Универсальный токарный: Купить универсальный токарный станок с УЦИ по выгодной цене!
Содержание
Универсальный токарный станок CS6250x1000 — цена, отзывы, характеристики с фото, инструкция, видео
Универсальный токарный станок CS6250 предназначен для обработки внешних и внутренних цилиндрических поверхностей, конических поверхностей и других поворотных поверхностей, рассверливания отверстий и смазочных канавок. Данный токарный станок имеет повышенную жесткость шпиндельного узла и рамы. Это позволяет вести обработку с большим усилием резания, полностью используя мощность привода. Каленые и шлифованные косозубые шестерни обеспечивают бесшумность работы, долговечность станка и плавность переключения. Большой выбор резьб различных видов. Максимальная точность обработки достигает IT7, шероховатость обработанной поверхности до Ra1,6.
Преимущества токарных станков серии CS
- Индукционно закаленные направляющие
- Жесткая на скручивание станина станка
- Широкий диапазон оборотов шпинделя и 24-х ступенчатая коробка
- Большой диапазон резьб и подач
- Большое усилие резания 14000Н и подачи 3500Н
- Леворучное или праворучное управление суппортом
- Высокая точность станков позволяет достигать округлости в пределах 0.
 01мм и цилиндричность в пределах 0.02мм на 200мм
01мм и цилиндричность в пределах 0.02мм на 200мм - Легкое и плавное перемещение суппорта
- Ускоренные подачи по X,Z
- Пиноль оснащена линейкой
- Задняя бабка имеет продольную подстройку для резки конусов
 01мм и цилиндричность в пределах 0.02мм на 200мм
01мм и цилиндричность в пределах 0.02мм на 200мм| Характеристика | Единица измерения | Значение |
|---|---|---|
| Мах диаметр обработки над станиной | мм | Ø500 |
| Мах диаметр обработки над суппортом | мм | Ø300 |
| Мах диаметр обработки над выемкой в станине | мм | Ø710 |
| Эффективная длина выемки | мм | 240 |
| Максимальная длина заготовки | мм | 1000 |
| Максимальная длина обточки | мм | 950 |
| Шпиндель со сквозным осевым отверстием | мм | Ø52 |
| Конус отверстия в шпинделе | — | MT6 |
| Число передач | — | 24 |
| Скорость вращения шпинделя | об/мин | 9-1600 |
| Метрическая резьба | — | 0. 5~224мм/48 5~224мм/48 |
| Дюймовая резьба | витков /дюйм | 72~1/8 t.p.i/46 |
| Питчевая резьба | — | 56~1/4 D.P/45 |
| Модульная резьба | — | 0.5~112 M.P/42 |
| Диапазон продольных подач | мм/об | 0.012-2.73/93 |
| Диапазон поперечных подач | мм/об | 0.028-6.43/93 |
| Поперечное ускоренное перемещение | м/мин | 50Hz:4.5; 60Hz:5.4 |
| Продольное ускоренное перемещение | м/мин | 50Hz:1.9; 60Hz:2.3 |
| Шаг ШВП | мм | 12 |
| Мах ход резцовой салазки | мм | 145 |
| Мах ход поперечной каретки | мм | 320 |
| Угол поворота плиты | ° | 90 |
| Сечение резца | мм | 25×25 |
| Диаметр пиноли задней бабки | мм | Ø75 |
| Конус пиноли задней бабки | — | MT5 |
| Мах ход пиноли задней бабки | мм | 150 |
| Продольное перемещение задней бабки | мм | ±15 |
| Мощность главного двигателя | кВт | 7,5 |
| Мощность привода ускоренных подач | кВт | 0. 3 3 |
| Мощность насоса СОЖ | кВт | 0.12 |
| Габаритные размеры станка | мм | 2632х975х1270 |
| Вес CS6250x1000 | кг | 2100 |
Стандартная комплектация CS6250
- 3-х кулачковый патрон
- 4-х кулачковый патрон
- Планшайба
- Неподвижный люнет
- Подвижный люнет
- Авто-стоп
- Защита от стружки
- Система подачи СОЖ
- Освещение рабочей зоны
- Ножной тормоз
- Вращающийся центр
- Задняя бабка
- Переходная втулка
- Инструкция на русском языке
Дополнительная комплектация
- Быстросменный резцедержатель американского типа
- Индикатор резьбы
- Быстросменный резцедержатель
- Защита патрона
- Защита резцедержателя
- УЦИ
- Шпиндель со сквозным осевым отверстием Ø82
- Конус отверстия в шпинделе Ø90 1:20
Комментарии и вопросы:
Комментариев пока нет, но ваш может быть первым.
