Промышленные роботы примеры: Какими бывают промышленные роботы? Шесть основных типов.
Содержание
Какими бывают промышленные роботы? Шесть основных типов.
Содержание:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.

Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот
Kawasaki-Unimate 2000 выпущенный в 1969 году
Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.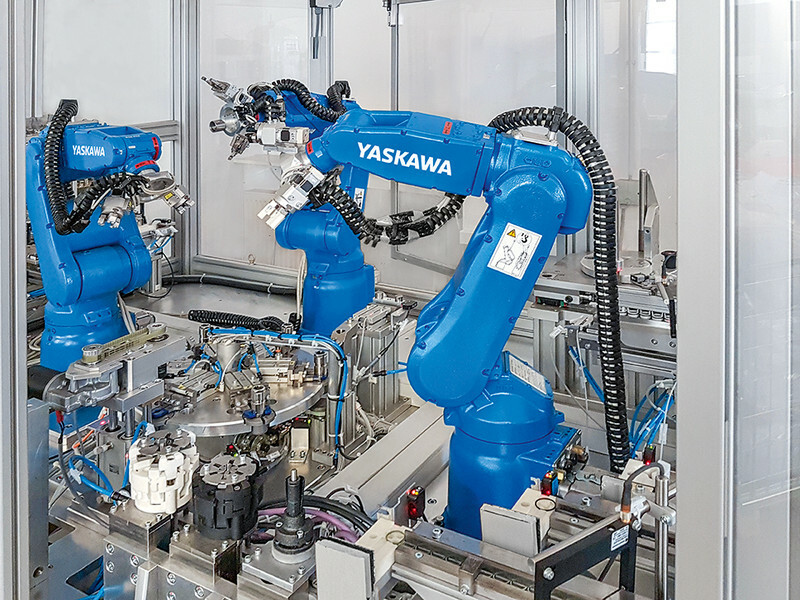
На фото робот Kawasaki TL420
для работы с жидкокристаллической стеклянной подложкой.
Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
Линейный робот (Декартов робот) (Cartesian robot)
.
Простой в управлении.
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
На фото универсальный робот Kawasaki CX210L
с грузоподъемностью 210 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
Сборщик
На фото двурукий робот Kawasaki duAro1
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами.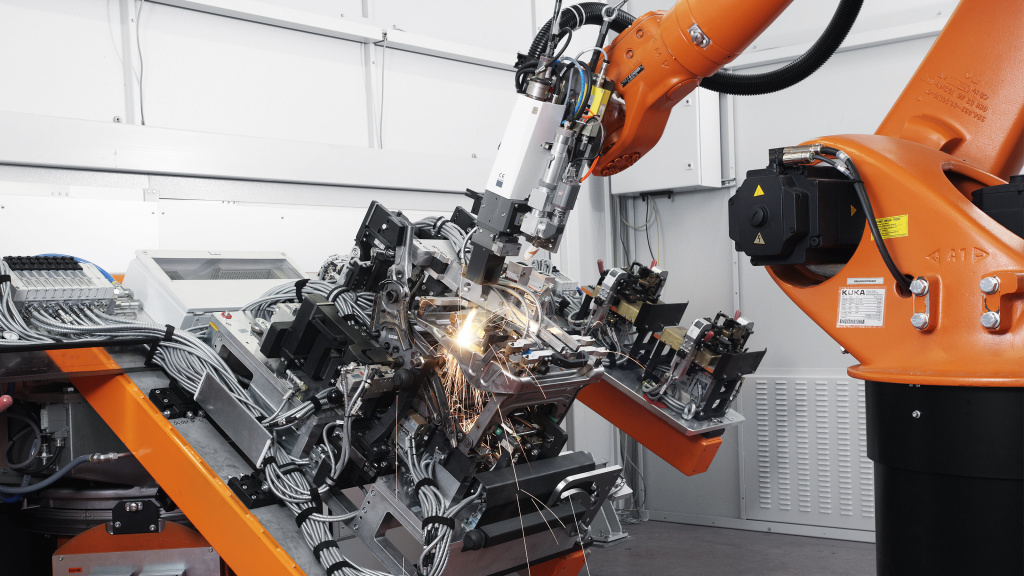 В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
Если вы хотите обсудить, какой тип роботов лучше всего подходит для вашей конкретной задачи, свяжитесь с нами по телефону 8(812)209-11-03 или по адресу [email protected]
Навигация по статье:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
виды промышленной робототехники в производстве – примеры применения
Содержание:
- Что представляет собой промышленная робототехника
- Что называют промышленными роботами
- Виды промышленных роботов
- Типы промышленных роботов по назначению
- Перспективы применения
- Основные преимущества использования промышленных роботов
- Производители промышленных роботов
- Fanuc
- Hanwha
- Kuka
- Universal Robots
- uFactory
- ABB
- Yaskawa
- Kawasaki
- Автомобильная промышленность
- Производство электроники
- Пищевая промышленность
- Сельское хозяйство
Автоматизация давно является неотъемлемой частью современного производства. Робототехника становится дешевле. В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
Робототехника становится дешевле. В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
Каталог промышленных роботов
Что представляет собой промышленная робототехника
Это отрасль современного производства, которая занимается разработкой и производством промышленных роботов-манипуляторов и систем, направленных на автоматизацию производственных процессов и замену ручного труда механическим.
Первый промышленный робот Unimate был выпущен в Америке в 1954 году. Его изобрел основатель фирмы Unimation Джордж Девол. В 1961 году робот был запущен в массовое производство на предприятии General Motors. В 70-80-е годы 20 века робототехника продолжала развиваться дальше.
Что называют промышленными роботами
Промышленные роботы (ПР) представляют собой устройства, работающие по заданной программе и осуществляющие движение, перемещение и управление в рамках производственного процесса. Их назначение – выполнение определенных операций и/или перемещение предметов под контролем оператора или без его участия.
