3Х координатный стол своими руками: Координатный стол для сверлильного станка своими руками
Содержание
Координатный стол своими руками, простой мастер-класс и советы
Перейти к содержанию
Search for:
Главная » Столы » Самодельный
Самодельный
На чтение 8 мин Просмотров 17.8к.
Для правильной эксплуатации сверлильного оборудования необходимо несколько дополнительных приспособлений, которые облегчат работу мастера и увеличат его эффективность. В частности, нужна специальная рабочая поверхность для оснащения станка, повышающая производительность устройства. Хороший координатный стол своими руками сделать не так уж и просто, однако это возможно. Опытный специалист соберет его, хорошо сэкономив деньги на покупке заводского оборудования.
Опытный специалист соберет его, хорошо сэкономив деньги на покупке заводского оборудования.
Содержание
- Преимущества и недостатки самостоятельного изготовления
- Выбор конструкции
- Материалы и механизмы конструктивных элементов
- Основание
- Привод
- Направляющие
- Устройство перемещения
- Пошаговый алгоритм изготовления бытового стола с механическим приводом
- Видео
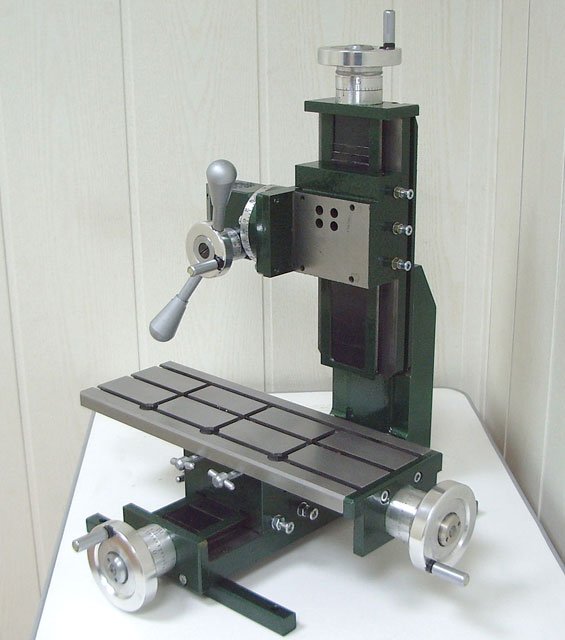
Координатный стол представляет собой дополнительную конструкцию к фрезерному, сверлильному металло- или деревообрабатывающему станку. Благодаря ему можно увеличить производительность оборудования, снизив трудоемкость процесса обработки деталей. Заготовка просто фиксируется на рабочей поверхности и может плавно перемещаться по заданной траектории.
Самодельные координатные столы имеют достоинства:
- небольшие габариты;
- простую конструктивную форму;
- управляются механическим способом;
- используются в кустарном производстве.

Их главное достоинство – экономия денежных средств. Изготовление такой конструкции с нуля обойдется гораздо дешевле, чем покупка заводского манипулятора. Конечно, есть и ряд сложностей при самостоятельном изготовлении. Нужен подходящий чертеж, в соответствии с которым будет задана требуемая траектория движения заготовки. Если чьих-то наработок нет, то придется создавать его самостоятельно, но любая погрешность при черчении схемы даст о себе знать во время работы. Кроме того, стол, сделанный своими руками, подойдет только для мелкого производства, так как простейшие самодельные механизмы изнашиваются гораздо быстрее фабричных.
Для серийного производства деталей и их обработки подойдет только заводская модель координатного стола.
Простая конструктивная формаНебольшие габаритыУправление механическим способомЭкономия денежных средств
Выбор конструкции
При выборе конструкции нужно определиться с ее размерами. Если на координатный стол будет устанавливаться техника, обрабатывающая деталь, то его габариты должны быть учтены обязательно. Если он нужен для фиксации заготовки, то монтируется на станине сверлильного оборудования, а по ширине и длине составит около 35 х 35 см.
Если он нужен для фиксации заготовки, то монтируется на станине сверлильного оборудования, а по ширине и длине составит около 35 х 35 см.
Различают столы и по типу крепления:
- При изготовлении координатного стола своими руками конструкция оснащается механическим креплением. Это наиболее простое решение с точки зрения реализации, но оно имеет ряд недостатков. Например, часто приводит к погрешностям при обработке, и есть риск деформации поверхности изделия.
- Вакуумный крепеж считается лучшим вариантом. С его помощью обеспечивается точное позиционирование заготовки на горизонтальной плоскости. При подаче воздушной струи в зазор между столешницей и обрабатываемой деталью меняется давление в этой области. Благодаря этому можно более качественно произвести обработку (без механических повреждений изделия).
- Крепление под весом заготовки подходит, если при использовании сверлильного станка нужно обработать тяжелые детали. За счет своей массы базируемое изделие остается на том же месте даже при сильном воздействии.

От количества степеней свободы зависит функциональность стола:
- Если она одна, то заготовку можно двигать только в одном направлении (это хороший вариант для обработки плоских изделий).
- При наличии двух степеней становится возможным перемещение заготовки по X и Y координатам.
- Если же их три, то движение детали может осуществляться вверх, вниз и по координате Z.
Если стол изготавливается для домашнего производства и обработки деталей, то использования двух степеней свободы более чем достаточно.
При изготовлении координатного стола своими руками важно определиться, для каких именно целей он будет использоваться. Параметры манипулятора подбираются в соответствии с габаритами, весом и формой будущих заготовок. Для работы с разными деталями из металла и дерева изготавливают сложный многофункциональный механизм. Обычно мастерам на дому хватает возможностей малогабаритного столика с механическим крепежом и двумя степенями свободы.
МеханическоеВакуумноеКрепление под весом заготовки
Материалы и механизмы конструктивных элементов
От материала изделия зависит долговечность конструкции и себестоимость. Следует сразу решить, каким будет стол – стальным, алюминиевым или чугунным. Второй важный шаг – определиться с механизмом управления. Следует также решить, каким должен быть привод – механическим или электрическим. Третий шаг – выбрать направляющие. Это повлияет на точность обработки заготовок.
Основание
Для основы берутся следующие материалы:
- Чугун. Дорогой, тяжелый материал в эксплуатации оказывается очень хрупким, поэтому при производстве сверлильного станка используется крайне редко.
- Сталь. Материал самый высокопрочный и долговечный. Главный его недостаток – это стоимость. Не каждый мастер сможет приобрести его.
- Алюминий. С легким и мягким материалом проще работать. Он не такой дорогой, как сталь. Но для изготовления крупногабаритного стола не подойдет, так как не выдержит тяжелый вес больших заготовок.
 Для создания мини-оборудования это – идеальный вариант.
Для создания мини-оборудования это – идеальный вариант.
Если мастер обрабатывает заготовки из металла, то лучше делать стол из стали или чугуна. Правда, стоит сразу оценить свои затраты: возможно, приобретение готового манипулятора обойдется дешевле, что дорогого железа. Для работы с деревом или пластиком подойдет алюминиевая столешница.
