Шаговые роботы: Статьи компании Purelogic R&D
Содержание
Шаговые двигатели — «Robot-Kit.ru»
Шаговый двигатель 28BYJ-48-5V
Артикул: RKP-28BYJ-48-5V
Шаговый двигатель с редуктором 4 фазы, 64 шага
В наличии
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-42J1840-408
Крутящий момент 4 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:0.8 АСопротивление/фаза:7.5 ОмИндуктивность/фаза:10 мГн
В наличии
1 000 ₽
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-JK42HS40-1704
Крутящий момент 4 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.7 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:3.2 мГн
В наличии
1 300 ₽
Шаговый двигатель Nema17 1.8° 60 мм
Артикул: Nema17-60mm-6kg
Крутящий момент 6 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.5 АУдерживающий момент:6.0 кг*смДлина корпуса:60 мм
В наличии
2 520 ₽
Шаговый двигатель Nema23 1.8° 56 мм
Артикул: Nema23-56mm-12kg-6
Крутящий момент 12 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3. 3 BУгловой шаг:1.8°Номинальный ток/фаза:2.5 АСопротивление/фаза:1.6 Ом
3 BУгловой шаг:1.8°Номинальный ток/фаза:2.5 АСопротивление/фаза:1.6 Ом
В наличии
3 500 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 50 мм
Артикул: Nema23-50mm-DS-8
С 2 валами, ток 1.0 А, крутящий момент 8.6 кг*см, вал 8 мм
Тип двигателя:гибридныйНоминальное напряжение:6.0 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:6.0 Ом
В наличии
3 080 ₽
Шаговый двигатель Nema34 1.8° 150 мм
Артикул: Nema34-150mm-130kg
Крутящий момент 130 кг*см
Тип двигателя:гибридныйНоминальное напряжение:7.2 ВУгловой шаг:1.8°Номинальный ток/фаза:4 АСопротивление/фаза:1.0 Ом
В наличии
12 000 ₽
Держатель для шагового двигателя NEMA 17 под экструдеры BMG/Titan Aero
Артикул: RKP-MB42-BMG
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Демпфер для шагового двигателя NEMA 17
Артикул: MM-Anti-Vibro-NEMA17
В наличии
1 050 ₽
Радиатор охлаждения экструдера MK7/MK8, черный
Артикул: HeatSink-40x40x11-B
Радиатор охлаждения шагового двигателя NEMA 17
В наличии
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42Al-Flat
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42A