Их назначение – выполнение определенных операций и/или перемещение предметов под контролем оператора или без его участия.
Виды промышленных роботов
Специалисты выделяют три основных вида промышленных роботов.
- Автоматические.
- Программные роботы – работают на основе циклической программы, которая заранее вводится в блок памяти. Это самые простые и дешевые представители автоматических роботизированных устройств.
- Адаптивные – благодаря встроенной системе датчиков и сенсоров могут переключать программу с учетом изменения внешних условий.
- Обучаемые – управляющая программа корректируется в зависимости от хода технологического процесса. Затем робот функционирует с учетом внесенных изменений.
- Интеллектуальные – последнее поколение устройств. Они имеют элементы искусственного интеллекта, поэтому могут сами анализировать окружающую среду и действовать с учетом полученных сведений.
- Манипуляторы или командные роботы. Управляются оператором дистанционно.
- Копирующие. Повторяют действия оператора.
- Полуавтоматические. Оператор задает движение основному органу, работа сочленений согласуется и корректируется системой управления.
- Автоматизированные. Автоматический режим работы чередуется с работой оператора.
- Супервизорные. Автоматически выполняют заданный цикл, но переход от одного этапа работы к другому осуществляется через команды оператора.
- Диалоговые. Работая в автоматическом режиме, в то же время взаимодействуют с оператором с помощью специального языка (например, голосовые команды).
По грузоподъемности:
- Легкие – до 10 кг.
- Средние – 11-200 кг.
- Тяжелые – 200 кг – 1 т.
- Сверхтяжелые – более 1 т.
По маневренности:
- Стационарные.
- Подвижные.
По способу установки:
- Встроенные.

- Подвесные.
- Напольные.
Промышленного робота выбирают в зависимости от условий его эксплуатации и от задач, которые ставит перед собой производитель.
Типы промышленных роботов по назначению
По назначению роботы условно делятся на несколько категорий.
Универсальные, то есть выполняющие различные виды операций.
Специальные. Они работают даже в неблагоприятных условиях или имеют особые функции.
Специализированные. Такие роботы предназначены для осуществления какого-либо одного вида деятельности: сборка, резка, сварка, покраска, паллетирование и пр. Рассмотрим некоторые из них.
- Роботы для паллетирования. Они используются для погрузочно-разгрузочных работ и укладки изделий в паллеты по определенным схемам. Это, например, роботы Fanuc серии M410 (работа со средними и тяжелыми грузами). Сюда же можно отнести KUKA KR QUANTEC PA Arctic – паллетоукладчик, работающий даже при минус 30 градусах.

- Роботы для сварки. К примеру, аппараты серии FANUC Arc Mate умеют паять и выполнять все виды сварки.
- Роботы для покраски. Они оснащаются распыляющими устройствами и успешно работают с лакокрасочными покрытиями разных типов (FANUC Paint).
Роботы-манипуляторы.
- Традиционные. Это своеобразные робо-руки, работающие на сервоприводах. Движения ограничиваются размерами самой руки и инструмента, который закрепляется на ней. Они поворачиваются и совершают сложные движения по разнообразным траекториям. К ним относятся пневмоприсоски, захваты, распылители краски, роботы для 3D-печати, сварки.
- Дельта-роботы. Совершают быстрые и точные движения, поэтому служат для выполнения фасовочных и монтажных работ в фармацевтике, электронной и пищевой промышленности.
- Роботы типа SCARA. Их особенность: высокая точность и повторяемость, наряду с меньшей областью работы и степенью свободы. Соответственно, используются в производствах, где важна точность, а не большая зона доступа (комплектация изделий и пр.
 ).
).
Роботы для обслуживания станков. Их основные функции – выемка деталей из станков с ЧПУ, загрузка материала, техническое обслуживание: замена инструментов, смазка. Могут обслуживать несколько станков.
Коллаборативные роботы (коботы). Работают вместе с людьми, и полностью безопасны для них. Легко настраиваются на разные виды работ, их можно быстро обучить выполнять новые задачи. На данный момент считаются лучшими промышленными роботами.
Каталог коллаборативных роботов
Перспективы применения
Как было сказано выше, робототехника становится все более и более дешевой и доступной, поскольку:
- Один робот заменяет несколько десятков человек.
- Он вырабатывает больше продукции.
- Окупает себя примерно за 12-15 лет.
Развитие этой отрасли идет по пути разработки искусственного интеллекта. Наиболее перспективные отрасли развития робототехники в России – это:
- Строительство.

- Обрабатывающая промышленность.
- Горнодобывающая промышленность.
- Сельское хозяйство.
Основные преимущества использования промышленных роботов
Эти устройства уже доказали свою эффективность. Благодаря им:
- Снижаются затраты, в том числе и на рабочую силу.
- Повышается точность изготовления.
- Уменьшается количество брака.
- Ускоряются производственные процессы.
- Экономится материал и электроэнергия.
- Снижается стоимость обработки.
- Ускоряется процесс перехода на другой проект.
Производители промышленных роботов
При покупке промышленного робота имеет смысл поинтересоваться его производителем. Можно выделить несколько компаний, известных во всем мире.
Fanuc
Каталог роботов Fanuc
Японская компания Fanuc – мировой лидер по производству промышленных роботов. По данным на 2018 год по всему миру было установлено 400 000 роботов производства Fanuc. В ассортимент входят различные типа устройств: роботы для сварки, покраски, паллетирования, дельта-роботы.
В ассортимент входят различные типа устройств: роботы для сварки, покраски, паллетирования, дельта-роботы.
В частности, разработанная компанией модель FANUC M-1iA отлично подходит для предприятий, занимающихся небольшими электронными устройствами. Ее основные характеристики: высокая точность, небольшая грузоподъемность, повышенная производительность, быстрая сборка деталей.
