Промышленные роботы примеры: виды использования, для чего нужны, примеры применения в производстве и разновидности
Содержание
виды использования, для чего нужны, примеры применения в производстве и разновидности
Автоматизация производства — выгодный подход к ведению любого бизнеса. Решающую роль в этом процессе играют промышленные роботы, которые все чаще встречаются на крупных предприятиях и заводах. В этой статье речь пойдет о видах подобных устройств, сферах их применения, а также о хорошо зарекомендовавших себя производителей этой чудо-техники.
Что такое промышленные роботы?
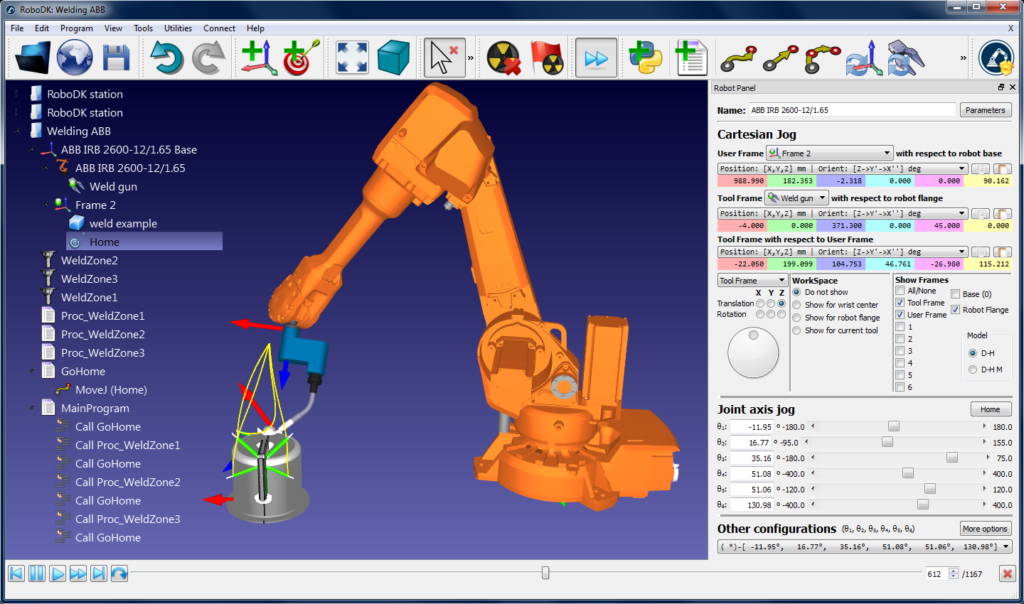
Промышленные роботы — техника, которая полностью автоматизирована. Она состоит из манипулятора и системы управления. Роботы перед началом работы программируются: им задают параметры, необходимые для выполнения определенных задач, включающих перемещение по траектории и движение органов манипулятора.
Перемещение промышленного робота внутри зданий и сооружений происходит путем передвижения по монорельсам либо напольной колее, а процесс управления им выполняется с помощью:
- программного обеспечения — это способ считается самым простым и подходит для роботов-манипуляторов;
- адаптивного управления — такие роботы оснащены сенсорными датчиками, основная функция которых состоит в том, что они могут самостоятельно определять и анализировать процесс выполнения работы и принимать решение о дальнейших действиях;
- искусственного интеллекта;
- дистанционного управления человеком.


Роботы в промышленности имеют большой перечень использования. Основными направлениями можно назвать следующие категории:
- сварочные;
- машиностроительные;
- режущие;
- комплектовочные;
- сборочные;
- упаковочные;
- складские;
- малярные.
Виды
Далее рассмотрим основные виды промышленных роботов и принципы их работы.
Специализированные роботы
Специализированные промышленные роботы используются в области паллетирования, сварочных работ и покраске. Поговорим о каждой более детально.
Покрасочные работы
Покраска деталей любого типа с помощью промышленного робота всегда приносит желаемый и качественный результат. При правильном программировании материал наносится равномерно, без капель и разводов. Также благодаря роботизированной окраске исключается риск отравления организма опасными парами краски.
Сварочные работы
Сварочные работы, производимые специализированными роботами, значительно экономят время и затраты на рабочую силу. Они способны создавать конструкции, от простейших до самых сложных. Разделить сварочные роботы можно на следующие категории:
Они способны создавать конструкции, от простейших до самых сложных. Разделить сварочные роботы можно на следующие категории:
- Лазерные. Благодаря лазерной сварке металл не подвергается деформации, а сами сварочные работы проходят на высоких скоростях и требуют незначительных затрат.
- Дуговые. Во время сварочных работ возникает электрическая дуга, которая расплавляет материал, заполняя им шов. Электроды для сварки бывают расходуемые и нерасходуемые.
- Точечные. Это самый распространенный вид сварки, который применяется при обработке большинства металлических изделий.
- Газовые. Преимуществом такой сварки является быстрое схватывание материала путем непрерывной подачи газа к наконечнику. Образованное пламя выдает температуру 2 500–3 000 градусов.
- Плазменные. Такую технологию применяют для сварки сложных металлических соединений. В работе используется сжатый ионизированный газ, который проходит через медное сопло промышленного робота.
Паллетирование
Робот-паллетизатор способен как загружать товар на поддон, так и разгружать его для дальнейшей транспортировки. Робот-укладчик умеет передвигать грузы от нескольких килограммов до тонн. Он может работать сутками, сортируя любую продукцию при помощи программирования.
Для справки. Паллетирование — процесс размещения предметов на транспортируемые поддоны в рамках логистического цикла.
Роботы-манипуляторы
В основном робот-манипулятор состоит из 7 сегментов:
- датчик обратной связи;
- захватное устройство;
- кисть манипулятора;
- рука манипулятора;
- колонка;
- несущая конструкция;
- привод руки.
Благодаря слаженной работе всех сегментов, движения робота осуществляются плавно и точно.
Традиционные роботы-манипуляторы
Такие роботы способны совершать сложные манипуляции под разными углами. Для перемещения деталей техника может использовать специальные захваты или пневматические присоски.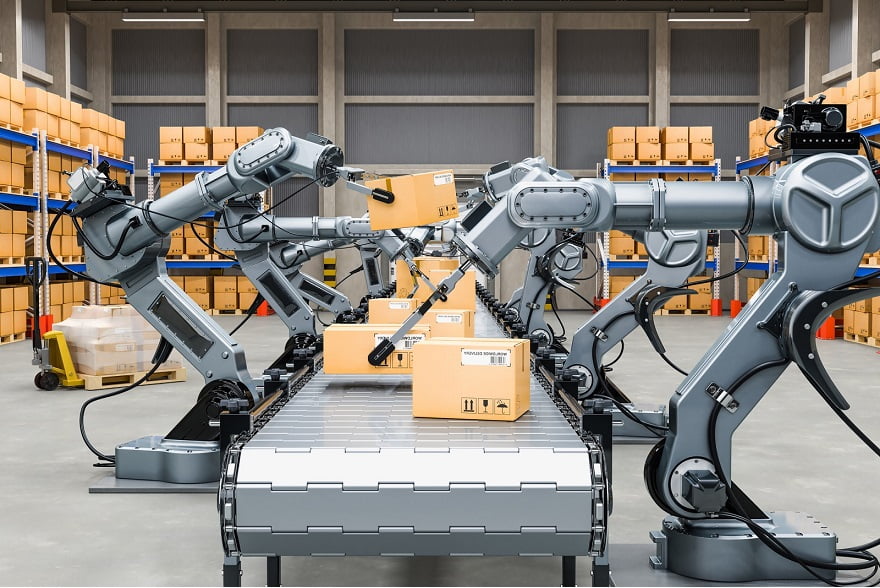
Дельта-роботы
Такие роботы чаще всего применяются в пищевой, фармацевтической и электронной промышленности. Дельта-роботы трудятся на конвейерах, раскладывая мелкие детали с высокой точностью и скоростью.
