4 ось своими руками: самодельная поворотная четвертая ось своими руками
Содержание
Переделка обычного 3-х осевого под 4-ю ось от А до Я — Модернизация
#1
OFFLINE
sp34
Отправлено 20 Февраль 2015 — 15:03
Постараюсь описать в этой теме весь процесс переделки обычного 3-х осевого с параметрами Y-1000 X-750 Z-95 под четвертую ось — своими руками и с минимальными затратами !
Начал я с увеличения высоты портала — моя высота была 95мм
Решил остановиться на высоте 175 мм — это чистая высота от стола до портала + возможность передвинуть шпиндель выше в его хомуте крепления (это чисто для плоскости безопасности ) до 30мм !
Изготовил вот такие проставки (они пронизаны 3-я длинными 100мм болтами на сквозь — закрученные в штатные места + дополнительно короткими для жесткости еще два с верху и два с низу ) на фото видно все и установил их.
Далее проверив работоспособность станка и расстояние от стола до фрезы в крайнем левом положении и крайнем правом — увидел разницу в 0. 45мм (очень много) как избавился , да очень просто — кувалдой как дал по той стороне что была выше и все !!!
45мм (очень много) как избавился , да очень просто — кувалдой как дал по той стороне что была выше и все !!!
А теперь серьезно — взял листовую нержавейку 0.45 мм (ее сейчас валом от 0.4 до 0.8) у жестянщиков — которые вытяжки делают и изготовил из нее пластину в моем случае 150х20 с 3-я отверстиями , установил ее между проставкой и порталом с той стороны которая ниже (на фото я стрелкой показал пластину — там ее еле видно) и о чудо разница в высотах по оси Х стала 0.03 мм — ну на этом я решил успокоиться меня устраивает !
Следующим шагом приобретал токарный шпиндель — немного поискав нашел 130мм (с обратными кулачками как раз зажмет 175мм на нем и остановился )
Прикрепленные изображения
Сообщение отредактировал sp34: 20 Февраль 2015 — 15:07
- Наверх
#2
OFFLINE
sp34
Отправлено 20 Февраль 2015 — 16:18
В этом сообщении о редукторе для токарного шпинделя!
Посмотрев о предложениях уже готовых поворотных осей — все они крепились на стол в рабочую зону тем самым их надо было либо снимать — чтобы рабочее поле было свободным (тем самым нарушая его установку — об этом позже ) либо смириться с потерей части рабочего поля.
Я решил сделать дополнительную площадку для установки 4-оси рядом с рабочей зоной ! решив при этом выше описанные проблемы и получив преимущество такие как : не занимает рабочее поле , не нужно демонтировать и одна из самых главных (при разведении кулачков они могут выходить далеко за пределы диаметра токарного шпинделя и тем самым упереться в стол , а установив площадку чуть ниже рабочего стола — я этого избежал ! )
Ну это я чуть забежал в перед — и перед изготовления площадки нужно найти подходящий редуктор — тут поиск без ограничений !
Я лично придерживался таких параметров как тип редуктора , компактность , передаточное число и диаметр выходного вала для крепления шпинделя !
Самый точный редуктор — это без спорно волновой , но есть варианты и червячных не плохие !
Соотношение редукции выбирал следующим образом — так как на моем станки стоят ШВП с шагом 05 (это своего рода и есть редуктор — за один оборот вала ШД — ось перемещается на 5мм) — отсюда я и оттолкнулся взяв максимальный диаметр обработки 170мм находим длину круга по формуле L = D * 3. 14 получаем L = 549.5мм делим ее на наш шаг 5мм и получаем соотношение (редукцию) 110 — что это — это если бы редуктор вращать ШД любой из нашей оси то за один оборот ШД на поверхности заготовки в диаметре 175мм будет пройден отрезок в 5мм — получаются точно тикие-же параметры как и у нашего станка , НО !!! есть и второй вариант событий !
14 получаем L = 549.5мм делим ее на наш шаг 5мм и получаем соотношение (редукцию) 110 — что это — это если бы редуктор вращать ШД любой из нашей оси то за один оборот ШД на поверхности заготовки в диаметре 175мм будет пройден отрезок в 5мм — получаются точно тикие-же параметры как и у нашего станка , НО !!! есть и второй вариант событий !
Возьмем заготовку ну скажем в 50мм — по выше описанной формуле получаем L = 157мм / 5мм = (редукция) 31 — отсюда видим , что если мы хотим сохранить параметры станка не меняя настройки драйверов и т д на малом диаметре то редукция в 110 нам великовата !
Вывод : если планируете использовать точную обработку (как и на оси Z и Y) на максимальном диаметре то редукция должна быть как в 1 варианте если нет то можно и редукцию чуть меньше !
