Коллаборативные роботы это: что это такое — определение и применение
Содержание
Коботы
Работая совместно коботы могут существенно облегчить функции оператора. Фактически коллаборативные роботы сегодня преобразуют промышленный мир в значительной степени. Теперь коллаборативный робот и человек могут находится в едином пространстве. Коботы оснащены продвинутыми механизмами безопасности, обеспечивающим непрерывный контроль усилия, а так же контроль всех электрических параметров.
Безусловным преимуществом коллаборативных роботов являются низкие затраты на установку и ввод в эксплуатацию. Установка и программирование коботов несравнимо проще чем стандартных промышленных роботов благодаря режиму обучения. Коботы более гибкие чем промышленные роботы. Вы можете перемещать и перепрограммировать коботов в зависимости от возникающей задачи очень быстро и просто, что невозможно при работе с обычными промышленными роботами.
Из недостатков коллаборативных роботов можно отметить только невысокую грузоподъемность и сравнительно невысокую скорость работы по отношению к промышленным роботам.
Коботы находят очень широкое применение в большинстве промышленных производств, в том числе, в автомобильном, пищевом, упаковочном, металлообрабатывающем и др.
Что такое кобот?
Более 20 лет назад в университете штата Иллинойс два преподавателя машиностроения изобрели первого кобота. Майкл Пешкин и Эд Колгейт считаются изобретателями первого коллаборативного робота. В те годы считалось, что робот должен быть максимально автономных, хотя оба преподавателя настаивали на том, что совместная работа робота и человека зачастую может быть более эффективной. Некоторые задачи лучше способен выполнить человек, а некоторые робот. Это и послужило созданию идеи совместной работы машины и человека.
Коллаборативный робот, а сокращенно кобот это шести-осевой манипулятор, созданный для безопасной работы в промышленной среде совместно с человеком.
Коботы используются для перемещения, подъема, укладки или сборки деталей. Отлично подходят для перемещения упакованной продукции на паллету в конце производственной линии.
Из-за того что коботы предназначены для работы в тесном контакте с людьми, они работают на более низких скоростях чем промышленные роботы. Если кобот сталкивается с препятствием он запрограммирован на мгновенную остановку.
Что бы остановить кобота, в большинстве случаев, достаточно прикосновения с небольшим усилием руки к коботу.
Что может делать кобот?
- Коллаборативные роботы имеют ряд существенных преимуществ в сравнении с промышленными роботами.
- Важная особенность в производительности и эффективности. Коботы нужны что бы заменить персонал, выполняющий повторяющиеся однообразные операции, часто связанные с опасностью для здоровья человека. Соответственно оператор может быть занят более квалифицированными задачами и контролем качества, тем самым возникает ситуация когда возрастает качество производства.
- Коботы быстро устанавливаются и их легко запрограммировать.
- Оператор способен сам выполнить перемещение кобота и ввод в эксплуатацию в случае сменяющихся производственных задач.

- Для работы кобота не требуется создания специальных защитных ограждений и дорогостоящих систем безопасности.
- Коботы заметно дешевле промышленных роботов и являются доступными для небольших и средних компаний.
- При внедрении коботов можно сохранить эргономику рабочего места.
- Они позволяют решать проблему социальной дистанции в свете новых проблем из-за COVID-19.
- Безопасны для человека.
- Коботы более универсальны в сравнении с привычными роботами или системами автоматизации.
Как выбрать?
Выбор коботов не такой большой, как, например, промышленных роботов. Universal Robots предлагает четыре типоразмера. Основные критерии для выбора это: Досягаемость или радиус действия и грузоподъемность (полезная нагрузка).
| Модель | Полезная нагрузка, кг | Радиус действия, мм |
|---|---|---|
| UR3e | 3 | 500 |
| UR5e | 5 | 850 |
| UR10e | 10 | 1300 |
| UR16e | 16 | 900 |
Область применения
Основные виды производственных участков где применяются коллаборативные роботы следующие:
- Захват и перенос (Pick-and-Place)
- Производственные линии: паллетизация, укладка продукта в тару, полировка, маркировка, этикетирование, испытания жизненного цикла
- Станки – установка заготовки в станок и последующая выгрузка обработанной детали
- Сборочные линии и процессы завинчивания, нанесения клея или герметика, сварочные операции
Использование коллаборативных роботов возможно повсеместно от автомобильной и электронной промышленности до медицины, сельского хозяйства и образовательных учреждений в качестве учебных стендов по робототехнике и автоматизации.
В автомобильной промышленности первые коботы появились у таких гинантов как BMW, Volkswagen и Audi. У этих автопроизводиелей коботы Universal Robots применялись для сборки дверей автомобилей, установки свечей накаливания в двигателях и операциях по нанесению герметика на детали. Сегодня большинство автопроизводителей по всему миру выбрали коллаборативных роботов Universal Robots в качестве базового коллаборативного робота для выполнения задач роботизации. В настоящее время более 46000 производственных участков по всему миру автоматизированы с помощью коботов Universal Robots.
Безопасный коллаборативный робот — что это, для чего и как кодить
Всем привет. Мы студенты Одесской национальной академии пищевых технологий и на сегодняшний момент уже сотрудники одной Украинской компании — интегратора промышленной робототехники. Наша статья посвящена новому тренду в робототехнике — коллаборативной робототехнике и будет интересна в первую очередь всем гикам, программистам, мейкерам инженерам и автоматчикам действующих предприятий и студентам технических университетов, короче всем неравнодушным к вопросу развития робототехники вообще в Мире и в Украине в частности.
С каждым днем все больше набирает популярность такое понятие как «коллаборативный робот». Это автоматическое устройство, которое может работать совместно с человеком для создания или производства различных продуктов. Как и промышленные роботы, коботы состоят из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Коллаборативные роботы применяются на производстве в решении задач, которые нельзя полностью автоматизировать. Из-за нехватки рабочей силы, необходимой для выполнения черных и однообразных действий, многие компании решаются устанавливать коботов на своем производстве.
Экономичные, универсальные, безопасные, простые в использовании коллаборативные роботы (коботы) позволяют повысить контроль на любом предприятии. Коботы никогда не болеют, не покидают рабочее место без предупреждения, не страдают от скуки, не получают травмы и не требуют много времени для обучения новым процессам. Из-за перечисленных причин они становятся важным и неотъемлемым дополнением к будущей рабочей силе.
Из-за перечисленных причин они становятся важным и неотъемлемым дополнением к будущей рабочей силе.
Коботы, в отличие от обычных промышленных роботов, очень просты в программировании. Им можно дать рабочие инструкции без кодирования, используя графический интерфейс пользователя и соответственно не нужно каждый раз обращаться к поставщикам с целью изменения строчек кода. Например в нашем случае, распаковать роботов, включить и научится программировать простейшие циклические задачи у нас ушло менее часа. При том, что никто из нас не имел никакого предварительного скила в их программировании, да и в программировании вообще. К слову роботы в нашей лаборатории появились в результате освоения одного из грантов, который Университет выиграл для развития своей материально — технической базы.
Они оснащены датчиками, которые контролируют положение человека и не допускают причинение ему вреда. Некоторые модели можно устанавливать непосредственно на рабочих местах. Некоторые модели коботов способны обучаться. Например, вначале работник может переместить манипулятор руками по желательным траекториям в необходимые позиции; в дальнейшем кобот будет повторять эти движения самостоятельно. Таким образом, сотрудники могут легко перепрограммировать коботов и использовать их для решения самых разных задач.
Например, вначале работник может переместить манипулятор руками по желательным траекториям в необходимые позиции; в дальнейшем кобот будет повторять эти движения самостоятельно. Таким образом, сотрудники могут легко перепрограммировать коботов и использовать их для решения самых разных задач.
Коботы значительно дешевле промышленных роботов. Для их размещения, как правило, не требуется выделять дополнительные производственные площади, их не нужно ограждать заборами «безопасных» для человека зон. Но скорость их движений меньше, чем у промышленных роботов (а значит, ниже и производительность), меньше и создаваемые коботами усилия. Таким образом, их нельзя использовать в случаях где необходима значительная грузоподъемность (более 16кг) или вылет руки более 1,3 метра и где нужны огромные скорости выполнения (для больших скоростей предпочтительнее использовать SCARA или Delta конструктивы промышленных роботов).
