Cnc shield v3 своими руками: Переделка шилда CNC Nano.
Содержание
Переделка шилда CNC Nano.
Разное
Подпишитесь на автора
Подписаться
Не хочу
23
В интернете довольно много статей про подключение CNC шилда для Arduino UNO и его аналогов, но про его младшего брата Arduino Nano их намного меньше, а те что есть не учитывают некоторых нюансов китайского происхождения этих самых шилдов. Сам недавно стал владельцем платы CNC shield v3 for Arduino Nano. Вот такой:
В 99% случаем при запросе CNC shield arduino nano появится именно она.
Проблемы этой платы заключаются в следующем, не работают установки микрошага с помощью джамперов, контакты отвечающие за шаг и направление контроллеров шаговых двигателей отличаются от таковых для Arduino Uno, питание силовой части идет напрямую на пин Vin контроллера.
Все описанные дальше манипуляции производятся исключительно на свой страх и риск.
Понадобится чуть-чуть поять, чуть-чуть паять и чуть-чуть изменять код.
Итак поехали.
Для начала разберемся с питанием.
Если ваш источник питания, от которого вы планируете запитать шаговые двигатели, выдает больше 12В, то рекомендую перерезать дорожку ведущую к контакту Vin как показано на картинке ниже.
Далее вернем возможность выставлять микрошаг с помощью джамперов (тут конечно надо сначала убедиться что у вас эта функция не работает так-же как и у меня, при замкнутых джамперах на пинах MS1, MS2, MS3 контроллера шагового двигателя будет 0).
Здесь придется не только резать но и паять. Черным будет указано какие дорожки обрезать, а синим какие замкнуть.
В общем суть заключается в том чтобы подать на контакты джамперов высокий уровень (+5В), работа довольно кропотливая и довольно легко получить короткое замыкание, поэтому вооружитесь тестером и внимательно прозванивайте запаянные контакты во избежание замыкания питания на землю. Результатом должно стать то что при поданном напряжении и установленных джамперах на контактах 1, 2 и 3 должен установиться высокий уровень (равный поданному напряжению), а при разомкнутых джамперах соответственно 0.
Теперь очередь кода.
Пины отвечающие за шаг и направление отличаются у Arduino Nano и Arduino Uno, поэтому залитая в Arduino Nano прошивка GRBL работать не будет.
Для того чтобы она заработала надо внести изменения в файл cpu_map_atmega328p.h (для версии grbl 0.9 и ранее) или cpu_map.h (для версии 1.1f). Находим в них следующие строки:
#define X_STEP_BIT 2
#define Y_STEP_BIT 3
#define Z_STEP_BIT 4
#define X_DIRECTION_BIT 5
#define Y_DIRECTION_BIT 6
#define Z_DIRECTION_BIT 7
и приводим их в такой вид:
#define X_STEP_BIT 5
#define Y_STEP_BIT 6
#define Z_STEP_BIT 7
#define X_DIRECTION_BIT 2
#define Y_DIRECTION_BIT 3
#define Z_DIRECTION_BIT 4
Сохраняем файл и заливаем прошивку через Arduino IDE (ну или компилируем и прошиваем полученный бинарник, кому как больше нравится).
Надеюсь статься кому-то поможет.
Подпишитесь на автора
Подписаться
Не хочу
23
ЧПУ плоттер на Arduino своими руками.

Сегодня расскажу, как можно собрать своими руками ЧПУ плоттер, который будет рисовать ручкой по бумаге. Собирать буду из доступных материалов. Себестоимость станка не превышает 2.5 т. руб. Недорогой и при этом справляется со своей задачей отлично. Наверное, хватит расхваливать свой ЧПУ станок, пора бы и рассказать вам как его сделать. Также рекомендую посмотреть мои предыдущие самодельные ЧПУ станки:
- Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
- Самодельный Лазерный гравёр с ЧПУ, в домашних условиях.
- Самодельный ЧПУ фрезерный станок на Arduino с дисплеем.
- Самодельный CNC станок из мебельных направляющих на базе Arduino UNO.
- Лазерный гравировальный станок с ЧПУ (шаговые двигателя от матричного принтера)
- Мой первый ЧПУ станок из матричных принтеров
Сборка Самодельного плоттера на Arduino.
Для проекта понадобиться следующая электроника:
- ARDUINO UNO.
- CNC shield v3, описание читайте в статье: «Плата для ЧПУ на Arduino UNO, CNC shield v3 и драйвера A4988 (DRV8825)».
- 2 шаговых двигателя NEMA 17 17HS4401. С проводами, которые идут в комплекте.
- 2 драйвера A4988. Про них можно почитать в статье: «Драйвер шагового двигателя A4988».
- Блок питание на 12 вольт.
- Servo 9g.
Сборка механики станка.
Недавно делал узел из карандашей (каретку для ЧПУ), и на основе данной каретки решил собрать ЧПУ плоттер. Но нужно, как минимум, 2 оси, поэтому собрал второй узел, но немного уже. Вот так выглядят узлы осей X и Y для самодельного станка.