Лично я остановился на редукторе 1 х 83 так как не планировал ювелирную точность на большом диаметре (но забегая далеко в перед своего описания я решил и эту проблему и теперь я могу поставить любой шаг от 0.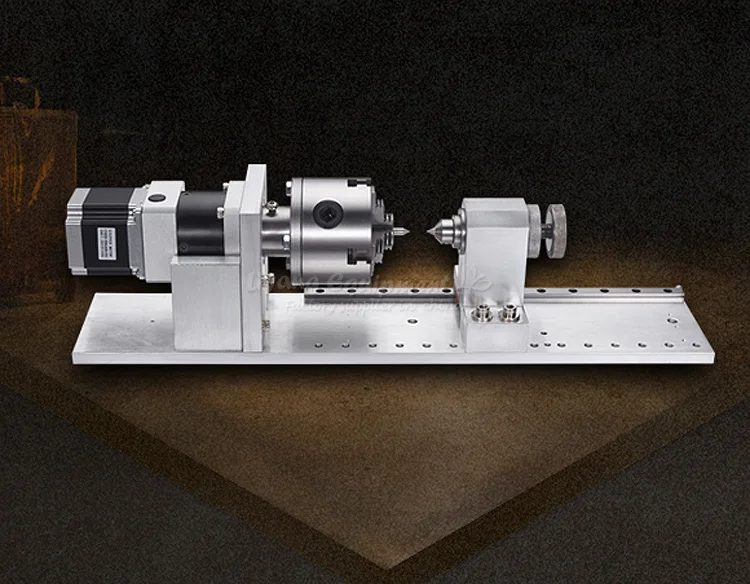 1 до 5.0 на диаметре от 0 до 250мм — но об этом позже !!!)
1 до 5.0 на диаметре от 0 до 250мм — но об этом позже !!!)
Диаметр выходного вала редуктора мне попался 30мм , что так же меня устроило (не сталь обрабатывать) !
Тип редуктора червячный — люфт примерно 1 гр (далее я его исключил до 0.2 — об этом позже)
Вот такой редуктор я выбрал ! Волновой — так за гуманные деньги я и не нашел !
Сообщение отредактировал sp34: 20 Февраль 2015 — 16:23
- Наверх
#3
OFFLINE
sp34
Отправлено 21 Февраль 2015 — 00:32
Извините не успел фотки прикрепить .
Ниже фото где выступающие кулачки для этого я и обнесли стол и второе общее то что получилось + трапеция для жесткости и гашения вибраций !
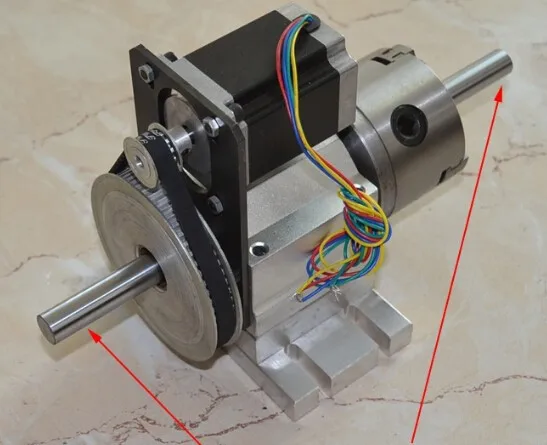
Далее изготавливался переходной фланец с осью — вот такого плана.