Разметить комментарий или вопрос
INDEX B400 — универсальный токарный станок
Универсальный токарный станок для прецизионной и тяжелой обработки резанием
Основные характеристики станка
Ваши преимущества
- Четко структурированная и эргономичная концепция рабочей зоны
- Жесткая станина из минерального литья для достижения высокой точности обработки
- Рабочий шпиндель с ременным приводом для достижения высоких крутящих моментов
- Диаметр прутка — 82 мм, диаметр зажимного патрона — 315 мм
- Ортогональная линейная ось Y обеспечивает высокую точность обработки
- Задняя бабка ЧПУ с электронным управлением оси
- Стандартная комплектация: Система управления iXpanel — i4.0 ready с сенсорным экраном 18,5″ — Основа: Siemens S840D sl
B400 в фокусе
INDEX B400 является последовательной модернизацией испытанных временем производственных решений. При индивидуальном оснащении этот новый гибкий универсальный станок находит свое место как в изготовлении инструментов и прототипов, так и в производстве. Накопленный десятилетиями ноу-хау отражается в многочисленных конструктивных деталях, например, кожухе в металлической обшивке над главным шпинделем, обеспечивающем защиту от столкновений при использовании длинных борштанг, и многом другом.
При индивидуальном оснащении этот новый гибкий универсальный станок находит свое место как в изготовлении инструментов и прототипов, так и в производстве. Накопленный десятилетиями ноу-хау отражается в многочисленных конструктивных деталях, например, кожухе в металлической обшивке над главным шпинделем, обеспечивающем защиту от столкновений при использовании длинных борштанг, и многом другом.
Компоненты
Главный шпиндель
- Диаметр прутка — 82 мм, диаметр зажимного патрона до 315 мм
- Частота вращения 4000 об/мин
- Мощность шпинделя 24 кВт (при 40% продолжит. включения)
- Момент вращения 550 Нм (при 40% продолжит. включения)
- Тормоз для индексного деления оси
Револьверная головка с вертикальной осью на крестовом суппорте
- 12 приводных позиций
- Крепление VDI 30 согласно DIN 69880 с патентованным W-образным зубчатым зацеплением
- X 360 мм / Y ±60 мм / длина токарной обработки по Z до макс.