ЧугунСтальАлюминий
Привод
Привод – это механизм управления, с помощью которого координатный стол будет менять свое положение. Он бывает:
- Механическим. Его проще всего изготовить своими руками. Он позволяет существенно снизить себестоимость стола. За основу берется обычная винтовая или ременная передача – этого достаточно для налаживания мелкосерийного производства. Механика не способна обеспечить 100 % точность, и это ее однозначный недостаток.
- Электрическим. Гарантирует нулевую погрешность при выполнении рабочих операций, однако сделать его своими руками очень сложно. Часто встречается в заводских моделях столов.
 Если вблизи с рабочим местом нет собственного источника питания, этот вариант не подойдет.
Если вблизи с рабочим местом нет собственного источника питания, этот вариант не подойдет.
В отдельную категорию координатных столов стоит отнести модели с ЧПУ (числовым программным управлением). Это высокотехнологичное оборудование, которое применяется крупными предприятиями для производства в огромных объемах. Их главные достоинства: хорошая производительность, а также полная или частичная автоматизация процесса. Недостатки: высокая стоимость, для некоторых деталей такой привод не подойдет.
МеханическийЭлектрическийС ЧПУ
Направляющие
Точность обработки заготовки зависит от этих элементов, поэтому их нужно подобрать правильно. Из числа тех, которые можно сделать своими руками, выделяют следующие:
- Рельсовые. Направляющие прямоугольной формы считаются конструктивно более совершенными. При их использовании наблюдаются меньшие потери на трение и недопущение серьезных погрешностей. Есть возможность подключения системы подачи смазочных материалов.
- Цилиндрические.
 Применение направляющих округлой формы чревато большим нагревом из-за трения. Для станков так называемой малой категории они подходят, но придется смазывать все механизмы вручную.
Применение направляющих округлой формы чревато большим нагревом из-за трения. Для станков так называемой малой категории они подходят, но придется смазывать все механизмы вручную.
Направляющие изготавливают с кареткой и подшипниковыми узлами. Использование подшипников скольжения обеспечит высокую точность обработки детали. Применение опоры вала качения уменьшит трение и продлит срок службы манипулятора.
Подшипник качения может привести к появлению заметного люфта, что снижает точность обработки заготовки.
Каретка – это блок направляющих (узел механизма), который непосредственно по ним перемещается. Она может предусматривать увеличенные размеры фланца, что позволяет крепить ее с нижней стороны стола. Если же его нет вообще, то каретку располагают сверху (резьбовым методом).
Рельсовые направляющие и кареткаЦилиндрические
Устройство перемещения
Выбирая устройство перемещения, следует ответить на ряд вопросов:
- Какой должна быть скорость обработки.

- Какая точность позиционирования допустима при выполнении рабочих операций.
- Насколько производительное оборудование будет использоваться.
Ременное устройство перемещения применяется при изготовлении самодельных координатных столов чаще всего. По стоимости оно обходится выгодно, однако имеет ряд недостатков. Ремень достаточно быстро изнашивается, а также может растянуться в ходе эксплуатации. Кроме того, из-за его проскальзывания снижается точность работы подвижного элемента.
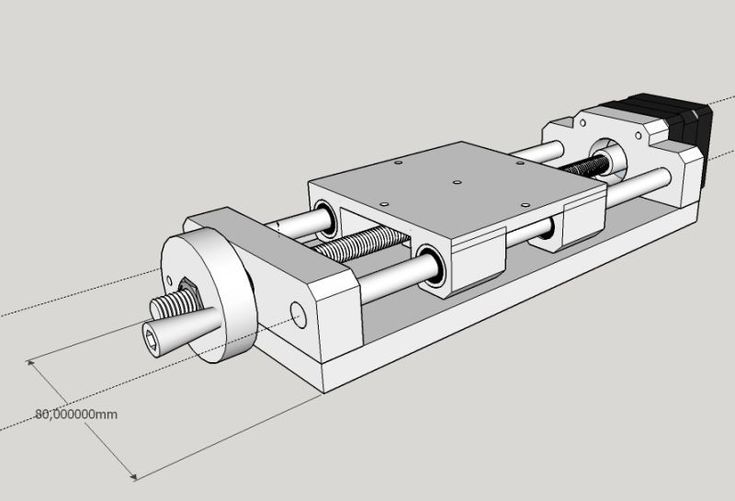
Шарико-винтовая передача – более долговечный и надежный вариант. Несмотря на малые габариты устройства, у него хорошая нагрузочная способность, а перемещение осуществляется равномерно и с большой точностью. Плавный и практически бесшумный ход, а также высокое качество обработки поверхностей – далеко не все преимущества ШВП. Однако у нее есть и некоторые минусы: высокая стоимость и ограничения в скорости вращения винта, если его длина составляет более 150 см.
Зубчато-реечные устройства обеспечивают высокую скорость и точность проводимых работ, выдерживают большие нагрузки, легко поддаются монтажу и надежны в эксплуатации. Погрешность при передаче зубчатой рейки предельно низкая. Если их размер не подошел, то они проходят операцию подгонки.
Погрешность при передаче зубчатой рейки предельно низкая. Если их размер не подошел, то они проходят операцию подгонки.
Ременная передачаШарико-винтоваяЗубчато-реечная
Пошаговый алгоритм изготовления бытового стола с механическим приводом
Чтобы изготовить координатный стол с самым простым, механическим приводом, необходимо следовать инструкции:
- Нужно изготовить центральный узел стола в виде крестовины из металлических профилей 20 х 20 см (толщиной 2 мм). Он должен обеспечивать устойчивость всей конструкции, поэтому все детали свариваются.
- На поверхности готовой крестовины собрать каретки с ходом 94 мм.
- Профили обработать напильником, после чего в него вставить гайки М10.
- На шпильках М10 произвести сборку рукояток с подшипниковым узлом.
- Далее следует сварить два П-образных основания из уголка, а затем собрать всю конструкцию на болтах, которые были вкручены в запрессованные ранее гайки.
- Все узлы, а также подвижные части протереть смазочным материалом.

- Собранный столик нужно прикрепить к станине сверлильного станка.
Чтобы смазанные элементы конструкции были защищены от попадания стружки или других отходов при обработке заготовки, между координатным столом и станком желательно проложить фанеру. Габариты готового манипулятора составят 35 х 35 см, а толщина изделия – 6,5 см. Желательно, чтобы полная длина направляющих была около 30 см.
Изготовить центральный узел стола в виде крестовиныНа поверхности готовой крестовины собрать кареткиПрофили обработать напильником, вставить гайкиНа шпильках произвести сборку рукояток с подшипниковым узломСварить два П-образных основания из уголкаСобрать всю конструкциюВсе узлы, подвижные части протереть смазочным материаломПрикрепить к станине сверлильного станка
Видео
( 2 оценки, среднее 5 из 5 )
Поделится с друзьями
Adblock
detector
Координатный стол своими руками — Автоматика, Челябинск, официальный сайт дилера Delta Electronics
Есть желание собрать и автоматизировать координатный стол своими силами?
