Шаговый двигатель как запустить: Как запустить шаговый двигатель без электроники своими руками
Содержание
Как подключить шаговый двигатель с 4, 6, 8 выводами
Новости
График работы 8 марта 2023 года
Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником — Международным женским днем 8 Марта! 7 марта — рабочий день с 8.00 до 15.30. 8 марта — выходной день.
График работы 23 и 24 февраля 2023 года
Уважаемые покупатели! Обращаем ваше внимание, что 22 февраля рабочий день с 8.00 до 15.30, 23, 24, 25, 26 февраля — выходные дни.
График работы 30 января 2023 г.
Уважаемые покупатели!
В связи с профилактическими работами в понедельник 30 января мы работаем с 12.00.
Благодарим за понимание. Читать все новости
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).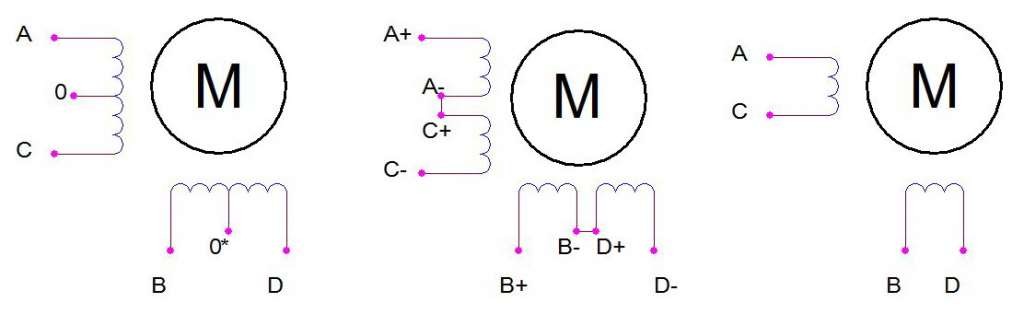
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Наконец, существуют шаговые электродвигатели, подключаемые при помощи 8-ми проводов. Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
- Последовательно соединив обмотки(увеличится индуктивное и активное сопротивление, а также момент, упадет максимальная скорость)
- Параллельно (из-за меньшей индуктивности будет меньше момент и выше скорость)
- Соединив обмотки параллельно, можно использовать униполярное подключение, как для 6-выводного шагового мотора
Ссылки:
Как настроить ЧПУ станок
Униполярный и биполярный шаговый двигатель
DARXTON
Новости
График работы 8 марта 2023 года
Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником — Международным женским днем 8 Марта! 7 марта — рабочий день с 8. 00 до 15.30. 8 марта — выходной день.
00 до 15.30. 8 марта — выходной день.
График работы 23 и 24 февраля 2023 года
Уважаемые покупатели! Обращаем ваше внимание, что 22 февраля рабочий день с 8.00 до 15.30, 23, 24, 25, 26 февраля — выходные дни. Читать все новости
Подключение шагового двигателя: схема подключения
Статьи
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Основы шагового двигателя
Каждый двигатель преобразует энергию. Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Шаговый двигатель не только преобразует электрическую энергию во вращение, но и может очень точно контролировать, как далеко он будет вращаться и как быстро.
Шаговые двигатели названы так потому, что каждый импульс электричества поворачивает двигатель на один шаг. Шаговые двигатели управляются драйвером, который посылает импульсы в двигатель, заставляя его вращаться. Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех самых импульсов.
Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех самых импульсов.
Шаговые двигатели очень просты в управлении. Большинство драйверов ищут 5-вольтовые импульсы, которые являются уровнем напряжения большинства интегральных схем. Вам просто нужно разработать схему для вывода импульсов или использовать один из импульсных генераторов ORIENTAL MOTOR.
Одной из наиболее замечательных особенностей шаговых двигателей является их способность очень точного позиционирования. Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 угловых минуты (0,05°). Однако замечательной особенностью шаговых двигателей является то, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель проходит один шаг, он будет двигаться на 1,8° ± 0,05°. Если тот же мотор пройдет миллион шагов, он пройдет 1 800 000° ± 0,05°. Ошибка не накапливается.
Ошибка не накапливается.
Шаговые двигатели могут быстро реагировать и ускоряться. У них низкая инерция ротора, поэтому они могут быстро набирать скорость. По этой причине шаговые двигатели идеально подходят для коротких и быстрых перемещений.
Система шагового двигателя
На приведенной ниже схеме показана типичная система на основе шагового двигателя. Все эти части должны присутствовать в той или иной форме. Производительность каждого компонента будет влиять на другие.
Первым компонентом является компьютер или ПЛК. Это мозг системы. Компьютер не только управляет системой шагового двигателя, но и остальной частью машины. Он может поднимать лифт или продвигать конвейер. Он может быть как сложным, как ПК или ПЛК, так и простым, как кнопка оператора.
Вторая часть — индексатор или карта ПЛК. Это говорит шаговому двигателю, что делать. Он выдаст правильное количество импульсов, которое двигатель будет перемещать, и изменяет частоту, чтобы двигатель ускорялся, работал на скорости, а затем замедлялся.
Это может быть отдельный компонент, например индексатор ORIENTAL MOTOR SG8030 или плата генератора импульсов, которая вставляется в ПЛК. Форма нематериальна, но она должна присутствовать, чтобы двигатель двигался.
Следующие четыре блока составляют драйвер двигателя. Логика фазового управления принимает импульсы от индексатора и определяет, какая фаза двигателя должна быть включена. Фазы должны быть под напряжением в определенной последовательности, и логика управления фазами позаботится об этом. Источник питания логики представляет собой низкоуровневый источник питания, который питает ИС в драйвере. Это зависит от набора микросхем или дизайна приложения, но большинство источников питания логики находятся в диапазоне 5 вольт. Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности представляет собой набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Все эти компоненты дают команду двигателю перемещать нагрузку. Нагрузкой может быть ходовой винт, диск или конвейер.
Типы шаговых двигателей
В настоящее время существует три основных типа шаговых двигателей.
- Переменное сопротивление (VR)
- Постоянный магнит (ПМ)
- Гибрид
ORIENTAL MOTOR производит только гибридные шаговые двигатели.