Затем переход на ШД чертеж и готовое установленное изделие внутри корпуса переходника применил разъемную муфту из D16 c эластичной вставкой и затем ШД тип nema 23 только усиленный ( LONG) на 28 кг с (подбор вел по току в районе 3-х ампер , силе более 20 кг и самое главное минимальной индуктивности (сопротивления в Ом) — для работы двигателя на повышенных оборотах)
Прикрепленные изображения
Сообщение отредактировал sp34: 21 Февраль 2015 — 01:02
- Наверх
#4
OFFLINE
sp34
Отправлено 21 Февраль 2015 — 02:46
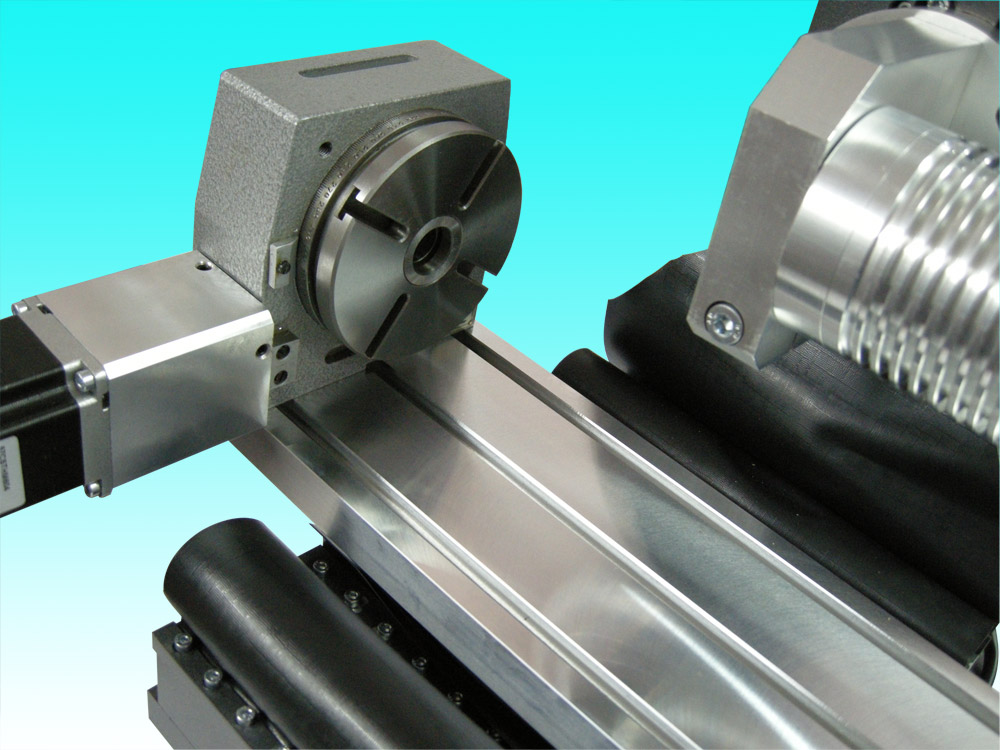
Теперь о подборе задней бабки — много вариантов рассматривал и опять решил сделать сам !
Приобрел вот такой токарный инструмент. — он копеечный !
— он копеечный !
И из переходника конус морзе 2 на конус морзе 3 (ВНИМАНИЕ !!! не на оборот 3-й на 2-й !!!) я изготавливаю подвижную ось для корпуса бабки ! а именно всего навсего протачиваю весь хвостовик конуса морзе 2 диаметром 12мм и по всей его длине нарезаю резьбу М12
Затем сам корпус бабки — номер подшипника там указал он двух рядный ну и куда он там устанавливается я думаю понятно !
Чертеж ручки я удалил к сожалению но приложу сборочный чертеж — там все понятно !
1. красные — это стопорные кольца
2..3..4 — видно и так
Саму раму крепления бабки я изготовил из листовой стали при помощи (листогиба , сварки и болгарки)
она крепиться в пазы рабочего стола и перемещается по всей его длине ! И в нее уже сварил корпус бабки — работа очень точная чтобы попасть ровно в центр токарного патрона !!! (заходя в перед у меня получилась не соосность 0.1мм — я переживу)
Прикрепленные изображения
Сообщение отредактировал sp34: 21 Февраль 2015 — 03:09
- Наверх
#5
OFFLINE
sp34
Отправлено 24 Февраль 2015 — 02:08
Продолжение . …
…
Ниже наглядно показано как обработан конус морзе 2 х 3 — из чего и получен шток бабки.
На втором фото бабка в сборе.
Далее узел зажима штока в бабке на чертежах его нет — там ничего сложного (свершится отверстие 5-6 мм (его видно) и от него распил поперек бабки на 50% всего диаметра и вдоль до начала бабки ) — получается своего рода хомут !
На следующей фотке показана как изготовлена ручка — она произвольная без чертежа (видно стопорное кольцо и т д)
И последнее показан рабочий ход — он примерно 70-80мм я думаю достаточно и отверстия можно посверлить если в бабку сверлильный патрон зажать и уж темболее поджать деталь.
После того как все детали готовы произвел сборку всех узлов !!!