Предлагаем Вам ознакомиться с нашими «исследованиями» в этой сфере и примерным набором компонентов конструкции и системы управления (ЧПУ).
Координатный стол – это манипулятор, состоящий из нескольких осей, и предназначенный для перемещения технологической головки (лазер или плазма, фреза или стеклорез) в двух или трех плоскостях. Координатные столы используются в установках для контактной обработки материала (фрезерование, электроэрозия, сварка, гравировка, резка или раскрой материала), и бесконтактной обработки материала (лазер, плазма, нанесение герметиков и т.д.).
Основа координатного стола — рама или каркас, облегченная конструкция подходит для применения в станках без контактной обработки материала (лазер, плазма) или транспортных манипуляторах для небольших нагрузок. Усиленная конструкция может применяться для создания сверлильных и фрезерных станков, а также для манипуляторов, испытывающих большие нагрузки. Аналогично с каркасом элементы конструкции тоже выпускаются в разных исполнениях. Рассмотрим их поподробнее…
Если вы решили разработать конструкцию станка сами, придерживайтесь нескольких простых правил:
- Не экономьте на жесткости.

- В силовом каркасе станка применяйте глухие или прессовые посадки и по возможности сварку, т.к. простое болтовое соединение жесткости не дает. Если конструкция сварная, организуйте каркас фермами.
- При кручении жесткость пропорциональна квадрату размеров сечения, а при изгибе — четвертой степени, т.е. при увеличении размеров сечения детали 2 раза, ее жесткость на изгиб увеличивается 16 раз.
- При выборе материалов предпочтение отдается легким конструкциям. Монолитная алюминиевая деталь жестче, чем равная ей по весу стальная, но оребренная.
В основном, сборка столов выполняется из линейных модулей на основе алюминиевого профиля или профильной трубы и направляющих по которым будут перемещаться узлы стола: портал и каретка.
Направляющие могут быть цилиндрические и рельсовыми, поставляются с каретками со встроенными подшипниками. При выборе направляющих стоит отметить, что основная нагрузка в двигателей подач состоит в преодолении сил трения, потому выбор направляющих определяет мощности приводов подачи. При выбор подшипников качения трение будет меньше, но при этом пострадает точность, так как подшипники скольжения имеют меньший люфт.
При выбор подшипников качения трение будет меньше, но при этом пострадает точность, так как подшипники скольжения имеют меньший люфт.
В качестве передачи, как правило, используются зубчатая рейка, ШВП или армированный зубчатый ремень.
Передача подбирается исходя из требований к системе по нагрузке, точности и скорости перемещения. Шарико-винтовая пара обеспечивает высокую точность позиционирования (6-12 микрон), плавность хода, низкий люфт, однако имеет скоростные ограничения, особенно при длине винта от 1500 мм и более. Посчитать скорость не сложно: сервопривода мощностью до 1 кВт имеют стандартные показатели скорости 3000 об/мин, в пересчете шага винта 10мм (хотя бывают и более тихоходные винты) это 30 метров в минуту или 0,5 м/сек, то есть 3 метра винт преодолеет за 6 секунд. При удешевлении проекта можно ставить передачу винт-гайка, но необходимо обеспечить достаточную смазку.
Пара шестерня-рейка имеет высокую точность перемещения (до 10 микрон) и высокие скоростные характеристики. Дает возможность создания крупногабаритной системы за счет стыковки (наращивания) реек. Недостатком системы является необходимость компенсации люфта в редукторе привода и самой передаче.
Ременная передача самая недорогая и простая в обслуживании, она обеспечивает достаточно высокие скорости перемещения. Ее недостатки — ограничения по ускорению, относительно быстрый износ, невысокая точность и удлинение про приложении нагрузки.
В качестве приводов подачи в таких системах обычно применяются шаговые двигатели постоянного тока и синхронные двигатели (серводвигатели). Шаговые двигатели по сравнению с синхронными имеют более низкие скоростные и динамические характеристики и меньшую мощность, зато и цена их значительно ниже. В системах, не испытывающих высоких динамических нагрузок, допускается применение асинхронных двигателей с обратной связью.
Управление приводом и механизмами координатного стола осуществляется системами ЧПУ. По принципу формирования управляющего сигнала они делятся на аналоговые, импульсные и цифровые. Аналоговые схемы ЧПУ сегодня самые распространенные и широко используются в машиностроении. Тем не менее из-за ограниченного быстродействия их применение не всегда возможно в системах, работающих на высоких скоростях.
Импульсные системы используются для управления шаговыми двигателями или синхронными двигателями, имеющими импульсный вход. По характеристикам они уступают цифровым, но поскольку стоимость таких устройств почти на порядок ниже, их часто используют в бюджетных системах, не требующих особой точности позиционирования и обратной связи.
Современные цифровые системы получают сегодня все большее распространение благодаря широким возможностям обработки сигнала, удобству интерфейса, помехоустойчивости. Они реализуются с использованием стандартных протоколов — Profibus, CAN, Sercos и других. Управляющая программа для систем ЧПУ генерируется вручную либо конвертируется из файлов, подготовленных в специальных программах, таких, как AutoCAD, SolidWork, Компас.
Управляющая программа для систем ЧПУ генерируется вручную либо конвертируется из файлов, подготовленных в специальных программах, таких, как AutoCAD, SolidWork, Компас.
Гибкие кабель-каналы (системы защиты кабеля) — необходимый элемент современных машин и механизмов. Высокие скорости перемещения подвижных частей станков, промышленных манипуляторов, автоматизированных сборочных линий требуют специальных мер по защите движущихся кабелей и шлангов от механических, химических, температурных и иных внешних воздействий.
Щвейцарская компания Kanya предлагает конструкционный алюминиевый профиль высокой точности. Главным конкурентным преимуществом продукции Kanya является удобство монтажа и большой выбор дополнительных элементов. Все соединения в системах алюминиевых профилей Kanya унифицированы и обеспечивают максимально простой, удобный и надежный монтаж. Оригинальные дополнительные элементы — опорные, соединительные, крепежные, защитные, декоративные, специального назначения позволяют одинаково легко собрать как станину станка, каркас промышленной установки или сборочного конвейера, так и выставочный стенд, систему стеллажей, офисное кресло, стол или оконную раму.
Компания Gudel производит достаточно широкий ряд зубчатых реек и шестерней модульного и метрического типа.
Одним из наиболее продвинутых решений для систем линейных перемещений является комплект Alpha Solution от Alpha Getriebebau.
SBC Linear Co., Ltd (Сеул, Корея) – крупнейший азиатский производитель систем и компонентов линейных перемещений.
Сегодня ни один современный станок, ни один механизм, в котором используется подвижная проводка, не обходится без кабельных каналов. Пневмошланги, шланги подачи жидкости, газа или смеси, в том числе высокого давления, силовые и сигнальные кабели — для каждого применения разработаны и широко применяются гибкие кабельные цепи.
Корейская компания CP System Co., Ltd была основана в 1993 году для обеспечения нужд быстрорастущего национального производства компонентов микроэлектроники и полупроводниковой техники современными высококачественными кабель-каналами.