 750 мм
750 мм - Возможность обработки до 70 мм под центром вращения
- 6000 об/мин, 8,8 кВт, 19,5 Нм (при 25% продолжит. включения)
Задняя бабка с ЧПУ
- электронная, свободно позиционируемая
- крупноразмерные направляющие качения
- усилие прижима до 10.000 Н с электронным регулированием
- центрирующий конус MK5 или SK30
Люнет (опция)
- возможность электронного позиционирования
- возможность программирования ЧПУ
- диапазон зажима 12 — 152 мм
Устройство удаления деталей (опция)
- Ø макс. = 82 мм
- длина макс. = 175 мм
- вес макс. = 8 кг
Просторная рабочая зона обеспечивает наилучшую доступность при наладке станка INDEX B400. Главный шпиндель и инструментальный револьвер оптимально доступны и таким образом обеспечивают быструю и гибкую наладку и переоснастку. Продуманная концепция рабочей зоны с круто-наклонным и гладким настилом обеспечивает идеальный стружкоотвод и предотвращает образование ее скоплений.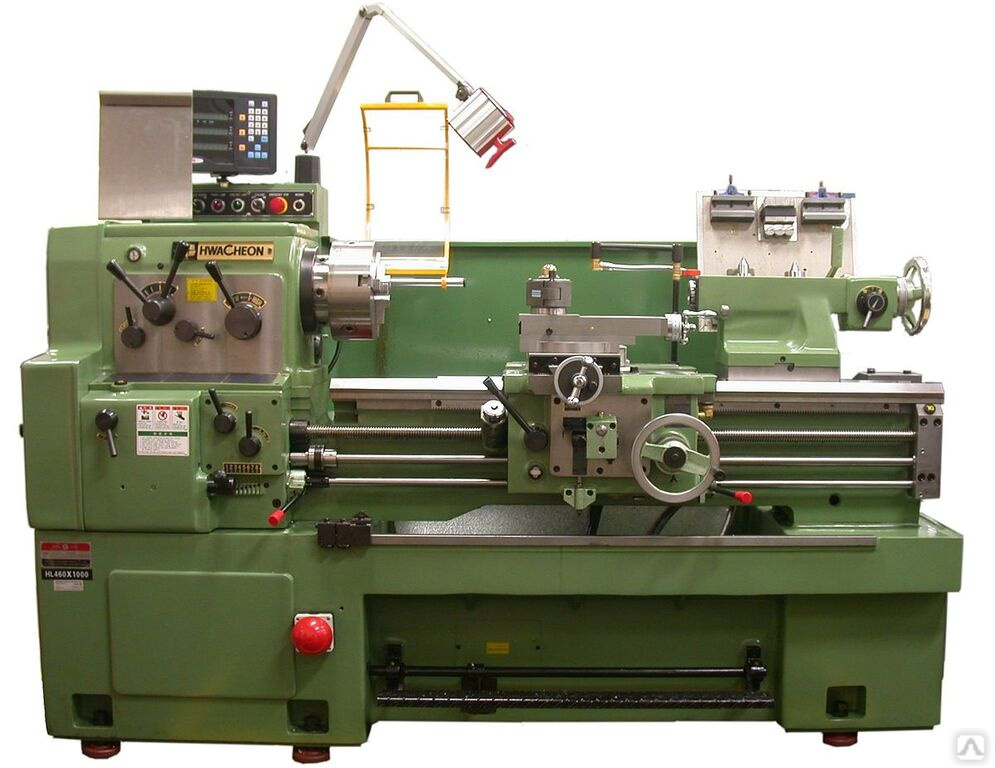
- быстрая наладка
- отличный доступ к рабочей зоне
- хороший стружкоотвод
Принцип W-образных пазов
Патентованное W-образное зубчатое зацепление фирмы INDEX для высокой стабильности повторяемости при смене инструмента.
- короткое время наладки и переоснастки
- высокая точность при смене благодаря длинным пазам для фиксации
- продление стойкости режущих пластинок
- совместимость с DIN 69880
- подходит для фиксированных инструментов и инструментов с приводом
Широкий спектр деталей
Универсальный токарный станок B400 обеспечивает возможность обработки большого многообразия деталей из прутка диаметром до 82 мм и в патроне до 315 мм.