Шаговые двигатели с переменным сопротивлением имеют зубья на роторе и статоре, но не имеют магнита. Поэтому он не имеет фиксирующего момента. Постоянный магнит имеет магнит для ротора, но не имеет зубцов. Обычно магнит PM имеет грубые углы шага, но у него есть фиксирующий крутящий момент.
Гибридные шаговые двигатели сочетают в себе магнит от постоянного магнита и зубья от двигателей с переменным сопротивлением. Магнит намагничен в осевом направлении, что означает, что на диаграмме справа верхняя половина представляет собой северный полюс, а нижняя половина — южный полюс. На магните две зубчатые чашки ротора с 50 зубьями. Две чашки смещены на 3,6°, так что если мы посмотрим вниз на ротор между двумя зубцами на чашке северного полюса, мы увидим один зубец на чашке южного полюса прямо посередине.
На магните две зубчатые чашки ротора с 50 зубьями. Две чашки смещены на 3,6°, так что если мы посмотрим вниз на ротор между двумя зубцами на чашке северного полюса, мы увидим один зубец на чашке южного полюса прямо посередине.
Эти двигатели имеют двухфазную конструкцию с 4 полюсами на фазу. Полюса, отстоящие друг от друга на 90°, составляют каждую фазу. Каждая фаза намотана так, что полюса на 180° имеют одинаковую полярность, а полюса на 90° — противоположную полярность. Если бы ток в этой фазе был изменен на противоположный, то изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
На роторе 50 зубьев. Шаг между зубьями составляет 7,2°. При движении двигателя некоторые зубья ротора смещаются с зубьями статора на 3/4 шага зубьев, 1/2 шага зубьев и 1/4 шага зубьев. Когда двигатель шагает, он выбирает самый простой маршрут, поскольку 1/4 от 7,2° составляет 1,8°, двигатель перемещается на 1,8° каждый шаг.
Наконец, крутящий момент и точность зависят от количества полюсов (зубьев). Чем больше полюсов, тем лучше крутящий момент и точность. ORIENTAL MOTOR предлагает шаговые двигатели высокого разрешения. Шаг зубьев этих двигателей вдвое меньше, чем у нашего стандартного двигателя. Ротор имеет 100 зубьев, поэтому угол между зубьями составляет 3,6°. Когда двигатель перемещается на 1/4 шага зуба, он перемещается на 0,9°. Разрешение наших моделей с высоким разрешением в два раза больше, чем у стандартных моделей: 400 шагов на оборот против 200 шагов на оборот.
Меньшие углы шага означают меньшую вибрацию, поскольку мы не делаем так далеко с каждым шагом.
Структура
На рисунке ниже показано поперечное сечение 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов: стакана ротора 1, стакана ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если чашка ротора 1 поляризована на север, чашка ротора 2 будет поляризована на юг.
Статор имеет 10 магнитных полюсов с маленькими зубьями, каждый полюс снабжен обмоткой.
Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов той же полярности, то есть северной или южной.)
Противоположная пара полюсов составляет одну фазу. Поскольку имеется 10 магнитных полюсов, или пять фаз, в этом конкретном двигателе называется 5-фазным шаговым двигателем.
По внешнему периметру каждого ротора имеется 50 зубьев, при этом зубья чашки ротора 1 и чашки ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Скорость-момент
Очень важно, чтобы вы знали, как читать кривую скорость-момент, так как она скажет нам, что двигатель может и не может делать. Кривые скорость-момент представляют данный двигатель и данный привод. Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь очень разную кривую скорости вращения при использовании с другим приводом.
Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь очень разную кривую скорости вращения при использовании с другим приводом.
ORIENTAL MOTOR приводит кривые скорость-момент для справки. Если двигатель используется с аналогичным приводом, с аналогичным напряжением и током, вы должны получить аналогичные характеристики. См. приведенную ниже интерактивную кривую скорость-момент:
Чтение кривой скорость-момент
- Удерживающий момент
Величина крутящего момента, создаваемого двигателем в состоянии покоя, когда через его обмотки протекает номинальный ток. - Пуск/Стоп Область
Значения, при которых двигатель может мгновенно запускаться, останавливаться или реверсировать. - Момент втягивания
Значения крутящего момента и скорости, которые двигатель может запускать, останавливать или реверсировать синхронно с входными импульсами.
- Момент вытягивания
Значения крутящего момента и скорости, при которых двигатель может работать синхронно с входными фазами. Максимальные значения, которые двигатель может обеспечить без остановки. - Максимальная начальная скорость
Максимальная скорость, с которой двигатель может запуститься, измеренная без нагрузки. - Максимальная рабочая скорость
Максимальная скорость вращения двигателя, измеренная без нагрузки.
900 02
Для работы в зоне между втягивающим и вытягивании, двигатель должен сначала запуститься в зоне пуска/останова. Затем частота пульса увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента.
Крутящий момент пропорционален току и количеству витков провода. Если мы хотим увеличить крутящий момент на 20%, мы должны увеличить ток примерно на 20%. Точно так же, если мы хотим уменьшить крутящий момент на 50%, уменьшим ток на 50%.
Из-за магнитного насыщения нет смысла увеличивать ток более чем в 2 раза от номинального. В этот момент увеличение тока не увеличит крутящий момент. При токе, примерно в 10 раз превышающем номинальный, вы рискуете размагнитить ротор.
Все наши двигатели имеют изоляцию класса B и могут выдерживать температуру 130°C до разрушения изоляции. Если мы допускаем разницу температур внутри и снаружи в 30°, температура корпуса не должна превышать 100°C.