Hanwha
Hanwha – известный производитель коллаборативных роботов. Продукция этой южнокорейской фирмы используется в Азии, Европе и США. Кобаты (коллаборативные роботы) становятся все популярнее, т.к. они дешевле в обслуживании и просты в управлении.
Наибольшим спросом пользуется Hanwha HCR-5 cobot. Он применяется для изготовления электронных устройств, при обработке пластика, в пищевой, автомобильной и фармацевтической промышленности.
Kuka
Kuka выпускает промышленных роботов, выполняющих многосерийные задачи: паллетирование, погрузку, упаковку, сварку, сборку, обработку. Более 80 тыс. роботов от этого производителя установлены по всему миру.
Более 80 тыс. роботов от этого производителя установлены по всему миру.
Например, роботы Kuka, выполняющие автоматическую дуговую сварку, используются на заводе Gestamp в Билефельде при производстве рам лестничного типа для автомобилей Volkswagen. Они обеспечивают надежность и высокую производительность.
Universal Robots
Universal Robots основана в 2005 году. Она производит гибких коллаборативных роботов небольшого размера. Первая модель — UR5 – была выпущена в 2008 году. Кобаты Universal Robots используются при сборке, паллетизации, упаковке, покраске, литье, сварке. Они совместимы со станками с ЧПУ.
К примеру, модель UR 10 со средней грузоподъемностью применяется при сварке, склейке, пайке деталей, совмещается с фармацевтическим, сельскохозяйственным и технологическим оборудованием. Может размещаться на столе.
uFactory
uFactory – китайский производитель, специализирующийся на выпуске настольных роботов для малого бизнеса и обучения.
Одна из последних разработок компании — uArm Swift Pro. Эта роботизированная рука предназначена для бытовых целей, в частности, для 3D-печати. На нее можно установить лазерный гравер, головки для печати, различные захваты. При необходимости аппарат легко перевести в обучающий режим.
ABB
ABB – швейцарская фирма, которая выпустила на сегодняшний день более 160 тысяч роботов. Они используются в пищевых и мебельных производствах, в фармакологии, электронике и пр.
Фирма АВВ – пионер на рынке робототехники. Именно она 40 лет назад произвела первого в мире электрического промышленного робота и первого в мире робота для покраски.
В России задействованы около 1,5 тыс. роботов этой фирмы. Например, они осуществляют контроль качества на предприятиях компании Novo Nordisk (Калужская область), автоматизируют производственные процессы завода «МолПродукт» (Московская область) и т.д.
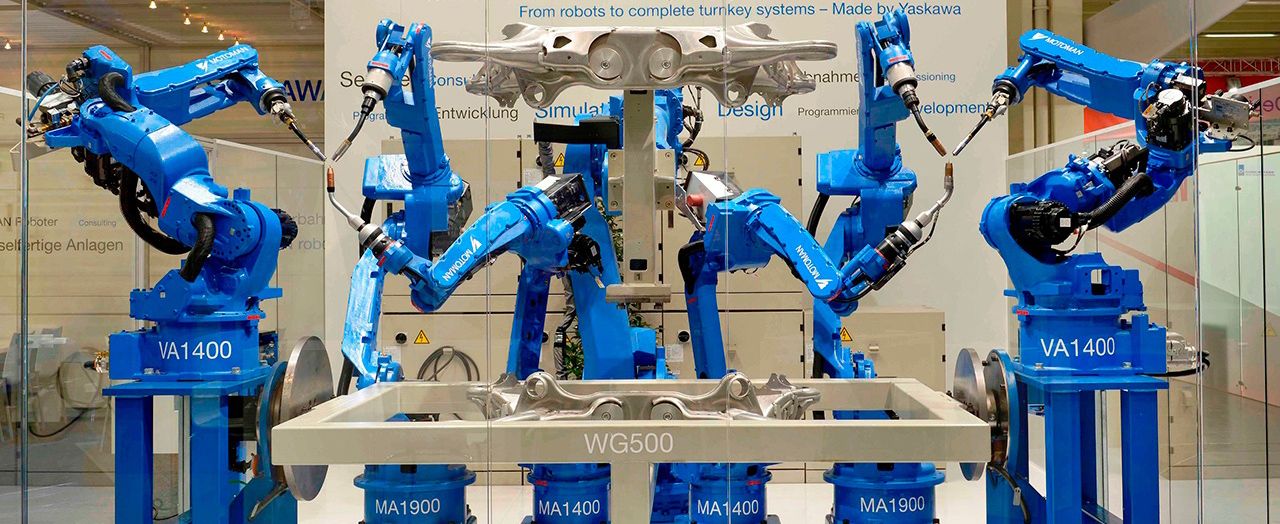
Yaskawa
Эта одна из старейших японских фирм основана в 1915 году. В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 2007 компанией Yaskawa разработан самый быстрый робот для дуговой сварки — МОТОМАN SSA2000.
Kawasaki
Компания работает на рынке робототехники с 1969 года. Она специализируется на выпуске роботов для покраски, паллетирования, сварки. Высоко ценятся среди покупателей роботы для чистых помещений, двурукие, шарнирные. Они также подходят для работы в сложных условиях (агрессивные среды, высокие температуры).
Проблемы промышленных роботов и их решение
Основные проблемы среднего и малого бизнеса, ведущие к отказу от использования промышленных роботов:
- небольшой объем заказов;
- отсутствие узких специалистов, владеющих навыками программирования, или повышенная оплата за их труд;
- невозможность автоматизации каких-либо задач из-за отсутствия крупных серий;
- нехватка места в цеху или другом помещении.

Все эти вопросы легко решаются при помощи роботов нового поколения – коботов. Они:
- Могут работать с мелкими сериями или даже производить единичную продукцию.
- Имеют открытую архитектуру – это значительно увеличивает их потенциал.
- Быстро переключаются между операциями.
- Легко перенастраиваются на другие задачи.