Как собирал каретку, можете почитать в предыдущей статье. Про нее могу сказать одно: сделана она из карандашей, строительной шпильки и фанеры.
У широкой каретки поменял основание, на более широкое. Это поможет устранить лишнюю вибрацию станка, и будет поверхность, на котором можно закрепить листок бумаги.
На подвижную часть первой каретки, под углом 90 градусов, устанавливаю вторую каретку. И закрепляю ее с помощью саморезов.
Обычную ручку использовать в данном проекте не получится, так как нужен подвижный механизм, а также крепеж для нее. Для этого купил в канцелярском магазине: гелевую ручку, авторучку и циркуль «козья ножка».
Из гелевой ручки достал пасту и на край установил пружинку из авторучки. Также срезал бортик внизу пасты. Чтобы она проваливалась в корпус ручки.
Установил пасту в ручку и проверил нажатием пальца. Паста проваливается и потом обратна возвращается под действием пружинки.![]()
Намотал и приклеил нитку на пасту. Тут я допустил ошибку, использовал хлопчатобумажную нить. Она у меня притёрлась буквально через 2 часа работы. Заменил капроновой нитью и нанес на нее смазку.
В корпусе ручки сделал отверстия, и продернул нить. Установил пасту на место.
На ось X установил сервопривод, прикрепив его саморезами.
Используя держатель от циркуля «козья ножка», прикрепил ручку на ось X.
Привязал нить от ручки к качалке сервопривода. Закрепил винтом качалку.
Все механику собрали, сейчас можно устанавливать остальные компоненты и проверять работоспособность станка.
Установка электроники плоттера.
Большая часть электроники у нас установлена. А именно, шаговые двигателя стоят на месте, сервопривод установлен. Осталось установить управляющую электронику.
На подготовленную фанерку, установил плату Arduino UNO.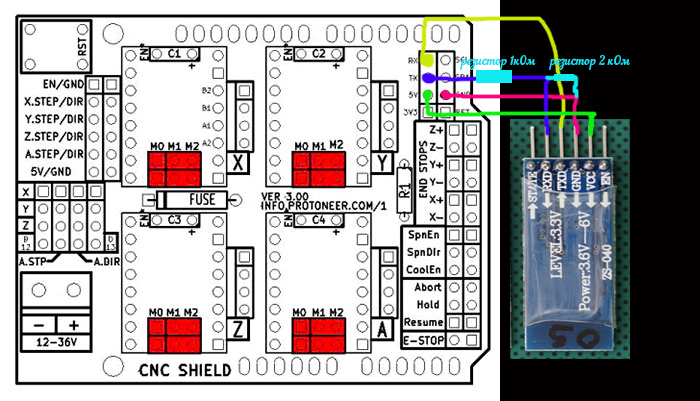
Сверху двигателя оси Y установил фанерку с Arduino.
На Arduino UNO установил CNC shield v3 и 2 драйвера A4988.
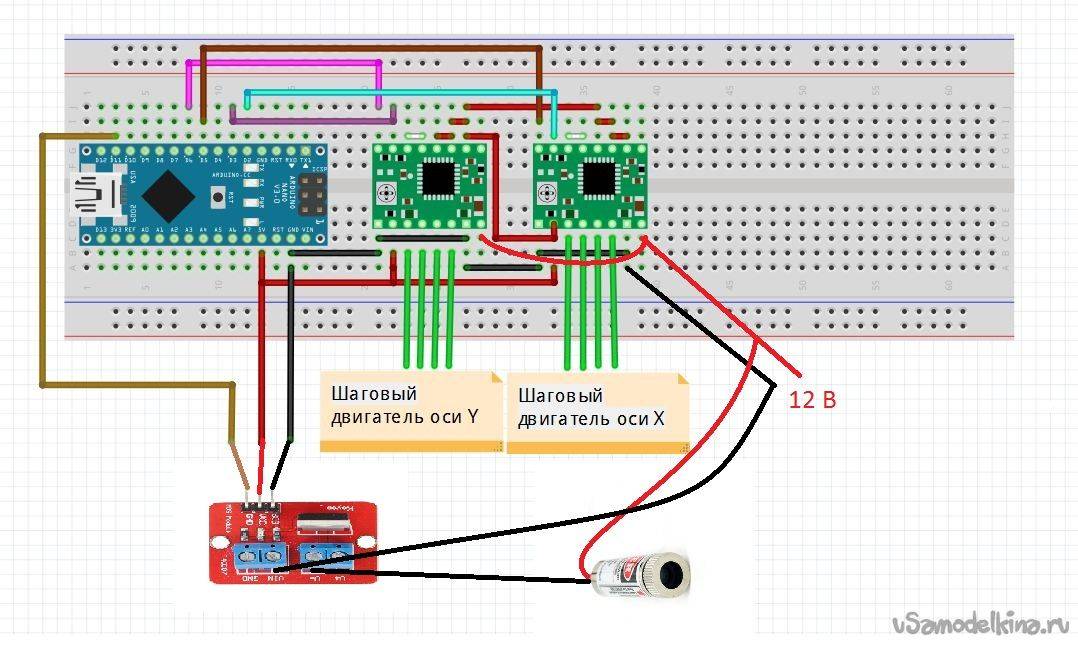
Осталось все подключить, а для этого нужна схема подключения.