Индуктивность влияет на крутящий момент на высоких скоростях. Индуктивность является причиной того, что двигатели не имеют высокой степени крутящего момента до бесконечности. Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, деленная на сопротивление в омах, дает нам значение секунд.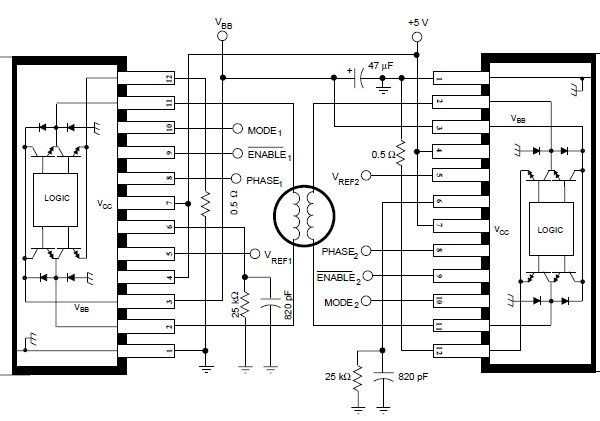 Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
На низких скоростях это не проблема. Ток может входить и выходить из катушек достаточно быстро, поэтому двигатель имеет номинальный крутящий момент. Однако на высоких скоростях ток не может пройти достаточно быстро, пока не переключится следующая фаза. Крутящий момент уменьшается.
Напряжение драйвера играет большую роль в быстродействии. Чем выше отношение напряжения привода к напряжению двигателя, тем лучше производительность на высоких скоростях. Высокие напряжения вызывают ток в обмотках с большей скоростью, чем 63%, упомянутые выше.
Вибрация
Когда шаговый двигатель совершает переход от одного шага к другому, ротор не останавливается мгновенно. ротор фактически проходит конечное положение, оттягивается назад, проходит конечное положение в противоположном направлении и продолжает двигаться вперед и назад, пока, наконец, не остановится (см. интерактивную диаграмму ниже). Мы называем это «звоном», и он возникает при каждом шаге двигателя. Подобно шнуру для банджи, импульс переносит ротор за точку его остановки, затем он «подпрыгивает» вперед и назад, пока, наконец, не остановится. Однако в большинстве случаев двигатель получает команду перейти к следующему шагу, прежде чем он остановится.
На приведенных ниже графиках показан звон при различных условиях нагрузки. Без нагрузки двигатель сильно стучит. Много звонка означает много вибрации. Двигатель часто глохнет, если он не нагружен или слегка нагружен, потому что вибрация настолько высока, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
На двух других графиках показан двигатель с нагрузкой. Правильная загрузка двигателя сгладит его работу. Нагрузка должна составлять от 30% до 70% крутящего момента, который может создать двигатель, а отношение инерции нагрузки к инерции ротора должно составлять от 1:1 до 10:1. Для более коротких и быстрых движений соотношение должно быть ближе к 1:1–3:1.
Специалист по применению ORIENTAL MOTOR и инженеры могут помочь в выборе правильного размера.
Двигатель будет демонстрировать гораздо более сильные вибрации, если частота входных импульсов соответствует собственной частоте двигателя. Это называется резонансом и обычно происходит на частоте около 200 Гц. В резонансе превышение и недорегулирование становятся намного больше, и вероятность пропуска шагов намного выше. Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
2-фазные шаговые двигатели могут пропускать шаги только группами по четыре. Если вы пропускаете шаги, кратные четырем, вибрация вызывает потерю синхронизма или нагрузка слишком велика. Если количество пропущенных шагов не кратно четырем, велика вероятность того, что проблемы вызваны неправильным количеством импульсов или электрическими помехами.
Если количество пропущенных шагов не кратно четырем, велика вероятность того, что проблемы вызваны неправильным количеством импульсов или электрическими помехами.
Есть несколько способов обойти резонанс. Самый простой способ — вообще избежать такой скорости. 200 Гц — это не очень быстро для двухфазного двигателя со скоростью 60 об/мин. Большинство двигателей имеют максимальную начальную скорость около 1000 импульсов в секунду или около того. Таким образом, в большинстве случаев вы можете запустить двигатель на более высокой скорости, чем резонансная скорость.
Если вам нужно начать со скорости ниже резонансной скорости, быстро ускорьтесь через резонансный диапазон.
Другим решением является уменьшение угла шага. Двигатель всегда будет промахиваться и промахиваться больше для больших углов шага. Если двигателю не нужно далеко перемещаться, он не создаст достаточной силы (крутящего момента), чтобы выйти за пределы допустимого диапазона. Каждый раз, когда угол шага уменьшается, мотор не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Убедитесь, что мощность двигателя соответствует нагрузке. Выбрав правильный двигатель, вы можете улучшить производительность.
Также доступны демпферы. Демпферы устанавливаются на задний вал двигателя и поглощают часть энергии колебаний. Они часто сглаживают вибрирующий двигатель недорого.
5-фазные шаговые двигатели
Относительно новая технология шаговых двигателей — 5-фазные. Наиболее очевидная разница между 2-фазным и 5-фазным (см. интерактивную схему ниже) заключается в количестве полюсов статора. В то время как двухфазные двигатели имеют 8 полюсов, по 4 на фазу, пятифазный двигатель имеет 10 полюсов, по 2 на фазу. Ротор такой же, как у двухфазного двигателя.