- Безопасны, т.к. оснащены специальными датчиками, которые предотвращают столкновение с человеком.
- Не требуют много места или специального ограждения.
Применение промышленных роботов в различных отраслях промышленности
Промышленные роботы особенно активно применяются в тех отраслях промышленности, где необходима точность и быстрота действий. Они успешно заменяют людей при выполнении опасных или монотонных операций или при работе в агрессивных средах.
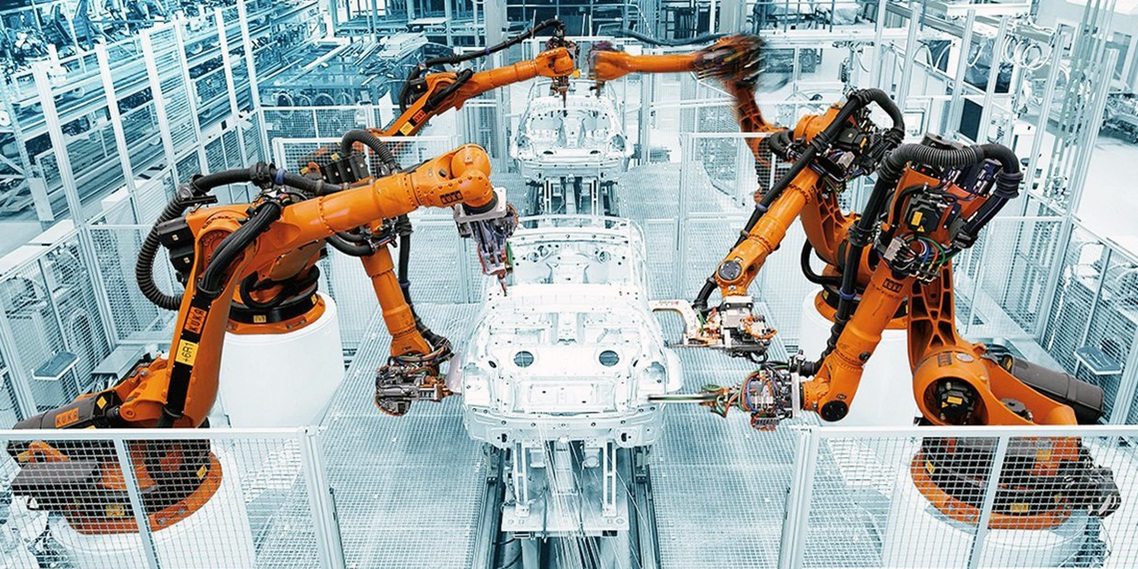
Автомобильная промышленность
На сегодняшний день это лидер по внедрению робототехники в производственные процессы. Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Производство электроники
Компания ALNEA Sp. z.o.o. – известный производитель тестовых приборов – применяет KUKA KR 6 R900 для пайки печатных плат. В результате время выполнения заказов уменьшается в два раза.
Ряд предприятий использует шестиосевой робот-манипулятор Yaskawa Motoman Mh22 для сборки компьютерных жестких дисков.
Пищевая промышленность
Atria Scandinavia – шведская компания, которая выпускает вегетарианские продукты. Упаковкой, маркировкой и укладкой занимаются манипуляторы UR 10. Они обрабатывают более 200 позиций в час на каждой линии производства.
Сельское хозяйство
Некоторые роботы могут собирать урожай. Например, Agrobot SW6010 использует сенсоры и манипуляторы для обнаружения и сбора спелой клубники. В систему «Vegebot», которая предназначена для сбора салата, входит робот-манипулятор UR10 с шестью степенями свободы.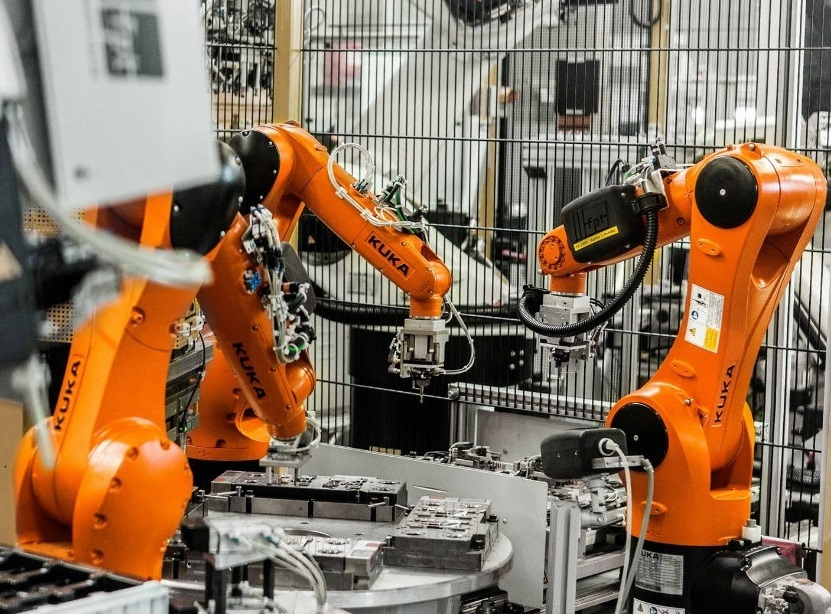
Заключение
В наше время между понятием «конкурентоспособность» и понятием «автоматизация» нередко ставится знак равенства. Современные роботы рентабельны даже для небольших организаций, поскольку улучшают условия труда, повышают производительность и качество выпускаемой продукции. Затраты на них быстро окупаются.
Таким образом, промышленные роботы с легкостью внедряются в любые производственные процессы, следовательно, их разработка и внедрение значительно расширяют возможности и перспективы робототехники.
Приобрести Робот манипулятор и задать свой вопрос, или сделать предложение, вы можете, связавшись с нами:
- По телефону: 8(800)775-86-69
- Электронной почте:[email protected]
- Или на нашем сайте: https://3dtool.ru/
Не забывайте подписываться на наш YouTube канал :
Вступайте в наши группы в соц.сетях:
ВКонтакте
Какие существуют типы промышленных роботов и их применение?
