Серводвигатели с обратной связью: Шаговые двигатели с обратной связью: продажа со склада
Содержание
Сервопривод или шаговый двигатель?
Главная
/
Справочник
/
Сервопривод или шаговый двигатель?
В случаях, когда необходима высокая точность работы исполнительных механизмов, используют асинхронный электродвигатель с энкодером обратной связи. Однако в промышленных станках с особыми требованиями к точности позиционирования подобное оборудование не справится с задачами в силу ряда конструктивных недостатков — низкого момента на малых скоростях, проскальзывания ротора, инерции при разгоне и торможении. В таких случаях используются сервоприводы и шаговые двигатели. Рассмотрим преимущества и недостатки обоих типов приводов.
Рассмотрим преимущества и недостатки обоих типов приводов.
Сервоприводы
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.
Шаговые двигатели
Шаговый двигатель — это особый вид многофазного синхронного двигателя, дискретное вращение которого производится путем подачи импульсов напряжения на нужные обмотки статора. При этом ротор не имеет обмоток и состоит из магнитного материала.
Основной параметр шагового двигателя — его шаг, или количество шагов на оборот. Для одного полного оборота ротора необходимо строго определенное количество импульсов. Чем меньше шаг, тем большую точность позиционирования может обеспечить данный шаговый двигатель.
Управляющие импульсы формируются специальным драйвером, который получает задание с контроллера. При этом обратной связи не требуется, поскольку путем подсчета импульсов всегда можно узнать, на какой угол повернулся вал шагового двигателя, и сколько оборотов он сделал.
Преимущества сервоприводов
- Мощность серводвигателей может достигать 15 кВт, в то время как мощность шагового электродвигателя, как правило, не превышает 1 кВт.

- Бесшумность работы благодаря принципу действия и сверхточному исполнению конструкции.
- Скорость вращения в сервоприводах может достигать 10000 об/мин, в некоторых случаях и больше. У шаговых двигателей номинальная скорость вращения обычно не превышает 1000 об/мин вследствие падения момента и увеличения вероятности ошибок.
- Высокая энергоэффективность. Потребляемая мощность сервопривода пропорциональна нагрузке на валу. Для шагового электродвигателя потребляемая мощность одинакова вне зависимости от нагрузки.
- Наличие обратной связи обеспечивает точной информацией о повороте вала в любой момент времени. В шаговых двигателях возможно проскальзывание при перегрузке, накопление ошибки и потеря позиционирования.
- Большая плавность хода. В шаговых двигателях добиться плавности можно только путем применения специальных методов управления.
Преимущества шаговых двигателей
- Меньшая цена при одинаковой мощности в силу более простой конструкции двигателя и драйвера.

- Возможность работы на экстремально низких оборотах без ухудшения характеристик и применения редукторов.
- Более точное позиционирование, обусловленное конструкцией двигателя.
- Отсутствие необходимости в обратной связи.
- Для фиксации вала двигателя при останове достаточно снять с него напряжение. При останове серводвигателя необходимо расходовать мощность на удержание либо использовать электромеханический тормоз.
Применение
В промышленном оборудовании для выполнения задач позиционирования имеет смысл использовать и асинхронные двигатели с обратной связью, и сервоприводы, и шаговые двигатели.
Сервоприводы устанавливаются в тех узлах оборудования, где требуется точное позиционирование механизмов для их синхронизации с другими узлами. В частности сервоприводы широко используют в обрабатывающих станках.
Шаговые двигатели нашли наибольшее применение в станках с ЧПУ и в робототехнике.
На практике встречаются производственные линии, в которых в различных узлах используются все три типа электродвигателей.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Как выбрать мотор-редуктор
Редуктор от «А» до «Я»
Подпишитесь на рассылку!
Никакого спама! Только полезная справочная информация.
Я согласен на обработку персональных данных
Сравнение шаговых и серводвигателей: Какой лучше?