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Шаговый двигатель Nema14 1.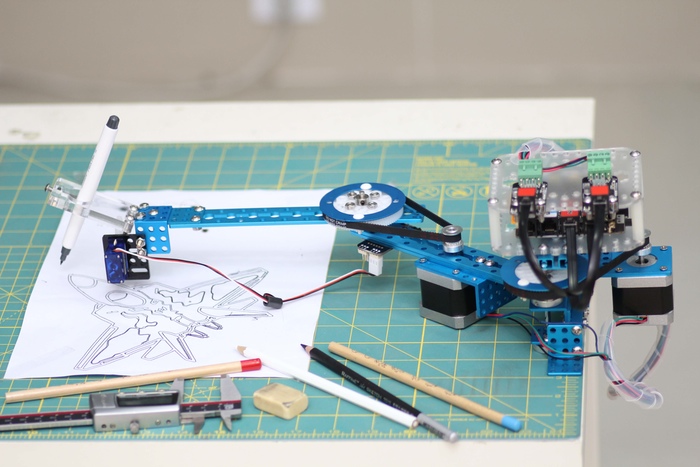 8° 34 мм
8° 34 мм
Артикул: Nema14-14HY0007-20
Крутящий момент 0.91 кг*см
Тип двигателя:гибридныйНоминальное напряжение:2.3 ВУгловой шаг:1.8°Номинальный ток/фаза:1.25 АСопротивление/фаза:1.86 Ом
Под заказ
1 330 ₽
Шаговый двигатель Nema14 1.8° 34 мм
Артикул: Nema14-14HY3408
Крутящий момент 1.83 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12 ВУгловой шаг:1.8°Номинальный ток/фаза:0.8 АСопротивление/фаза:6.5 Ом
Под заказ
Шаговый двигатель Nema16 1.8° 38 мм
Артикул: Nema16-FL39ST38-0504A
Крутящий момент 2.9 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12 ВУгловой шаг:1.8°Номинальный ток/фаза:0.5 АСопротивление/фаза:24 Ом
Под заказ
Шаговый двигатель Nema17 1.8° 34 мм
Артикул: Nema17-17HS1011-20B
Крутящий момент 3.2 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.2 АСопротивление/фаза:3.2 ОмУдерживающий момент:3.2 кг*см
Под заказ
1 400 ₽
Шаговый двигатель Nema17 1. 8° 40 мм
8° 40 мм
Артикул: Nema17-17HS4401S
Крутящий момент 4.2 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3.6 ВУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.4 Ом
Под заказ
1 600 ₽
Шаговый двигатель Nema17 0.9° 48 мм
Артикул: Nema17-17HD48002H-22B
Крутящий момент 4.4 кг*см
Тип двигателя:гибридныйУгловой шаг:0.9°Номинальный ток/фаза:1.68 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:4.1 мГн
Под заказ
1 500 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 40 мм
Артикул: Nema17-40mm-DS
С 2 валами, ток 1.5 А, крутящий момент 4.5 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:3.3 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.2 Ом
Под заказ
1 820 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 60 мм
Артикул: Nema17-60mm-DS
С 2 валами, ток 1.5 А, крутящий момент 6 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:2.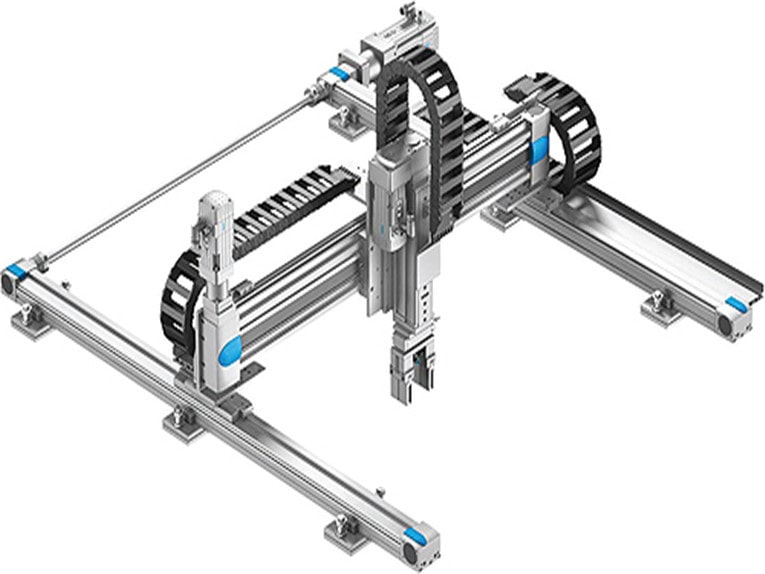 7 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:1.8 Ом
7 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:1.8 Ом
Под заказ
2 380 ₽
Шаговый двигатель Nema17 1.8° с винтом T8 295 мм и гайкой
Артикул: Nema17-42HS40-1004YAL
Система линейного перемещения в сборе.
