Модули по робототехнике: Купить модули для роботов и робототехники по низкой цене в интернет-магазине Human and Gears с быстрой доставкой
Содержание
Робототехника. Модуль 3
В этом модуле вы узнаете:
• какие специалисты точно нужны для создания роботов и как с ними работать;
• как выбирают, из чего сделать робота;
• почему без математики робот не сможет перемещаться;
• кто учит роботов «ходить» и «видеть».
Оглавление
Команда робототехников: основные участники
В первом модуле курса мы говорили о том, что робота вполне можно сделать самостоятельно, были бы подручные материалы и толика вдохновения. В разработке промышленных, военных и других сложных роботов этого недостаточно, здесь нужны квалифицированные инженеры разной специализации.
Конкретный состав команды зависит от задачи. В несложных проектах какой-то специалист может и не потребоваться; бывает и так, что один инженер выполняет две-три роли. Когда же речь идет о строительстве марсохода, команда нужна большая, и специалистов одного профиля может быть несколько.
В этом модуле мы поговорим о том, какие специалисты нужны в команде, которая строит современного гибридного робота.
Инженер-мехатроник
Инженер-математик
Инженер-программист
Инженер-электроник
Теперь расскажем подробнее о каждом из этих инженеров.
Инженеры-математики
Робот воспринимает мир не так, как мы: у него нет органов чувств, он вынужден полагаться на цифры. Данные с датчиков — это числа. Алгоритмы, которые управляют его поведением в зависимости от полученной информации, тоже оперируют числами. Благодаря этим числам робот может перемещаться, распознавать объекты и голоса, манипулировать предметами. Словом, без математики в робототехнике не обойтись.
Робот-пылесос, марсоход Curiosity и футуристичные микродроны, опыляющие растения вместо пчел, — всем им приходится исследовать новое пространство, будь то квартира, поля вокруг фермы или кратер чужой планеты. Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения.
Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения.
Ведь что знает о вашей комнате робот-пылесос, который вы только что достали из коробки, зарядили и торжественно выпустили в мир, полный пыли, крошек, кошачьей шерсти и разнообразных опасностей — от ножки стола до озадаченных домашних животных? Почти ничего, кроме, может быть, данных о некотором ближайшем окружении. Здесь на помощь приходит математика, а точнее — графы. Не пугайтесь, вы уже видели их на схеме линий метро. Граф — это набор соединенных точек: благодаря линиям мы можем найти оптимальный путь между точками. С помощью графов навигатор в вашей машине умеет строить кратчайший маршрут.
Робот-пылесос, ловко уворачиваясь от кошки и ножек стола, тоже записывает данные о местности в виде графа: отдельные объекты становятся точками — вершинами графа, а переходы от одной точки к другой — ребрами. При этом ребро можно построить только тогда, когда переход из одной вершины в другую совершен (до этого момента робот «не знает» о существовании ребра). Так он и ползает деловито по ребрам между вершинами, пока не приберет всю квартиру. Информация о пройденных ребрах и вершинах остается в памяти, так что по второму кругу на одном месте убирать он не будет.
Так он и ползает деловито по ребрам между вершинами, пока не приберет всю квартиру. Информация о пройденных ребрах и вершинах остается в памяти, так что по второму кругу на одном месте убирать он не будет.
Инженеры-программисты
Когда мы определили, как робот будет двигаться и по какой формуле станет обрабатывать полученные данные, приходит время научить его, как следует вести себя в разных ситуациях. Инженеры-программисты помогут роботам выбрать план действий в зависимости от показаний датчиков.
Программы нужны, чтобы…
Помочь роботу вовремя снять показания с датчиков. Задача программы — дать роботу порядок действий: вот так получаешь информацию из внешнего мира, вот так с ней поступаешь. Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения.
Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения.
Помочь роботу принять верное решение на основе данных датчиков. Получив данные, программа соотносит их с некоторым эталонным значением. Допустим, программа дает сигнал промышленному манипулятору переместить предмет. Датчики манипулятора сообщают программе, как он расположен в пространстве, открыт или закрыт захватный механизм, есть ли в нем груз. Сравнивая показания датчиков с эталонными для текущей ситуации значениями, программа корректирует его действия. Эталонной величиной может быть, например, градус наклона манипулятора. Если робот действует в зависимости от температуры, это и будет его эталонной величиной. Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость.
Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость.
