Управление роботом манипулятором: Автоматизированная система управления роботом-манипулятором PM-01 на базе программируемого логического контроллера CX9001 фирмы BECKHOFF
Содержание
Системы управления промышленным роботом-манипулятором
В настоящее время все больше сфер человеческой деятельности подвергается автоматизации, в частности промышленность. На смену человеку на многих производствах приходят промышленные роботы-манипуляторы, которые призваны заменить человека при выполнении как основных, так и вспомогательных технологических операций в процессе промышленного производства. Эта замена решает важную социальную задачу – освобождения человека от работ, связанных с тяжелым трудом или от работ, которые могут причинить вред его здоровью, а также от простых монотонных операций, для которых высокая квалификация работника не требуется. Гибкое автоматизированное производство на базе промышленных роботов, позволяет решать задачи автоматизации на предприятиях с широким разнообразием продукции при штучном или мелкосерийном производстве.
Промышленные роботы-манипуляторы являются очень важной частью современного промышленного производства. Управление современными роботами манипуляторами осуществляется по средствам числового программного управления (ЧПУ). С ростом уровня автоматизации промышленного производства и вследствие чего ростом чиста промышленных роботов выросла и потребность в программных продуктах, осуществляющих управление этим роботами [1].
С ростом уровня автоматизации промышленного производства и вследствие чего ростом чиста промышленных роботов выросла и потребность в программных продуктах, осуществляющих управление этим роботами [1].
В ряде отраслей применение таких роботов на ряде технологических операций является наиболее производительным решением, а зачастую и единственно возможным. Поэтому развитие систем управления имеет очень важное значение.
Система управления как правило представляет из себя последовательность позиций, через которые проходит манипулятор в процессе работы. Эти позиции характеризуются положением TCP (Tool Center Point) – крайней точки закрепленного на манипуляторе инструмента. По умолчанию TCP находится в центре фланца робота, но ее положение можно настраивать и обычно положение TCP совпадает с острием инструмента, установленного на манипуляторе. Поэтому при программировании, как правило, задается положение TCP в пространстве.
Рисунок 1. Внешний вид робота-манипулятора
Все манипуляторы, движение которых осуществляется немеханическими приводами оснащены системами управления. Системы управления современных манипуляторов состоят из нескольких подсистем, каждая из которых выполняет свои функции: информационные, управляющие, защитно-предупредительные.
Системы управления современных манипуляторов состоят из нескольких подсистем, каждая из которых выполняет свои функции: информационные, управляющие, защитно-предупредительные.
Существует три основных вида управления: цикловое, позиционное, контурное. При цикловом управлении программой задается последовательность выполняемых движений, а также условия их начала и окончания. Крайняя точка, до которой идет движение, определяется самим манипулятором, а не задается в программе. Скорость выполнения движений определяется параметрами сервоприводов и также не задается в программе. При позиционном управлении команды подаются так, что перемещение “руки” манипулятора происходит от одной точки к другой, причем положения этих точек задаются программой. Скорость выполнения движений определяется параметрами сервоприводов и не задается в программе. Иначе дела обстоят при контурном управлении, движение «руки» происходит по заданной траектории с заданной скоростью. В программе задается траектория, скорость и режимы движения. Контурное управление применяется в тех технологических процессах, где требуется высокая точность работы.
Контурное управление применяется в тех технологических процессах, где требуется высокая точность работы.
Устройство управления и другие компоненты системы при цикловом, позиционном и контурном управлениях могут базироваться на одинаковых или разных принципах и элементных базах. К особому виду управления можно отнести адаптивное управление, при котором может осуществляться автоматическое изменение управляющей программы, при поступлении информации с внешних датчиков, которые определяют конфигурацию робота и его положение в пространстве. Объектом управления является манипулятор и его устройство передвижения, если оно имеется. Все остальное оборудование предназначено для формирования и выдачи управляющих сигналов для манипулятора. Таким образом, устройство управления получает команды от программы или сигналы от датчиков и формирует управляющие сигналы на сервоприводы манипулятора.
Так же существует режим ручного управления с помощью пульта. Оператор с помощью пульта ручного управления может управлять передвижением манипулятора, осуществлять ввод программ, настройку. На пульт управления поступает информация о выполнении движений, а также о возможных нарушениях режимов работы и об ошибках [2].
