Бесколлекторные: Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Содержание
Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Аналоги мировых брендов. Подробнее>>
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.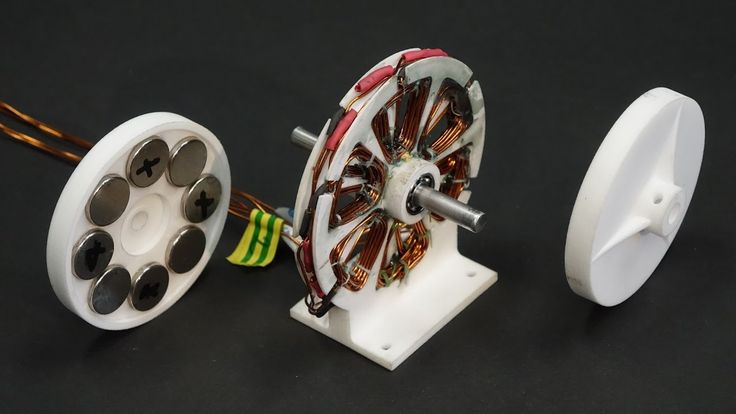
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Поделиться:
Нельзя добавить товар к сравнению. Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
Ваш город
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказВаша корзина пуста
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Перезвонить мне
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Напишите нам
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Мы ответим вам как только сможем.
Сайт использует cookies для вашего удобства. Политика конфидинциальности и Правила использования. Принять
Политика конфиденциальности
Бесколлекторные двигатели | Stepmotor
Характеристики бесколлекторных моторов
Бесколлекторные двигатели обладают улучшенными показателями мощности на килограмм веса (собственного) и широким диапазоном скорости вращения; впечатляет и КПД этой силовой установки. Немаловажно, что от установки практически не излучаются радиопомехи. Это позволяет разместить рядом с ней чувствительное к помехам оборудование без опасений за корректность работы всей системы.
Расположить и использовать бесколлекторный двигатель можно в том числе и в воде, это не повлияет на него отрицательным образом. Также его конструкция предусматривает расположение и в агрессивных средах. Однако в этом случае следует заранее продумать месторасположение блока управления. Помните, что только при бережной аккуратной эксплуатации силовой установки она будет работать на вашем производстве эффективно и бесперебойно на протяжении долгих лет.
Длительный и кратковременный режим работы – основные для БД. Например для эскалатора или конвейера подходит длительный режим работы, в котором электродвигатель работает статично в течение долгого количества часов. Для длительного режима работы предусмотрена повышенная внешняя теплоотдача: тепловыделения в окружающую среду должны превышать внутренние тепловыделения силовой установки.
В кратковременном режиме работы двигатель за время своей работы не должен успеть нагреться до максимального значения температуры, т.е. должен быть выключен до наступления этого момента. Во время перерывов между включениями и работой двигателя он должен успеть остыть. Именно так работают бесколлекторные двигатели в подъемных лифтовых механизмах, электробритвах, сушилках фенах и другом современном электрооборудовании.
Сопротивление обмотки двигателя связано с коэффициентом полезного действия силовой установки. Максимального КПД можно достигнуть при наименьшем сопротивлении обмотки.
Максимальное рабочее напряжение – это предельное значение напряжения, которое можно подавать на обмотку статора силовой установки. Максимальное рабочее напряжение напрямую связано с максимальными оборотами двигателя и и максимальным значением тока обмотки. Максимальное значение тока обмотки лимитировано возможностью перегрева обмотки. Именно по этой причине необязательным, но рекомендуемым условием эксплуатации электродвигателей является отрицательная температура окружающей среды. Она позволяет значительно компенсировать перегрев силовой установки и увеличить длительность ее работы.
Максимальное рабочее напряжение напрямую связано с максимальными оборотами двигателя и и максимальным значением тока обмотки. Максимальное значение тока обмотки лимитировано возможностью перегрева обмотки. Именно по этой причине необязательным, но рекомендуемым условием эксплуатации электродвигателей является отрицательная температура окружающей среды. Она позволяет значительно компенсировать перегрев силовой установки и увеличить длительность ее работы.
Максимальная мощность двигателя – это предельная мощность, которой может достигнуть система за несколько секунд. Стоит учитывать, что длительная работа электродвигателя на максимальной мощности неизбежно приведет к перегреву системы и сбою в его работе.
Номинальная мощность – это та мощность которую может развивать силовая установка в течение периодичного заявленного производителем разрешенного периода работы (одно включение).
Угол опережения фазы предусмотрен в электродвигателе из-за необходимости компенсации на задержку переключения фаз.
Преимущества бесколлекторных двигателей
Все БД имеют высокий срок службы механических элементов. Достигнуть этого позволила ось, зафиксированная на шарикоподшипниках, исключившая из конструкции какие-либо трущийся друг об друга элементы.
Размагничивание магнитов в бесколлекторных двигателях происходит крайне медленно и составляет не более 1% в 10 лет. Таким образом вывести силовую остановку из строя можно только при перепаде напряжения в контроллере. Избежать данного развития событий позволяет защита по току в контроллере.
