Бесколлекторным: Бесколлекторные моторы: описание, подключение, схема, характеристики
Содержание
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса / Хабр
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2.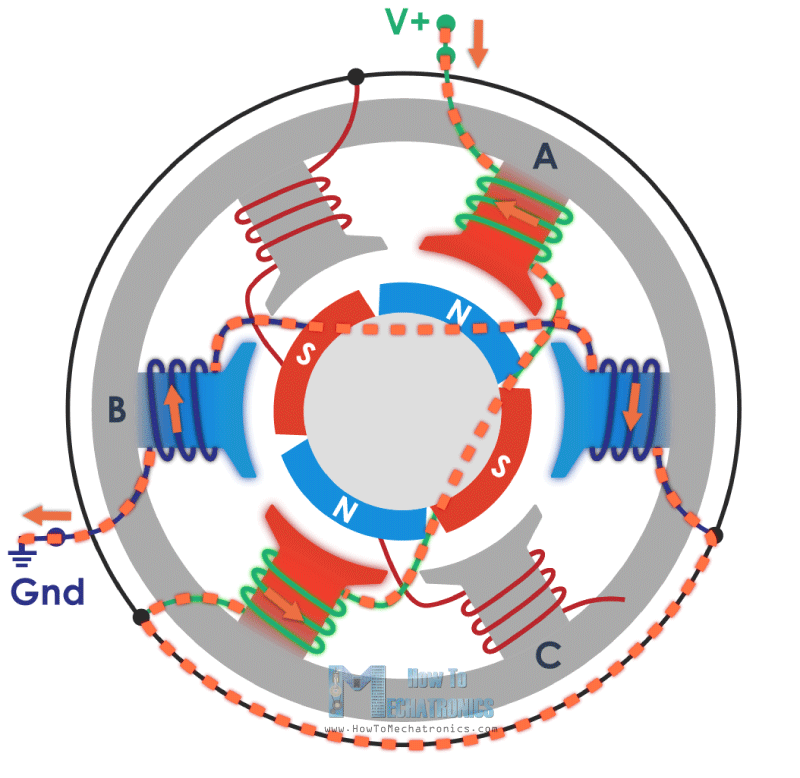 Один электрический период трехфазного двигателя.
Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.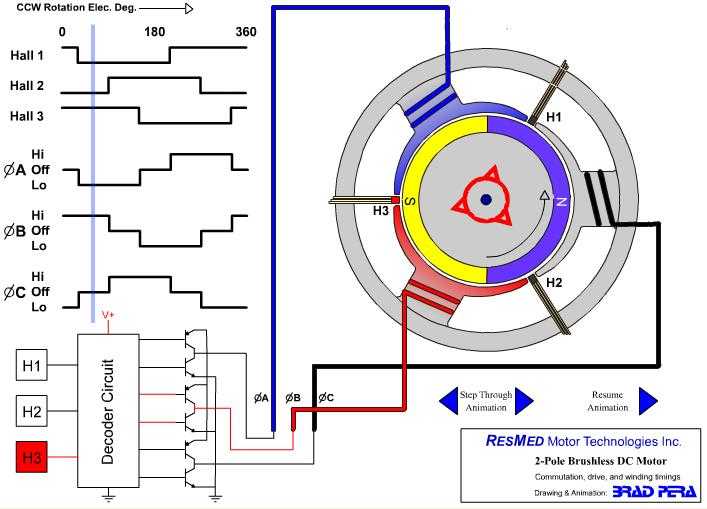
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Управление бесколлекторным двигателем постоянного тока, принцип работы
Содержание
- Преимущества бесколлекторного двигателя
- Как работает бесколлекторный двигатель постоянного тока
- Управление бесколлекторным двигателем постоянного тока
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты. В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей.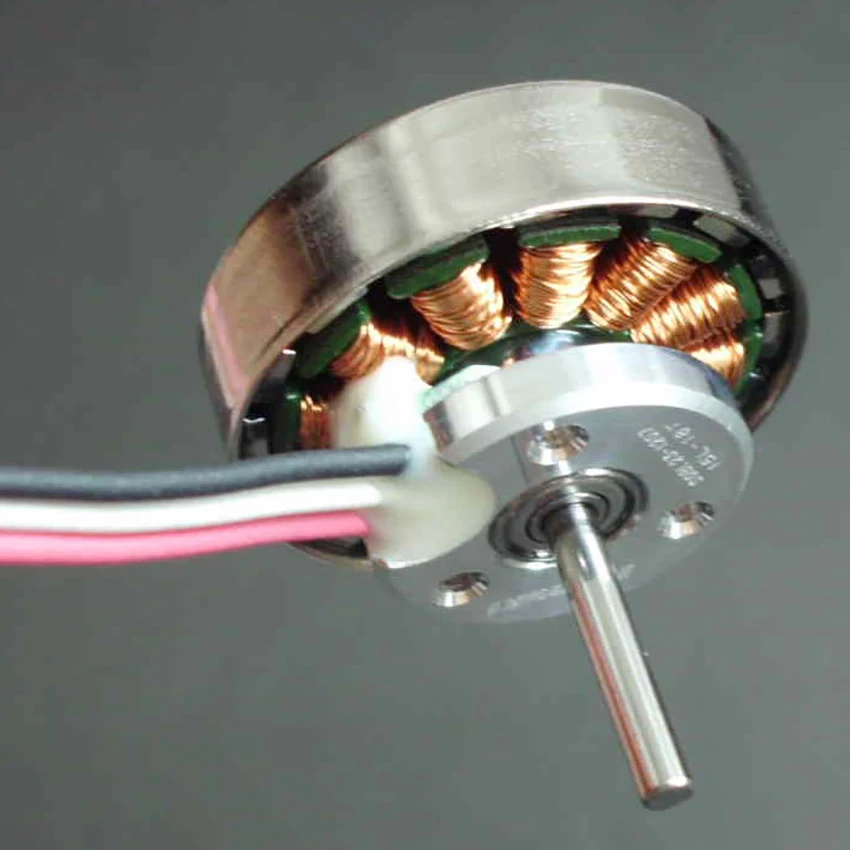 Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе).
 Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
Широкое распространение этого вида регуляторов объясняется простотой их изготовления. - С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.

- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Бесщеточный или щеточный двигатель
: что лучше для ваших электроинструментов?
istockphoto. com
com
Часто два электроинструмента одного производителя имеют очень похожие характеристики. Единственная явная разница может заключаться в том, что у одного есть щеточный двигатель, а у другого — бесщеточная версия. Последний всегда дороже, поэтому большой вопрос заключается в том, оправдывают ли бесщеточные электроинструменты такие дополнительные затраты.
Мы составили краткое объяснение, в котором основное внимание уделяется обоим типам, а также их плюсам и минусам. Нижеследующее поясняет споры о бесщеточных и щеточных двигателях, чтобы помочь вам сделать лучший выбор с точки зрения производительности и стоимости.
