Промышленная робототехника определение: что такое промышленный робот (устройство), какие бывают, как выглядит и из чего состоит
Содержание
Промышленная робототехника — frwiki.wiki
Промышленный робот Kawasaki FS-03N, сварочный робот
Промышленный робот официально определен Международной организацией по стандартизации ( ISO ) в качестве системы с автоматическим управлением, мульти-приложений, перепрограммируемые, многофункциональная, манипулятором программируемые в три или более осей.
Типичные области применения включают роботов для сварки, покраски и сборки . Преимущество промышленной робототехники — это скорость выполнения и точность, а также повторение этой точности с течением времени.
Однако опрос, проведенный ОЭСР в 2018 году, показывает, что промышленная роботизация означает потерю рабочих мест примерно на 15% и изменение для 32% из них.
Промышленные роботы широко используются в автомобильной промышленности . Их проектирование требует хороших технических знаний и очень высокого уровня в области инженерии .
Резюме
- 1 Определение
- 2 История
- 3 Промышленная робототехника в мире
- 4 Области использования
- 5 типов промышленных роботов
- 5.
 1 Шарнирно-сочлененные роботы
1 Шарнирно-сочлененные роботы - 5.2 Декартовы роботы
- 5.3 Цилиндрические роботы
- 5.4 Дельта-роботы
- 5.5 Полярные роботы
- 5.6 Роботы SCARA
- 5.
- 6 Эксплуатация
- 7 Программирование
- 8 производителей
- 9 Список промышленных роботов
- 9.1 Промышленные роботы
- 9.2 Доильные роботы (сельское хозяйство)
- 10 Примечания и ссылки
- 10.1 Примечания
- 10.2 Ссылки
- 11 Приложения
- 11.1 Статьи по теме
- 11.2 Внешние ссылки
 1 Шарнирно-сочлененные роботы
1 Шарнирно-сочлененные роботы Определение
Промышленный робот Motoman SDA10, сборочный робот
Промышленный робот — это система, имеющая несколько осей, таких как человеческая рука, часто состоящая из шести степеней свободы, трех осей, предназначенных для позиционирования, и трех осей для ориентации, позволяющих перемещать и ориентировать инструмент (исполнительный орган) в заданном рабочем пространстве.
Мы можем выделить:
- сборочные роботы часто меньших размеров,
- мобильные роботы, предназначенные для инспекций, часто связанные с искусственным интеллектом и способные в некоторых случаях учитывать окружающую среду.
Робот состоит из механической части, самой руки, шкафа управления, состоящего из центрального блока, который управляет управляющей электроникой одной или нескольких осей, обеспечивающих сервоуправление приводами с регулируемой скоростью. Скорость и специализированный язык программирования, позволяющий управлять роботом (LM, разработанный Ensimag Grenoble, базовый язык типа Adept), который объединяет преобразователь координат для преобразования декартовых значений в данные кодировщика двигателя.
Некоторые роботы имеют режим обучения, который позволяет повторять движения, выполняемые свободно вручную, при этом важным элементом является верность способности робота последовательно достигать одного и того же положения в пределах определенного допуска, процедура калибровки позволяет принимать нулевое значение. каждая из осей. Их можно связать с системой искусственного зрения, которая позволяет им корректировать движения.
каждая из осей. Их можно связать с системой искусственного зрения, которая позволяет им корректировать движения.
Из соображений безопасности эти роботы защищены клетками или кожухами, чтобы люди не приближались к ним слишком близко.
Распространение и совершенствование робототехники позволяет фабрикам работать в темноте .
История
Предки роботов роботов, тем XVII — го века. В некотором смысле, поскольку компьютеры сделали их полностью интерактивными с людьми, первые роботы были первыми компьютерами, разработанными во время Второй мировой войны и созданными вскоре после этого. Но их действия ограничиваются интеллектуальными операциями, поэтому первые роботы, строго говоря, представляют собой устройства, которые, синтезируя автоматы и компьютеры, могут автоматически выполнять физические задачи вместо людей, причем более эффективно, быстро и точно.
В 1954 году американец Джордж Девол подал патент на первого промышленного робота Unimate .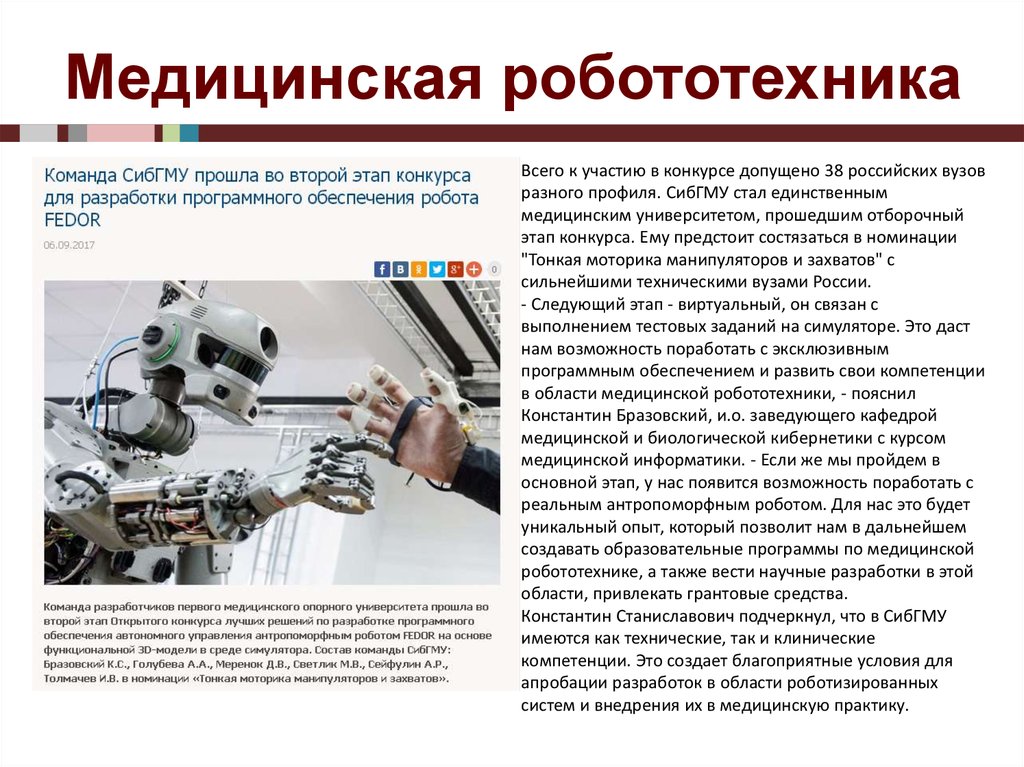 Это шарнирно-сочлененная рука, способная переносить объект из одного места в другое, вдохновленная телеоператорами, использовавшимися в ядерной промышленности в 1950-х годах для манипулирования радиоактивными элементами.