В то время как двухфазный двигатель перемещается на 1/4 шага зубьев каждую фазу. 5-фазный из-за своей конструкции перемещается на 1/10 шага зуба. Поскольку шаг по-прежнему составляет 7,2°, угол шага составляет 0,72°.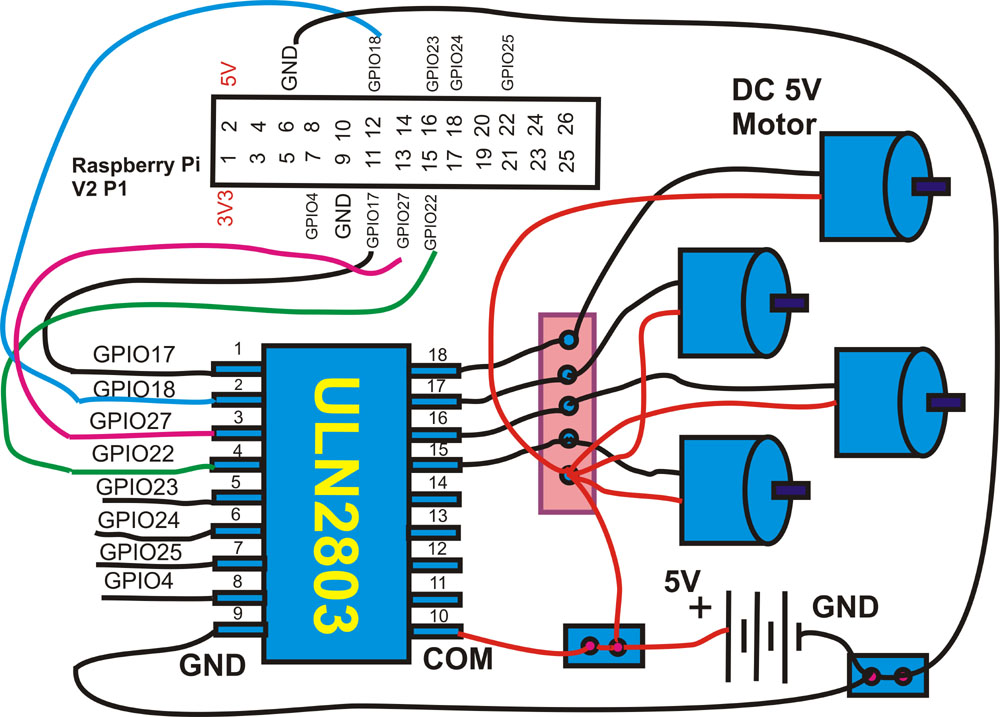 Просто исходя из конструкции, разрешение 5-фазного датчика составляет 500 шагов на оборот, а двухфазного — 200 шагов на оборот. Пятифазный предлагает разрешение в 2,5 раза лучше, чем двухфазный.
Просто исходя из конструкции, разрешение 5-фазного датчика составляет 500 шагов на оборот, а двухфазного — 200 шагов на оборот. Пятифазный предлагает разрешение в 2,5 раза лучше, чем двухфазный.
При более высоком разрешении вы получаете меньший угол шага, что, в свою очередь, снижает вибрацию. Поскольку угол шага у 5-фазного в 2,5 раза меньше, чем у 2-фазного, звон, вибрации значительно ниже. Как в 2-фазном, так и в 5-фазном режиме ротор должен промахиваться или опускаться более чем на 3,6°, чтобы пропускать шаги. Поскольку угол шага 5-фазного двигателя составляет всего 0,72°, для двигателя почти невозможно превышение или недорегулирование на 3,6°. Вероятность потери синхронизма с 5-фазным шаговым двигателем очень мала.
Методы привода
Существует четыре различных метода привода шаговых двигателей:
- Волновой привод (полный шаг)
- 2 фазы включены (полный шаг)
- 1-2 фазы включены (половина шага)
- Микрошаг
Волновой привод
На приведенной ниже диаграмме метод волнового привода упрощен для лучшей иллюстрации теории. На иллюстрации каждый поворот на 90° соответствует 1,8° поворота ротора в реальном двигателе.
На иллюстрации каждый поворот на 90° соответствует 1,8° поворота ротора в реальном двигателе.
В методе волнового привода (также называемом методом однофазного включения) одновременно включается только одна фаза. Когда мы запитываем фазу А от южного полюса, она притягивает северный полюс ротора. Выключаем А и включаем В, ротор поворачивается на 90° (1,8°) и так далее. Каждый раз подается питание только на одну фазу.
Волновой привод имеет четырехступенчатую электрическую последовательность вращения двигателя.
2 фазы включены
В методе «2 фазы включены» две фазы всегда находятся под напряжением.
Еще раз на приведенном ниже рисунке каждые 90° представляют собой поворот на 1,8°. Если обе фазы A и B запитаны как южные полюса, северный полюс ротора будет одинаково притягиваться к обоим полюсам и выстраиваться прямо посередине. По мере того, как на фазы подается питание, ротор будет вращаться, чтобы выровняться между двумя полюсами, находящимися под напряжением.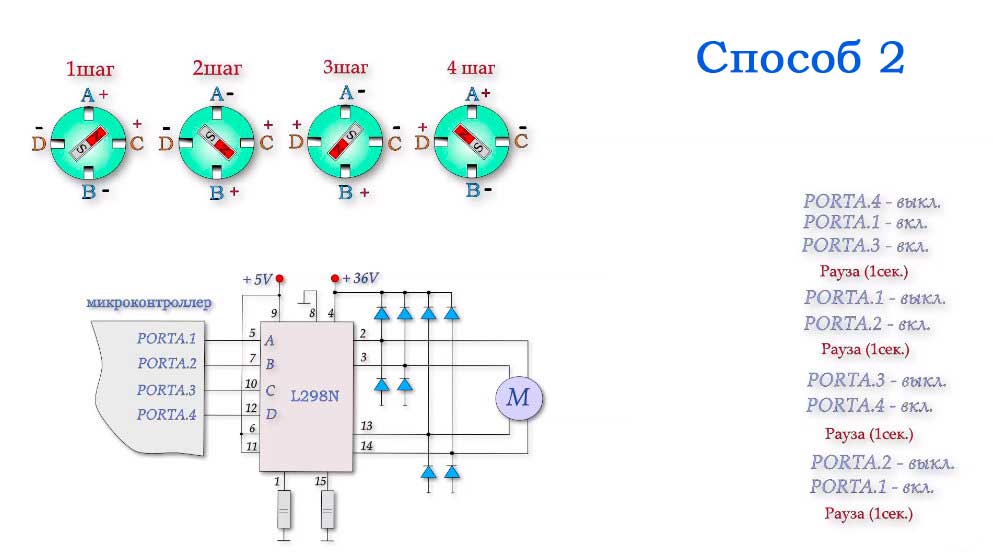
Метод «двухфазного включения» включает четырехступенчатую электрическую последовательность вращения двигателя.
Стандартные 2-фазные и 2-фазные двигатели типа M компании ORIENTAL MOTOR используют метод «2 фазы вкл».