Тип двигателя:гибридныйНоминальное напряжение:3.9 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:3.9 Ом
Под заказ
3 500 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 76 мм
Артикул: Nema23-76mm-DS-8
С 2 валами, ток 2.5 А, крутящий момент 17.5 кг*см, вал 8 мм
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:2.5 АУдерживающий момент:17.5 кг*смДлина корпуса:76 мм
Под заказ
4 100 ₽
Радиатор охлаждения шагового двигателя NEMA 17
Артикул: HeatSink-40x40x11.3-B
Радиатор охлаждения 40 x 40 x 11.3 мм
Под заказ
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42S-A
Держатель стальной для шагового двигателя 42 серии
Под заказ
Держатель для шагового двигателя NEMA 23
Артикул: RKP-MB57S
Держатель стальной для шагового двигателя 57 серии
Под заказ
Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1. 8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0. 9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Категория продуктов для робототехники и ЧПУ, шаговых двигателей на Adafruit Industries
Код продукта: 858
Это отличный первый шаговый двигатель, подходящий для небольших проектов и экспериментов с шаговыми двигателями. Этот униполярный двигатель имеет встроенную монтажную пластину с двумя монтажными отверстиями. На один оборот приходится всего 32 шага (11,25 градуса), а внутри находится редуктор 1/16. (На самом деле это 1/16,128, но для большинства целей 1/16 является достаточно хорошим приближением) Это означает…
Код продукта: 2448
Вращайте два двигателя постоянного тока, включайте один биполярный или однополярный шаговый двигатель или запускайте два соленоида с током 1,2 А на канал с помощью TB6612. Возможно, они более известны как «драйверы в нашей сборке Adafruit Motorshield или Motor HAT». Нам очень нравятся эти двойные H-мосты, поэтому, если вы хотите управлять двигателями без экрана или HAT, их легко включить в любой непаянный…
Возможно, они более известны как «драйверы в нашей сборке Adafruit Motorshield или Motor HAT». Нам очень нравятся эти двойные H-мосты, поэтому, если вы хотите управлять двигателями без экрана или HAT, их легко включить в любой непаянный…
Код продукта: 3297
Вращайте два двигателя постоянного тока или шагайте один биполярный или однополярный шаговый двигатель с током до 1,2 А на канал с помощью DRV8833. Этот чип драйвера двигателя является хорошей альтернативой драйверу TB6612. Как и этот чип, вы получаете 2 полных Н-моста, но этот чип лучше подходит для использования с низким напряжением (может работать от 2,7 В до 10,8 В мощности двигателя) и имеет встроенную возможность ограничения тока. Мы настроили его на…
Код продукта: 324
Шаговый двигатель, который удовлетворит все ваши потребности в робототехнике! Этот 4-проводной биполярный степпер имеет шаг 1,8° для плавного движения и хорошего удерживающего момента. Максимальный ток двигателя был указан 350 мА, чтобы его можно было легко приводить в действие с помощью моторного щита Adafruit для Arduino (или другого драйвера двигателя) и настенного адаптера или свинцово-кислотного аккумулятора. Некоторые приятные детали включают…
Некоторые приятные детали включают…
Код продукта: 2348
Пусть ваши мечты о роботах сбудутся с новым DC+Stepper Motor HAT от Adafruit. Это дополнение Raspberry Pi идеально подходит для любого проекта движения, поскольку оно может управлять до 4 двигателей постоянного тока или 2 шаговыми двигателями с полным управлением скоростью PWM. Raspberry Pi и моторы в комплект не входят. Работает со всеми без исключения компьютерами Raspberry Pi с портом подключения 2×20. Поскольку у Raspberry Pi нет…
Код продукта: 2927
Перьевая доска без амбиций — это перьевая доска без FeatherWings! Это двигатель постоянного тока + шаговый двигатель FeatherWing, который позволит вам использовать 2 биполярных шаговых двигателя или 4 коллекторных двигателя постоянного тока (или 1 шаговый двигатель и 2 двигателя постоянного тока). Используя наши заголовки Feather Stacking Headers или Feather Female Headers, вы можете подключить FeatherWing сверху или снизу вашей доски Feather и позволить. ..
..