В этой статье мы разберем что такое шаговый двигатель, сервопривод, какие шаговые двигатели бывают по типу роторов, обмоток и сравним их.
Оглавление
Что такое шаговый двигатель
Шаговый двигатель – это синхронный бесщеточный механизм, основная его задача преобразовывать электрическую энергию в механическую. Данный двигатель используют в лазерных и фрезерных станках с ЧПУ. Когда подается потенциал на обмотки, шаговый двигатель поворачивается строго на заданный угол.
Когда подается потенциал на обмотки, шаговый двигатель поворачивается строго на заданный угол.
Какие шаговые двигатели бывают
Шаговые двигатели по типу роторов
- С постоянными магнитами.
У данного двигателя ротор выполнен из постоянного магнита, в котором может находится два и больше количество чередующихся полюсов “+” и “-”, но их количество всегда четное. Работает данный двигатель по принципу притяжения разноименных полюсов друг к другу.
При возбуждении обмотки статора постоянным током, создается магнитный поток с полюсами “+” и “-”.
Из-за силы притяжения и отталкивания между полюсами ротора и статора, ротор начинает вращаться.
- С переменным магнитным сопротивлением.
Этот двигатель самый простой и его уже почти не используют. На его статоре находятся зубья, которые обычно запитываться от трех отдельных источников постоянного тока. Ротор состоит из стальных пластин с меньшим количеством зубьев чем у статора, это сделано для того, чтобы только одна пара зубьев ротора одновременно находилась напротив зубьев статора.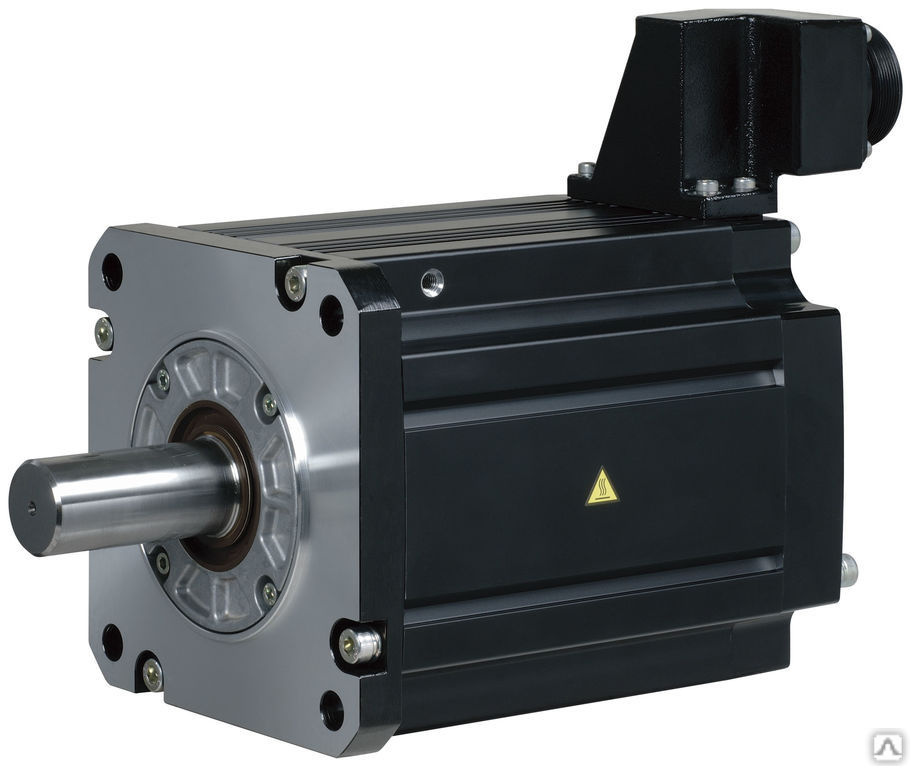
Например, если наш статор будет иметь 6 зубьев, то у ротора их будет 4, а шаг двигателя составит 30 градусов. Для уменьшения углового шага, можно увеличить число полюсов на статоре и роторе. Это рассчитается по формуле.