Большинство коллаборативных роботов имеют небольшие размеры по сравнению с обычными промышленными роботами и требуют питания лишь в 220 В.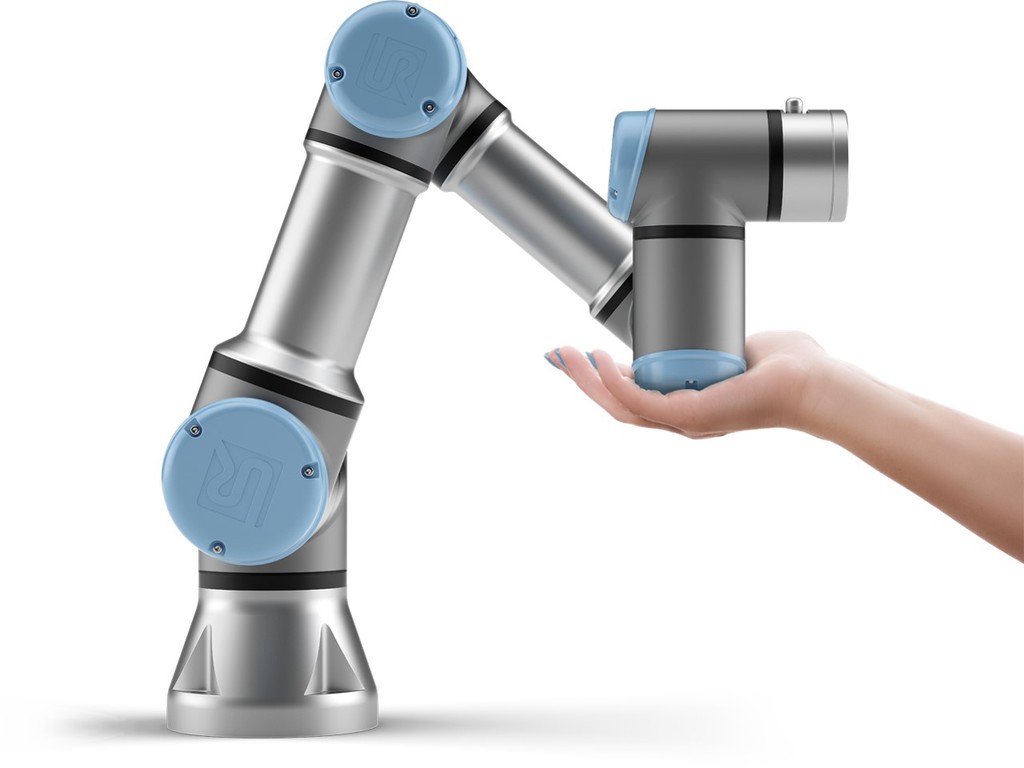 Поэтому их можно относительно легко перемещать и использовать в разных точках производственной цепочки. Коботы обычно способны манипулировать грузами массой до 10 кг (хотя уже стали появляться коллаборативные роботы с грузоподъёмностью до 16 кг). Особенно хорошо они выполняют повторяющиеся действия, такие как расстановка, упаковка, нанесение клея или пайка, сборка, погрузка, обслуживание станков, тестирование качества и сварка.
Поэтому их можно относительно легко перемещать и использовать в разных точках производственной цепочки. Коботы обычно способны манипулировать грузами массой до 10 кг (хотя уже стали появляться коллаборативные роботы с грузоподъёмностью до 16 кг). Особенно хорошо они выполняют повторяющиеся действия, такие как расстановка, упаковка, нанесение клея или пайка, сборка, погрузка, обслуживание станков, тестирование качества и сварка.
Коботы можно устанавливать на любой поверхности — горизонтальной, вертикальной, а некоторые, в случае производственной необходимости, — даже «вверх тормашками».
Как правило, внедрение коботов не требует больших инвестиций, поэтому они хорошо подходят для использования в малом и среднем бизнесе.
История
В 2008 году датская компания Universal Robots совершила революцию в мире робототехники и выпустила коллаборативного робота в том виде, в котором мы знаем его сегодня: самостоятельное устройство, которое может работать в непосредственной близости от человека и быть абсолютно безопасным. Компания Universal Robots была учреждённая еще в 2005 году студентами Эсбеном Остергордом (Esben Østergaard), Каспером Стёй (Kasper Støy) и Кристианом Кассоу (Kristian Kassow), которые познакомились в Университете Дании. Обобщенно, научным направление изысканий ребят было сделать роботизированные технологии доступными для малых и средних предприятий. Основание компании стало возможным благодаря инвестициям Syddansk Innovation. Первая выпущенная модель UR5 имела грузоподъемность 5 кг, чего было вполне достаточно для большинства операций.
Компания Universal Robots была учреждённая еще в 2005 году студентами Эсбеном Остергордом (Esben Østergaard), Каспером Стёй (Kasper Støy) и Кристианом Кассоу (Kristian Kassow), которые познакомились в Университете Дании. Обобщенно, научным направление изысканий ребят было сделать роботизированные технологии доступными для малых и средних предприятий. Основание компании стало возможным благодаря инвестициям Syddansk Innovation. Первая выпущенная модель UR5 имела грузоподъемность 5 кг, чего было вполне достаточно для большинства операций.
Ключевыми потребителями новой продукции стали небольшие производственные предприятия с конвейерным производством. Промышленные решения были не по карману малому бизнесу. Тем более, они накладывали серьезные ограничения на общую мобильность производства и требовали наличия значительных производственных площадей.
С момента появления первых коботов прошло больше 10 лет. При этом ежегодно рынок коллаборативной робототехники увеличивается на 50%.
Успех Universal Robots породил настоящую «коботоманию». В течение нескольких лет один за другим свои коллаборативные модификации выпустили как гиганты робототехники — ABB, Кuka, Fanuc, Yaskawa, — так и молодые фирмы: Kinova, Rethink Robotics, Franka. По данным Barclays Equity Research, количество продаваемых коботов вплотную приблизится к 1 млн штук ежегодно к 2025 году.
В течение нескольких лет один за другим свои коллаборативные модификации выпустили как гиганты робототехники — ABB, Кuka, Fanuc, Yaskawa, — так и молодые фирмы: Kinova, Rethink Robotics, Franka. По данным Barclays Equity Research, количество продаваемых коботов вплотную приблизится к 1 млн штук ежегодно к 2025 году.
На сегодняшний день в Украине есть только один официальный дистрибьютор Universal Robots. Этот кредит доверия от зачастую старомодных и часто заскорузлых европейцев был получен молодыми ребятами из Qweedo Robotics — выходцам Одесской Лаборатории Мехатроники и Робототехники — MiRONAFT FabLab (FabLab — Fabrication Laborotory, открытая лаборатория цифрового производства, входящая в сеть аналогичных лабораторий по всему миру). Про лабораторию уже писали на портале DOU в статье «Проектор: MiRONAFT FabLab — самая большая в Украине лаборатория робототехники, открытая для всех». Лаборатория и сегодня находится в Одесской Национальной академии пищевых технологий и открыта для всех желающих 6 дней в неделю и все также в ней регулярно проводят экскурсии для детей и не только.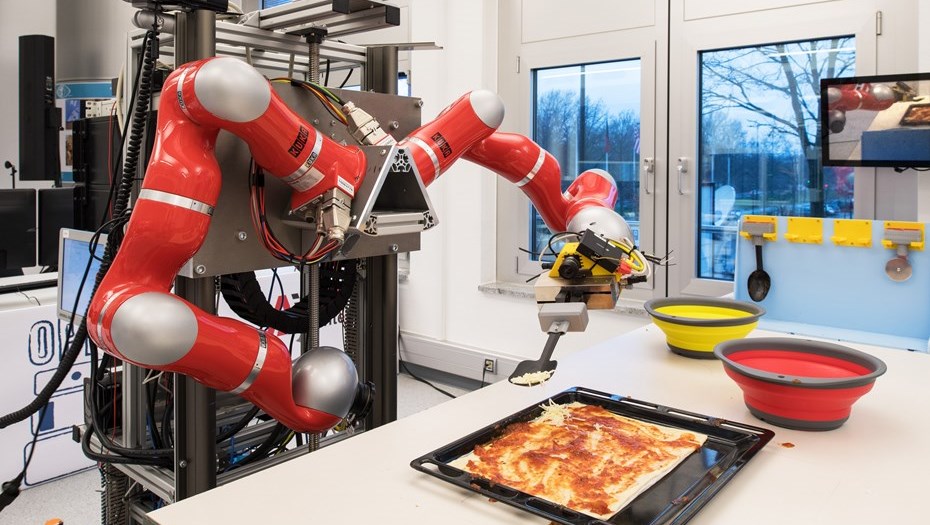 Так что и сегодня любой, даже далекий от робототехники человек, может попробовать себя в роли интегратора, и написать программу на контроллере.