Это шарнирно-сочлененная рука, способная переносить объект из одного места в другое, вдохновленная телеоператорами, использовавшимися в ядерной промышленности в 1950-х годах для манипулирования радиоактивными элементами.
В 1956 году партнером Devol Джозефом Энгельбергером была создана
компания Unimation Inc.
В 1961 году Unimate был установлен на сборочных линиях завода Ewing Township (принадлежащего General Motors и расположенного в пригороде Трентона, штат Нью-Джерси ), Unimate . Он отвечает за то, чтобы собирать куски металла при очень высоких температурах и перемещать их в охлаждающие ванны. В то время руководство General Motors не публиковало информацию, полагая, что это экспериментальный процесс, который может не сработать. Однако в итоге было заказано 66 экземпляров.
В 1968 году Unimation была мировым лидером в области робототехники.
В 1976 году первой компанией, внедрившей свою продукцию во Франции, была Renault в 1976 году.
В 1983 году компания Westinghouse (у истоков первых роботов-гуманоидов ) купила Unimation Inc. , а три года спустя продала ее Stäubli .
, а три года спустя продала ее Stäubli .
Промышленная робототехника по всему миру
По данным Министерства промышленности Франции, общее количество промышленных роботов в мире оценивается как минимум в 1,15 миллиона в 2010 году и ожидается, что в 2017 году ожидается 3,58 миллиона. Эти оценки основаны на предположении, что средний срок службы составляет 12 штук. годы. При средней продолжительности жизни в 15 лет в 2011 году будет 1,4 миллиона промышленных роботов.
Около 69 000 промышленных роботов было произведено в мире в 1998 году, 120 000 в 2005 году, но 113 000 в 2008 году. Производство резко упало в 2009 году (60 000), чтобы снова подняться (120 600 в 2010 году, 166 000 в 2011 году, 207 500 ожидается в 2015 году).
В 2011 году объем продаж промышленных роботов составил 9,5 миллиарда долларов. Рынок промышленных роботизированных систем, включая программное обеспечение, периферийные устройства и системную инженерию, оценивается в 28,5 млрд долларов в 2011 году; ожидается, что в будущем он будет увеличиваться, но более низкими темпами, чем в прошлом.
По данным Международной федерации робототехники, Китай является рынком номер один для промышленных роботов: в 2017 году было продано 141000 единиц, что составляет ежегодный скачок на 58,1% и составляет треть мирового спроса.
Области использования
- Промышленные роботы были сначала разработаны для работы в среде с высоким риском ( ядерной, сильно корродированной и т. Д.), А затем в автомобиле с роботом Unimate, первым промышленным роботом американской компании Unimation, в начале 1960-х годов.
- Они также часто используются при работе с тяжелыми предметами.
- Небольшая точность сборки на небольших сериях.
Виды промышленных роботов
Шарнирно-сочлененные роботы за работой на заводе
Некоторые роботы запрограммированы на точное выполнение определенных повторяющихся действий. Они запрограммированы с высокой степенью точности. Другие роботы гораздо более гибкие. Например, они используются в живописи. Искусственный интеллект является важным фактором в промышленной робототехнике.
Искусственный интеллект является важным фактором в промышленной робототехнике.
Шарнирно-сочлененные роботы
В шарнирных роботах являются наиболее распространенными промышленными роботами. Они похожи на человеческую руку, поэтому их еще называют роботизированной рукой или рукой манипулятора . Их шарнирно-сочлененные конструкции с несколькими степенями свободы обеспечивают шарнирно-сочлененным рукам широкий диапазон движений.
Декартовы роботы
Декартов робот с 5 осями для пластмассовой промышленности
Мы называем декартовым роботом роботов, имеющих шарнирные соединения призматического типа для перемещения инструмента, но обязательно 3 ротоида для ориентации этого инструмента.
Чтобы иметь возможность перемещать и ориентировать эффекторный орган во всех направлениях в 3D, такому роботу необходимо 6 осей: 3 призматических для движения, 3 ротоида для ориентации. В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
Цилиндрические роботы
Эти цилиндрические роботы различаются по их радиальному уплотнению в основании и по меньшей мере один призматические уплотнение элементов, соединяющие. Они могут перемещаться вертикально и горизонтально, скользя. Компактная конструкция исполнительного механизма позволяет роботу достигать тесных рабочих пространств без потери скорости.
Дельта-роботы
В роботы Delta также называют робот параллельным соединением. Они состоят из параллельных звеньев, соединенных с общей базой. Роботы Delta особенно полезны для задач прямого управления и операций с высоким маневрированием (например, для задач быстрой посадки и высадки). Роботы Delta используют систему четырех стержневых или параллелограммных рычагов .
Полярные роботы
Мы называем полярным роботом роботов, имеющих только сочленения ротоидного типа . Чтобы иметь возможность перемещать и ориентировать эффекторный орган во всех направлениях в 3D, такому роботу необходимо 6 осей: 3 для движения, 3 для ориентации. В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
Роботы SCARA
SCARA — это аббревиатура от Selective Compliance Assembly Robot Arm . Роботов SCARA можно узнать по двум параллельным шарнирам, которые обеспечивают движение в плоскости XY. Вращающиеся валы расположены вертикально, а концевой эффектор перемещается горизонтально.
Роботы SCARA используются для выполнения работ, требующих точных боковых перемещений, и они идеально подходят для сборки.
Функционирование
Одни роботы используют электродвигатели, другие — гидроцилиндры . Первые работают быстрее, вторые — прочнее и удобнее в таких применениях, как распыление краски.