1. Долгий срок службы
Высокий срок службы силовой установки данного типа обусловлен неизменным режимом работы на высокой скорости. Кроме того отсутствие какого-либо трения деталей, а следовательно и отсутствие стачивания и нарушения механизмов работы положительно влияют на работу силовой установки бесколлекторного типа.
2. Высокая надежность
Срок работы бесколлекторный двигателей различного типа составляет от 20,000 часов. Чем точнее будет первичная настройка и аккуратнее его использование, тем дольше двигатель будет использоваться. Единственными элементами, ограничивающим ресурс бесколлекторного электродвигателя, являются подшипники.
Чем точнее будет первичная настройка и аккуратнее его использование, тем дольше двигатель будет использоваться. Единственными элементами, ограничивающим ресурс бесколлекторного электродвигателя, являются подшипники.
3. Повышенное быстродействие, динамичность
4. Высокая точность позиционирования
5. Низкие перегревы при перегрузках
6. Пониженный уровень электромагнитных шумов
7. Высокая перегрузочная способность по моменту
8. Возможность изменения частоты вращения в широком диапазоне
9. Линейные загрузочные характеристики
Недостатки: управление бесколлекторным двигателем
Управление бесколлекторным двигателем обуществляет специальный электронный блок управления, который также называют регулятором. Он позволяет осуществлять управление оборотами двигателя, подавать напряжение и настроить вращение силовой установки.
Как правило, именно регулятор бесколлекторного двигателя «забирает» на себя основную стоимость силовой установки. Однако без электронного блока управления настроить и запустить двигатель, так же как и запрограммировать управление бесколлекторным двигателем невозможно. Именно электронное оборудование подает постоянное напряжение на определенные обмотки статора. Также значительно как электронный регулятор на стоимость БД влияют и неодимовые магниты, использующиеся в конструкции установки.
Именно электронное оборудование подает постоянное напряжение на определенные обмотки статора. Также значительно как электронный регулятор на стоимость БД влияют и неодимовые магниты, использующиеся в конструкции установки.
Бесколлекторные двигатели имеют достаточно сложную конструкцию, поэтому любой БД, в том числе трехфазовый (наиболее часто использующийся в производстве), имеет сложный процесс управления.
Устройство БД
В зависимости от месторасположения магнитов в силовой установке существует два типа электродвигателей: «Инраннер» – с магнитами, расположенными во внутренней части, и «Аутраннер» – с магнитами во внешней части, которые вращаются во внешней плоскости статора и обмотки.
В зависимости от требующихся характеристик в электродвигателе применяется одна или другая схема бесколлекторного двигателя. Если у двигателя малое количество полюсов и высокие обороты, то используют схему работы «Инраннер». В этом типе схемы электродвигатель одновременно выполняет функцию корпуса: поэтому непосредственно на него могут быть зафиксированы крепежные элементы.
В съеме бесколлекторного двигателя «Аутраннер» предполагаются невысокие обороты и высокий момент. Вращение в конструкции осуществляет внешняя часть. Закрепить данный тип электродвигателя можно при помощи деталей статора или за незадействованную во вращении осевую часть.
Фазы бесколлекторных двигателей
Фаза бесколлекторного двигателя обеспечивает плавность вращения магнитного поля, чем больше фаз – она же является обмоткой электродвигателя – тем более плавно осуществляется вращение. Как правило, используются трехфазовые бесколлекторные двигатели, однако существуют и одно- и двух- и четырехфазовые силовые установки. Чем больше обмотки – тем выше сложность, но и лучше показатель эффективности.
Распространенность трехфазовых электродвигателей обусловлена соотношением их эффективности к значению сложности. Обычные трехфазовые бесколлекторные двигатели имеют три провода, если же это электродвигатель с датчиками положения, то для них используется еще один комплект состоящий из пяти проводов.
Напряжение подается на две обмотки из трех, тем самым создается шесть путей подачи напряжения на обмотки. Шаг поворота составляет 60 градусов.
Бесколлекторные двигатели с датчиками положения
Если в конструкции используются нагрузки на валу установки, то следует использовать двигатель с датчиком положения. Все электродвигатели в области подъемных механизмов, а также в электротранспорте должны быть оснащены датчиками положения.
Стоит помнить, что если в конструкции при старте должны быть полностью исключены колебания оси двигателя (вращения), то обойтись без датчиков положения в силовой установке не удастся. Наиболее распространенными датчиками движения в электродвигателе являются датчики, работа которых основана на эффекте Холла. Расположение датчиков должно способствовать воздействию магнитов ротора, угол между датчиками составляет 120 градусов (электро).
Датчики положения могут быть расположены как внутри так и снаружи силовой установки. Это позволяет в некоторых случаях самостоятельно дооснастить бесколлекторные электродвигатели без встроенных датчиков положения дополнительно этими внешними датчиками.
В некоторых случаях требуется чтобы датчики работали в режиме реверса, т.е. вращались в обратном направлении, для этого следует использовать дополнительный комплект датчиков перемещения. Чтобы они заработали в режиме реверса следует настроить их на обратный ход.