Какие существуют типы промышленных роботов и их применение?
Большое количество производителей используют промышленных роботов для автоматизации задач, повышения безопасности работников и увеличения общей производительности при одновременном снижении отходов и эксплуатационных расходов.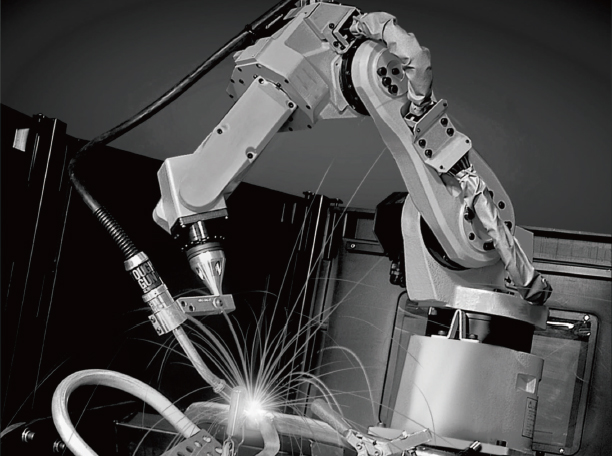 Поскольку промышленные роботы становятся все более распространенными в производственной среде, возрос спрос на множество различных типов промышленных роботов для конкретных приложений и отраслей. В этом посте мы рассмотрим, какие типы промышленных роботов доступны на рынке, как они работают и в каких приложениях или отраслях они обычно используются.
Поскольку промышленные роботы становятся все более распространенными в производственной среде, возрос спрос на множество различных типов промышленных роботов для конкретных приложений и отраслей. В этом посте мы рассмотрим, какие типы промышленных роботов доступны на рынке, как они работают и в каких приложениях или отраслях они обычно используются.
Декартовы роботы
Декартовы роботы, также называемые линейными роботами или портальными роботами, представляют собой промышленные роботы, которые работают с тремя линейными осями и используют декартову систему координат (X, Y и Z), что означает, что они движутся по прямым линиям по трем осям (вверх-вниз, внутрь-наружу и из стороны в сторону). Декартовы роботы являются популярным выбором из-за высокой гибкости их конфигураций, что дает пользователям возможность регулировать скорость, точность, длину хода и размер робота. Декартовы роботы являются одним из наиболее часто используемых типов роботов для промышленного применения и часто используются для станков с ЧПУ и 3D-печати.
Роботы SCARA
SCARA — это аббревиатура, которая расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Роботы SCARA работают по трем осям (X, Y и Z), а также имеют вращательное движение. Роботы SCARA превосходно справляются с боковыми движениями, обычно они движутся быстрее и легче интегрируются, чем декартовы роботы. Как правило, роботы SCARA используются для сборки и укладки на поддоны, а также в биомедицинских целях.
Шарнирные роботы
Шарнирные роботы механическое движение и конфигурация очень похожи на человеческую руку. Рука крепится к основанию с помощью поворотного соединения. Сама рука может иметь от двух до десяти вращающихся соединений, которые действуют как оси, причем каждое дополнительное соединение или ось обеспечивает большую степень движения. Большинство шарнирных роботов используют четыре или шесть осей. Типичными областями применения шарнирно-сочлененных роботов являются сборка, дуговая сварка, погрузочно-разгрузочные работы, обслуживание машин и упаковка.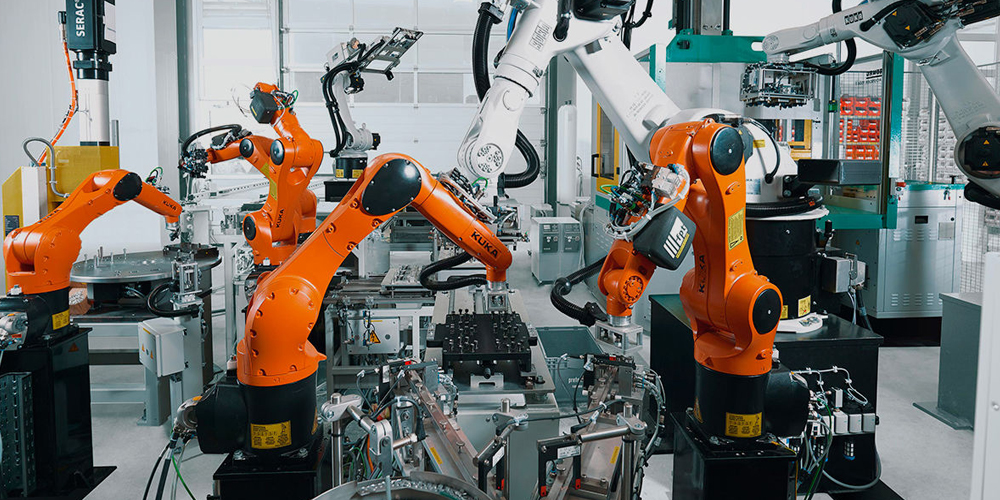
Цилиндрические роботы
Цилиндрические роботы имеют вращающееся соединение в основании и призматическое соединение для соединения звеньев. Роботы имеют рабочую оболочку цилиндрической формы, что достигается за счет вращающегося вала и выдвижной руки, которая движется вертикально и скользит. Цилиндрические роботы часто используются в узких рабочих местах для простой сборки, обслуживания машин или нанесения покрытий из-за их компактной конструкции.
Роботы Дельта
Дельта-роботы, или параллельные роботы, имеют три руки, соединенные с единой базой, установленной над рабочим местом. Дельта-роботы работают в форме купола и могут двигаться деликатно и точно на высоких скоростях благодаря тому, что каждое сочленение концевого эффектора напрямую контролируется всеми тремя руками. Роботы Delta часто используются для быстрого захвата и размещения товаров в пищевой, фармацевтической и электронной промышленности.