Какое преимущество имеет метод «2 фазы» по сравнению с методом «1 фаза»? Ответ — крутящий момент. В методе «1 фаза включена» одновременно включается только одна фаза, поэтому мы имеем одну единицу крутящего момента, действующую на ротор. В методе «2 фазы включены» у нас есть две единицы крутящего момента, действующие на ротор: 1 в положении на 12 часов и 1 в положении на 3 часа. Если мы сложим эти два вектора крутящего момента вместе, мы получим результат под углом 45°, а величина увеличится на 41,4%. Используя метод «2 фазы вкл.», мы можем получить тот же угол шага, что и метод «1 фаза вкл.», но с крутящим моментом на 41% больше.
Пятифазные двигатели немного отличаются. Вместо того, чтобы использовать метод «две фазы», мы используем метод «четыре фазы».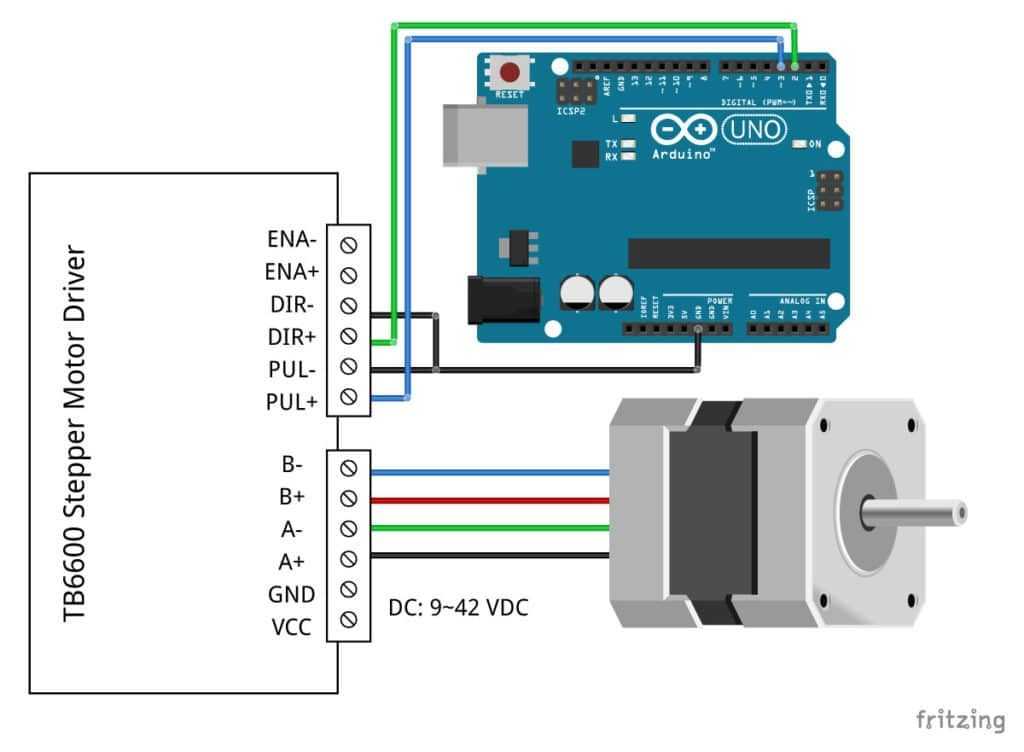 Каждый раз мы включаем 4 фазы и мотор делает шаг.
Каждый раз мы включаем 4 фазы и мотор делает шаг.
Пятифазный двигатель проходит 10-ступенчатую электрическую последовательность.
1-2 фазы включены (полушаг)
Метод «1-2 фазы включен» или полушаг объединяет два предыдущих метода. В этом случае мы запитываем фазу А. Ротор выровняется. В этот момент мы держим фазу А включенной и активируем фазу В. Теперь ротор одинаково притягивается к обеим линиям вверх посередине. Ротор повернулся на 45° (0,9°). Теперь отключаем фазу А, но оставляем включенной фазу В. Мотор делает еще один шаг. И так далее и тому подобное. Чередуя одну фазу и две фазы, мы сократили угол шага вдвое. Помните, что при меньшем угле шага уменьшается вибрация.
(Для 5-фазного двигателя мы чередуем 4 фазы и 5 фаз.)
Полушаговый режим имеет восьмиступенчатую электрическую последовательность. Для пятифазного двигателя в методе «4-5 фаз включено» двигатель проходит 20-ступенчатую электрическую последовательность.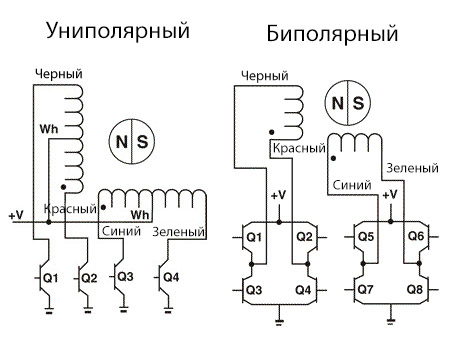
Микрошаг
Микрошаг — это способ сделать маленькие шаги еще меньше. Чем меньше шаг, тем выше разрешение и лучше характеристики вибрации. В микрошаге фаза не полностью включена или полностью выключена. Он частично включен. Синусоидальные волны применяются как к фазе A, так и к фазе B, на расстоянии 90° друг от друга (0,9° в пятифазном шаговом двигателе).
Когда максимальная мощность находится в фазе A, фаза B равна нулю. Ротор выровняется с фазой A. По мере того, как ток в фазе A уменьшается, он увеличивается в фазе B. Ротор будет делать крошечные шаги к фазе B, пока фаза B не достигнет своего максимума, а фаза A не станет нулевой. Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Есть некоторые проблемы, связанные с микрошагом, в основном с точностью и крутящим моментом. Поскольку фазы являются только фазами, только частично запитаны, крутящий момент двигателя снижается, как правило, примерно на 30%. Кроме того, из-за того, что разница крутящего момента между ступенями настолько мала, двигатель иногда не может справиться с нагрузкой. В таких случаях двигателю можно дать команду двигаться на 10 шагов, прежде чем он действительно начнет двигаться. Во многих случаях необходимо замкнуть цикл с помощью энкодеров, которые увеличивают цену.
В таких случаях двигателю можно дать команду двигаться на 10 шагов, прежде чем он действительно начнет двигаться. Во многих случаях необходимо замкнуть цикл с помощью энкодеров, которые увеличивают цену.
