Моторы для ардуино: Arduino и двигатели||Arduino-diy.com
Содержание
Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения. Это заставляет электромагнит вращаться, возникает движение.
Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц.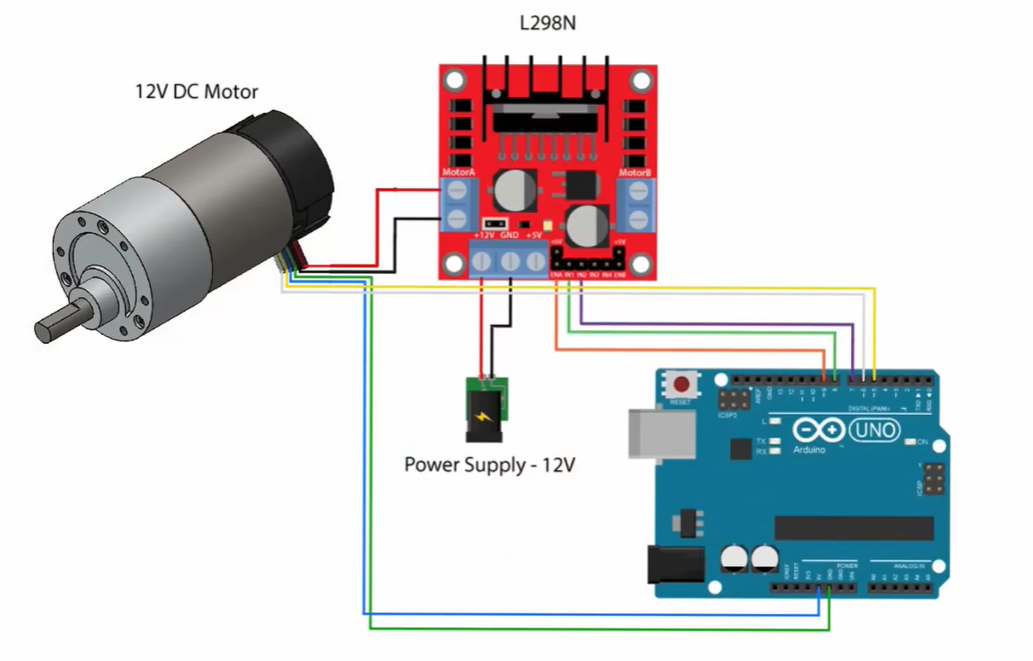 Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока. Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны.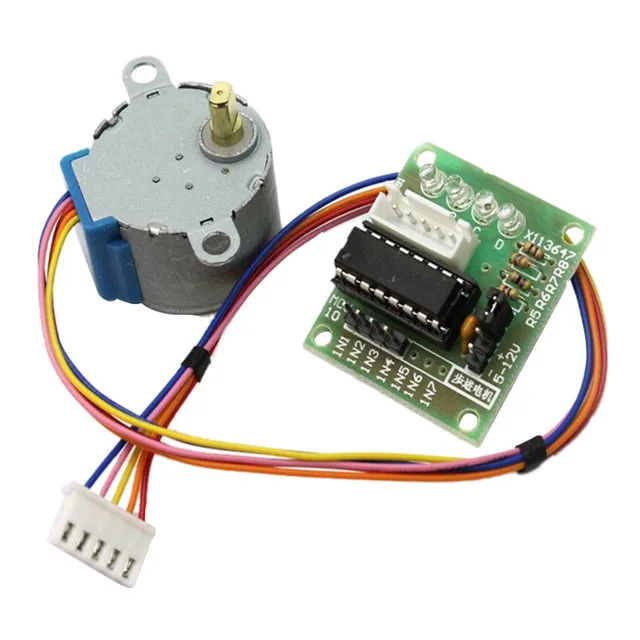 Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino.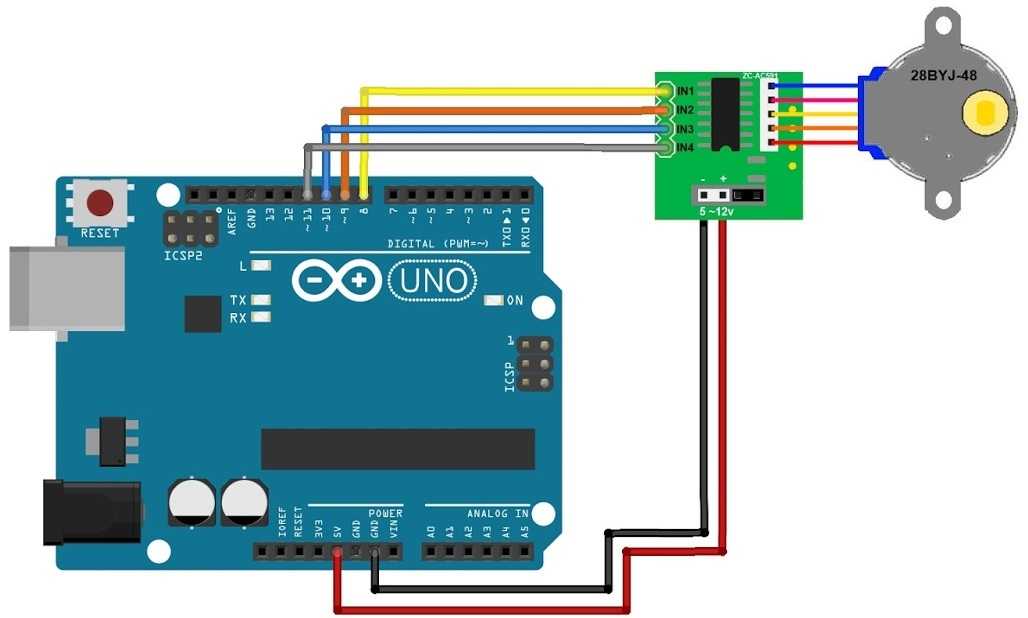 После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
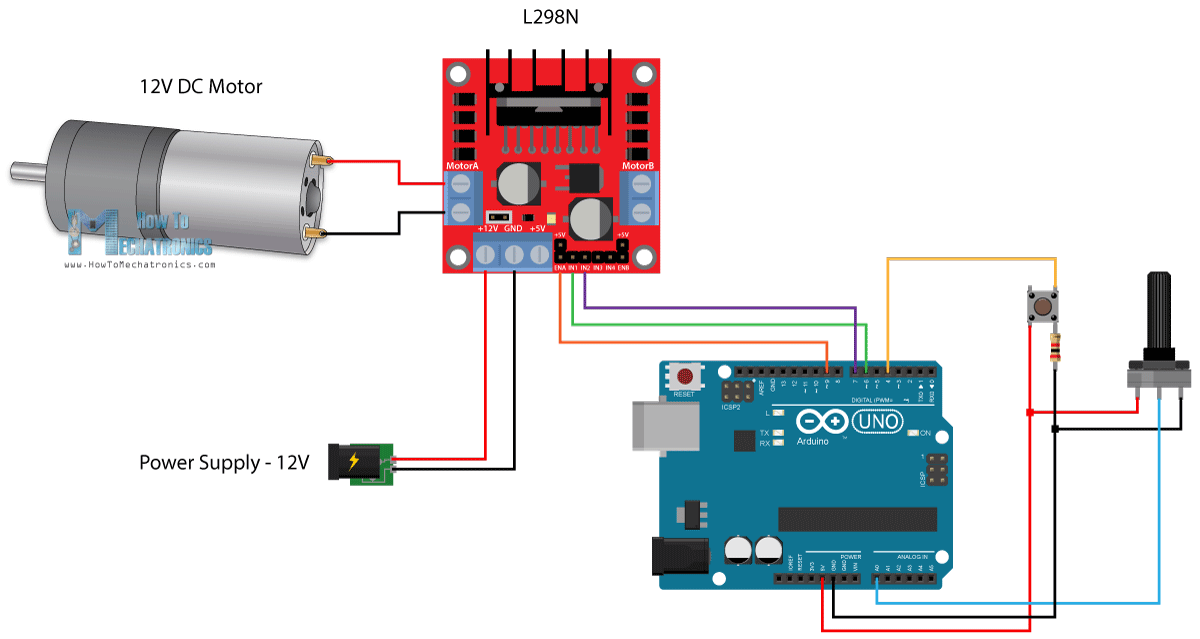
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino.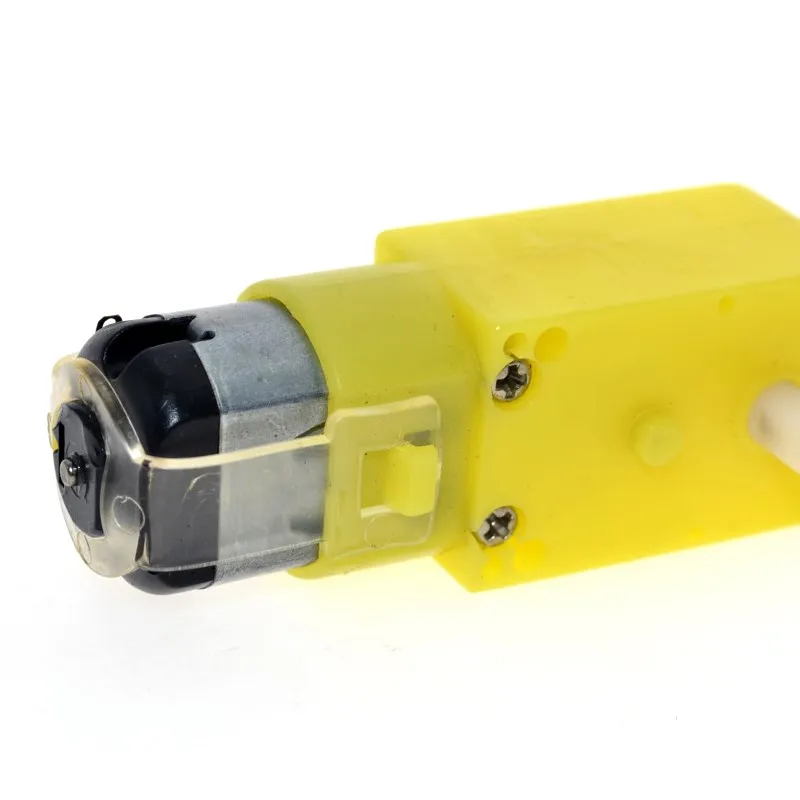 Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель.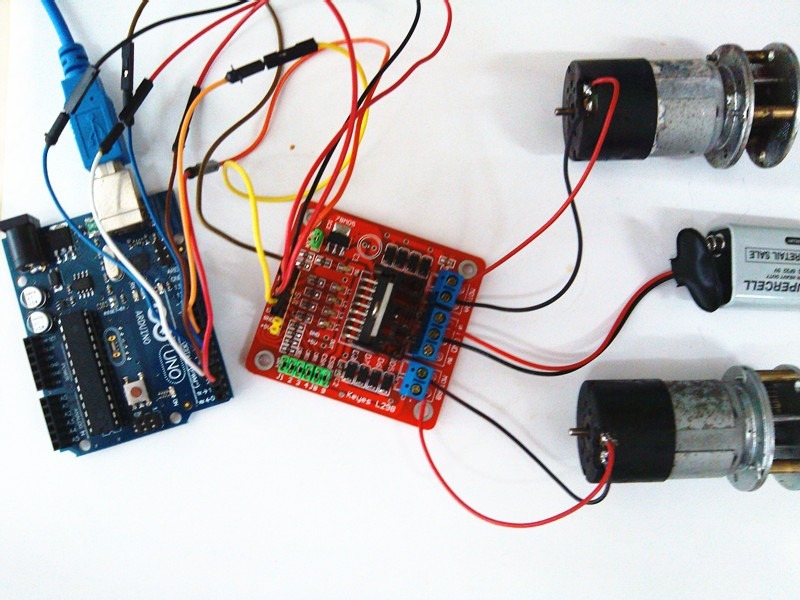 Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Arduino Придбати в Києві, Україна
Arduino Придбати в Києві, Україна
|
Каталог
Arduino
|
|
Ардуино — Мотор | Arduino Tutorial
Мы изучим:
Какие типы двигателей можно использовать с Arduino
Чем отличаются типы двигателей
Как управлять каждым типом двигателей
В Arduino широко используются три типа двигателей:
Серводвигатель
Шаговый двигатель
Двигатель постоянного тока
Серводвигатель включает два основных типа: серводвигатель с углом поворота 180° и серводвигатель с углом поворота 360°. На самом деле, большинство людей неявно понимают «серводвигатель» как «серводвигатель на 180°».
На самом деле, большинство людей неявно понимают «серводвигатель» как «серводвигатель на 180°».
Серводвигатель с углом поворота 360° аналогичен двигателю постоянного тока, за исключением того, что для него не требуется аппаратный драйвер.
Поворот ограничен от 0° до 180°
Направление вращения: по часовой стрелке, против часовой стрелки
Положение вращения: можно управлять поворотом на определенный угол от 0° до 180°
Скорость вращения: можно регулировать, но не плавно
Дополнительный аппаратный драйвер: НЕ требуется. Просто управляйте напрямую с контакта Arduino
Дополнительный источник питания: требуется
Как управлять: легко, просто используйте ШИМ-сигнал
.
Arduino — руководство по серводвигателю
Вращение не ограничено
Направление вращения: по часовой стрелке, против часовой стрелки
Положение вращения: можно контролировать точное вращение в любом угловом положении.