Роботы Polar
Роботы Polar, или сферические роботы, имеют руку с двумя вращающимися шарнирами и одним линейным шарниром, соединенным с основанием поворотным шарниром. Оси робота работают вместе, чтобы сформировать полярную координату, что позволяет роботу иметь сферическую рабочую оболочку. Роботы Polar считаются одними из первых когда-либо разработанных промышленных роботов. Роботы Polar обычно используются для литья под давлением, литья под давлением, сварки и обработки материалов.
Оси робота работают вместе, чтобы сформировать полярную координату, что позволяет роботу иметь сферическую рабочую оболочку. Роботы Polar считаются одними из первых когда-либо разработанных промышленных роботов. Роботы Polar обычно используются для литья под давлением, литья под давлением, сварки и обработки материалов.
Коллаборативные роботы
Коллаборативные роботы или коботы — это роботы, которые могут напрямую и безопасно взаимодействовать с людьми в общем рабочем пространстве. На рынке представлено множество типов и марок коллаборативных роботов — узнайте больше здесь. Коботы обычно используются для захвата и размещения, укладки на поддоны, проверки качества и обслуживания машин.
6 основных типов промышленных роботов, используемых в мировом производстве 2018
31 августа 2018 г.
Благодаря быстрому технологическому развитию робототехники и автоматизации в производственном секторе наблюдается более широкое внедрение робототехники и технологий в…
более широкое внедрение робототехники и технологий в свои производственные процессы.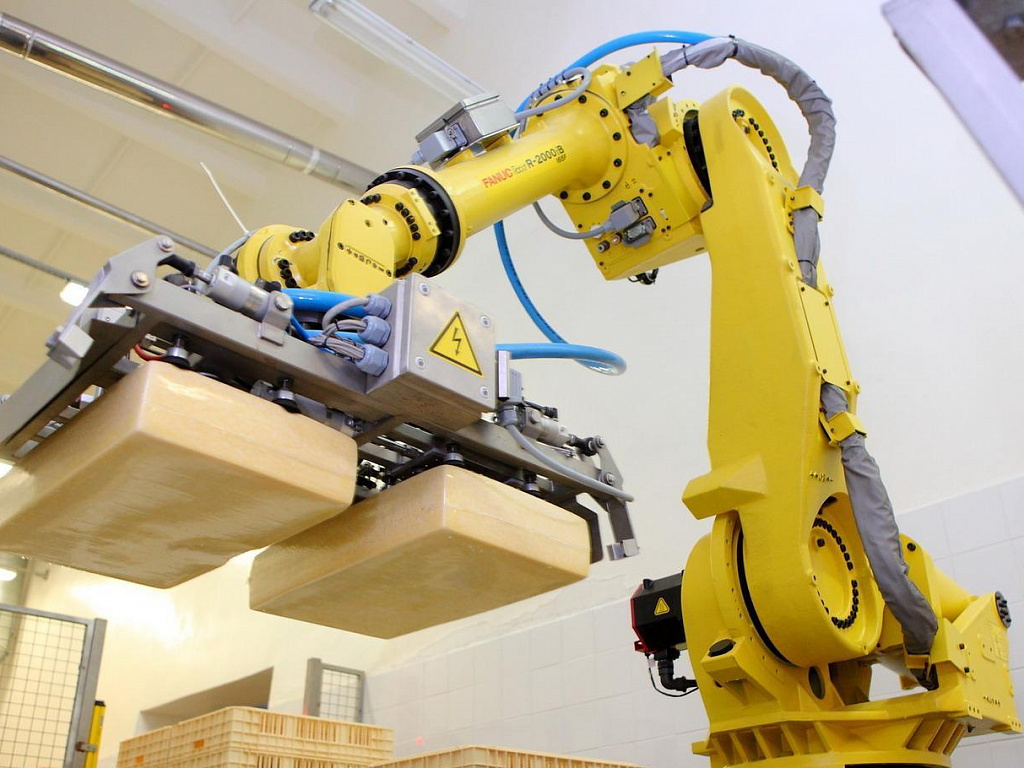 Промышленные роботы используются для выполнения задач с высокой точностью и повторяемостью, что приводит к продукции более высокого качества. Способность промышленных роботов работать непрерывно без перерыва помогает производителям увеличивать объемы производства. Более того, роботы могут работать в опасных и вредных средах, тем самым улучшая условия труда и безопасность производственного предприятия. Таким образом, несколько преимуществ промышленных роботов побуждают производителей интегрировать различные типы промышленных роботов в свои производственные линии для повышения эффективности и прибыльности предприятия.
Промышленные роботы используются для выполнения задач с высокой точностью и повторяемостью, что приводит к продукции более высокого качества. Способность промышленных роботов работать непрерывно без перерыва помогает производителям увеличивать объемы производства. Более того, роботы могут работать в опасных и вредных средах, тем самым улучшая условия труда и безопасность производственного предприятия. Таким образом, несколько преимуществ промышленных роботов побуждают производителей интегрировать различные типы промышленных роботов в свои производственные линии для повышения эффективности и прибыльности предприятия.
Ожидается, что к 2022 году рынок робототехники для упаковки пищевых продуктов будет расти со среднегодовым темпом более 10 %. инвестировать в исследования и разработки, чтобы предоставить конечным пользователям более сложные и индивидуальные решения для автоматизации.