С45
Заготовка Ø 65 x 400 мм
25CrMo4
Заготовка Ø 250 x 230 мм
20NiCrMo2-2
Тянутый пруток Ø 78 мм
Система управления
Технические данные
abrir todos
Рабочая область
Длина обточки
мм
Главный шпиндель
Наибольший диаметр прутка
мм
Диаметр патрона
мм
Макс. скорость
скорость
об/мин
об/мин
Мощность при 100% / 40%
кВт
16 / 24
Крутящий момент при 100% / 40%
Н·м
375 / 550
Противошпиндель
Наибольший диаметр прутка
мм
Диаметр патрона
мм
Макс. скорость
об/мин
об/мин
Крутящий момент при 100% / 40%
Н·м
79 / 119
Мощность при 100% / 40%
кВт
8 / 12
Задняя бабка
Усилие подачи Z
Н
10.000
Ускоренное перемещение Z
м/мин
Star turret VDI30
Количество ячеек
Макс. скорость
об/мин
об/мин
Мощность при 25%
кВт
Крутящий момент при 25%
Н·м
Перемещение суппорта X, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
360 / 40 / 11.900
Перемещение суппорта Y, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
± 60 / 20 / 11. 700
700
Перемещение суппорта Z, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
750 / 40 / 11.900
Star turret VDI40
Количество ячеек
Макс. скорость
об/мин
об/мин
Мощность при 25%
кВт
Крутящий момент при 25%
Н·м
Перемещение суппорта X, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
360 / 40 / 11.900
Перемещение суппорта Y, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
±60 / 20 / 11.700
Перемещение суппорта Z, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
750 / 40 / 11.900
Disc turret VDI40
Количество ячеек
Макс. скорость
об/мин
об/мин
Мощность при 25%
кВт
Крутящий момент при 25%
Н·м
Перемещение суппорта X, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
360 / 40 / 11. 900
900
Перемещение суппорта Y, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
±60 / 20 / 11.700
Перемещение суппорта Z, ускоренное перемещение, усилие подачи
мм / м/мин / Н
мм / м/мин / Н
750 / 40 / 11.900
Габариты, масса, мощность подключаемого питания
Длина x ширина x высота
мм
3.251 x 1.900 x 2.290
Масса
кг
Мощность подключаемого питания
кВт
Система управления
Siemens
S840D sl
Мультисенсорный экран
Запросите предложение прямо сейчас!
Вы получите предложение со стандартной конфигурацией
Материалы для скачивания
Брошюра
EnglishGermanFrench
INDEX B400
Baixar
pdf5 MB
Baixar
Baixar
pdf5 MB
Baixar
Baixar
pdf5 MB
Baixar
Эти токарные станки также могут заинтересовать Вас
INDEX-Werke GmbH & Co.
 KG
KGHahn & Tessky
Plochinger Straße 92
73730 Esslingen
Germany
Tel. +49 (0) 711 3191-0
[email protected]
www.index-werke.de
©
2023
INDEX-Werke GmbH & Co. KG Hahn & Tessky
Универсальная машина Тьюринга
Универсальная машина Тьюринга
Манолис Камвисселис — [email protected]
Машина Тьюринга — это математический инструмент, эквивалентный цифровому
компьютер. Это было предложено математиком Тьюрингом в 30-х годах,
Это было предложено математиком Тьюрингом в 30-х годах,
и с тех пор является наиболее широко используемой моделью вычислений в
вычислимость и теория сложности.
Модель состоит из отношения ввода-вывода, которое машина
вычисляет. Входные данные подаются в двоичной форме на ленте машины,
а вывод состоит из содержимого ленты, когда машина
останавливается.
Что определяет способ изменения содержимого ленты?
конечный автомат (или FSM, также называемый конечным автоматом) внутри
Машина Тьюринга. FSM определяется количеством состояний, в которых он
имеет и переходы между ними.
На каждом шаге текущее состояние и символ читаются на
лента определяет следующее состояние, в котором будет находиться FSM, символ, который
машина выведет на ленту (возможно прочитанную, оставив
содержание без изменений), и в каком направлении движется голова, влево
или вправо.
Проблема с машинами Тьюринга в том, что другая машина должна
строиться для каждого нового вычисления, которое должно быть выполнено, для каждого
отношение ввода-вывода.
Вот почему мы вводим понятие универсальной машины Тьюринга.
(UTM), который наряду с вводом на ленту принимает
описание машины M. Затем UTM может имитировать M на
остальное содержимое входной ленты. Универсальная машина Тьюринга
Таким образом, можно имитировать любую другую машину.
Я узнал о машинах Тьюринга в первом семестре второго года обучения в
Массачусетский технологический институт (осень 96), в 6.004 (Вычислительные структуры), лучший класс когда-либо
задумал. Была поздняя ночь, когда я начал свою задачу.