Роботы типа SCARA
Для справки. SCARA — это кинематика, основанная на рычажной системе. За счет вращательного рычажного механизма происходит перемещение конечного звена в плоскости.
Роботы типа SCARA — незаменимые работники в условиях ограниченного пространства. Такие автоматизированные устройства особенно выгодно использовать для сборки узлов, которые вкладывают одну деталь в другую и не требуют соединения. Важной функцией в работе робота является способность выпрямлять и сгибать рабочий «локоть» в одной плоскости, используя при этом минимальное пространство.
Роботы для обслуживания станков
Такие роботы трудятся совместно со станками, обеспечивая загрузку последних материалами в круглосуточном режиме. Так, производительность станка увеличивается на 20 %. Процесс проходит следующим образом: рука-манипулятор загружает сырье в станок, а после обработки робот вынимает готовую деталь.
Процесс проходит следующим образом: рука-манипулятор загружает сырье в станок, а после обработки робот вынимает готовую деталь.
Обратите внимание! Один робот может обслуживать сразу несколько станков.
Коллаборативные роботы
Коллаборативные роботы (сокращенное название «коботы») работают совместно с человеком. Коботы очень компактны и безопасны для человека. Это отличный помощник, который не знает усталости и не теряет внимательности.
Основная сфера применения коботов — это автомобилестроение и производство электроники. Не менее популярными операциями являются погрузка, перемещение и сборка.
Для чего нужны: области применения
Чаще всего промышленные роботы находят применение на крупных заводах и предприятиях. Их главная особенность в том, что они способны работать в круглосуточном режиме без участия человека. Достаточно только специальной программы, которая будет управлять роботом.
На заметку. С помощью промышленных роботов можно создать полный производственный цикл, который будет отличаться особой точностью и в то же время снизит риск возникновения ошибок вследствие человеческого фактора.
Автомобильная промышленность
Автомобильная промышленность — лидер по использованию в производственном цикле роботов. Такое решение позволяет существенно сократить время и обезопасить процесс.
Автопром потребляет треть всех автоматизированных систем в мире, выступая в роли основного двигателя в развитии промышленной робототехники.
Сегодня на любом автомобильном заводе или конструкторском бюро можно встретить все меньше людей и все больше роботов. Будущие машины практически полностью производят роботы: они проектируют, сваривают, собирают и даже окрашивают транспортные средства. Такой подход позволяет повысить рентабельность и сделать гибким сам процесс производства, минимизируя при этом риск возможных ошибок.
Производство электроники
Использование промышленных манипуляторов при производстве электроники позволяет оптимизировать процесс. Промышленные роботы дают возможность любой компании автоматизировать график производства и практически полностью исключить ручные задачи.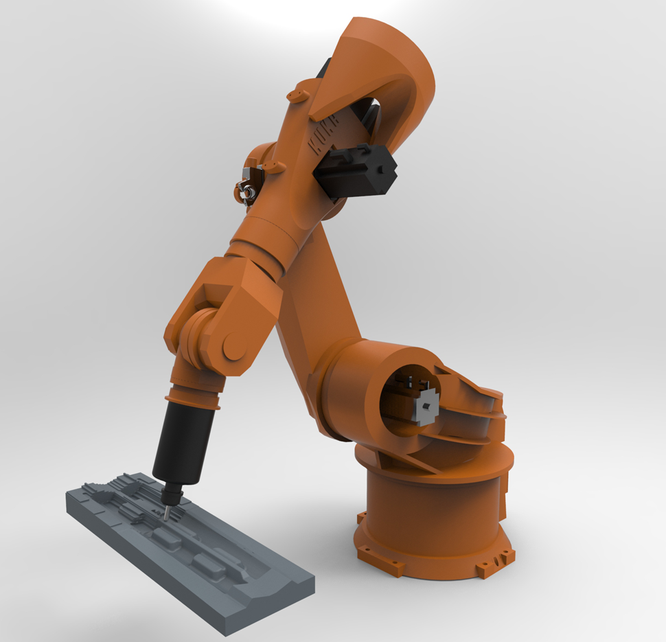 Подобные манипуляторы быстро окупаются за счет существенного снижения себестоимости продукции. Перечислим основные преимущества от использования промышленных роботов при производстве электроники:
Подобные манипуляторы быстро окупаются за счет существенного снижения себестоимости продукции. Перечислим основные преимущества от использования промышленных роботов при производстве электроники:
- снижение производственного травматизма;
- высокая точность при выполнении поставленной задачи;
- минимальное вмешательство людей в производственный цикл;
- высокое качество готовой продукции.
Пищевая промышленность
Использование роботов в пищевой промышленности набирает все большую популярность. Подобные автоматизированные механизмы применяют как при первичной, так и при вторичной переработке продуктов. Перечислим основные сферы производства, в которых успешно применяют труд роботов:
- разделка мяса;
- сортировка фруктов и овощей;
- резка продуктов;
- сортировка продукции;
- оформление кондитерских изделий;
- промывка пищевых продуктов.
Роботы в пищевой промышленности — это не просто дань модным тенденциям. Такой подход к ведению бизнеса позволит быстро окупить затраты на автоматизированные устройства и в дальнейшем снизить себестоимость продукции.
Такой подход к ведению бизнеса позволит быстро окупить затраты на автоматизированные устройства и в дальнейшем снизить себестоимость продукции.
Сельское хозяйство
Чаще всего в сельском хозяйстве используют так называемых полевых роботов. Есть и другие категории. Перечислим их:
- беспилотники;
- доильные роботы;
- роботы для уборки навоза;
- автоматические раздатчики корма;
- роботизированные тракторы и комбайны.
Рост затрат на сельскохозяйственную продукцию, повышение спроса и увеличение численности населения стимулируют массовую автоматизацию сельского хозяйства. Сегодня роботы помогают справиться с несколькими задачами — они обрабатывают и удобряют почву, занимаются посадкой растений и надоем скота, кормят и поят животных. Использование такой техники в сельском хозяйстве позволяет достичь положительных результатов, а именно:
- снизить себестоимость производимой продукции;
- улучшить показатели качества;
- снизить экологическую нагрузку на сельское хозяйство;
- повысить уровень безопасности.