На пульт управления поступает информация о выполнении движений, а также о возможных нарушениях режимов работы и об ошибках [2].
В процессе усложнения промышленного производства требуется все большая точность и гибкость выполнения операций, что привело к необходимости разработки систем управления с элементами искусственного интеллекта. Такие системы позволяют с помощью различных сенсоров анализировать внешние условия и осуществлять операции с учетом изменений в окружающем мире. Роботы с такой системой управления, в зависимости от ситуации, способны выполнять технологические операции более эффективно, с большей точностью, скоростью и по более рациональному алгоритму.
В полной мере реализовать такие системы управления стало возможным только благодаря развитию современной микропроцессорной техники [3].
Особенности управление роботом манипулятором
Управление промышленным роботом манипулятором
В настоящее время роботы манипуляторы практически на каждом производственном процессе стали не просто необходимыми, но при этом самыми развитыми звеньями.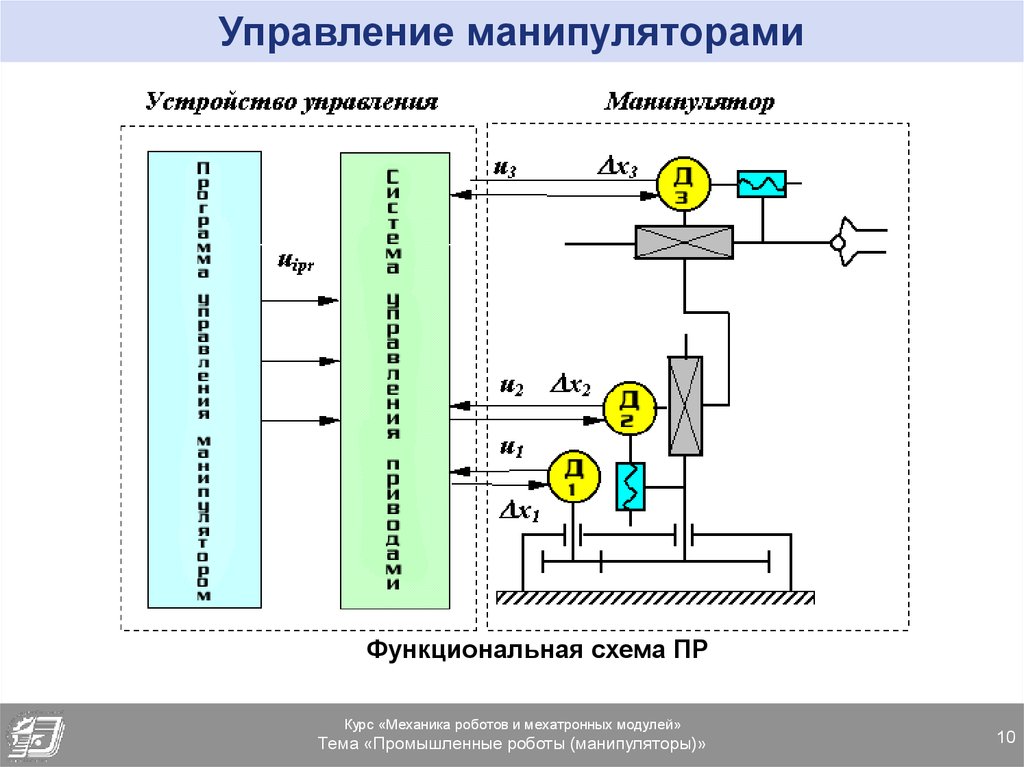 Данный фактор основан на том, что подобные приспособления постоянно проектируются и обновляются. Подобные инновации затрагивают не только механические или рабочие часы, но также и звенья управления.
Данный фактор основан на том, что подобные приспособления постоянно проектируются и обновляются. Подобные инновации затрагивают не только механические или рабочие часы, но также и звенья управления.
В современное время на большинстве производственных предприятиях осуществляется внедрение искусственного интеллекта. На данный момент все более популярным становится интуитивный метод управления. Все используемые устройства проектируются по принципу обратной связи.
Говоря иными словами, управление роботом манипулятором http://robot-manipulator.ru/ustroistvo/ производится по специальной системе, где могут быть использованы несколько методов управления — по типу обратной связи, по типу иерархической системы, а также присутствует управление подчиненного типа.