Угол шага = 360 / (Nr * q)
где: Nr – количество полюсов ротора
q – количество фаз
- Гибридный.
Его статор конструктивно и по типу подключения схож со статорами предыдущих типов. Ротор представляет собой постоянный магнит, имеющий намагниченность в осевом направлении.
На каждом его полюсе располагаются зубья, они смещены относительно друг друга на пол зуба.
Принцип работы гибридного двигателя такой же, как и у двигателя с постоянным магнитом.
Шаговые двигатели по типу обмоток
- Биполярный.
Биполярный двигатель состоит из двух обмоток, каждая из которых имеет два вывода. Для того чтобы их запитать, на выводы обмоток нужно подать разность потенциалов.
- Униполярный.
Униполярный двигатель конструктивно похож на биполярный, но в отличие от биполярного он у него пять выводов и на фазе имеет две катушки.
Пятый вывод — это соединение центральных точек обмоток двух катушек, обычно подключается к земле. Для того что бы включить двигатель, достаточно подать положительный потенциал на один из выводов его обмотки.
Двух и трехфазные двигатели
Шаговые двигатели бывают двух и трехфазные. Отличаются они друг от друга только внутренне, количеством зубьев статора и ротора.
Серводвигатель
Серводвигатель – это двигатель с отрицательной обратной связью. У него высокие скоростные характеристики и высокая точность позиционирования. Данный двигатель сочетает в себе большую мощность и компактность. В составе двигателя есть датчик позиции или скорости. Управление осуществляется с помощью инвертора.
У серводвигателя дискретная величина шага значительно ниже, чем у шагового.
Сравнение и преимущества
Двухфазные двигатели уступают трехфазным двигателям в точности шага, но это можно компенсировать дроблением шага двигателя. Также по сравнению с трехфазными они дешевле. Двухфазные шаговые двигатели в основном устанавливаются на тяжелые и массивные узлы станка.
Если мы применим дробление шага к трехфазному двигателю, то его точность станет еще выше, что будет очень полезно при выполнении детальной гравировке.
Трехфазные шаговые двигатели устанавливаются на станки где требуется высокая точность позиционирования.
Профессиональные фрезерные станки с ЧПУ, требующие более жестких допусков, лучше оснащать серводвигателями, они мощнее, быстрее, точнее, у них есть обратная связь. Такие приводы гарантируют быструю и стабильную работу для вашего производства.
Обратная связь по положению | Что вам нужно знать
Во многих приложениях управления движением, таких как робототехника и автоматизированное производство, отслеживание положения вала имеет решающее значение для обеспечения бесперебойной работы работающих устройств.
Одним из лучших решений является реализация обратной связи по положению в энкодерах для обеспечения точного позиционирования в любой точке во время вращения вала.
Обратная связь — это просто сигнал, отправляемый обратно на сервопривод или контроллер для передачи измеренного значения, такого как напряжение, скорость, ток, крутящий момент, ускорение или позиционирование. Датчики обратной связи обычно интегрируются в двигатели или нагрузки для передачи информации о положении или скорости.
Добавление устройства обратной связи в приложение движения создает систему с замкнутым контуром, в которой сервопривод или контроллер могут компенсировать возмущения в двигателе или нагрузке, регулируя выходной сигнал для достижения желаемых значений. Обратная связь по положению передает угловое положение поворотных двигателей или линейное положение линейных двигателей.
Существует два типа измерительных систем обратной связи по положению, которые мы обсудим в этой статье: измерение абсолютной обратной связи и измерение инкрементной обратной связи.
Инкрементальная обратная связь
Инкрементальная обратная связь работает путем сканирования строк на диске и преобразования этих шаблонов в электрические импульсы или синусоидальные/косинусоидальные сигналы, которые затем отправляются на сервопривод. Затем привод измеряет перемещения в приращениях, которые происходят в том или ином направлении.
