Устройство шагового двигателя с постоянными магнитами: Статья о шаговых двигателях с постоянными магнитами
Содержание
Шаговые двигатели (Лекция 27)
§ 3.1. Общие сведения о шаговых двигателях
В современных системах управления широко используются устройства, оперирующие с цифровой
формой сигнала. Цифровая форма представления сигнала привела к созданию нового
типа двигателей – шаговых двигателей (ШД).
Шаговые двигатели – это электромеханические
устройства, преобразующие сигнал управления в угловое (или линейное)
перемещение ротора с фиксацией его в заданном положении без устройств обратной
связи.
Современные ШД являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а
частотным пуском ШД. Роторы могут быть возбужденными (активными) и
невозбужденными (пассивными).
Рассмотрим принцип действия простейшего однофазного шагового двигателя.
Двухполюсный ротор из магнитомягкой стали с клювообразными выступами
помещен в четырехполюсный статор (рис.3.1). Одна пара полюсов выполнена из
постоянных магнитов, на другой – находится обмотка управления.
Пока тока в обмотках управления нет, ротор ориентируется вдоль
постоянных магнитов и удерживается около них с определенным усилием, которое
определяется магнитным потоком полюсов Фпм.
При подаче постоянного напряжения на обмотку управления возникает
магнитный поток Фу примерно вдвое больший, чем
поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого
этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент,
развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами
управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к.
магнитное сопротивление между статором и ротором в этом направлении меньше, чем
в обратном.
Рис. 3.1. Схема простейшего однофазного ШД
Следующий управляющий импульс отключает напряжение с обмотки управления
и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов.
Достоинством однофазных ШД с постоянными магнитами является простота
конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке
управления не требуется потребление энергии, угол поворота сохраняет свое
значение и при перерывах в питании. Двигатели этого типа отрабатывают импульсы
с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
§ 3.2. Реверсивные шаговые двигатели
Для осуществления реверса зубцы статора и ротора ШД должны быть
симметричными (без клювообразных выступов). Рассмотрим работу двухфазного
двухполюсного ШД с активным ротором в виде постоянного магнита. Будем считать,
что намагничивающие силы фаз (НС) распределены по синусоидальному закону.
При включении фазы под постоянное напряжение (условно положительной
полярности) вектор НС статора совпадет с осью фазы А. В результате
взаимодействия НС статора с полем постоянного магнита ротора возникнет
синхронизирующий момент Мс = Mmaxsinq, где q — угол
между осью ротора и вектором НС.
При отсутствии тормозного момента ротор займет положение, при котором
его ось совпадет с осью фазы А (рис. 3.2, первый
такт). Если теперь отключить фазу А и включить фазу В, вектор НС
и ротор повернуться на 90о(второй такт на рис. 3.2). При
включении фазы А на напряжение обратной полярности (третий такт на рис.
3.2) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз
ротор будет отставать от вектора НС на некоторый угол qн= arcsin(Mн/Mmax).
Рис. 3.2. Устойчивые положения ротора при включении фаз
Рассмотренный способ переключения обмоток можно представить в виде табл.1
Таблица 1
Полярность импульсов | Такты коммутации
| |||
1 | 2 | 3 | 4 | |
|
+UA | ||||
+UB
| ||||
-UA
| ||||
|
-UB
| ||||
Такой же шаг двигателя, но в раз большое значение намагничивающей силы (и
соответственно синхронизирующего момента) можно получить при одновременном
переключении двух обмоток по алгоритму, показанному в табл. 2
2
Таблица 2
|
Полярность
импульсов | Такты
| |||
|
1 | 2 | 3 | 4 | |
+UA |
X |
|
|
X |
+UB |
X |
X |
|
|
-UA |
|
X |
X |
|
-UB |
|
|
X |
X |
Шаг двигателя можно уменьшить в 2 раза, если обмотки переключать в
соответствии с табл.3
Таблица 3
Полярность импульсов | Такты коммутации | |||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
+UA |
X |
X |
|
|
|
|
|
X |
+UB |
|
X |
X |
X |
|
|
|
|
-UA |
|
|
|
X |
X |
X |
|
|
-UB |
|
|
|
|
|
X |
X |
X |
В зависимости от типа электронного коммутатора управление ШД может быть:
·одноплярным или разнополярным;
·симметричным или несимметричным;
·потенциальным или импульсным.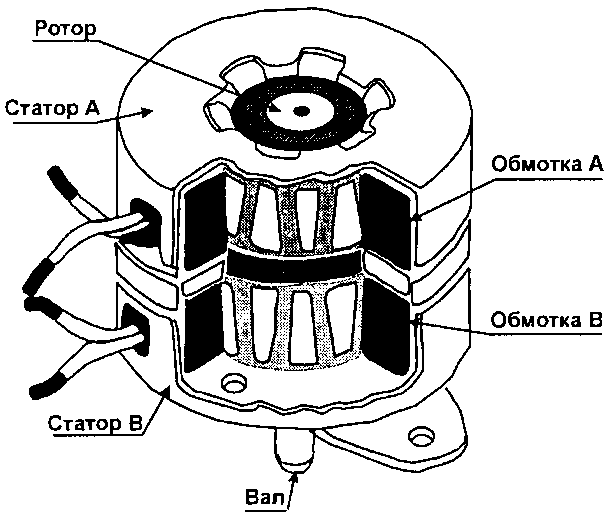
При однополярном управлении напряжение каждой фазе изменяется от 0 до
+U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте
коммутации задействуется одинаковое число обмоток, и несимметричным –
если разное. Способы переключения обмоток, соответствующие тал. 1 и 2 будут
симметричными, а по табл.3 – несимметричным.