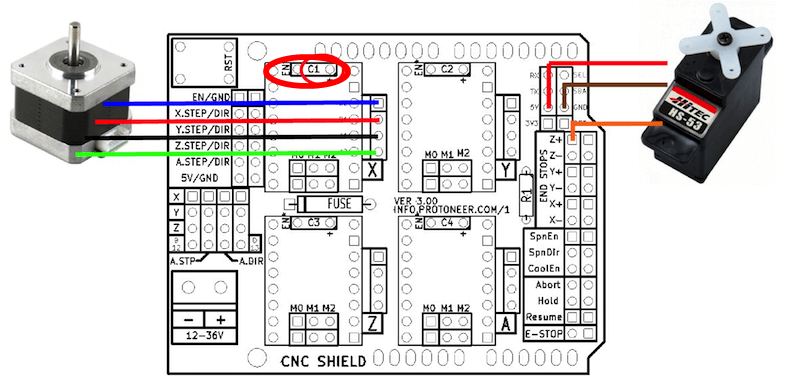
Схема подключения электроники ЧПУ плоттера на Arduino UNO и CNC shield v3.
Схема подключения очень простая и не требует дополнительных проводов.
Шаговые двигателя подключаю проводами, которые идут в комплекте.
Для подключения сервопривода нужно достать информационный провод из колодки, он обычно оранжевого цвета, и подключить к пину Z+, а провода питания сервопривода подключить к выводам 5v и GND, на CNC shield.
Подключение самое простое, из всех моих самодельных ЧПУ станков. Вот почему многие начинают сборку своих первых ЧПУ станков с плоттера.
Установка и настройка grbl.
Как загрузить прошивку grbl в Arduino UNO уже рассказывал не однократно, например в статье: «Установка и настройка программы LaserGRBL.», но тут будем использовать немного модифицированную прошивку, как раз под данный проект. Поэтому повторю все шаги, которые нужно сделать.
1. Установка Arduino IDE.
Сперва, нужно установить среду программирования Arduino IDE. Если она у вас установлена, то можете смело пропустить данный пункт.
Я уже рассказывал, как установить и настроить программу Arduino IDE, в статье: «Программа Arduino IDE, бесплатно для Windows, Mac OS, linux. Прошиваем Arduino». Поэтому, расскажу вкратце основные этапы установки и настройки, для операционной системы Windows.
Установка драйвера ch440.
- Скачайте драйвер внизу статьи в разделе «файлы для скачивания»;
- Распакуйте архив;
- Запустите исполнительный файл «Ch441SER.
 EXE»;
EXE»; - В открывшемся окне нажмите кнопку Install;
- На этом установка завершена.
Теперь можно приступать непосредственно к загрузке библиотеки GRBL.
2. Установка библиотеки grbl.
Как и писал ранее, использовать будем не стандартную библиотеку GRBL. Найти необходимую библиотеку можно по запросу в поисковике «Grbl Pen Servo», либо скачать внизу страницы в разделе «файлы для скачивания».
Внимание!!! Нужно обязательно удалить библиотеку GRBL, если вы ставили раньше. Для этого заходим в папку «Документы\Arduino\libraries» и ищем папку «grbl», и удаляем ее.
Дальше нужно установить библиотеку grbl. Это можно сделать двумя способами:
- Скопировать папку grbl, из архива, в папку с библиотеками Arduino, которая располагается по следующему пути: Документы\Arduino\libraries.
- Установить через менеджер библиотек:
Заходим в Arduino IDE и выбираем в меню: Скетч –> Подключить библиотеку –> Добавить .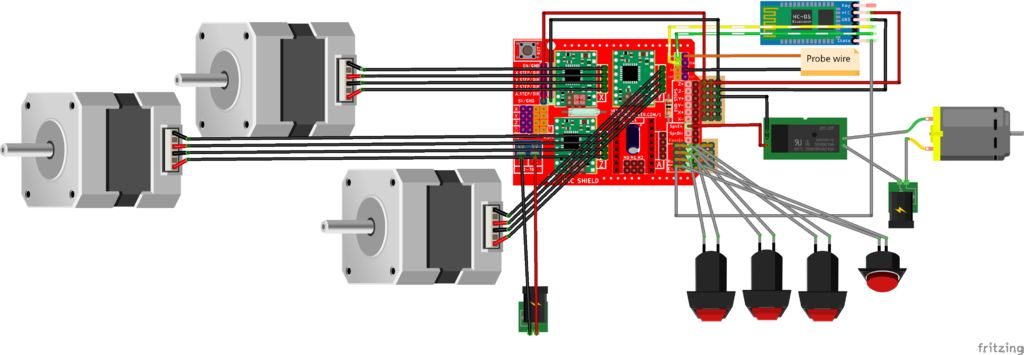 ZIP библиотеку…
ZIP библиотеку…
Выбираем скаченный архив grbl.zip и нажимаем кнопку «Открыть». После установки вы увидите надпись, что библиотека успешно добавлена.