Код продукта: 3093
Иногда мы задаемся вопросом, смотрят ли когда-нибудь инженеры-робототехники фильмы. Если бы они это сделали, то знали бы, что превращение роботов в слуг всегда заканчивается бунтом роботов. Зачем вообще идти по этому пути? Здесь, в Adafruit, мы верим в то, что роботы станут нашими друзьями! Так что, если вам нужен компаньон, подумайте о роботе. Их весело программировать, и вы можете проявить творческий подход с…
Код продукта: 918
Это отличный первый шаговый двигатель, подходящий для небольших проектов и экспериментов с шаговыми двигателями. Этот униполярный двигатель имеет встроенную монтажную пластину с двумя монтажными отверстиями. Всего 32 ступени (11,25 градуса) на оборот, а внутри редуктор 1/16. (На самом деле это 1/16,128, но для большинства целей 1/16 является достаточно хорошим приближением) Это означает…
Код продукта: 2424
Этот шаговый двигатель немного отличается от больших типов NEMA-17, к которым вы, возможно, привыкли. Они часто используются в датчиках для мотоциклов и автомобилей, чтобы заменить полностью аналоговые датчики старого образца. Они имеют чрезвычайно высокую точность шага около 1/2 градуса на шаг, 600 шагов для одного шага, быстрый отклик для быстрых движений и диапазон ~ 315 ° градусов. Их…
Они часто используются в датчиках для мотоциклов и автомобилей, чтобы заменить полностью аналоговые датчики старого образца. Они имеют чрезвычайно высокую точность шага около 1/2 градуса на шаг, 600 шагов для одного шага, быстрый отклик для быстрых движений и диапазон ~ 315 ° градусов. Их…
Код продукта: 1176
Соедините это с этим с помощью соединителя с установочным винтом. Эти муфты изготовлены из обработанного алюминия и имеют спиральный разрез, который делает их слегка гибкими, поэтому их можно устанавливать на два вала, даже если они не являются идеально коллинеарными, что помогает уменьшить эффект заедания. Из-за того, что они вырезаны, они немного пружинят по линейным осям X Y и Z, но не по оси вращения….
Product ID: 3928
Иногда мы задаемся вопросом, смотрят ли когда-нибудь инженеры-робототехники фильмы. Если бы они это сделали, то знали бы, что превращение роботов в слуг всегда заканчивается бунтом роботов. Зачем вообще идти по этому пути? Здесь, в Adafruit, мы верим в то, что роботы станут нашими друзьями! Так что, если вам нужен компаньон, подумайте о роботе. Их весело программировать, и вы можете проявить творческий подход с…
Их весело программировать, и вы можете проявить творческий подход с…
Код продукта: 4280
Пусть ваши мечты о роботах сбудутся с новым капотом DC+Stepper Motor от Adafruit. Это дополнение Raspberry Pi идеально подходит для любого проекта движения, поскольку оно может управлять до 4 двигателей постоянного тока или 2 шаговыми двигателями с полным управлением скоростью PWM. По сути, мы взяли наш суперпопулярный HAT с двигателем постоянного тока и шагового двигателя, сжали его и полностью собрали — подключи и работай, готовый к работе, без пайки…
Код продукта: 1297
У вас есть шаговый двигатель, но вам нужно подключить его к вашему проекту ЧПУ, не так ли? Не так просто, если у вас нет крепления для шагового двигателя, как здесь! Это крепление подходит для любого двигателя NEMA-17 (с расстоянием между отверстиями 31 мм) с четырьмя винтами. Есть два слота длиной 30 мм, расположенные на расстоянии 30 мм друг от друга, поэтому вы можете легко прикрепить его. Изготовлен из стали со сварным 9опорные треугольники с углом 0 градусов, его…
Изготовлен из стали со сварным 9опорные треугольники с углом 0 градусов, его…
Product ID: 3957
Иногда мы задаемся вопросом, смотрят ли когда-нибудь инженеры-робототехники фильмы. Если бы они это сделали, то знали бы, что превращение роботов в слуг всегда заканчивается бунтом роботов. Зачем вообще идти по этому пути? Здесь, в Adafruit, мы верим в то, что роботы станут нашими друзьями! Так что, если вам нужен компаньон, подумайте о роботе. Их весело программировать, и вы можете проявить творческий подход с…
Код продукта: 1251
Для точного управления движением ремни и шкивы GT2 обеспечивают превосходную точность по отличной цене. Этот шкив предназначен для использования только с ремнями GT2 шириной 6 мм — ремни MXL будут проскальзывать из-за другого профиля зубьев. Этот шкив имеет 20 зубьев и внутренний диаметр 5 мм. Два установочных винта можно использовать для надежного крепления к любому валу диаметром 5 мм, например к одному из наших шаговых двигателей. …