При потенциальном управлении напряжение на обмотках изменяется только в
моменты поступления управляющих импульсов. При отсутствии управляющего сигнала
обмотка или группа обмоток находятся под напряжением, а положение ротора
фиксируется полем обмоток. При импульсном управлении напряжение на обмотки
подается только на время отработки шаг, после чего оно снимается и ротор
удерживается в заданном положении либо реактивным моментом, либо внешним
фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного
оборота ротора n следующее (m — число фаз):
1. при однополярной коммутации и
при однополярной коммутации и
симметричном управлении n = m;
2.при разнополярной коммутации с
симметричным управлением n = 2m;
3.при несимметричной
разнополярной коммутации n = 4m.
Очевидно, что несимметричная коммутация возможно только при m ³ 2.
В многополюсных ШД число устойчивых положений возрастает
пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол
поворота ротора, соответствующий одному управляющему импульсу (угол между двумя
соседними устойчивыми состояниями)
Для рассмотренных двигателей р = 1, m = 2 (в первом двигателе
одному такту соответствует действие возбужденных полюсов, а другому, при отключении
обмотки, – действие полюсов с постоянными магнитами). Следовательно, при
разнополярной симметричной коммутации шаг двигателейa = 90o. При несимметричной разнополярной коммутации a = 45o.
Если в двухфазном двигателе выполнить выводы средних точек, он
фактически превращается в четырехфазный ШД (рис.3.3). В отличие
от двигателей с обычной двухфазной обмоткой, питаемой разнополярными
импульсами, данный двигатель можно питать однополярными импульсами, что
значительно упрощает коммутатор, хотя и приводит к несколько худшему
использованию материалов.
Рис.3.3. Схема обмоток и порядок коммутации 4-х фазного ШД
Магнитоэлектрические ШД удается выполнить с шагом до 15о.
Дальнейшее уменьшение шага ограничено технологическими трудностями создания
ротора в виде постоянного магнита с числом пар полюсов больше шести.
Гораздо более мелкий шаг (до долей градуса) можно получить в
редукторных (индукторных) ШД. Индукторные ШД выполняются с числом фаз m
= 2¸4. Они имеют зубчатый ротор с равномерно
расположенными zp зубцами и гребенчатые зоны статора,
смещенные относительно друг друга на угол 2p/(mzp) (например, рис.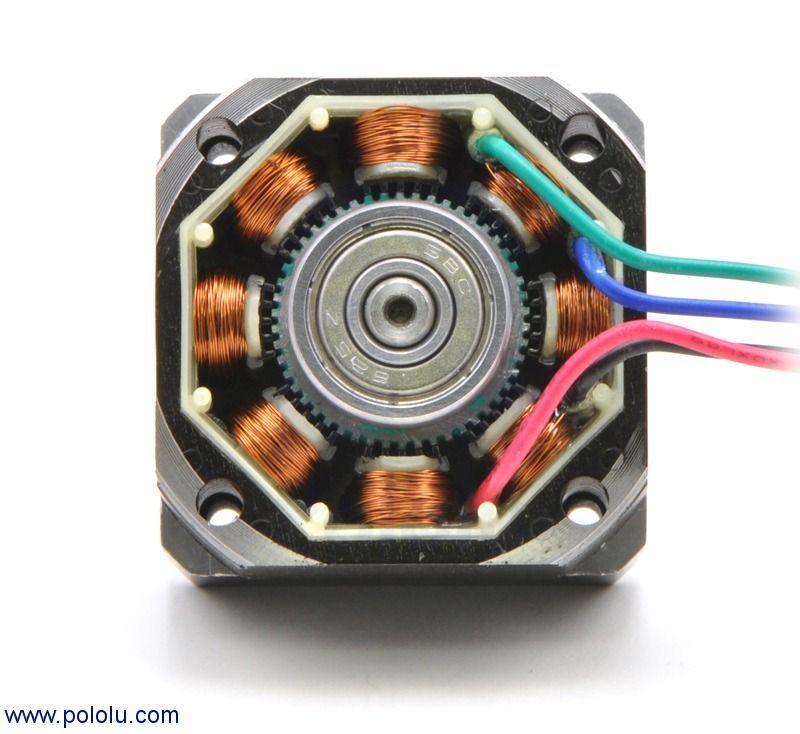 3.4). Число пазов статора и ротора, их геометрические
3.4). Число пазов статора и ротора, их геометрические
размеры выбираются такими, чтобы обеспечить необходимую величину шага и
синхронизирующего момента при заданном виде коммутации токов.
Рис. 3.4. Геометрия магнитной системы индукторного ШД
Основной особенностью индукторных двигателей является то, что магнитное
поле в зазоре содержит постоянную и переменную составляющие. Постоянная
составляющая поля возбуждается либо постоянной составляющей тока обмоток
управления – у двигателей с самовозбуждением, либо специальной обмоткой
возбуждения – у двигателей с независимым возбуждением, либо постоянными
магнитами – у магнитоэлектрических двигателей. Переменная составляющая
магнитного поля создается импульсами тока обмоток управления, поступающими от
электронного коммутатора.
Далее…
Устройство шагового двигателя
Шаговый электродвигатель относится к виду электрических машин постоянного тока. Принцип действия шагового электродвигателя основан на способе преобразования импульсной электрической энергии в механическое дискретное перемещение.
Принцип действия шагового электродвигателя основан на способе преобразования импульсной электрической энергии в механическое дискретное перемещение.
Шаговые электродвигатели классифицируются как бесколлекторные двигатели с высокой степенью надежности и большим сроком службы. Особенности этого типа электродвигателей делают их пригодными к эксплуатации даже в самых сложных производственных условиях.
Отличительной особенностью шаговых двигателей является большое значение крутящего момента на низких скоростях, в то время как в коллекторных двигателях значение крутящего момента возрастает только при увеличении скорости.
Конструкция шагового электродвигателя предполагает наличие более сложной схемы управления, обеспечивающей коммутацию обмоток, в сравнении с другими электродвигателями постоянного тока.
Шаговые электродвигатели подразделяются на три вида: с постоянными магнитами; с переменным магнитным сопротивлением; гибридные.
