Agv робот: AGV робот для склада и производства
Содержание
AGV робот для склада и производства
Описание
AGV робот-тележка — автоматически управляемый транспорт (AGV — Automatic Guided Vechicle) — перевозчик с электрическим мотором, который перемещает грузы по заданному маршруту, который строится заранее системой (RMS — Robotic Management System).
Благодаря тому, что платформа является автономной. То для ее управления не нужен человек. AGV оснащена нужными для навигации сенсорами и датчиками для осуществления безопасного перемещения. AGV используется в местах, где много работников, а также на площадках с небезопасными для человека средами.
AGV разделяется на виды и может выступать в роли буксировщика, который цепляет вспомогательные телеги с грузом (деталями) и перевозит их. AGV может приподнимать на себе мобильные стеллаж или тележки, подъезжая под них. В зависимости от требований клиента подбираются разные типы AGV, а также программируются различные шаблоны поведения.
AGV роботы могут:
- двигаться по заранее заданному маршруту с разными направлениями
- перемещаться с той же скоростью, что и у конвейера/сборочной линии
- притормаживать и ехать медленнее в заданных точках, либо останавливаться и ожидать команды на дальнейшее перемещение (например, ожидать, пока на него будет погружен товар/деталь)
- загружать и выгружать грузы
- «общаться» между собой благодаря единому центру управления роботами, не прибегая к управлению оператором.

- создавать карту пространства помещения для дальнейшего перемещения в нем
- определять препятствия и останавливаться при их появлении
В состав
AGV обычно входят:
- электромоторы и колесная база, осуществляющие перемещение
- герметично закрытые аккумуляторные батареи, что позволяет их использование в закрытых помещениях, отдельное помещение для зарядки не требуется.
- бортовой компьютер, управляющий роботом
- набор систем безопасности в виде звуковых, световых, лазерных датчиков
- Wi-Fi модуль для обеспечения беспроводной связи
- станция управления для обеспечения работы нескольких AGV и синхронизацией действий с WMS/ERP системами
- клавиши управления роботом для выключения, перезагрузки, переключения в ручной режим перемещения с пульта управления
- блок для сканирования
 Radio Frequency IDentification, радиочастотная идентификация) — способ автоматической идентификации, который позволяет моментально считать радио-метку (обычно она представлено в виде наклейки). Система состоит из считывателей, меток и программного обеспечения.»>RFID меток
Radio Frequency IDentification, радиочастотная идентификация) — способ автоматической идентификации, который позволяет моментально считать радио-метку (обычно она представлено в виде наклейки). Система состоит из считывателей, меток и программного обеспечения.»>RFID меток
Где используются
AGV
Широкое применение нашли при выполнении логистических операций, когда необходимо перевезти груз (коробки, детали) из точки А (склад) в точку Б (место упаковки). На заводах по сборке автомобилей AGV доставляют к сборочной линии запчасти. На складе грузы перемещаются к точке комплектования заказа или непосредственно к воротам, где уже ожидает автогрузовик. В средах, где присутствие человека может навредить его здоровью. Возможен сценарий использования, когда AGV перемещается между стеллажами, помогая сборщику комплектовать заказ.
Достоинства
AGV
- Уменьшение влияния человеческого фактора
- Применение роботов в небезопасных средах
- Повышение уровня работы сотрудника, уменьшая нагрузки на организм
- Минимальные затраты в случае изменения конфигурации маршрута
- Техническая поддержка
Виды
AGV
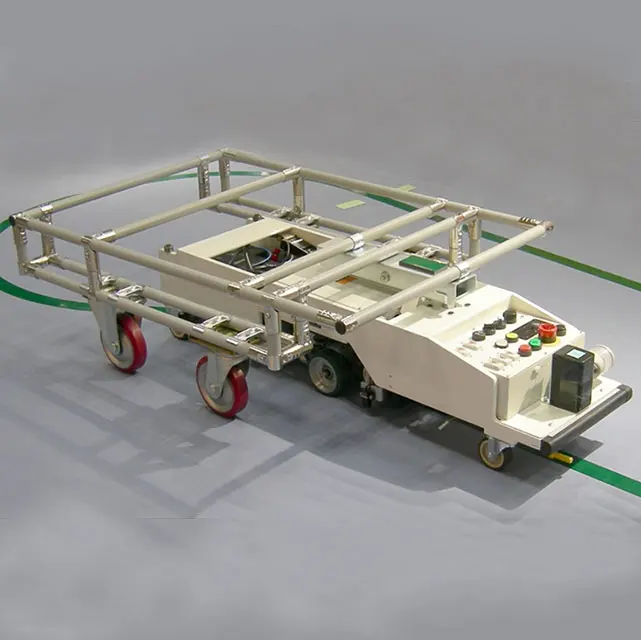
Платформенный AGV содержит платформенную часть для перемещения на себе грузов, может содержать рольганг для совместной работы с конвейерной линией. Роботы для перемещения автомобилей могут быть изготовлены на заказ.