Помочь роботу «видеть» и распознавать объекты. Вы уже знаете, как графы помогают роботам двигаться. Теперь давайте посмотрим, как они помогают «видеть». Любым роботам, которые манипулируют объектами, необходимо уметь различать их между собой. Камеры и алгоритмы распознавания позволяют фактически научить робота «видеть» окружающий мир.
Одна из задач в процессе распознавания образов — выделение контуров объектов. Тут графы и приходят на помощь. Например, они помогают выделить подконтуры. Компьютер не видит, как человек, весь объект целиком, а может только распознать отдельные части, сопоставить с другими изображениями и достроить целое. Подконтуры, то есть контуры частей, помогают собрать объект воедино, составить общую картинку.
Те же графы позволяют построить модель поверхности объекта: горизонтальная, вертикальная, с изгибом, здесь выпуклая, тут вдавленная. Сличая разные поверхности из своей базы, робот «понимает» форму объекта. Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось).
Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось).
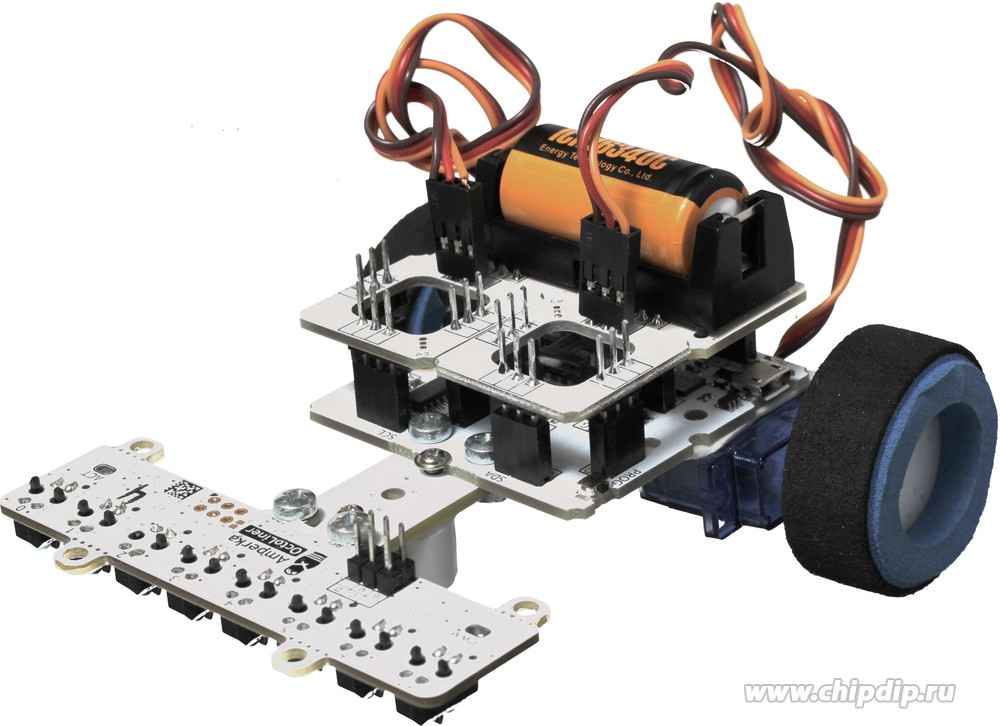
Инженеры-электроники
Без правильной настройки электронных схем и компонентов роботы не будут функционировать. Построить робота самостоятельно, ничего не зная о его электронной части, невозможно. В дело вступают инженеры-электроники.
Сегодня больше всего распространены гибридные роботы. Они состоят из двух и более систем с разными принципами работы. Почти всегда в них есть электроника: платы, провода, микросхемы. Значит, в команду разработчиков робота нужен инженер-электроник.