Двигатели с постоянными магнитами
Электродвигатели с постоянными магнитами включают в себя статор с обмотками и ротор, в конструкцию которого входят постоянные магниты.
Статор в таком электродвигателе имеет два противоположных полюса, на каждом из которых имеется независимая обмотка. При подаче электропитания в одну из обмоток ротор перемещается в положение, при котором его полюса располагаются напротив разноименных полюсов статора. Непрерывное вращение ротора достигается попеременным включением фаз.
Шаговые электродвигатели с постоянными магнитами, в силу конструктивных особенностей, подвержены влиянию обратной ЭДС, которая наводится в роторе и ограничивает скорость его вращения.
Высокая скорость вращения ротора возможна в электродвигателях, с переменным магнитным сопротивлением.
Двигатели с переменным магнитным сопротивлением
Статор шагового электродвигателя с переменным магнитным сопротивлением содержит несколько пар полюсов. Полюса каждой пары расположены напротив друг друга и имеют независимые одноименные обмотки.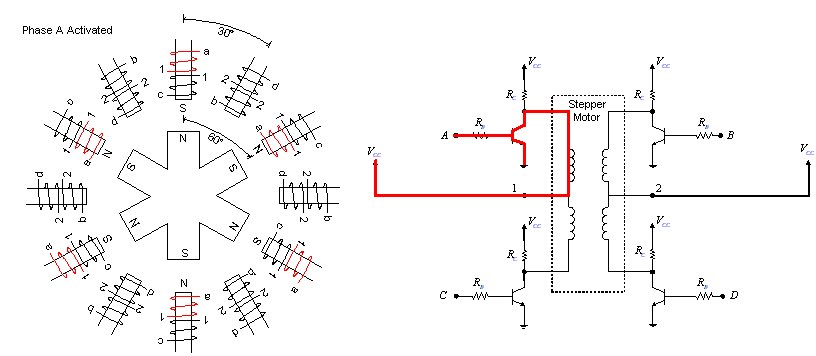 Ротор оборудован зубцами, сделанными из мягкого магнитного материала.
Ротор оборудован зубцами, сделанными из мягкого магнитного материала.
При подаче электропитания в одну из пар обмоток ротор перемещается в положение, при котором его зубцы располагаются напротив запитанных обмоток статора. При подаче электропитания на другую пару обмоток ротор перемещается в положение, при котором его зубцы располагаются напротив запитанной пары, и вновь замыкают магнитный поток. Непрерывное вращение ротора достигается попеременным включением фаз.
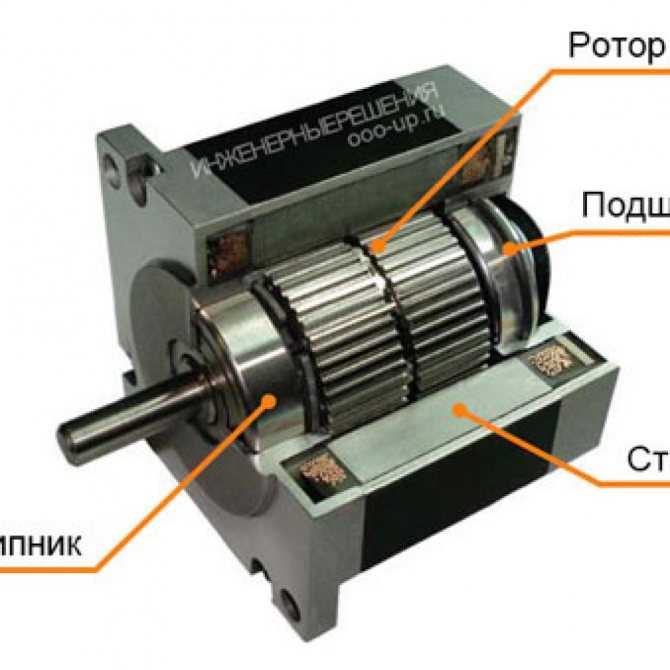
Гибридные шаговые двигатели
Гибридные шаговые электродвигатели имеют конструкцию, сочетающую в себе преимущества двух предыдущих типов электродвигателей. Гибридные электродвигатели являются более скоростными и обеспечивают шаг малой величины. Однако стоимость этих электродвигателей выше.
Ротор гибридного электродвигателя состоит из двух частей зубчатой формы, разделенных между собой цилиндрическим постоянным магнитом. Зубцы каждой составной части ротора являются одноименными полюсами: северными или южными. Угол поворота составных частей ротора относительно друг друга равен половине шагового угла зубцов.
Угол поворота составных частей ротора относительно друг друга равен половине шагового угла зубцов.
Все зубчатые полюса ротора выполнены в виде пакетов пластин. Такая конструкция способствует снижению потерь, связанных с вихревыми токами.
Конструкция статора также содержит зубчатые полюсные наконечники для обеспечения нужного количества полюсов, эквивалентных роторным, при этом обмотками оборудованы только основные полюса.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток шаговые электродвигатели могут быть биполярными и униполярными.
Биполярным называется электродвигатель, у которого каждая фаза оборудована только одной обмоткой, а переключение обмоток изменяет направление магнитного поля.
Униполярным называется электродвигатель, у которого каждая фаза также оборудована только одной обмоткой, но выводы сделаны от середины каждой обмотки. Переключение половинок обмотки изменяет направление магнитного поля.
Шаговыми электродвигатели оборудуются многие устройства: офисная техника (принтеры, факсы, сканеры и т. д), специальное промышленное оборудование, различные периферийные технические устройства.
д), специальное промышленное оборудование, различные периферийные технические устройства.
PM vs VR vs Hybrid
На рынке доступны три основных типа шаговых двигателей: тип PM (постоянный магнит), тип VR (переменное сопротивление) и гибридный тип. Каковы различия, какой из них следует использовать и как они работают?