Так что и сегодня любой, даже далекий от робототехники человек, может попробовать себя в роли интегратора, и написать программу на контроллере.
Наш опыт
На сегодняшний день у нас уже есть значительный опыт интеграции таких роботов, достаточный для решения любого «проблемного» участка. Причем запросы были самые разные, а иногда курьезные: от применения коботов в учебном процессе для студентов и школьников до промышленных задач перемещения продуктов на конвейере до автоматизации сварочных работ и обслуживания больших промышленных ЧПУ фрезеров. Например, в сотрудничестве с одной из столичных студий фото/видео сьемки мы интегрировали робота для видео сьемки (тут и тут). Вышло круто))
К сожалению, описывать подробно большинство этих кейсов нам еще ближайших где 5, где 10 лет запрещают целая серия подписанных NDA. Те же роботы, которые установлены на базе Одесской Национальной академии пищевых технологий в нашей лаборатории напротив — доступны для всех желающих научится их программировать. Мало того, понимая, что для этого мало кто сможет специально приехать в Одессу — мы запланировали на этот год целую серию бесплатных! выездных мастер-классов в рамках единого турне: Одесса — 26 июня (приглашаем предприятия Одесской, Херсонской и Николаевской областей. Работаем на базе лаборатории FabLab MiRONAFT университета Одесской национальной академии пищевых технологий), Харьков — 07 августа (приглашаем предприятия Харьковской, Сумской и Полтавской областей. Работаем на базе Научного парка «Синергия» Харьковского национального университета радиоэлектроники), Луцк — 11 сентября (приглашаем предприятия Луцкой, Ровненской и Тернопольской областей. Работаем на базе Луцкого национального технического университета), Днепр — 25 сентября (приглашаем предприятия Днепровской, Запорожской и Кировоградской областей. Работаем на базе Национального технического университета «Днепровская политехника»), Львов — 30 октября (приглашаем предприятия Львовской, Ивано-франковской и Ужгородской областей.
Мало того, понимая, что для этого мало кто сможет специально приехать в Одессу — мы запланировали на этот год целую серию бесплатных! выездных мастер-классов в рамках единого турне: Одесса — 26 июня (приглашаем предприятия Одесской, Херсонской и Николаевской областей. Работаем на базе лаборатории FabLab MiRONAFT университета Одесской национальной академии пищевых технологий), Харьков — 07 августа (приглашаем предприятия Харьковской, Сумской и Полтавской областей. Работаем на базе Научного парка «Синергия» Харьковского национального университета радиоэлектроники), Луцк — 11 сентября (приглашаем предприятия Луцкой, Ровненской и Тернопольской областей. Работаем на базе Луцкого национального технического университета), Днепр — 25 сентября (приглашаем предприятия Днепровской, Запорожской и Кировоградской областей. Работаем на базе Национального технического университета «Днепровская политехника»), Львов — 30 октября (приглашаем предприятия Львовской, Ивано-франковской и Ужгородской областей. Работаем на базе Tech StartUp School Национального университета «Львовская политехника»), Киев — 27 ноября (приглашаем предприятия Киевской, Житомирской, Черниговской и Черкасской областей. Работаем на базе Национального технического университета Украины «Киевский политехнический институт имени Игоря Сикорского») и Винница — 11 декабря (приглашаем предприятия Винницкой, Черновицкой и Хмельницкой областей. Работаем на базе Винницкого национального технического университета). Все карантинные ограничения и предосторожности обещаем соблюсти! В частности, количество мест строго ограничено.
Работаем на базе Tech StartUp School Национального университета «Львовская политехника»), Киев — 27 ноября (приглашаем предприятия Киевской, Житомирской, Черниговской и Черкасской областей. Работаем на базе Национального технического университета Украины «Киевский политехнический институт имени Игоря Сикорского») и Винница — 11 декабря (приглашаем предприятия Винницкой, Черновицкой и Хмельницкой областей. Работаем на базе Винницкого национального технического университета). Все карантинные ограничения и предосторожности обещаем соблюсти! В частности, количество мест строго ограничено.
Зарегистрироваться для участия в мастер-классах могут все желающие по ссылке.
Технические особенности коллаборативных роботов
О контроллерах и блоках управления, рассмотрим на примере Universal Robots UR5 E-Series. Блок управления (Control Box) данного робота имеет 16 цифровых входов и выходов, 2 аналоговых входа и выхода, связь USB 2.0, USB 3.0 (чтобы загрузить операционную систему через usb-флешку), Ehternet, Modbus TCP, PROFINET.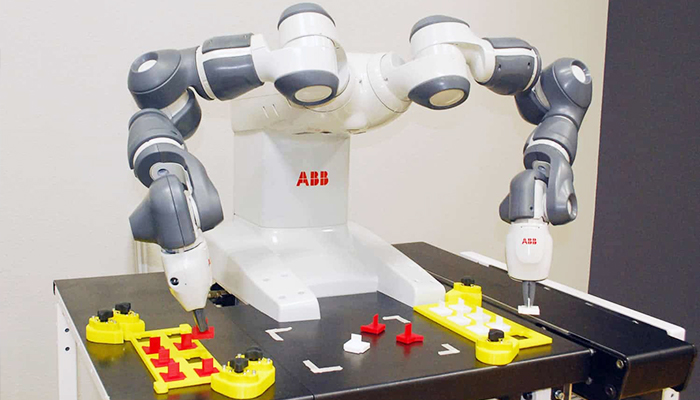
На внешней стороне блока управления (проще — контроллер) размещается крепление для блока обучения, так называемого Teach Pendant. По сути, это планшет с сенсорным экраном, на котором изображен интерфейс для программирования робота, так на задней части блока обучения присутствует usb порт для загрузки каких-либо программ.
На верхней части контроллера размещается кнопка Free Drive при зажатии которой мы можем задать роботу движения вручную. Проще говоря, своими руками, взяв робота за любое плечо и перемещая куда нам угодно. Сам Teach Pendant соединяется с блоком управления кабелем и имеет кнопку аварийной остановки робота в случае какой-либо экстренной ситуации.
С классом защиты IP64, уровнем шума 70дБ (сопоставимо с большинством современных обычных холодильников) и точностью позиционирования в 0.03 мм эти 6-ти осевые коллаборативные «работяги» являются незаменимыми в роботизации большинства технологических процессов и не только. Все чаще коллаборативные роботы в виду их безопасности начинают использовать для нетипичных направлений: например, для автоматизации ресторанов, кафе, пиццерий, для автоматизации кино/фото студий, сферы развлечений и здравоохранения.
И как же всё-таки программируются эти коллаборативные роботы
Есть различные способы, но сразу уточним, что я сам не являюсь IT-специалистом и имел опыт лишь в написании кода html/css, однако мне не составило большого труда создавать какие-либо программы для коботов способами которые будут описаны ниже.
Если у Вас не получается принять участие в одном из запланированных бесплатных мастер-классов в этом году, то для того, что бы лучше понимать что к чему вы можете зарегистрироваться на сайте Universal Robots Academy пройти бесплатный курс обучения онлайн, прямо в браузере, состоящий из различных уровней сложностей, начиная со знакомства с самим роботом, заканчивая программированием робота на конвейерном производстве.
Первый способ: Программирование непосредственно на блоке обучения (контроллере) и при наличии робота. Способ создания программы не зависит от вида робота, так что метод одинаковый для любого из URов (учитываем только грузоподъемность робота, полезную нагрузку, габариты, safety-зону и так далее).
Интерфейс операционной системы Universal Robots (на базе Linux), довольно простой и понятный. Для начала включаем питание робота, после чего мы можем разблокировать сервоприводы, и проводить с роботом любые манипуляции.