Вилочный AGV предназначен для перемещения паллет как в одной плоскости (не поднимая из выше 10 см), так и для их перемещения к нужному месту и подъема на высоту до 3х метров.
AGV буксир перемещает по заданному маршруту тележки-платформы, цепляя их в сцепку.
AGV туннельного вида подъезжает под тележку, цепляет ее за пазы тележки, выдвигая свой шток, после перемещения шток опускается, роботы выезжает из-под тележки, оставляя ее на нужном месте.
Принцип работы
Как работает
AGV
AGV является другим классом устройств, чем электротележки, так как исключается человеческий фактор, благодаря заранее простроенному маршруту. Робот оснащен дополнительными механизмами, исключающими помощь человека для погрузки на него предметов.
AGV перемещается по заданному маршруту, а запуск его движения стимулируется определенным явлением (начался рабочий день, появился требуемый для перемещения предмет, сотрудник нажал на кнопку и так далее).
Как AGV работают на складе Nissan
Пока робот перемещается, в процессе он может делать остановки, прицеплять к себе груз, буксировать его и другое. Тележка оснащена звуковыми и световыми сигналами, а также лазерным радаром для обеспечения безопасности. Если на пути следования обнаружилось препятствие, робот останавливает ход, издает сигнал, отправляет уведомление в управляющую систему.
Виды навигации
AGV
Виды навигации AGV
- Штробление полов с целью укладки в канавки проводов, на основе электромагнитной индукции робот получает электропитание двигается вдоль них, используя как маршрут.
 Плюсом является отсутствие необходимости использовать аккумуляторы, а как следствие их заряжать, однако минусом является отсутствие гибкости при изменении маршрутов.
Плюсом является отсутствие необходимости использовать аккумуляторы, а как следствие их заряжать, однако минусом является отсутствие гибкости при изменении маршрутов. - Перемещение вдоль магнитной ленты, наклеиваемой на пол, что не препятствует движению по ней других транспортных средств. Плюсом является простота монтажа и доступность по цене, можно создавать разные виды маршрутов (повороты, остановки и так далее). К минусам относится то, что лента со временем стирается и ее необходимо подклеивать.
- Перемещение по наклеенным на пол QR-меткам, сканируемым камерой AGV, находящейся снизу робота. К плюсам можно отнести бюджетность решения. К минусам также меньшую, чем у линий изнашиваемость, обеспеченную использованием ультрафиолетовой печати на пластике, а также на тем, что на такие метке меньше наезжает транспорт (зона с роботами расположена на выделенном участке).

- Навигация на основе инерциальной системы, когда метки не требуются, используются показатели с моторов, показатели положения в пространстве.
- Навигация на основе лазерного радара – лидара. Используются дополнительные отражатели, выставленные по периметру.
Робот-тележка AGV — AGVs — Konecranes
Добавить в папку «Избранное»
Добавить к сравнению
Более подробная информация на сайте Konecranes
Характеристики
- Спецификации
- AGV, для контейнеров
Описание
Мы предлагаем широкий ассортимент терминальных транспортных средств Konecranes Gottwald. К ним относятся беспилотные автоматизированные машины для перевозки контейнеров, или автоматизированные управляемые машины (AGV), которые используются для быстрой и экономичной транспортировки контейнеров между причалом и контейнерной площадкой. Konecranes также поставляет программное обеспечение для управления и навигации AGV. Автопогрузчики Konecranes AGV и Lift AGV теперь доступны с технологией литий-ионных батарей.
