумулятор 3S 5500 мАч |
| 1 | × | Папина ручная газонокосилка, которую вы надеваете вокруг себя и подвешиваете газонокосилку на |
| 1 | × | Винты и гайки. М4 и М6 М4 и М6 |
| 1 | × | Клейкая лента |
| 1 | × | Застежки-молнии |
| 1 | × | Веревка или старый собачий поводок |
| 1 | × | Деревянные тарелки |
| 1 | × | 2 тактильные кнопки |
| 1 | × | Термоусадочная трубка |
Источники:
Запись на Hackaday 2017: Вспомогательная экзоскелетная рука (ExoArm)
Дешевая экзоскелетная рука (ExoArm), которая поможет пожилым людям, инвалидам и рабочим выполнять повседневные задачи с меньшим утомлением.
https://hackaday.io/project/20663-assistive-exoskeleton-arm-exoarm
YouTube:
Как сделать: экзоскелетную руку за 100 долларов
Желаем Tex Workshop удачи на Hackaday.io конкурс!
МеткиСнижение стоимости экзоскелетов
Управление экзоскелетом руки силой мысли
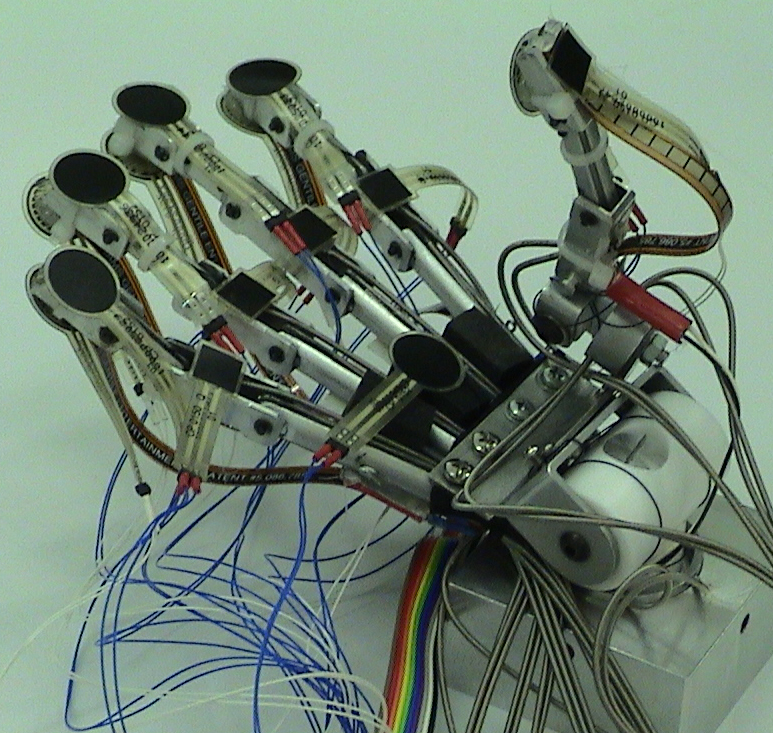
Исследователи разработали экзоскелет руки, которым можно управлять исключительно с помощью мыслей и движений глаз, согласно отчету, опубликованному вчера в первом выпуске журнала Science Robotics . Шесть человек с параличом нижних конечностей тестировали устройство в повседневных ситуациях; Исследователи сообщили, что они успешно брали кофейные чашки, ели пончики, выжимали губки и подписывали документы.
Шесть человек с параличом нижних конечностей тестировали устройство в повседневных ситуациях; Исследователи сообщили, что они успешно брали кофейные чашки, ели пончики, выжимали губки и подписывали документы.
Тот факт, что система функционирует за пределами лаборатории, в загруженной, неконтролируемой среде, является значительным улучшением по сравнению с предыдущими роботизированными конечностями, управляемыми мозгом, говорит Сурджо Сукадар, нейробиолог и врач в Университетской больнице Тюбингена в Тюбингене, Германия. Соекадар руководил исследованием.
Система работает, переводя электрическую активность мозга в действия роботизированной руки. Пользователь в сетчатой шапочке с пятью электродами думает о том, чтобы схватить объект. Это создает модель активности мозга, обнаруженную с помощью электроэнцефалографии или ЭЭГ. Алгоритм на планшетном компьютере идентифицирует эти конкретные модели активности мозга и переводит их в управляющие сигналы. Затем блок управления и набор приводов дают команду экзоскелету руки выполнять набор скоординированных движений, которые в сумме составляют движение захвата.
Весь процесс — от намерения до захвата — занимает чуть больше секунды, — говорит Сокадар. Вероятно, этого недостаточно для того, чтобы поймать мяч, но для того, чтобы взять чашку или повернуть ручку, этого вполне достаточно. Сам экзоскелет руки был разработан Николой Витиелло и Марией Кьярой Карроцца в Институте биоробототехники Высшей школы Святой Анны в Пизе, Италия.