Для производства кабель-каналов CPS используются только качественные, не содержащие вредных примесей, нетоксичные материалы — очищенный полиамид-6, износостойкая резина и стекловолокно. Экологически чистое производство компании CPS сертифицировано по стандартам ISO 9001 и национальным стандартам качества KOR-483-00-01.
SBC производит рельсовые направляющие качения (линейные направляющие) трех типов – общепромышленные (SBG/SBS), миниатюрные (SBM) и для высоких скоростей перемещения (SPG/SPS).
Для систем управления координатными столами применяются контроллеры движения и ЧПУ фирмы Delta Electronics (Тайвань), например DVP-PM, DVP-MC или плата PCI-DMC-A01. Эти контроллеры имеют широкую возможность к адаптации системы управления к различным технологическим задачам. В качестве приводов используются сервопривода фирмы Delta Electronics серии ASDA, обеспечивающие необходимые статические и динамические характеристики. Характеристики данных контроллеров приведены в разделе Каталог продукции. По Вашему желанию предоставим всю самую новую информацию а также референс внедрений, пишите, звоните: (351) 235-20-38, [email protected].
По Вашему желанию предоставим всю самую новую информацию а также референс внедрений, пишите, звоните: (351) 235-20-38, [email protected].
DVP-PM
Специализированный ПЛК блочного типа для управления движением
- 16 точек вводавывода с расширением до 512
- Память программы: 64К шагов
- Память данных: 10 000 слов
- 2-х/3-х осевое позиционирование с линейной, круговой, винтовой интерполяцией
- Два (три) встроенных A/B-фазных дифференциальных выхода с частотой до 500 кГц
- Встроенные RS-232 и RS-485, совместимые с MODBUS ASCII/RTU
- Полная совместимость с модулями расширения DVP-Eh3
- Поддержка G-Code/M-Code (загрузка с помощью программы с персонального компьютера либо с панели оператора Delta Electronics)
- Подключение задающего энкодера (MPG)
- Профиль E-CAM: 2048 точек
Пример программы для контроллера и панели для тестирования загрузки G-кодов.
DMCNET
Модуль для управления позиционированием по коммуникационному интерфейсу
Модуль DMCNET является устройством управления в режиме реального времени сетью из 12 сервоприводов — четыре группы сервоприводов с 3-х координатной интерполяцией каждая. Скорость обмена 1мс, опрос одновременно 768 входов. Благодаря DMCNET в одной системе могут быть объединены различные устройства, например, сервомоторы, линейные двигатели, устройства с дискретными и аналоговыми входами/выходами, шаговые моторы и ручные задающие устройства импульсных команд.
Реализована высокопроизводительная функция контроля – имеется два типа проверок CRC кодов по двум различным каналам, что уменьшает частоту ошибок связи.
Простота электрических соединений и монтажа снижает конечную стоимость системы, а высокая помехоустойчивость модуля повышает стабильность работы всей системы. К тому же, встроенный PROFIBUS интерфейс обеспечивает возможность оперативного контроля работоспособности подключённых устройств.
Быстрое и точное управление даёт возможность обеспечивать такие характеристики как скорость позиционирования 3 м/сек, ускорение до 5g, и разрешение до 0.001 мм.
Простая структура механической части
Использование 64-разрядных вычислений с плавающей запятой и энкодера с разрешением 1280000 импульсов /оборот даёт возможность обеспечить высокую точность работы. Имеется 35 внутренних режимов работы, поддерживаются команды абсолютного и относительного позиционирования. Встроенные функции внутреннего позиционирования, управления скоростью и моментом оказываются востребованными в различном оборудовании, причём их переключение не требует перезапуска системы.
ASDA-B2
Стандартный сервопривод общего назначения
Диапазон мощностей: 0.1 — 3кВт
- Три режима управления: положением, скоростью, моментом. Режим позиционирования осуществляется только по внешнему импульсному сигналу задания, а режимы скорости и момента — как по внутренним параметрам, так и по аналоговым сигналам задания.
- Повышенная точность. Встроенный энкодер на 131 072 имп/об (17 бит), что удовлетворяет широкому кругу применений сервопривода, и гарантирует стабильную работу на низких скоростях. Импульсный вход с частотой до 4Мгц.
- Превосходное подавление вибрации. Встроенная функция автоматического подавления низкочастотной вибрации реализована с помощью двух фильтров, минимизирующих и полностью устраняющих вибрацию исполнительного механизма. Резонансные частоты могут быть отслежены с помощью функции FFT (быстрое преобразование Фурье) программного обеспечения ASDA-A2-Soft, что поможет увеличить эффективность подавления резонанса.
- Превосходные динамические характеристики. Полоса пропускания до 550 Гц. Время изменения скорости двигателя от -3000 до 3000 об/мин составляет 10мс (без нагрузки).
- Эффективное подавление вибрации. Три группы полосовых режекторных фильтров, автоматически минимизирующих и полностью устраняющих вибрацию исполнительного механизма.

- Встроенный цифровой пульт управления. Позволяет быстро сконфигурировать и оперативно вести мониторинг за работой сервопривода.
- Встроенный тормозной резистор. В моделях от 400Вт.
- Встроенный MODBUS. Cвязь с ПК или ПЛК по RS-232 или RS-485 интерфейсам для управления, конфигурирования и мониторинга привода
ASDA-A2
Многофункциональный, высокопроизводительный сервопривод переменного тока
Диапазон мощностей: 0.1 — 7.5 кВт
- Высокая точность. Встроенный энкодер на 1 280 000 имп/об, что удовлетворяет очень деликатным применениям сервопривода, и гарантирует стабильную работу на очень низких скоростях. Поддержка абсолютных энкодеров.
- Высокая динамика. Полоса пропускания до 1 кГц. Время изменения скорости двигателя от -3000 до 3000 об/мин составляет 10мс (без нагрузки).
- Превосходное подавление вибрации.
 Встроенная функция автоматического подавления низкочастотной вибрации реализована с помощью двух фильтров, минимизирующих и полностью устраняющих вибрацию исполнительного механизма. Резонансные частоты могут быть отслежены с помощью функции FFT (быстрое преобразование Фурье) программного обеспечения ASDA-A2-Soft, что поможет увеличить эффективность подавления резонанса.
Встроенная функция автоматического подавления низкочастотной вибрации реализована с помощью двух фильтров, минимизирующих и полностью устраняющих вибрацию исполнительного механизма. Резонансные частоты могут быть отслежены с помощью функции FFT (быстрое преобразование Фурье) программного обеспечения ASDA-A2-Soft, что поможет увеличить эффективность подавления резонанса. - Полностью замкнутый контур позиционирования. Встроенный интерфейс (CN5) для подключения внешнего датчика положения (оптической линейки или энкодера) позволяет создать второй замкнутый контур обратной связи по положению непосредственно исполнительного механизма для задач высокоточного позиционирования.
- Уникальная встроенная функция E-CAM (электронный кулачковый вал). До 720 позиций E-CAM.Плавная интерполяция между позициями может выполняться автоматически.