Системы шаговых двигателей
- Системы с открытым контуром
- Системы с замкнутым контуром
- Сервосистемы
Разомкнутый контур
Шаговые двигатели спроектированы как система разомкнутого контура. Генератор импульсов посылает импульсы в схему чередования фаз. Секвенсор фаз определяет, какие фазы необходимо отключить или включить, как описано в информации о полном шаге и полушаге. Секвенсор управляет полевыми транзисторами большой мощности, которые затем вращают двигатель.
Однако в системе с разомкнутым контуром нет проверки положения и невозможно узнать, выполнил ли двигатель заданное движение.
Замкнутый контур
Самый популярный метод замыкания контура — установка энкодера на задний вал двухвального двигателя. Кодер представляет собой тонкий диск с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются на контроллер, который ведет их подсчет. Обычно в конце перемещения контроллер сравнивает количество импульсов, отправленных водителю, с количеством импульсов, отправленных энкодером обратно. Обычно записывается процедура, согласно которой, если два числа различны, разница затем компенсируется. Если числа совпадают, ошибки не произошло и движение продолжается.
Кодер представляет собой тонкий диск с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются на контроллер, который ведет их подсчет. Обычно в конце перемещения контроллер сравнивает количество импульсов, отправленных водителю, с количеством импульсов, отправленных энкодером обратно. Обычно записывается процедура, согласно которой, если два числа различны, разница затем компенсируется. Если числа совпадают, ошибки не произошло и движение продолжается.
Этот метод имеет два недостатка: стоимость (и сложность) и отклик. Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку исправление (если оно есть) выполняется в конце хода, в систему может быть добавлено дополнительное время.
Сервосистема
Другим вариантом является сервосистема. Сервосистема, как правило, представляет собой двигатель с малым числом полюсов, обеспечивающий высокую скорость, но не имеющий встроенной функции позиционирования. Чтобы сделать его устройством положения, требуется обратная связь, обычно и энкодер или резольвер, и контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает на основе ошибки. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель включается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается. Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
Чтобы сделать его устройством положения, требуется обратная связь, обычно и энкодер или резольвер, и контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает на основе ошибки. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель включается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается. Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
AlphaStep Системы шаговых двигателей с замкнутым контуром
AlphaStep — революционный шаговый двигатель компании Oriental Motor. AlphaStep имеет встроенный резольвер, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
AlphaStep имеет встроенный резольвер, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
Драйвер AlphaStep имеет входной счетчик. Подсчитываются все импульсы, поступающие на привод. Обратная связь резольвера поступает на счетчик положения ротора. Любое отклонение присутствует в счетчике отклонений. Обычно двигатель работает в разомкнутом контуре. Мы делаем векторы крутящего момента, и двигатель следует за ними. Если счетчик отклонения показывает что-то большее, чем ± 1,8°, то фазовращатель включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронное состояние. Если двигатель отключен на несколько ступеней, секвенсор активирует несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель выдерживает перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Отличительной особенностью AlphaStep является то, что он корректирует пропущенные шаги на лету. Он не ждет до конца движения, чтобы внести исправления. Как только ротор возвращается в пределах 1,8 °, драйвер возвращается в режим разомкнутого контура и посылает правильные фазы питания.
На приведенном ниже графике показана кривая смещения крутящего момента, когда блок находится в режиме разомкнутого или замкнутого контура. Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8°. Двигатель может пропустить шаг только в том случае, если он промахивается более чем на 3,6°. Поскольку водитель берет на себя управление вектором крутящего момента, когда он отклоняется на 1,8°, двигатель не может пропускать шаги, за исключением случаев, когда он перегружен более чем на 5 секунд.
Многие думают, что точность шага AlphaStep составляет ± 1,8°. Точность шага AlphaStep составляет 5 угловых минут (0,083°). Водитель управляет векторами крутящего момента за пределами 1,8°. Оказавшись внутри 1,8°, зубья ротора выровняются с вектором создаваемого крутящего момента. AlphaStep следит за тем, чтобы правильный зуб совпадал с вектором крутящего момента.
Водитель управляет векторами крутящего момента за пределами 1,8°. Оказавшись внутри 1,8°, зубья ротора выровняются с вектором создаваемого крутящего момента. AlphaStep следит за тем, чтобы правильный зуб совпадал с вектором крутящего момента.
AlphaStep доступен во многих версиях. ORIENTAL MOTOR предлагает версии с круглым валом и редуктором с несколькими передаточными числами для увеличения разрешения и крутящего момента или для уменьшения отраженной инерции. Почти все версии могут быть оснащены отказоустойчивым магнитным тормозом. ORIENTAL MOTOR также имеет версию 24 В постоянного тока, называемую серией ASC.
Заключение
Таким образом, шаговые двигатели отлично подходят для позиционирования. Шаговые двигатели можно точно контролировать как по расстоянию, так и по скорости, просто изменяя количество импульсов и их частоту. Их большое количество полюсов дает им точность, и в то же время они работают без обратной связи. Если размер шагового двигателя подобран правильно для приложения, шаговый двигатель никогда не пропустит ни одного шага. А поскольку им не нужна позиционная обратная связь, они очень экономичны.
А поскольку им не нужна позиционная обратная связь, они очень экономичны.
Все, что вам нужно знать о шаговых двигателях
Это руководство является частью нашего центра промышленной автоматизации , где вы можете узнать больше об искусственном интеллекте, автоматизации и управлении.
В этом руководстве мы кратко рассмотрим, как именно работает шаговый двигатель, прежде чем перейти к рассмотрению некоторых из наиболее распространенных примеров, доступных на рынке, и многочисленных видов повседневных ролей, которые они выполняют. лучше всего подходит для.
Что такое шаговый двигатель?
Шаговый двигатель – это тип бесщеточного синхронного двигателя постоянного тока, который, в отличие от многих других стандартных типов электродвигателей , не просто непрерывно вращается в течение произвольного числа оборотов, пока не будет отключено постоянное напряжение, подаваемое на него.