Лучшие производители в мире
На рынке существует большое количество промышленных роботов, но стоит рассмотреть основных лидеров в этой сфере.
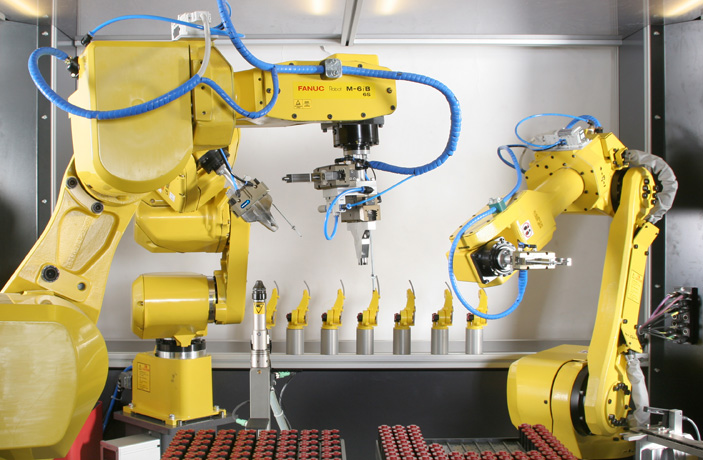
Fanuc
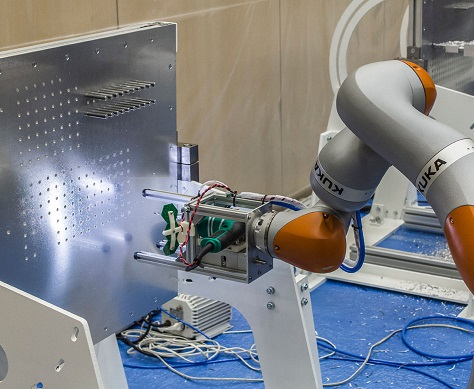
Fanuc — японская компания, поставляющая на рынок высокопроизводительные роботы-манипуляторы. Одной из лучших моделей разработчика является робот FANUC LR Mate 200iD/7LC. Он предназначен для лабораторий и чистых помещений. Эта модель обладает высокой досягаемостью и производительностью.
Hanwha
Hanwha — ведущая южнокорейская компания, которая представила рынку коллаборативный робот HCR-5A, хорошо зарекомендовавший себя во всем мире.
HCR-5A — робот, обладающий высокой точностью к производимым операциям. Может выполнять любые поставленные задачи, а именно:
- сборка;
- полировка;
- обслуживание станков;
- сортировка;
- упаковка;
- паллетирование.
Kuka
Kuka — немецкая компания, специализирующаяся на производстве промышленных роботов. Фирма может похвастаться своей моделью KR 420 R3080 (KR 500 FORTEC).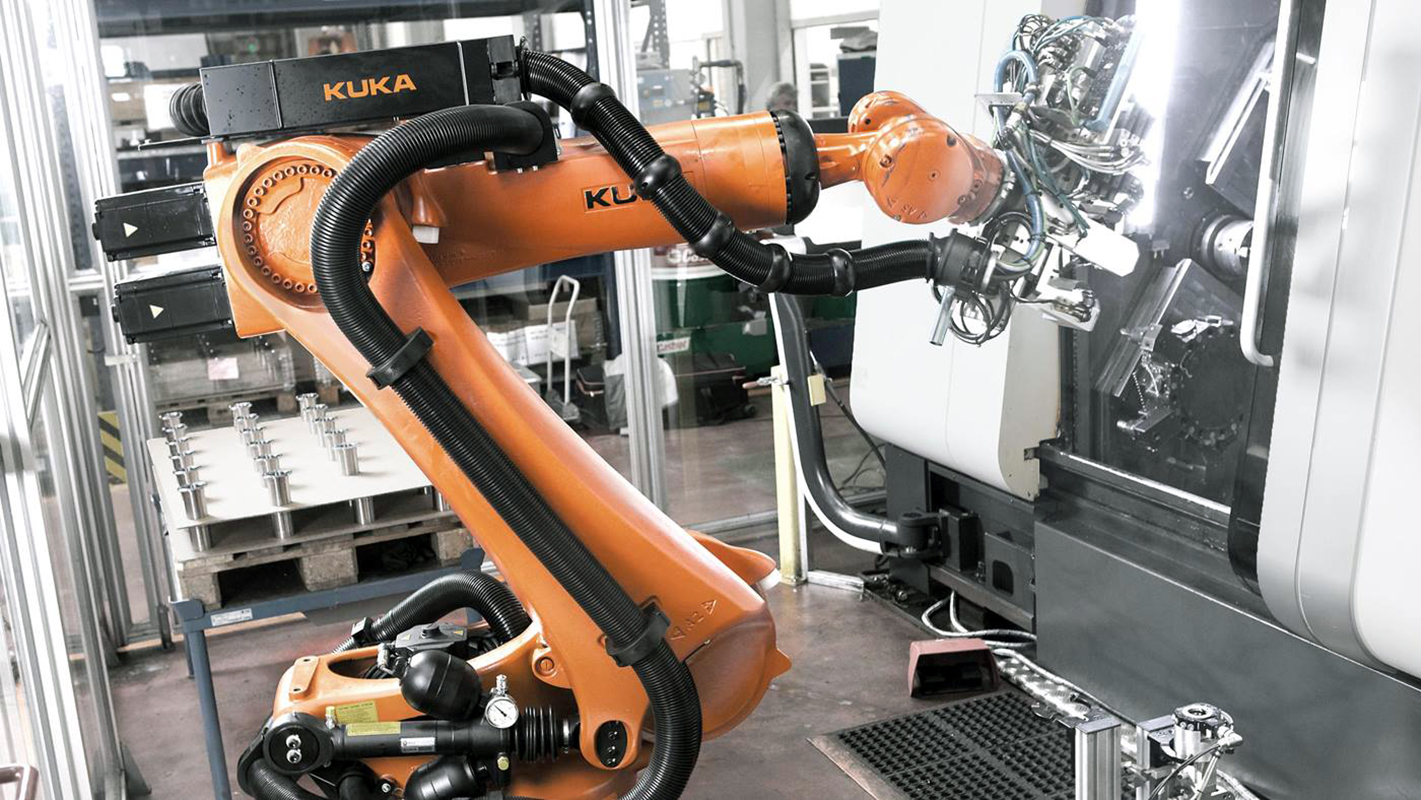 Данный робот имеет увеличенную рабочую зону и может справляться с большими весами при своих небольших размерах. Монтирование устройства возможно как на полу, так и на потолке. Робот характеризуется высокой производительностью и эффективностью.
Данный робот имеет увеличенную рабочую зону и может справляться с большими весами при своих небольших размерах. Монтирование устройства возможно как на полу, так и на потолке. Робот характеризуется высокой производительностью и эффективностью.