Бесщеточные двигатели больше подходят для аккумуляторных инструментов, чем для проводных.
На первый взгляд, тема щеточных и бесщеточных двигателей охватывает два типа. На самом деле существует четыре типа двигателей. Существуют бесщеточные двигатели переменного тока, щеточные двигатели переменного тока, бесщеточные двигатели постоянного тока и щеточные двигатели постоянного тока.
Переменный ток (AC) — это то, что выходит из розетки, поэтому все электроинструменты с питанием от сети должны быть оснащены двигателями переменного тока. Подавляющее большинство — это коллекторные двигатели, проверенная конструкция, используемая на протяжении нескольких поколений. Бесщеточные двигатели переменного тока существуют, но основные преимущества этого типа двигателя больше подходят для аккумуляторных инструментов. Когда они используются, бесщеточные двигатели переменного тока, как правило, встречаются на тяжелых профессиональных инструментах.
Постоянный ток (DC) — это то, что питают аккумуляторы, и оно используется в каждом беспроводном инструменте. Как и в случае с двигателями переменного тока, в инструментах с батарейным питанием могут использоваться как щеточные, так и бесщеточные двигатели постоянного тока (последний также известен как BLDC). Оба типа широко доступны, поэтому чаще всего возникают вопросы о бесщеточных двигателях по сравнению с щеточными.
Rel ated: Лучшие наборы электроинструментов
Как работает коллекторный двигатель?
Основные компоненты коллекторного двигателя размещены во внешней оболочке, содержащей постоянные (или статорные) магниты. Внутри этой оболочки находится ряд проволочных катушек, называемых якорем. Через середину якоря проходит приводной вал (или ротор), обеспечивающий механический привод. Коллекторный двигатель также имеет коллектор на конце якоря.