Итак, почему предыдущие демонстрации интерфейсов мозг-машина (ИМТ) заставляли участников застревать в лаборатории, а эта позволяла им использовать экзоскелет руки в реальных условиях, таких как рестораны? Отвлекающие факторы и неожиданные события в общественных местах мешали человеку сосредоточиться на мыслях, необходимых для активации такой системы.
Команда Соекадара преодолела это, добавив определенные произвольные движения глаз к технике управления системой. Эти движения были измерены с помощью электроокулографии или ЭОГ, которая представляет собой измерение электрического потенциала между электродами, расположенными рядом с глазом.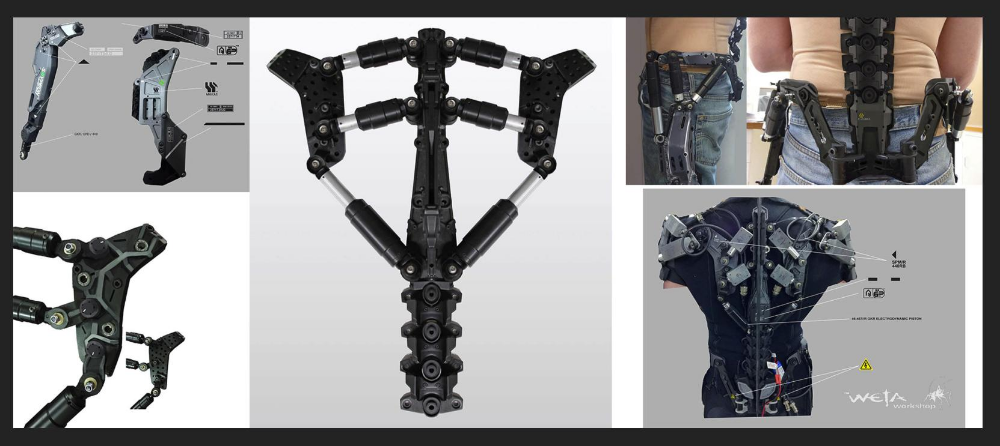 Участники могли наложить вето на захват или разблокировать захват, перемещая глаза в крайнее правое или крайнее левое положение — необычное движение, которое вряд ли сработает алгоритмам.
Участники могли наложить вето на захват или разблокировать захват, перемещая глаза в крайнее правое или крайнее левое положение — необычное движение, которое вряд ли сработает алгоритмам.
Устройство было протестировано шестью людьми с травмами спинного мозга в области шейных позвонков C5 и C6 — обычное место травмы. Все могли двигать плечами и локтями, у некоторых была ограниченная подвижность запястий, но никто из них не контролировал свои пальцы.
Система не позволяет людям маневрировать отдельными пальцами, говорит Сокадар. Это требует более точной записи активности мозга, которая в настоящее время возможна только с использованием имплантируемых устройств ИМТ — инвазивной процедуры с рядом недостатков.
Соекадар говорит, что можно использовать экзоскелеты рук, чтобы полностью восстановить функции рук. Он указывает на широко разрекламированный эксперимент, в котором участники с параличом нижних конечностей, которые тренировались ходить с помощью ИМТ и роботизированного экзоскелета для нижней части тела, восстановили произвольные движения ног и ощущение боли после 12 месяцев тренировок.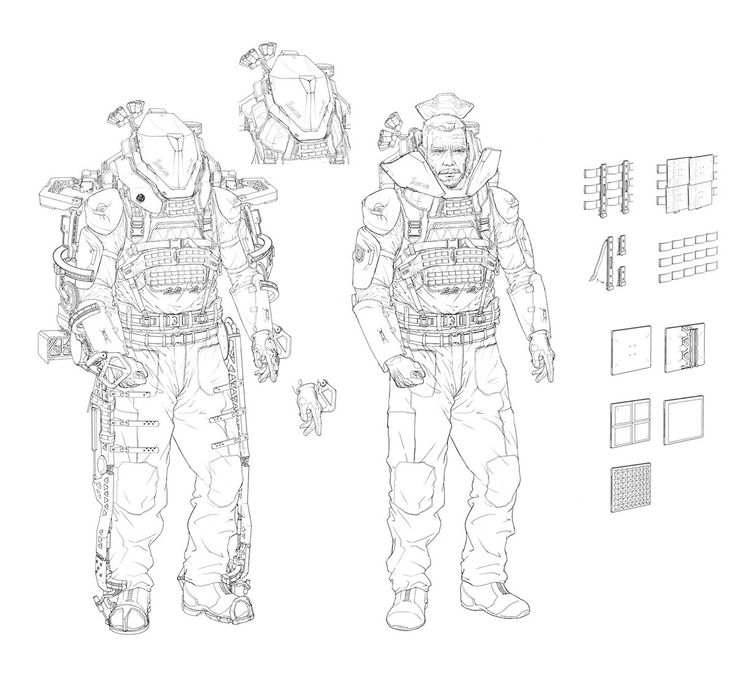
Всего комментариев: 0