В распоряжении у нас есть 4 вида движений:
- MoveJ — используется в основном для перемещения робота в пространстве.
- MoveL — для перемещения робота строго по прямым (для соблюдения точности в работе с координатами и т. д.).
- MoveP — перемещать инструмент в линейном движении с постоянной скоростью с помощью скруглений и предназначен для технологических операций, таких как герметизация или дозирование.
- MoveC — для кругового перемещения.
Для точной работы кобота, инструменту (tool — на английском) который использует наш UR нужно зажать точку TCP, полезную нагрузку (payload), и center of gravity. Подробнее об этом можно узнать на сайте Universal Robots.
После этого мы можем программировать робота и задавать ему передвижения в контексте тех что были приведены выше.
Второй способ: доступен всем и каждому, у кого есть компьютер, способ обобщенный для всех роботов и заинтересует программиста.
Для программирования нашего кобота можно использовать различные программы, в которые загружены 3д модели UR-ов (и не только), а также можно создавать внешнюю среду, писать программы на Python, после чего можно загрузить код в робота.
Одна из таких программ, это RoboDK, исходя из личного опыта, могу сказать что так же далекий от программирования человек без особых трудностей может освоить данный софт, обучаясь с помощью видео уроков на YouTube.
Итак, что мы имеем
Коллаборативная робототехника — это быстро, недорого, просто в освоении, ну и конечно же — в тренде! Несмотря на НЕ самую лучшую экономическую обстановку в Украине на сегодня и не смотря на колоссальный отток профессиональных кадров, современные производства продолжают развиваться, а коботов становиться больше.
Темпы отечественных интеграторов говорят о том, что следом за Мировой тенденцией нас ждет самая настоящая коллаборативная революция, притом в ближайшие лет 5. Это говорит о том, что и любая другая робототехника станет доступнее для простых обывателей, и надеемся, что это послужит развитием различных направлений в школах и университетах, как это и произошло в нашем родном универе, где находится наша лаба.
Это говорит о том, что и любая другая робототехника станет доступнее для простых обывателей, и надеемся, что это послужит развитием различных направлений в школах и университетах, как это и произошло в нашем родном универе, где находится наша лаба.
Авторы статьи: Жигунов Иван, Тельпашов Кирилл https://dou.ua
Что такое коллаборативные роботы, коботы
Коллаборативные роботы — это форма роботизированной автоматизации, созданная для безопасной работы вместе с людьми в общем совместном рабочем пространстве. В большинстве приложений совместный робот отвечает за повторяющиеся, второстепенные задачи, в то время как человек выполняет более сложные и трудоемкие задачи. Точность, время безотказной работы и повторяемость коллаборативных роботов предназначены для дополнения интеллекта и навыков решения проблем человека-работника.
Конструкции коллаборативных роботов сильно отличаются от их аналогов промышленных роботов. Коллаборативные роботы с закругленными краями, ограничениями по силе и малым весом в первую очередь предназначены для обеспечения безопасности. Большинство коллаборативных роботов оснащены рядом датчиков, чтобы избежать столкновений с людьми, а также протоколами безопасности для отключения в случае любого незапланированного контакта.
Большинство коллаборативных роботов оснащены рядом датчиков, чтобы избежать столкновений с людьми, а также протоколами безопасности для отключения в случае любого незапланированного контакта.
Возможность совместной работы с людьми значительно расширяет возможности применения роботизированной автоматизации. Ожидается, что рынок коллаборативных роботов будет расти в геометрической прогрессии, поскольку все больше и больше отраслей осознают прибыль, которую можно получить от этой технологии.
Благодаря большому рыночному потенциалу в ряде отраслей внутри и за пределами фабрики коллаборативные роботы станут захватывающей технологией, за которой нужно следить, поскольку они становятся важной формой роботизированной автоматизации.
Коллаборативные роботы рассчитаны на взрывной рост. По данным Interact Analysis, в 2017 году отрасль оценивалась примерно в 400 миллионов долларов, но к концу 2018 года она вырастет на 60% до 600 миллионов долларов. Этот быстрый рост — только начало, так как ожидается, что к 2027 году рынок достигнет 7,5 миллиардов долларов США, что составляет 29% всего рынка промышленных роботов.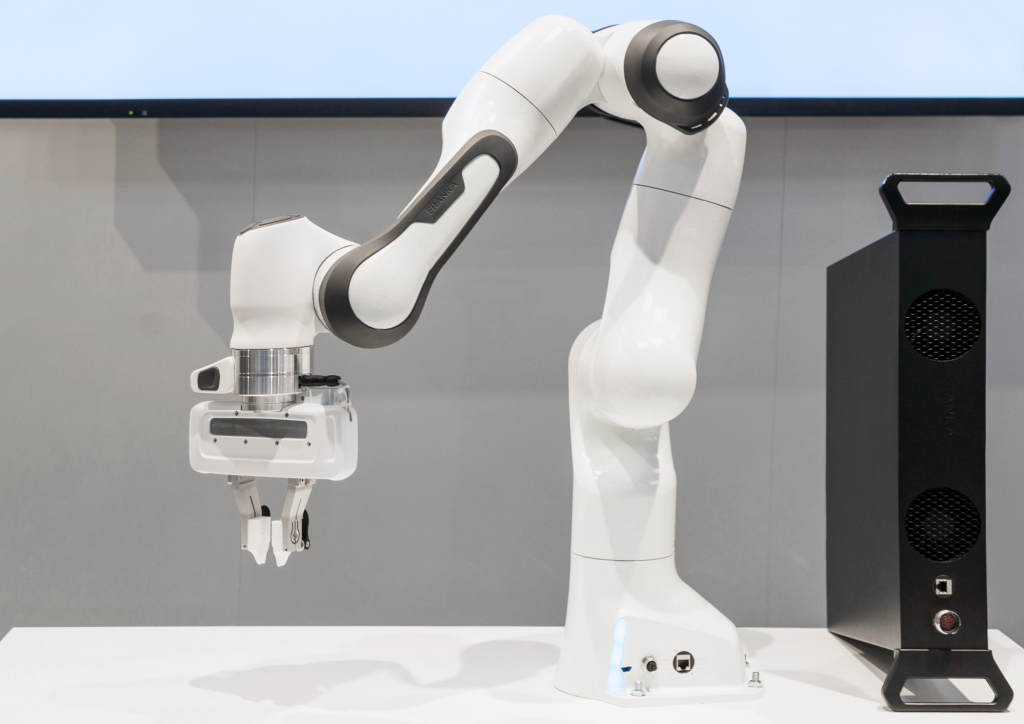
Ожидается, что к 2027 году рынок достигнет 7,5 миллиардов долларов США. весь. Существует несколько различных факторов этого роста, в том числе:
- Нехватка квалифицированных рабочих
- Увеличение затрат на оплату труда
- Высококачественные смеси продуктов с более коротким временем цикла
- Большая потребность в гибкости автоматизации
- Более строгие требования для более быстрой окупаемости инвестиций и прибыльности
В последние несколько лет коллаборативные роботы пользуются наибольшей популярностью среди малого и среднего бизнеса (СМБ). Как правило, малые и средние предприятия отдавали предпочтение коллаборативным роботам из-за их более низких первоначальных затрат, значительно меньшего размера и способности обеспечивать рентабельность инвестиций в средах с небольшими партиями. Однако это скоро изменится, поскольку ожидается, что крупные OEM-производители начнут массово внедрять коллаборативных роботов, способствуя краткосрочному и долгосрочному росту рынка.
Ожидается, что среди этих крупных OEM-производителей автомобильная и электронная промышленность будут крупнейшими пользователями коллаборативных роботов. Каждый из них является известным новатором в области автоматизированного производства и, скорее всего, снова станет лидером, когда дело дойдет до коллаборативных роботов. Электронная промышленность, в частности, имеет высокую степень вариативности деталей и короткое время цикла — коллаборативные роботы хорошо подходят для этих приложений из-за их большей гибкости по сравнению с промышленными роботами.
В настоящее время на рынке коллаборативных роботов доминируют несколько крупных производителей. Ожидается, что в ближайшие годы ряд более мелких производителей роботов, как правило, из Азии, выйдут на рынок в качестве прорывной силы. Кроме того, крупные производители промышленных роботов начинают запускать решения для совместных роботов, что также обещает нарушить статус-кво. По мере того, как рыночный потенциал коллаборативных роботов становится очевидным, в отрасль будет приходить больше игроков, что приведет к усилению конкуренции и снижению цен.