Давайте быстро рассмотрим, что делает шаговый двигатель. Шаговые двигатели вращаются с определенным приращением «шагов» без обратной связи с энкодером или сложных ПИД-контуров. Величина и скорость вращения легко регулируются количеством импульсов и частотой, а шаговый двигатель обеспечивает высокую точность остановки с точностью ±3 угловых минуты (±0,05°). Удерживающий момент создается без электромагнитного тормоза, когда шаговый двигатель включен, но находится в состоянии покоя. Они идеально подходят для недорогих приложений, где двигатели должны точно останавливаться и обеспечивать удерживающий момент.
Конструкция шагового двигателя влияет на его характеристики. В ближайшие несколько минут я расскажу о трех типах шаговых двигателей, представленных на рынке, и о том, почему один из них предпочтительнее других.
В ближайшие несколько минут я расскажу о трех типах шаговых двигателей, представленных на рынке, и о том, почему один из них предпочтительнее других.
PM «Постоянный магнит» Тип
Это шаговый двигатель, ротор которого состоит из двух роторов с постоянными магнитами, слегка смещенных друг относительно друга. Постоянный магнит намагничен в осевом направлении; это означает, что северный и южный полюса чередуются и находятся на одной оси с валом двигателя. Когда ток подается на обмотки, полюса статора намагничиваются и совпадают с противоположными полюсами ротора с постоянными магнитами. Например, северные полюса будут располагаться прямо напротив южных полюсов.
Широко используемый шаговый двигатель с постоянными магнитами представляет собой двухфазный кулачковый двигатель, как показано ниже.
На изображении ниже показаны ротор и статор, в которых протекает ток, так что полюс A1 намагничен к южному полюсу, а полюс A2 намагничен к северному полюсу, поэтому притягиваются противоположные полюса.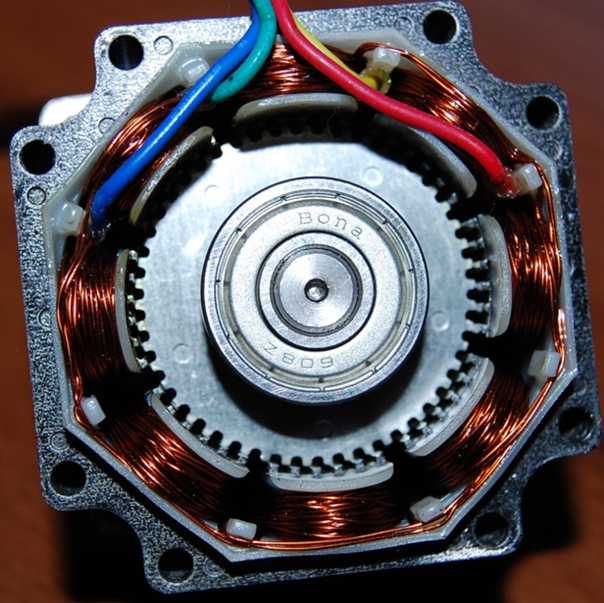 от постоянных магнитов ротора. Если ток переключить с фазы А на фазу В, чтобы намагнитить В1 к южному полюсу, а В2 к северному полюсу, ротор повернется на 90° по часовой стрелке.
от постоянных магнитов ротора. Если ток переключить с фазы А на фазу В, чтобы намагнитить В1 к южному полюсу, а В2 к северному полюсу, ротор повернется на 90° по часовой стрелке.
Угол шага представлен следующим образом с использованием количества полюсов ротора (Np) и количества фаз (Nphase). Если количество полюсов или количество фаз увеличится, угол шага уменьшится. Однако по мере увеличения числа полюсов магнитная сила и крутящий момент также становятся слабее.
Шаговый двигатель с постоянными магнитами прост по конструкции и недорог в производстве. Постоянные магниты позволяют шаговым двигателям типа PM развивать более высокий крутящий момент. Однако скоростные характеристики ограничены из-за больших потерь при вращении. Шаговый двигатель типа PM часто используется для простого позиционирования, поскольку его разрешение, как правило, больше, чем у других типов (например, 3,6° или больше).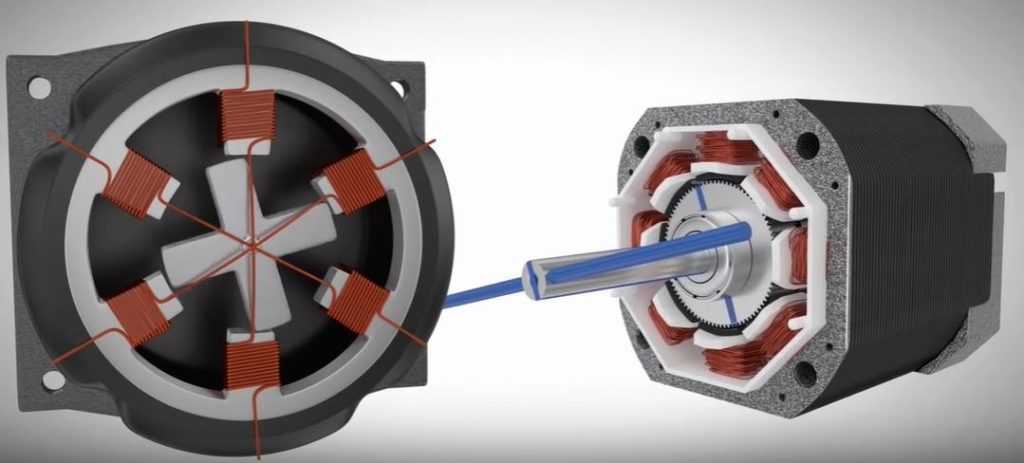 Для более высокого разрешения рекомендуется использовать полушаг или микрошаг. С микрошагом способность драйвера точно контролировать ток в каждой фазе становится все более важной для определения повторяющейся точности положения двигателя. Еще одно отличие состоит в том, что в шаговых двигателях с постоянными магнитами используются драйверы постоянного напряжения, которые сложнее использовать, чем драйверы прерывателя постоянного тока.