Применение бесколлекторных электродвигателей
Основным преимуществом БД является отсутствие нагрева и шума во время работы и это при высокой производительности. В первую очередь бесколлекторные двигателя используются в медицинском оборудовании. Большинство современного стоматологического оборудования работает именно с помощью бесколлекторный электродвигателей, поскольку в этой области возможно использовать только тихие высокопроизводительные электромоторы без нагрева.
Наружная реклама: рекламные щиты, витрины, банеры-жалюзи с изменяющимися изображениями используют в своей конструкции бесколлекторные двигатели. В этом случае БД применяются для автоматической работы банеров и вращения конструкций.
Электронное автомобильное оборудование также не обходится без бесколлекторных двигателей. Электростеклоподъемники, «дворники» или электростеклоочистители, омыватели фар и электрорегуляторы кресел также работают при помощи БД.
Отдельно отметим нефтегазовую промышленность, в которой силовые элементы в запорном оборудовании не могут обойтись без БД, поскольку только они гарантированно не имеют искрообразующие части, использовать которые категорически запрещено в данном типе производства.
Купить бесколлектроные двигатели
Мы делаем производство простым в управлении и надежным! Бесколлекторные двигатели подходят как для автоматизации крупных производств, так и любителей электроуправляемых моделей, собрать которые можно в домашних условиях.
Наш Торговый Дом занимается розничными и оптовыми продажами мотор редукторов, шаговых двигателей, линейных двигателей, цилиндрических мотор редукторов, а также бесколлекторных двигателей. Мы осуществляем полный цикл продажи от первичной консультации по требующемуся оборудованию до ее внедрения и установки на вашем производстве.
Мы всегда готовы предоставить вам бесплатную подробную консультацию по новинкам, появившимся на рынках мира, и подобрать для вас подходящий вариант силовой установки или другого оборудования. Мы работаем с самыми крупными поставщиками из Азии, Европы и СНГ, поэтому предлагаем для вас самые доступные цены на силовое оборудование.
Если вы хотите купить бесколлекторный двигатель для робототехники или автоматического управления, то можете оставить запрос на сайте Торгового Дома «Степмотор» или связаться с нами по бесплатному номеру телефона по России: 8 800 5555 068.
Бесколлекторные и щеточные двигатели постоянного тока: когда и почему лучше выбрать один из них | Артикул
Pete Millett
ЗАГРУЗИТЬ PDF
Получайте ценные ресурсы прямо на свой почтовый ящик — рассылка раз в месяц
Подписаться
Мы ценим вашу конфиденциальность . Поскольку реализовать системы управления с использованием двигателей постоянного тока проще, чем с двигателями переменного тока, они часто используются, когда необходимо контролировать скорость, крутящий момент или положение.
Существует два типа широко используемых двигателей постоянного тока: коллекторные двигатели и бесщеточные двигатели (или двигатели BLDC). Как следует из их названий, щеточные двигатели постоянного тока имеют щетки, которые используются для коммутации двигателя, чтобы заставить его вращаться. Бесщеточные двигатели заменяют функцию механической коммутации электронным управлением.
Во многих случаях можно использовать коллекторный или бесщеточный двигатель постоянного тока. Они функционируют на основе тех же принципов притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, которые могут заставить вас выбрать один из них, в зависимости от требований вашего приложения.
Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока (изображение предоставлено maxon group)
В двигателях постоянного тока для создания магнитного поля используются витки проволоки. В щеточном двигателе эти катушки могут свободно вращаться, приводя в движение вал — они являются частью двигателя, которая называется «ротор». Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Неподвижная часть двигателя называется «статором». Постоянные магниты используются для создания стационарного магнитного поля. Обычно эти магниты располагаются на внутренней поверхности статора снаружи ротора.
Чтобы создать крутящий момент, который заставляет ротор вращаться, магнитное поле ротора должно непрерывно вращаться, чтобы его поле притягивало и отталкивало неподвижное поле статора. Чтобы заставить поле вращаться, используется скользящий электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, закрепленный на роторе, и неподвижных щеток, закрепленных на статоре.
По мере вращения ротора различные наборы обмоток ротора постоянно включаются и выключаются коммутатором. Это заставляет катушки ротора постоянно притягиваться и отталкиваться от неподвижных магнитов статора, что заставляет ротор вращаться.
Поскольку существует некоторое механическое трение между щетками и коллектором, а так как это электрический контакт, его, как правило, нельзя смазывать, в течение срока службы двигателя происходит механический износ щеток и коллектора. Этот износ в конечном итоге достигнет точки, когда двигатель больше не работает. Многие щеточные двигатели, особенно большие, имеют сменные щетки, обычно сделанные из углерода, которые предназначены для поддержания хорошего контакта по мере износа. Эти двигатели требуют периодического обслуживания. Даже со сменными щетками со временем коллектор также изнашивается до такой степени, что двигатель необходимо заменить.
Для привода щеточного двигателя на щетки подается постоянное напряжение, которое пропускает ток через обмотки ротора, заставляя двигатель вращаться.