- Гибкий режим внутреннего позиционирования (Pr). Режим позволяет задать 64 уставки заданных положений.
 Доступно 5 способов управления: 35 видов режимов выхода в исходную позицию, программируемых переходов, режимов записи параметров, скоростных и позиционных значений.
Доступно 5 способов управления: 35 видов режимов выхода в исходную позицию, программируемых переходов, режимов записи параметров, скоростных и позиционных значений. - Функции захвата и сравнения в реальном времени. Способность запоминать мгновенное значение текущей координаты во время движения. Отклик — 5мкс. Способность мгновенной активизации выхода (DO) при достижении предуста-новленных значений координат движения. Отклик — 5мкс.
- Поддержка CANopen. Скорость связи по CANbus — 1Мб/с. Совместимость со стандартом DS301 CANopen
- Компактный, узкий корпус. Корпус новой серии ASDA-A2 уже корпуса предыдущей серии ASDA-A на 40 %. Допускается плотная установка сервоприводов в шкафу. Боковое расстояние между стенками может быть всего 2 мм.
Обработка пространственных данных (3) — Практика
Обработка пространственных данных (3) — PracticeGeoDa на Github
Введение в науку о пространственных данных
Домашняя страница
Скачать
Посмотреть на GitHub
Данные
Документация
Поддерживать
中文
Люк Анселин
1
16.
 09.2020 (обновлено)
09.2020 (обновлено)
- Введение
- Цели
- Покрываемые функции GeoDa
- Цели
- Получение данных с Чикагского портала открытых данных
- Поиск информации
- Загрузка данных
- Выбор наблюдений за заданный период времени
- Загрузка данных
- Преобразование строки в формат даты
- Извлечение месяца и года из даты создания
- Извлечение наблюдений за нужный период времени
- Выбор окончательного списка переменных
- Сохранение таблицы данных
- Окончательная проверка
- Вставка уникального идентификатора
- Создание слоя точек
- Создание слоя точек из координат в таблице
- Информация о проекции
- Точечный слой с использованием X-Y
- Очистка точечного слоя
- Создание слоя точек из координат в таблице
- Файл границ области сообщества
- Извлечение слоя области сообщества
- Базовая карта общественных территорий
- Изменение проекции
- Брошенные автомобили по общественным территориям
- Пространственное соединение — количество точек в области
- Пространственное соединение – идентификатор области для каждой точки
- Объединение новых идентификаторов с исходным набором данных точек
- Предостережение
- Агрегация
- Данные о населении района сообщества
- Таблица данных о населении района
- Объединение данных о населении со слоем области сообщества
- Картографирование брошенных транспортных средств на душу населения
- Брошенные автомобили на душу населения
- Карта квантилей
Введение
В этой лабораторной работе мы применим возможности обработки данных в GeoDa на реалистичном примере, иллюстрирующем ряд проблем, с которыми можно столкнуться на практике. Мы будем использовать портал открытых данных города Чикаго для загрузки данных о брошенных автомобилях. Наша конечная цель — создать простую карту-схему, иллюстрирующую пространственное распределение брошенных автомобилей на душу населения в районах Чикаго в апреле 2020 года9.0115
Мы будем использовать портал открытых данных города Чикаго для загрузки данных о брошенных автомобилях. Наша конечная цель — создать простую карту-схему, иллюстрирующую пространственное распределение брошенных автомобилей на душу населения в районах Чикаго в апреле 2020 года9.0115
Чтобы добиться этого, мы будем использовать функциональные возможности, описанные более подробно в предыдущих двух главах, к которым мы обращаемся за подробностями. Однако эту главу можно читать и отдельно, так как все необходимые операции
объяснил полностью.
Прежде чем мы сможем создать карты, нам потребуется получить доступ к источнику данных, выбрать наблюдения, агрегировать данные, объединить различные файлы и выполнить преобразование переменных, чтобы получить так называемую пространственно интенсивную переменная (брошенные автомобили на душу населения) для картирования.
Задачи
Определить необходимые данные и загрузить их из надлежащего источника, например, с любого портала открытых данных, управляемого Socrata, например,
Портал открытых данных города ЧикагоСоздание таблицы данных из файла в формате csv
Управление форматами переменных, включая форматы даты/времени
Редактировать записи таблицы
Создать новый слой данных из выбранных наблюдений
Преобразование таблицы с координатами точек в точечный слой в GeoDa
Изменение проекции для пространственного слоя
Пространственное соединение
Пространственная агрегация
Объединение таблиц
Рассчитать новые переменные
Создать простую карту квантилей
Покрываемые функции GeoDa
- Файл > Открыть
- диалоговое окно подключения к источнику данных
- Конфигурация входного файла csv
- Файл > Сохранить как
- указать CRS
- Файл > Сохранить выбранное как
- Таблица > Изменить свойства переменных
- Редактирование таблицы
- Сортировка таблицы по переменной
- Редактировать ячейки таблицы
- Таблица > Удалить переменные
- Таблица > Инструмент выделения
- Таблица > Калькулятор
- Таблица > Объединить
- Таблица > Агрегат
- Инструменты > Форма > Точки из таблицы
- Инструменты > Пространственное соединение
- Карта > Карта квантилей
Получение данных с Чикагского портала открытых данных
Наша первая задача — найти информацию о брошенных транспортных средствах на портале данных и загрузить ее в файл, чтобы мы могли манипулировать ею в GeoDa . Предпочтительный формат — файл с разделителями-запятыми или файл csv . Это в основном похожая на электронную таблицу таблица с переменными в виде столбцов и наблюдениями в виде строк.
Предпочтительный формат — файл с разделителями-запятыми или файл csv . Это в основном похожая на электронную таблицу таблица с переменными в виде столбцов и наблюдениями в виде строк.
Загрузка данных
Обратите внимание, что эта таблица данных содержит около 258 000 наблюдений (по состоянию на 23 июня 2020 г. — со временем это число изменится). Под сводкой переменных есть снимок
таблицы и есть несколько вариантов визуализации. Не будем гнаться за теми, а скачаем данные через запятую
файл (csv), выбрав кнопку Export и щелкнув CSV , как показано на рис. 5.
Рисунок 5: Загрузка формата csv
Файл будет загружен на ваш диск. Примечание: это очень большой файл (около 72 МБ), так что это может занять некоторое время!
Теперь вы можете открыть этот файл в электронной таблице, чтобы взглянуть на его содержимое, или, в качестве альтернативы, открыть его в текстовом редакторе или использовать linux
Команда head для проверки нескольких верхних строк. Он довольно громоздкий и здесь не показан.
Он довольно громоздкий и здесь не показан.
Осматривая ячейки, можно выявить много пустых. Кроме того, кодирование не совсем соответствует. Мы справимся с этим, выбрав только те переменные/столбцы, которые нас интересуют, и взяв только подмножество наблюдений за данный период времени, в
для того, чтобы держать вещи управляемыми.