Основные характеристики:
Конструкция в виде AGV или Lift AGV с аккумуляторным или дизель-электрическим приводом
Грузоподъемность 70 тонн
Точная последовательность «по плану» с помощью компьютерной системы управления
Точное управление с помощью управляющего и навигационного программного обеспечения и транспондеров в дорожном покрытии терминала
Точность позиционирования до +/- 25 мм
Простое управление целым парком машин
Аккумуляторные электроприводы для нулевых выбросов выхлопных газов в терминале
Автоматизированное простое управление
Полностью автоматизированное, точное и быстрое управление
Перевозка 20, 40 и 45-футовых контейнеров
Компьютерная система управления обеспечивает точную последовательность действий в соответствии с планом
Движение вперед, назад и в сторону
Полностью автоматизированная точная и полностью автоматизированная замена батарей
Точный контроль и регистрация данных (транспортные задания) с помощью управляющего и навигационного программного обеспечения и транспондеров, встроенных в дорожное покрытие терминала
Разделение процессов транспортировки и хранения
Лифт AGV для развязки процессов транспортировки и хранения контейнеров
Контейнеры автоматически размещаются или забираются в зоне перемещения крана-штабелера
Помогает оптимизировать размер флота благодаря более эффективному использованию мощностей
Повышенная экологическая эффективность
—
Это автоматический перевод. (просмотреть оригинал на английском языке)
(просмотреть оригинал на английском языке)
Каталоги
Konecranes Container LIft Trucks brochure
24 Страницы
Shipyard Cranes
16 Страницы
Steel Melt Shop Cranes
12 Страницы
Более подробная информация на сайте Konecranes
Другие изделия Konecranes
Container Handling Equipment
Посмотреть всю продукцию Konecranes
* Цены указаны без учета налогов, без стоимости доставки, без учета таможенных пошлин и не включают в себя дополнительные расходы, связанные с установкой или вводом в эксплуатацию. Цены являются ориентировочными и могут меняться в зависимости от страны, цен на сырьевые товары и валютных курсов.
AGV против AMR. Правда. Что вы должны купить? Различия? За и против?
AGV против AMR? Что лучше? Продаю оба … Оба нравятся ❤. Меня не волнует, будут ли они AMR или AGV . .. Меня волнуют только требования проекта . В этой статье я объясняю свое объективное мнение о различиях между AGV и AMR.
.. Меня волнуют только требования проекта . В этой статье я объясняю свое объективное мнение о различиях между AGV и AMR.
В чем разница между AGV и AMR?
AMR означает автономный мобильный робот , а AGV расшифровывается как Automated Guided Vehicle . Итак, Автономное и Мобильное против Автоматизированного и Управляемого.
AMR — это автономный мобильный робот с естественной навигацией , способный переопределять маршруты или пути и избегать препятствий. Для AMR не требуются предопределенные фиксированные пути. Он может определять свой маршрут на лету. При обнаружении препятствия AMR корректирует свой путь, чтобы обойти объект.
По сути, естественная навигация означает, что робот наносит на карту окружающую среду и может перемещаться и локализовать себя, просто «наблюдая» за этой средой. На самом деле «тема автономной навигации» не так проста, если вы хотите узнать больше о методах естественной навигации, не пропустите эту статью: SLAM AGV Navigation.
На самом деле «тема автономной навигации» не так проста, если вы хотите узнать больше о методах естественной навигации, не пропустите эту статью: SLAM AGV Navigation.
Вместо этого AGV перемещается автоматически по заданным дорожкам (физическим или виртуальным, магнитной ленте, триангуляции с отражателями и т. д.). AGV не отклонятся от этого пути. Когда датчики безопасности AGV обнаруживают препятствие, AGV останавливается и ждет, пока препятствие не будет удалено.
Следующие видеоролики показывают, как ведут себя автомобили. В этом видео вы можете увидеть AMR с бесплатной автономной навигацией:
Платформа Kollmorgen NDC S разработана для компаний, которые хотят построить AMR , отвечающий потребностям их клиентов. |
 Kollmorgen предоставляет программную платформу для транспортных средств на основе SLAM, которые работают в динамичных условиях и могут быть установлены в течение нескольких часов без предварительного обучения.
Kollmorgen предоставляет программную платформу для транспортных средств на основе SLAM, которые работают в динамичных условиях и могут быть установлены в течение нескольких часов без предварительного обучения.
0007
Подводя итог, можно сказать, что основное различие между автоматизированными транспортными средствами и автономными мобильными роботами – это «автономная» навигация.