В тех случаях, когда требуется вращение только в одном направлении, а скорость или крутящий момент не нужно контролировать, для коллекторного двигателя вообще не требуется приводной электроники. В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
Для облегчения управления скоростью, крутящим моментом и направлением используется «H-мост», состоящий из электронных переключателей — транзисторов, IGBT или MOSFET, — позволяющий двигателю вращаться в любом направлении. Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скоростью двигателя или крутящим моментом можно управлять с помощью широтно-импульсной модуляции одного из переключателей.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока (изображение предоставлено maxon group)
Бесщеточные двигатели постоянного тока работают по тому же принципу магнитного притяжения и отталкивания, что и щеточные двигатели, но имеют несколько иную конструкцию. Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
В бесщеточном двигателе к ротору прикреплены постоянные магниты, а к статору — обмотки. Бесщеточные двигатели могут быть сконструированы с ротором внутри, как показано выше, или с ротором снаружи обмоток (иногда его называют двигателем с опережением).
Количество обмоток, используемых в бесщеточном двигателе, называется количеством фаз. Хотя бесщеточные двигатели могут иметь разное количество фаз, трехфазные бесщеточные двигатели являются наиболее распространенными. Исключением являются небольшие охлаждающие вентиляторы, которые могут использовать только одну или две фазы.
Три обмотки бесщеточного двигателя соединены по схеме «звезда» или «треугольник». В любом случае к двигателю подключаются три провода, а технология привода и форма сигнала идентичны.
Трехфазные двигатели могут быть сконструированы с различными магнитными конфигурациями, называемыми полюсами. Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Для привода трехфазного бесщеточного двигателя каждая из трех фаз должна быть подключена либо к входному напряжению питания, либо к земле. Для этого используются три схемы привода «полумост», каждая из которых состоит из двух ключей. Переключатели могут быть биполярными транзисторами, IGBT или MOSFET, в зависимости от требуемого напряжения и тока.
Существует ряд методов привода, которые можно использовать для трехфазных бесщеточных двигателей. Самые простые называются трапециевидной, блочной или 120-градусной коммутацией. Трапециевидная коммутация чем-то похожа на метод коммутации, используемый в щеточном двигателе постоянного тока. В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).
В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).
Для повышения производительности можно использовать другие методы коммутации. Синусоидальная или 180-градусная коммутация постоянно пропускает ток через все три фазы двигателя. Электроника привода генерирует синусоидальный ток через каждую фазу, каждая из которых смещена на 120 градусов относительно другой. Этот метод привода сводит к минимуму пульсации крутящего момента, а также акустический шум и вибрацию и часто используется для высокопроизводительных или высокоэффективных приводов.