Коллаборативные роботы могут использоваться в самых разных средах и приносят множество различных преимуществ по сравнению с традиционными промышленными роботами. Как правило, пользователь робота выбирает коллаборативного робота, когда ему необходимо отдавать приоритет безопасности, гибкости, низкой стоимости развертывания и быстрой окупаемости.
Безопасность
Коллаборативные роботы предназначены для минимизации риска несчастных случаев и травм на рабочем месте. Для приложений, требующих участия робота и человека, коллаборативный робот оснащен датчиками для предотвращения столкновений, ограничения силы, гладкой конструкции, защиты от перегрузки по току и пассивного соответствия в случае незапланированного контакта. Повышенная безопасность повышает производительность и снижает эксплуатационные расходы для пользователей роботов — два почти немедленных преимущества, которые обеспечивают коллаборативные роботы.
Гибкость
Коллаборативные роботы могут быть легко запрограммированы даже работниками, не имеющими знаний в области программирования роботов. В некоторых случаях роботу можно показать, как выполнять задачу, физически перемещая руку робота в нужные места. Это позволяет коллаборативным роботам автоматизировать несколько различных задач с быстрой переналадкой. Эта гибкость снижает первоначальные затраты на автоматизацию и напрямую способствует рентабельности инвестиций и производительности.
В некоторых случаях роботу можно показать, как выполнять задачу, физически перемещая руку робота в нужные места. Это позволяет коллаборативным роботам автоматизировать несколько различных задач с быстрой переналадкой. Эта гибкость снижает первоначальные затраты на автоматизацию и напрямую способствует рентабельности инвестиций и производительности.
Недорогое развертывание
Простота программирования коллаборативного робота сокращает время и ресурсы, необходимые для интеграции, что снижает инвестиции в автоматизацию. Коллаборативные роботы оснащены функциями безопасности и не требуют ограждений или другого оборудования для промышленной безопасности, что еще больше снижает затраты и сокращает время интеграции. Низкая стоимость развертывания коллаборативного робота, по крайней мере, по сравнению с промышленными роботами, делает их гораздо более доступными для более широкой клиентской базы.
Быстрая окупаемость инвестиций
Коллаборативные роботы доказали свою способность обеспечивать более быструю окупаемость инвестиций, чем их промышленные аналоги.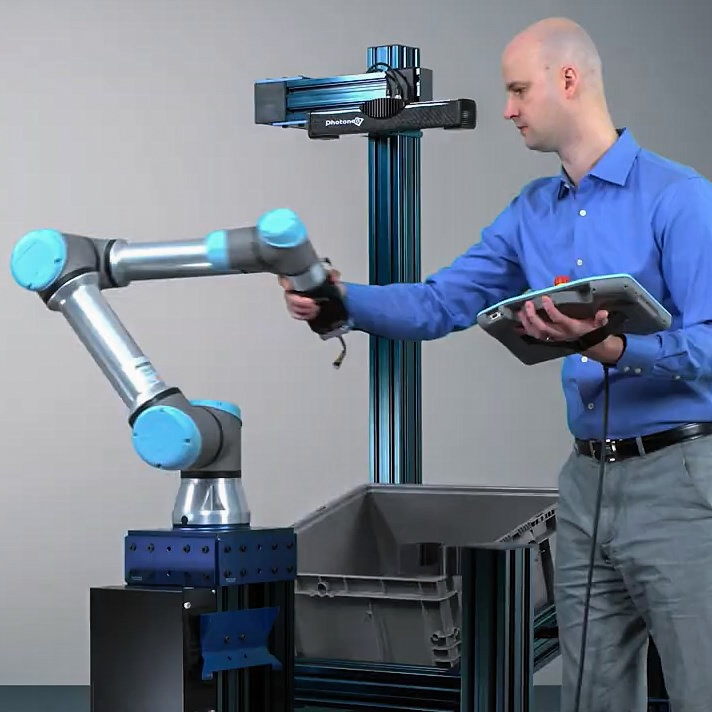 Это в первую очередь связано с тем, что первоначальные затраты значительно ниже, на одного робота можно автоматизировать больше задач, а коллаборативные роботы способствуют высокой производительности. Для тех, кто не может слишком сильно рисковать вложениями в автоматизацию, коллаборативные роботы обеспечивают надежную окупаемость инвестиций, обычно всего за несколько месяцев.
Это в первую очередь связано с тем, что первоначальные затраты значительно ниже, на одного робота можно автоматизировать больше задач, а коллаборативные роботы способствуют высокой производительности. Для тех, кто не может слишком сильно рисковать вложениями в автоматизацию, коллаборативные роботы обеспечивают надежную окупаемость инвестиций, обычно всего за несколько месяцев.
Использование коллаборативных роботов дает множество преимуществ. По сравнению с промышленными роботами коллаборативные роботы часто являются более выгодным и продуктивным решением при использовании в правильных приложениях.
Гибкость коллаборативных роботов, а также их финансовая доступность делают их идеальным решением для широкого спектра отраслей и областей применения. Некоторые из наиболее распространенных отраслей, в которых сегодня используются коллаборативные роботы, включают:
- Автомобильная промышленность
- Электроника
- Общее производство
- Металлоконструкции
- Упаковка и переупаковка
- Пластик
- Продовольствие и сельское хозяйство
- Мебель и оборудование
- Фармацевтическая и химическая промышленность
- Научные исследования
Коллаборативные роботы могут использоваться разными способами. По мере развития технологий коллаборативных роботов и все большего числа отраслей, осознающих преимущества этих типов роботов в плане производительности, объемы продаж будут увеличиваться.
По мере развития технологий коллаборативных роботов и все большего числа отраслей, осознающих преимущества этих типов роботов в плане производительности, объемы продаж будут увеличиваться.
Коллаборативные роботы работают в условиях, в которых промышленные роботы были бы небезопасны или непродуктивны. Рыночный потенциал коллаборативных роботов внутри и вне заводских установок огромен. Будьте в курсе последних тенденций в технологии коллаборативных роботов и извлекайте выгоду из этого стремительного роста в ближайшем будущем.
Обязательно изучите будущее коллаборативных роботов, чтобы узнать о рыночных тенденциях и захватывающих технологических инновациях.
Что такое кобот? | Полное руководство по коллаборативным роботам
Что такое коллаборативный робот? В чем преимущества коботов? Какое влияние они оказывают на рабочих? Как вы программируете коботов? Чем они отличаются от промышленных роботов? Какие бренды коботов существуют? Какие инструменты они могут использовать? Для чего вы можете их использовать? В каких отраслях они лучше всего подходят? И с чего мне нужно начать, когда я хочу начать автоматизацию? Вы узнаете это здесь!
Что такое кобот?
Коботы — это новейшая технология в робототехнике, которая значительно изменила мир автоматизации.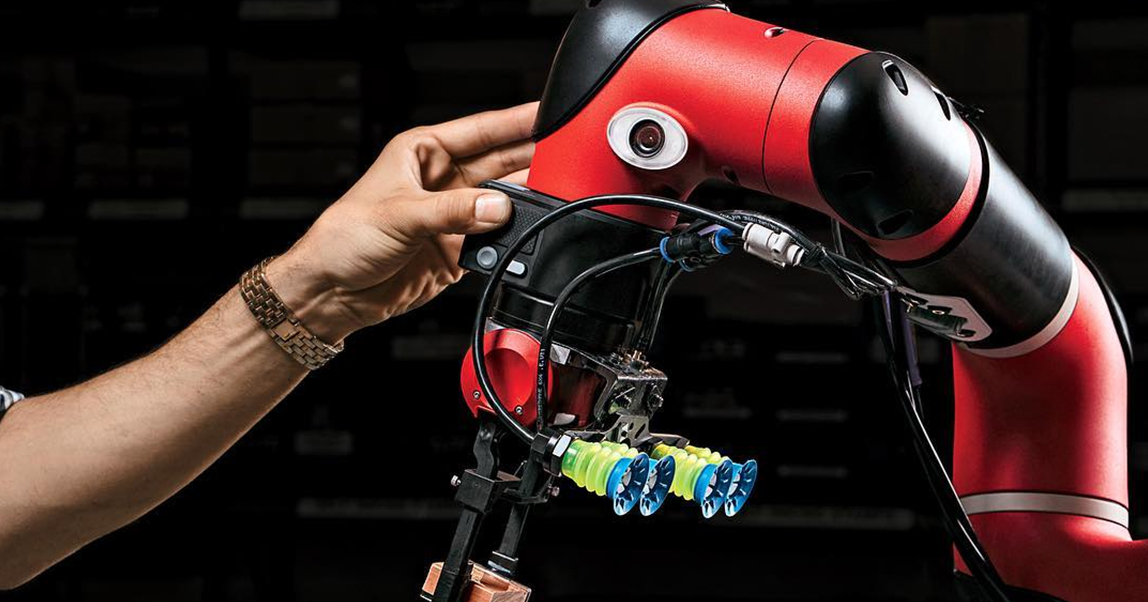 Название кобот является производным от «коллаборативный робот». Эти роботы являются коллаборативными, потому что они могут безопасно работать вместе с людьми. Они могут это сделать, потому что оснащены чувствительными датчиками, которые дают роботу «чувствовать». Если робот прервется в своей работе, он перейдет в безопасный режим. Традиционные роботы просто продолжали бы свой путь, потенциально травмируя людей.