Программирование
Программирование движений робота на компьютере
Движения промышленного робота программируются двумя основными способами.
Метод обучения впервые появился в истории. Он состоит в создании траекторий, заставляя робота запоминать точки, соответствующие декартовым координатам и определяющие его положение. Это делается непосредственно на роботе с помощью блока управления.
Это делается непосредственно на роботе с помощью блока управления.
Второй и более свежий метод — это автономное программирование . На специальном рабочем компьютере оператор может запрограммировать следующую задачу с помощью программного обеспечения для автономного программирования, импортировав модель САПР, с помощью которой он может генерировать движения. Затем он сможет визуализировать результат своего программирования с помощью интегрированного симулятора, который представляет собой виртуальное представление рабочей среды робота со всеми ее компонентами.
- 1. Перейти к P1
- 2. Перейдите к P2.
- 3. Перейдите на P3.
- 4. Закройте зажим.
- 5. Перейдите к P2.
- 6. Перейти к P4.
- 7. Перейти к P5.
- 8. Откройте зажим.
- 9. Перейти к P4.
- 10. Перейдите к P1 и закончите.
Строители
- Япония : OMRON Corporation
- Швейцария : Stäubli International AG
- Швейцария / Швеция : ABB Robotics
- США : Adept Technology
- Германия : Bosch
- Германия : Cloos GmbH
- Германия : Festo
- Германия : Дюрр (живопись)
- Германия : Ротег
- Австрия : IGM
- Италия : Комау
- Япония : DENSO Robotics
- Япония : Epson Robots
- Япония : FANUC Robotics
- Япония : Fuji Yusoki Robotics
- Южная Корея : Hyundai Robotics
- Япония : интеллектуальный привод (IAI)
- США : Intelitek
- Япония : Яноме
- Япония : Kawasaki Heavy Industries
- Германия : Кука
- Испания : Локсин
- Франция : Робототехника Шавериа
- Франция : LUCAS France
- Франция : MIP robotics
- Япония : Mitsubishi Electric.
- Япония : Яскава-мотоман
- Япония : Nachi Robotic Systems Inc.
- Япония : Нидек Санкё
- Япония : OTC-Daihen
- Япония : Panasonic Corporation
- Германия : Reis Robotics
- Южная Корея : Samsung
- Франция : SCEMI (бывшая дочерняя компания Alsthom), деятельность которой в области робототехники прекратилась в 1980-х годах.
- Франция : SEPRO Group
- США / Великобритания : ST Robotics
- Япония : Toshiba Machine
- Дания : универсальные роботы
- Япония : Yamaha Motor Company
Список промышленных роботов
Промышленные роботы
- Air-Cobot, мобильный робот для совместной работы, предназначенный для осмотра внешнего вида самолета .
- Адепт Кватро, робот с четырьмя руками
- FANUC Robotics — лидер отрасли
- Кука Фамулус, первый 6-осевой робот с электромеханическим приводом (1973)
- Лемур, промышленный робот на 6 ногах
- MIP robotics Junior 300: коллаборативный четырехосевой манипулятор нового поколения
- Motoman SDA10, робот, который готовит
- Робот Delta, робот с манипулятором, состоящим из трех параллелограммов
- Робот-дельта 360 ° в версии 2D и 3D: изобретенные Питером Бамбурой в 2013 году «Робот-дельта», эти роботы предназначены для сборки мелких деталей путем копирования режима сборки оператора.

- Stäubli, Ассортимент промышленных роботов
- Unimate, то 1 — й промышленный робот
- Universal Robots, создатель первых роботов для совместной работы, предназначенных для работы вместе с операторами
Доильные роботы (сельское хозяйство)
Испытания автоматизированного доения были предприняты в 1980-х годах, в частности, Исследовательским институтом сельскохозяйственной и экологической инженерии (CEMAGREF) во Франции. Основная трудность связана с определением местоположения вымени коровы, которое сильно варьируется от одной коровы к другой, но также и для одной и той же коровы в зависимости от периода. Доильные роботы разрабатывают либо основные производители доильного оборудования, либо специализированные компании.
- Доильный робот Proflex BouMatic
- Доильный робот VMS Delaval
- Доильный робот Lely Astronaut
- Доильный робот Titan Westfalia Surge
- Доильный робот Merlin Fullwood
- Доильный робот RDS Futureline SAC Christensen, использующий промышленного робота для работы с доильными аппаратами.

Примечания и ссылки
Примечания
- ↑ От имени их конструкторов Latombe-Mazer
- ↑ Некоторые авторы также говорят о повторяемости
использованная литература
- ↑ ОЭСР, « Риски автоматизации рабочих мест значительно различаются в зависимости от региона внутри страны », на oecd.org ,(по состоянию на 12 октября 2020 г. )
- ↑ a b c d and e L’usine nouvelle, 30 июля 2014 г.
- ↑ Блог-канал, февраль 2012 г.
- ↑ World Robotics 2012 — Промышленные роботы. Краткое содержание, стр. 8-18 . Пресс-конференция IFR, Тайбэй, 30 августа. 2012, 14 с.
- ↑ BFMTV, « В Китае роботы готовы заменить людей, чтобы революционизировать экономику », на BFMTV (по состоянию на 20 августа 2018 г.
 )
) - ↑ a b c d e f g и h « Техническое руководство OSHA (OTM) | Раздел IV: Глава 4 — Промышленные роботы и безопасность робототехнических систем | Администрация по охране труда » на сайте www.osha.gov (по состоянию на 14 ноября 2020 г. ).