Автономная навигация предполагает определенные дополнительные различия , которые я подробно опишу в этой таблице и объясню в следующих главах. Продолжайте читать, чтобы понять эту таблицу и открыть 90 003 различий между AMR и AGV одно за другим.
| AMR против AGV Сравнение Таблица | Автоматизированный гиду и т. д. Магнитная лента, лазерное наведение и т. д. д. Магнитная лента, лазерное наведение и т. д. | Естественная безрельсовая навигация. Все измерения выполняются на борту. Определяет среду на лету. |
| Препятствия | Препятствия останавливают AGV | AMR объезжает препятствия и находит альтернативный маршрут. |
| Гибкость | Добавлять или изменять маршруты или пункты назначения сложнее. | Легко переназначить и определить новые пункты назначения и цели |
| Стоимость транспортного средства | AGV, как правило, проще и дешевле, чем AMR. | AMR дороже из-за более точных датчиков и более сложного программного обеспечения управления. |
| Стоимость: платформа 1 тонна дифференциального привода | $ 20 000 (с магнитной навигацией) | $ 40 000 (с навигацией SLAM) |
Стоимость: падл Джек 1 Тонн. | 50 000 долларов США (с навигацией SLAM) | |
| Стоимость установки и ввода в эксплуатацию | Более сложный, требует больше времени и требует затрат на инфраструктуру (магнитная лента, провода, отражатели и т. д.) | Быстрая и простая установка. Более низкая стоимость по сравнению с AGV. |
| Надежность | AGV придерживаются пути. AGV более надежны, чем AMR. | Естественная навигация более чувствительна к изменениям окружающей среды. Робот может потерять свою позицию. |
| Safety | B56.5-2019 in US / ISO 3691-4:2020 in UE | ANSI/RIA R15.08-1-2020 |
- Share
- Tweet
- Доля
- Поделиться
- Электронная почта
- Поделиться
💡 Остерегайтесь тех, кто утверждает, что AMR (или AGV) являются наиболее эффективными и единственными! Вероятно, они предлагают вам «свое» решение .
Я рекомендую загрузить технический документ agvnetwork на тему «AGV vs AMR», чтобы вы могли сделать собственные выводы. Естественно… это бесплатно… 😎
| Нажмите здесь, чтобы загрузить технический документ
AMR или AGV? Что лучше?Скорее всего, вы слышали об AMR или Autonomous Mobile Robots . Вы, несомненно, слышали, что лучше, чем AGV , поскольку они более универсальны, проще в развертывании, менее дороги, совместны и умнее.
Это правда? Роботы AMR превосходят AGV? Во многих случаях ДА … , но не всегда.
В любом случае, позвольте мне сказать вам кое-что . AMR — это единственное будущее (пока).
Давайте попробуем определить, когда лучше выбрать AMR или AGV.
Стоимость: AGV дороже, чем AMR?
Если сравнивать экономические преимущества AMR с преимуществами AGV , я должен сказать, что у меня была возможность предложить альтернативные проекты, использующие обе технологии, и, как обычно, все зависит от области применения… ..
Да ладно… Наверное, вы думаете: «Я хотел получить ответы, а вы говорите только одно: это зависит от обстоятельств?.
Во многом это зависит от типа мобильного робота и типа навигационной системы .
AMR требуют все более и более эффективных датчиков для навигации. Более того, им нужны хороших контроллера, продвинутых алгоритма, способных управлять всей информацией, полученной от этих датчиков.
Этот повышенный спрос на датчики и обработку требует более дорогого транспортного средства . (это имеет смысл).
Если бы у нас были сложные транспортные средства с лазерным наведением с лазерной навигацией, вероятно, разница в цене не имела бы значения, поскольку LGV также требуют таких же возможностей восприятия и обработки.
Итак, если вы сравниваете вилочный погрузчик AGV с лазерной навигацией с вилочным погрузчиком amr с каким-либо типом навигации SLAM.
При сравнении АМРС с АГВ с магнитной навигацией , однако, ситуация меняется.
Если бы у нас была небольшая платформа AMR , которая работает с такой хорошей естественной навигацией, автомобиль мог бы стоить около 30 000 или 40 000 долларов . Вы можете найти такой AGV с магнитной навигацией примерно за 15 000 долларов (даже меньше).
Если для вашего проекта требуется несколько транспортных средств, зазор очень важен.