3. Загрузка grbl в Arduino UNO.
После установки библиотеки grbl, заходим в меню Файлы –> Примеры, и в списке ищем пример «grbl». Открываем пример «grblUpload».В примере ничего менять не нужно, его нужно загрузить в Arduino UNO. Для этого, в пункте меню «Инструменты», выбираем плату «Arduino UNO» и порт, к которому подключена плата. В моем случае это «COM9».
Теперь мы можем загрузить прошивку GRBL в Arduino UNO. Для этого нажимаем на кнопку «Загрузить». После компиляции скетча, код будет загружен в микроконтроллер. И вы увидите надпись «Загрузка завершена».
Также вы увидите надпись оранжевого цвета «Недостаточно памяти, программа может работать нестабильно». Но не пугайтесь, все будет работать отлично.
Настройка электроники ЧПУ плоттера на Arduino.

Первым делом нам нужно определиться, какое деление шага поставить для нашего станка и затем рассчитать, сколько шагов будет делать шаговый двигатель, чтобы переместиться на 1 мм. по осям X и Y.
Деление шага.
Перед установкой драйверов необходимо установить перемычки деления шага. Что это такое, и для чего нужно деление шага, читайте в статье про драйвер A4988: «Драйвер шагового двигателя A4988». Я устанавливаю деление шага ½, потому что при увеличении деления шага падает мощность двигателя. У меня получается 400 шагов на мм, — этого вполне достаточно для плоттера.
Расчет деления шага.
Как же рассчитать деление шага, и сколько шагов нужно для совершения перемещения на 1 мм? Количество шагов, сделанных шаговым двигателем, для совершения перемещения станка на 1 мм, зависит от характеристик шагового двигателя, от передачи (винтовая или ременная), какое деление шага настроено (для разных драйверов деление шага настраивается по-разному, и количество отличается). В моем случае, получаются следующие параметры:
В моем случае, получаются следующие параметры:
- Шаговый двигатель 17HS4401 совершает 200 шагов на 1 оборот вала. (Из характеристик двигателя).
- Шпилька, с метрической резьбой М6, перемещается на 1 мм. за оборот (табличное значение).
- Деление шага установил ½.
Количество шагов на 1 мм рассчитываем по формуле:
H = Sh*M/D где:
Н – количество шагов для перемещения на 1 мм.
Sh – количество шагов шагового двигателя для совершения 1 оборота.
М – перемещение при вращении ходового винта на 1 оборот.
D – установленное деление шага.
Н = 200*1/0,5 = 400 шагов для перемещения на 1 мм.
Данные параметры нам пригодятся при настройке GRBL.
Установка драйверов A4988 и настройка ограничивающего тока.
После установки деления шага, устанавливаем драйвер A4988 в разъёмы с надписью X и Y. Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Расчет ограничивающего тока драйвера шагового двигателя A4988:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае, RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем, что рабочий ток двигателя равен 70% от тока удержания, то полученное значение нам нужно умножить на 0,7. В противном случае двигатели, в режиме удержания, будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Настраиваем ток шагового двигателя.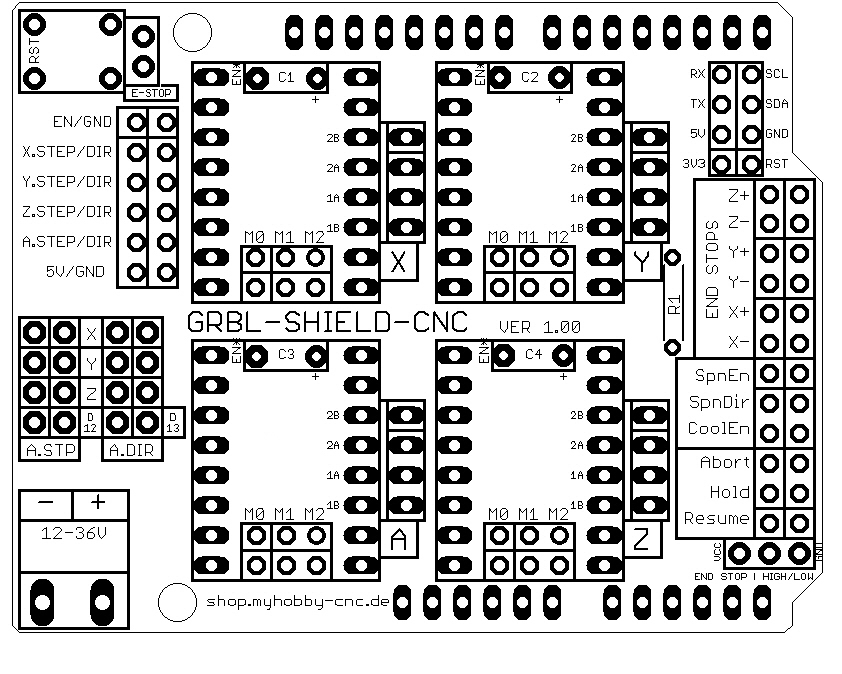
Для этого возьмём мультиметр, и один контакт подключим к контакту GND, а второй на переменный резистор драйвера. Поворачивая потенциометр на драйвере, подбираем нужное напряжение. На мультиметре у меня показания в мВ, поэтому такое большое значение.