Реклама
Когда электричество проходит через якорь, якорь становится магнитным. Если полярность этого магнетизма такая же, как у постоянного магнита, то он отталкивается, заставляя якорь вращаться. Вместе с ним вращается центральный ротор, который приводит в действие патрон, пильный диск и т. д. Однако, когда якорь поворачивается наполовину, полярности будут противоположными. Поскольку противоположные полярности притягиваются, двигатель должен остановиться.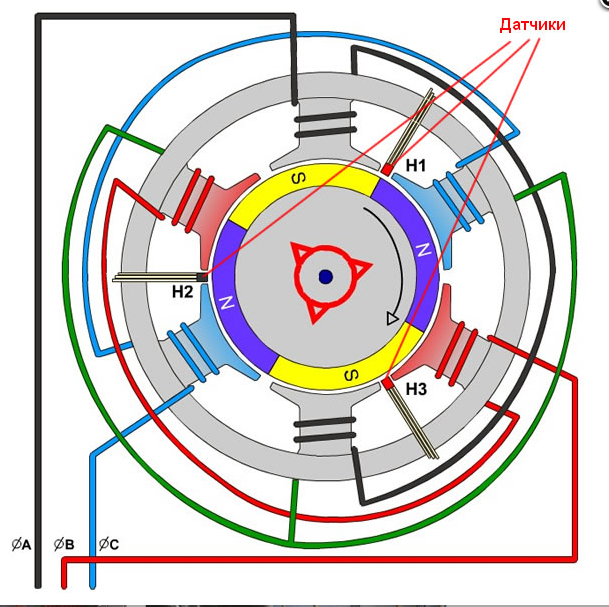
Чтобы предотвратить это и обеспечить работу двигателя, установлены щетки, которые трутся о коллектор. Одна щетка несет положительный заряд, другая отрицательный. Они обеспечивают постоянно меняющуюся полярность якоря, поэтому он продолжает отталкиваться. В результате двигатель продолжает вращаться.
istockphoto.com
Как работает бесщеточный двигатель?
Итак, что такое бесщеточный двигатель и что означает бесщеточный двигатель? Бесщеточный двигатель по-прежнему содержит статор, якорь и ротор, но не имеет физического коммутатора. Как следует из названия, он также не содержит кистей.
Эти детали заменены электронной схемой, называемой инвертором. Это создает одно постоянно вращающееся магнитное поле вокруг якоря для создания постоянного движения. Таким образом, двигатель этого типа не нуждается ни в физическом контакте щеток, ни в соответствующем коммутаторе.
Rel ated: Действуйте с осторожностью: 10 электроинструментов, которые могут вас убить
Бесщеточные двигатели более энергоэффективны.

Щетки щеточных двигателей вызывают трение, а это означает, что часть выделяемой ими энергии используется для преодоления этого трения. Трение также приводит к потере напряжения, что снижает количество энергии, приводимой в движение инструментом.
В бесщеточных двигателях отсутствует трение щеток; следовательно, они превращают гораздо больше произведенной электроэнергии в полезную энергию. Это особенно важно для инструментов с батарейным питанием, которые имеют ограниченное количество энергии, доступной на одну зарядку. Например, бесщеточная дрель может работать на 30-50% дольше, чем такая же аккумуляторная дрель, оснащенная щеточным двигателем.
Объявление
У бесколлекторных двигателей есть и другие преимущества. Отсутствие сопротивления или связанного с этим тепловыделения означает, что бесщеточные двигатели могут достигать желаемой скорости быстрее, чем их щеточные аналоги, работать быстрее и дольше и (обычно) обеспечивают больший крутящий момент при эквивалентном потреблении энергии.
Коллекторные двигатели требуют большего обслуживания, чем бесщеточные.
Трение щеток о щеточные коллекторы двигателя приводит к их износу. Очевидными признаками этого являются заикание двигателя или прерывистый пуск и остановка электроинструмента. Замена щеток технически несложна, и детали обычно доступны, но производители электроинструментов не всегда упрощают доступ к двигателю данного инструмента. Как минимум неудобно.