Прежде чем более подробно описать данные методы управления, стоит отметить, что в настоящее время подобные роботы используются в совершенно разных целях. Сюда можно отнести:
- покрасочные роботы http://robot-manipulator.
 ru/pokraska/ совершают одноименные работы;
ru/pokraska/ совершают одноименные работы; - разгрузочно-погрузочные процессы;
- точечная и шовная сварка;
- сборка разнообразных электронных систем;
- широкий спектр манипуляционных действий.
Как видно из всего вышесказанного, действий, которые осуществляются при помощи таких устройств, достаточно много, при этом данный диапазон постоянно расширяется.
Процесс управления по типу обратной связи характеризуется тем, что все зависит от того или требуемого результата. Говоря более подробно, все параметры программного обеспечения предварительно закладываются строго в зависимости от того или иного требуемого результата.
Выходной сигнал находится в прямой зависимости от того, какой результат требуется достичь, в предстоящем виде деятельности. Подобный метод управления оказывает прямое влияние на рабочую динамику программируемой системы.
Процесс управление по типу иерархической системы представляет собой уникальный по всем параметрам метод управления роботом, который делит все поступающие команды по степени важности, они в свою очередь управляют общими процессами, осуществляемыми роботом.
Подобный метод приводит в действие его отдельных приводов, производит расчеты траектории планируемого движения. Кроме того, воздействие осуществляется посредством контроля над работой двигателей, какого бы типа они ни были.
Процесс управления подчиненного типа может быть нескольких видов. Каждый из них отличается типом системы привода, но если точнее, то необходимостью ее создания. Например, система подчиненного управления по углу поворота устройства или его звена будет прямо зависеть от обратного типа связи именно по положению. Внутри данной системы работает управление, которое зависит от скорости, она же в обратном порядке будет оказывать влияние на процесс управления силой тока и так далее.
В заключении стоит отметить, что современная система по управлению роботами отличается сложностью и большим количеством уровней, а осуществляется все как раз посредством системы управления. Именно она дает возможность согласовать манипуляции робота с готовностью того или иного элемента, углом его захвата, а также скоростью перемещения к станкам.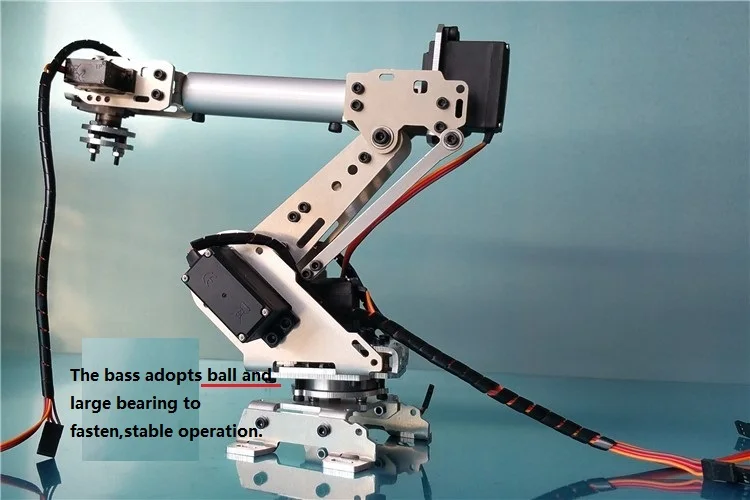
Управление роботом-манипулятором в режиме реального времени с использованием одновременно зарегистрированных нейронов в моторной коре
Георгопулос, А. П., Кеттнер, Р. Э. и Шварц, А. Б. Популяция нейронов, кодирующая направление движения. Наука 233 , 1416–1419 (1986).
Артикул
КАС
Google ученый
Эриксон, Р. Кодирование стимулов в топографических и нетопографических афферентных модальностях: о значении активности отдельных сенсорных нейронов. Псих. 75 , 447–465 (1968).
Артикул
КАС
Google ученый
Николелис, М. А., Газанфар, А. А., Фаггин, Б. М., Вотав С. и Оливейра Л. М. Реконструкция инграммы: одновременная, многосайтовая, множество записей отдельных нейронов. Нейрон 18 , 529–537 (1997).