Энкодеры с инкрементальной обратной связью могут отслеживать фактическое положение только после выполнения процедуры возврата в исходное положение, когда он устанавливает опорную точку для вращения. Это означает, что ему необходимо переместиться в известное место, такое как конечный упор, или передать переключатель возврата в исходное положение или индексный импульс.
Как только двигатель достигает известного положения, система может отслеживать положение, как это делает абсолютная обратная связь. К сожалению, частыми осложнениями могут быть сбои, а также потеря напряжения питания, из-за которой инкрементальная система теряет свою точку отсчета.
Если бы система выключилась, информация о местоположении была бы потеряна, и процедуру возврата в исходное положение пришлось бы запускать снова.
Примером процедуры возврата в исходное положение может быть струйный принтер. При первом включении печатающая головка перемещается вперед и назад по ширине области печати в рамках процесса запуска.
Инкрементальные энкодеры
Инкрементальный энкодер TTL использует фотодетектор для преобразования света в сигнальные импульсы. По сути, источник света светит через прорези (или линии) на диске, и фотодетектор преобразует его в электрические сигналы по каналам A и B.
Разрешение является цифровым и зависит от количества линий или отсчетов (4x строк).
Электрические импульсы проходят по каналам A и B в энкодере, которые включаются и выключаются, а также перекрываются. Измеряя соотношение фаз между каналами A и B, энкодер может измерять направление приращения электрических импульсов для определения общего позиционирования.
Но для более точного и абсолютного измерения положения требуется добавление другого сигнала, иногда называемого индексом, маркером или каналом I, чтобы отметить абсолютное положение двигателя в пределах 1 оборота.
Анализируя эти четыре состояния, энкодер может отслеживать положение, отсчитывая направление каждого импульса от начальной точки.
Инкрементальный энкодер Sin/Cos очень похож на энкодер TTL, но использует аналоговые сигналы Sin и Cos для каналов A и B.
Соотношение между сигналами Sin/Cos позволяет выполнять интерполяцию между «отсчетами», что значительно увеличивает разрешение. 2048 дополнительных отсчетов (или более) могут быть интерполированы между каждым стандартным отсчетом.
Абсолютная обратная связь
В отличие от инкрементальной обратной связи, энкодеры с абсолютной обратной связью полагаются на закодированный диск, который вращается вместе с валом для обеспечения абсолютной обратной связи по положению. Для считывания этих значений используется декодер с использованием двоичного кода, кода Грея или избыточного кода Грея. Это передается на сервоконтроллер по последовательному каналу.
Для считывания этих значений используется декодер с использованием двоичного кода, кода Грея или избыточного кода Грея. Это передается на сервоконтроллер по последовательному каналу.
Эти системы намного сложнее, чем инкрементальные энкодеры с обратной связью, и всегда будут отслеживать фактическое положение вала.
Кроме того, в случае отключения напряжения питания устройство абсолютной обратной связи никогда не потеряет положение вала и сообщит об этом сервоконтроллеру после восстановления питания. В системе с абсолютной обратной связью нет потери ценности.
Абсолютные энкодеры
Абсолютные энкодеры отслеживают и сохраняют данные о положении, которые затем передаются обратно в контроллер по последовательному каналу. Каждое положение вала или нагрузки маркируется во время вращения, поэтому это положение всегда известно.
Линейные энкодеры могут отслеживать обратную связь напрямую, внедряя энкодер положения на нагрузке, в то время как энкодеры на вращающемся двигателе сообщают обратную связь о положении нагрузки косвенно.
Однооборотные абсолютные энкодеры отслеживают положение для каждого оборота, тогда как многооборотные абсолютные энкодеры используют редукторы для отслеживания количества оборотов.
Это полезно для линейных систем и других приложений, где диапазон движения требует более одного оборота двигателя. Его можно сравнить с механическим одометром в автомобиле.