Выбор наблюдений за заданный период времени
Ради этого упражнения мы не хотим рассматривать все наблюдения. Вместо этого предположим, что нас интересует анализ местоположения брошенных автомобилей за определенный период времени, например, за апрель 2020 года, в разгар кризиса COVID в Чикаго. Чтобы добраться до этого момента, нам нужно будет выполнить следующие шаги:
импортировать CSV-файл в
GeoDaпреобразовать отметку даты в правильный формат даты/времени
извлечь год и месяц из формата даты
выбрать те наблюдения для года и месяца, которые мы хотим
оставить только интересующие нас переменные/столбцы
создать новый набор данных с выбранными наблюдениями и переменными
Конечным результатом этого процесса будет таблица данных, сохраненная в устаревшем формате dBase ( dbf ).
Загрузка данных
Первым шагом является загрузка данных из файла csv в GeoDa . После запуска GeoDa ,
Подключиться к источнику данных Должно открыться диалоговое окно.
Затем мы перетаскиваем файл _311_Service_Requests_-_Abandoned_Vehicles.csv_ (или его эквивалент, если вы переименовали файл) в поле Перетащите файлы сюда диалогового окна данных, как показано в предыдущих главах.
Поскольку формат csv представляет собой простой текстовый файл без каких-либо метаданных, для GeoDa , чтобы узнать тип переменных или другие подобные характеристики набора данных. Чтобы установить некоторые простые параметры, появится диалоговое окно CSV File Configuration , как показано на рис. 6.
Рисунок 6: Конфигурация CSV-файла
Программа пытается угадать тип переменных, но в данном случае в основном обрабатывает их как String .
Мы займемся этим позже. На данный момент убедитесь, что первая запись имеет имена полей элемент
На данный момент убедитесь, что первая запись имеет имена полей элемент
установлен на ДА (настройка по умолчанию), а все остальные параметры оставьте без изменений. После нажатия
кнопка OK , таблица данных покажет содержимое файла с количеством наблюдений (258153) в строке состояния
внизу, как на рис. 7. Для наборов данных, загруженных не 23 июня 2020 г., количество наблюдений будет другим. Однако, поскольку мы ограничиваем анализ апрелем 2020 года, эти данные будут одинаковыми, независимо от того, когда будет загружен полный файл (если только данные за апрель не были каким-либо образом обновлены позднее).
Рисунок 7: Содержимое таблицы
Обратите внимание на множество пустых ячеек в таблице, а также на некоторые нестандартные обозначения, такие как ? для переменной Номерной знак первых наблюдений. Как это обычно бывает с общедоступной информацией, загружаемой с порталов открытых данных, полученные файлы далеки от чистоты и требуют значительной предварительной обработки, прежде чем их можно будет использовать для анализа. Этот
Этот
это 80% усилий, направленных на обработку данных , о которых мы упоминали в первой главе.
Преобразование строки в формат даты
Мы хотим выбрать наблюдения за апрель месяц 2020 года. Прежде чем мы сможем создать запрос, нам нужно преобразовать Дата создания во что-то управляемое, по чему мы можем искать. В настоящее время записи представлены в формате строк (иногда также называемом символьным форматом). Мы можем проверить это с помощью параметра Edit Variable Properties в меню Table , вызываемого либо щелчком правой кнопкой мыши,
или выбрав Таблица > Изменить свойства переменной из меню.
Беглый осмотр типа показывает, что Creation Date представляет собой строку . Это не то, что нам нужно, поэтому мы нажимаем на элемент строки и выбираем дату из выпадающего списка, как на рисунке 8.
Рисунок 8: Изменение типа переменной на Date
GeoDa может распознавать различные форматы даты и времени. Полный список доступен с Настройки диалоговое окно, используя
Источники данных вкладка. Если источник данных содержит формат даты или времени, которого нет в списке, его можно добавить через
Диалоговое окно «Настройки» , в котором используются стандартные обозначения года, месяца, дня и т. д. /04/2011 для Дата создания в первой строке теперь заменена правильным форматом даты 2011-04-11, как в
Рисунок 9. Сравните это с записью для Дата завершения , которая все еще находится в старом формате, как 11.01.2011.
Рисунок 9: Дата создания в таблице
Выбор окончательного списка переменных
Наша ближайшая цель — сохранить выбранные наблюдения в виде новой таблицы. Однако, прежде чем мы приступим к этому,
мы хотим удалить некоторые переменные, которые нас действительно не интересуют или которые не содержат полезной информации.
Например, месяц и год имеют одинаковое значение для всех выбранных записей, что не очень
осмысленный. Кроме того, ряд других переменных являются описательными строками, которые не поддаются количественному анализу. К
уменьшите количество переменных, содержащихся в таблице данных, мы будем использовать Таблицу > Удалить
Функция переменных (вызов из меню или правый клик в таблице).
Для нашего анализа мы сохраним только Дата создания , Адрес улицы , Почтовый индекс , Координата X , Координата Y ,
Ward , Police District , Community Area , Latitude и Longitude в качестве переменных. Все остальные переменные будут удалены. в
Удалить переменные диалоговое окно, мы выбираем их и удаляем из таблицы. Полученный набор переменных заголовков должен быть
как на рис.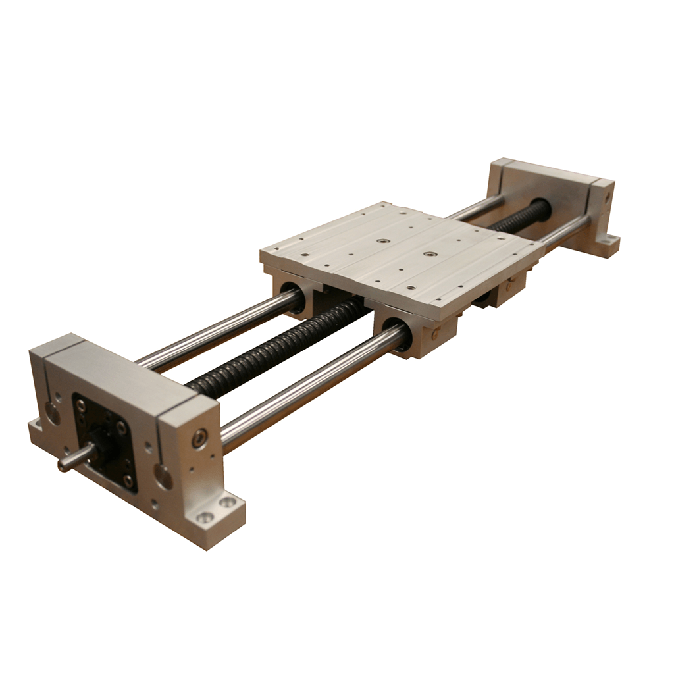 14.
14.
Рисунок 14: Таблица данных с выбранными переменными
Сохранение таблицы данных
До сих пор все операции производились в памяти, и если мы закроем GeoDa , то все
изменения будут потеряны. Чтобы сделать их постоянными, нам нужно сохранить выбранные наблюдения.
в новый файл. Пока мы изначально считываем данные из csv-файла, мы сохраним выбранный
наблюдения как новую таблицу в формате dbf с помощью File > Save Selected As . Далее мы выбираем
Файл базы данных dBase из доступных выходных форматов и укажите Vehicles_April_2020.dbf
как имя файла.