- ↑ a b c d and e (ru-CA) Гуарана-DIY, « Шесть основных типов промышленных роботов в 2020 году », о DIY-Robotics ,(по состоянию на 14 ноября 2020 г. )
- ↑ a и b « Промышленная робототехника: практическое руководство » на сайте www.usinenouvelle.com (по состоянию на 12 октября 2020 г. )
- ↑ « Как узнать, подходит ли робот SCARA для вашего приложения », на сайте www.
 fanuc.eu (по состоянию на 14 ноября 2020 г. )
fanuc.eu (по состоянию на 14 ноября 2020 г. ) - ↑ » Air-Cobot: новый визуальный метод контроля для самолетов «, на competitivite.gouv.fr, Les Поляки де конкурентоспособность (доступ к 29 мая 2016 )
- ↑ « Проект Air-Cobot продолжается », Air et Cosmos ,( читайте онлайн, консультация 29 мая 2016 г. )
- ↑ « Fanuc Robotics — The Industry Leader », на RobotWorx (по состоянию на 14 ноября 2020 г. )
Приложения
Статьи по Теме
- Поточная линия
- Фордизм
- Автономное программирование
- Роботмастер
- Промышленность
- Управление
- Производство
- Продуктивизм
- Робот
- Робототехника
- Тейлоризм
- Тойотизм
внешние ссылки
- История робототехники, Go Tronic
- ( fr) Промышленные роботы
- (ru) IFR — Международная федерация робототехники
- (in) Риа — Робототехника онлайн
- — Япония и Корея по-прежнему лидируют
- Антропоморфный робот FEDOR полетел в космос пресс-релизом НПО «Андроид-технологии» 22 августа 2019 года.

- [видео] Робот Алеша, «брат» Федора (позывной : МПМ-100) — Официальный видеоматериал Росатома на YouTube
<img src=»//fr.wikipedia.org/wiki/Special:CentralAutoLogin/start?type=1×1″ alt=»» title=»»>
Определение робота. Классификация роботов (Обзор Сбербанка, часть 2) — Журнал «Я Robot»
Сбербанк на форуме Skolkovo Robotics 24 апреля представил аналитический обзор мирового рынка робототехники. Обзор подготовлен Лабораторией робототехники Сбербанка. Вторая часть обзора — «Определение робота. Классификация роботов».
ОПРЕДЕЛЕНИЕ РОБОТА
Международный стандарт ISO 8373:2012 определяет робота как приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий предназначенные ему задачи.
На наш взгляд, более полезным для понимания того, что есть робот, может быть функциональное определение (определение STA, рисунок 1): роботом можно назвать любое устройство (механизм), выполняющее предназначенные ему действия, которое одновременно отвечает трем условиям.
Рисунок 1. Определение STA
- 1. SENSE: воспринимать окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электро механические сенсоры и прочее.
- 2. THINK: понимать окружающий физический мир и строить модели поведения, для того чтобы выполнять предназначенные ему действия.
- 3. ACT: воздействовать на физический мир, тем или иным способом.
ЕСЛИ ОДНО ИЗ ВЫШЕНАЗВАННЫХ УСЛОВИЙ НЕ ВЫПОЛНЯЕТСЯ, ТО УСТРОЙСТВО НЕ ЯВЛЯЕТСЯ РОБОТОМ.
К примеру, автономное транспортное средство можно отнести к робототехнике. Робот-автомобиль обладает сенсорами (SENSE), строит модели, понимает окружающий мир и принимает решения (THINK) и совершает необходимые действия, чтобы двигаться, выполняя свою задачу (ACT) (перевезти пассажиров или груз).
Такой робот работает в невероятно сложной, недетерминированной среде, в которой постоянно возникает громадное количество непредвиденных ситуаций. Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время.
Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время.
С другой стороны, устройство, которое может воспринимать окружающий мир (SENSE) и действовать (ACT), но при этом не имеет никакой модели окружающего мира, можно отнести к автоматизации. Широко распространенный пример такого устройства — кофейный автомат.
Исходя из данного определения, правильнее всего называть современную, передовую робототехнику интеллектуальной.
КЛАССИФИКАЦИЯ РОБОТОВ
Существует также принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
- 1.
 промышленная робототехника;
промышленная робототехника; - 2. сервисная робототехника.
Промышленный робот — это автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем и более осям. Он может быть либо зафиксирован в заданном месте, либо может иметь возможность передвижения для выполнения промышленных задач по автоматизации.
Если немного упростить терминологию, то промышленная робототехника — это все, что находится в производственном цеху; главным образом это различные манипуляторы. На сегодняшний день это самый распространенный вид роботов — всего в мире установлено почти два миллиона промышленных роботов.
КЛАССИФИКАЦИЯ ПРОМЫШЛЕННОЙ РОБОТОТЕХНИКИ (Рисунок 2):
ПРОМЫШЛЕННАЯ РОБОТОТЕХНИКА
- Линейные роботы
- Роботы с избирательной податливостью руки (SCARA)
- Шарнирные роботы
- Роботы с параллельным программным кодом
- Роботы, работающие в цилиндрической системе координат
- Прочие
Сервисный робот — это робот, выполняющий полезную работу для людей и оборудования, исключая промышленные задачи по автоматизации.
Аналогично, немного упрощая ситуацию, мы можем сказать, что сервисная робототехника — это все, что находится за пределами производственного цеха.
Классификация сервисных роботов основана на данном в стандарте определении, но существенно доработана Международной федерацией робототехники (International Federation of Robotics — IFR), консалтинговым агентством, которое является крупнейшим и наиболее авторитетным источником информации об отрасли.
В соответствии с этой классификацией сервисная робототехника делится на два типа:
- 1. для персонального использования. Это те роботы, которых мы приобретаем для использования в нашей повседневной жизни;
- 2. для профессионального использования. Это роботы, которые приобретаются для того, чтобы использовать их с целью извлечения выгоды при оказании различных услуг.
КЛАССИФИКАЦИЯ СЕРВИСНОЙ РОБОТОТЕХНИКИ (Рисунок 3):
СЕРВИСНАЯ РОБОТОТЕХНИКА
ПЕРСОНАЛЬНАЯ (ДОМАШНЯЯ) РОБОТОТЕХНИКА
- Роботы для домашних задач
- Развлекательные роботы
- Ассистивные роботы (для пожилых)
- Другие (личные/домашние) роботы
ПРОФЕССИОНАЛЬНЫЕ РОБОТЫ
- Полевая робототехника
- Профессиональная уборка
- Мониторинг и эксплуатация
- Строительство и снос
- Логистические системы
- Медицинская робототехника
- Спасение и обеспечение безопасности
- Военное применение
- Подводные системы (общего/гражданского назначения)
- Силовые экзоскелеты
- Мобильные платформы (общего назначения)
- Роботы для продвижения услуг (PR) и развлечения
- Другие профессиональные роботы различного назначения
Как можно видеть на рисунке 3, существует множество видов сервисных роботов. Некоторые из них очень популярны и находятся в очень хорошей степени технологической зрелости, а некоторые существуют в единичном экземпляре: в мире миллионы роботов-пылесосов и лишь один действующий робот-планетоход (Марсоход Curiosity является роботом, согласно IFR).