В конце концов, коллекторы также могут изнашиваться, а конструкция двигателя может сделать замену невозможной. Даже если это практично, цена запасных частей может удешевить просто покупку нового инструмента. Особенно это касается бюджетных моделей, в которых чаще используются коллекторные двигатели.
Бесщеточные электроинструменты, напротив, не имеют сменных частей и поэтому не требуют технического обслуживания. Они также, как правило, имеют значительно более длительный срок службы.
Rel ated: Лучшие осциллирующие инструменты
Фото: makitauk.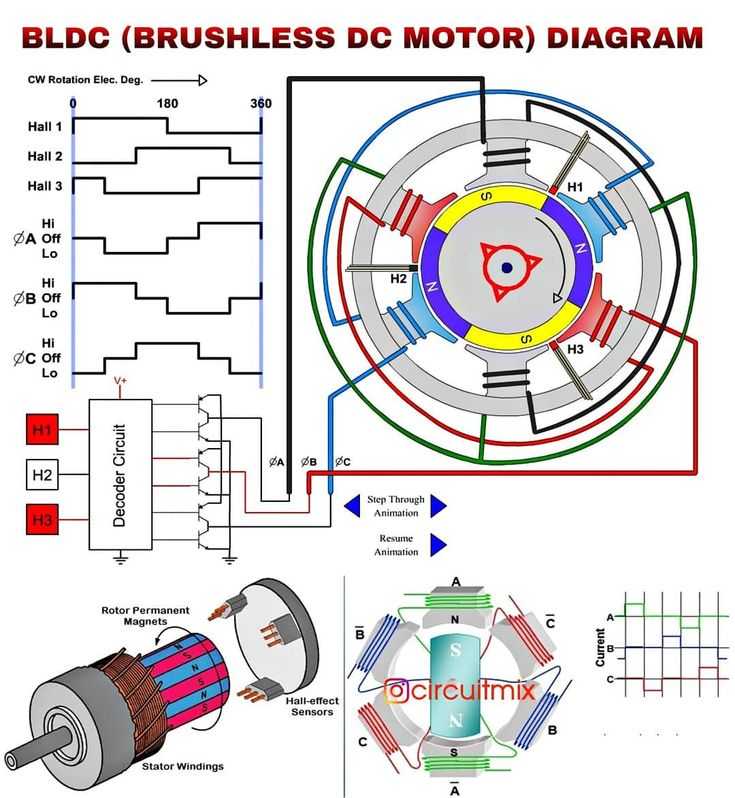 com
com
Бесщеточные двигатели более компактны и работают тише, чем щеточные двигатели.
Отсутствие коммутаторов в бесколлекторных двигателях может сэкономить много места. В частности, бесщеточные дрели можно сделать очень компактными. Это также означает, что, когда физический размер электроинструмента не имеет большого значения, можно использовать более крупный и мощный двигатель. Например, обычно энергоемкие инструменты, такие как перфораторы, могут иметь повышенную производительность при сохранении размеров, аналогичных щеточным двигателям.
Благодаря отсутствию трения и связанной с ним вибрации бесщеточные инструменты работают тише. Хотя это не особенно заметно для дрелей/шуруповертов, лобзиков и шлифовальных машин, это может иметь существенное значение для таких инструментов, как циркулярные пилы и рубанки. Снижение вибрации также помогает сделать такие инструменты, как перфораторы, более удобными в использовании в течение более длительного времени.
Реклама
Безопасность также является важным фактором.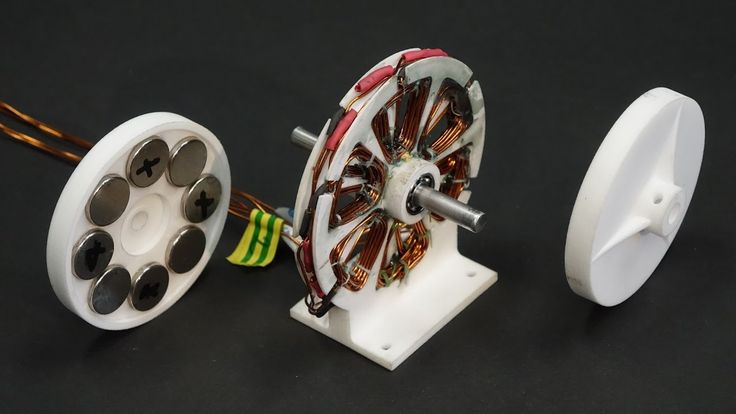 Щеточные двигатели могут вызывать искрение, особенно если щетки изнашиваются и контакт становится нестабильным. В некоторых условиях это трение может представлять опасность возгорания или взрыва. Хотя могут потребоваться другие меры предосторожности, бесщеточные двигатели не создают искр, что делает их гораздо более безопасным вариантом.