Для более высокого разрешения рекомендуется использовать полушаг или микрошаг. С микрошагом способность драйвера точно контролировать ток в каждой фазе становится все более важной для определения повторяющейся точности положения двигателя. Еще одно отличие состоит в том, что в шаговых двигателях с постоянными магнитами используются драйверы постоянного напряжения, которые сложнее использовать, чем драйверы прерывателя постоянного тока.
VR «Переменное магнитное сопротивление» Тип
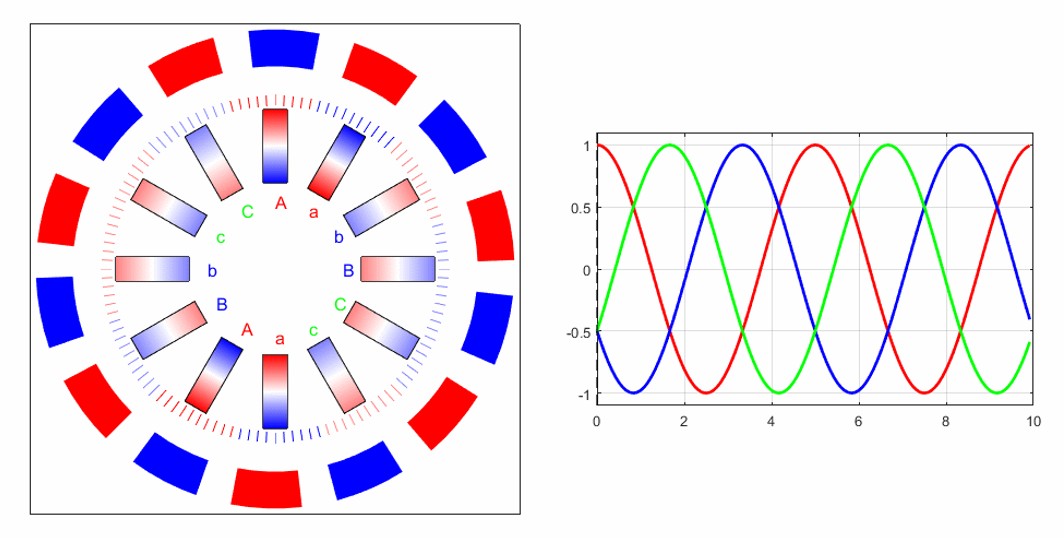
Это шаговый двигатель с зубьями на роторе и статоре, где сосредоточены магнитные силы. Он предлагает самый простой дизайн из трех типов, обсуждаемых здесь. На изображении ниже показан трехфазный шаговый двигатель типа VR с 8 полюсами и 12 слотами. Ферромагнитный материал, такой как железо, используется для большинства магнитных сердечников из-за его распространенности на Земле и его способности легко пропускать магнитный поток. Шаговый двигатель типа VR не имеет магнитов, что означает, что он не может выдавать удерживающий момент или фиксирующий момент в состоянии покоя.
На приведенном ниже рисунке показан пример 4-полюсного шагового двигателя типа VR с 6 слотами. «Зубцы» ротора притягиваются к намагниченным полюсам статора. Полюса статора на каждой стороне ротора намагничены с севера и юга путем намотки полюсов в обратном порядке.
На изображениях ниже слева показано состояние «Фаза B возбуждено». В этом состоянии ближайшие зубья от ротора выровняются с ближайшим магнитным полюсом на статоре. Ротор будет вращаться против часовой стрелки на 30°, пока зубья не выровняются друг относительно друга (см. «Положение остановки фазы B»). Теперь, когда фаза C возбуждена таким же образом, ротор повернется на 60°, пока зубья не выровняются с фазой C.
| Возбуждение фазы B | Положение остановки фазы B | Стоп Положение фазы C |
Преимущество шагового двигателя типа ВР заключается в том, что нет необходимости изменять полярность полюсов статора, что позволяет упростить схему его привода. Его недостатком является невозможность точного управления крутящим моментом, поскольку крутящий момент пропорционален квадрату тока, а не току. Однако, поскольку в нем не используются постоянные магниты, его высокоскоростные характеристики лучше, чем у шагового двигателя с постоянными магнитами.
Его недостатком является невозможность точного управления крутящим моментом, поскольку крутящий момент пропорционален квадрату тока, а не току. Однако, поскольку в нем не используются постоянные магниты, его высокоскоростные характеристики лучше, чем у шагового двигателя с постоянными магнитами.
Угол шага шагового двигателя типа VR представлен следующей формулой. Np — количество зубьев ротора, а Nphase — количество фаз. Для более точных разрешений эффективно увеличить количество зубьев ротора. Однако, если количество пазов статора также увеличивается, конструкция становится очень сложной в изготовлении. На изображении ниже показана конструкция ротора и статора с 50 зубьями. Это 4-фазный шаговый двигатель, в котором обмотка разделена на 4 группы. Если ввести Np = 50 и Nphase = 4, угол шага составит 1,8°.