Название кобот является производным от «коллаборативный робот». Эти роботы являются коллаборативными, потому что они могут безопасно работать вместе с людьми. Они могут это сделать, потому что оснащены чувствительными датчиками, которые дают роботу «чувствовать». Если робот прервется в своей работе, он перейдет в безопасный режим. Традиционные роботы просто продолжали бы свой путь, потенциально травмируя людей.
Помимо функций совместной работы, у роботов есть еще несколько преимуществ. Коботы уравняли правила игры для малых и средних производителей. На протяжении десятилетий крупные производители имели преимущество автоматизации за счет использования традиционных промышленных роботов. Но эти большие, дорогие и сложные роботы были разработаны для больших объемов и неизменных производственных процессов — в отличие от мелкосерийного производства с большим ассортиментом, характерного для небольших производителей.
Совместная автоматизация стала универсальной, рентабельной и удобной технологией, которая позволяет компаниям практически любого размера (и любого уровня технических знаний) повышать производительность, улучшать качество и быстрее реагировать на меняющиеся требования клиентов. Хороший способ решения различных задач, стоящих перед бизнесом.
Хороший способ решения различных задач, стоящих перед бизнесом.
Первый кобот был изобретен в 1996 году Дж. Эдвардом Колгейтом и Майклом Пешкиным. Они назвали кобота «устройством и методом прямого физического взаимодействия между человеком и управляемым компьютером манипулятором». За прошедшие годы было продано несколько коботов. Компания Kuka Robotics, которая также выпустила на рынок одного из первых промышленных роботов, выпустила своего первого кобота LBR 3 в 2004 году. Компания Universal Robots, один из крупнейших поставщиков роботов в мире, выпустила своего первого кобота UR5 в 2008 году. Четыре года спустя был запущен UR10, а в 2015 году — UR3.
Не пропустите ничего о коботах и автоматизации
Подпишитесь на нашу ежемесячную рассылку!
Более 500 компаний предшествовали вам!
Вы можете отказаться от подписки в любое время.
Преимущества коботов
Коботы имеют несколько уникальных функций, которые делают возможной автоматизацию для более широкого круга предприятий.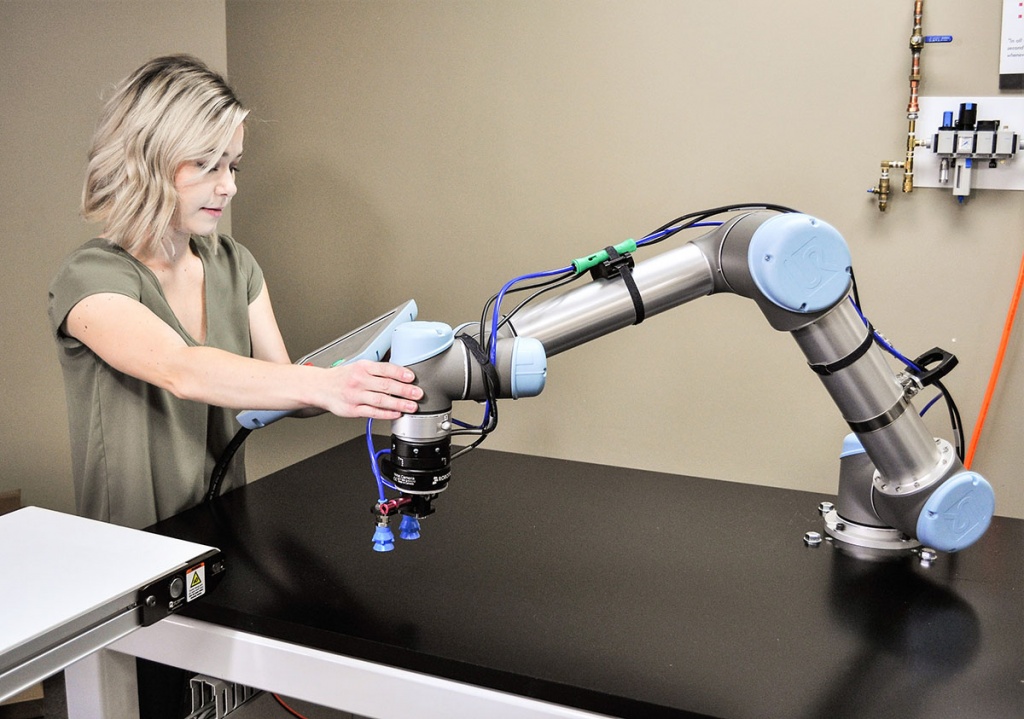 Ознакомьтесь с преимуществами коботов ниже.
Ознакомьтесь с преимуществами коботов ниже.
Влияние коботов на рабочих
Производственная работа, такая как упаковка товаров, пополнение запасов или работа на конвейере, характеризуется такими терминами, как «монотонная» и «повторяющаяся». Кроме того, этот тип работы часто является причиной RSI, повторяющихся травм от перенапряжения. Состояние, вызванное частым выполнением одних и тех же движений.
Если робот будет выполнять работу производственного рабочего, производственный рабочий сможет сосредоточиться на других задачах. Задачи, требующие творческого подхода и мышления, ориентированного на решение, например техническое обслуживание или контроль качества.
Предоставление работникам творческих и ориентированных на решение задач обогащает их работу и способствует личному развитию людей. Это также поощряет разнообразие и гибкость, создавая привлекательную рабочую среду. Подобные факторы гарантируют, что сотрудники получают больше удовольствия от своей работы, становятся более вовлеченными в работу, которую они выполняют, и становятся более продуктивными.
Программирование кобота
Традиционные роботы требуют много знаний и времени для программирования действий и могут выполнять только несколько действий. В отличие от традиционных роботов, используемых в настоящее время в промышленности, коботов легко программировать. Благодаря удобному программному обеспечению и мобильным приложениям коботы могут обучаться новым действиям. Вы также можете вручную перемещать кобота в нужные позиции и сохранять их в программе. Поскольку коботов так легко программировать, их можно быстро внедрить в процесс, и они даже могут выполнять разные задачи.
Коллаборативные роботы против промышленных роботов
Промышленные роботы и коботы имеют много общего, но у коботов есть некоторые уникальные особенности, которые делают их подходящими для гораздо более широкой аудитории. Оба робота имеют свои преимущества и недостатки. Это очень сильно зависит от задачи и продуктов, которые необходимо автоматизировать. Промышленные роботы подходят для крупных компаний, которые производят множество изделий стандартизированным способом. Небольшие компании могут извлечь выгоду из гибкости и экономичности кобота. При этом одно не исключает другого. Крупные компании также могут воспользоваться преимуществами коботов.
Небольшие компании могут извлечь выгоду из гибкости и экономичности кобота. При этом одно не исключает другого. Крупные компании также могут воспользоваться преимуществами коботов.
Коботы разных марок
За прошедшие годы количество производителей коботов значительно увеличилось. Всего насчитывается более 30 компаний, которые занимаются разработкой и производством коллаборативных роботов. Крупнейшая из них — Universal Robots. Они поставляют почти половину всех коботов по всему миру.