Артикул
КАС
Google ученый
Николелис, М. А., Лин, К.-С., Вудворд, Д. Дж. и Чапин, Дж. К. Распределенная обработка соматической информации сетями таламических клеток вызывает зависящие от времени сдвиги их рецептивных полей. Проц. Натл. акад. науч. США 90 , 2212–2216 (1993).
А., Лин, К.-С., Вудворд, Д. Дж. и Чапин, Дж. К. Распределенная обработка соматической информации сетями таламических клеток вызывает зависящие от времени сдвиги их рецептивных полей. Проц. Натл. акад. науч. США 90 , 2212–2216 (1993).
Артикул
КАС
Google ученый
Николелис, М. А., Баккала, Л. А., Лин, К.-С. и Чапин, Дж. К. Синхронная активность ансамбля нейронов на нескольких уровнях соматосенсорной системы крысы предвосхищает начало и частоту тактильных исследовательских движений. Наука 268 , 1353–1358 (1995).
Артикул
КАС
Google ученый
Николелис, М. А., Лин, К.-С. и Чапин, Дж. К. Удаление неонатальных усов снижает различение тактильных стимулов таламическими ансамблями у взрослых крыс. J. Нейрофизиол. 78 , 1691–1706 (1997).
Артикул
КАС
Google ученый
Дедвайлер, С. А. и Хэмпсон, Р. Э. Значение кодов нейронных ансамблей при познании поведения. год. Преподобный Нейроски. 20 , 217–244 (1997).
А. и Хэмпсон, Р. Э. Значение кодов нейронных ансамблей при познании поведения. год. Преподобный Нейроски. 20 , 217–244 (1997).
Артикул
КАС
Google ученый
Чапин, Дж. К. и Вудворд, Д. Дж. Распределение свойств соматических сенсорных и активно-двигательных разрядов нейронов в пограничной области коры MI-SI у крыс. Экспл. Нейрол. 91 , 502–523 (1986).
Артикул
КАС
Google ученый
Чапин, Дж. К. и Вудворд, Д. Дж. Соматическая сенсорная передача в кору во время движения: I. Запуск одноклеточных ответов на прикосновение. Экспл. Нейрол. 78 , 654–669 (1982).
Артикул
КАС
Google ученый
Чапин, Дж. К. и Вудворд, Д. Дж. Соматическая сенсорная передача в кору во время движения: II. Фазовая модуляция локомоторного шагового цикла. Экспл. Нейрол. 78 , 670–684 (1982).
Фазовая модуляция локомоторного шагового цикла. Экспл. Нейрол. 78 , 670–684 (1982).
Артикул
КАС
Google ученый
Шин Х.-К. и Чапин, Дж. К. Индуцированная движением модуляция афферентной передачи к одиночным нейронам в вентропо-заднем таламусе и соматосенсорной коре у крыс. Экспл. Мозг Res. 81 , 515–522 (1990).
Артикул
КАС
Google ученый
Чапин, Дж. К. в Neural and Behavioral Approaches to Higher Brain Function (ред. Wise, SP и Evarts, EV) 201–216 (Wiley, New York, 1987).
Google ученый
Эвартс, Е. В. Связь активности пирамидных путей с силой, прилагаемой во время произвольных движений. J. Нейрофизиол. 31 , 14–27 (1968).
Артикул
КАС
Google ученый
Гез К. , Викарио Д., Мартин Дж. Х. и Юмия Х. Роль моторной коры в инициации произвольных двигательных реакций у кошек. Электроэнцефалогр. клин. Нейрофизиол. Доп. 36 , 409–414 (1982).
, Викарио Д., Мартин Дж. Х. и Юмия Х. Роль моторной коры в инициации произвольных двигательных реакций у кошек. Электроэнцефалогр. клин. Нейрофизиол. Доп. 36 , 409–414 (1982).
КАС
пабмед
Google ученый
Донохью Дж. П. Контрастные свойства нейронов в двух частях первичной моторной коры бодрствующей крысы. Мозг Res. 333 , 173–177 (1985).
Артикул
КАС
Google ученый
Chapin, J.K. in Neuronal Population Recording (изд. Николелис, Массачусетс) 193–228 (CRC Press, Boca Raton 1998).