Перспектива использования и преимущества
Решения по автоматизации производства на базе применения промышленных роботов наиболее верные. Такой подход позволит обеспечить полный цикл производства с минимальным вмешательством человеческого труда.
Преимущества использования промышленных роботов в производстве следующие:
- высокие показатели производительности труда;
- улучшение экономических показателей отрасли;
- качество;
- безопасность;
- минимизация рабочего пространства.
Пандемия, вызванная коронавирусной инфекцией, ускорила внедрение цифровых технологий абсолютно во все сферы жизни. Более 40 % компаний из 45 стран планируют автоматизировать производственные процессы полностью или частично.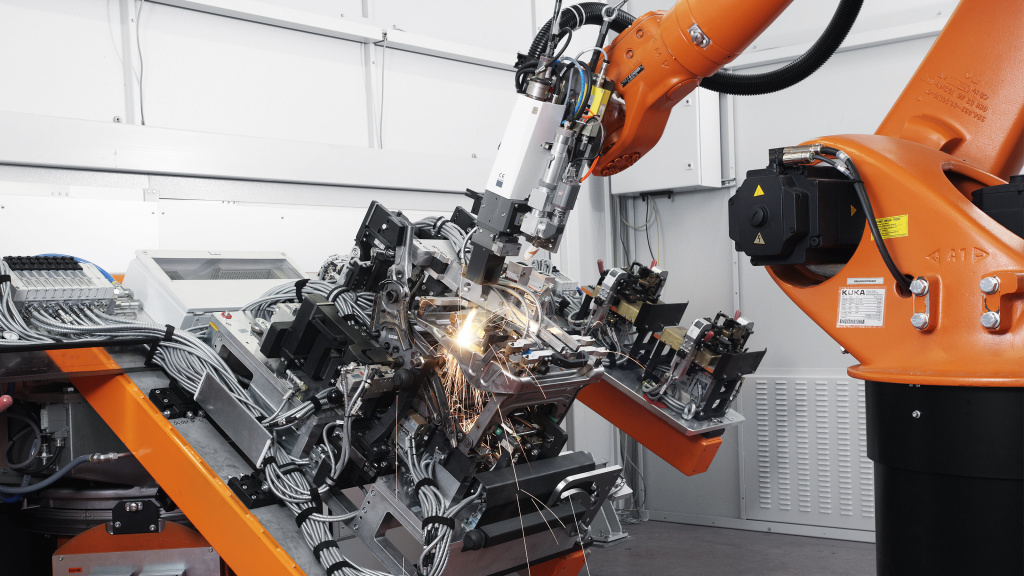 И если раньше роботы были доступны только для крупного производства, то в условиях посткризисной реальности малые и средние заказчики все чаще проявляют интерес к подобной технике.
И если раньше роботы были доступны только для крупного производства, то в условиях посткризисной реальности малые и средние заказчики все чаще проявляют интерес к подобной технике.
- 18 декабря 2020
- 1757
Получите консультацию специалиста
Промышленные роботы. Виды и устройство. Работа и применение
Промышленные роботы все чаще применяются на заводах и предприятиях. Их используют для осуществления функций управления, перемещения и движения в различных производственных процессах. Главная их особенность в том, что они не устают. Роботы могут работать круглосуточно без какого-либо участия человека, ведь для их функционирования нужна только заложенная программа, по которой они будут действовать. Они могут выполнять только определенные действия, но чаще всего их используют в автоматизированных производственных системах.
Благодаря использованию роботов удается создать полный цикл производства, который обеспечивает производительность и точность на весьма высоком уровне. Кроме того, практически полностью исключаются ошибки в производстве, которые так свойственны людям. Промышленная робототехника заявила о себе в 1961 году. Именно тогда был получен первый патент на робота. Однако первое серийное производство роботов началось в далеком в 1956 году. Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Кроме того, практически полностью исключаются ошибки в производстве, которые так свойственны людям. Промышленная робототехника заявила о себе в 1961 году. Именно тогда был получен первый патент на робота. Однако первое серийное производство роботов началось в далеком в 1956 году. Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
На текущий момент промышленные роботы условно можно поделить на три категории, в которых также можно выделить свои подвиды:
- Автоматические устройства. В эту категорию входят программные, адаптивные и биотехнические роботы:
— Программные представляют самую простейшую разновидность роботов, которые управляются автоматически. Эта разновидность широко применяется вследствие их не дороговизны. Они находят широкое применение на предприятиях для совершения простых операций по запланированной технологии.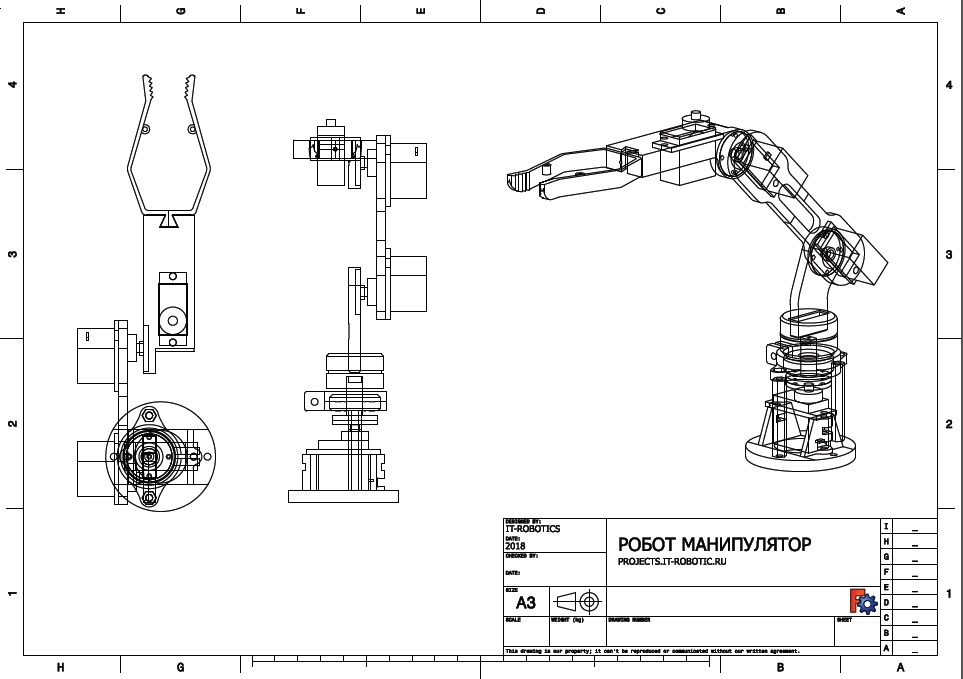 В большей части случаев у таких устройств нет сенсоров. При этом все действия производятся по циклической программе, которая заранее закладывается в блок памяти.
В большей части случаев у таких устройств нет сенсоров. При этом все действия производятся по циклической программе, которая заранее закладывается в блок памяти.