Каждый кобот имеет свои уникальные особенности и характеристики. Поэтому для проекта автоматизации важно посмотреть, каковы требования для успешной интеграции. Такие характеристики, как радиус действия, грузоподъемность, точность, скорость и количество осей, являются важными факторами, определяющими, подходит ли кобот для конкретного применения. WiredWorkers работает в основном с тремя брендами: Universal Robots, Techman Robot и Franka Emika.
Universal Robots
Universal Robots — крупнейший производитель коботов в мире, на долю которого приходится почти половина рынка. Всего они выпустили две разные серии с 7 разными коботами. Серия CB3 с UR3, UR5 и UR10. И серия E с UR3e, UR5e, UR10e и UR16e. Отличия включают более высокую точность и чувствительность благодаря встроенному датчику силы/крутящего момента, ориентированному на инструмент, в серии E. Роботы различаются по грузоподъемности и радиусу действия.
Всего они выпустили две разные серии с 7 разными коботами. Серия CB3 с UR3, UR5 и UR10. И серия E с UR3e, UR5e, UR10e и UR16e. Отличия включают более высокую точность и чувствительность благодаря встроенному датчику силы/крутящего момента, ориентированному на инструмент, в серии E. Роботы различаются по грузоподъемности и радиусу действия.
Робот Техник
Коботы Techman Robot уникальны тем, что имеют интегрированную систему обзора. На голове робота размещается камера, а сопутствующее программное обеспечение оснащено программами интеллектуального зрения. К ним относятся сопоставление с образцом, локализация объекта, сканирование штрих-кода и распознавание цвета. Программное обеспечение очень доступно даже для людей без знаний в области программирования. С TM5-700, TM5-900, TM12 и TM14 у них есть четыре робота, которые различаются полезной нагрузкой и радиусом действия.
Франка Эмика
Панда Франки Эмики — продвинутый робот, уникальной особенностью которого является его чувствительность и исключительная точность. Датчики размещены в семи суставах этого робота-манипулятора, что позволяет роботу манипулировать самыми хрупкими предметами. Panda имеет дальность полета 850 миллиметров и грузоподъемность 3 килограмма.
Датчики размещены в семи суставах этого робота-манипулятора, что позволяет роботу манипулировать самыми хрупкими предметами. Panda имеет дальность полета 850 миллиметров и грузоподъемность 3 килограмма.
Посетите наш виртуальный шоу-рум!
Онлайн-опыт для изучения мира коботов.
Различные инструменты для коботов
Коботы такие гибкие, потому что они могут быть оснащены различными инструментами. Несколько производителей по всему миру сосредоточены на разработке инструментов для коллаборативных роботов, которые позволяют коботам осваивать новые задачи и становиться еще более гибкими. Инструменты можно разделить на несколько категорий: захваты, инструменты на конце стрелы (EOAT), видение, программное обеспечение, расширители диапазона, системы безопасности и снабжения.
Захваты
Захваты позволяют коботу поднимать предметы и снова класть их в другом месте. Существует множество различных типов захватов для различных задач. К ним относятся пальцевые захваты, вакуумные захваты и магнитные захваты. Каждый захват подходит для разных задач. Например, мягкие захваты для еды и вакуумные захваты для захвата коробок. Захваты также имеют свои собственные характеристики, такие как полезная нагрузка, ширина захвата и усилие захвата.
К ним относятся пальцевые захваты, вакуумные захваты и магнитные захваты. Каждый захват подходит для разных задач. Например, мягкие захваты для еды и вакуумные захваты для захвата коробок. Захваты также имеют свои собственные характеристики, такие как полезная нагрузка, ширина захвата и усилие захвата.
End of Arm Tooling (EOAT)
End of Arm Tooling — собирательное слово для всех видов инструментов, которые могут быть установлены на коботе. Например, дозаторы клея, винтовые станки, шлифовальные машины, устройства смены инструмента, датчики и инструменты для сварки и пайки. Разработка этих инструментов значительно увеличилась в последние годы, так что коботы могут помочь все большему количеству производственных компаний увеличить свои производственные мощности.
Устройство смены инструмента
Чтобы сделать кобот более гибким, на рынке представлены различные автоматические устройства смены инструмента. Эти инструменты позволяют коботу полностью автономно менять инструменты, что позволяет ему выполнять несколько операций. Например, в сборочном приложении один кобот сначала использовал бы захват, чтобы разместить все детали в нужном месте, а затем использовал бы отвертку, чтобы прикрепить все это целиком. В конечном итоге это повышает производительность робота, увеличивает производительность и сокращает его рентабельность.
Например, в сборочном приложении один кобот сначала использовал бы захват, чтобы разместить все детали в нужном месте, а затем использовал бы отвертку, чтобы прикрепить все это целиком. В конечном итоге это повышает производительность робота, увеличивает производительность и сокращает его рентабельность.
Системы обзора
Системы обзора обеспечивают видимость кобота. С помощью 2D- или 3D-камер коллаборативные роботы могут находить объекты, сканировать штрих-коды и распознавать шаблоны. Это дает много преимуществ, но самое большое преимущество связано с поставкой продукции. Обычно коботу нужны структурированные потоки объектов для сбора предметов. Со зрением это не всегда нужно, потому что кобот видит, где находится товар.
Расширители диапазона
Расширители диапазона позволяют коллаборативным роботам иметь больший диапазон по оси X и/или оси Y. Например, кобот может перемещаться вперед и назад перед большой машиной для выполнения задачи на разных этапах процесса.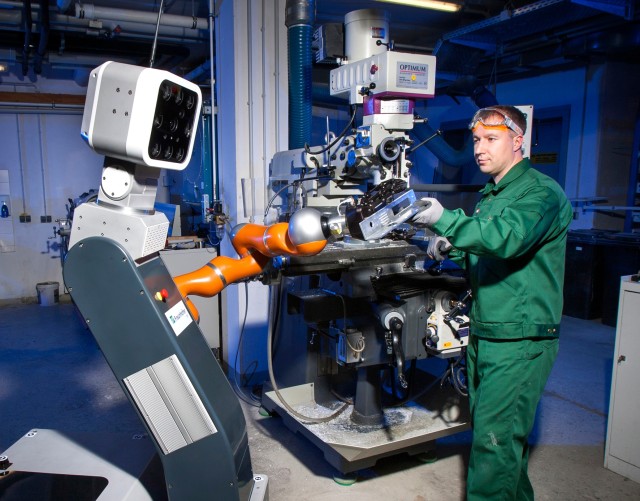
Безопасность
Безопасность включает в себя все инструменты, которые способствуют безопасности взаимодействия человека и кобота. Подумайте о датчиках или экранах, которые обнаруживают, когда кто-то подходит слишком близко к роботу.
Программное обеспечение
Доступно различное программное обеспечение для программирования и разработки приложения для совместной робототехники. Каждый кобот имеет свое интуитивно понятное и удобное программное обеспечение для программирования. Кроме того, доступно программное обеспечение для симулятора, которое можно использовать для проектирования надежной интеграции робота, прежде чем приступить к его фактической реализации.