…
Код продукта: 1253
Для точного управления движением ремни и шкивы GT2 обеспечивают превосходную точность по отличной цене. Этот шкив предназначен для использования только с ремнями GT2 шириной 6 мм — ремни MXL будут проскальзывать из-за другого профиля зубьев. Этот шкив имеет 36 зубьев и внутренний диаметр 5 мм. Два установочных винта можно использовать для надежного крепления к любому валу диаметром 5 мм, например, к нашим шаговым двигателям. Полный…
Код продукта: 5117
Эти шаговые двигатели размера NEMA-23 поставляются нам компанией X-Carve. Они используются для изготовления станков с ЧПУ, поэтому они очень прочные, быстрые и надежные. В X-Carve они управляют тремя осями на своем фрезерном станке и имеют предварительно прикрепленные шкивы (см. техническое описание для спецификации шкивов). Для проводки предусмотрен жгут проводов с защелкой Этот 4-проводной биполярный шаговый двигатель имеет…
Код продукта: 1252
Для точного управления движением ремни и шкивы GT2 обеспечивают превосходную точность по отличной цене. Этот шкив предназначен для использования только с ремнями GT2 шириной 6 мм — ремни MXL будут проскальзывать из-за другого профиля зубьев. Этот шкив имеет 20 зубьев и внутренний диаметр 8 мм. Два установочных винта можно использовать, чтобы прочно прикрепить его к любому валу диаметром 8 мм. Полностью алюминиевая конструкция означает…
Этот шкив предназначен для использования только с ремнями GT2 шириной 6 мм — ремни MXL будут проскальзывать из-за другого профиля зубьев. Этот шкив имеет 20 зубьев и внутренний диаметр 8 мм. Два установочных винта можно использовать, чтобы прочно прикрепить его к любому валу диаметром 8 мм. Полностью алюминиевая конструкция означает…
Код продукта: 2653
Получите свою частицу (ранее известную как Искра) Фотон движется с помощью щита PhoBot Robotics. Нет, это не робот, который готовит вам тарелку вкусного вьетнамского супа. Вместо этого, это плата от Саймона Монка, что-то вроде Motorshield для вашего Spark Core или Particle Photon, которая упрощает управление маленькими роботами! Плата оснащена двунаправленным управлением двигателем…
Код продукта: 1438
Оригинальный комплект Adafruit Motorshield — один из наших самых любимых наборов, поэтому мы решили сделать его еще лучше. Мы обновили комплект защиты, чтобы обеспечить лучший и самый простой способ управления двигателями постоянного тока и шаговыми двигателями. Этот щит ускорит работу над вашим следующим проектом по робототехнике! Мы сохранили возможность управлять 4 двигателями постоянного тока или 2 шаговыми двигателями, но добавили много…
Этот щит ускорит работу над вашим следующим проектом по робототехнике! Мы сохранили возможность управлять 4 двигателями постоянного тока или 2 шаговыми двигателями, но добавили много…
Сообщите мне, Adafruit Motor/Stepper/Servo Shield для Arduino v2 Kit — v2.3
Код продукта: 4411
Этот крошечный шаговый двигатель имеет такое же качество и размер шага, как и большой NEMA-17, который у нас есть, но настолько симпатичный, что будет работать с компактными сборками с ЧПУ. Этот 4-проводной биполярный степпер имеет шаг 1,8° для плавного движения и хорошего удерживающего момента. Максимальный ток двигателя должен составлять 600 мА, чтобы его можно было легко приводить в действие с помощью моторного шилда Adafruit для Arduino,…
Сообщите мне, Мини-шаговый двигатель — 200 шагов — размер 20×30 мм NEMA-8
Код продукта: 1749
Проект TinyG представляет собой высокопроизводительный 6-осевой контроллер ЧПУ на базе USB, который поддерживает линейные оси XYZ и круговые оси ABC с 4 выходами двигателя. Он предназначен для небольших приложений с ЧПУ и других приложений, требующих точного управления движением. TinyG задуман как комплексное встроенное решение для управления малыми и средними двигателями. Основные характеристики: Полный,…
Он предназначен для небольших приложений с ЧПУ и других приложений, требующих точного управления движением. TinyG задуман как комплексное встроенное решение для управления малыми и средними двигателями. Основные характеристики: Полный,…
Сообщите мне, плата контроллера TinyG CNC v8
Код продукта: 1750