Шаговые двигатели типа VR используются уже давно. Эти двигатели имеют меньшее падение крутящего момента при более высоких скоростях двигателя, поэтому они часто являются лучшим выбором, чем шаговые двигатели с постоянными магнитами, для приложений со средней и высокой скоростью.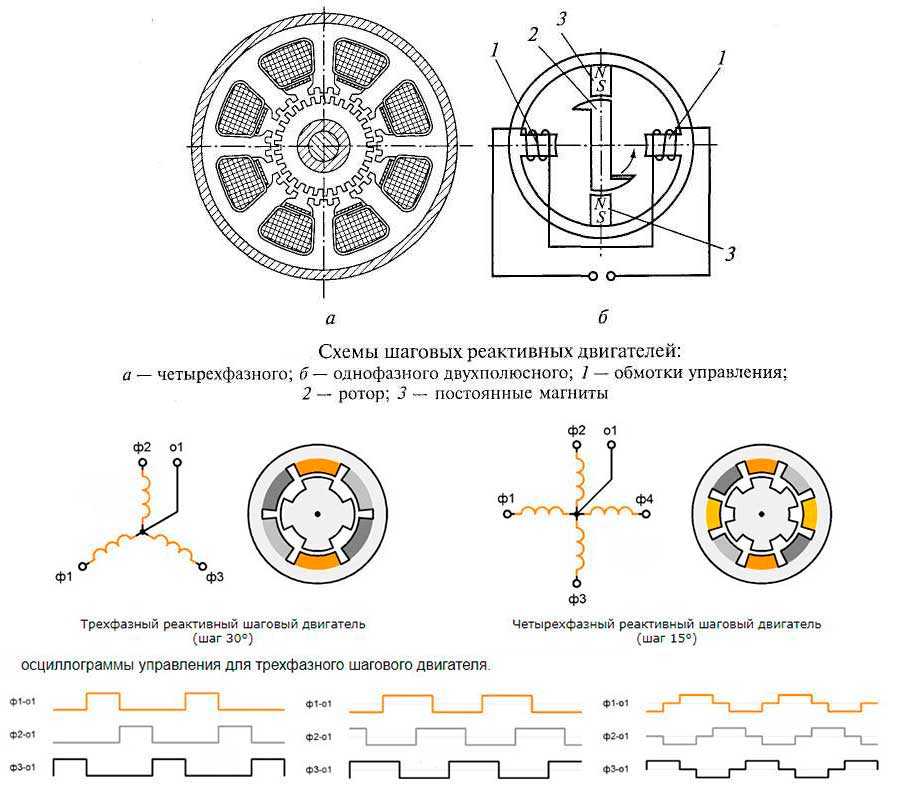 Однако известно, что они производят больше шума, поэтому область их применения ограничена. Шаговые двигатели типа VR менее распространены на рынке, чем шаговые двигатели типа PM.
Однако известно, что они производят больше шума, поэтому область их применения ограничена. Шаговые двигатели типа VR менее распространены на рынке, чем шаговые двигатели типа PM.
Шаговый двигатель гибридного типа
Шаговый двигатель «гибридного» типа сочетает в себе конструкцию и преимущества шаговых двигателей с постоянным магнитом и переменного сопротивления. Поэтому в конструкции шагового двигателя гибридного типа используется как ротор с постоянными магнитами, так и зубчатый ротор и статор. С сильными постоянными магнитами, зубчатым ротором, зубчатым статором и крошечным воздушным зазором шаговый двигатель гибридного типа способен фокусировать магнитный поток лучше, чем два других типа. Низкие потери достигаются за счет укладки пластин из магнитной стали, которые легко пропускают магнитный поток.
Конструкция шагового двигателя гибридного типа начинается с двух чашек ротора (ротора 1 и ротора 2) и сильного постоянного магнита из редкоземельных металлов, намагниченного в осевом направлении.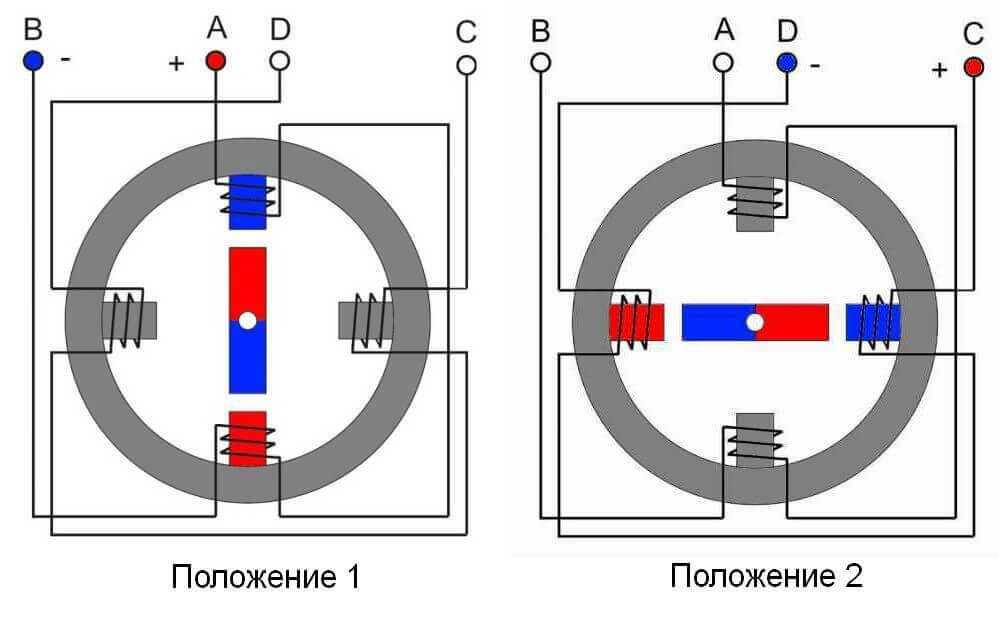 Два шарикоподшипника крепят ротор к корпусу двигателя. На роторах имеется либо 50 зубьев (1,8° на шаг), либо 100 зубьев (0,9° на шаг). Один ротор намагничен как северный полюс, а другой ротор намагничен как южный полюс. Каждый зубец на чашках ротора становится магнитным полюсом.
Два шарикоподшипника крепят ротор к корпусу двигателя. На роторах имеется либо 50 зубьев (1,8° на шаг), либо 100 зубьев (0,9° на шаг). Один ротор намагничен как северный полюс, а другой ротор намагничен как южный полюс. Каждый зубец на чашках ротора становится магнитным полюсом.
На двух изображениях ниже мы показываем два ротора, вид сверху вниз; начиная с северного полюса ротора сверху. Две чашки ротора разного цвета. Красный — это ротор северного полюса, а синий — ротор южного полюса.