— Адаптивные. В отличие от первой разновидности такие роботы имеют сенсоры, а также ряд сопутствующих программ. Благодаря сигналам, которые идут к управляющей системе от всевозможных датчиков, происходит анализ окружающей обстановки. В результате полученных данных, робот может принимать решение, как ему действовать дальше. К примеру, он может начать выполнять другую операцию, если невозможно выполнить первую.
— Обучаемые. Подобные роботы способны учиться, то есть они выполняют действия согласно предыдущему обучению. К примеру, люди создают порядок действий, которые закладываются в блок управления робота.
— Интеллектуальные. Данные роботы имеют зачатки искусственного интеллекта, то есть они при помощи сенсорных датчиков могут без помощи людей воспринимать окружающую обстановку. То есть они создают виртуальное пространство, в котором могут ориентироваться и принимать решения о последующих действиях. То есть они могут обучаться по мере поступления опыта.
То есть они создают виртуальное пространство, в котором могут ориентироваться и принимать решения о последующих действиях. То есть они могут обучаться по мере поступления опыта.
— Командные. Это своего рода манипуляторы, которые дистанционно управляются оператором. Оператор подает команды на движение каждому его сочленению. Если говорить прямо, то это роботы только наполовину.
— Копирующие. Это манипуляторы, которые производят копирование действия, совершаемые оператором в заданный момент времени. К примеру, человек надевает перчатку и двигает пальцами, то и копирующий робот также будет двигать своими железными пальцами.
— Полуавтоматические. Для их управления оператору необходимо лишь задавать перемещение органа манипулятора. При этом система управления устройства сама согласует все необходимые движения и при необходимости выполнит их корректировку.
- Интерактивные промышленные роботы. В эту категорию входят автоматизированные, супервизорные и диалоговые роботы.
— Автоматизированные. Это роботы, где чередуются режимы автоматического управленческого процесса с биотехническими.
— Супервизорные. Это роботы, которые выполняют работу автоматически по заданному циклу, однако перемещение от одного этапа к следующему осуществляется по командам оператора.
— Диалоговые. Это автоматические роботы различного действия, которые могут взаимодействовать с оператором, применяя язык определенного уровня. К примеру, с помощью команд голосом.
Устройство
Промышленные роботы могут иметь различное устройство, что во многом определяется задачами, которые стоят перед ними. Однако на данный момент наиболее распространенными видами подобных устройств являются роботизированные манипуляторы.
Стандартный манипулятор выполнен из семи сегментов, которые соединяются с помощью шести суставов. Каждый сегмент выполнен из металлического корпуса и проводов. В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
Главная особенность шаговых двигателей в том, что они могут обеспечивать очень точные движения. Если компьютер даст команду суставу передвинуться ровно на 15 мм, то двигатель сделает то, что от него попросят. При этом движение будет точным каждый раз при совершении одного и того же действия.
Чтобы контролировать, правильно ли робот выполняет необходимые действия, применяются датчики движения. Если происходит малейшее отклонение от заданной программы, то происходит корреляция движения. Если же наблюдается значительное отклонение и невозможность его исправления, то сигнал подается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
Манипулятор также имеет устройства захвата, которые выполнены в виде человеческой руки с механическими пальцами. При необходимости захвата плоского предмета вместо механических пальцев может применяться пневматическая присоска. В случае необходимости захвата множества деталей может быть задействована конструкция в виде приспособления, специально разработанная для этого. К тому же вместо захватного устройства могут применяться и иные рабочие инструменты, к примеру, пульверизатор, отвертка и так далее.
Промышленные роботы также могут перемещаться по колее, выполненной на полу в виде монорельсов. В случае необходимости движения по неровной поверхности, используются другие конструкции, к примеру, пневматические присоски и тому подобное. Для питания роботов может использоваться аккумулятор, но чаще всего применяется промышленная электрическая сеть. Для управления используется компьютер, который командует роботом через провода или беспроводную связь. Также в самих роботах может быть установлен блок памяти, куда записывается необходимая программа.
Принцип действия
Промышленные роботы, которые имеют 6 суставов, внешне напоминают человеческую руку (плечо, локоть и запястье). В большинстве случаев плечо монтируется на неподвижной основе. В результате такой робот может иметь 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям.
Подобно человеческой руке манипулятор также перемещает концевой эффектор с одного места на другое. При оснащении концевого эффектора различными устройствами, у робота появляется возможность выполнять определенные технологические операции. Одним из наиболее распространенных вариантов является подобие руки, которая позволяет роботу хватать и перемещать объекты с места на место.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата и не ломать все подряд. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Управление такими роботами может быть выполнено:
- С помощью программы.
- Адаптивного управления. В этом случае используются сенсорные устройства. Получаемые сигналы анализируются, после чего уже выполняется необходимое действие.
- Управление осуществляется людьми, но на расстоянии.
- Своеобразным искусственным интеллектом.
Применение
Промышленные роботы могут применяться практически повсеместно. Уровень автоматизации сегодня достиг таких высот, что они могут полностью заменить человека. При этом один робот способен заменить усилия нескольких и даже десятков специалистов. Робот не будет знать отдыха и покоя, ему не нужна зарплата и отчисления в многочисленные социальные фонды, ему не нужно спать и есть. Ему не знакомы человеческие ошибки, приводящие к браку или поломке дорогостоящего инструмента и оборудования. Именно поэтому сегодня многие производства стараются автоматизировать.
Ему не знакомы человеческие ошибки, приводящие к браку или поломке дорогостоящего инструмента и оборудования. Именно поэтому сегодня многие производства стараются автоматизировать.
Промышленные роботы часто используют для:
- Контактной сварки.
- Плазменной резки.
- Покраски.
- Литья металлов.
- Нанесения лака.
- Дуговой сварки.
- Загрузочно-погрузочных работ.
- Бесконтактной обработки.
- Транспортирования изделий.
- Обработки резанием.
- Упаковки.
- Фрезерных операций.
- Раскроя материалов.
- Контрольно-измерительных операций.
- Обработки крупногабаритных деталей.
- Раскладки уложенной продукции.
- Изготовления объемных конструкций и тому подобное.
Как выбрать
- Если решили оснастить свое производство роботами, то нужно понимать для чего их покупаете. Одни типы роботов предназначены только для выполнения определенной технологической операции, другие – могут выполнять сразу несколько.
 В тоже время стоимость последних может быть на порядок выше, чем первых.
В тоже время стоимость последних может быть на порядок выше, чем первых. - Промышленные роботы – это технически сложные устройства, которые требуют грамотного программирования, настройки и обслуживания. Поэтому важно обращаться за покупкой в компанию, которая сможет не только продать, но и обеспечить полноценное его обслуживание.
- Если не хотите думать, как вклинить промышленного робота в технологическую операцию, как его подключить и использовать, то стоит покупать робота с услугой под ключ. Специалисты продающей компании сами подберут робота под Ваши требования, привезут, установят, наладят технологический процесс, проведут обучение и обеспечат его обслуживание.