Google ученый
Чапин, Дж. К. и Николелис, М. А. Нейронные сетевые механизмы колебательных состояний мозга: характеристика с использованием одновременных записей нескольких одиночных нейронов. Электроэнцефалогр. клин. Нейрофизиол. Доп. 45 , 113–122 (1996).
клин. Нейрофизиол. Доп. 45 , 113–122 (1996).
КАС
пабмед
Google ученый
Evarts, E. V. Активность пирамидного тракта, связанная с условным движением руки у обезьяны. J. Нейрофизиол. 29 , 1011–1027 (1966).
Артикул
КАС
Google ученый
Шмидт, Э. М., Йост, Р. Г. и Дэвис, К. К. Пересмотр силовых отношений паттернов разряда клеток коры головного мозга с условными движениями запястья. Мозг Res. 83 , 213–223 (1975).
Артикул
КАС
Google ученый
Скотт, С. Х. и Каласка, Дж. Ф. Изменения в активности моторной коры во время тянущихся движений с одинаковыми движениями рук, но с разным положением рук. J. Нейрофизиол. 73 , 2563–2567 (1995).
Артикул
КАС
Google ученый
Мур, Г. П., Перкель, Д. Х. и Сегундо, Дж. П. Статистический анализ и функциональная интерпретация данных нейронных спайков. год. Преподобный Физиол. 28 , 493–522 (1966).
П., Перкель, Д. Х. и Сегундо, Дж. П. Статистический анализ и функциональная интерпретация данных нейронных спайков. год. Преподобный Физиол. 28 , 493–522 (1966).
Артикул
КАС
Google ученый
Хамфри, Д. Р., Шмидт, Э. М. и Томпсон, В. Д. Прогнозирование показателей двигательной активности по нескольким кортикальным спайкам. Science 170 , 758–762 (1970).
Артикул
КАС
Google ученый
Дормонт, Дж. Ф., Шмид, А. и Конде, Х. Двигательная команда в вентролатеральном таламическом ядре: изменчивость нейронов может быть преодолена средним по ансамблю. Экспл. Мозг Res. 48 , 315–322 (1982).
Артикул
КАС
Google ученый
Лукашин А.В., Амирикян Б.Р., Георгопулос А.П. Моделируемый исполнительный механизм, управляемый моторными сигналами коры головного мозга. Нейроотчет 7 , 2597–2601 (1996).
Нейроотчет 7 , 2597–2601 (1996).
Артикул
КАС
Google ученый
Николелис, А. Л. и др. Одновременное представление тактильной информации разными областями коры приматов зависит от разных стратегий кодирования. Нац. Неврологи. 1 , 621–630 (1998).
Артикул
КАС
Google ученый
Уайз, С.П., Муди, С.Л., Бломстром, К.Дж. и Митц, А.Р. Изменения двигательной корковой активности во время зрительно-моторной адаптации. Экспл. Мозг Res. 121 , 285–299 (1998).
Артикул
КАС
Google ученый
Fetz, E.E. Оперативное кондиционирование активности корковых единиц. Наука 28 , 955–958 (1969).
Артикул
Google ученый
Фетц, Э. Э. и Финоккио, Д. В. Оперантное обусловливание определенных паттернов нервной и мышечной активности. Наука 174 , 431–435 (1971).
Э. и Финоккио, Д. В. Оперантное обусловливание определенных паттернов нервной и мышечной активности. Наука 174 , 431–435 (1971).
Артикул
КАС
Google ученый
Fetz, E.E. & Finocchio, D.V. Оперативное обусловливание изолированной активности в определенных мышцах и прецентральных клетках. Мозг Res. 40 , 19–23 (1972).
Артикул
КАС
Google ученый
Фетц, Э. Э. и Бейкер, М. А. Оперативно обусловленные паттерны активности прецентральных единиц и коррелированные реакции в соседних клетках и контралатеральных мышцах. J. Нейрофизиол. 36 , 179–204 (1973).
Артикул
КАС
Google ученый
Fetz, E.E. & Finocchio, DV. Корреляции между активностью клеток моторной коры и мышц рук во время оперантно-условных реакций. Экспл. Мозг Res. 23 , 217–240 (1975).