Поскольку имеется 50 зубцов, полный шаг составляет 7,2°. Две чашки ротора смещены на половину шага (3,6°), поэтому зубья южного полюса ротора 1 выровнены между зубьями северного полюса ротора 2. На виде поперечного сечения ротора вы можете ясно видеть, что Зубья северного и южного полюсов чередуются из-за смещения двух чашек ротора. Когда обмотки запитываются или возбуждаются драйвером, полюса статора превращаются в электромагниты, а ротор с постоянными магнитами следует за ними как притягивающим, так и толкающим эффектом и останавливается с фиксированными шагами. Северные полюса статора будут притягивать южные полюса ротора, и наоборот.
Северные полюса статора будут притягивать южные полюса ротора, и наоборот.
Статор имеет восемь полюсов статора. Когда обмотки наматываются на основные полюса и подается ток, каждый полюс намагничивается к северному полюсу или южному полюсу. Направление тока может определить магнитную полярность. При возбуждении два полюса на противоположных сторонах имеют одинаковую полярность, а два полюса, расположенные под углом 90° к этим полюсам, имеют противоположную полярность. Основные полюса, возбуждаемые вместе, называются «фазами» и могут быть разделены на две фазы (фазу А и фазу В). Вот почему он называется «двухфазным» шаговым двигателем.
Угол шага шагового двигателя гибридного типа обратно пропорционален количеству малых зубцов на роторе ZR и числу фаз n. Знаменатель 2 указывает, что основные полюса статора могут быть настроены на два состояния: северный полюс и южный полюс. Это фундаментальное конструктивное различие между шаговыми двигателями типа VR и гибридного типа.
| Смещение зубьев | Фаза А Возбуждена | Фаза B Возбуждена |
Причина, по которой шаговые двигатели гибридного типа вращаются на 1,8° за шаг, заключается в том, что двигатель перемещается только на четверть шага зубьев за шаг из-за геометрической конструкции между ротором и статором. Когда фаза A возбуждается, когда южный полюс и ее зубья статора прямо выровнены с зубьями северного полюса от ротора, зубцы статора фазы B фактически смещены от зубцов ротора на 1,8 °. Это называется смещением зубьев и является причиной того, что двухфазный шаговый двигатель гибридного типа вращается на 1,8 ° за шаг.
Для шагового двигателя с шагом 0,9° число обоих зубцов ротора должно быть увеличено до 100. Что-либо большее, чем 100 зубцов, довольно сложно изготовить.
В шаговых двигателях гибридного типа высокий крутящий момент может быть получен за счет постоянных магнитов из редкоземельных элементов, в то время как высокое разрешение, получаемое за счет малых зубцов, сохраняется. Кроме того, соотношение между током и крутящим моментом близко к пропорциональному; что делает его более легким в управлении, чем шаговый двигатель типа VR. Шаговые двигатели гибридного типа также могут достигать более высокого разрешения (например: 0,72° на полный шаг / 500 шагов на оборот). Еще более высокое разрешение может быть достигнуто с помощью микрошага.
Кроме того, соотношение между током и крутящим моментом близко к пропорциональному; что делает его более легким в управлении, чем шаговый двигатель типа VR. Шаговые двигатели гибридного типа также могут достигать более высокого разрешения (например: 0,72° на полный шаг / 500 шагов на оборот). Еще более высокое разрешение может быть достигнуто с помощью микрошага.
Сводка
- PM (постоянный магнит) Тип : используются постоянные магниты, средний крутящий момент, низкая и средняя скорость
- VR (переменное сопротивление) Тип : зубчатый ротор/статор, низкий крутящий момент, средняя и высокая скорость
- Гибридный тип : сочетает в себе постоянные магниты и зубья, хорошее сочетание крутящего момента и скорости
Самыми популярными шаговыми двигателями на рынке являются шаговые двигатели гибридного типа, поскольку они обеспечивают наилучшие характеристики, хотя и стоят дороже. Гибридные шаговые двигатели хорошо подходят для большинства приложений, в то время как шаговые двигатели с постоянным магнитом или переменным сопротивлением ограничены определенными приложениями. Драйверы шаговых двигателей в последние годы становятся все более «умными» благодаря технологическим усовершенствованиям функций, распределенному управлению и простоте программирования. К шаговому двигателю можно добавить редукторы и систему обратной связи с обратной связью, чтобы расширить область его применения. Работа с производителем, который может предоставить все необходимые компоненты и обучение, может облегчить жизнь.
Гибридные шаговые двигатели хорошо подходят для большинства приложений, в то время как шаговые двигатели с постоянным магнитом или переменным сопротивлением ограничены определенными приложениями. Драйверы шаговых двигателей в последние годы становятся все более «умными» благодаря технологическим усовершенствованиям функций, распределенному управлению и простоте программирования. К шаговому двигателю можно добавить редукторы и систему обратной связи с обратной связью, чтобы расширить область его применения. Работа с производителем, который может предоставить все необходимые компоненты и обучение, может облегчить жизнь.
Хотите узнать больше?
Узнайте больше об основах шаговых двигателей из наших технических статей и технических документов.
Встречайте наши гибридные шаговые двигатели с высоким крутящим моментом!
Шаговый двигатель с постоянными магнитами — конструкция и работа импульсы. Шаговое движение может быть угловым или линейным.
 Шаговое движение двигателя соответствует входному импульсу.
Шаговое движение двигателя соответствует входному импульсу.
Управление состоит из двух элементов:
- Количество шаговых импульсов (которое определяет угол поворота).
- Данные о направлении (которые определяют порядок возбуждения фаз).
Когда на двигатель подается несколько сигналов напряжения, вал поворачивается на известный угол. Угол, на который двигатель вращается или перемещается для каждого сигнала, известен как угол шага, выраженный в градусах.
Конструкция:
Статор является многополюсным (имеющим несколько полюсов для разных ступеней). Ротор может быть явнополюсным. Но, как правило, это гладкий цилиндрический тип. Он изготовлен из ферритового материала, который постоянно намагничен. Следовательно, двигатель известен как шаговый двигатель с постоянными магнитами.