Задача электротехники — соотнести требования программного обеспечения с реальностью.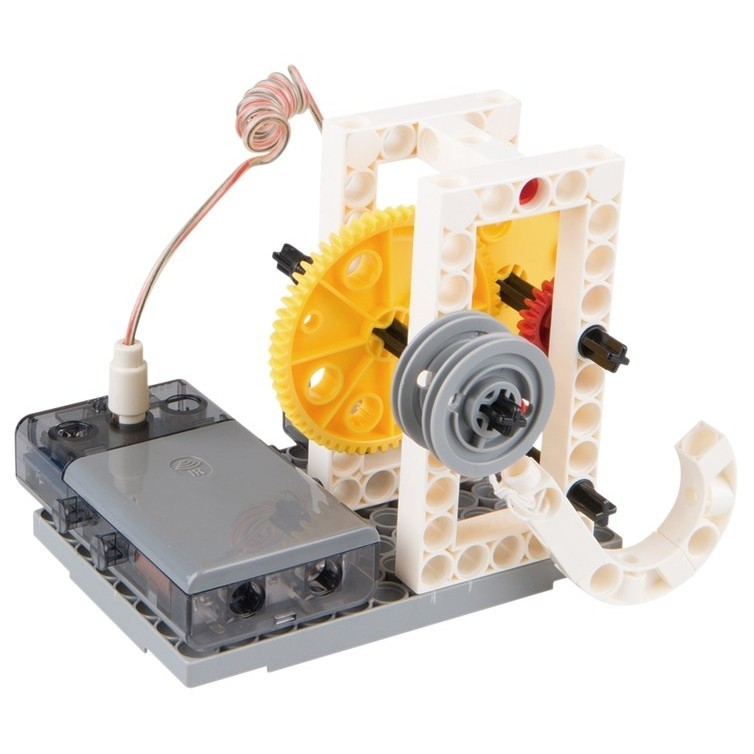 Важно правильно подобрать комплектующие и тщательно их настроить.
Важно правильно подобрать комплектующие и тщательно их настроить.
Это особенно критично, когда все компоненты робота создаются с нуля. Готовые модули построены и проверены производителем, их параметры продуманы заранее. Однако для некоторых специфических задач они не подходят, и тогда приходится разрабатывать составляющие самостоятельно.
Давайте разберем на конкретном примере, что именно делает электроник для робота и от каких проблем он может спасти.
1. Блок питания
Блок питания дает роботу энергию для работы. Если включить все приводы одновременно, блок питания может не справиться с нагрузкой и перегореть. Именно электроник посчитает суммарную потребляемую мощность всех приводов и их схемы управления и спроектирует блок питания с запасом по мощности.
2. Силовые провода — провода, по которым идет высокий ток
Силовые провода могут быть разной толщины (электроники говорят «сечения»). Чем выше ток, который идет по проводу, тем толще провод должен быть. В противном случае есть опасность, что провод будет перегружен, нагреется или даже загорится. Грамотный электроник подберет провода нужного сечения в зависимости от силы тока, который по ним пойдет.
В противном случае есть опасность, что провод будет перегружен, нагреется или даже загорится. Грамотный электроник подберет провода нужного сечения в зависимости от силы тока, который по ним пойдет.
3. Силовая цепь — участок электронной платы, отвечающий за передачу энергии
Силовая цепь получает напряжение от блока питания и распределяет его по всей плате, тем самым запуская работу всех систем. Если неправильно учесть силу тока, протекающего в силовой цепи, плата нагревается. В лучшем случае робот перестанет работать, в худшем — загорятся отдельные компоненты. Электроник необходим, чтобы учесть силу тока при выборе платы и проводников.
4. Условия работы
Иногда получается так, что условия реальной работы не совпадают с теми, для которых проектировали устройство. Это может вызвать явные проблемы — отдельные компоненты выходят из строя, какие-то системы или все устройство перестает работать. Могут возникать и малозаметные проблемы — из-за реакции компонентов на температуру манипулятор перемещается на неверное расстояние. Электроник учтет будущие условия работы при проектировании, а при необходимости — предусмотрит охлаждение элементов или внутреннюю вентиляцию.
Электроник учтет будущие условия работы при проектировании, а при необходимости — предусмотрит охлаждение элементов или внутреннюю вентиляцию.
Вот еще несколько задач, которые помогают решить электроники:
подобрать величину напряжения и тока на выходе устройства управления двигателями робота, чтобы он мог перемещаться на точное расстояние с заданной скоростью;
выбрать датчики исходя из поставленных задач;
подобрать управляющий микроконтроллер, чтобы обработать информацию, приходящую с датчиков;
выбрать требуемые электродвигатели при проектировании робота.
Инженеры-мехатроники
Даже в век точной электроники роботы, не имей они механических частей, оставались бы просто неподвижным набором деталей. Создателям роботов не обойтись без инженера-мехатроника — специалиста по разработке сложных механизмов.
Если неверно спроектировать механические составляющие робота, на исправление проекта и изготовление новых деталей уйдет немало времени и денег. Давайте посмотрим на примере, какие элементы робота — ответственность мехатроника и как он может сделать робота надежнее.
Давайте посмотрим на примере, какие элементы робота — ответственность мехатроника и как он может сделать робота надежнее.