Некоторые из них очень популярны и находятся в очень хорошей степени технологической зрелости, а некоторые существуют в единичном экземпляре: в мире миллионы роботов-пылесосов и лишь один действующий робот-планетоход (Марсоход Curiosity является роботом, согласно IFR).
Ссылки:
ISO/TC 299 Robotics — ISO 8373:2012 Robots and robotic devices — Vocabulary, 2012
https://www.iso.org/standard/55890.html
International Federation of Robotics — “Industrial Robots — Definition and Types”, 2016
https://ifr.org/img/office/Service_Robots_2016_Chapter_1_2.pdf
С полным текстом Аналитического обзора мирового рынка робототехники можно ознакомиться на сайте Сбербанка по ссылке.
Международная федерация робототехники
Определение
Использование IFR термина « промышленный робот » основано на определении Международной организации по стандартизации: « автоматически управляемый, перепрограммируемый многоцелевой манипулятор, программируемый по трем или более осям ”, который может быть закреплен на месте или передвижен для использования в приложениях промышленной автоматизации. (ISO 8373)
(ISO 8373)
Термины, используемые в определении, означают:
- Перепрограммируемый : разработан таким образом, что запрограммированные движения или вспомогательные функции могут быть изменены без физических изменений;
- Многоцелевой : может быть адаптирован к другому применению путем физического изменения;
- Физическое изменение : изменение механической системы (механическая система не включает носители данных, ПЗУ и т. д.)
- Ось : направление, используемое для указания движения робота в линейном или вращательном режиме
Промышленные роботы могут быть классифицированы в соответствии с механической структурой:
- Декартовский робот : робот, рука которого имеет три призматических шарнира и оси которого связаны с декартовой системой координат
- Робот SCARA : робот с двумя параллельными поворотными шарнирами для обеспечения соответствия в плоскости
- Шарнирный робот : робот, рука которого имеет не менее трех вращающихся шарниров
- Параллельный/дельта-робот : робот, руки которого имеют параллельные призматические или поворотные шарниры
- Цилиндрический робот : робот, оси которого образуют цилиндрическую систему координат
Узнайте больше о различных типах роботов в файле ниже.
Роботы для сварки деталей в автомобильной промышленности © ABB
Статистика
Статистический отдел IFR собирает статистические данные о ежегодных установках многоцелевых промышленных роботов примерно в 40 странах с разбивкой по областям применения, отраслям-заказчикам, типам роботов и другим техническим и экономические аспекты.
World Robotics — Industrial Robots предоставляет глобальную статистику по промышленным роботам в стандартизированных таблицах и позволяет проводить национальные сравнения. Данные о производстве, экспорте и импорте указаны для выбранных стран. Он также предлагает плотность роботов, то есть количество роботов на 10 000 сотрудников, в качестве меры степени автоматизации.
Резюме доступно для бесплатной загрузки. Полный отчет доступен для покупки в разделе World Robotics.
Ежегодные установки промышленных роботов в ТОП-15 странах © World Robotics 2020 Report
Практические примеры и варианты использования
Значительно улучшенные характеристики роботизированных систем и повышенная простота использования открывают новые решения для автоматизации, многие из которых выходят за рамки «классических» приложений промышленных роботов. Кроме того, производители роботов и системные интеграторы все чаще поставляют гибкие рабочие ячейки со стандартной конфигурацией, которые можно быстро интегрировать в существующие производственные системы для стандартных приложений.
Кроме того, производители роботов и системные интеграторы все чаще поставляют гибкие рабочие ячейки со стандартной конфигурацией, которые можно быстро интегрировать в существующие производственные системы для стандартных приложений.
Это означает, что даже мелкосерийное производство может быть эффективно автоматизировано в таких областях, как сварка и резка деталей, гибкая сборка и упаковка, а также укладка на поддоны. Инвестиции в роботов становятся все более прибыльными и, следовательно, получают все большее распространение в промышленности.
Примеры использования промышленных роботов можно найти здесь.
Основные преимущества инвестиций в роботов
Причины, по которым компании рассматривают возможность инвестирования в робототехнические системы, сильно различаются. Некоторые факторы включают положительное влияние на качество деталей, повышение производительности производства (более быстрое время цикла) и/или доходность (меньше брака), повышение безопасности рабочих, сокращение незавершенного производства, большую гибкость производственного процесса и снижение затрат. .
.
Основные причины для автоматизации с помощью роботов © IFR
Основные причины для инвестиций в промышленных роботов:
- Повышенная гибкость для быстрой адаптации производства и реагирования на изменения спроса и меньшие размеры партий
- Повышенная устойчивость к пикам производства и системным потрясениям, таким как COVID-19
- Эффективность использования энергии и ресурсов за счет оптимизированной производительности (снижение энергопотребления, отходов материалов и увеличение выхода продукции)
- Повышение производительности и поддержка производственных работников (Повышение качества работы сотрудников, соблюдение правил охраны труда и техники безопасности)
- Снижение операционных или капитальных затрат
- Повышение качества продукции
- Увеличение объемов производства
- Экономия места в крупных производственных помещениях
В целом, роботы повышают производительность и конкурентоспособность. При эффективном использовании они позволяют компаниям стать или оставаться конкурентоспособными. Это особенно важно для предприятий малого и среднего бизнеса (МСП), которые составляют основу экономики как развитых, так и развивающихся стран. Это также позволяет крупным компаниям повысить свою конкурентоспособность за счет более быстрой разработки и поставки продукции. Более широкое использование роботов также позволяет компаниям в странах с высокими издержками «перебазировать» или возвращать на свои внутренние базовые части цепочки поставок, которые они ранее передавали на аутсорсинг источникам более дешевой рабочей силы.