Рассмотрим шаговый двигатель с постоянными магнитами со статором, имеющим 4 полюса. Вокруг полюсов намотаны катушки возбуждения. Ротор имеет 2 полюса.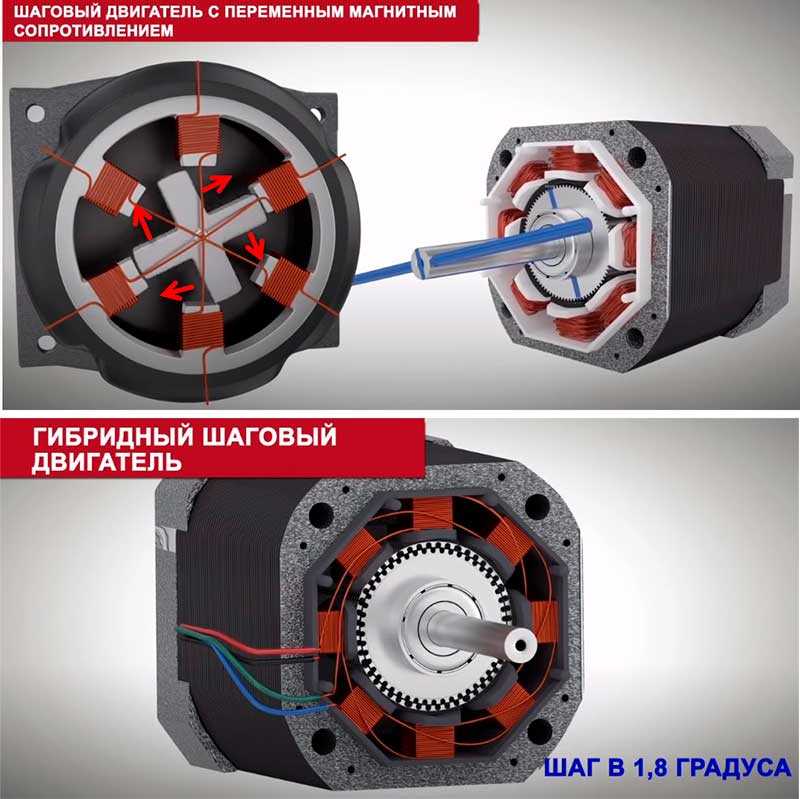
Сигналы напряжения для различных обмоток статора подаются с помощью управляющей цепи (используемой для управления двигателем). Схема привода четырехфазного (четыре обмотки статора) шагового двигателя с постоянными магнитами показана на рисунке ниже.
Операция:
Когда входной импульс подается на двигатель с помощью цепи возбуждения, двигатель начинает вращаться шаговыми движениями.
Корпус — 1
Здесь переключатель SW 1 замкнут, и питание подключено через клеммы A 1 и A 2 благодаря его магнитному полю полюс N установлен на фазе A. Ротор уже состоит из полюсов N и S. За счет развиваемого крутящего момента ротор начинает вращаться, чтобы скорректировать свою ось полюсов, поскольку разноименные полюса притягиваются, а одноименные полюса отталкиваются друг от друга, т. Е. S полюс ротора совмещен с A статора.
Чемодан — 2
Теперь питание отключено от фазы A и подключено через фазу B с помощью SW 2 , т.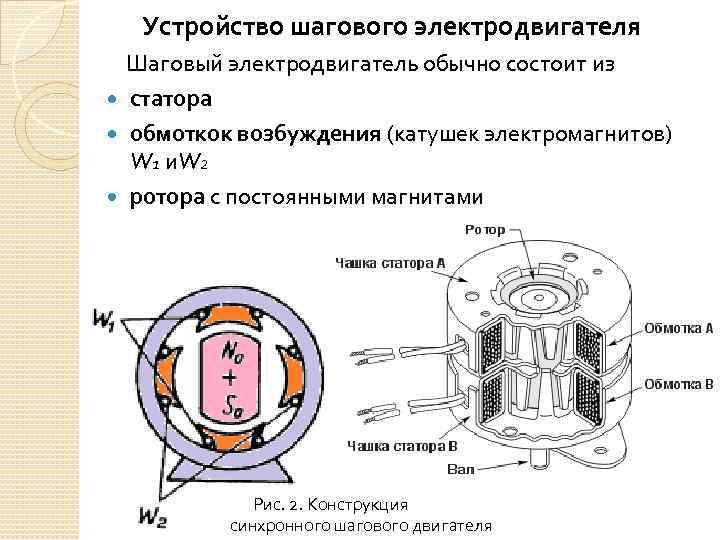 е. к клеммам B 1 и B 2 . Благодаря этому фаза А обесточивается, а фаза В находится под напряжением. Здесь снова устанавливается магнитный полюс N в фазе B. Поэтому ротор далее вращается с углом ступенчатого движения относительно оси полюса фазы B.
е. к клеммам B 1 и B 2 . Благодаря этому фаза А обесточивается, а фаза В находится под напряжением. Здесь снова устанавливается магнитный полюс N в фазе B. Поэтому ротор далее вращается с углом ступенчатого движения относительно оси полюса фазы B.
Аналогично в случаях 3 и 4 при соединении фаз C и D к питанию последовательно. Кроме того, ротор изменяет свое движение под углом в соответствии с соответствующей осью полюса. Мы видим, что движение этого ротора ступенчатое.
Основным ограничением этого типа двигателя является то, что малые ступенчатые движения невозможны, поскольку количество полюсов, которые можно сделать на статоре, ограничено. Это преодолевается за счет использования шагового двигателя с переменным сопротивлением.
Преимущества :
- Его основным преимуществом является наличие стопорного момента. Фиксирующий крутящий момент определяется как максимальный статический крутящий момент, который может быть приложен к валу двигателя без возбуждения, не вызывая непрерывного вращения.

Всего комментариев: 0