1. Плечо/звено
С точки зрения механики промышленный манипулятор представляет собой систему балок (плеч, звеньев) и шарниров. Чтобы звено было достаточно длинным или выдерживало большие нагрузки, первое, что приходит в голову, это сделать его потолще, но тогда оно станет слишком тяжелым. Мехатроник рассчитает, из какого материала лучше изготовить звено, какого оно должно быть размера и какая конструкция звена подойдет для решения конкретной задачи.
2. Редуктор
Редуктор уменьшает скорость движущихся частей относительно скорости мотора, чтобы повысить силу тяги устройства (так оно поднимет больший вес и выдержит большую нагрузку). Если тип и характеристики редуктора подобраны неверно, он работает под большой нагрузкой. Грамотный мехатроник подберет редуктор так, чтобы он работал с нужной эффективностью, но при этом не на пределе мощности.
3. Шарнир
Шарнир — это «сустав», он соединяет звенья и позволяет им менять свое положение относительно друг друга. Основной критерий эффективности манипулятора — степень его свободы, то есть то, как он перемещается в пространстве. Если манипулятор может перемещаться только вверх-вниз или вращаться вокруг всего одной оси, степень его свободы невелика, поэтому задач он решает немного. Если нужно, чтобы он перемещался в разных плоскостях и вращался вокруг разных осей — это задача мехатроника. Он же сделает так, чтобы на перемещение уходило как можно меньше времени и энергии.
ПЕРЕЙТИ К ЧЕТВЕРТОМУ МОДУЛЮ
Образовательные робототехнические модули
Образовательные робототехнические наборы
Предназначены для образовательных программ, ориентированным на учеников начальной и средней школы и учащихся подготовительных классов — наборы функциональных образовательных робототехнических модулей для освоения и совершенствования навыков взаимодействия с робототехникой от производителей:
- ООО «Экзамен-Технолаб»
- Lego
- Tetrix
- другие.

На кого ориентированы роботехнические наборы
Образовательные робототехнические наборы состоят из нескольких модулей, разработаны на основе продукции лидирующих в области робототехники компаний, подходят для детей от 5 до 14+ лет. Каждый модуль представляет собой уникальную разработку для своей возрастной категории и рекомендован в качестве дополнительного материала для внеклассной работы с учениками, а также для оснащения специализированных учебных лабораторий.
Состав робототехнического модуля*
*может меняться в зависимости от производителя, задач и возраста детей.
-
Программное обеспечение и программируемые механизмы;
-
Набор конструктивных и соединительных элементов;
-
Руководство по сборке для учеников с практическими советами;
-
Руководство по сборке для преподавателей с теоретическим обоснованием;
-
Учебно-методические пособия по проведению занятий;
-
Рабочие тетради для учеников с теоретическим и практическим материалом.
Методические рекомендации для учеников и преподавателей робототехнических наборов производителя Технолаб разработаны при участии специалистов факультета «Робототехника и комплексная автоматизация» МГТУ им Н.Э.Баумана.
Какие задачи решает роботехнический набор для образования
- Формирует практические навыки проектирования объектов различного назначения;
- Развивает вовлеченность и познавательный интерес к робототехнике;
- Способствует овладению навыками программирования простых роботов и роботизированных устройств;
- Помогает освоить междисциплинарные теоретические основы функционирования робототехники.
Блоки роботов Cubelets — Modular Robotics
Строительные блоки для лучших мыслителей.
Что нового.
Знакомство с циклом Cubelets.

Cubelets Cycle — это школьная экскурсия по робототехнике. Просто зарезервируйте, получите и верните.
Почему блоки?
Из блоков можно строить все что угодно. Наш мир состоит из блоков. Деревянные и кирпичные блоки образуют наши дома. Внутри стеклянные блоки, заполненные кодовыми блоками, превращают свет в блоки букв, которые формируют наши перспективы.
А теперь блоки роботов могут помочь вам улучшить мышление.
Опыт, который мы создаем для учащихся, формирует их. Cubelets предназначены для того, чтобы помочь учащимся развивать когнитивные навыки. Таким образом, они могут решать самые большие проблемы и обучать всем стандартам, которые нам нужны.
Познакомьтесь с кубиками.
Кублеты — это блоки роботов, которые помогают обучать важным навыкам решения проблем, таким как совместная работа, проектирование, проектирование и вычислительное мышление.
Воспроизвести видео
Быстрый и простой способ создания роботов.