При эффективном использовании они позволяют компаниям стать или оставаться конкурентоспособными. Это особенно важно для предприятий малого и среднего бизнеса (МСП), которые составляют основу экономики как развитых, так и развивающихся стран. Это также позволяет крупным компаниям повысить свою конкурентоспособность за счет более быстрой разработки и поставки продукции. Более широкое использование роботов также позволяет компаниям в странах с высокими издержками «перебазировать» или возвращать на свои внутренние базовые части цепочки поставок, которые они ранее передавали на аутсорсинг источникам более дешевой рабочей силы.
Коллаборативные роботы
Коллаборативные промышленные роботы предназначены для выполнения задач совместно с рабочими в промышленных секторах. Международная федерация робототехники определяет два типа роботов, предназначенных для совместного использования. Одна группа охватывает роботов, предназначенных для совместного использования, которые соответствуют норме 10218-1 Международной организации по стандартизации, в которой указаны требования и рекомендации в отношении конструкции, обеспечивающей безопасность, защитных мер и информации по использованию промышленных роботов. Другая группа охватывает роботов, предназначенных для совместного использования, которые не удовлетворяют требованиям ISO 10218-1. Это не означает, что эти роботы небезопасны. Они могут соответствовать различным стандартам безопасности, например, национальным или внутренним стандартам.
Другая группа охватывает роботов, предназначенных для совместного использования, которые не удовлетворяют требованиям ISO 10218-1. Это не означает, что эти роботы небезопасны. Они могут соответствовать различным стандартам безопасности, например, национальным или внутренним стандартам.
Существуют значительные различия в типах коллаборативных роботов, отвечающих вышеуказанным спецификациям, и уровне контакта между роботом и работником в коллаборативных приложениях. На одном конце технического спектра находятся традиционные промышленные роботы, работающие в отдельном рабочем пространстве, в которое рабочие могут периодически входить, не отключая питание робота и заранее не защищая производственную ячейку — трудоемкая процедура, которая может стоить тысячи долларов в минуту. простоя машины. Рабочее пространство робота может быть оснащено датчиками, которые обнаруживают движение человека и обеспечивают работу робота на очень низкой скорости или остановку, когда работник находится в пределах отведенного рабочего пространства. На другом конце спектра находятся промышленные роботы, специально предназначенные для совместной работы с людьми в общем рабочем пространстве. Часто называемые «коботами», эти роботы имеют множество технических характеристик, которые гарантируют, что они не причинят вреда, когда рабочий вступает в прямой контакт, преднамеренно или случайно. Эти функции включают в себя легкие материалы, закругленные контуры, набивку, «кожу» (набивку со встроенными датчиками) и датчики на основании или суставах робота, которые измеряют и контролируют силу и скорость и гарантируют, что они не превышают определенные пороговые значения в случае контакта.
На другом конце спектра находятся промышленные роботы, специально предназначенные для совместной работы с людьми в общем рабочем пространстве. Часто называемые «коботами», эти роботы имеют множество технических характеристик, которые гарантируют, что они не причинят вреда, когда рабочий вступает в прямой контакт, преднамеренно или случайно. Эти функции включают в себя легкие материалы, закругленные контуры, набивку, «кожу» (набивку со встроенными датчиками) и датчики на основании или суставах робота, которые измеряют и контролируют силу и скорость и гарантируют, что они не превышают определенные пороговые значения в случае контакта.
Типы сотрудничества человека и промышленных роботов
Рынок для совместных роботов все еще находится в зачаточном состоянии. Конечные пользователи и системные интеграторы все еще набираются опыта в отношении того, что работает, а что нет при разработке и реализации приложений для совместной работы. Технологические разработки в области датчиков и захватов обещают расширить диапазон действий, которые может выполнять исполнительный орган робота. Интерфейсы программирования будут становиться все более интуитивно понятными не только для коботов, но и для традиционных промышленных роботов.
Интерфейсы программирования будут становиться все более интуитивно понятными не только для коботов, но и для традиционных промышленных роботов.
В 2019 году около 4,8% (18 000 из более чем 373 000) установленных промышленных роботов были коботами, что на 11% больше, чем в 2018 году.
Коллаборативные и традиционные промышленные роботы © IFR Международная федерация робототехники
к позиционному документу IFR по Демистификация коллаборативных роботов и кейс-стади.
Роботы и ИИ
Искусственный интеллект в роботах дает компаниям новые возможности повысить производительность, сделать работу более безопасной и сэкономить ценное время людей. Существенные исследования посвящены использованию ИИ для расширения функциональности роботов. Коммерчески доступные приложения включают использование ИИ для:
- Позволяет роботам ощущать окружающую среду и реагировать на нее: это значительно расширяет спектр функций, которые могут выполнять роботы.
- Оптимизируйте производительность роботов и процессов, экономя деньги компаний.

- Позволяет роботам функционировать в качестве мобильных интерактивных информационных систем в самых разных условиях, от общественных мест до больниц и торговых точек, экономя время людей.
Для получения дополнительной информации см. информационный бюллетень IFR для СМИ по теме «Искусственный интеллект в робототехнике» .
Интеллектуальные подключенные роботы преобразуют производство
IFR определила пять распространенных сценариев, в которых роботы подключаются в рамках более широких стратегий автоматизации:
- Автоматизированное производство:
Последующие процессы, такие как заказ деталей и составление расписания машин, позволяют производителям сразу понять, какие ресурсы необходимы для производства нового продукта или заказа, и лучше оптимизировать организацию производства. - Оптимизация производительности:
Подключение роботов и других машин к центральному вычислительному серверу позволяет производителям извлекать и агрегировать данные, которые можно использовать для оптимизации производительности машин в режиме реального времени или ретроспективно, избегая незапланированных простоев машин, которые могут стоить производителям более 1 миллиона долларов. в час.
в час. - Цифровые двойники:
Виртуальные представления роботов и других производственных машин позволяют производителям моделировать операции и влияние изменений параметров и программ до их внедрения, что позволяет улучшить планирование производства и избежать дорогостоящих простоев. - Роботы как услуга:
Внедрение роботов на основе оплаты по мере использования может быть особенно выгодно для малых и средних производителей, избавляя их от первоначальных капиталовложений и непредсказуемых затрат на техническое обслуживание, а также обеспечивая предсказуемость их работы. расходы. - Sense and Respond:
Датчики и системы технического зрения позволяют роботам реагировать на внешнюю среду в режиме реального времени, расширяя спектр задач, которые может выполнять робот, например, сбор и размещение несортированных деталей, а также повышая мобильность робота. Мобильные роботы играют ключевую роль в обеспечении гибкого производства, в котором производство разделено на отдельные процессы и производственные ячейки, работающие параллельно.