Чтобы правильно вращать поле, управляющая электроника должна знать физическое положение магнитов на роторе относительно статора. Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Используя три датчика Холла, трапециевидную коммутацию можно реализовать с помощью простой комбинационной логики, поэтому нет необходимости в сложной управляющей электронике. Другие методы коммутации, такие как синусоидальная коммутация, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Помимо обеспечения обратной связи по положению с помощью датчиков Холла, существуют различные методы, которые можно использовать для определения положения ротора без датчиков. Самый простой способ — контролировать противо-ЭДС на невозбужденной фазе, чтобы измерить магнитное поле относительно статора. Более сложный алгоритм управления, называемый Field Oriented Control или FOC, вычисляет положение на основе токов ротора и других параметров.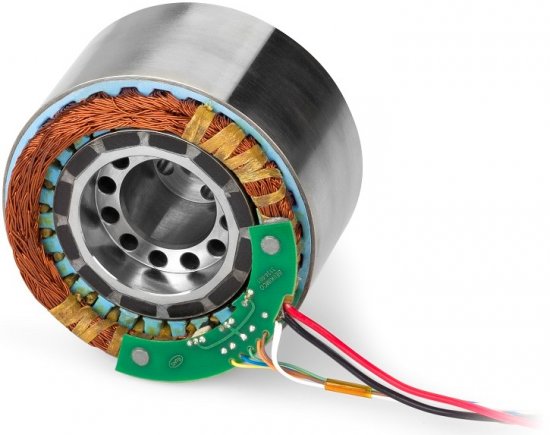 FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
Коллекторные и бесщеточные двигатели: преимущества и недостатки
В зависимости от области применения существуют причины, по которым вы можете предпочесть бесщеточный двигатель щеточному двигателю. В следующей таблице приведены основные преимущества и недостатки каждого типа двигателя:
| Коллекторный двигатель | Бесщеточный двигатель | |
| Срок службы | Короткая (изнашиваются щетки) | Длинный (без щеток) |
| Скорость и ускорение | Средний | Высокий |
| Эффективность | Средний | Высокий |
| Электрический шум | Шумный (дуговой) | Тихий |
| Акустический шум и пульсация крутящего момента | Бедный | Средний (трапециевидный) или хороший (синусоидальный) |
| Стоимость | Самый низкий | Средний (добавленная электроника) |
Срок службы
Как упоминалось ранее, одним из недостатков щеточных двигателей является механический износ щеток и коллектора.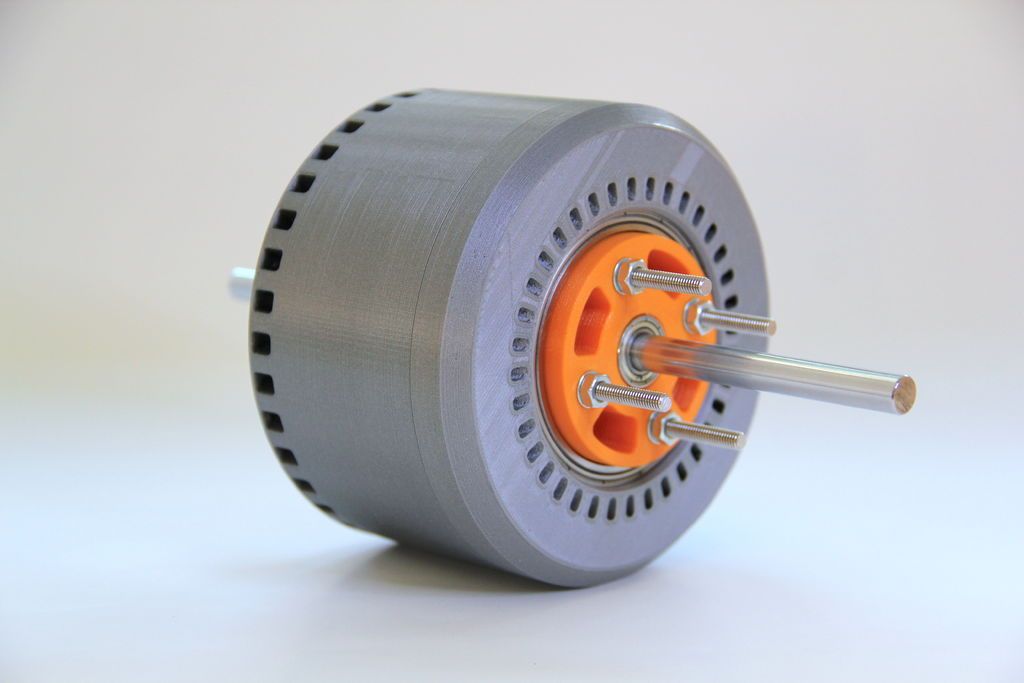 В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
Скорость и ускорение
Скорость вращения щеточных двигателей может быть ограничена щетками и коллектором, а также массой ротора. На очень высоких скоростях контакт щетки с коллектором может стать неустойчивым, и искрение щетки увеличится. В большинстве щеточных двигателей также используется сердечник из многослойного железа в роторе, что придает им большую инерцию вращения. Это ограничивает скорость разгона и торможения двигателя. Можно построить бесщеточный двигатель с очень мощными редкоземельными магнитами на роторе, что минимизирует инерцию вращения. Конечно, это увеличивает стоимость.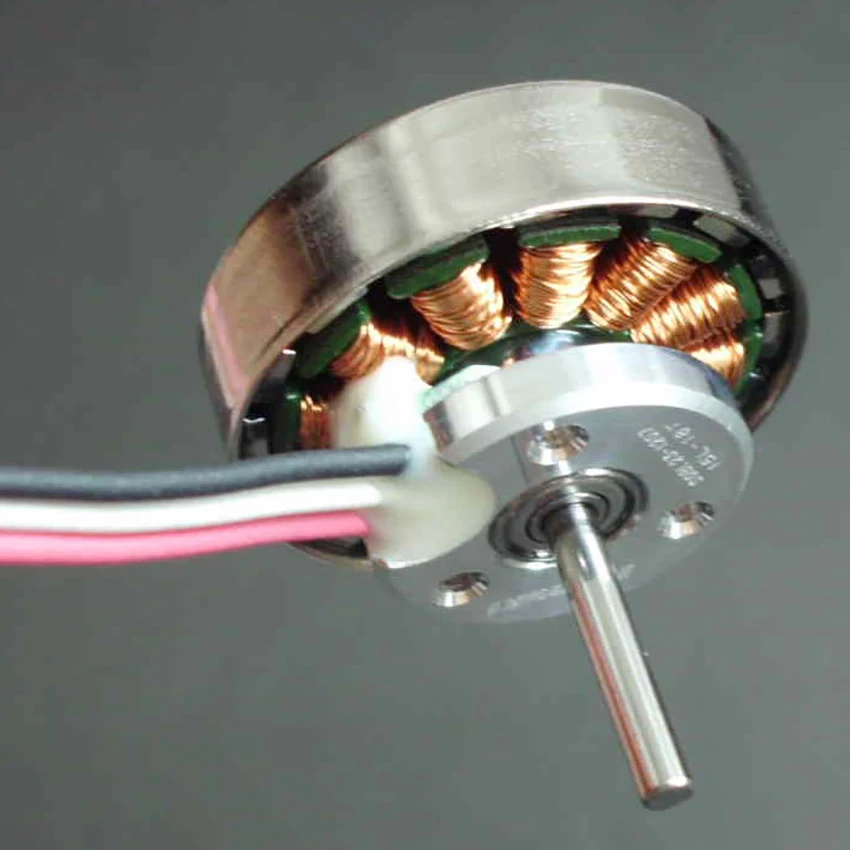
Электрические помехи
Щетки и коллектор образуют своего рода электрический переключатель. При вращении двигателя переключатели размыкаются и замыкаются, а через обмотки ротора, которые являются индуктивными, протекает значительный ток. Это приводит к искрению на контактах. Это создает большое количество электрических помех, которые могут попасть в чувствительные цепи. Возникновение дуги можно несколько смягчить, добавив конденсаторы или гасители RC между щетками, но мгновенное переключение коммутатора всегда вызывает электрический шум.