Продавец AMR скажет, что установка AMR быстрее и дешевле из-за отсутствия необходимости в оборудовании системы наведения.
Действительно, монтаж и ввод в эксплуатацию АМР быстрее и дешевле.
Если для вашего проекта требуется очень длинных маршрута с множеством различных пунктов назначения или вам нужны маршруты с множеством вариантов , AMR становятся более удобными по сравнению с другими технологиями, такими как магнитная или лазерная навигация.
Если ваш проект не требует такой сложной установки, в конце концов, AMR обходятся дороже.
Я пытаюсь обобщить эти понятия в этой статье стоимость AGV оценка. Сколько стоит автоматизированное транспортное средство? и этот технический документ… много вещей, которые нужно принять во внимание.
9 Кроме того, если вы хотите получить расчет стоимости проекта 0 4 0 0 0 Вы можете скачать Калькулятор стоимости EXCEL AGV, который учитывает все аспекты стоимости обеих технологий, обеспечивая ориентировочный уровень инвестиций.
Имя пользователя Пароль Запомнить меня
Безопасность.
Извините. Если кто-то говорит вам «AMR безопаснее, чем AGV», лжет или не знает, о чем говорит.
Я читал в Интернете сообщения о том, что AMR безопаснее, чем AGV. Разумеется, эти посты публикуют компании продажа или производство AMR .
Ни в коем случае. Не согласен. Оба безопасны. Я бы сказал, что оба ДОЛЖНЫ быть безопасными одинаково.
AGV рассчитаны на четко определенные стандарты безопасности B56.5-2019 в США и ISO 3691-4:2020 в ЕС.
Ознакомьтесь с этой статьей для получения дополнительной и важной информации о системе безопасности AGV. Это очень важно, если вы думаете о внедрении системы AGV: Понимание Системы безопасности АГВ.
и снова … не пропустите WhitePaper’s Agvnetwor.
Некоторые AMR находятся между AGV и промышленными роботами (когда они несут роботизированный манипулятор или что-то подобное). По этой причине был определен новый стандарт безопасности R15.08 , который устанавливает требования безопасности для промышленных мобильных роботов и робототехнических систем.
R15.08 закрывает существующие пробелы между стандартами R15.06 (безопасность промышленных роботов) и B56.5 (безопасность промышленных роботов).
В этой статье я объясню, каковы основные элементы R15.08: Ansi/Ria r15.08-1-2020. Если вы думаете о производстве или покупке AGV или AMR… вам следует знать эти стандарты.
Автор Альфредо Пастор Телла (редактор agvnetwork). Следуйте за мной в LinkedIn… давайте создадим сообщество мобильных роботов, чтобы обсудить и узнать об этих выдающихся системах.
Автоматизированные управляемые транспортные средства с естественной навигациейПоэтапная «бесплатная» или естественная навигация с функциями входит в AGV (или Автономные мобильные роботы, AMR ) промышленность.
Концепция проста, «бесплатная» навигация, то есть навигация без необходимости установки аппаратных средств, таких как провода, ленты, отражатели.
В этой статье я попытаюсь объяснить вам, как работают автоматические управляемые транспортные средства со свободной навигацией, и некоторые интересные концепции, такие как SLAM Navigation concept ?
Открытие природных объектов Навигация
Что такое естественная навигация для AGV?
В целом, автоматические управляемые транспортные средства с естественной навигацией способны перемещаться автономно, определяя и картографируя окружающую местность.
Беспилотные роботы с естественной навигацией вместо того, чтобы следовать магнитной ленте на полу (или выполнять лазерную триангуляцию отражателя), могут, например, идентифицировать определенную стену и перемещаться на заданном расстоянии от нее.
Фактически, существует несколько технологий под эгидой «естественной навигации» .
Наиболее типичная технология основана на распознавании контуров (на основе контуров) . Транспортные средства с этой технологией перемещаются, идентифицируя и картографируя окружающую местность с помощью различных типов датчиков, используемых мобильными роботами.
Важно понимать, что самоуправляемые роботы, выполняющие естественную навигацию, называются автономными мобильными роботами (AMR), а не автоматизированными управляемыми транспортными средствами.
Кстати, не пропустите мою статью о различиях между АГВС и АМРС. В противном случае вы можете зарегистрироваться и скачать этот технический документ, полный полезной информации.