Следующие шаги были по проверки соостности — токарного шпинделя и конуса морзе 3
Проверку провел таким образом — без усилия !!! зажал в токарный патрон 20мм — стержень длинной 900мм предварительно отцентрованный в токарном станке , подвел сверху к стержню фрезер с острой фрезой не касаясь стержня 0.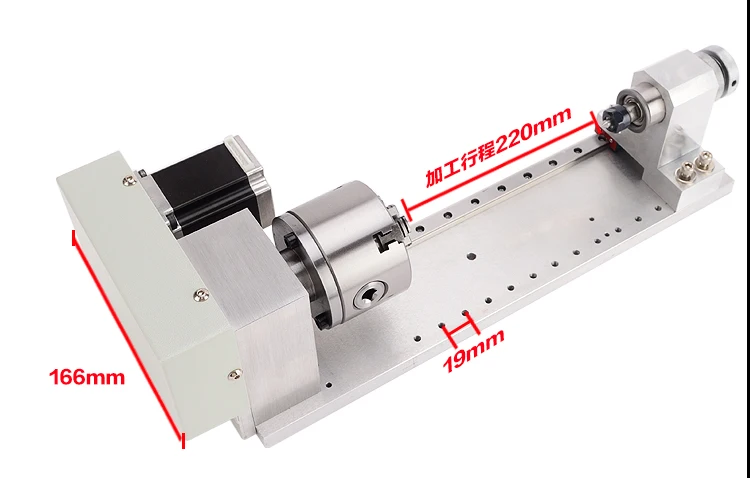 1 — 0.3 мм поработал осью Y по всей длине 900мм — (выявился перекос осей в 1 мм т.е токарный патрон оказался ниже бабки — но не беда (я уже выше описывал данный способ о выравнивании портала) берем 1 мм листовой нерж сталь и изготовил прокладку по всему контору редуктора с токарным шпинделем) — установив ее под редуктор и еще раз проверив все — все несовпадения осей сошли на нет !
1 — 0.3 мм поработал осью Y по всей длине 900мм — (выявился перекос осей в 1 мм т.е токарный патрон оказался ниже бабки — но не беда (я уже выше описывал данный способ о выравнивании портала) берем 1 мм листовой нерж сталь и изготовил прокладку по всему контору редуктора с токарным шпинделем) — установив ее под редуктор и еще раз проверив все — все несовпадения осей сошли на нет !
Вот так , вся механика готова — и следующее сообщения будут про то — как узнать на какие скорости наша механика способна !
Прикрепленные изображения
Сообщение отредактировал sp34: 24 Февраль 2015 — 02:13
- Наверх
Gnuplot 5.0. Spiderplot на 4 оси своими руками / Хабр
При работе над визуализацией данных для статьи возникла необходимость иметь 4 оси с положительными метками на всех.
Как и для других графиков статьи, я решил использовать gnuplot. Первым делом заглянул на официальный сайт, где есть множество примеров. Очень порадовался, когда обнаружил нужный пример (не много поработаю напильником и будет красиво, подумал я).
Быстренько скопировал код, запускаю. Получаю ошибку. Разбираюсь. Оказалось, что у меня старенький gnuplot (Version 5.0 patchlevel 3 last modified 2016-02-21) и он так не умеет.
Зная о гибкости gnuplot, начал шарить просторы всемирной паутины и наткнулся на несколько подходящих примеров на stackoverflow (Double x-axis on a spider plot with Gnuplot и How to Create a Spider Plot in Gnuplot?) и github (gnuplot-radarchart). Они стали отправной точкой.
Далее, мои манипуляции с командами привели к следующему:
0) Отключаем границы
unset border
1) Создаем 4 нулевых линии — 2 основных и 2 дополнительных:
set xzeroaxis set yzeroaxis set x2zeroaxis set y2zeroaxis
Пара слов о нулевых линиях в документации. Данная операция позволяет свести оси в центр рисунка. А дополнительные нужны, чтобы на них отображать положительные тики.
Данная операция позволяет свести оси в центр рисунка. А дополнительные нужны, чтобы на них отображать положительные тики.
2) Настраиваем отображение тиков на осях:
max = 1.5 # Для гибкости min = -max set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35 set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify
С тиками на осях настроек чуть больше. axis — где будут находиться тики, на оси или (border — на границе).
Для оси x, которая уходит вправо 0,.5,max. Первое число — начало отсчета, второе — шаг, третье — конец отсчета. Для первой от 0, а для остальных от 0.5, чтобы нули не мешались в начале координат.