Написание машины Тьюринга для вычисления некоторой операции. Чтобы проверить свой результат, я
подумал, что могу написать универсальную машину Тьюринга на схеме, чтобы помочь мне сделать
мой проблемный набор. Затем я мог бы передать ему свое описание и пример ввода, и
он бы имитировал любую машину для меня. К моему удивлению, через два часа
программа работала, и я мог приступить к остальной части моего набора задач (вы можете
читайте дальше или просто скачайте код схемы).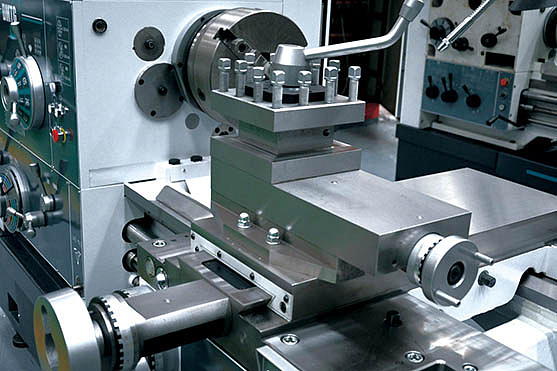
;; ;; 22.10.96 3:00-5:00: Манолис Камвисселис - [email protected] ;; ;; Программа, используемая для проверки решений набора задач 6.004. ;; Моделирование машины Тьюринга ;; глобальные переменные, используемые процедурами. ;; Они меняются на каждом этапе и должны быть повторно инициализированы перед запуском другого ;; например, запустив: (настройка начального состояния ленты с графом состояний (определить *машину* '()) ; машина в настоящее время работает (определить *состояние* 's1) ; состояние, в котором находится текущая машина (определить *позиция* 0) ; положение, в котором лента читается (определить *ленту* #()) ; лента, на которой в данный момент работает текущая машина ;; Следующая процедура берет граф состояний (см. примеры ниже) и превращает его в ;; на машину, где каждое состояние представлено только один раз, в списке, содержащем: ;; структура вида: ;; ((состояние (in out move next-state) (in out move next-state) (in out move next-state)) ;; (состояние2 (следующее состояние на выходе)) ;; (state3 (in out move next-state) (in out move next-state))) ;; ;; За каждым именем состояния следует список комбинаций входов (читается на ленте) ;; и соответствующий вывод (записанный на ленте), направление движения (влево или вправо), ;; и следующее состояние, в котором будет находиться машина.;; ;; Вот машина, возвращенная (инициализировать флип) (как определено в конце этого файла) ;; ;; ((s4 (0 0 л ч)) ;; (s3 (1 1 r s4) (0 0 l s3)) ;; (s2 (0 1 l s3) (1 0 r s2)) ;; (s1 (0 1 r s2) (1 1 л s1))) (определить (инициализировать граф состояний) (определить (расширить состояние машины на ходу) (если (нуль? состояние на вынос) машина (пусть ((текущее состояние (первые готовые состояния)) (соответствует #f)) (расширить (начать (для каждого (лямбда) (состояние) (если (равно? (состояние-имя-состояние) (автомобиль-состояние)) (начало (набор! соответствует #t) (set-cdr! состояние (против (cdr cur-состояние) (состояние cdr))))) машина) (если совпадает машина (минусы (список (имя состояния текущее состояние) (текущее состояние cdr)) машина))) (cdr готов к работе))))) (расширить '() граф состояний)) ;; Настройка — это удобная процедура для инициализации и тестирования нового графика. ;; Он позаботится о чтении графика и инициализации глобальных переменных. ;; Как только это будет сделано, все, что нужно сделать, это запустить программу (выполнить) или переместить шаг ;; пошагово (step) для отладки (определить (установить позицию состояния ленты) (установить! *машина* (инициализировать граф состояний)) (набор! *лента* лента) (установить! *состояние* состояние) (установить! *позиция* позиция)) ;; Ниже приведены процедуры, реализующие машину Тьюринга.