Щеточные двигатели могут вызывать искрение, особенно если щетки изнашиваются и контакт становится нестабильным. В некоторых условиях это трение может представлять опасность возгорания или взрыва. Хотя могут потребоваться другие меры предосторожности, бесщеточные двигатели не создают искр, что делает их гораздо более безопасным вариантом.
Коллекторные двигатели стоят меньше, чем бесщеточные.
На данный момент все указывает на то, что бесщеточные двигатели являются явным победителем. Однако бесщеточный двигатель не всегда может быть лучшим выбором.
Коллекторные двигатели существуют уже несколько поколений, поэтому они надежны и намного дешевле, чем бесщеточные двигатели. Когда дело доходит до выбора между бесщеточной или щеточной дрелью, последняя может предложить очень похожие характеристики и сопоставимую производительность всего за полцены. То же самое можно сказать и о других типах электроинструментов.
Для профессиональных бесщеточных инструментов способность работать дольше и минимальные требования к обслуживанию могут дать большое преимущество. Однако эти элементы обычно оказывают меньшее влияние на пользователя DIY. Может не иметь значения, если работа должна быть остановлена, чтобы зарядить аккумулятор. Если инструмент не используется очень часто, набор щеток может никогда не изнашиваться. В результате фактор обслуживания становится менее значимым. Если щеточный инструмент не используется весь день, каждый день, тот факт, что он немного шумнее, может быть не так важен.
Для тех, кому нужна высокая производительность и долговечность на стройплощадке, бесщеточный двигатель имеет явные преимущества. В долгосрочной перспективе это, вероятно, окажется лучшим вложением. Однако, если вы ищете выгодную покупку, стоит подумать о беспроводном электроинструменте с щеточным двигателем.
Реклама
Бесщеточные двигатели постоянного тока | Двигатели BLDC от NANOTEC
Бесщеточные двигатели постоянного тока, сокращенно называемые двигателями BLDC, несмотря на свое название, представляют собой трехфазные синхронные машины: ротор следует за магнитным вращательным полем, а движение синхронно с напряжением переменного тока, приложенным к обмоткам. Этот тип двигателя часто называют «бесщеточным двигателем постоянного тока», потому что во многих приложениях он заменяет двигатели постоянного тока щетками (щеточные двигатели постоянного тока или коллекторные двигатели). В щеточном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
Вместе с электронным контроллером привода, который берет на себя управление работой щеток и преобразует подаваемый постоянный ток в переменный, двигатель BLDC обеспечивает производительность, сравнимую с работой коллекторного двигателя постоянного тока — без щеток, которые имеют ограниченный срок службы. Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличить их от двигателей с механической коммутацией и щетками.
Другим часто используемым термином является синхронный двигатель с постоянными магнитами. Здесь «постоянный магнит» используется, чтобы отличить его от других синхронных двигателей, которые работают с обмоткой возбуждения на роторе, тогда как BLDC постоянно находится под напряжением. Другими словами, ротор двигателя создает магнитное поле с помощью постоянного магнита, даже если статор не находится под напряжением.
Термины PMSM и BLDC часто сопоставляют, чтобы различать двигатели PMSM с синусоидальным индуктивным напряжением (противо-ЭДС) и двигатели BLDC с трапециевидным индуктивным напряжением (см. ниже). Сегодня большинство двигателей BLDC демонстрируют синусоидальную противоЭДС.