Настройка scale 0. добавляет засечки на ось. Если поиграться с числами, то будет меняться их размер.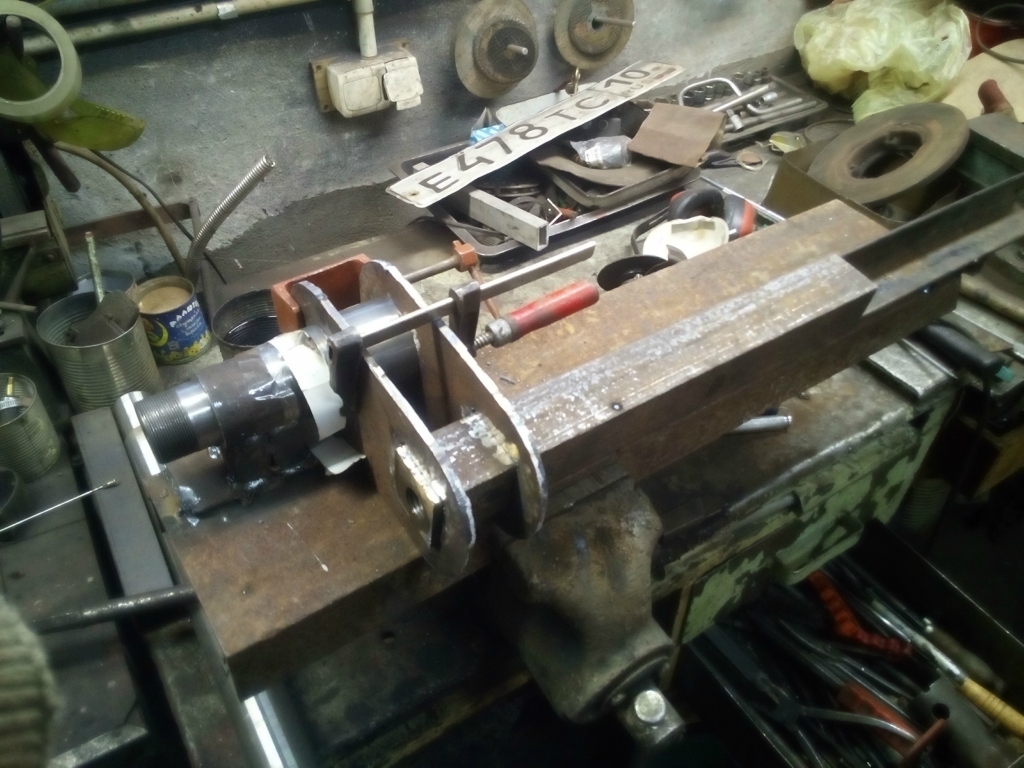 5,0.25 mirror
5,0.25 mirror
Также ввожу переменные max, min, с помощью которых управляю границами осей графика.
Дополнительную информацию по настройке тиков можно найти в документации в разделе Xtics.
3) Настраиваем диапазоны осей:
set xrange [ min : max ] set yrange [ min : max ] set x2range [ max : min ] set y2range [ max : min ]
Здесь следует отметить, что 2 оси начинают отсчет от min на увеличение и 2 оси — с max на уменьшение.
Дополнительная информация в разделе Xrange.
4) Даем осям имена и красиво их размещаем:
set label "H_1" at 0, max center offset char 2, 0 set label "H_2" at max+0.1, 0 center offset char -1, 1 set label "H_3" at 0, min center offset char -2, 0 set label "H_4" at min, 0 center offset char 0, 1
5) Формируем входные данные
На каждый график выделено по 2 столбца.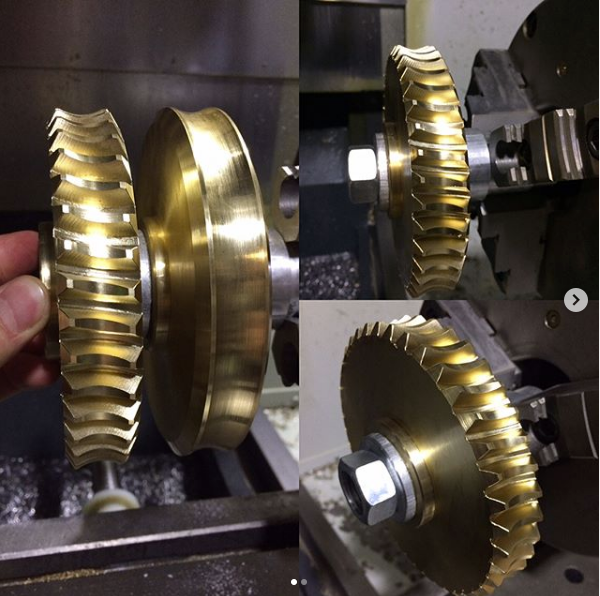 Номер строки — номер оси, пятая строка, чтобы замкнуть контур. Нечетная колонка — координата
Номер строки — номер оси, пятая строка, чтобы замкнуть контур. Нечетная колонка — координата x, четная — y. Ввиду того, что все точки располагаются на осях, то из пары (x, y) одна всегда равна нулю.
Несмотря на то, что все 4 оси положительные, некоторые данные искусственно перемещаются на отрицательную половину, потому что располагаются на основных осях x и y.