Вместо этого шаговые двигатели представляют собой тип цифрового устройства ввода-вывода для точного пуска и останова. Они сконструированы таким образом, что ток, проходящий через них, попадает на серию катушек, расположенных по фазам, которые можно включать и выключать в быстрой последовательности. Это позволяет двигателю совершать часть оборота за раз — и эти отдельные заранее определенные фазы мы называем «шагами».
Они сконструированы таким образом, что ток, проходящий через них, попадает на серию катушек, расположенных по фазам, которые можно включать и выключать в быстрой последовательности. Это позволяет двигателю совершать часть оборота за раз — и эти отдельные заранее определенные фазы мы называем «шагами».
Шаговый двигатель предназначен для разбиения одного полного оборота на несколько гораздо меньших (и практически равных) частичных оборотов. В практических целях их можно использовать для указания шаговому двигателю двигаться на заданные градусы или углы поворота. Конечным результатом является то, что шаговый двигатель можно использовать для передачи мельчайших точных движений механическим частям, требующим высокой степени точности.
Шаговые двигатели обычно имеют цифровое управление и являются ключевыми компонентами системы позиционирования с управлением движением без обратной связи. Они чаще всего используются в приложениях удержания или позиционирования, где их способность устанавливать гораздо более четко определенные положения вращения, скорости и крутящие моменты делают их идеально подходящими для задач, требующих чрезвычайно строгого контроля движения.
Просмотреть все шаговые двигатели
Как работают шаговые двигатели?
В обычном щеточном двигателе постоянного тока напряжение подается на клеммы, что, в свою очередь, заставляет проволочную катушку вращаться со скоростью внутри корпуса с фиксированным магнитом («статор»).
В этой установке катушка с вращающейся проволокой («ротор») фактически становится электромагнитом и быстро вращается в центре двигателя на основе знакомого принципа магнитного притяжения и отталкивания. Комбинация щеток (электрических контактов) и поворотного электрического переключателя, известного как коммутатор, позволяет быстро менять направление тока, идущего к проволочной катушке. Это создает непрерывное однонаправленное вращение катушки ротора до тех пор, пока на сборку подается достаточное напряжение.
Потенциальным недостатком этого типа двигателя является то, что он вращается непрерывно и делает произвольное количество оборотов, пока не отключится питание. Из-за этого очень сложно контролировать точную точку остановки двигателя, что делает его непригодным для приложений, требующих более точного управления. Ручное управление включением/выключением подачи мощности на двигатель не может обеспечить требуемую точность старт-стоп для выполнения движений с точностью до минуты.
Из-за этого очень сложно контролировать точную точку остановки двигателя, что делает его непригодным для приложений, требующих более точного управления. Ручное управление включением/выключением подачи мощности на двигатель не может обеспечить требуемую точность старт-стоп для выполнения движений с точностью до минуты.
В шаговом двигателе установка совсем другая. Вместо ротора с проволочной катушкой, вращающегося внутри неподвижного корпуса магнитов, шаговые двигатели построены с фиксированным корпусом из проволоки (в данном случае статором), расположенным вокруг ряда «зубчатых» электромагнитов, вращающихся в центре. Шаговый двигатель преобразует пульсирующий электрический ток, управляемый Драйвер шагового двигателя , в точные одношаговые движения этого зубчатого компонента, похожего на шестерню, вокруг центрального вала.
Каждый из этих импульсов шагового двигателя перемещает ротор на один точный и фиксированный шаг полного оборота. Поскольку ток переключается между проволочными катушками, расположенными последовательно вокруг двигателя, вращающаяся часть может совершать полные или частичные обороты по мере необходимости, или ее можно заставить очень резко останавливаться на любом из шагов вокруг ее вращения.
В конечном счете, реальная сила шагового двигателя по сравнению с обычными коллекторными двигателями постоянного тока заключается в том, что они могут быстро позиционировать себя в известном и повторяемом положении или интервале, а затем удерживать это положение столько времени, сколько требуется. Это делает их чрезвычайно полезными в высокоточных приложениях, таких как робототехника и печать. Компания Learn Engineering создала приведенное ниже видео, демонстрирующее работу шагового двигателя:
Типы шаговых двигателей
Продается множество типов шаговых двигателей, и знание того, что делает каждый из различных типов, поможет вам решить, какой тип лучше всего подходит для вашего приложения.
Биполярный шаговый двигатель
Биполярный шаговый двигатель имеет встроенный драйвер, который использует схему Н-моста для реверсирования тока, протекающего по фазам. При подаче питания на фазы при смене полярности все катушки можно заставить работать, вращая двигатель.
При подаче питания на фазы при смене полярности все катушки можно заставить работать, вращая двигатель.
С практической точки зрения это означает, что обмотки катушки лучше используются в биполярном, чем в стандартном униполярном шаговом двигателе (который использует только 50% проволочных катушек в любой момент времени), что делает биполярные шаговые двигатели более мощными и эффективными в работе. . Хотя биполярные шаговые двигатели технически более сложны в управлении, они, как правило, имеют встроенный чип драйвера, который обрабатывает большую часть необходимых инструкций и действий.
Недостатком является то, что изначально они обычно дороже, чем стандартные монополярные версии, потому что 9Униполярные шаговые двигатели 0077 не требуют реверсирования тока для выполнения шаговых функций — это делает их внутреннюю электронику намного проще и дешевле в производстве.
Магазин биполярных шаговых двигателей
Гибридный шаговый двигатель
Гибридные шаговые двигатели обеспечивают еще большую точность благодаря таким методам, как полушаг и микрошаг. Микрошаг — это способ увеличения фиксированного количества шагов в двигателе путем программирования драйвера для отправки на катушки переменного синусоидального/косинусоидального сигнала. Это часто означает, что шаговые двигатели можно настроить так, чтобы они работали более плавно и точно, чем при стандартной настройке.
Микрошаг — это способ увеличения фиксированного количества шагов в двигателе путем программирования драйвера для отправки на катушки переменного синусоидального/косинусоидального сигнала. Это часто означает, что шаговые двигатели можно настроить так, чтобы они работали более плавно и точно, чем при стандартной настройке.