Как интеллектуальные подключенные роботы меняют производство © IFR
Для получения дополнительной информации см. информационный документ IFR Как подключенные роботы меняют производство .
- WR Industrial Robots 2019 — Sources & Methods (3.0 MB )
Твиттер
Фейсбук
LinkedIn
Что такое промышленная автоматизация и робототехника?
Промышленная автоматизация и робототехника — это использование компьютеров, систем управления и информационных технологий для управления промышленными процессами и машинами, заменяющих ручной труд и повышающих эффективность, скорость, качество и производительность.
Автоматизированные промышленные приложения варьируются от сборочных линий производственных процессов до хирургии и космических исследований. Ранние автоматизированные системы были ориентированы на повышение производительности (поскольку этим системам не нужно отдыхать, как людям), но теперь этот акцент смещается на повышение качества и гибкости производства и многое другое. Современные автоматизированные системы выходят за рамки механизации с добавлением искусственного и машинного обучения.
Современные автоматизированные системы выходят за рамки механизации с добавлением искусственного и машинного обучения.
Однако автоматизация и робототехника — это не одно и то же:
Автоматизация — это использование компьютерного программного обеспечения, машин или других технологий для выполнения задач, которые в противном случае выполнял бы человек. Существует несколько видов автоматизации, которые могут включать в себя как виртуальные, так и физические задачи.
1. Программная автоматизация
Это автоматизация задач, обычно выполняемых людьми с помощью компьютерных программ. Эта область включает в себя автоматизацию бизнес-процессов (BPA) с использованием программного обеспечения для формализации и оптимизации бизнес-процессов, роботизированную автоматизацию процессов (RPA), которая использует «программных роботов» для имитации людей, использующих компьютерные программы, и интеллектуальную автоматизацию процессов (IPA), которая включает в себя использование искусственного интеллекта, чтобы узнать, как люди выполняют задачи с помощью компьютерной программы. Разница между BPA и RPA невелика: BPA похож на замену человеческой производственной линии автономной фабрикой, а RPA — на добавление робота для совместной работы, который будет работать вместе с существующей рабочей силой.
Разница между BPA и RPA невелика: BPA похож на замену человеческой производственной линии автономной фабрикой, а RPA — на добавление робота для совместной работы, который будет работать вместе с существующей рабочей силой.
2. Промышленная автоматизация
Это управление физическими процессами с помощью машин и систем управления для автоматизации производственных процессов. В этом типе физической автоматизации используются роботы, а также другие нероботизированные машины, такие как станки с ЧПУ.
Эта область инженерии использует несколько дисциплин для проектирования, создания, программирования и использования роботов. Роботы — это программируемые машины, которые используют датчики и приводы для взаимодействия с физическим миром и выполнения действий автономно или полуавтономно. Поскольку их можно перепрограммировать, роботы более гибкие, чем однофункциональные машины. Коллаборативные роботы предназначены для выполнения задач так же, как люди, в то время как традиционные промышленные роботы, как правило, выполняют задачи более эффективно, чем люди.
У автоматизации и робототехники есть области, в которых они пересекаются, например, использование роботов для автоматизации физических задач, например, на линиях сборки автомобилей. Однако не вся автоматизация использует физических роботов и не все области робототехники связаны с автоматизацией.
Ранней формой промышленной автоматизации было использование станков с числовым программным управлением (ЧПУ) для высокоточного аэрокосмического производства в Соединенных Штатах во время Второй мировой войны. Используя первые промышленные вычислительные системы, первые станки с ЧПУ все еще требовали высокого уровня человеческого участия, пока они не стали более автоматизированными в 19 веке.50-е годы.
Современная промышленная автоматизация включает использование систем сбора данных, распределенных систем управления, диспетчерского управления и программируемых логистических контроллеров. Они постоянны и предсказуемы, что делает их идеальными для обработки химикатов, целлюлозы, бумаги, нефти и газа или другого сырья. Добавляя к этим системам возможности Индустрии 4.0, промышленная автоматизация также может включать доступ к периферийным данным для дальнейшей оптимизации операций на основе данных в реальном времени.
Добавляя к этим системам возможности Индустрии 4.0, промышленная автоматизация также может включать доступ к периферийным данным для дальнейшей оптимизации операций на основе данных в реальном времени.
Рост промышленной автоматизации и робототехники пришелся на 19Механизированная промышленность -го века -го века, в которой люди должны были управлять все более сложным оборудованием для обеспечения более высокой производительности. По мере развития механизации операторы машин становились все более второстепенными в работе, и это понятие получило дальнейшее развитие с промышленной автоматизацией.
Промышленная автоматизация требовала еще меньшего участия человека для выполнения основных и повторяющихся задач, что привело к сокращению некоторых рабочих мест, но также создало новые возможности, связанные с самой автоматизацией. Это сместило роли в сторону экономики белых воротничков, поскольку такие страны, как Япония, достигли высоко роботизированного производства электроники и автомобилей к 1919 году. 80-е годы.
80-е годы.
Этот параллельный рост промышленной автоматизации и робототехники продолжился с появлением искусственного интеллекта, машинного обучения и роботизированного зрения. Сегодня можно автоматизировать не только производство, но и программирование и организацию процессов, что позволяет людям сосредоточиться на добавлении ценности за счет улучшения конструкции продукта.
Роботы могут использоваться в физической промышленной автоматизации, но не требуются для виртуальных задач и программных приложений.
Промышленная автоматизация, с роботами или без них, предлагает ряд преимуществ:
1. Снижение эксплуатационных расходов
Отсутствие необходимости в медицинском обслуживании, оплачиваемом отпуске, пенсионных выплатах или других пособиях персоналу и без выплаты заработной платы промышленная автоматизация, как правило, дешевле, чем нанимать людей. Хотя могут быть затраты на техническое обслуживание, при правильном управлении они должны быть намного меньше, чем затраты на персонал для того же результата или лучше.