0 1 0 1.21 1 0 1.21 0 0 -1 0 -1.06 -1 0 -1.19 0 0 1 0 1.21 #Дубликат первой точки
Результат
Полный код
#!/usr/bin/gnuplot -persist #файл в кодировке cp1251 чтоб русские буквы отображались в eps set encoding cp1251 set terminal postscript eps enhanced monochrome size 5cm,5cm set output "./img/eps/fig2.eps" unset border set key at -2, 1.5 font 'LiberationSerif, 23' set key left top samplen 4.5 set xzeroaxis set yzeroaxis set x2zeroaxis set y2zeroaxis max = 1.5 min = -max set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35 font 'LiberationSerif, 20 set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20 set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20 set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20 set xrange [ min : max ] set yrange [ min : max ] set x2range [ max : min ] set y2range [ max : min ] set label "H_1" at 0, max center offset char 2, 0 font 'LiberationSerif, 23' set label "H_2" at max+0.1, 0 center offset char -1, 1 font 'LiberationSerif, 23' set label "H_3" at 0, min center offset char -2, 0 font 'LiberationSerif, 23' set label "H_4" at min, 0 center offset char 0, 1 font 'LiberationSerif, 23' set style line 1 linetype 1 pointtype 7 linewidth 3 linecolor black set style line 2 linetype 2 pointtype 7 linewidth 3 linecolor black plot 'data.
csv' using 1:2 title "1" w lp ls 1 ,\ 'data.csv' using 3:4 title "2" w lp ls 2
DIY ЧПУ 4-я ось с тормозом
Посмотреть галерею
Команда
(1)
- Фернандо
Присоединяйтесь к команде этого проекта
завершенный проект
аппаратное обеспечение
Этот проект был
создано 04.02.2020
и последний раз обновлялся 3 года назад.
Основой проекта является импортированный из Японии привод подавления гармоник 100:1.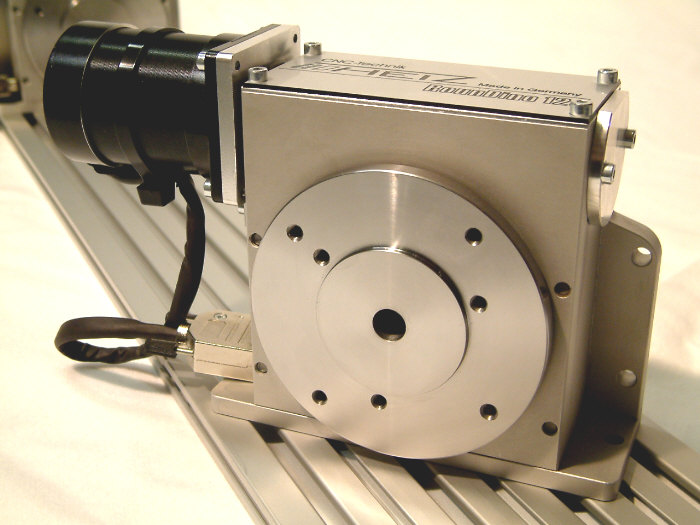 Для компактности я выбрал один из их блоков CSD (CSD-25-100-2A-GR-SP), который имеет общую длину всего 17 мм и внешний диаметр 85 мм. Номинальный крутящий момент для этой модели составляет 47 Нм при 2000 об/мин, с ограничением 110 Нм для повторного крутящего момента.
Для компактности я выбрал один из их блоков CSD (CSD-25-100-2A-GR-SP), который имеет общую длину всего 17 мм и внешний диаметр 85 мм. Номинальный крутящий момент для этой модели составляет 47 Нм при 2000 об/мин, с ограничением 110 Нм для повторного крутящего момента.
Вход гармонического привода управляется шаговым двигателем с обратной связью 4,6 Нм (Nema 34). Выходная сторона прикреплена к валу с наружным диаметром 40 мм, поддерживаемому парой прецизионных конических роликоподшипников P5 (32008 XA P5), при этом узел удерживается внутри стального корпуса кубической формы со стороной 120 мм.
Детали
Интересная часть этого проекта, на мой взгляд, электромагнитный тормоз. Большинство самодельных сборок 4-й оси, которые я нашел в Интернете и основаны на гармонических приводах, не включают тормоз. Это приводит к некоторым проблемам с производительностью, поскольку гармонические приводы заметно не очень жесткие на кручение устройства.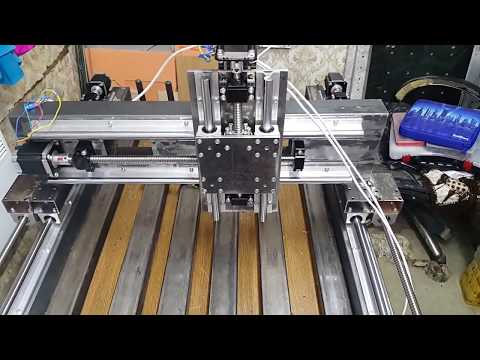 Например, для выбранного мной привода крутящий момент 10 Нм на выходе приводит к крутильному смещению 76 угловых секунд. Это линейное смещение 28 микрон при радиусе 75 мм. Это означает, что мы можем выполнять только очень легкую обработку или очень маленькие детали…
Например, для выбранного мной привода крутящий момент 10 Нм на выходе приводит к крутильному смещению 76 угловых секунд. Это линейное смещение 28 микрон при радиусе 75 мм. Это означает, что мы можем выполнять только очень легкую обработку или очень маленькие детали…
Поскольку я планирую использовать эту 4-ю ось в основном только для индексации, наличие тормоза в основном решает эту проблему жесткости.