Однако есть
незначительная проблема. Формат файла dbf чрезвычайно требователен к именам переменных (например, нет
более 10 символов, без пробелов) и несколько имен переменных с Чикагского портала открытых данных не соответствуют этому стандарту.
GeoDa помечает неверные имена переменных и предлагает новые имена полей, как показано на рис. 15.
15.
Рисунок 15: Предложение по исправлению имени переменной
Так как предлагаемые имена менее чем интуитивно понятны, мы вручную вводим новые имена переменных, как показано на рис. 16.
Рисунок 16: Предложение по исправлению имени переменной
Теперь мы можем безопасно сохранить файл.
Закрываем текущий проект, выбрав в меню Файл > Закрыть , или выбрав значок Закрыть на панели инструментов (второй значок слева). Обязательно ответьте, что вы , а не хотите сохранить любые изменения, если будет предложено.
Окончательная проверка
Проверяем содержимое нового файла, выбрав значок Открыть и перетащив файл Vehicles_April_2020.dbf в папку Перетащите сюда файлы . Таблица откроется с новым содержимым. Строка состояния сообщает, что имеется 1383 наблюдения. Новые имена переменных отображаются в виде заголовков столбцов, как показано на рис. 17.
17.
Рисунок 17: Таблица данных о новых транспортных средствах
Однако при ближайшем рассмотрении в таблице отсутствуют некоторые важные значения. Сортировка либо по широте , либо по широте
или Долгота покажет 14 наблюдений без этих координат, как на Рисунке 18.
Рисунок 18: Отсутствующие значения широты и долготы
Аналогично, сортировка по X или Y покажет, что 10 наблюдений не имеют таких координат, хотя они
Широта и Долгота , как показано на рисунке 19.
Рисунок 19: Отсутствующие координаты x-y
Что еще более важно, 7 наблюдений не имеют кода для Ward , PoliceD или Comm , как показано на рисунке 20.
Рисунок 20: Отсутствующие коды для области сообщества
Для нашего анализа нам придется либо отказаться от этих наблюдений, либо, в зависимости от вопроса исследования,
найти способ вменить некоторые из пропущенных значений. Учитывая, что нашей конечной целью является создание карты для
Учитывая, что нашей конечной целью является создание карты для
области сообщества, мы хотим убедиться, что как можно больше наблюдений имеют действительный идентификатор для
эта область. Как оказалось, все наблюдения с отсутствующими кодами зон сообщества имеют действительные координаты x-y.
(несмотря на то, что некоторые из них не имеют действительной широты и долготы). Поэтому мы будем использовать координаты x-y для
создать точечный слой. Кроме того, пропущенных значений для x-y меньше, чем для широты-долготы.
Вставка уникального идентификатора
Чтобы упростить последующие операции, которые могут включать объединение разных файлов, мы хотим убедиться, что
каждая точка однозначно идентифицируется. В текущей таблице такого идентификатора нет. 2
Мы добавляем новую переменную PTID как целое число и вставляем ее перед первым столбцом (Таблица > Добавить переменную ).
Затем мы используем крайнюю левую вкладку калькулятора , помеченную Special 9. 0226 и выберите оператор ENUMERATE , как в
0226 и выберите оператор ENUMERATE , как в
Рис. 21.
Рисунок 21: Создание уникального идентификатора для точек
Переменная PTID добавляется в качестве уникального идентификатора для каждого наблюдения, как показано на рис. 22. Примечание.
что значение PTID зависит от порядка наблюдений при его создании, поэтому может немного отличаться
если заказ не оригинал.
Рисунок 22: Таблица данных о новых транспортных средствах
Теперь мы можем сохранить новую таблицу, чтобы заменить текущую (то же имя файла), или использовать Сохранить как , чтобы указать
новое имя файла. Чтобы сохранить файлы отдельными, мы используем последний вариант и создаем новый файл как Vehicles_April_2020_id.dbf .
Создание точечного слоя
До сих пор мы имели дело только с обычной таблицей без использования каких-либо пространственных функций . Однако наша таблица содержит поля с координатами. Таким образом,
Таким образом, GeoDa может превратить таблицу в явный слой пространственных точек, который можно сохранить в различных форматах ГИС. Мы можем тогда
использовать пространственное соединение функциональность для определения области сообщества для тех местоположений (точек), которые имеют пропущенные значения.
Создание слоя точек из координат в таблице
В GeoDa можно легко создать слой точек ГИС из табличных данных, содержащих информацию о координатах.
Процесс запускается из главного меню, т.к.
Инструменты > Форма > Точки из таблицы или выбрав тот же элемент на значке панели инструментов Инструменты .
После вызова функции
появится диалоговое окно, позволяющее указать координаты X и Y.
В нашем примере таблица содержит два набора координат, X и Y , а также
Долгота (горизонтальная или x-координата) и Широта (вертикальная или y-координата).
Учитывая, что все наблюдения с отсутствующими кодами населенных пунктов имеют координаты X-Y, мы будем
используйте последний для создания точечного слоя.
Информация о проекции
Легко создать точечный слой только с координатами, но без
любую проекционную информацию. Однако в результате не будет такой информации, связанной со слоем, которая
проблематична для будущих пространственных манипуляций. Для
например, отсутствие prj (с информацией о проекции для файла формы) создаст
проблемы, когда мы хотим использовать многослойную функцию в GeoDa , чтобы узнать, в какой области сообщества точки
расположены. Чтобы это работало правильно, оба слоя должны находиться в одной и той же проекции .
Для широты и долготы это не проблема, так как эти координаты проецируются на , а не на , что может быть
указывается относительно прямолинейно. CRS (система отсчета координат), которая используется для
относятся к таким слоям EPSG:4326 , с соответствующим определением proj4: 3
+proj=longlat +ellps=WGS84 +datum=WGS84 +no_defs
Это информация, которую необходимо ввести в CRS (формат proj4) в диалоговом окне Сохранить как .
Для координат X-Y это гораздо более сложная задача. Как правило, чрезвычайно трудно (или невозможно)
вывести проекцию из значений координат без дополнительной информации. В нашем случае
Портал открытых данных города Чикаго не содержит таких метаданных. Так что, по сути, мы бы застряли, если бы
мы не знаем, что город традиционно использовал для своих данных систему проекций Illinois State Plane (футы).
Оказывается, это работает, и мы можем ввести информацию CRS для EPSG:3435 :
+proj=tmerc +lat_0=36.66666666666666 +lon_0=-88.33333333333333 +k=0.9999749999999999 +x_0=300000.0000000001 +y_0=0 +ellps=GRS80 +datum=NAD83 +to_meter=0.3048006096012192 +no_defs
The Информация CRS позволит нам создать точечный слой с соответствующей информацией о проекции. Обратите внимание, что
GeoDa требует полной информации CRS, а не только кода EPSG.
Точечный слой, используя X-Y
Мы создаем точечный слой, используя X и Y в качестве координат.