Похожие темы:
- Исполнительные устройства. Виды и работа. Применение и особенности
- Кибернетика. Устройство и применение. Особенности и будущее
- Системы автоматики. Виды и особенности применения
- Биосенсоры. Устройство и работа. Виды и применение
Какие существуют типы промышленных роботов и их применение?
Какие существуют типы промышленных роботов и их применение?
Большое количество производителей используют промышленных роботов для автоматизации задач, повышения безопасности работников и увеличения общей производительности при одновременном снижении отходов и эксплуатационных расходов. Поскольку промышленные роботы становятся все более распространенными в производственной среде, возрос спрос на множество различных типов промышленных роботов для конкретных приложений и отраслей. В этом посте мы рассмотрим, какие типы промышленных роботов доступны на рынке, как они работают и в каких приложениях или отраслях они обычно используются.
Поскольку промышленные роботы становятся все более распространенными в производственной среде, возрос спрос на множество различных типов промышленных роботов для конкретных приложений и отраслей. В этом посте мы рассмотрим, какие типы промышленных роботов доступны на рынке, как они работают и в каких приложениях или отраслях они обычно используются.
Декартовы роботы
Декартовы роботы, также называемые линейными роботами или портальными роботами, представляют собой промышленные роботы, которые работают с тремя линейными осями и используют декартову систему координат (X, Y и Z), что означает, что они движутся по прямым линиям по трем осям (вверх-вниз, внутрь-наружу и из стороны в сторону). Декартовы роботы являются популярным выбором из-за высокой гибкости их конфигураций, что дает пользователям возможность регулировать скорость, точность, длину хода и размер робота. Декартовы роботы являются одним из наиболее часто используемых типов роботов для промышленного применения и часто используются для станков с ЧПУ и 3D-печати.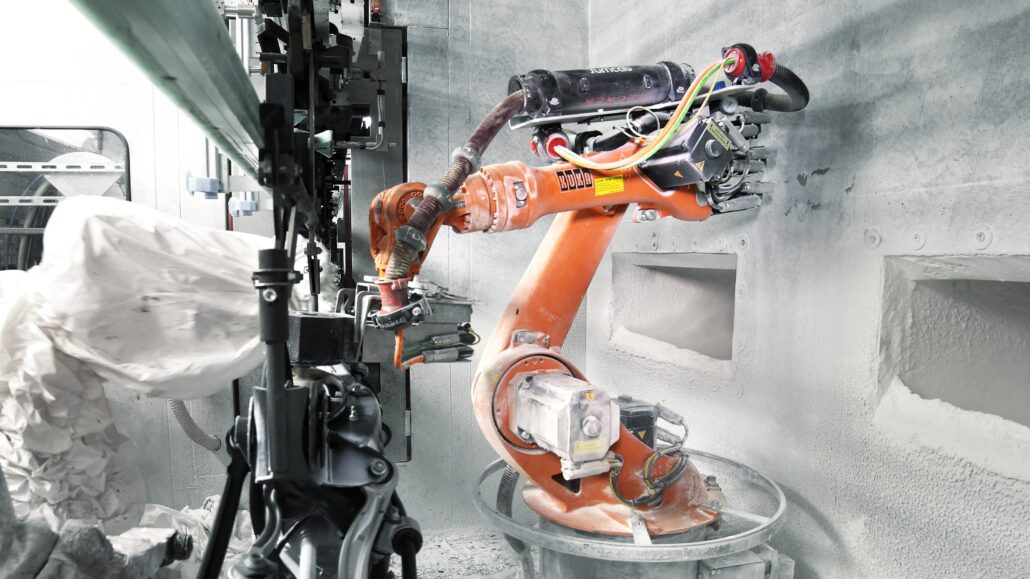
Роботы SCARA
SCARA — это аббревиатура, которая расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Роботы SCARA работают по трем осям (X, Y и Z), а также имеют вращательное движение. Роботы SCARA превосходно справляются с боковыми движениями, обычно они движутся быстрее и легче интегрируются, чем декартовы роботы. Как правило, роботы SCARA используются для сборки и укладки на поддоны, а также в биомедицинских целях.
Шарнирные роботы
Шарнирные роботы механическое движение и конфигурация очень похожи на человеческую руку. Рука крепится к основанию с помощью поворотного соединения. Сама рука может иметь от двух до десяти вращающихся соединений, которые действуют как оси, причем каждое дополнительное соединение или ось обеспечивает большую степень движения. Большинство шарнирных роботов используют четыре или шесть осей. Типичными областями применения шарнирно-сочлененных роботов являются сборка, дуговая сварка, погрузочно-разгрузочные работы, обслуживание машин и упаковка.
Цилиндрические роботы
Цилиндрические роботы имеют вращающееся соединение в основании и призматическое соединение для соединения звеньев. Роботы имеют рабочую оболочку цилиндрической формы, что достигается за счет вращающегося вала и выдвижной руки, которая движется вертикально и скользит. Цилиндрические роботы часто используются в узких рабочих местах для простой сборки, обслуживания машин или нанесения покрытий из-за их компактной конструкции.
Роботы Дельта
Дельта-роботы, или параллельные роботы, имеют три руки, соединенные с единой базой, установленной над рабочим местом. Дельта-роботы работают в форме купола и могут двигаться деликатно и точно на высоких скоростях благодаря тому, что каждое сочленение концевого эффектора напрямую контролируется всеми тремя руками. Роботы Delta часто используются для быстрого захвата и размещения товаров в пищевой, фармацевтической и электронной промышленности.
Роботы Polar
Роботы Polar, или сферические роботы, имеют руку с двумя вращающимися шарнирами и одним линейным шарниром, соединенным с основанием поворотным шарниром. Оси робота работают вместе, чтобы сформировать полярную координату, что позволяет роботу иметь сферическую рабочую оболочку. Роботы Polar считаются одними из первых когда-либо разработанных промышленных роботов. Роботы Polar обычно используются для литья под давлением, литья под давлением, сварки и обработки материалов.
Оси робота работают вместе, чтобы сформировать полярную координату, что позволяет роботу иметь сферическую рабочую оболочку. Роботы Polar считаются одними из первых когда-либо разработанных промышленных роботов. Роботы Polar обычно используются для литья под давлением, литья под давлением, сварки и обработки материалов.
Коллаборативные роботы
Коллаборативные роботы или коботы — это роботы, которые могут напрямую и безопасно взаимодействовать с людьми в общем рабочем пространстве. На рынке представлено множество типов и марок коллаборативных роботов — узнайте больше здесь. Коботы обычно используются для захвата и размещения, укладки на поддоны, проверки качества и обслуживания машин.
6 основных типов промышленных роботов, используемых в мировом производстве 2018
31 августа 2018 г.
Благодаря быстрому технологическому развитию робототехники и автоматизации в производственном секторе наблюдается более широкое внедрение робототехники и технологий в…
более широкое внедрение робототехники и технологий в свои производственные процессы. Промышленные роботы используются для выполнения задач с высокой точностью и повторяемостью, что приводит к продукции более высокого качества. Способность промышленных роботов работать непрерывно без перерыва помогает производителям увеличивать объемы производства. Более того, роботы могут работать в опасных и вредных средах, тем самым улучшая условия труда и безопасность производственного предприятия. Таким образом, несколько преимуществ промышленных роботов побуждают производителей интегрировать различные типы промышленных роботов в свои производственные линии для повышения эффективности и прибыльности предприятия.