Тормоз состоит из алюминиевого диска, прикрепленного к основному валу через осевой изгиб (пришлось перебрать 2 варианта изгиба, пока не нашел подходящую конструкцию). По умолчанию диск прижат стальной пластиной к неподвижному алюминиевому корпусу. Эта пластина предварительно нагружена 8 пакетами тарельчатых (пружинных) шайб, закрепленных на винтах с внутренним шестигранником M5. Преднатяг пружины, определяющий тормозной момент, можно регулировать, затягивая или ослабляя винты M5.
Использование алюминия в качестве тормозных поверхностей может показаться странным выбором, но эта комбинация материалов на самом деле имеет довольно высокий статический коэффициент трения (около 1,0, в зависимости от источника данных). Поскольку цель этого «тормоза» состоит в том, чтобы зафиксировать 2 поверхности вместе, а не на самом деле ломать (то есть, поверхности скользят вместе), я не ожидаю слишком много проблем с износом или истиранием алюминиевых поверхностей. Но я могу ошибаться, и если я новый диск и корпус можно легко сделать из разных материалов.
Поскольку цель этого «тормоза» состоит в том, чтобы зафиксировать 2 поверхности вместе, а не на самом деле ломать (то есть, поверхности скользят вместе), я не ожидаю слишком много проблем с износом или истиранием алюминиевых поверхностей. Но я могу ошибаться, и если я новый диск и корпус можно легко сделать из разных материалов.
Когда дело доходит до приведения в действие тормозов, существует множество доступных способов (гидравлический, пневматический, гидравлический вместо пневматического и т. д.). Я выбрал электромагнитный привод, так как его было довольно легко аккуратно интегрировать в 4-ю ось и просто подключить к обрабатывающему центру, в который он войдет.
Привод состоит из 700-витковой катушки из эмалированной медной проволоки диаметром 0,65 мм, вставленной в переднюю часть стального подшипникового узла. В состоянии покоя зазор между стальной пластиной, которая предварительно нагружает тормоз, и стальным подшипниковым блоком составляет 0,2 мм. Когда на катушку подается ток 2,4 А, магнитные силы оттягивают стальную пластину от алюминиевого диска, тем самым отпуская тормоз. Как только стальная пластина приклеится к стальному подшипниковому блоку, ток можно уменьшить вдвое (около 1,2 А), чтобы не перегреть и не сжечь катушку. На практике это достигается включением резистора последовательно с катушкой через реле задержки.
Как только стальная пластина приклеится к стальному подшипниковому блоку, ток можно уменьшить вдвое (около 1,2 А), чтобы не перегреть и не сжечь катушку. На практике это достигается включением резистора последовательно с катушкой через реле задержки.
Измеренный удерживающий момент для оптимального предварительного натяга составил около 90 Нм, что кажется разумным для 4-й оси такого размера, которая будет использоваться в основном для обработки алюминиевых деталей. Измеренный люфт (который возникает как из-за гистерезисных потерь внутри гармонического привода, так и из-за дискретных шагов шагового двигателя) составил около 18 угловых секунд без нагрузки.
Я надеюсь, что это может быть полезно/вдохновить всех, кто думает о создании 4-й оси своими руками.