2. Повышенная производительность
Промышленная автоматизация позволяет предприятиям работать 24 часа в сутки, 7 дней в неделю без потери времени на передачу персонала или отпуск, повышая производительность предприятия.
3. Улучшенное качество
Промышленная автоматизация отличается высокой повторяемостью без ошибок, связанных с человеческим персоналом. Техника также не будет уставать, что может повлиять на качество и производительность в определенное время смены.
4. Высокая гибкость
Автоматизированная система, включая роботов, может быть запрограммирована на выполнение другой задачи, обеспечивая большую гибкость, чем люди, которым может потребоваться обучение для выполнения другой задачи.
5. Повышение точности и сбора данных
Автоматизированный сбор данных не только более надежен, но и позволяет повысить точность данных, предоставляя необходимые факты для принятия решений по сокращению отходов и улучшению процессов.
6. Повышенная безопасность
Использование роботов для опасных ролей или условий повысит безопасность на вашем предприятии по сравнению с использованием сотрудников-людей.
Промышленная автоматизация позволяет выполнять больше работы, дешевле и эффективнее, чем с людьми. Это также означает, что вам не нужно искать квалифицированную рабочую силу там, где вместо нее можно было бы использовать робота.
Основным недостатком промышленной автоматизации являются высокие затраты, связанные с переключением с человека на автоматическую производственную линию. Существуют также последующие расходы, связанные с переподготовкой или наймом персонала для работы со сложным оборудованием.
Услуги, связанные с промышленной автоматизацией и робототехникой, уже оцениваются в миллиарды долларов в год и будут расти по мере развития технологий.
Поскольку производство роботов увеличилось, связанные с этим затраты снизились, и эта тенденция должна сохраниться, поскольку все больше стран с развивающейся экономикой начинают рассматривать робототехнику как решение. В результате увеличения производства роботов также увеличилась доступность необходимых навыков для их проектирования, установки, эксплуатации и обслуживания. Кроме того, повышенная доступность программного обеспечения сократила связанные с этим время и риски проектирования, в то же время сделав программирование роботов намного проще и дешевле.
В результате увеличения производства роботов также увеличилась доступность необходимых навыков для их проектирования, установки, эксплуатации и обслуживания. Кроме того, повышенная доступность программного обеспечения сократила связанные с этим время и риски проектирования, в то же время сделав программирование роботов намного проще и дешевле.
Поскольку технологии продолжают развиваться, эти тенденции должны сохраниться и в будущем с роботизированными системами, способными собирать данные, отслеживать процессы и устранять любые проблемы. Роботы уже могут использовать датчики и другие точки данных для мониторинга и адаптации своих движений в режиме реального времени, имитируя навыки человека-ремесленника для улучшения процесса и снижения требований к доработке или проверке.
Хотя роботы по-прежнему будут использоваться для автоматизации повторяющихся физических задач, новые технологии могут позволить роботам реагировать на голосовые команды, поскольку искусственный интеллект позволяет им справляться с более широким кругом задач и адаптироваться к изменениям в рабочей среде. Это приведет к тому, что роботы будут использоваться в таких областях, как сельское хозяйство, где автоматизированным системам сложно найти, оценить и собрать урожай. Роботизированная точность — еще одна область, в которой в будущем должны быть достигнуты успехи, поскольку она позволяет выполнять более сложные задачи с улучшенной координацией.
Это приведет к тому, что роботы будут использоваться в таких областях, как сельское хозяйство, где автоматизированным системам сложно найти, оценить и собрать урожай. Роботизированная точность — еще одна область, в которой в будущем должны быть достигнуты успехи, поскольку она позволяет выполнять более сложные задачи с улучшенной координацией.
По мере развития роботов можно будет решать, какие задачи должны быть автоматизированы, а какие должны выполняться людьми, а благодаря передовым системам безопасности роботы также будут чаще использоваться для работы вместе с людьми, не подвергая их потенциальной опасности.
В настоящее время автоматизированные системы совершенствуются, чтобы иметь возможность контролировать и автоматически регулировать скорость целых производственных линий, чтобы максимизировать производительность и минимизировать затраты.
Со всеми этими достижениями стратегия автоматизации будет зависеть от успешного решения, какие области автоматизировать и на каком уровне.
Что такое промышленная автоматизация?
Промышленная автоматизация — это использование информационных технологий и систем управления, таких как компьютеры и роботы, для управления машинами и физическими или виртуальными процессами вместо того, чтобы полагаться на людей. Промышленная автоматизация — это шаг вперед по сравнению с механизацией как частью производственных процессов.
Что означает промышленная робототехника?
Промышленная робототехника — это использование робота для производства или других промышленных процессов, включая сборку, упаковку, маркировку, покраску, проверку, испытания, сварку и т. д. Использование роботов для этих задач должно обеспечивать высокую выносливость, точность и скорость выполнения задач.
В чем разница между робототехникой и автоматизацией?
Хотя иногда они взаимозаменяемы, робототехника и автоматизация — разные вещи. Автоматизация — это процесс использования технологий для выполнения задач, которые в противном случае выполнялись бы людьми. Эти задачи могут быть как физическими, так и виртуальными, и для их выполнения могут использоваться роботы. Робототехника — это процесс разработки и использования роботов (конкретно) для определенной функции, которая может или не может быть автоматизирована.
Эти задачи могут быть как физическими, так и виртуальными, и для их выполнения могут использоваться роботы. Робототехника — это процесс разработки и использования роботов (конкретно) для определенной функции, которая может или не может быть автоматизирована.
Хотя промышленная автоматизация и робототехника не одно и то же, они часто идут рука об руку для повышения производительности, качества и безопасности при низких затратах в различных отраслях промышленности.
Использование автоматизированной робототехники в таких приложениях, как производственные линии и прецизионная хирургия, продолжает развиваться вместе с ростом возможностей подключения к Интернету вещей (IoT), поскольку все больше предприятий изучают преимущества Индустрии 4.0.
Однако, как роботы не нуждаются в автоматизации, так и промышленная автоматизация зависит не только от физических роботов. Промышленная автоматизация охватывает любой аспект операции, который может быть выполнен машиной, а не человеком, а это означает, что в автоматизации также есть много виртуальных аспектов.
Всего комментариев: 0