Скорость вращения: точно регулируется. Более того, ускорение и торможение можно точно контролировать
Дополнительный драйвер оборудования: требуется
Дополнительный источник питания: требуется
Как управлять: сложно, новичкам следует пользоваться библиотекой
Автоматика и робототехника
Принтеры, 3D-принтер, ЧПУ, X-Y плоттер,
Автомат для коктейлей
Arduino — руководство по шаговому двигателю
Arduino — руководство по шаговому двигателю с драйвером L298N
Arduino — руководство по шаговому двигателю 28BYJ-48
Вращение не ограничено
Направление вращения: по часовой стрелке, против часовой стрелки
Положение вращения: очень трудно точно повернуть на определенный угол
Скорость вращения: легко контролировать, насколько быстро, но очень трудно точно контролировать определенное значение скорости.
Дополнительный драйвер оборудования: требуется.
Дополнительный источник питания: требуется
Как управлять: легко, просто используйте высоковольтный ШИМ-сигнал
※ ПРИМЕЧАНИЕ:
Для управления положением двигателя постоянного тока нам потребуется дополнительное оборудование, называемое энкодером, а затем использовать метод управления с обратной связью, такой как метод ПИД-регулирования. Это очень сложно для начинающих.
Для контроля скорости мы можем легко контролировать скорость, например, медленную, среднюю, быструю, очень быструю, сколько процентов от полной скорости. Однако, чтобы контролировать количество циклов в секунду, нам нужно дополнительное оборудование, называемое энкодером, а затем использовать метод управления с обратной связью, такой как метод ПИД-управления. Это очень сложно для начинающих.
Некоторые двигатели постоянного тока на рынке имеют встроенный энкодер
Используется для управления чем-то, что должно вращаться непрерывно, но скорость указывать не нужно.
 Например, вентилятор, насос, радиоуправляемая машинка, дрель…
Например, вентилятор, насос, радиоуправляемая машинка, дрель…
※ ПРИМЕЧАНИЕ:
Существует два основных типа двигателей постоянного тока: коллекторные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Коллекторный двигатель постоянного тока широко используется в проектах «сделай сам»
Arduino — руководство по двигателю постоянного тока
Выбор двигателя для проекта в зависимости от многих факторов, таких как переносимый вес, источник питания, характеристики приложения…
Если ваш проект необходимо повернуть в угловое положение между 0° и 180°, найти подходящий серводвигатель на 180°
Если в вашем проекте необходимо точное вращение в любое положение, найдите подходящий шаговый двигатель
Если в вашем проекте требуется точное непрерывное вращение без какой-либо позиции, найдите подходящий двигатель постоянного тока или серводвигатель с поворотом на 360°
| 180° Servo motor SG90 Buy on Amazon | |
| 180° Servo motor MG996R Buy on Amazon | |
| 360° Servo motor FS90R Buy on Amazon | |
| Stepper motor Buy on Amazon | |
| DC motor Buy on Amazon | |
| DC motor with encoder Buy on Amazon | |
| Аппаратный драйвер шагового двигателя и двигателя постоянного тока Купить на Amazon |
Обратите внимание: это партнерские ссылки. Если вы покупаете компоненты по этим ссылкам, мы можем получить комиссию без каких-либо дополнительных затрат для вас. Мы ценим это.
Если вы покупаете компоненты по этим ссылкам, мы можем получить комиссию без каких-либо дополнительных затрат для вас. Мы ценим это.
Посмотрите лучший комплект Arduino для начинающих
※ НАШИ СООБЩЕНИЯ
МОЖНО АРЕНДА. Узнайте, как нанять нас для создания вашего проекта
Если этот урок полезен для вас, пожалуйста, мотивируйте нас сделать больше уроков.
Вы можете поделиться ссылкой на это руководство где угодно. Однако, пожалуйста, не копируйте контент для публикации на других сайтах. Мы потратили много времени и сил на создание содержания этого урока, пожалуйста, уважайте нашу работу!
Подписывайтесь на нас
Поделись с друзьями!
Направляющая двигателя Arduino | 6 проектов Arduino со спином
Выбор правильного двигателя Arduino
В этом руководстве по двигателям Arduino мы рассмотрим основную информацию, которую вам необходимо знать, прежде чем выбрать двигатель для своего проекта. Если вы уже некоторое время работаете над электроникой DIY и чувствуете себя достаточно уверенно в своих способностях, возможно, вы ищете возможности и вознаграждения, работая над более крупными, лучшими и более сложными изобретениями. Когда дело доходит до продвинутых сборок, моторизованные создания, такие как роботы на основе Arduino, часто являются одними из самых популярных; и не без оснований, они очень классные!
Если вы уже некоторое время работаете над электроникой DIY и чувствуете себя достаточно уверенно в своих способностях, возможно, вы ищете возможности и вознаграждения, работая над более крупными, лучшими и более сложными изобретениями. Когда дело доходит до продвинутых сборок, моторизованные создания, такие как роботы на основе Arduino, часто являются одними из самых популярных; и не без оснований, они очень классные!
Существует множество различных типов двигателей Arduino, каждый из которых имеет свои сильные и слабые стороны. По этой причине вы обнаружите, что не каждый двигатель идеально подходит для каждой задачи, некоторые из них превосходны в одних областях, но не справляются с ними в других. Сегодня мы подробно рассмотрим некоторые из многих типов электродвигателей, с которыми вы, вероятно, столкнетесь при покупке электроники, а также несколько советов о том, как, когда и где использовать конкретный двигатель для производства электроники. Убедитесь, что у вас всегда есть правильный комплект для работы в зависимости от того, что вам нужно для вашего нового моторизованного проекта.
И для вдохновения мы также кратко рассмотрим некоторые из моторизованных сборок, которые мы собрали, чтобы помочь вам раскрыть свой творческий потенциал, а также продемонстрируем функциональность некоторых моторов, которые мы будем искать. в. Так что, если вы начинающий творец, желающий освоить двигательные системы Arduino, чтобы вывести свои сборки на новый уровень, то вы определенно попали по адресу.
Типы двигателей Arduino
Серводвигатели
Серводвигатели являются одними из самых популярных двигателей, используемых любителями, которым требуется функциональность двигателя при работе над своими проектами Arduino. Причина их популярности заключается в том, что серводвигатели являются чрезвычайно универсальными электродвигателями.
Серводвигатель — это краткое название обычного двигателя постоянного тока, соединенного с датчиком обратной связи по положению и небольшой платой управления. Это позволяет легко управлять двигателем прямо из коробки через Arduino с использованием сигнала PWM. Серводвигатели являются лучшим выбором среди любителей и широко используются в современной промышленности и, в частности, в робототехнике, где они хорошо зарекомендовали себя в обеспечении точного управления моторикой конечностей роботов, а также в механизированных протезах, используемых людьми с ампутированными конечностями.