Экспл. Мозг Res. 23 , 217–240 (1975).
Артикул
КАС
Google ученый
Санес, Дж. Н., Сунер, С., Ландо, Дж. Ф. и Донохью, Дж. П. Быстрая реорганизация паттернов соматического представления моторной коры взрослых крыс после повреждения двигательного нерва. Проц. Натл. акад. науч. 85 , 2003–2007 (1988).
Артикул
КАС
Google ученый
Шмидт, Э. М. Запись отдельных нейронов из моторной коры как возможный источник сигналов для управления внешними устройствами. Энн. Биомед. англ. 8 , 339–349 (1980).
Артикул
КАС
Google ученый
Кеннеди, П. Р. и Бакай, Р. А. Восстановление нейронного выхода парализованного пациента путем прямого подключения к мозгу. Нейроотчет 9 , 1707–1711 (1998).
Артикул
КАС
Google ученый
Бхадра, Н. и Пекхэм П. Х. Стимуляция периферических нервов для восстановления двигательной функции. Дж. Клин. Нейрофизиол. 14 , 378–393 (1997).
Артикул
КАС
Google ученый
Донохью, Дж. П. и Уайз, С. П. Моторная кора крысы: цитоархитектура и картирование микростимуляции. Дж. Комп. Нейрол. 212 , 76–88 (1982).
Артикул
КАС
Google ученый
Оценка контроллеров роботов-манипуляторов
Контроллеры манипуляторов являются нервными центрами каждого робота. Контроллер представляет собой большой компьютер, который передает роботу запрограммированный код с пульта обучения, позволяя ему взаимодействовать с другими системами или запускать приложение.
Контроллеры роботов бывают двух размеров, в зависимости от компании: полноразмерный контроллер и компактный контроллер. Многие компании, такие как Fanuc, Motoman и KUKA, предлагают как полноразмерные, так и компактные контроллеры для различных роботов. Тем не менее, похоже, что тенденция больше смещается в сторону меньших, компактных контроллеров роботов-манипуляторов, которые экономят место и энергию.
Многие компании, такие как Fanuc, Motoman и KUKA, предлагают как полноразмерные, так и компактные контроллеры для различных роботов. Тем не менее, похоже, что тенденция больше смещается в сторону меньших, компактных контроллеров роботов-манипуляторов, которые экономят место и энергию.
Fanuc, лидер в области промышленных роботов, предлагает несколько различных типов контроллеров для своих роботов: RJ2, RJ3, RJ3iB, RJ3iC, R30iA и R30iB.
Более новыми моделями являются R30iA и R30iB. В то время как R30iA — полноразмерный контроллер, R30iB — компактная модель. Обе модели имеют свои преимущества, но R30iB (самая новая модель) оснащена для работы с программами iRVision 2-D и 3-D, а также оснащена iPendant Touch, который более удобен для пользователя, чем предыдущие модели.
Yaskawa Motoman Robotics также предлагает контроллеры манипуляторов роботов различных форм и размеров — ERC, MRC, XRC, NX100, DX100, DXM100 и новейшую модель FS100, представляющую собой компактное устройство.:quality(80)/images.vogel.de/vogelonline/bdb/550500/550542/original.jpg)
Контроллер робота-манипулятора FS100 компактен и мощен — настоящая инновация для Motoman. Этот небольшой контроллер, весящий всего 20 кг, по-прежнему производит впечатление. Он в 2-4 раза быстрее, чем контроллер DX100, и предназначен для работы с небольшими роботами для упаковки и перемещения деталей с грузоподъемностью менее 20 кг.
Еще одним компактным вариантом для клиентов Motoman является контроллер DXM100. Этот контроллер робота-манипулятора также имеет более высокую производительность, чем другие полноразмерные модели. Контроллер также может управлять восемью роботами или 72 осями.
Говоря о KUKA Robotics, нужно говорить о двух одинаковых контроллерах, но в то же время разных. Это контроллеры компактных роботов-манипуляторов KR C4 и KR C4. Хотя они различаются по размеру, они обеспечивают потребителю одинаковую высокую производительность и надежность. Контроллеры роботизированных манипуляторов KUKA этого поколения более мощные, гибкие и интеллектуальные, чем другие модели.
Всего комментариев: 0