В отчете Technavio об исследовании рынка робототехники для пищевой упаковки за 2018–2022 гг. будет представлен углубленный анализ размера рынка, конкурентной среды, сегментации рынка, а также основных факторов и тенденций, способствующих росту рынка. ЗАПРОСИТЕ БЕСПЛАТНЫЙ ОБРАЗЕЦ СЕГОДНЯ
будет представлен углубленный анализ размера рынка, конкурентной среды, сегментации рынка, а также основных факторов и тенденций, способствующих росту рынка. ЗАПРОСИТЕ БЕСПЛАТНЫЙ ОБРАЗЕЦ СЕГОДНЯ
Основные типы промышленных роботов в 2018 году
В зависимости от механической конфигурации промышленные роботы можно разделить на шесть основных типов, а именно: шарнирные роботы, декартовы роботы, роботы SCARA, дельта-роботы, полярные роботы и цилиндрические роботы. Помимо механической конфигурации, промышленные роботы также могут быть классифицированы на основе управления движением, управления питанием и физических характеристик.
В этом блоге основное внимание будет уделено основным типам промышленных роботов по конфигурации, их преимуществам и недостаткам, а также областям применения.
Шарнирные роботы
Шарнирные роботы — один из самых популярных типов промышленных роботов. По своей механической конфигурации он напоминает человеческую руку. Рука соединена с основанием скручивающимся соединением. Количество поворотных сочленений, соединяющих звенья в руке, может варьироваться от двух до десяти сочленений, и каждое сочленение обеспечивает дополнительную степень свободы. Стыки могут быть параллельными или ортогональными друг другу. Шарнирные роботы с шестью степенями свободы являются наиболее часто используемыми промышленными роботами, поскольку их конструкция обеспечивает максимальную гибкость.
Количество поворотных сочленений, соединяющих звенья в руке, может варьироваться от двух до десяти сочленений, и каждое сочленение обеспечивает дополнительную степень свободы. Стыки могут быть параллельными или ортогональными друг другу. Шарнирные роботы с шестью степенями свободы являются наиболее часто используемыми промышленными роботами, поскольку их конструкция обеспечивает максимальную гибкость.
Преимущества
- Высокая скорость
- Большая рабочая зона для минимальной площади пола
- Упрощено выравнивание по нескольким плоскостям
Недостатки
- Требуется специальный контроллер робота
- Сложное программирование
- Сложная кинематика
Применение
- Пищевая упаковка
- Дуговая сварка
- Точечная сварка
- Транспортировка материалов
- Обслуживание машин
- Автомобильная сборка
- Производство стальных мостов
- Резка стали
- Работа со стеклом
- Применение в литейном и кузнечном производстве
Скачать отчет о мировом рынке промышленных сварочных роботов 2017-2021 Образец бесплатно
Декартовы роботы
Декартовы роботы также называются прямолинейными или портальными роботами и имеют прямоугольную конфигурацию. Эти типы промышленных роботов имеют три призматических шарнира для обеспечения линейного движения за счет скольжения по трем перпендикулярным осям (X, Y и Z). У них также может быть прикрепленное запястье, позволяющее совершать вращательные движения. Декартовы роботы используются в большинстве промышленных приложений, поскольку они обеспечивают гибкость в своей конфигурации, что делает их подходящими для конкретных приложений.
Эти типы промышленных роботов имеют три призматических шарнира для обеспечения линейного движения за счет скольжения по трем перпендикулярным осям (X, Y и Z). У них также может быть прикрепленное запястье, позволяющее совершать вращательные движения. Декартовы роботы используются в большинстве промышленных приложений, поскольку они обеспечивают гибкость в своей конфигурации, что делает их подходящими для конкретных приложений.
Преимущества
- Обеспечивает высокую точность позиционирования
- Простое управление
- Легко программируется в автономном режиме
- Широкие возможности настройки
- Может выдерживать большие нагрузки
- Меньше стоимости
Недостатки
- Требуется большая рабочая и монтажная площадь
- Комплекс в сборе
- Движение ограничено только одним направлением за раз
Приложение
- Операции захвата и размещения
- Погрузка и разгрузка
- Транспортировка материалов
- Сборка и сборка
- Обращение с ядерными материалами
- Клеевые аппликации
Скачать образец отчета о глобальном рынке промышленных роботов в автомобильной промышленности 2018-2022 гг. выбранная плоскость. Вращающиеся валы расположены вертикально, а концевой эффектор, прикрепленный к плечу, перемещается горизонтально. Роботы SCARA специализируются на боковых перемещениях и в основном используются для сборки. Роботы SCARA могут двигаться быстрее и легче интегрируются, чем цилиндрические и декартовы роботы.
выбранная плоскость. Вращающиеся валы расположены вертикально, а концевой эффектор, прикрепленный к плечу, перемещается горизонтально. Роботы SCARA специализируются на боковых перемещениях и в основном используются для сборки. Роботы SCARA могут двигаться быстрее и легче интегрируются, чем цилиндрические и декартовы роботы.
Преимущества
- Высокая скорость
- Отличная воспроизводимость
- Большое рабочее пространство
Недостатки
- Требуется специальный контроллер робота
- Только для плоских поверхностей
- Трудно программировать в автономном режиме
Приложение
- Сборочное приложение
- Работа с полупроводниковыми пластинами
- Биомедицинские приложения
- Упаковка
- Укладка на поддоны
- Загрузка машины
Получите БЕСПЛАТНЫЙ отчет о мировом рынке упаковочных роботов за 2017–2021 гг.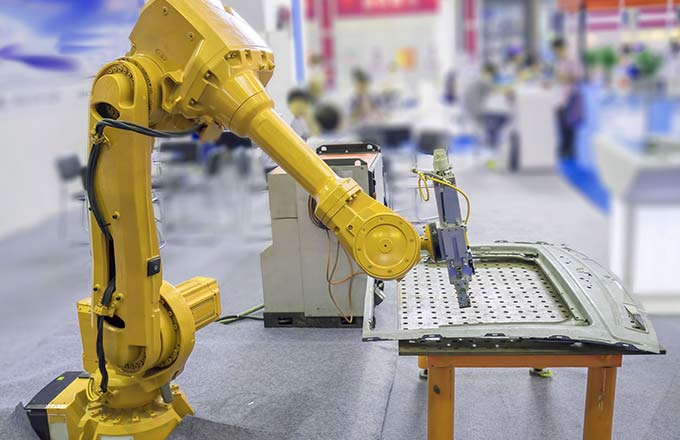 Образец прямо сейчас
Образец прямо сейчас
Дельта-роботы
Дельта-роботы также называются роботами с параллельными соединениями, поскольку они состоят из параллельных соединений, соединенных с общей базой. Благодаря прямому управлению каждым суставом над концевым зажимом положением концевого зажима можно легко управлять с помощью его рычагов, что обеспечивает высокую скорость работы. Дельта-роботы имеют куполообразную рабочую оболочку. Эти роботы обычно используются для быстрого захвата и перемещения товаров.