;; Он может писать, читать, двигаться и т.д. (определить (установить состояние! состояние) (установить! *состояние* состояние)) (определить (установить позицию! позицию) (установить! *позиция* позиция)) (определить (сделать-переместить-сделать-сделать) (состояние ((равно? сдвинуть, чтобы сделать 'R) (сдвинуть вправо)) ((равно? переместить, чтобы сделать 'L) (переместить влево)) (иначе (ошибка "я не знаю, какой ход сделать: " ход-сделать)))) (определить (переместить вправо) (установить! *позиция* (+ *позиция* 1))) (определить (переместить влево) (установить! *позиция* (- *позиция* 1))) (определить (записать вывод) (набор векторов! *лента* *позиция* вывод)) (определить (прочитать) (вектор-ссылка *лента* *позиция*)) ;; Следующие конструкторы и селекторы реализуют данные ;; структуры, используемые программой. ;; Состояние: '(s1 (0 1 r s2) (1 1 l s1)) ;; (см. выше) (определить название автомобиля) (определить спецификацию состояния cdr) ;; возвращает ==> '((0 1 r s2) (1 1 л s1)) ;; (список спецификаций) ;; спецификация: (ввод-вывод переходит в следующее состояние) ;; Он определяет для данного входа, выхода, направления движения и ;; следующее состояние.
(определить спец-вход автомобиля) (определить спецификацию-результат cdr) ;; результат: (выходное перемещение в следующее состояние) ;; Это все, что мы должны вывести из состояния и ввода, ;; чтобы иметь возможность продолжить нашу программу. (определить результат-выход автомобиля) (определить результат-движение кадра) (определить результат-состояние caddr) ;; Эта процедура просматривает нашу *машину*, чтобы найти состояние ;; чье имя ему дано, и возвращает состояние со всеми ;; его спецификаций. (определить (получить имя состояния по имени) (определить (вспомогательные состояния готовности) (если (нуль? состояние на вынос) (ошибка "Ссылка на неопределенное состояние" имя) (если (равно? (имя-состояния (состояния-в-движение)) имя) (автомобили готовы к работе) (помощник (cdr states-to-go))))) (помощник *машина*)) ;; Эта процедура вызывается с выводом предыдущей процедуры (состояние) ;; и ввод (чтение с ленты), и он возвращает действия для выполнения ;; (что писать, куда двигаться, в какое состояние переходить), в виде: ;; (текущее состояние (выходное направление движения, следующее состояние)) (определить (ввод состояния «что делать») (определить (вспомогательные спецификации для ввода) (если (нуль? спецификации на будущее) (ошибка "Обнаружен неопределенный ввод в состояние\n Вы не сказали мне, что делать в состоянии" (состояние-имя-состояние) 'с' вводом ввода) (если (равно? (спецификация (автомобиля на вынос)) ввод) (список (состояние-название состояния) (спецификация-результат (текущие характеристики автомобиля))) (помощник (cdr specs-to-go) input)))) (вспомогательный ввод (состояние спецификации состояния)) ;; пример: ;; (получить-что-делать (получить-состояние-по-имени 's1) 0) ;; ;Значение: (s1 (1 r s2)) ;; следующие селекторы имеют дело с выводом get-what-to-do ;; что делать имеет форму: (текущее состояние (выходное движение, следующее состояние)) (определить, что выводить caadr) (определить куда переместить кадастр) (определить (что делать дальше) (машина (кддадр что делать))) ;; Отправка вывода (чтобы пользователь знал, что происходит) (определить (описать-переместить состояние ввода-вывода) (новая линия) (display (list 'input: input' output: output 'move: move' state: state 'position: *position*': (читать)))) (определить (описать текущую позицию) (новая линия) (отобразить (список *лента* *состояние* *позиция* (прочитано)))) (определить (возврат текущей позиции) (список *лента* *позиция* *состояние*)) ;; и вот процедуры, которые заставляют все работать ;; Как только глобальные переменные установлены соответствующим образом (либо автоматически ;; работающий (настройка.