Ok, let’s go ahead…
Что такое технология на основе SLAM? Что такое техника навигации SLAM?
Термин SLAM является аббревиатурой от Одновременная локализация и сопоставление .
Не волнуйтесь, я объясню, как работают роботы со слэм-навигацией.
Навигация на основе SLAM шаг за шагом входит в индустрию AGV. На самом деле, я убежден, что технология SLAM рано или поздно заменит другие традиционные методы навигации, такие как навигация по магнитной ленте.
По сути, мобильный робот составляет карту окружающей среды с помощью различных типов датчиков , таких как лидары или видеокамеры, и способен локализовать себя на этой карте.
Робот создает «теоретическую» карту, а затем сравнивает ее с «реальной картой», которую он «видит» во время бега.
Это отличное решение, но среда должна рассчитывать на четко определенные спецификации .
Есть хорошие поставщики навигационного программного обеспечения AGV, разрабатывающего и продающего Natural Navigation Technologies .
Есть два ключевых момента, которые нужно преодолеть, прежде чем мы увидим SLAM повсюду:
В этих вкладках вы можете найти некоторых из наиболее важных поставщиков навигационного программного обеспечения AGV для индустрии мобильных роботов… не стесняйтесь и свяжитесь с ними для получения дополнительной информации.
Что делает программное обеспечение SLAM для одновременной локализации и картирования?
SLAM в основном состоит из:
Все эти расчеты задаются сложными алгоритмами, которые могут варьироваться в зависимости от разработчика.
По этой причине SLAM — это скорее «концепция» , чем отдельный алгоритм или метод.
Как беспилотный робот SLAM отображает свое окружение?
Существует несколько методов и датчиков для картирования или отслеживания окружающей среды и оценки положения мобильного робота. Каждый производитель использует один или комбинацию из следующих.
Датчики LiDAR
Датчики LiDAR широко используются в индустрии мобильных роботов. Сканер LiDAR измеряет расстояние до цели, освещая цель лазерным светом и измеряя отраженный свет датчиком.
Различия во времени возврата лазера и длинах волн могут быть использованы для создания цифровых 2-D или 3-D изображений цели.
The LiDAR emits laser beams while running and the coming back info is used to map the environment and identify the Положение АГВ.
Существует несколько типов датчиков LiDAR, сканирующих лидаров, твердотельных лидаров и т. д.
Если вы хотите узнать больше о датчиках и технологиях LiDAR, вы не можете пропустить этот записанный веб-семинар: Последние тенденции в применении лидаров для мобильных роботов от БОЛЬНОЙ.
SonarAGVS также может использовать Sonars для навигации. Гидролокаторы устарели по сравнению с технологией LiDAR, но они дешевле. Их измерения хуже, чем у лазерных сканеров. Навигация с визуальным наведением для транспортных средств с визуальным наведением (VGV)
С визуальным наведением Транспортные средства часто используют стереофонические или триклопсные системы для измерения расстояний. Использование зрения напоминает то, как люди смотрят на мир, и, таким образом, может быть более привлекательным интуитивно, чем лазер или сонар.
Основная проблема заключается в том, что технология зрения предоставляет огромное количество ценной информации , который трудно обрабатывать, требуя сложных и продвинутых алгоритмов. Конечно, технологии и вычислительные мощности совершенствуются, поэтому технология Vision Guided становится проще, надежнее и доступнее. Но как мобильный робот узнает, где «это»?
Существует три основных стратегии «сопоставления» информации.
Первая стратегия: сканирование за сканированием
Данные, полученные от датчиков (например, LiDAR), используются для оценки положения AGV между двумя последовательными сканированиями.
В результате мы обновили и накопили позиционирование автомобиля.
Этот метод не зависит от какой-либо предопределенной карты, поэтому он очень полезен, когда карта отсутствует или для создания исходной карты.
Основная проблема в том, что ошибка со временем увеличивается без возможности ее исправить.
Вторая стратегия: сопоставление сканирования с картой
Система управления или в мозгу робота.
Эта стратегия не накапливает ошибки вовремя, но может создать много проблем в случае, если сканируемая среда не соответствует теоретической карте . Например, в хаотичной производственной среде.
Третья стратегия: Комбинация с одометрией
Ни одна из этих стратегий не является полностью удовлетворительной и надежной, поэтому возникает третья стратегия: Комбинация сканирования в сканирование, сканирования в карту и инерциальных и одометрических данных робота для преодоления проблем и обеспечения точной и надежной работы в реальных условиях и приложениях.