Серводвигатели являются лучшим выбором среди любителей и широко используются в современной промышленности и, в частности, в робототехнике, где они хорошо зарекомендовали себя в обеспечении точного управления моторикой конечностей роботов, а также в механизированных протезах, используемых людьми с ампутированными конечностями.
Как это работает
В общих чертах серводвигатель может быть линейным или поворотным приводом, то есть он способен точно управлять линейным или угловым движением. На самом деле это не отдельный тип двигателя, а комбинация двигателя, схемы управления и датчика обратной связи по положению, объединенных в единый рабочий блок
.
Управление серводвигателем
Хотя некоторые сервоприводы предназначены для работы на основе аналоговых импульсов, те, которые обычно можно найти на рынках для любителей, гораздо чаще представляют собой сервоприводы с ШИМ-управлением, предназначенные для работы с микроконтроллерами. С помощью драйвера/усилителя двигателя Arduino (который в схеме управления называется индексатором) управляет порядком электрических импульсов, посылаемых на двигатель через усилитель.
С помощью драйвера/усилителя двигателя Arduino (который в схеме управления называется индексатором) управляет порядком электрических импульсов, посылаемых на двигатель через усилитель.
Pros
- Чрезвычайно универсальные сервоприводы
- Простота управления и программирования через цифровой выход
- Высокая точность — не все
- не требует вычислений контура управления управление вращением
Минусы
- Высокая потребляемая мощность
- Как правило, дороже, чем простые двигатели подходят для больших нагрузок или длительного использования и склонны к стиранию (беззубость со временем)
Двигатели постоянного тока
Хотя стандартный коллекторный двигатель постоянного тока (DC) может быть немного устаревшим, он настолько прост, насколько это возможно. Простые в сборке и дешевые в изготовлении, они используются практически во всех областях, где требуются электродвигатели.
Как это работает
Коллекторный двигатель постоянного тока состоит из нечетного набора токопроводящих обмоток, расположенных вокруг центральной оси, к которой прикреплен коллектор. Внешний узел содержит два магнита с противоположными полярностями. Когда обмотки находятся под напряжением, они заряжаются и начинают притягиваться к внешнему узлу, что приводит к вращению. Этот заряд изменяется, когда щетки соприкасаются с коллектором, что позволяет обмоткам продолжать испытывать притяжение к внешнему узлу, позволяя двигателю вращаться до тех пор, пока подается питание.
Управление двигателем постоянного тока
Как и следовало ожидать, простые двигатели просты в управлении. Что касается мощности, увеличение напряжения или силы тока может регулировать скорость вращения двигателя (об/мин) или крутящий момент соответственно. Чтобы изменить направление вращения двигателя, достаточно просто поменять полярность контактов двигателя.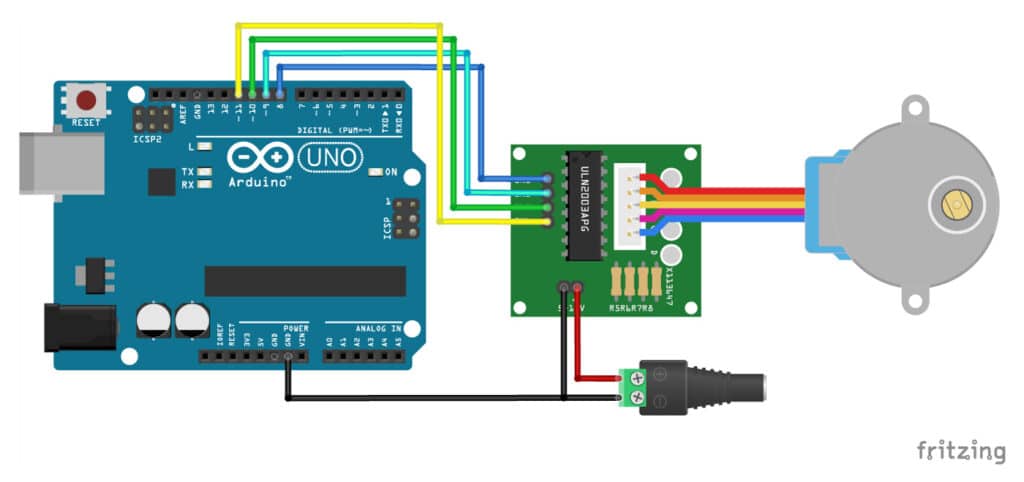
Для достижения большей точности, требуемой в современных приложениях, коллекторные двигатели постоянного тока могут быть соединены с устройством, называемым колесным энкодером/вращающимся энкодером. Эти устройства способны считывать и определять угловое положение оси двигателя, а затем микроконтроллер преобразует выходной сигнал в цифровую информацию. Эти данные можно использовать для определения местоположения, скорости двигателя и ускорения двигателя, к которому он подключен.
Pros
- Высокий крутящий момент
- Простая сборка и легко контролировать
- Очень дешево для производства
Cons
- и разрывы на кистях. нагрев щеток и повреждение двигателя
- небольшое количество электромагнитных помех на радиочастотах
- требует дополнительных вычислений для управления с обратной связью
Запуск цепи двигателя постоянного тока
Шаговый двигатель
Вариант обычного двигателя постоянного тока.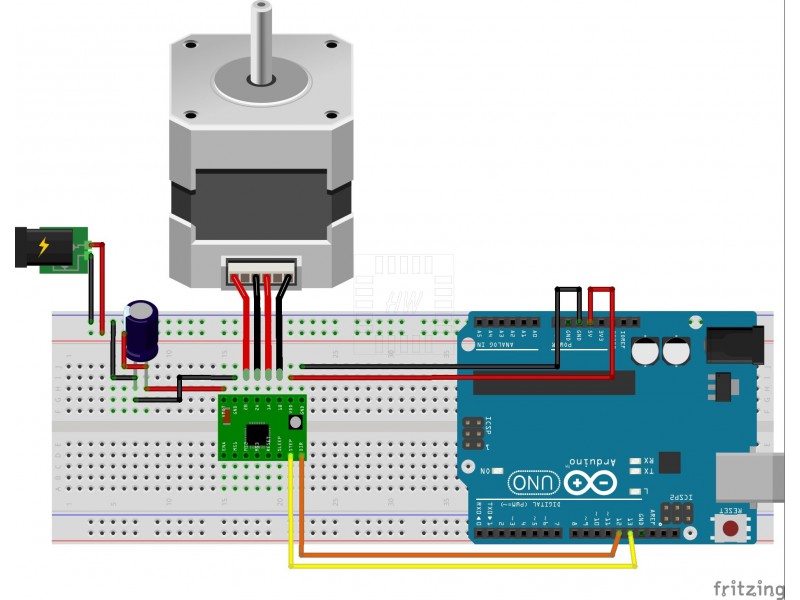 Шаговый двигатель является оптимальным выбором, когда вам нужен двигатель, способный к точно контролируемым движениям для обеспечения точности, превышающей возможности стандартного двигателя. . Они обычно используются в полиграфической промышленности, а также в простых роботах, таких как заводские роботы-манипуляторы, сконфигурированные для конкретных задач.