..) или вручную (для отладки), вызвав процедуру ;; (шаг) заставит машину Тьюринга выполнить одно действие. (определить (шаг) (пусть* ((что-делать (получить-что-делать (получить-состояние-по-имени *состояние*) (читать))) (вывод (что-выводить-что-делать)) (переместить (куда-переместить-что-делать)) (состояние (что-следующее-состояние, что-делать))) ; (описать-движение входного результата выходного состояния перемещения) (записать вывод) (делай-двигайся-двигайся) (установить состояние! состояние) (опишите текущее положение))) ;; Все, что (запуск) делает, это вызов (шаг), пока состояние не станет «остановленным» (здесь 'h) (определить (выполнить) (если (равно? *состояние* 'h) (возврат текущей позиции) (начать (шаг) (бежать)))) ;; А вот собственно тесты, относящиеся к поставленной задаче ;; flip переворачивает унарное число 01111110 на 10000001. (определить флип '( (с1 1 1 л с1) (с1 0 1 Р с2) (s2 1 0 R s2) (s2 0 1 л s3) (s3 0 0 L s3) (с3 1 1 Р с4) (s4 0 0 л Н))) (определить ленту1 (список->вектор '(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _))) ;; Мы запустим тест на ленте 1 (см.
выше), начиная с состояния s1 и с позиции 17 ленты (произвольный выбор). (установка флип-ленты 1 s1 17) (бегать) ;; Вот результат: ;; (я взял на себя смелость стереть строки, где только двигался указатель, не меняя ;; входы, выходы, состояние, но только положение на ленте (как вы можете заметить в самой правой части вывода). ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) с1 16) ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) с1 7) ;; (#(_ _ _ _ _ _ _ 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 8) ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) с2 9) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 10) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 11) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 12) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 13) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 14) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 15) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 16) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 17) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 18) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) с2 19) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) с2 20) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 21) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 22) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 23) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 24) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 25) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s2 26) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s3 25) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s3 7) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) s4 8) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) ч 7) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) ч 7) ;Значение: (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _) 7 ч) ;; это второй А задачи 1 ;; Он принимает унарное число и удваивает его: 011110 -> 0111111110.
(определить удвоитель '( (с1 1 1 л с1) (с1 0 1 Р с2) (s2 1 0 R s3) (s2 0 0 L s8) (s3 0 0 R s4) (с3 1 1 Р с3) (s4 _ 1 л s5) (с4 1 1 Р с4) (s5 0 0 L s6) (s5 1 1 л s5) (s6 0 0 R s8) (с6 1 1 л с7) (s7 0 0 R s2) (с7 1 1 л с7) (s8 0 0 R s8) (s8 1 0 R s8) (s8 _ 0 L s9) (с9 0 0 л с10) (s10 0 1 л s10) (s10 1 0 R s11) (s11 0 0 Н Н) (s11 1 1 л ч))) (определить лента2 (список->вектор '(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _))) (установка удвоителя ленты 2 's1 11) (бегать) ;; Вот результат (с теми же критериями, что и выше для стирания строк). ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _) s1 10 1) ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _) s1 7 0) ;; (#(_ _ _ _ _ _ _ 1 1 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _) s2 8 1) ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _) s3 91 ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 0 _ _ _ _ _ _ _ _ _ _ _) s4 15 _) ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 0 1 _ _ _ _ _ _ _ _ _ _) s5 14 0) ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 0 1 _ _ _ _ _ _ _ _ _ _) s2 9 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 0 1 _ _ _ _ _ _ _ _ _ _) s3 10 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 0 1 _ _ _ _ _ _ _ _ _ _) s4 16 _) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 0 1 1 _ _ _ _ _ _ _ _) s5 15 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 0 1 1 _ _ _ _ _ _ _ _) s2 10 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 0 1 1 _ _ _ _ _ _ _ _) s3 11 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 0 1 1 _ _ _ _ _ _ _ _) s4 17 _) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 0 1 1 1 _ _ _ _ _ _ _ _) s5 16 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 0 1 1 1 _ _ _ _ _ _ _ _) s2 11 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 0 1 1 1 _ _ _ _ _ _ _ _) s3 12 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 0 1 1 1 _ _ _ _ _ _ _ _) s4 18 _) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 0 1 1 1 1 _ _ _ _ _ _ _) s5 17 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 0 1 1 1 1 _ _ _ _ _ _ _) s2 12 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 0 1 1 1 1 _ _ _ _ _ _ _) s3 13 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 0 1 1 1 1 _ _ _ _ _ _ _) s4 19_) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 0 1 1 1 1 _ _ _ _ _ _) s5 18 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 0 1 1 1 1 1 _ _ _ _ _ _) s2 13 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 _ _ _ _ _ _) s3 14 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 _ _ _ _ _ _) s4 20 _) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 1 _ _ _ _ _) s5 19 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 1 _ _ _ _ _) s8 15 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 1 1 1 1 1 _ _ _ _ _) s8 16 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 1 1 1 1 _ _ _ _ _) s8 17 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 1 1 1 _ _ _ _ _) s8 18 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 1 1 _ _ _ _ _) s8 191) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 1 _ _ _ _ _) s8 20 1) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 _ _ _ _ _) s8 21 _) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 _ _ _ _) s9 20 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 _ _ _ _) s10 19 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 _ _ _ _) s10 18 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 0 1 1 0 0 _ _ _ _) s10 17 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 0 1 1 1 0 0 _ _ _ _) s10 16 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 0 1 1 1 1 0 0 _ _ _ _) s10 15 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 0 1 1 1 1 1 0 0 _ _ _ _) s10 14 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 0 1 1 1 1 1 1 0 0 _ _ _ _) s10 13 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 0 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 12 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 0 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 11 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 0 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 10 0) ;; (#(_ _ _ _ _ _ _ 1 0 0 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 90) ;; (#(_ _ _ _ _ _ _ 1 0 1 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 8 0) ;; (#(_ _ _ _ _ _ _ 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s10 7 1) ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) s11 8 1) ;; (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) ч 7 0) ;; ;Значение: (#(_ _ _ _ _ _ _ 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 _ _ _ _) 7 ч)
Разница между машиной Тьюринга и универсальной машиной Тьюринга
Улучшить статью
Сохранить статью
Нравится Статья
- Последнее обновление:
10 янв, 2023
Улучшить статью
Сохранить статью
Нравится Статья
Машина Тьюринга была впервые описана Аланом Тьюрингом в 1936 году. В первую очередь она была изобретена для исследования вычислимости данной задачи. Он принимает грамматику типа 0, которая является рекурсивно-перечислимым языком. Машина Тьюринга имеет ленту бесконечной длины, на которой мы можем выполнять операции чтения и записи. Бесконечные ячейки машины Тьюринга могут содержать входные символы и пробелы. У него есть головной указатель, который может двигаться в любом направлении, он указывает на ячейку, где считывается ввод.
В первую очередь она была изобретена для исследования вычислимости данной задачи. Он принимает грамматику типа 0, которая является рекурсивно-перечислимым языком. Машина Тьюринга имеет ленту бесконечной длины, на которой мы можем выполнять операции чтения и записи. Бесконечные ячейки машины Тьюринга могут содержать входные символы и пробелы. У него есть головной указатель, который может двигаться в любом направлении, он указывает на ячейку, где считывается ввод.
Универсальная машина Тьюринга имитирует машину Тьюринга. Универсальную машину Тьюринга можно рассматривать как подмножество всех машин Тьюринга, она может соответствовать или превосходить другие машины Тьюринга, включая себя. Универсальная машина Тьюринга похожа на единую машину Тьюринга, у которой есть решение всех вычислимых задач. Он содержит описание машины Тьюринга в качестве входных данных вместе с входной строкой, запускает машину Тьюринга на входных данных и возвращает результат.
Разница между машиной Тьюринга и универсальной машиной Тьюринга заключается в следующем:

Всего комментариев: 0