AMC поддерживает протоколы Hiperface, EnDat и Biss C для абсолютных энкодеров.
Absolute vs. Incremental обратная связь
Абсолютные преимущества обратной связи
- Предоставлены данные о постоянном позиционировании
- Нет.
- Обычно дешевле
- Доступны варианты для более высокого разрешения
- Информация об абсолютном положении не требуется для всех приложений.
Приложения с абсолютной обратной связью
Абсолютная обратная связь предпочтительна для приложений, где необходима информация о положении, а процедура возврата в исходное положение не обязательно может быть выполнена.
 Это касается любого приложения, которое не может совершать полный оборот на 360 градусов, например, коботов или приложений с передаточным числом, отличным от 1:1.
Это касается любого приложения, которое не может совершать полный оборот на 360 градусов, например, коботов или приложений с передаточным числом, отличным от 1:1.Подумайте, как плохо было бы для 3D-принтера с пошаговой обратной связью терять позицию при отключении питания.
The most common applications for absolute encoders include:
- Large antennae
- Telescopes
- 3D printers
- Stabilized cameras
- Automated steering systems
ADVANCED Motion Controls has a variety of different drives for different kinds of Обратная связь. Для получения дополнительной информации или вопросов, касающихся обратной связи по положению, свяжитесь с нами сегодня.
Высокоэффективные и мощные серводвигатели
Серводвигатели существуют уже давно и используются во многих приложениях. Они небольшие по размеру, но обладают большой мощностью и очень энергоэффективны. Эти функции позволяют использовать их для управления игрушечными машинками, роботами и самолетами с дистанционным или радиоуправлением.
 Серводвигатели также используются в промышленности, робототехнике, поточном производстве, фармацевтике и сфере общественного питания. Но как работают маленькие ребята?
Серводвигатели также используются в промышленности, робототехнике, поточном производстве, фармацевтике и сфере общественного питания. Но как работают маленькие ребята?Схема сервопривода встроена прямо в блок двигателя и имеет позиционируемый вал, который обычно снабжен шестерней (как показано ниже). Двигатель управляется электрическим сигналом, который определяет величину движения вала.
Что внутри сервопривода?
Чтобы полностью понять, как работает сервопривод, вам нужно заглянуть под капот. Внутри довольно простая установка: небольшой двигатель постоянного тока, потенциометр и схема управления. Двигатель крепится шестернями к колесу управления. Когда двигатель вращается, сопротивление потенциометра изменяется, поэтому схема управления может точно регулировать степень движения и направление.
Когда вал двигателя находится в нужном положении, подача питания на двигатель прекращается. Если нет, двигатель вращается в соответствующем направлении. Требуемое положение передается с помощью электрических импульсов по сигнальному проводу.
 Скорость двигателя пропорциональна разнице между его фактическим положением и желаемым положением. Таким образом, если двигатель находится рядом с желаемым положением, он будет вращаться медленно, в противном случае он будет вращаться быстро. Это называется пропорциональным управлением. Это означает, что двигатель будет работать ровно столько, сколько необходимо для выполнения поставленной задачи, очень эффективный маленький парень.
Скорость двигателя пропорциональна разнице между его фактическим положением и желаемым положением. Таким образом, если двигатель находится рядом с желаемым положением, он будет вращаться медленно, в противном случае он будет вращаться быстро. Это называется пропорциональным управлением. Это означает, что двигатель будет работать ровно столько, сколько необходимо для выполнения поставленной задачи, очень эффективный маленький парень.Как управляется сервопривод?
Внутренности серводвигателя (левый) и сервопривод в сборе (правый)
Сервоприводы управляются путем отправки электрического импульса переменной ширины или широтно-импульсной модуляции (ШИМ) по проводу управления. Есть минимальный импульс, максимальный импульс и частота повторения. Серводвигатель обычно может поворачиваться только на 90° в любом направлении, что в сумме составляет 180°. Нейтральное положение двигателя определяется как положение, при котором сервопривод имеет одинаковую величину потенциального вращения как по часовой стрелке, так и против часовой стрелки.