Шаговый двигатель является оптимальным выбором, когда вам нужен двигатель, способный к точно контролируемым движениям для обеспечения точности, превышающей возможности стандартного двигателя. . Они обычно используются в полиграфической промышленности, а также в простых роботах, таких как заводские роботы-манипуляторы, сконфигурированные для конкретных задач.
Как работает этот двигатель
В отличие от других двигателей, которые предназначены для обеспечения неограниченного вращения при использовании, шаговые двигатели предназначены для перемещения на определенное количество «шагов» с определенной скоростью при включении питания. При каждой зарядке мотор обеспечивает достаточную мощность для одного шага. Насколько мал каждый «шаг», указывает на общую точность двигателя.
Управление шаговым двигателем
В отличие от других типов двигателей, шаговый двигатель предназначен для использования с более совершенной электроникой, чтобы использовать преимущества точного управления двигателем, на которое он способен. По этой причине для шаговых двигателей требуется схема драйвера, которая соединяет их с системой управления (например, Arduino), способной регулировать мощность двигателя.
По этой причине для шаговых двигателей требуется схема драйвера, которая соединяет их с системой управления (например, Arduino), способной регулировать мощность двигателя.
Pros
- Чрезвычайно точное управление работой
- Простота строительства и надежности
- Высокий крутящий момент — не все
- Контроль с открытой петлей
Cons
- Высокоспециализированное использование
- Требуется передовая система управления для надлежащей работы
. Бесщеточный двигатель
Являясь эволюцией щеточного двигателя, бесщеточные двигатели быстро становятся предпочтительными двигателями для многих любителей и энтузиастов благодаря огромному потенциалу и повышенной надежности по сравнению с их предшественниками. Как и щеточные двигатели, они обеспечивают хороший крутящий момент, а также могут надежно работать на высоких оборотах. Это делает бесщеточный двигатель чрезвычайно универсальным, очень эффективным в качестве двигателя Arduino и особенно популярным среди тех, кто собирает радиоуправляемые автомобили или дроны.
Как это работает
Бесщеточный двигатель использует переменный ток для создания противоположных зарядов между обмотками и магнитами на внешнем узле. В этой конструкции вращается только внешний узел, прикрепленный к оси; Преимущество наличия только одной движущейся части в сочетании с отсутствием необходимости в контактных щетках заключается в том, что бесщеточные двигатели обладают более высокой энергоэффективностью, более длительным сроком службы, плавной передачей механической энергии на ось и низким коэффициентом трения.
Управление бесщеточным двигателем
Несмотря на то, что им труднее управлять, чем простым щеточным двигателем, использование современных технологий значительно упрощает управление ими с помощью компьютеров. Датчики на эффекте Холла, которые могут обнаруживать изменения в магнитных полях и преобразовывать их в цифровую информацию, часто используются с бесщеточными двигателями для контроля и управления их выходным сигналом, точно так же, как колесные энкодеры используются с щеточными двигателями.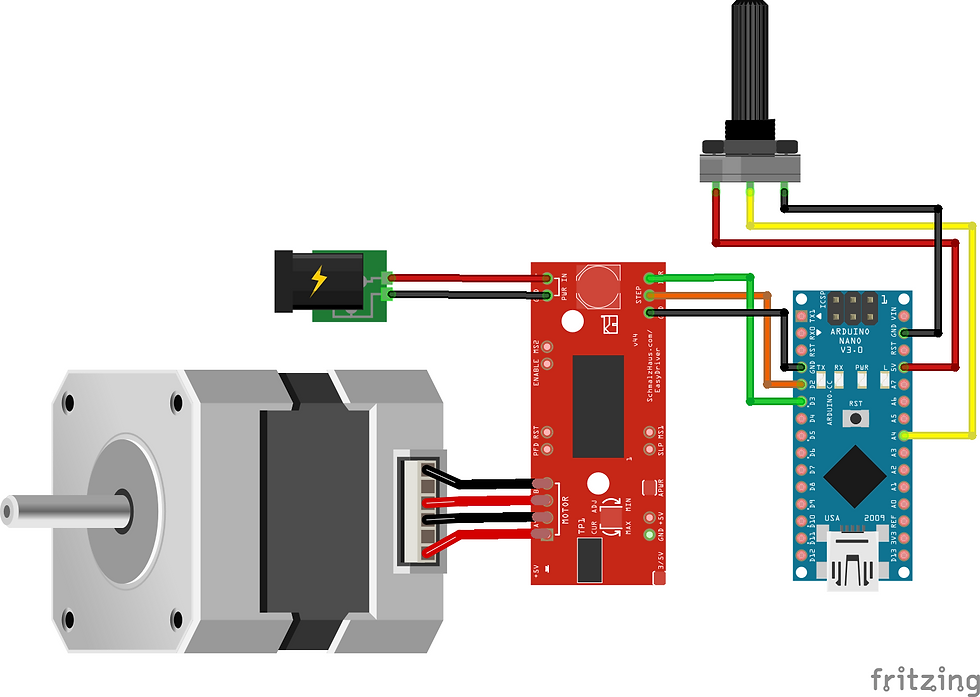
Pros
- Долгий срок службы
- Единая подвижная часть обеспечивает высокую надежность
- Конструкция с низким коэффициентом трения, позволяющая работать в течение длительного времени на высоких скоростях регулировать подачу питания
Запустить схему бесщеточного двигателя
Параметры для выбора двигателя Arduino
Выбор правильного двигателя для вашего проекта часто зависит от типа проекта, который вы пытаетесь построить, и от того, какие показатели производительности будут определять идеальный мотор для вас. Есть три основных параметра, которые взаимозависимы и которые нам необходимо учитывать при выборе правильного двигателя для нашего проекта
Крутящий момент
Хотя в этой статье мы не будем углубляться в серьезную математику и физику, понимание номинального крутящего момента вашего двигателя и того, как он влияет на ваши решения при выборе двигателя для вашего проекта, важно, чтобы убедиться, что Вы выбираете двигатель, который соответствует вашим потребностям или ожиданиям.
Проще говоря, номинальный крутящий момент двигателя — это сила вращения, которую двигатель способен оказывать на нагрузку. Крутящий момент определяется по простой формуле:
Крутящий момент = Расстояние от оси вращения X Сила
В качестве примера того, как крутящий момент влияет на ваши творения, мы можем рассмотреть другую область, где крутящий момент важен, — автомобильный сектор. При подъеме на холмы или крутые дороги предпочтительнее использовать двигатель с высоким крутящим моментом, так как он способен прикладывать большее усилие к грузу (автомобилю), позволяя ему двигаться в гору даже на низких скоростях или при трогании с места.