Создайте свой собственный 3-осевой станок с ЧПУ, управляемый Arduino, с помощью gShield. gShield для Arduino (ранее известный как grblShield) — это полное аппаратное решение для системы управления движением с ЧПУ Dank под названием grbl. gShield совместим с Uno и другими версиями платформы разработки Arduino 328p. Версия 5 теперь совместима с запуском TinyG на…
Сообщите мне, Synthetos gShield (grblShield) V5
Код продукта: 807
Запустите четыре соленоида, два двигателя постоянного тока или один биполярный или однополярный шаговый двигатель с током до 600 мА на канал с помощью L29.3D. Возможно, они более известны как «водители нашего Adafruit Motorshield». Если вы случайно повредили драйверы в шилде, вы можете использовать одного из этих щенков для его замены. Или вы можете макетировать что-то самостоятельно! Каждый чип содержит два полных…
Если вы случайно повредили драйверы в шилде, вы можете использовать одного из этих щенков для его замены. Или вы можете макетировать что-то самостоятельно! Каждый чип содержит два полных…
Уведомить меня, драйвер двигателя с двойным Н-мостом для постоянного тока или шаговых двигателей — 600 мА — L293D
Шаговые двигатели и серводвигатели
РАЗМЕЩЕН 19.07.2022
В прошлом мы наблюдали появление шаговых двигателей — небольших, компактных двигателей, которые использовали низкие скорости при более высоком крутящем моменте для меньшей грузоподъемности. В настоящее время серводвигатели управляют промышленным миром благодаря их высокой скорости, большой грузоподъемности и лучшему позиционному контролю.
Таким образом, выбор между шаговым двигателем и серводвигателем так же сбивает с толку, как и понимание их работы. Хорошо, что мы вас охватили, так как в следующем руководстве рассказывается о шаговых двигателях и серводвигателях!
Оставайтесь с нами до конца, чтобы узнать больше о том, как работают шаговые и серводвигатели, их преимуществах и недостатках, сравнительную таблицу и руководство по выбору правильного типа двигателя в соответствии с потребностями вашего робота! В конце мы также включим некоторые общие часто задаваемые вопросы, чтобы помочь вам с вашим решением!
Ниже приводится краткий обзор шаговых и серводвигателей, включая их преимущества и недостатки.
Как работает шаговый двигатель?
Работа шагового двигателя осуществляется системой с разомкнутым контуром, которая питается от переменного тока и заставляет двигатель «шагать» через определенное количество интервалов. Результирующее движение затем создает предварительно запрограммированное вращательное движение и позиционирование.
Основными частями шагового двигателя являются ротор, магнит и статор. Другие части включают переднюю и заднюю торцевые крышки, обмотку, шариковый подшипник и вал.
Статор, воздействуя на ротор, создает магнитную силу, определяющую вращательное движение и статическое положение двигателя. Постоянный магнит также играет свою роль в вращении ротора двигателя с дискретными интервалами. Это позволяет двигателю нести нагрузку, что делает их подходящими для приложений, требующих хорошего положения и нагрузки.
Преимущество шагового двигателя заключается в его простой конструкции и простоте эксплуатации. Двигатель также имеет хороший крутящий момент на низких оборотах, что облегчает буксировку с места, так как большая мощность генерируется с высоким крутящим моментом.
Поскольку высокий крутящий момент на низкой скорости приводит к плавной работе двигателя, двигатель может получать своевременные команды, и его движение соответственно синхронизируется. Эта функция делает шаговые двигатели лучшим выбором, чем серводвигатели, в которых поступающие команды задерживают движение.
Однако при использовании в длинных перемещениях одинаковая скорость вращения является недостатком шаговых двигателей. Он ограничивает рабочий цикл и удерживает двигатель от достижения пикового значения крутящего момента.
Тем не менее, шаговые двигатели имеют другие особенности по сравнению с серводвигателями, включая быструю реакцию при запуске. Низкоскоростный крутящий момент приводит к хорошему низкоскоростному рабочему процессу, и эта функция не требует предварительной настройки.
Компактный размер двигателя также позволяет машине экономить больше энергии благодаря простой и легкой конструкции. Уменьшение собственного веса двигателя дополнительно влияет на общую стоимость, делая шаговые двигатели намного дешевле, чем серводвигатели.
Всего комментариев: 0