Кублеты — единственный способ построить робота, состоящего из группы меньших роботов.
Создан, чтобы встретить вас там, где вы находитесь.
Кублеты универсальны. Они используются исследователями Pre-K и докторами наук.
Любим педагогами во всем мире.
Ищите кубики везде, где происходит обучение — в классе, лагере, музее и дома.
Извлекайте самые важные уроки из мелочей.
Кубики используются для обучения навыкам, необходимым для решения самых больших жизненных проблем.
Как строительные блоки, только умнее.
Вы никогда не строили из таких блоков. Кублеты — это единственный способ построить робота, когда вы строите кучу крошечных роботов.
Объединяйте 17 уникальных видов кубиков различными способами, чтобы создавать бесчисленные конструкции роботов. Каждый дизайн — это новая конструкция робота, и все начинается с объединения трех основных категорий кублетов.
Хотите узнать больше?
Узнайте, как работают Cubelets, с помощью Руководства по началу работы. Или ознакомьтесь с некоторыми идеями роботов, чтобы увидеть, что вы можете построить.
Или ознакомьтесь с некоторыми идеями роботов, чтобы увидеть, что вы можете построить.
Подходит… для всех.
Cubelets предназначены для детей от четырех лет и старше. Не позволяйте их возрастному рейтингу обмануть вас! Cubelets легко начать и усложнять по мере того, как вы узнаете больше.
Легко, для начала.
Уникальный дизайн Cubelets упрощает сборку роботов. Их размер и магнитные соединения идеально подходят для пользователей всех уровней квалификации. Нет необходимости кодировать — поведение возникает из вашей конструкции.
Если вы умеете строить из блоков, вы можете строить из кублетов.
Тогда просто комплекс.
Чем больше вы узнаете о Cubelets, тем сложнее они становятся.
С Cubelets всегда есть чему поучиться и открыть для себя. Когда вы будете готовы, бесплатные приложения Cubelets помогут вам изменить поведение любого Cubelet. Безграничные возможности.
Регистратор данных.
Узнайте, как кублеты «разговаривают», визуализируя значения блоков или сохраняя данные для анализа.
Обмен личностью.
Узнайте, как изменение личности кублета меняет его поведение.
Блочное кодирование.
Создавайте новые модели поведения Cubelet с помощью программирования с помощью перетаскивания.
Кодирование С.
Создавайте новые программы Cubelets с помощью текстового кодирования.
Любим педагогами от Вермонта до Вьетнама.
Людей, которые любят Cubelets, можно найти везде, от лагерей до музеев, мастерских, классных комнат и жилых комнат. Кублеты — надежные помощники везде, где происходит обучение.
Cubelets доступны практически каждому и достаточно универсальны, чтобы преподавать больше, чем STEM, что делает их идеальным инструментом для вовлечения каждого учащегося и работы в команде.
Вам не нужно верить нам на слово, узнайте больше от педагогов, которые полагаются на Cubelets в классе.
Влияние Cubelets на моих учеников постоянно превосходит мои ожидания. Мне нужен способ создать равные условия для совместной работы учащихся, расширить концепцию программирования… и вовлечь учащихся, испытывающих затруднения, чтобы сделать обучение увлекательным и увлекательным. Cubelets помогли со всеми этими целями, и я еще даже не начал царапать поверхность.
Протестированные на более чем 150 000 детей в международных и национальных музеях, Cubelets зарекомендовали себя как любимые посетители, которые знакомят посетителей с простой робототехникой и логическим мышлением. Если добавить к этому отличную поддержку клиентов, предоставление образовательных ресурсов, а также хорошую гарантию на продукт, Cubelets стали одной из наших самых популярных установок в digiPlaySpace.
Поддержка входит в стандартную комплектацию.
Cubelets — это больше, чем удивительные роботизированные блоки — это целая система, разработанная, чтобы помочь вам учить и учиться.
Cubelets поддерживаются:
- Бесплатные уроки, соответствующие стандартам
- Бесплатные мероприятия
- Профессиональное развитие
- Надежная гарантия
- Полезные варианты поддержки
9000 Комплект планов уроков Cubelets.
Изучите образовательные ресурсы или ознакомьтесь с контрольным списком администратора, чтобы узнать, как вы освоили Cubelets.
Маленькие роботы, большие уроки.