Высокий номинальный крутящий момент важен для поддержания высокой скорости вращения двигателя, например, в дроне. Двигатель с высоким крутящим моментом может быстро изменять значения оборотов, что должно привести к более плавной и более отзывчивой работе электромобиля, использующего такой двигатель. Хорошими вариантами для тех, кто ищет двигатели с высоким крутящим моментом, являются стандартные коллекторные двигатели постоянного тока, которые, хотя и дешевы, имеют более короткий срок службы и требуют большего обслуживания, или более дорогие, но более надежные и энергоэффективные бесщеточные двигатели постоянного тока.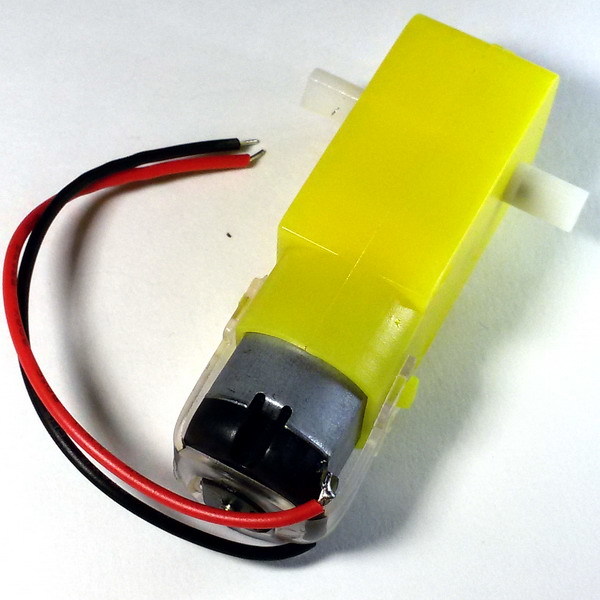
Поддержание номинального крутящего момента двигателей в соответствии с потребностями вашего творения важно для обеспечения долговременной работы, так как слишком низкий номинальный крутящий момент делает ваше творение неработоспособным, а слишком высокий крутящий момент может вызвать механическое напряжение во время работы. Хотя риск катастрофического отказа из-за чрезмерно высокого крутящего момента невелик, когда речь идет об электронике DIY, он все же может привести к более быстрому износу деталей и сокращению срока службы вашего нового изобретения.
Напряжение — скорость/об/мин
В данном контексте скорость — это скорость, с которой вращается электродвигатель. Эта угловая скорость вращения измеряется в оборотах в минуту или об/мин, и наряду с крутящим моментом являются двумя основными факторами, влияющими на работу двигателя. Проще говоря, если двигатель с высоким крутящим моментом хорош для перемещения более тяжелых грузов на низкой скорости, система привода с высокими оборотами позволит работать на более высоких скоростях, снижая при этом общую грузоподъемность.
При добавлении двигателя Arduino в проект вам необходимо принять во внимание ваш источник питания — стену или аккумуляторы и убедиться, что характеристики напряжения двигателя соответствуют, чтобы получить максимальную отдачу от него.
Для продвинутых строителей коробка передач, подобная используемой в обычных автомобилях, позволяет двигателям хорошо работать в обоих режимах по мере необходимости. Те из вас, кто водит машину, уже знают, что более низкие передачи дают достаточно крутящего момента, чтобы начать движение, но вам нужно быстро переключаться на 2-ю и 3-ю передачи, чтобы поддерживать ускорение. И если вы когда-нибудь пробовали трогаться с места на высокой передаче, скажем, на 4-й или 5-й на механической коробке передач, вы знаете, как высокие обороты без достаточного крутящего момента или инерционного момента ни к чему быстро не приведут.
В общем, бесколлекторный двигатель — отличный вариант для тех, кому нужен разумный крутящий момент, надежность и энергоэффективность даже при более высоких оборотах, но не интересует вес и сложность редуктора.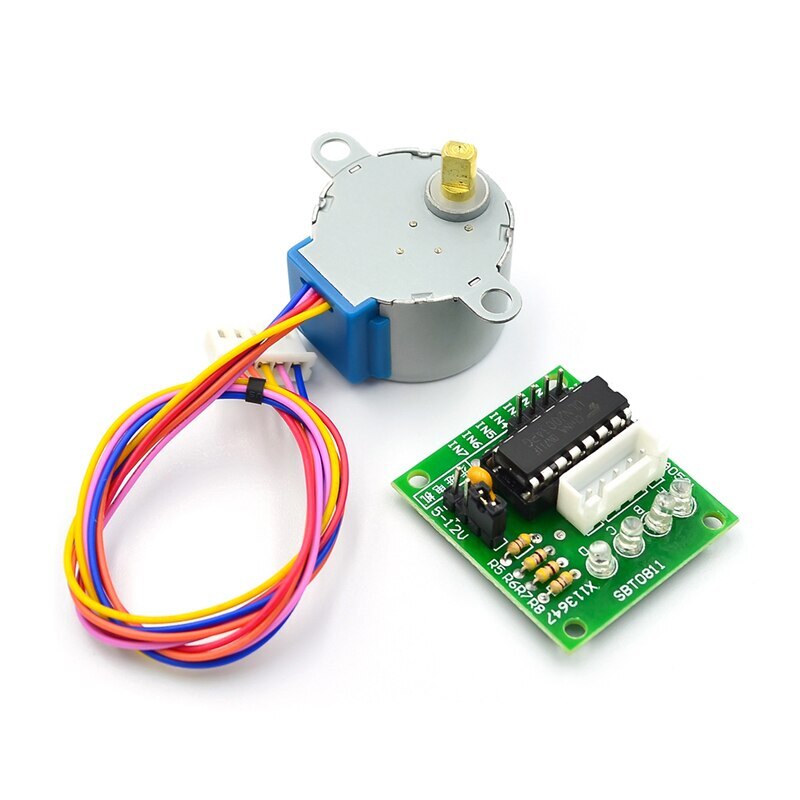
Сила тока/сила тока
При выборе электродвигателя важно выбрать тот, который способен обеспечить необходимую мощность, сохраняя при этом потребляемую мощность в допустимых пределах. Мощность (электроэнергия) – вольты х ампер. В то время как напряжение связано с увеличением оборотов двигателя, для увеличения крутящего момента также требуется более высокий номинальный ток. Имея мощный двигатель, рассчитанный на работу с высоким напряжением и силой тока, это приводит к более высоким требованиям к нагрузке по мощности.