Промышленные роботы используются для выполнения задач с высокой точностью и повторяемостью, что приводит к продукции более высокого качества. Способность промышленных роботов работать непрерывно без перерыва помогает производителям увеличивать объемы производства. Более того, роботы могут работать в опасных и вредных средах, тем самым улучшая условия труда и безопасность производственного предприятия. Таким образом, несколько преимуществ промышленных роботов побуждают производителей интегрировать различные типы промышленных роботов в свои производственные линии для повышения эффективности и прибыльности предприятия.
Ожидается, что к 2022 году рынок робототехники для упаковки пищевых продуктов будет расти со среднегодовым темпом более 10 %. инвестировать в исследования и разработки, чтобы предоставить конечным пользователям более сложные и индивидуальные решения для автоматизации.
В отчете Technavio об исследовании рынка робототехники для пищевой упаковки за 2018–2022 гг. будет представлен углубленный анализ размера рынка, конкурентной среды, сегментации рынка, а также основных факторов и тенденций, способствующих росту рынка. ЗАПРОСИТЕ БЕСПЛАТНЫЙ ОБРАЗЕЦ СЕГОДНЯ
будет представлен углубленный анализ размера рынка, конкурентной среды, сегментации рынка, а также основных факторов и тенденций, способствующих росту рынка. ЗАПРОСИТЕ БЕСПЛАТНЫЙ ОБРАЗЕЦ СЕГОДНЯ
Основные типы промышленных роботов в 2018 году
В зависимости от механической конфигурации промышленные роботы можно разделить на шесть основных типов, а именно: шарнирные роботы, декартовы роботы, роботы SCARA, дельта-роботы, полярные роботы и цилиндрические роботы. Помимо механической конфигурации, промышленные роботы также могут быть классифицированы на основе управления движением, управления питанием и физических характеристик.
В этом блоге основное внимание будет уделено основным типам промышленных роботов по конфигурации, их преимуществам и недостаткам, а также областям применения.
Шарнирные роботы
Шарнирные роботы — один из самых популярных типов промышленных роботов. По своей механической конфигурации он напоминает человеческую руку. Рука соединена с основанием скручивающимся соединением. Количество поворотных сочленений, соединяющих звенья в руке, может варьироваться от двух до десяти сочленений, и каждое сочленение обеспечивает дополнительную степень свободы. Стыки могут быть параллельными или ортогональными друг другу. Шарнирные роботы с шестью степенями свободы являются наиболее часто используемыми промышленными роботами, поскольку их конструкция обеспечивает максимальную гибкость.
Количество поворотных сочленений, соединяющих звенья в руке, может варьироваться от двух до десяти сочленений, и каждое сочленение обеспечивает дополнительную степень свободы. Стыки могут быть параллельными или ортогональными друг другу. Шарнирные роботы с шестью степенями свободы являются наиболее часто используемыми промышленными роботами, поскольку их конструкция обеспечивает максимальную гибкость.
Преимущества
- Высокая скорость
- Большая рабочая зона для минимальной площади пола
- Упрощено выравнивание по нескольким плоскостям
Недостатки
- Требуется специальный контроллер робота
- Сложное программирование
- Сложная кинематика
Применение
- Пищевая упаковка
- Дуговая сварка
- Точечная сварка
- Транспортировка материалов
- Обслуживание машин
- Автомобильная сборка
- Производство стальных мостов
- Резка стали
- Работа со стеклом
- Применение в литейном и кузнечном производстве
Скачать отчет о мировом рынке промышленных сварочных роботов 2017-2021 Образец бесплатно
Декартовы роботы
Декартовы роботы также называются прямолинейными или портальными роботами и имеют прямоугольную конфигурацию. Эти типы промышленных роботов имеют три призматических шарнира для обеспечения линейного движения за счет скольжения по трем перпендикулярным осям (X, Y и Z). У них также может быть прикрепленное запястье, позволяющее совершать вращательные движения. Декартовы роботы используются в большинстве промышленных приложений, поскольку они обеспечивают гибкость в своей конфигурации, что делает их подходящими для конкретных приложений.
Эти типы промышленных роботов имеют три призматических шарнира для обеспечения линейного движения за счет скольжения по трем перпендикулярным осям (X, Y и Z). У них также может быть прикрепленное запястье, позволяющее совершать вращательные движения. Декартовы роботы используются в большинстве промышленных приложений, поскольку они обеспечивают гибкость в своей конфигурации, что делает их подходящими для конкретных приложений.
Преимущества
- Обеспечивает высокую точность позиционирования
- Простое управление
- Легко программируется в автономном режиме
- Широкие возможности настройки
- Может выдерживать большие нагрузки
- Меньше стоимости
Недостатки
- Требуется большая рабочая и монтажная площадь
- Комплекс в сборе
- Движение ограничено только одним направлением за раз
Приложение
- Операции захвата и размещения
- Погрузка и разгрузка
- Транспортировка материалов
- Сборка и сборка
- Обращение с ядерными материалами
- Клеевые аппликации
Скачать образец отчета о глобальном рынке промышленных роботов в автомобильной промышленности 2018-2022 гг. выбранная плоскость. Вращающиеся валы расположены вертикально, а концевой эффектор, прикрепленный к плечу, перемещается горизонтально. Роботы SCARA специализируются на боковых перемещениях и в основном используются для сборки. Роботы SCARA могут двигаться быстрее и легче интегрируются, чем цилиндрические и декартовы роботы.
выбранная плоскость. Вращающиеся валы расположены вертикально, а концевой эффектор, прикрепленный к плечу, перемещается горизонтально. Роботы SCARA специализируются на боковых перемещениях и в основном используются для сборки. Роботы SCARA могут двигаться быстрее и легче интегрируются, чем цилиндрические и декартовы роботы.