Аналогично настраиваем ограничивающий ток для второго драйвера.
Внимание! Не забудьте установить радиатор охлаждения на драйвер шагового двигателя, в противном случае драйвер будет перегреваться.
Настройка GRBL ЧПУ плоттера.
Как настроить GRBL ЧПУ станка я уже рассказывал неоднократно. Например, в статье: «Установка grbl 1.1 на Arduino uno. Основы работы в программе LaserGRBL», рассказываю, как используя монитор порта Arduino IDE, настроить прошивку станка. А в статье «Установка и настройка программы LaserGRBL.», рассказываю, как настроить прошивку лазерного станка, с помощью управляющей программы LaserGRBL.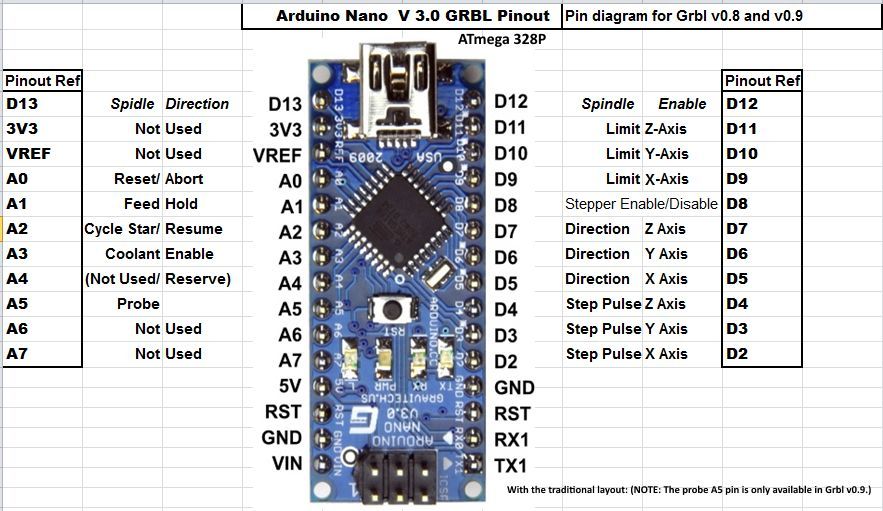
Плоттер можно настроить через монитор порта среды Arduino IDE или через управляющую программу «Universal G-Cod Sender», по аналогии с программой LaserGRBL. Для этого скачиваем программу с GitHub или внизу статьи в разделе «файлы для скачивания».
После установки, в операционной системе Windows, у меня выдало кучу знаков вопроса вместо русского текста.
Поменял язык на английский, и программа заработала нормально. Поэтому, покажу все настройки в англоязычной версии программы.
Для начала нам нужно подключить наш станок по USB кабелю к компьютеру. И программе выбрать порт скорость и нажать на кнопку «Open».
Затем переходим в меню «Setting -> Firmware Setting»
Откроется список настроек станка, нам нужно поменять параметры:Сколько нужно сделать шагов, чтобы наш станок переместился на 1 мм по оси X, Y. Для обеих осей это значение получилось 400. 2.
2.
- $120=16.000
- $121=16.000
Наша прошивка настроена так, что сервопривод срабатывает на поднятие, когда подаем команду на перемещение по оси Z, также можно настроить некоторые параметры для данной оси.
- $102=400
- $111=500
- $121=50.000
Эти параметры можно указать больше. Подробнее о них расскажу в следующей статье.
Программа для создания G-Code и управляющая программа.
С выбором программы для создания G-code у меня возникла проблема. Но об этом расскажу в следующий раз, а сейчас напишу список программ, которые я использовал. В следующей статье расскажу, почему выбор пал именно на эти программы.
Inkscape.
Программа для работы с векторной графикой. В программе есть плагин для создания G-code, но для нашей работы не подходит. Делает двойную обводку. Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Carbide Create V5.
Carbide Create — бесплатная CAD/CAM программа, разработанная производителями небольших ЧПУ станков “Carbide 3D”. В данной программе можно создавать небольшие чертежи, а также генерировать G-Code из векторных рисунков формата .svg. Программа неплохая, но есть ряд минусов. О них в следующей статье.
Candle.
Candle – управляющая программа для ЧПУ станков. Она полностью на русском языке. Достаточно функциональная и при этом не сложная. Но нет простой настройки конфигурации GRBL.