Хотя это вряд ли повлияет на проекты, использующие электропитание от настенных розеток, проекты, предназначенные для большей портативности, такие как беспилотные транспортные средства, роботы и носимые устройства, должны будут учитывать требования к двигателям, поскольку для питания проекта потребуются батареи. настроить так, чтобы обеспечить достаточную мощность. По этой причине при разработке портативной электроники всегда предпочтение отдается двигателям, которые настолько малы, легки и эффективны, насколько это возможно, чтобы свести к минимуму потребляемую мощность и вес (как самого двигателя, так и размера источника питания, необходимого для его работы).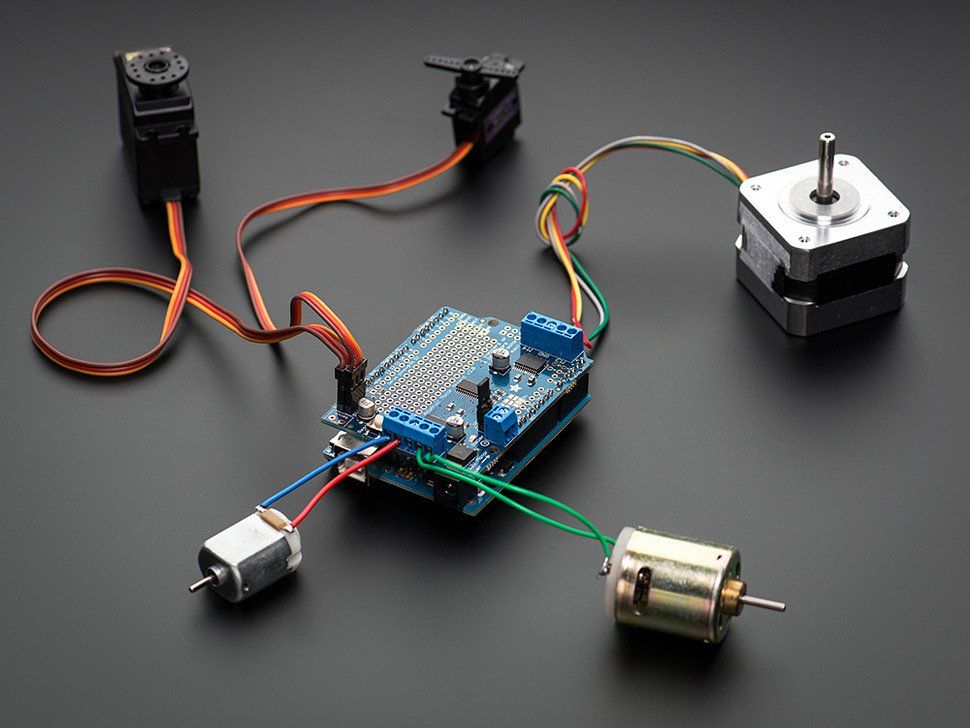 ).
).
Есть много других факторов, которые влияют на выбор правильного двигателя, но хорошего понимания этих трех основных критериев должно быть достаточно, чтобы направить вас в правильном направлении. Хотя теоретически любой электродвигатель может быть адаптирован для выполнения практически любой функции с некоторой изобретательностью, теперь у вас должно быть все необходимое, чтобы выбрать оптимальный двигатель/двигатели, которые лучше всего подходят для вашего проекта.
В следующем разделе мы рассмотрим практическое применение некоторых типов двигателей, которые мы обсуждали выше, в нескольких проектах, которые мы собрали здесь, на Circuito.io.
Примеры проектов двигателей Arduino
У нас всегда есть несколько интересных проектов, которые мы собираем здесь, на Circuito.io, и в этом разделе мы хотели выделить несколько наших проектов двигателей Arduino, в которых используются различные типы двигателей и действительно продемонстрируйте, что вы можете сделать с каждым из них.
Название каждого проекта связано со страницей этого проекта, где вы можете узнать, как управлять различными двигателями, а также получить доступ к нашему инструменту для сборки, где вы можете быстро и легко изменить один из наших рекомендуемых проектов или даже создать свой собственный с нуля. .
Проект двигателя Arduino №1: кормушка для домашних животных с Интернетом вещей
Эта кормушка для домашних животных с подключением к Интернету идеально подходила для работы с одним серводвигателем, поскольку диапазон вращения, необходимый для раздачи корма, был ограничен. Использование серводвигателя здесь оказалось дешевым, компактным и простым в использовании решением, поскольку для его работы не требовалось никаких дополнительных деталей, требовалось минимальное электропитание и оно было надежным даже при длительном использовании.
Двигатель Arduino. Проект №2: Следящий за линией
Для следящего за линией робота мы использовали 2 стандартных коллекторных двигателя постоянного тока. Коллекторные двигатели — хороший выбор при сборке небольших колесных ботов, таких как этот, поскольку двигатель с редуктором обеспечивает высокий крутящий момент, прост в управлении и очень дешев.
Коллекторные двигатели — хороший выбор при сборке небольших колесных ботов, таких как этот, поскольку двигатель с редуктором обеспечивает высокий крутящий момент, прост в управлении и очень дешев.
Поскольку бот такой маленький и легкий, экономия энергии за счет перехода на бесколлекторный двигатель постоянного тока на самом деле не требуется. Для этого проекта необходима дополнительная передача, чтобы преобразовать скорость двигателя постоянного тока в крутящий момент. При использовании двигателя постоянного тока кодирование довольно простое, а ускорение и скорость легко контролируются. Однако вам нужно будет создать отдельную систему привода, чтобы получать команды от Arduino и преобразовывать эти команды в электрические импульсы, известные как драйвер двигателя постоянного тока. Вам также может потребоваться поворотный энкодер или подобное устройство для преобразования обратной связи от двигателя в цифровую информацию, чтобы Arduino мог отслеживать свое собственное положение и прогресс.
Проект двигателя Arduino №3: Роботизированная рука
Этот классический проект — один из лучших способов продемонстрировать серводвигатели Arduino в действии. Всего в роботизированной руке используется 3 серводвигателя, по одному на каждое сочленение руки, обеспечивающее необходимое срабатывание.
Поскольку этот робот-манипулятор работает по простой предварительно закодированной команде, а не активно обнаруживает объекты для взаимодействия в пределах досягаемости, этот проект идеально подходит для тех, кто плохо знаком с проектами двигателя Arduino, или даже для новичков, которые хотят начать работу с более сложной проект, в который они действительно могут вонзить свои зубы.
Важным фактором, который следует учитывать, является обеспечение достаточной мощности серводвигателей, которые вы используете, для эффективной работы в зависимости от предполагаемого размера манипулятора робота.