Акустический шум
Коллекторные двигатели имеют «жесткое переключение», то есть ток резко переходит с одной обмотки на другую. Создаваемый крутящий момент меняется в зависимости от вращения ротора, когда обмотки включаются и выключаются. В бесщеточном двигателе можно управлять токами обмоток таким образом, чтобы ток постепенно переходил от одной обмотки к другой. Это снижает пульсацию крутящего момента, которая представляет собой механическую пульсацию энергии на роторе. Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Стоимость
Поскольку бесщеточные двигатели требуют более сложной электроники, общая стоимость бесщеточного привода выше, чем у щеточного двигателя. Несмотря на то, что бесщеточный двигатель проще в производстве, чем щеточный двигатель, поскольку в нем отсутствуют щетки и коммутатор, технология щеточного двигателя является очень зрелой, а производственные затраты низки. Ситуация меняется по мере того, как бесщеточные двигатели становятся все более популярными, особенно в крупносерийном производстве, например, в автомобильных двигателях. Кроме того, стоимость электроники, такой как микроконтроллеры, продолжает снижаться, что делает бесколлекторные двигатели более привлекательными.
Резюме
Из-за снижения стоимости и повышения производительности бесщеточные двигатели становятся все более популярными во многих областях применения. Но есть еще места, где щеточные двигатели имеют больше смысла.
Многому можно научиться, глядя на внедрение бесколлекторных двигателей в автомобилях. По состоянию на 2020 год большинство двигателей, которые работают всякий раз, когда работает автомобиль, такие как насосы и вентиляторы, перешли с щеточных двигателей на бесщеточные для повышения их надежности. Дополнительная стоимость двигателя и электроники более чем компенсирует более низкий уровень отказов в полевых условиях и снижение требований к техническому обслуживанию.
С другой стороны, двигатели, которые используются нечасто, например, двигатели, приводящие в движение сиденья с электроприводом и электрические стеклоподъемники, остались преимущественно щеточными. Причина в том, что общее время работы в течение срока службы автомобиля очень мало, и очень маловероятно, что двигатели откажут в течение срока службы автомобиля.
По мере того, как стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные двигатели находят применение в приложениях, которые традиционно использовались щеточными двигателями. В качестве еще одного примера из автомобильного мира: двигатели регулировки сидений в картах высокого класса используют бесщеточные двигатели, поскольку они создают меньший акустический шум.
В качестве еще одного примера из автомобильного мира: двигатели регулировки сидений в картах высокого класса используют бесщеточные двигатели, поскольку они создают меньший акустический шум.
Технический форум
EV6540-U-00A Измерение тока
Привет!
Я хотел бы использовать измерение тока для реализации управления FOC моего двигателя BLDC. Чтобы реализовать это в моей текущей установке, мне нужно знать шунт…
ПРИВОДЫ ДВИГАТЕЛЕЙ/ДАТЧИКИ
MP6543: Защита от обратного ЭМП
Привет!
Когда вращение двигателя внезапно меняется на противоположное, противо-ЭДС плюс индуктивное напряжение из-за внезапного изменения обмоток двигателя могут создать напряжение, которое h…
ПРИВОДЫ ДВИГАТЕЛЕЙ/ДАТЧИКИ
MPQ6610 Имитационная модель
Привет, сообщество!
Пожалуйста, не могли бы вы поделиться со мной имитационной моделью MPQ6610?
Модель Pspice или другая
ПРИВОДЫ ДВИГАТЕЛЕЙ/ДАТЧИКИ
Получить техническую поддержку
Что подходит для вашего проекта?
- Дом
- Бесщеточный двигатель против щеточного двигателя
При сравнении щеточных двигателей с бесщеточными мы склонны склоняться к тому, что один из них лучше другого. Но правда в том, что ни один из этих вариантов технически не «лучше».
Но правда в том, что ни один из этих вариантов технически не «лучше».
Все зависит от проекта, который вы оборудуете, и от того, как вы планируете повысить эффективность своей сборки. Коллекторные и бесщеточные двигатели соответственно идеально подходят для разных проектов, поэтому так важно изучить разницу между ними и назначение каждого из них.
Сегодня мы собираемся обсудить сложные различия между щеточными и бесщеточными двигателями и помочь вам выбрать правильный двигатель для вашего текущего проекта.
Основные различия между щеточными и бесщеточными двигателями
Если бы неопытный глаз посмотрел на бесщеточный двигатель рядом с щеточным, он, вероятно, не смог бы отличить их друг от друга. Хотя оба дают одинаковый результат, они предназначены для работы по-разному.