Universal G-codeSender.
Отличная управляющая программа. В настройках можно выбрать русский язык. Но, к сожалению, на компьютере, с операционной системой Windows, постоянно возникают проблемы. Работал на ней в Linux, работает отлично. Использую данную программу для демонстрации простоты настройки конфигурации GRBL.
Продолжение в следующей статье.
Понравился проект ЧПУ плоттер на Arduino своими руками? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| Grbl Pen Servo.zip | 143 Kb | 2183 | Скачать | |
| Universal G-code Sender.zip | 28368 Kb | 1921 | Скачать | |
| Carbide Create.zip | 48999 Kb | 1774 | Скачать | |
Candle 1. 1.7.zip 1.7.zip | 29095 Kb | 1678 | Скачать | |
| драйвер Ch440G.zip | 186 Kb | 1492 | Скачать |
Arduino-совместимый щит с ЧПУ Инструкции
Первый запуск
Важные моменты, которые следует учитывать перед началом работы:
1) Дважды проверьте полярность входного питания («+» и «-»)
2) Обратите внимание на ориентацию драйверов шаговых двигателей. Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Предполетный контрольный список
1. Визуально проверьте все точки пайки на новой плате
2. Подключите экран к плате Arduino и загрузите прошивку GRBL, выполнив следующие шаги:
- Загрузите исходный код GRBL. Скачать здесь
- Разархивируйте загрузку, и у вас будет папка с именем «grbl-master»
- Запустите Arduino IDE.
 (Пожалуйста, убедитесь, что вы используете самую последнюю версию Arduino IDE.)
(Пожалуйста, убедитесь, что вы используете самую последнюю версию Arduino IDE.) - Загрузите GRBL в Arduino IDE как библиотеку. (Нажмите раскрывающееся меню «Эскиз», затем перейдите к «Включить библиотеку» и выберите «Добавить библиотеку .ZIP»)
- ВАЖНО: выберите папку «Grbl» внутри папки «grbl-master», которая содержит только исходные файлы и пример каталога. (Если вы случайно выбрали файл .zip или неправильную папку, вам нужно будет перейти в библиотеку Arduino, удалить ошибку и повторить этот шаг.)
- Откройте пример Arduino «GrblUpload». (Нажмите раскрывающееся меню «Файл», перейдите к «Примеры-> Grbl» и выберите «GrblUpload»)
- Скомпилируйте и загрузите GRBL на Arduino. (1. Подключите Arduino Uno к компьютеру. 2. Убедитесь, что ваша плата настроена на Arduino Uno в меню «Tool->Board», а последовательный порт правильно выбран в «Tool->Serial Port». 3 . Нажмите «Загрузить», и GRBL должен скомпилироваться и прошить на ваш Arduino!0020
3. Откройте последовательное соединение с платой Arduino и проверьте, запущен ли GRBL. (Мы используем универсальный отправитель G-кода для подключения к GRBL)
4. Драйверы шаговых двигателей A4988 нуждаются в настройке для опорного напряжения. Мы рассмотрим это подробно позже.
5. Тестирование каждого разъема контроллера шагового двигателя по отдельности имеет решающее значение.
- Убедитесь, что внешний источник высокого напряжения не включен и не подключен
- Подключите шаговый двигатель к разъему контроллера шагового двигателя, который вы хотите проверить. Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
- Затем установите драйвер шагового двигателя, убедившись, что контакт включения на драйвере совмещен с контактом включения на экране.

- Подключите внешний источник питания к экрану, убедившись, что вы подключили питание правильно. Неправильное подключение может привести к повреждению экрана, драйверов шагового двигателя и платы Arduino.
- Отправьте g-код на тестируемую ось. Шаговый двигатель должен двигаться, если все работает. (Пример GCode: «G1 X5?» или «G1 X0?» или «G1 Y5?»)
- Повторите вышеуказанный процесс для каждой оси, используя один и тот же шаговый драйвер. (Тестирование с одним драйвером снижает риск одновременного повреждения нескольких шаговых драйверов.)
6. После проверки всего вышеперечисленного подключите все драйверы и включите систему.
Регулировка предела тока (опорного напряжения) для драйвера шагового двигателя
A4988, продаваемый Zyltech, Rs = 0,1 Ом. Таким образом, максимальный ток равен Vref/0,4
Vref (опорное напряжение) измеряется с помощью мультиметра в точках, указанных
Drv 8825 продается Zyltech. Максимальный ток = Vref x 2
Максимальный ток = Vref x 2
Опорное напряжение регулируется маленькой отверткой в точке, указанной белой стрелкой на рисунке справа. Мы предлагаем регулировать опорное напряжение небольшими шагами — не более четверти оборота за раз. Для начала вы можете установить максимальный ток 1А. Если двигатель перегревается, уменьшите Vref. Если двигатель не двигается или пропускает шаги, увеличьте Vref.