Двигатель Arduino. Проект №4: Мини-лифт с управлением через Bluetooth через Arduino. Двигатель был настроен так, чтобы он мог выдвигать автомобиль вниз, вращаясь в одном направлении, и извлекать его, вращая в противоположном направлении, пока «автомобиль» не вернется в исходное положение. Предварительно запрограммировав количество шагов вращения, необходимых для безопасного опускания «кабины» подъемника, система смогла управлять подъемником без заминок. Эта установка будет работать хорошо при условии, что вес груза в подъемнике не слишком велик, чтобы шаговый двигатель потерял тягу, что привело к пропуску шагов и нарушению надлежащего выравнивания. Одним из способов преодолеть эту неудачу и увеличить грузоподъемность было бы добавить к двигателю коробку передач для увеличения крутящего момента. В качестве альтернативы мы могли бы заменить шаговый двигатель стандартным коллекторным двигателем постоянного тока с редуктором; сочетая его естественно более высокий номинальный крутящий момент с дополнительным концевым выключателем, чтобы предоставить блоку управления Arduino информацию о положении, чтобы он мог измерять вращения и обеспечивать такой же контроль над подъемом, как и при использовании шагового двигателя.
Двигатель был настроен так, чтобы он мог выдвигать автомобиль вниз, вращаясь в одном направлении, и извлекать его, вращая в противоположном направлении, пока «автомобиль» не вернется в исходное положение. Предварительно запрограммировав количество шагов вращения, необходимых для безопасного опускания «кабины» подъемника, система смогла управлять подъемником без заминок. Эта установка будет работать хорошо при условии, что вес груза в подъемнике не слишком велик, чтобы шаговый двигатель потерял тягу, что привело к пропуску шагов и нарушению надлежащего выравнивания. Одним из способов преодолеть эту неудачу и увеличить грузоподъемность было бы добавить к двигателю коробку передач для увеличения крутящего момента. В качестве альтернативы мы могли бы заменить шаговый двигатель стандартным коллекторным двигателем постоянного тока с редуктором; сочетая его естественно более высокий номинальный крутящий момент с дополнительным концевым выключателем, чтобы предоставить блоку управления Arduino информацию о положении, чтобы он мог измерять вращения и обеспечивать такой же контроль над подъемом, как и при использовании шагового двигателя.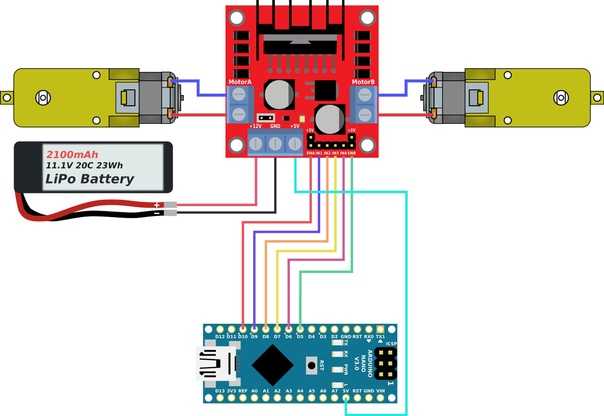
Начните свой собственный проект
Проект Arduino Motor #5:
Поворотный стол для фотографий
Поворотный стол для фотографий — это проект, который мы давно хотели создать, поскольку нам нужно сделать 360 изображений компонентов, которые мы используем, и проектов, которые мы строить. Мы провели исследование в Интернете и увидели, что многие проигрыватели используют серводвигатели, но мы подумали, что в этом случае серводвигатель не будет достаточно точным, поэтому решили использовать шаговый двигатель. Еще одним преимуществом шагового двигателя является более простое программирование — использование шагов двигателя для измерения расстояния между углами съемки.
Arduino Motor Project #6:
Аниматронный хвост
Последним, но не менее важным в нашем списке, является аниматронный хвост, одна из наших наиболее сложных конструкций и наше самое первое автономное моторизованное носимое устройство. Сборка состоит из 3-х серводвигателей, расположенных вокруг основания хвоста.
Поскольку мы хотели разместить сервоприводы близко к основанию, нам нужно было придумать способ обеспечить разнонаправленное движение без размещения сервоприводов в других шарнирах хвоста. Это было достигнуто за счет соединения каждого сервопривода со шкивом, который преобразовывал угловое вращательное движение серводвигателя в линейный эффект толкания / тяги на хвостовой части с помощью нитей, которые поддерживали натяжение между шкивом и хвостовой частью. В дополнение к запрограммированным движениям хвоста был также установлен джойстик, позволяющий оператору вручную управлять движением хвоста для более анимированных или подчеркнутых действий.
Сервоприводы, оснащенные металлическими шестернями для придания дополнительной прочности, располагались вокруг основания хвоста, позволяя ему двигаться влево и вправо, а также вверх и вниз. Хотя это творение было несколько сложным и требовало сложной сборки, за счет того, что все двигатели и батареи располагались близко к основанию хвоста, распределение веса было настолько хорошим, насколько мы могли надеяться, без батарей, двигателей или проводки, необходимых дальше в хвосте. который оставался пустым и оставался хорошо сбалансированным и удобным в использовании.
который оставался пустым и оставался хорошо сбалансированным и удобным в использовании.
—
Хотя поначалу это может показаться сложным, выбрать правильный двигатель для вашего следующего творения Arduino на самом деле довольно просто, если вы понимаете, в чем превосходит каждый тип двигателя; а также четкое понимание того, что вы ожидаете или требуете от выбранного вами двигателя с точки зрения мощности и крутящего момента, чтобы ваше творение функционировало эффективно.
Помимо требований к производительности, также важно учитывать другие факторы, такие как уровень вашего опыта и знакомство с определенными типами двигателей, а также их стоимость, при принятии решения о покупке или выборе нового творения. Если вы знакомы с определенным типом аппаратного обеспечения или у вас уже есть несколько моторов, может оказаться намного дешевле просто спроектировать свою сборку на основе того, что у вас есть под рукой или с чем вам удобно работать, а не использовать дополнительные моторы, экономя ваше время и деньги в долгосрочной перспективе.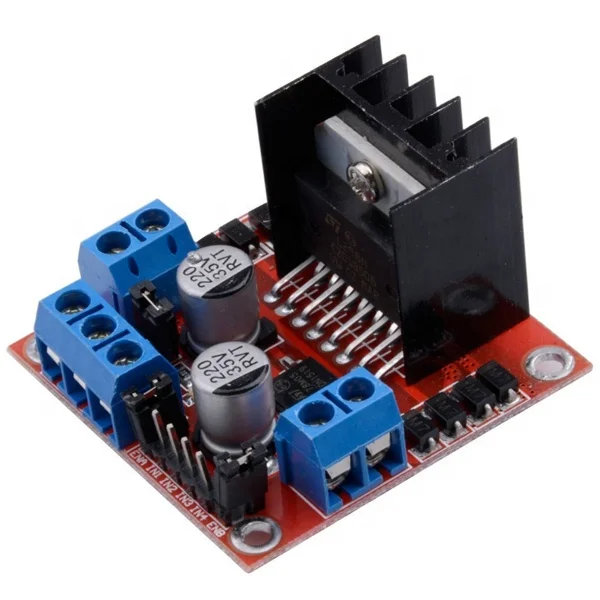
Всего комментариев: 0