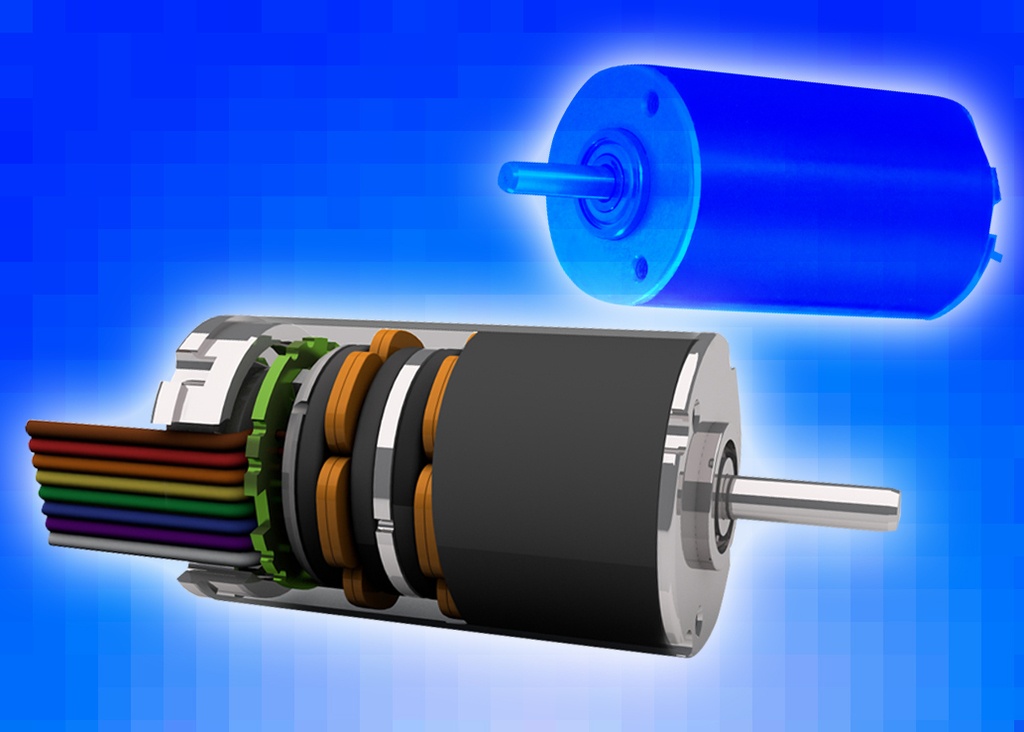
1. Структура/типы
Большинство двигателей BLDC представляют собой «двигатели с внутренним ротором», в которых ротор вращается с помощью постоянных магнитов на валу в стационарном статоре с катушками. В «двигателях с внешним ротором» статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
Преимущества двигателей с внутренним ротором заключаются в низкой инерции ротора и лучшем рассеивании тепла. Напротив, в двигателях с внешним ротором теплогенерирующие катушки изолированы от окружающей среды корпусом ротора и магнитами. Из-за высокого момента инерции ротора и того факта, что корпус ротора с трудом поддается балансировке, двигатели с внешним ротором не подходят для очень высоких скоростей вращения.
Соответственно, двигатели с внутренним ротором используются в большинстве промышленных применений. Двигатели с внешним ротором демонстрируют свои преимущества при серийном применении, поскольку их производство дешевле. Их также можно сделать короче и обычно они имеют меньший момент фиксации, а также больший крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Оба двигателя обычно имеют три фазы. Однако существуют также конструкции с одной или двумя фазами. Далее будут описаны только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Двигатели с внутренним и внешним ротором изготавливаются с щелевыми обмотками; здесь провод обмотки наматывается на башмаки полюсов статора (железный сердечник), что позволяет линиям магнитного поля обмотки вытекать и концентрироваться в определенной форме. Статор состоит из тонких, смещенных друг к другу изолированных металлических пластин для сведения к минимуму потерь на вихревые токи.