Системы подачи
Системы подачи включают в себя устройства, которые предлагают объекты для обработки роботу. Например, инструмент, который всегда ставит винты на одно и то же место, готовый к тому, что робот (и винтовая машина) подберет винты и соберет их в конечный продукт. А также виброплиты, которые гарантируют, что накопленные предметы снова отделятся друг от друга.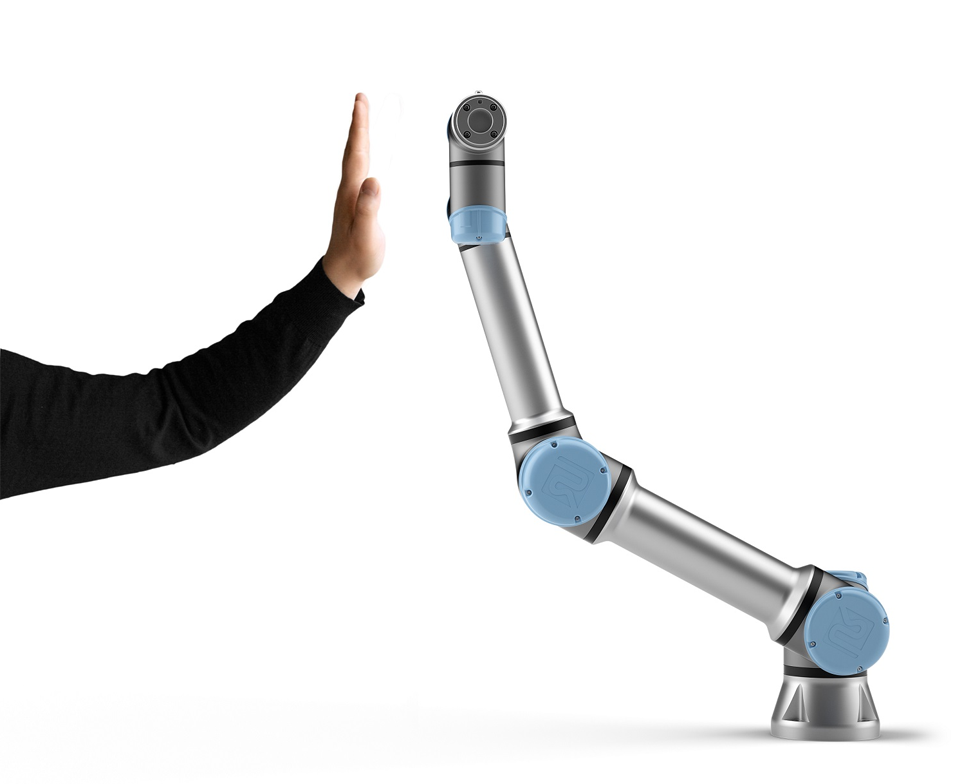
Применение коботов
Благодаря различным инструментам, удобному программному обеспечению и гибкости коботы могут выполнять самые разные задачи. Сочетание различных возможностей означает, что бесконечное количество действий может быть объединено в одно законченное приложение автоматизации. Теоретически кобот может научиться чему угодно. На практике есть несколько приложений, которые повторяются чаще всего, как показано ниже.
«Подбери и положи»
«Подбери и помести» очень просто подбирает и перемещает объекты. Например, сбор деталей из корзины и их сортировка на сборочной линии. Приложения Pick and Place очень просты в своей основе, но чем больше требуется инструментов, тем сложнее они становятся. Например, с помощью чувствительного захвата, двойного захвата или объектов разных размеров.
Комплектация из ящиков
Комплектация из ящиков аналогична сбору и размещению, только здесь объекты не доставляются стандартизированным способом. Благодаря интеллектуальному программному обеспечению и технологиям машинного зрения кобот распознает предметы в мусорном ведре и поднимает их один за другим. Полезно, например, для подачи конвейерной ленты.
Благодаря интеллектуальному программному обеспечению и технологиям машинного зрения кобот распознает предметы в мусорном ведре и поднимает их один за другим. Полезно, например, для подачи конвейерной ленты.
Обслуживание станков
Обслуживание станков — это установка деталей, например, на токарный станок с ЧПУ или гибочный станок. Пока робот выполняет свою работу, люди-операторы свободны. Это повышает безопасность работников и освобождает их для выполнения задач более высокого уровня. Это также повышает производительность, и производство может продолжаться после обычного рабочего дня для повышения производительности и гибкости бизнеса.
Укладка на поддоны
Укладка на поддоны (укладка коробок на поддоны) может быть организована более эффективно с помощью коллаборативных роботов, что дает много преимуществ. Ящики захватываются электрическими вакуумными захватами и укладываются на поддоны. Новые технологии устраняют необходимость во внешней подаче воздуха и шлангах, что облегчает интеграцию, снижает затраты и создает меньше шума и причинно-следственных связей. Помимо укладки на поддоны, конечно, кобот также может укладывать на поддоны.
Проверка и проверка качества
Коботы могут пригодиться для проверки и проверки качества в различных отраслях промышленности. Например, робот может помещать объекты в устройство для тестирования, а затем сортировать их. Подумайте о печатных платах или образцах в лаборатории. Благодаря технологии технического зрения у кобота также есть возможность проводить визуальный осмотр. Хороший способ улучшить контроль качества продукции.
Склеивание и герметизация
Склеивание и герметизация — отличные задачи для кобота. На конец кобота крепится шприц с герметиком или клеем. Кобот перемещается по заданной траектории и равномерно распределяет клей или герметик.
Сварка
Сварка — это задача, которая должна выполняться с максимальной точностью, и сварка с помощью коботов дает много преимуществ. Коботы более точны, чем люди, и поэтому обеспечивают более стабильное качество. Коботы могут выполнять сварку в самых разных областях. Вспомните Mig/Mag, TIG, точечную сварку, дуговую сварку, ультразвуковую сварку и плазменную сварку.
Пайка
Пайка — это точная работа, которую можно полностью автоматизировать с помощью коллаборативного робота. Коботы чрезвычайно точны, более точны, чем люди, и поэтому обеспечивают постоянное качество. Коботы могут выполнять как пайку, так и пайку.
Узнайте, как мы можем улучшить ваше производство
Закажите бесплатную онлайн-консультацию с нашим специалистом по автоматизации!
Совершенно бесплатно и без обязательств!
Различные отрасли для коботов
Благодаря их гибкости и тому факту, что коллаборативного робота можно научить чему угодно, их можно использовать где угодно. Есть несколько отраслей, где коботы идеально подходят и уже успешно интегрированы.
Пищевая промышленность
В последние годы потребность в автоматизации в пищевой промышленности возросла. Это вызвано несколькими причинами, такими как растущий спрос, более строгая безопасность пищевых продуктов и безопасность работников. Для пищевой промышленности автоматизация более сложна, чем для других отраслей, потому что роботам сложно напрямую обрабатывать пищевые продукты. Появление коботов и новой технологии захвата изменило ситуацию.
Пластмассовая промышленность
Пластмассовая промышленность характеризуется многокомпонентным мелкосерийным производством. Другими словами, большое разнообразие продуктов в небольших количествах. Этот тип производственного процесса трудно автоматизировать, поскольку производственный процесс часто меняется. Коллаборативные роботы изменили это, потому что их легко преобразовать и они могут обучаться новым операциям.
Упаковочная промышленность
В упаковочной промышленности растет спрос на меньшие серии и большую индивидуализацию. Коботы отлично на это реагируют. Задачи, которые может выполнять кобот, — это простые задачи по упаковке, например, размещение продуктов в коробках. Кроме того, коботы идеально подходят для укладки коробок на поддоны. Задачи в упаковочной промышленности часто физически сложны и повторяются. Избавляя сотрудников от них, производительность повышается, и сотрудники становятся счастливее на своей работе.
Электронная промышленность
Электронная промышленность часто работает с небольшими изделиями, с которыми нужно обращаться осторожно. Коллаборативные роботы оснащены различными датчиками, что делает их как бы «чувствительными роботами». Поэтому они чрезвычайно подходят для работы с такими продуктами. Таким образом, коботы можно использовать для автоматизации процесса тестирования или контроля качества.
Фармацевтическая промышленность
Фармацевтическая промышленность часто работает с большими количествами, и хороший контроль имеет большое значение. Также важно, чтобы погрешность была как можно меньше. Такие характеристики делают эту отрасль идеальной для автоматизации. Чем больше объем производства, тем выгоднее его автоматизировать. А поскольку роботы выполняют одни и те же операции часто и точно, вероятность ошибок сводится к минимуму.
Автомобильная промышленность
В течение многих лет автомобильная промышленность выигрывала от автоматизации с помощью роботов. Большие промышленные роботы уже много лет используются для сборки автомобилей. Такие разработки, как небольшие серии и растущий спрос на персонализацию, означают, что коллаборативные роботы также стали интересны для этой отрасли.
Металлургическая промышленность
Кроме того, в металлургической промышленности все большее распространение получает мелкосерийное производство с большим ассортиментом. Большой ассортимент товаров в небольшом количестве. Этот тип производственной среды идеально подходит для коллаборативных роботов, потому что коботы могут быть быстро преобразованы, когда этого требует производство. Задачи, которые коботы могут выполнять в металлургической промышленности, включают сварку, пайку или загрузку станков с ЧПУ и листогибочных прессов.
Всего комментариев: 0