Гибридные шаговые двигатели обычно имеют полюса или зубья, которые смещены на двух разных чашках снаружи магнитного ротора. Это также означает более точное управление шагами и вращением, а также более тихую работу, более высокое отношение крутящего момента к размеру и более высокие выходные скорости, чем стандартные шаговые двигатели.
Магазин гибридных шаговых двигателей
Для чего используется шаговый двигатель?
Шаговые двигатели имеют широкий спектр применений во многих отраслях и дисциплинах, при этом некоторые из наиболее распространенных применений:
- Компьютеры
- Робототехника
- Камеры
- Печать и сканирование, в том числе на 3D-принтерах
- Автоматизация процессов и упаковочное оборудование
- Позиционирование пилотных ступеней клапана для систем управления жидкостью
- Оборудование для точного позиционирования
В этом разделе мы более подробно рассмотрим некоторые из этих повседневных приложений.
Шаговые двигатели для 3D-принтеров
Общие списки деталей для 3D-принтеров почти всегда включают шаговый двигатель с тем или иным описанием. Это связано с тем, что использование шагового двигателя в 3D-принтере является высокоточным и экономичным способом выполнения очень точных действий и вращений, когда принтер пытается преобразовать информацию с цифровых сканов в физические 3D-объекты.
Шаговые двигатели и драйверы в 3D-принтерах обеспечивают строго контролируемое движение по осям X, Y и Z как по отдельности, так и одновременно, а это означает, что исключительная точность движения и позиционирования достижима без использования энкодеров и другого дополнительного программного обеспечения или датчиков. .
Большинство 3D-принтеров включают в себя несколько шаговых двигателей — они обычно находятся как на самих платформах для сборки, так и в экструдерах нитей, где они используются для протягивания нити и контроля постоянной и равномерной подачи материала в машину на протяжении всего процесса. полная продолжительность тиража.
полная продолжительность тиража.
Шаговые двигатели для ЧПУ
Шаговые двигатели являются альтернативой серводвигателям для питания большинства типов станков с ЧПУ. Приложения ЧПУ включают в себя очень широкий спектр производственных процессов, в которых предварительно запрограммированное компьютерное программное обеспечение управляет работой и физическим перемещением станков в заводских и производственных условиях.
Хотя шаговые двигатели в приложениях с ЧПУ часто рассматриваются как более «бюджетная» альтернатива серводвигателям , это упрощение, основанное на знании старых технологий, которые сегодня не всегда точны. Шаговые двигатели действительно обычно дешевле серводвигателей той же мощности, но современные версии, как правило, столь же универсальны. В результате шаговые двигатели стали гораздо более доступными и используются в гораздо более широком спектре машин и систем, от станков до настольных компьютеров и автомобилей.
Шаговые двигатели с ЧПУ также имеют одно очень важное преимущество перед серводвигателями, заключающееся в том, что им не требуется энкодер. Серводвигатели по своей природе более сложны для понимания и эксплуатации, чем версии с шаговыми двигателями, и часть этой сложности заключается в том, что они включают в себя энкодер, который более подвержен отказам, чем большинство компонентов надежного в остальном серводвигателя. Шаговым двигателям не нужен энкодер, что теоретически делает их более надежными, чем сервоприводы.
Серводвигатели по своей природе более сложны для понимания и эксплуатации, чем версии с шаговыми двигателями, и часть этой сложности заключается в том, что они включают в себя энкодер, который более подвержен отказам, чем большинство компонентов надежного в остальном серводвигателя. Шаговым двигателям не нужен энкодер, что теоретически делает их более надежными, чем сервоприводы.
Кроме того, тот факт, что шаговые двигатели также являются бесщеточными (в отличие от серводвигателей), означает, что они не требуют регулярной плановой замены при условии, что их подшипники остаются в хорошем рабочем состоянии.
Шаговые двигатели для Raspberry Pi
Шаговые двигатели — чрезвычайно распространенное периферийное устройство для добавления к одноплатным вычислительным модулям Raspberry Pi для домашних энтузиастов, изучающих основы базовых навыков компьютерного программирования.
Стартовые комплекты Raspberry Pi обычно продаются в очень простой конфигурации, при этом идея состоит в том, что отдельный пользователь будет добавлять любые дополнительные компоненты в свою систему в том порядке, в котором он хочет узнать о них, добавляя к своему набору навыков, изучая для управления новыми компонентами с помощью языков программирования, таких как Python.
В сообществе пользователей Raspberry Pi обучение манипулированию и управлению небольшими недорогими шаговыми двигателями очень часто рассматривается как логичный следующий шаг после обучения управлению циклами включения/выключения светодиодов и другими простыми типами переключателей или зуммеров. По сути, последовательно соединив пару таких шаговых двигателей, домашние любители могут приступить к созданию простого и программируемого робота.
На рынке Великобритании доступно множество подходящих типов шаговых двигателей для такого типа приложений, начиная с очень недорогих версий на 5 В, которые легко соединяются с разъемами на материнской плате Raspberry Pi.
Шаговые двигатели для камер
Шаговые двигатели широко используются в различных приложениях в высокотехнологичных камерах. Они используются как для управления высокоточными внутренними компонентами, такими как настройки автофокуса и диафрагмы в объективе, так и в корпусах и внешней механике камер безопасности и систем удаленного мониторинга.
В частности, шаговые двигатели и моторизованные ползунки камеры обеспечивают очень плавную работу устройств позиционирования камеры, а это означает, что кадры, снятые с устройств безопасности, могут быть надежно защищены от потенциально проблематичного искажения изображения, вызванного физическим движением камеры вокруг ее поля зрения. вид.
Шаговые двигатели обладают рядом других привлекательных особенностей для использования в системах позиционирования камер и систем видеонаблюдения, включая полный крутящий момент в состоянии покоя, чрезвычайно точное и мгновенное время отклика для всех входных сигналов движения, постоянную повторяемость заранее определенных движений и простое управление без обратной связи, определяемое фиксированные размеры шага.
Резюме
Шаговые двигатели — невероятно универсальный, надежный, экономичный и точный способ управления точными движениями двигателей, позволяющий пользователям повысить ловкость и эффективность запрограммированных движений в самых разных областях применения и отраслях.
Всего комментариев: 0