Важным аспектом SLAM является сочетание с данными одометрии (ускорение, кодировщики колес, гироскоп и т.
Робот с автономным управлением смешивает всю информацию, полученную от измеряемой среды, теоретической среды и собственных датчиков, чтобы обеспечить максимально точное позиционирование.
Когда целесообразно выбирать AGV с естественной навигацией?
По моему мнению, Natural Navigation заменит другие типы навигации, такие как магнитная навигация, оптическая навигация и т.
Главная забота сегодня о Природных технологиях его надежность в переменных средах таких производственных линий, где происходит непрерывное движение людей, обслуживаемых средств, ящиков, поддонов и т. д. В этих условиях мобильный робот с естественной навигацией может не найти свое местонахождение, потому что контуры постоянно меняются.
По этой причине Natural Naviagtion является отличным решением для мобильных роботов , когда у вас есть четко определенные профили и среды с фиксированными структурами, такими как стены, колонны.
В общем, в любой среде с низким уровнем «путаницы». | |||||||||||||||||||||||||||||
 Однажды будут только AMR. Продолжайте читать, чтобы понять эту таблицу и открыть 90 003 различий между AMR и AGV одно за другим.
Однажды будут только AMR. Продолжайте читать, чтобы понять эту таблицу и открыть 90 003 различий между AMR и AGV одно за другим.  .. извините!
.. извините!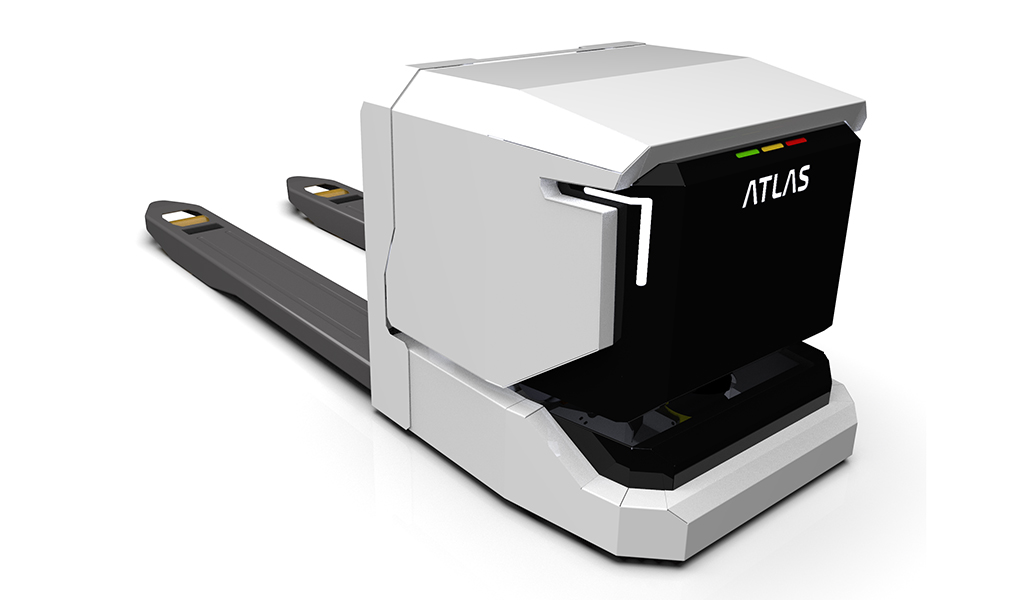 .. цена будет более или менее одинаковой.
.. цена будет более или менее одинаковой.
 Являются ли AMR более безопасными, чем AGV?