Как работают щеточные двигатели
Как вы, наверное, догадались, щеточные двигатели получили свое название благодаря наличию щеток внутри их внутренней конструкции.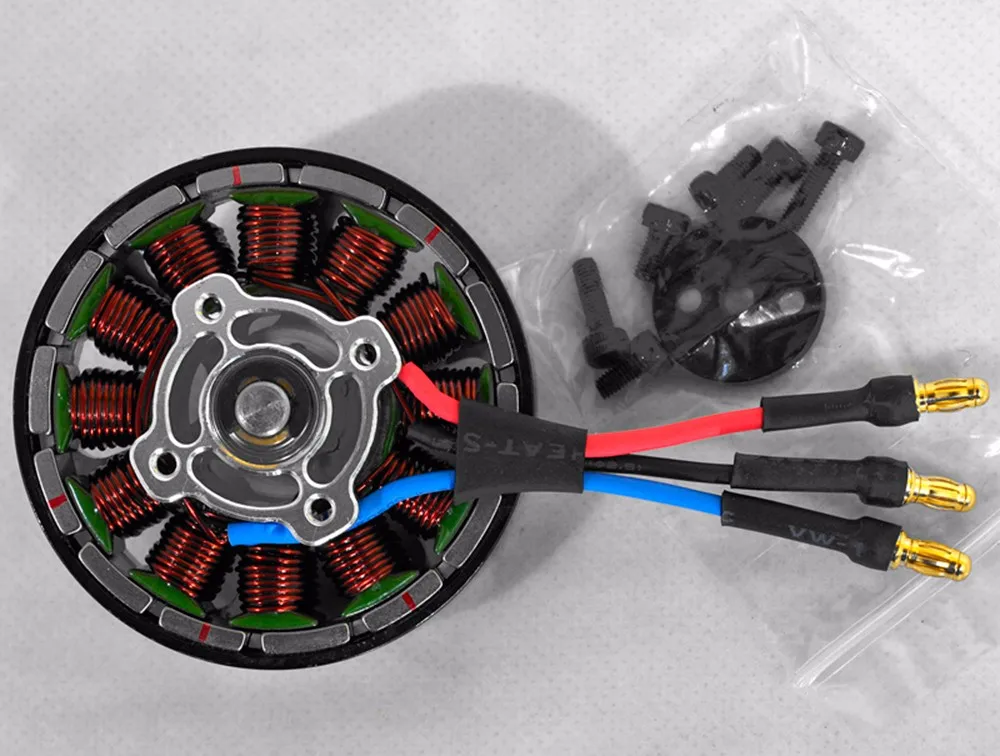 Эти щетки заряжают другое устройство внутри двигателя, называемое коммутатором.
Эти щетки заряжают другое устройство внутри двигателя, называемое коммутатором.
Коллектор заряжается электричеством от щеток. Фактически, щетки являются единственным поставщиком энергии, которая непосредственно приводит к вращению ротора.
Как работают бесщеточные двигатели
Бесщеточные двигатели не имеют вышеупомянутых щеток, поскольку они получают энергию из другого источника. Датчики на эффекте Холла определяют положение полюсов магнита внутри устройства, которое направляет ток на выделенную фазу катушки обмотки. Это поворачивает магнит на основе правила левой руки Флеминга.
Один лучше другого?
Эти различия ни хороши, ни плохи. Характер вашего проекта определит, какой из них лучше всего подходит для вас. Поскольку один дешевле, вам могут не понадобиться функции другого. Но если вы это сделаете, лучше всего выбрать тот, который соответствует вашим требованиям.
Да, коллекторные двигатели дешевле бесщеточных, но щеточные двигатели по-прежнему играют важную роль на современной технологической арене.
Вот разбивка того, когда вы должны предпочесть одно другому.
Проекты, способствующие использованию щеточных двигателей
Из-за особенностей конструкции щеточных двигателей постоянного тока некоторые аспекты могут способствовать или препятствовать их использованию. Имейте в виду следующее:
- Коллекторные двигатели более подвержены износу
- Они дешевле бесщеточных двигателей
- Им требуется немного больше энергии для работы
- Шумнее бесколлекторных двигателей
Коллекторные двигатели помогут вам сэкономить деньги на следующих проектах:
Проекты с истекшим сроком годности
Существует более высокая вероятность износа щеточных двигателей. Они требуют периодического обслуживания, замены деталей или щеток. Если вы работаете над проектом, который, скорее всего, завершится через несколько лет, лучше не тратить на двигатели постоянного тока больше, чем вам нужно.
Многие проекты машиностроения носят временный характер, поэтому коллекторные двигатели до сих пор так широко используются. И, учитывая размер некоторых из этих проектов, имеет смысл выбрать более дешевый вариант, который достаточно эффективен.
Проекты, где шум не является проблемой
Поскольку щеточные двигатели более шумные, чем бесщеточные, они чаще используются в машинах, где шум считается неразрушающим. Заводское оборудование может быть оснащено щеточными двигателями, потому что заводы более склонны экономить деньги на оборудовании, которое не обязательно должно работать тихо.
Проекты с ограниченным бюджетом
Само собой разумеется, что выбор щеточных двигателей возможен, если у вас нет большого бюджета для вашего проекта. Для крупных проектов выбор коллекторных двигателей может привести к значительному сокращению расходов всего проекта.