После вызова Tools > Shape > Points from Table , мы выбираем X и Y в диалоговом окне, как
показано на рис. 23.
Рисунок 23: Задание координат точки X-Y
После нажатия OK на экране появится карта точек, показанная на рис. 24. Обратите внимание, что только
Показано 1373 точки, так как 10 из 1383 исходных наблюдений не содержат значения x-y.
Это подтверждено
предупреждением, показанным на рисунке 25, в котором перечислены 90 119 номеров строк наблюдений с отсутствующими координатами.
Хотя эти точки не включены в карту, они все еще являются частью таблицы данных.
Рисунок 24: Карта точек для координат x-y
Рисунок 25: Наблюдения с отсутствующими координатами
Чтобы создать файл с географической информацией, мы выбираем File > Save As и указываем ESRI Shapefile (*.shp) как
тип файла в диалоговом окне. Затем мы прописываем имя файла, например, Vehiclepts_xy для шейп-файла.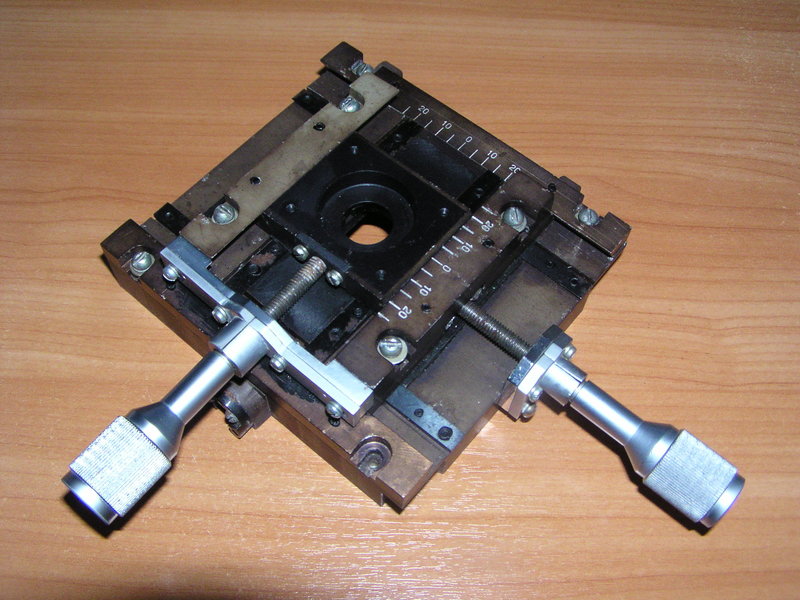 Полный
Полный
Путь к файлу появится в диалоговом окне. Последним шагом является предоставление определения CRS в правильном формате proj4.
Выше мы видели, какой должна быть запись для EPSG:3435 (координаты штата Иллинойс). С этой записью в CRS
box, мы можем сохранить новый файл с соответствующей информацией о проекции.
Очистка точечного слоя
После завершения операции сохранения закрываем текущий проект (не забудьте ответить Нет на запрос о сохранении
географические данные). Затем мы загружаем файл транспортное средствоpts_xy.shp . Получаем ту же базовую карту, что и на рисунке 24,
но мы также продолжаем получать предупреждения. Что случилось?
В то время как карта точек на рисунке 24 отображает только наблюдения с действительными координатами, файл
сохранена создана новая таблица для всех данных, включая те наблюдения без информации о координатах. Чтобы
чтобы создать чистый файл точек, в котором все наблюдения имеют допустимые x и y, мы поступаем следующим образом.
Выбираем все наблюдения в окне карты (убедитесь, что количество выбранных = 1373),
как на рис. 26.
Рисунок 26: Выбранные точки на карте x-y
Затем вместо использования Сохранить как мы вызываем Сохранить выбранное как , что создаст точечный слой
который содержит только действительные (выбранные) наблюдения. Мы указываем имя файла как Vehiclepts_xyc .
Поскольку правильный CRS уже содержится в диалоговом окне, мы можем нажать OK .
После закрытия проекта и загрузки нового файла результирующая базовая карта отображается без предупреждения.
Чикагский университет, Центр изучения пространственных данных – [email protected]↩︎
В оригинале
В таблице есть переменная Service Request Number (в виде строки), но мы удалили ее из наших рабочих данных. ↩︎Подробная информация о проекциях
можно найти на веб-сайте spacereference. org, включая коды CRS для различных форматов.↩︎
org, включая коды CRS для различных форматов.↩︎Чтобы получить фактический вид, как на рис. 36,
нам нужно внести некоторые незначительные изменения. По умолчанию верхний слой будет скрыть нижний слой, если его
непрозрачность уменьшена. Мы делаем это, нажав на зеленую иконку в легенде и выбрав
Цвет заливки для категории . Затем мы устанавливаем непрозрачность на 0%. Наконец, мы меняем цвет заливки для
укажите слой на черный.↩︎
qgis — Как автоматически генерировать координаты новых точечных объектов и добавлять их в таблицу объектов?
спросил
Изменено
3 года, 2 месяца назад
Просмотрено
528 раз
Мне нужно добавить координаты точки в таблицу (поле xcoor и поле ycoor).
Я знал, что это можно сделать с помощью полевого калькулятора .
Сначала я создал новое поле xcoor и использовал выражение $x для получения координаты x. Я установил тип поля как десятичное число (действительное) . Я сделал то же самое для ycoor.
Таблица выглядела так:
Для существующей точки были обновлены поля xcoor и ycoor.
Но когда я попытался вставить новый точечный объект, я не получил его координаты в таблице. Оба поля были пусты для этой функции.
Затем я изменил тип поля, создав новое поле, но виртуальное, с типом double :
И теперь, когда я добавляю новую точку, ее координаты автоматически вставляются в таблицу. Но я не могу понять, почему это возможно с использованием виртуального поля и почему именно в этом случае предлагается двойной тип данных?
Я надеюсь, что кто-то может объяснить это мне.
1
Полевой калькулятор используется для одноразового расчета. Всякий раз, когда вы добавляете объекты, новые записи не будут заполняться новыми координатами.
Всякий раз, когда вы добавляете объекты, новые записи не будут заполняться новыми координатами.
Правильный способ сделать это — в свойствах слоев, настроив «Форму атрибутов». Например, в моем примере я создал шейп-файл с 3 полями; «ID», «XCoord» и «YCoord».
Дважды щелкните имя слоя, чтобы открыть диалоговое окно свойств слоя, затем выберите «Форма атрибута».
Убедитесь, что выбрано «Автогенерация», затем щелкните поле, в котором вы хотите сгенерировать значения (в данном случае — поле «XCoord»).
Нажмите кнопку калькулятора, чтобы открыть «Диалоговое окно выражения». Затем выберите «Geometry» —> прокрутите вниз, пока не найдете «$x», а затем дважды щелкните . Нажмите «ОК».
Повторите ту же операцию для «Ycoord» и выберите «$y».
При создании новых геометрий координаты генерируются и добавляются в соответствующие поля автоматически.
Я бы использовал этот метод; Я надеюсь, что это будет тренировка для вас, а также.
Всего комментариев: 0