Настройки перемычек
Перемычки используются для настройки конфигурации 4-й оси, микрошага и конечной остановки.
Конфигурация 4-й оси
С помощью двух перемычек можно настроить 4-ю ось для клонирования оси X, Y или Z. Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Клонировать ось X на 4-й шаговый драйвер | Клонировать ось Y для 4-го шагового привода | Клонировать ось Z для 4-го шагового привода | Используйте D12 и D13 для управления драйвером 4-го шагового двигателя |
Настройка микрошага для каждой оси
*В приведенных ниже таблицах высокий уровень означает, что перемычка установлена, а низкий уровень означает, что перемычка не установлена.
Pololu A4988 Конфигурация шагового драйвера:
MS0 MS1 MS2 Решение микростепа
Низкий низкий низкий уровень полного шага
Высокий низкий низкий шаг
Низкий низкий квартал шаг
высокий высокий сорт
Высокий высокий шестнадцатый шаг
55. Конфигурация драйвера шагового двигателя DRV8825:
MODE0 MODE1 MODE2 Microstep Разрешение
Низкий низкий низкий низкий полный шаг
Низкий низкий низкий уровень половины
Низкий низкий низкий 1/4 Шаг
Высокий высокий низкий 1/8 Шаг
Низкий низкий высокий 1/16 Шаг
Высокий высокий высокий 1/32 Шаг
Высокий высокий высокий 1// 32 шага
Высокий Высокий Высокий 1/32 шага
По умолчанию GRBL настроен на срабатывание предупреждения, если конечный упор становится низким (становится заземленным). Это обсуждалось, и некоторые люди просили иметь активные верхние конечные упоры. | Концевые выключатели — это стандартные «всегда открытые» выключатели. Концевой упор активируется, когда контакт конечного упора соединяется с землей (при настройке с настройками GRBL по умолчанию). |
 Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)
Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)Конфигурация конечной остановки
Концевые выключатели, входящие в комплект ZYLtech, имеют три провода. Такие концевики просты в использовании, контроле и установке, особенно по сравнению с простыми механическими переключателями. Однако, в отличие от экрана RAMPS, экран CNC предоставляет только 2 PIN-заголовка. Существует два способа установки концевых упоров:
Подключение двигателей
Подключение шаговых двигателей ZYLtech Nema 17 очень просто. Подключите разъемы к заголовкам для каждой оси.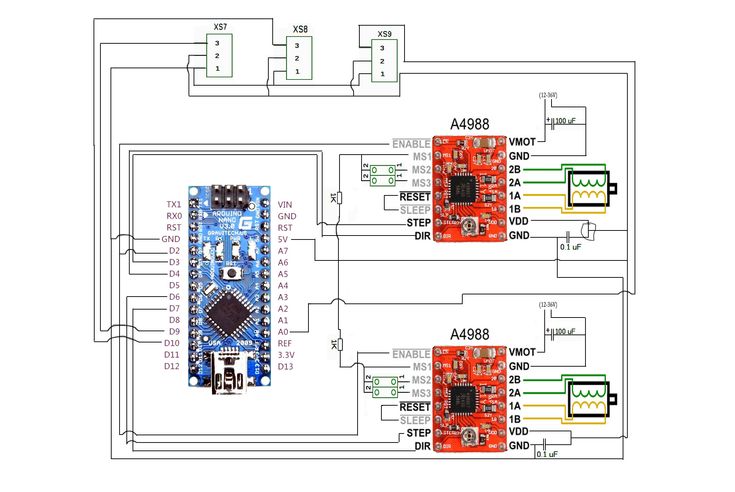 Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Базовая плата OSOYOO + CNC Shield V3.0+A4988 Руководство по установке « osoyoo.com
Время публикации: 2017-04-07 01:04:44
Категория: Детали и проекты для Arduino IDE с открытым исходным кодом
Обзор
CNC Shield V3.0 можно использовать в качестве платы расширения привода для гравировального станка, 3D-принтера и других устройств. На плате есть 4 слота для модулей привода шагового двигателя, они могут управлять 4 шаговыми двигателями, и каждому шаговому двигателю требуется только два порта ввода-вывода, то есть 6 портов ввода-вывода вполне могут управлять тремя шаговыми двигателями, это очень удобно. удобно использовать. После того, как вы вставите CNC Shield V3.0 в базовую плату OSOYOO и установите прошивку GRBL, вы сможете быстро сделать гравировальный станок с ЧПУ своими руками.
Схема платы
Схема контактов GRBL:
Схема контактов GRBL
:
Дополнительные штифты:
- Штифты концевого выключателя удвоены, так что каждая ось имеет «Верх/+» и «Низ/-».
 Это упрощает установку двух концевых выключателей для каждой оси. (Для использования с нормально разомкнутым выключателем)
Это упрощает установку двух концевых выключателей для каждой оси. (Для использования с нормально разомкнутым выключателем) - EStop — эти контакты можно подключить к выключателю аварийной остановки. Это делает то же самое, что и кнопка RESET на плате Arduino. (Мы советуем также установить дополнительную аварийную кнопку, которая отключает питание всего оборудования. НАСТОЯЩАЯ АВАРИЙНАЯ КНОПКА )
- Управление шпинделем и подачей СОЖ имеет собственные контакты.