Как вы видели, щеточные двигатели постоянного тока могут быть лучшим вариантом. Но если вы ищете что-то более обтекаемое, взгляните на эти идеальные проекты бесколлекторных двигателей.
Но если вы ищете что-то более обтекаемое, взгляните на эти идеальные проекты бесколлекторных двигателей.
Специальное примечание : Коллекторные и бесщеточные двигатели постоянного тока компании Assun Motor не имеют сердечника и сердечника. Это делает цену между щеточным и бесщеточным почти не отличается.
Проекты, способствующие развитию бесщеточных двигателей
Основы работы бесщеточных двигателей заложены в их конструкции. Нет коммутатора для передачи тока на ротор. Вместо этого в дело вступает вышеупомянутый усилитель, который заставляет ротор двигаться более плавно.
Вот что вам нужно знать о бесщеточных двигателях:
- Они служат дольше, чем щеточные двигатели, потому что меньше изнашиваются
- Первоначальная стоимость бесколлекторных двигателей значительно выше
- Бесщеточные двигатели работают тише, поскольку для их работы требуется меньше энергии
Вот типы проектов, которые хорошо подходят для бесщеточных двигателей постоянного тока.
Долгосрочные проекты
Первоначальная планировка любого машиностроительного проекта будет дорогостоящей. Но вы никогда не захотите откладывать эти деньги дважды, не так ли? Переход на бесщеточные двигатели будет означать меньшее техническое обслуживание и меньшую вероятность возможных поломок и замен.
Если ваш проект долгосрочный, рекомендуется выбрать бесщеточные двигатели. Техническое обслуживание будет проще и реже.
Проекты, требующие бесшумности
Есть несколько случаев, когда шум мешает рабочей среде, где используется оборудование. Бесщеточные двигатели обеспечивают решение для лабораторий, мастерских и заводов, которым требуется тишина во время работы. Поскольку мощность передается без щеток, во время работы слышен меньший шум.
Медицинские исследовательские центры, лаборатории и университеты часто выбирают устройства с бесщеточными двигателями, чтобы шум был минимальным.
Тщательные проекты
Некоторые проекты требуют предельной точности и надежности.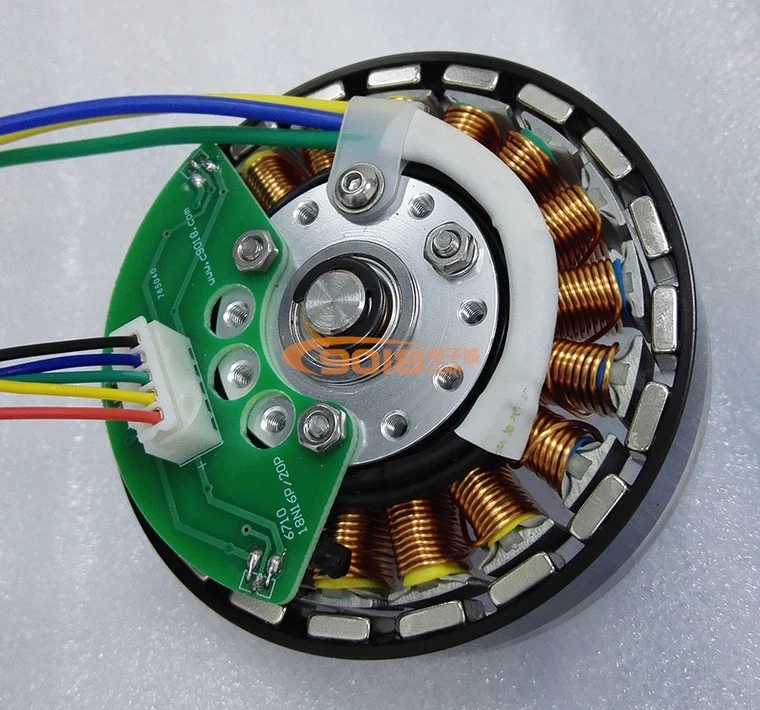 В то время как щеточные двигатели достаточно эффективны для повторяющихся проектов, с точными проектами лучше всего справляются машины, оснащенные бесщеточными двигателями. Движение плавное, что дает больший контроль над более тонкими аспектами вашего оборудования.
В то время как щеточные двигатели достаточно эффективны для повторяющихся проектов, с точными проектами лучше всего справляются машины, оснащенные бесщеточными двигателями. Движение плавное, что дает больший контроль над более тонкими аспектами вашего оборудования.
Проекты, требующие срочности
Это правда, что бесщеточные двигатели способны работать более эффективно в течение более короткого промежутка времени. Это связано с тем, что технология, лежащая в основе бесщеточных двигателей, позволяет им потреблять меньше энергии при увеличении выходной мощности. Бесщеточные двигатели просто более эффективны из-за этого аспекта, и из-за этого они могут выдерживать более быстрое движение.
Ваш процесс выбора
Выбор правильного типа двигателя для вашего проекта зависит от этих аспектов. Так что пока не списывайте со счетов коллекторные двигатели. Они могут многое предложить и по-прежнему играют важную роль в производственном мире, в котором мы живем.
Всего комментариев: 0