Кублеты учат всему: от проектного мышления до проектирования, совместной работы, сложности, математики и многого другого. С помощью этих обманчиво простых блоков роботов можно исследовать даже передовые идеи, такие как абстрактное моделирование, системное мышление и эмерджентность. Cubelets помогут вам развить лучших мыслителей.
Pre-K – 2
nd Класс
- Основы робототехники.
- Причина и следствие.
- Крупная моторика.
- Говорить и задавать вопросы.

- Сортировка.
- Последовательность действий.
2
й – 5 й Марка
- Вычислительное мышление.
- Критическое мышление.
- Основы дизайна и инженерии.
- Основы работы в сети.
- Навыки сотрудничества.
- Распознавание образов.
5
-й Класс +
- Основы информатики.
- Кодируй умнее.
- Параллельное программирование.
- Системное мышление.
- Основы сложности.
- Дизайнерское мышление.
- Сети.
- Абстракция.
Принципы лучшего мышления.
Кубики — это конструкторы для формирования нового мышления. Они предназначены для тех, кто непредубежден и хочет освоить навыки, необходимые для решения больших проблем. Объяснить, что все это значит, значит объяснить, для чего на самом деле нужны Cubelets.
Кубики — это строительные блоки, из которых можно улучшить мышление, и их конструкция помогает учащимся практиковать принципы лучшего мышления.
Хотите взять Cubelets на тест-драйв?
Мы знаем, что вам понравятся Cubelets; именно поэтому мы с гордостью предлагаем преподавателям бесплатный набор для обзора. Возьмите Cubelets на 10-дневный тест-драйв.
Вопросы?
Мы здесь, чтобы помочь вам получить максимальную отдачу от Cubelets. Отправьте нам сообщение, чтобы начать разговор!
Напишите нам
Нужен более традиционный робот?
Мы тоже их делаем! Познакомьтесь с GoPiGo, роботом Raspberry Pi, который поможет вам продвинуться дальше в области компьютерных наук.
Исследуйте GoPiGo
Кубики для образования — Модульная робототехника
Магазин Кубики для образования.
Наборы педагога для каждого класса, лагеря и музея.
Специально разработанные наборы для поддержки всего класса учащихся, работающих в небольших группах.
Встроенная скидка для преподавателей.
Цены на пакеты для преподавателей уже включают 20% скидку.
Бесплатные онлайн-планы уроков.
Доступ к более чем 40 часам бесплатных планов уроков Cubelets.
Детали упаковки.
Поддерживает шесть студенческих групп.
Восемь Cubelets на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать базовые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 52 Cubelets.
Включает 24 адаптера для блоков.
В комплекте прочная ванна для хранения.
Включает зарядное устройство для нескольких аккумуляторов.
Детали упаковки.
Поддерживает шесть студенческих групп.
12 кубиков на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать продвинутые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 78 Cubelets.
Включает 12 переходников для кирпичей.
В комплекте прочная ванна для хранения.
Включает зарядное устройство для нескольких аккумуляторов.
Детали упаковки.
Поддерживает до 6–12 студенческих групп.
До 26 Cubelets на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать продвинутые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 156 кубиков.
Включает 48 адаптеров для блоков.
В комплекте две прочные емкости для хранения.
Включает в себя два зарядных устройства для нескольких аккумуляторов.
Из-за высокого спроса и нехватки запчастей некоторые позиции временно отсутствуют на складе.
Если вы хотите разместить заказ на покупку, свяжитесь с нами напрямую, чтобы попасть в список ожидания! Если вам нужно что-то быстро, некоторые предметы доступны для заимствования в рамках программы Cubelets Cycle.
Свяжитесь с нами
Предпочитаете брать взаймы, а не покупать?
Попробуйте Cubelets Cycle!
Узнайте больше о Cubelets Cycle, новом простом способе заимствования и обучения с помощью блоков роботов Cubelets.
При заказе от $50 доставка по США бесплатная.
Применяется только к внутренним заказам в США.
Полная годовая гарантия.
Кубики крепкие. Но на всякий случай, если вам это нужно, мы здесь.
Преподавательские наборы для учебных станций и индивидуальных ресурсов.
Детали набора.
Пять кубиков в наборе.
Позволяет создавать базовые роботы.
Изучите принципы кодирования и вычислительное мышление.
Включает в себя одну шляпу Bluetooth.
Включает в себя два адаптера Brick.
Детали набора.
10 кубиков в наборе.
Позволяет создавать продвинутые роботы.
Изучите принципы кодирования и вычислительное мышление.
Всего комментариев: 0