Преимущества
- Высокая скорость
- Отличная воспроизводимость
- Большое рабочее пространство
Недостатки
- Требуется специальный контроллер робота
- Только для плоских поверхностей
- Трудно программировать в автономном режиме
Приложение
- Сборочное приложение
- Работа с полупроводниковыми пластинами
- Биомедицинские приложения
- Упаковка
- Укладка на поддоны
- Загрузка машины
Получите БЕСПЛАТНЫЙ отчет о мировом рынке упаковочных роботов за 2017–2021 гг.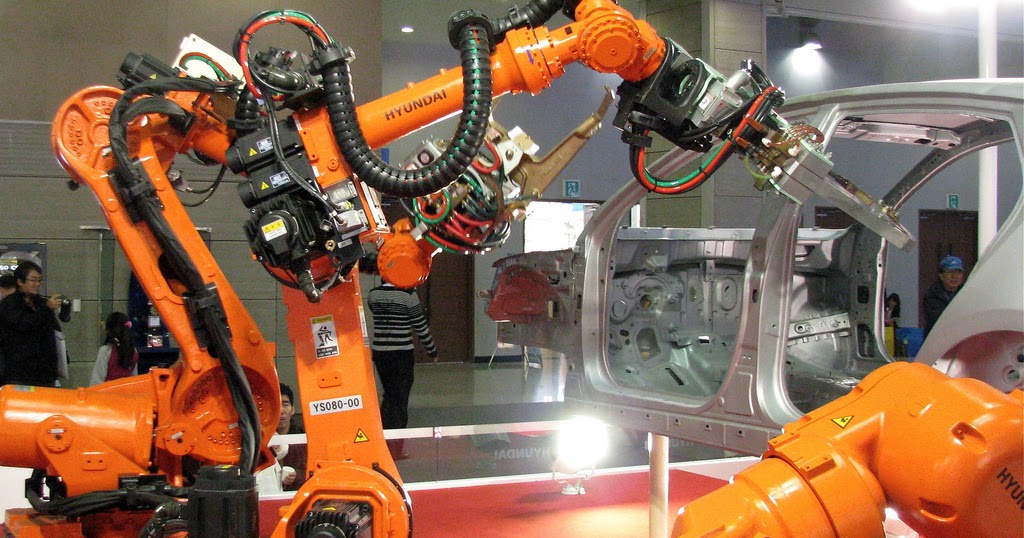 Образец прямо сейчас
Образец прямо сейчас
Дельта-роботы
Дельта-роботы также называются роботами с параллельными соединениями, поскольку они состоят из параллельных соединений, соединенных с общей базой. Благодаря прямому управлению каждым суставом над концевым зажимом положением концевого зажима можно легко управлять с помощью его рычагов, что обеспечивает высокую скорость работы. Дельта-роботы имеют куполообразную рабочую оболочку. Эти роботы обычно используются для быстрого захвата и перемещения товаров.
Преимущества
- Очень высокая скорость
- Высокая точность работы
Недостатки
- Сложность эксплуатации
- Требуется специальный контроллер робота
Применение
- Пищевая промышленность
- Фармацевтическая промышленность
- Электронная промышленность
- Авиасимуляторы
- Автомобильные тренажеры
- Выравнивание оптического волокна
Ознакомьтесь с нашим отчетом о мировом рынке промышленных роботов в отрасли бытовой техники, 2018-2022 гг.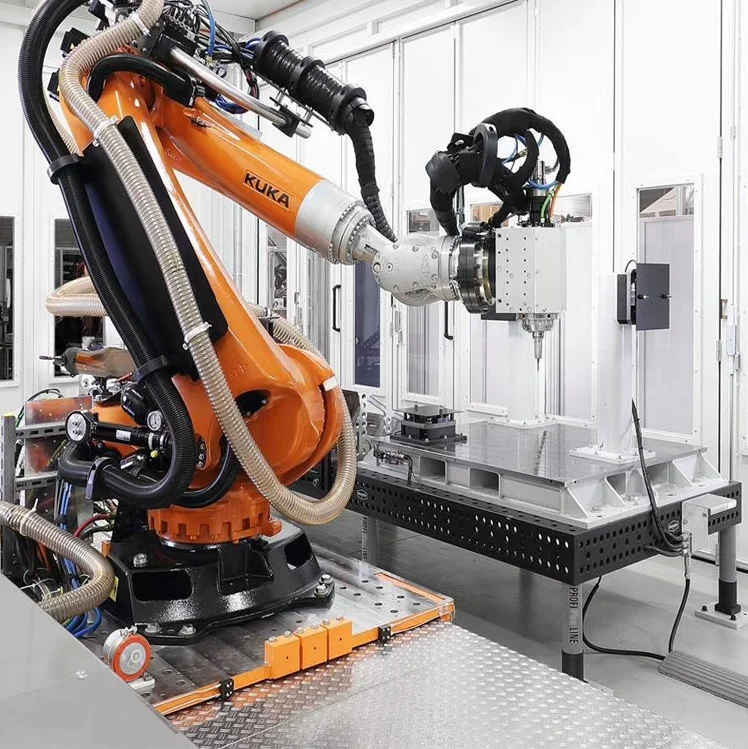 подключение ссылок. Их также называют сферическими роботами, поскольку они имеют сферическую рабочую оболочку, а оси образуют полярную систему координат. Эти роботы имеют центрально вращающийся вал и выдвижную вращающуюся руку. Конфигурация орудийной башни полярных роботов охватывает большой объем пространства, но доступ руки ограничен в пределах ее рабочего пространства.
подключение ссылок. Их также называют сферическими роботами, поскольку они имеют сферическую рабочую оболочку, а оси образуют полярную систему координат. Эти роботы имеют центрально вращающийся вал и выдвижную вращающуюся руку. Конфигурация орудийной башни полярных роботов охватывает большой объем пространства, но доступ руки ограничен в пределах ее рабочего пространства.
Преимущества
- Может охватывать все вокруг
- Может достигать выше или ниже препятствий
- Большой рабочий объем
- Требуется меньше места на полу
Недостатки
- Не может подняться над собой
- Короткий вертикальный вылет
- Низкая точность и повторяемость в направлении вращательного движения
- Требуется сложная система управления
- Вышло из моды и не встречается в новых проектах
Применение
- Литье под давлением
- Работа со стеклом
- Укладка и разборка
- Литье под давлением
- Ковка
- Сварка
- Транспортировка материалов
Скачать отчет о мировом рынке роботов для литья металлов за 2018-2022 гг. Образец БЕСПЛАТНО
Образец БЕСПЛАТНО
Цилиндрические роботы
Цилиндрические роботы имеют как минимум одно вращающееся соединение в основании и как минимум одно призматическое соединение, соединяющее звенья. Эти роботы имеют цилиндрическое рабочее пространство с поворотным валом и выдвижной рукой, которая перемещается вертикально и за счет скольжения. Таким образом, роботы с цилиндрической конфигурацией обеспечивают вертикальное и горизонтальное линейное перемещение наряду с вращательным движением вокруг вертикальной оси. Компактная конструкция конца манипулятора позволяет роботу достигать узких рабочих зон без потери скорости и повторяемости. Он в основном используется в простых приложениях, где материалы подбираются, вращаются и размещаются.
Преимущества
- Простота в эксплуатации и установке
- Минимальная сборка
- Может достигать всего вокруг себя
- Требуется меньше места на полу
- Может нести большую полезную нагрузку
Недостатки
- Нельзя обходить препятствия
- Низкая точность направления вращательного движения
- Вышло из моды и не встречается в новых проектах
Приложение
- Перевозка ЖК-панелей
- Приложения для сборки
- Нанесение покрытий
- Литье под давлением
- Применение в литейном и кузнечном производстве
- Машина для загрузки и разгрузки
Получите БЕСПЛАТНЫЙ образец отчета о мировом рынке полочных роботов за 2018-2022 гг.
Всего комментариев: 0