Двигатели BLDC без пазов представляют собой особый тип двигателя с внутренним ротором, который очень популярен в очень маленьких двигателях. Их статоры состоят только из кольцеобразных металлических пластин, а внутри закреплена плоская, склеенная или герметизированная обмотка. Поскольку нет железного сердечника, индуктивность двигателя очень мала и ток в обмотках быстро возрастает. Кроме того, потери в железе значительно снижены, а двигатели имеют более высокий КПД. При медленной работе положительно сказывается отсутствие пульсаций крутящего момента. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных башмаках и отсутствует фиксирующий крутящий момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, так как их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается незаполненной между обмотками.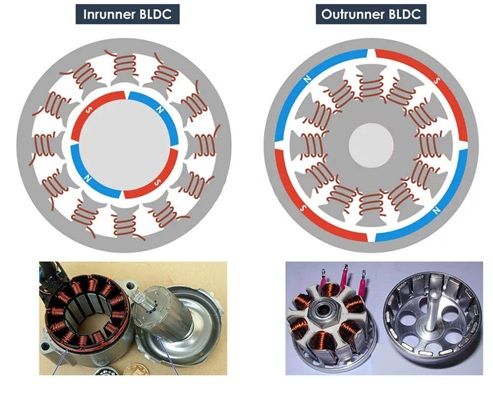 С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
Двигатель с внутренним ротором Двигатель с постоянным ротором Двигатель постоянного тока без пазов
2. Управление/коммутация двигателя
Двигатель постоянного тока вращается, потому что постоянный магнит на роторе пытается выровняться в направлении магнитного поля, создаваемого электромагнитами статора. При этом крутящий момент максимален, когда оба магнитных поля перпендикулярны друг другу. Тип управления различают двояко: по форме питания обмоток (блочное или синусоидальное) или по способам определения положения ротора. Необходимо определить положение ротора, так как токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, т.е. он продолжал вращаться с заданной скоростью.
2.1 Коммутация блока
Положение ротора можно легко определить с помощью датчиков Холла в двигателе. Затем они могут переключаться соответствующим образом совмещенным магнитом на роторе в точное время, когда обмотка должна быть переключена. Тогда три обмотки соответствуют трем датчикам Холла; их состояния определяют, как должны быть соединены обмотки. Если три обмотки переключаются цифровым способом, т. е. на обмотках нет тока или полный ток, это называется блочной коммутацией. Эта комбинация датчиков Холла и блочной коммутации является технически самым простым методом приведения в действие бесконтактного двигателя постоянного тока. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора. Это связано с тем, что выравнивание магнитного поля статора остается постоянным через 60°, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине находится перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30° в точках переключения. В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
2.2 Синусоидальная коммутация
Оптимальной формой питания является синусоидальная коммутация, при которой каждая обмотка двигателя питается синусоидальной волной, сдвинутой на 120°, что приводит к постоянно вращающемуся магнитному полю статора с постоянной напряженностью. Как правило, если для определения положения ротора доступны только датчики Холла, можно также использовать синусоидальную коммутацию путем интерполяции между точками переключения. В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
Таким образом, для синусоидальной коммутации в идеале требуется система с более высоким разрешением для определения положения ротора. Обычно он состоит из оптического или магнитного энкодера, который постоянно определяет положение ротора с достаточной точностью и соответствующим образом регулирует ток.
2.3 Поле-ориентированное управление
Иногда поле-ориентированное управление все еще отличается от синусоидальной коммутации; однако часто оба термина используются взаимозаменяемо. Эти термины используются взаимозаменяемо, поскольку синусоидальная коммутация, как описано выше, оптимально управляет магнитным полем статора.
Если не учитывать, как работает сам регулятор тока, разница в описании синусоидальной коммутации не очевидна.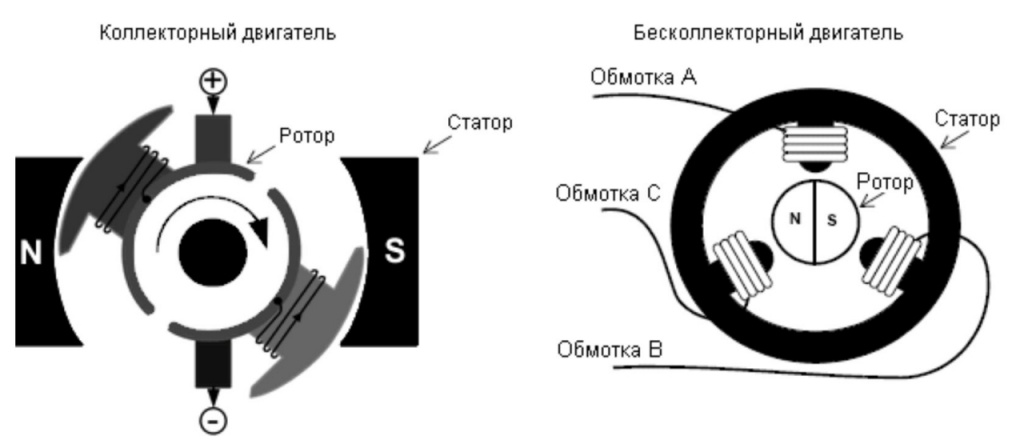 Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях могут возникать фазовые сдвиги и искажения токовых потоков, так что магнитное поле статора больше не перпендикулярно ротору.
Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях могут возникать фазовые сдвиги и искажения токовых потоков, так что магнитное поле статора больше не перпендикулярно ротору.
Управление по полю решает эту проблему, управляя вектором тока непосредственно во вращающейся системе координат ротора. Для этого измеренные токи трех фаз преобразуются посредством преобразования Кларка-Парка в двухосную систему координат ротора. Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
2.4 Бездатчиковое управление
Бездатчиковое управление – это не дополнительный метод управления, а скорее термин для методов, позволяющих определять положение ротора без датчиков (например, датчиков Холла, энкодеров). Эти методы можно условно разделить на два класса:
Простое бездатчиковое управление основано на прямом измерении противо-ЭДС в соответствующей обмотке, не находящейся под напряжением. Однако по сравнению со стандартным контролем этот метод требует специального оборудования и нестабилен ниже прибл. 20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
Более сложные решения основаны на так называемом «отслеживании наблюдателя», которое воспроизводит значения, не поддающиеся непосредственному измерению, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является чрезвычайно точная модель двигателя, которая параллельно с реальным двигателем вычисляет из известных входных значений, таких как установленный ШИМ, те значения, которые также измеряются, такие как текущий уровень в обмотка. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за ошибки наблюдения, определяемой этим методом, внутренние значения модели двигателя постоянно корректируются. С помощью этого метода также получают более точную оценку значений, которые фактически не измеряются, например скорости. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Общим для обоих бессенсорных методов является то, что информация о положении ротора недоступна на холостом ходу, поэтому требуется специальный метод запуска. Подобно шаговому двигателю, двигатель работает в управляемом режиме в течение нескольких коммутационных циклов, пока не наберет требуемую скорость и бездатчиковое измерение не позволит определить положение ротора.
3. Важные параметры
| Скорость холостого хода | Макс.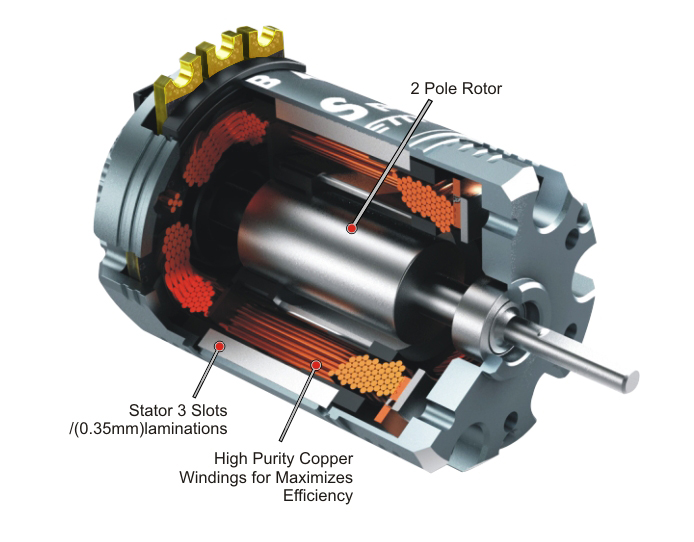 скорость вращения ненагруженного двигателя, определяемая, прежде всего, константой напряжения скорость вращения ненагруженного двигателя, определяемая, прежде всего, константой напряжения |
|---|---|
| Ток холостого хода | Ток на холостом ходу (потребление, необходимое для преодоления трения) |
| Номинальная скорость/номинальный крутящий момент | Номинальная рабочая точка |
| Максимальный крутящий момент | Моментально достижимый крутящий момент, обычно в 3 раза больше номинального крутящего момента в течение прибл. <- Предыдущий пост: Кромки резиновые: АЛМИР Подставка резиновая для защиты кромки каменных плит 40 мм, белая Следующий пост: Ками реутов: Яндекс Карты — подробная карта мира -> <- Предыдущий пост: Кромки резиновые: АЛМИР Подставка резиновая для защиты кромки каменных плит 40 мм, белая Следующий пост: Ками реутов: Яндекс Карты — подробная карта мира -> |
Всего комментариев: 0