Преимущества
- Очень высокая скорость
- Высокая точность работы
Недостатки
- Сложность эксплуатации
- Требуется специальный контроллер робота
Применение
- Пищевая промышленность
- Фармацевтическая промышленность
- Электронная промышленность
- Авиасимуляторы
- Автомобильные тренажеры
- Выравнивание оптического волокна
Ознакомьтесь с нашим отчетом о мировом рынке промышленных роботов в отрасли бытовой техники, 2018-2022 гг. подключение ссылок. Их также называют сферическими роботами, поскольку они имеют сферическую рабочую оболочку, а оси образуют полярную систему координат. Эти роботы имеют центрально вращающийся вал и выдвижную вращающуюся руку. Конфигурация орудийной башни полярных роботов охватывает большой объем пространства, но доступ руки ограничен в пределах ее рабочего пространства.
подключение ссылок. Их также называют сферическими роботами, поскольку они имеют сферическую рабочую оболочку, а оси образуют полярную систему координат. Эти роботы имеют центрально вращающийся вал и выдвижную вращающуюся руку. Конфигурация орудийной башни полярных роботов охватывает большой объем пространства, но доступ руки ограничен в пределах ее рабочего пространства.
Преимущества
- Может охватывать все вокруг
- Может достигать выше или ниже препятствий
- Большой рабочий объем
- Требуется меньше места на полу
Недостатки
- Не может подняться над собой
- Короткий вертикальный вылет
- Низкая точность и повторяемость в направлении вращательного движения
- Требуется сложная система управления
- Вышло из моды и не встречается в новых проектах
Применение
- Литье под давлением
- Работа со стеклом
- Укладка и разборка
- Литье под давлением
- Ковка
- Сварка
- Транспортировка материалов
Скачать отчет о мировом рынке роботов для литья металлов за 2018-2022 гг.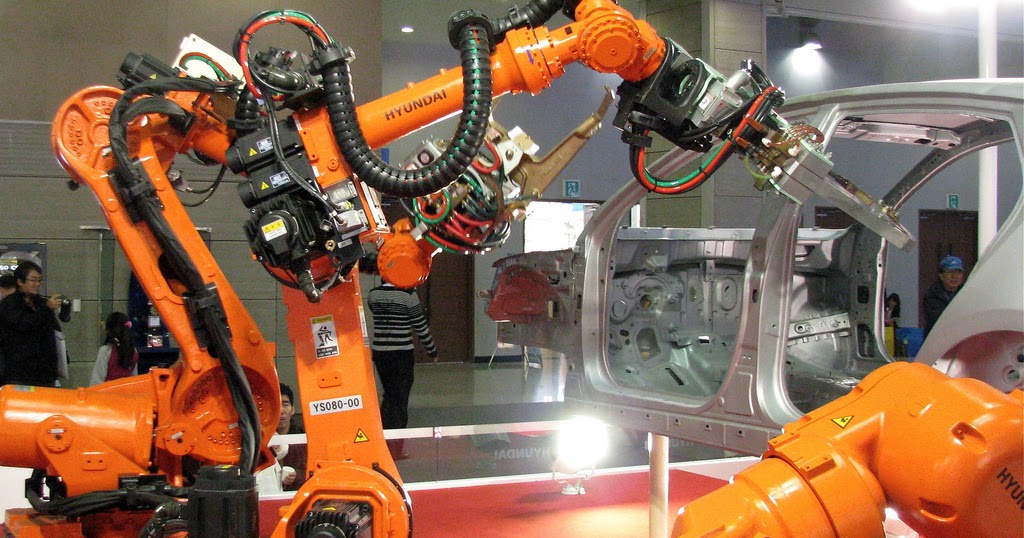 Образец БЕСПЛАТНО
Образец БЕСПЛАТНО
Цилиндрические роботы
Цилиндрические роботы имеют как минимум одно вращающееся соединение в основании и как минимум одно призматическое соединение, соединяющее звенья. Эти роботы имеют цилиндрическое рабочее пространство с поворотным валом и выдвижной рукой, которая перемещается вертикально и за счет скольжения. Таким образом, роботы с цилиндрической конфигурацией обеспечивают вертикальное и горизонтальное линейное перемещение наряду с вращательным движением вокруг вертикальной оси. Компактная конструкция конца манипулятора позволяет роботу достигать узких рабочих зон без потери скорости и повторяемости. Он в основном используется в простых приложениях, где материалы подбираются, вращаются и размещаются.
Преимущества
- Простота в эксплуатации и установке
- Минимальная сборка
- Может достигать всего вокруг себя
- Требуется меньше места на полу
- Может нести большую полезную нагрузку
Недостатки
- Нельзя обходить препятствия
- Низкая точность направления вращательного движения
- Вышло из моды и не встречается в новых проектах
Приложение
- Перевозка ЖК-панелей
- Приложения для сборки
- Нанесение покрытий
- Литье под давлением
- Применение в литейном и кузнечном производстве
- Машина для загрузки и разгрузки
Получите БЕСПЛАТНЫЙ образец отчета о мировом рынке полочных роботов за 2018-2022 гг.
Всего комментариев: 0