IMG_7.jpgТормозная катушка и стальной корпус подшипника Изображение в формате JPEG — | Предварительный просмотр | Скачать |
IMG_6.jpgКонтргайка предварительного натяга главного вала и подшипника Изображение в формате JPEG — | Предварительный просмотр | Скачать |
IMG_26.jpgТормозной узел Изображение в формате JPEG — | Предварительный просмотр | Скачать |
IMG_14.jpgОбработка тормозного диска (версия 2.0) Изображение в формате JPEG — | Предварительный просмотр | Скачать |
IMG_13.jpgПодшипники с предварительным натягом Изображение в формате JPEG — | Предварительный просмотр | Скачать |
 02.2020 в 12:01
02.2020 в 12:01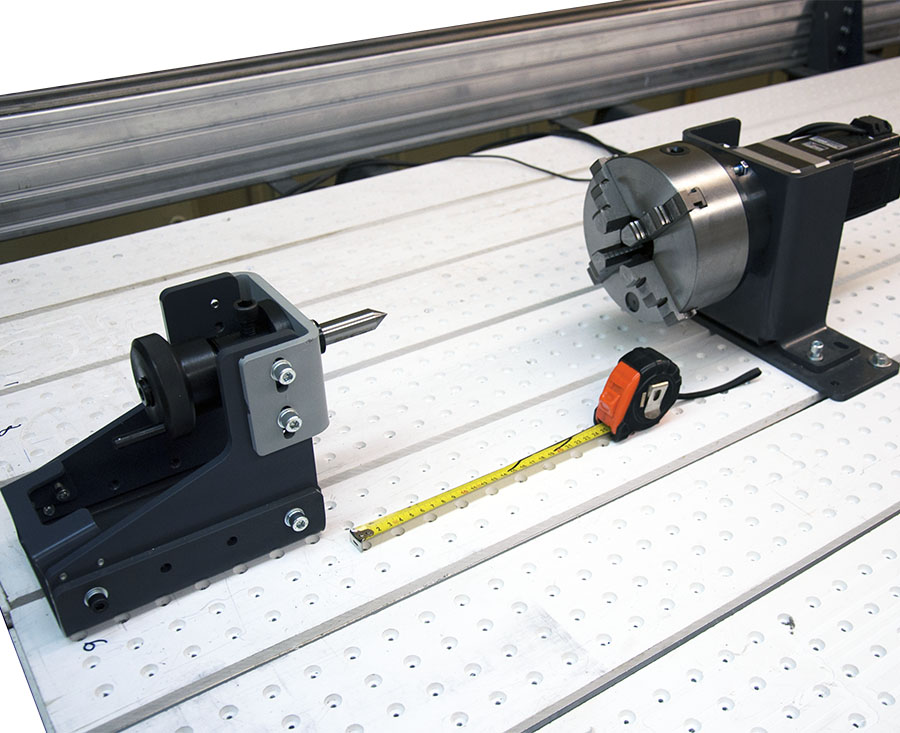 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01Просмотреть все 22 файла
Нравится этот проект?
Делиться
HobbyCNC 3- и 4-осевой драйвер шагового двигателя для DIY ЧПУ
HobbyCNC 3- и 4-осевой драйвер шагового двигателя.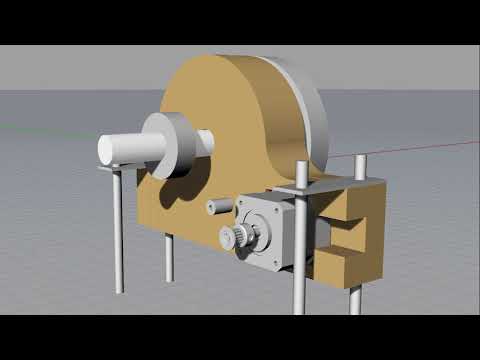
Компактный, мощный, простой в сборке.
Для фрезерного, фрезерного, токарного станка или робота с ЧПУ своими руками!
Только высококачественные компоненты от основных производителей
Минимальный счет и собирайте его сами
Легкие для следования пошаговых направлений
Drive 3 или 4 steppers. до 3 ампер каждый
С 1999 года HobbyCNC продает различные высококачественные изделия с ЧПУ для хобби: комплекты контроллеров шаговых двигателей, чертежи фрезерных станков с ЧПУ и шаговые двигатели для настольных машинистов и любителей.
Наборы драйверов шаговых двигателей HobbyCNC
PRO 3 Axis Kit
Модернизируемый
$ 79
- 3 Axis
- Модернизируемый до 4 TH AXIS
- 42 DCV MAX вход
- 6,8 ″ x 3,7 ″ (173 x 94 мм)
- Current Current Current
- 3.0. 5-, 6- или 8-проводные степперы (4-проводные не используются)
- Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
- Соединения исходного/предельного выключателя
- Радиатор
Узнать больше
Комплект PRO 4 Axis
Полностью загружен
$ 105
- 4 Axis
- Обновляется до 4 TH AXIS
- 42 DCV MAX вход
- 6,8 ″ x 3,7 ″ (173 x 94 мм)
- Идентификационный ток.
- 5-, 6- или 8-проводные степперы (4-проводные не используются)
- Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
- Соединения исходного/конечного выключателя
- Радиатор
Узнать больше
PRO 4 оси
Собрано и протестировано
$ 174
- 4 Axis
- Обновление до 4 TH AXIS
- 42 DCV MAX вход
- 6,8 ″ x 3,7 ″ (173 x 94 мм)
- Cuccure Current
- 3.0.0.0.0
- 5-, 6- или 8-проводные степперы (4-проводные не используются)
- Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
- Соединения исходного/конечного выключателя
- Радиатор
Узнать больше
Комплект защиты Arduino
Arduino Uno/GRBL для PRO
24,95 $
- Плата Arduino® UNO для подключения к HobbyCNC PRO
- Оптоизолированные входы. Предел X, Y и Z и датчик.
- Внешний источник питания 6 В пост. тока (в комплекте)
- Выход на дополнительную релейную плату.

Всего комментариев: 0