- внешних командных контактов GRBL были разорваны, что позволяет добавлять кнопки для паузы/удержания, возобновления и отмены.
- (D0-1) и выводы I2C (A4-5) имеют собственные выводы для будущих расширений. Позже I2C можно будет реализовать с помощью программного обеспечения для управления такими вещами, как скорость вращения шпинделя или контроль нагрева.
- В версии 3.00 на плате добавлены перемычки для настройки 4-й оси (клонирование другой оси или запуск от контакта D12-13), разъема связи (RX+TX, I2C) и разъема управления шаговым двигателем (все контакты необходимы для запуска 4 шаговых двигателей).
 )
)
Последовательные выводы
Установка оборудования
Подсоедините компоненты в соответствии с реальной ситуацией, такие как двигатели, концевые выключатели, лазеры, моторные приводы и т.д.
При установке оборудования обратите внимание на следующие моменты:
1) Неправильное подключение +/- может привести к поломке ваших устройств и даже к возгоранию.
2) Пожалуйста, убедитесь, что вставляете драйверы в правильном направлении, иначе это может сжечь материнскую плату и драйверы, особое направление установки, пожалуйста, интегрируйте Arduino CNC Shield V3.0, см. техпаспорт электропривода. На картинке показано подключение драйверов моторов A4988 и Arduino CNC Shield V3.0.
A4988 опора 1 сегмент, 1/2 сегмента, 1/4 сегмента, 1/8 сегмента, 1/16 сегмента. Каждый сегмент задается контактным разъемом M0, M1, M2 в плате Arduino CNC Shield V3.0, заглушка перемычки соответствует высокому уровню, не закрывайте перемычку — низкому уровню.
Для повышения точности гравировки используйте сегмент 1/16, необходимо 3 перемычки для покрытия M0, M1, M2. Как показано на рисунке:
Как показано на рисунке:
3) Входное напряжение Arduino CNC Shield V3.0 составляет 12–36 В постоянного тока, входное напряжение не должно превышать 36 В. Хотя входное напряжение поддерживает блоки питания до 36 В, это не означает, что вы можете использовать 36 В ни при каких обстоятельствах, потому что напряжение питания некоторых драйверов двигателей (VMOT) меньше 36 В, таких как A4988, его напряжение питания составляет 8-35 В, если вы используете источник питания 36 В, он сожжет драйвер двигателя. Поэтому, когда вы выбираете источник питания, пожалуйста, обратитесь к соответствующему техническому паспорту драйвера двигателя. Вот несколько параметров напряжения питания для обычного драйвера двигателя:
A4988
DRV8824/DRV8825
TMC2100
Установка программного обеспечения
1). . Откройте IDE Arduino, выберите File->Examples->grblmain->GRBLtoArduino, затем вы откроете пример программы grbl, выберите порт и тип платы, запишите этот пример программы grbl на Arduino UNO.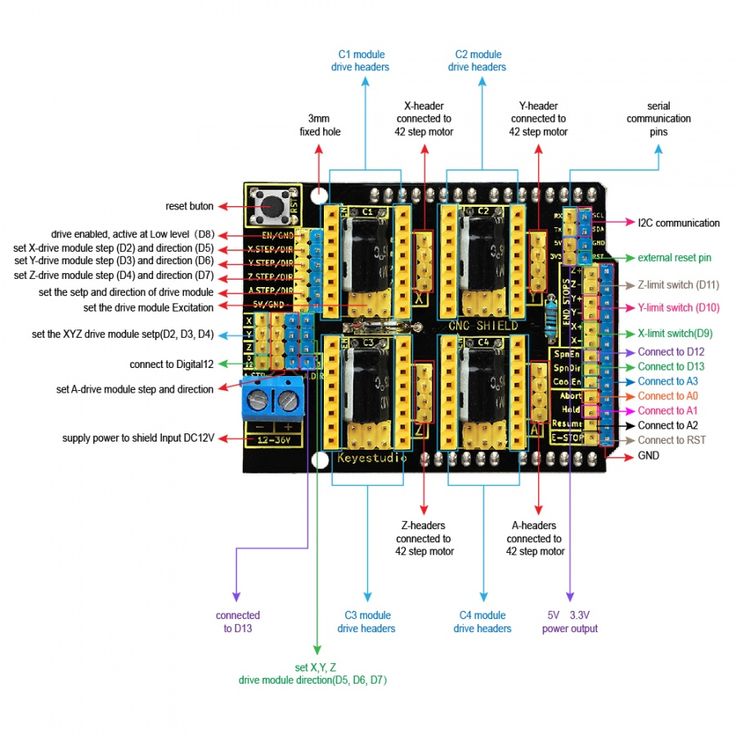
Всего комментариев: 0