Являются ли AMR более безопасными, чем AGV? Запомнить меня
Запомнить меня 5-2019
5-2019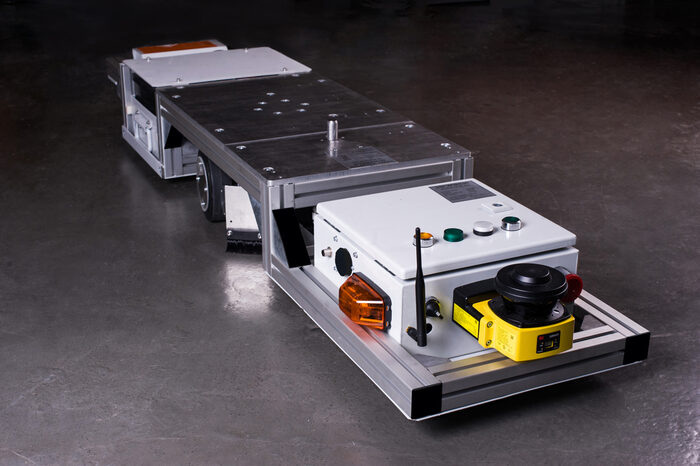
 В случае двустороннего коридора в каждом направлении есть место только для одного транспортного средства.
В случае двустороннего коридора в каждом направлении есть место только для одного транспортного средства.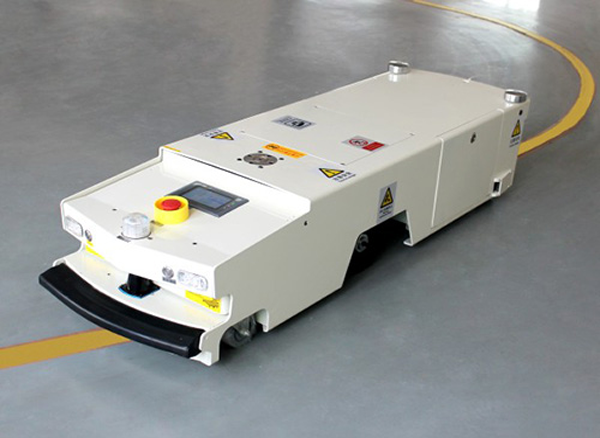 , они могут следовать тысячам «заданных» маршрутов, но эти маршруты должны быть «заданными» . Этот путь может быть проложен магнитами на полу, магнитной лентой, виртуальным путем, созданным с помощью лазерной триангуляции.
, они могут следовать тысячам «заданных» маршрутов, но эти маршруты должны быть «заданными» . Этот путь может быть проложен магнитами на полу, магнитной лентой, виртуальным путем, созданным с помощью лазерной триангуляции. AGV не будет двигаться, пока препятствие не будет удалено.
AGV не будет двигаться, пока препятствие не будет удалено.  Являются ли AMR более гибкими, чем AGV?
Являются ли AMR более гибкими, чем AGV?
 AGV и AMR могут быть совместными, это зависит от того, что вы кладете на автомобиль и как вы управляете интерфейсом с человеком-оператором.
AGV и AMR могут быть совместными, это зависит от того, что вы кладете на автомобиль и как вы управляете интерфейсом с человеком-оператором. AMR сделали огромный шаг вперед, который подтолкнет всю отрасль AGV / AMR к окончательной и надежной свободной навигации.
AMR сделали огромный шаг вперед, который подтолкнет всю отрасль AGV / AMR к окончательной и надежной свободной навигации.

 Естественная навигация – это наиболее продвинутый метод навигации на автоматических транспортных средствах.
Естественная навигация – это наиболее продвинутый метод навигации на автоматических транспортных средствах.
 Таким образом, AGV на основе SLAM может отображать окружающую среду и локализовать себя на этой карте.
Таким образом, AGV на основе SLAM может отображать окружающую среду и локализовать себя на этой карте. Производитель AGV может покупать у поставщика навигационных технологий или разрабатывать собственные навигационные технологии.
Производитель AGV может покупать у поставщика навигационных технологий или разрабатывать собственные навигационные технологии.

 Кроме того, результаты зависят от инструментов и инструментов, используемых для сбора данных.
Кроме того, результаты зависят от инструментов и инструментов, используемых для сбора данных. Также на картинке намного больше информации по сравнению с лазером и сонаром.
Также на картинке намного больше информации по сравнению с лазером и сонаром.
 д.). Цель данных одометрии — предоставить приблизительное положение робота, запрашивая его внутренние датчики одометрии.
д.). Цель данных одометрии — предоставить приблизительное положение робота, запрашивая его внутренние датчики одометрии. Это означает более низкую стоимость рабочей силы.
Это означает более низкую стоимость рабочей силы. д. Основные производители AGV и AMR разрабатывают и внедряют эту технологию в свои роботы.
д. Основные производители AGV и AMR разрабатывают и внедряют эту технологию в свои роботы.
Всего комментариев: 0