ШИМ, отправляемый на двигатель, определяет положение вала на основе длительности импульса, отправляемого по проводу управления; ротор повернется в нужное положение. Серводвигатель ожидает появления импульса каждые 20 миллисекунд (мс), и длина импульса будет определять, насколько далеко повернется двигатель. Например, импульс длительностью 1,5 мс заставит двигатель повернуться на 9положение 0°. Менее 1,5 мс перемещает сервопривод против часовой стрелки к положению 0°, а длительность более 1,5 мс повернет сервопривод по часовой стрелке к положению 180°.Переменная ширина импульса управления положением сервопривода
Когда этим сервоприводам подается команда двигаться, они перемещаются в позицию и удерживают ее. Если внешняя сила давит на сервопривод, когда сервопривод удерживает положение, сервопривод будет сопротивляться перемещению из этого положения. Максимальное усилие, которое может приложить сервопривод, называется номинальным крутящим моментом сервопривода. Однако сервоприводы не будут удерживать свое положение вечно; импульс положения должен повторяться, чтобы заставить сервопривод оставаться на месте.
Однако сервоприводы не будут удерживать свое положение вечно; импульс положения должен повторяться, чтобы заставить сервопривод оставаться на месте.Типы серводвигателей
Серводвигатели бывают разных типов, форм и размеров. Джозеф Факорт впервые использовал термин «сервопривод» в 1859 году, когда использовал пар для управления рулями на корабле. Сервопривод состоит из трех частей: двигателя, устройства обратной связи и управляющей электроники. Серводвигатель является одной из этих трех частей. Если вам нужна обратная связь, вы можете использовать потенциометр, устройство на эффекте Холла, тахометр, резольвер, энкодер, линейный преобразователь или любой другой датчик, который соответствует вашим потребностям. Управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и опорную команду, чтобы убедиться, что серводвигатель работает должным образом, является последними частями сервосистемы.
Они бывают двух типов: переменного и постоянного тока.
 Сервоприводы переменного тока могут справляться с большими скачками тока и обычно используются в промышленных машинах, поэтому их чаще можно найти там. Сервоприводы постоянного тока не рассчитаны на сильные скачки напряжения и обычно лучше подходят для небольших приложений. Как правило, двигатели постоянного тока дешевле, чем их аналоги переменного тока. Некоторые из них также рассчитаны на непрерывное вращение, что упрощает перемещение вашего робота. У них есть два шарикоподшипника на выходном валу, чтобы уменьшить трение и облегчить доступ к потенциометру, который изменяет точку покоя.
Сервоприводы переменного тока могут справляться с большими скачками тока и обычно используются в промышленных машинах, поэтому их чаще можно найти там. Сервоприводы постоянного тока не рассчитаны на сильные скачки напряжения и обычно лучше подходят для небольших приложений. Как правило, двигатели постоянного тока дешевле, чем их аналоги переменного тока. Некоторые из них также рассчитаны на непрерывное вращение, что упрощает перемещение вашего робота. У них есть два шарикоподшипника на выходном валу, чтобы уменьшить трение и облегчить доступ к потенциометру, который изменяет точку покоя.Применение серводвигателя
Сервоприводы используются в радиоуправляемых самолетах для позиционирования управляющих поверхностей, таких как рули высоты, рули направления, шагающий робот или управление захватами . Серводвигатели имеют небольшие размеры, встроенную схему управления и хорошую мощность для своего размера.
В сфере общественного питания и фармацевтики инструменты предназначены для использования в более суровых условиях, где вероятность коррозии высока из-за многократной промывки под высоким давлением и температурой для соблюдения строгих стандартов гигиены.

Всего комментариев: 0