Система координат c: Типы систем координат — Windows Forms .NET Framework
Содержание
8. Системы координат — документация QGIS Documentation
Цель: | Ознакомиться с системами координат. | |
Основные понятия: | Система координат (CRS), проекция карты, перепроецирование «на лету», широта, долгота |
8.1. Обзор
Map projections try to portray the surface of the earth, or a portion of the
earth, on a flat piece of paper or computer screen. In layman’s term, map projections
try to transform the earth from its spherical shape (3D) to a planar shape (2D).
A coordinate reference system (CRS) then defines how the two-dimensional,
projected map in your GIS relates to real places on the earth.
The decision of which map projection and CRS to use depends on
the regional extent of the area you want to work in, on the analysis you want to
do, and often on the availability of data.
8.2. Подробнее о проекциях
Традиционным способом отображения формы Земли являются глобусы. Однако использование этого подхода имеет свои недостатки. Хотя глобусы по большому счету сохраняют форму Земли и иллюстрируют пространственную конфигурацию объектов размером с континент, их весьма проблематично носить в кармане. Кроме того, они удобны в использовании исключительно при малых масштабах (например 1:100 миллионам).
Большинство тематических карт, используемых в ГИС-приложениях, имеют гораздо больший масштаб. Обычно, наборы ГИС-данных имеют масштаб 1:250 000 или больше, в зависимости от уровня детализации. Глобус таких размеров будет дорогим и его использование будет очень сложным. Поэтому картографы разработали набор приемов, называемых проекциями карты, предназначенный для отображения сферической поверности Земли в двумерном пространстве с достаточной точностью.
Если рассматривать Землю вблизи, её можно считать плоской. Однако, при взгляде из космоса видно, что её форма приближена к сферической.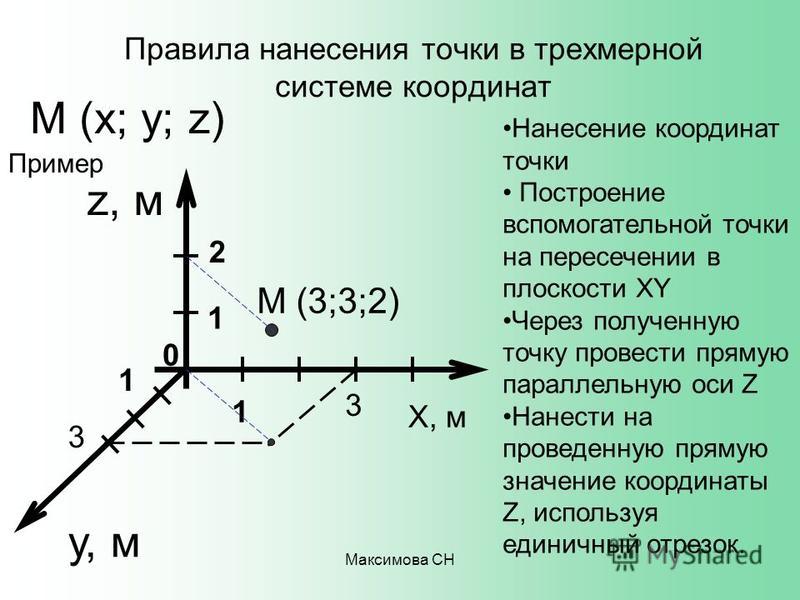 Карты, как будет показано в следующем разделе, отражают реальность. На них показаны не только объекты, но и их форма и пространственное расположение. Каждая проекция имеет достоинства и недостатки. Выбор наилучшей проекции для карты определяется её масштабом и назначением. Например, проекция может давать неприемлемые искажения в случае отображения всего африканского континента, но идеально подходить для создания крупномасштабной (подробной) карты страны. Свойства проекций также могут влиять на визуальные параметры карты. Так, некоторые проекции хорошо подходят для маленьких областей, другие хороши для отображения объектов, протяженных с запада на восток, третьи — для объектов вытянутых с севера на юг.
Карты, как будет показано в следующем разделе, отражают реальность. На них показаны не только объекты, но и их форма и пространственное расположение. Каждая проекция имеет достоинства и недостатки. Выбор наилучшей проекции для карты определяется её масштабом и назначением. Например, проекция может давать неприемлемые искажения в случае отображения всего африканского континента, но идеально подходить для создания крупномасштабной (подробной) карты страны. Свойства проекций также могут влиять на визуальные параметры карты. Так, некоторые проекции хорошо подходят для маленьких областей, другие хороши для отображения объектов, протяженных с запада на восток, третьи — для объектов вытянутых с севера на юг.
8.3. Три типа картографических проекций
The process of creating map projections is best illustrated by positioning a light
source inside a transparent globe on which opaque earth features are placed. Then
project the feature outlines onto a two-dimensional flat piece of paper.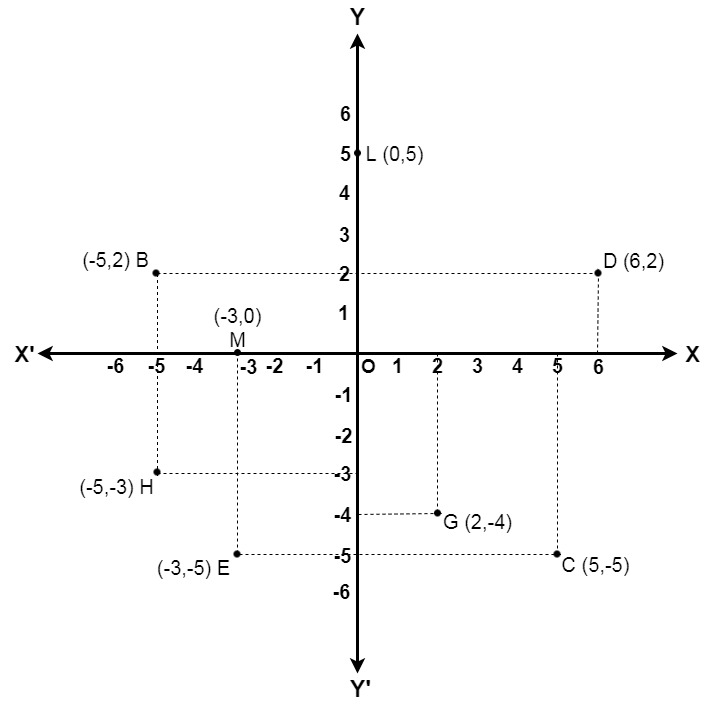
Different ways of projecting can be produced by surrounding the globe in a
cylindrical fashion, as a cone, or even as a flat surface. Each of
these methods produces what is called a map projection family. Therefore,
there is a family of planar projections, a family of cylindrical
projections, and another called conical projections (see
Рис. 8.3)
Рис. 8.3 Три типа картографических проекций: a) цилиндрические, b) конические, c) азимутальные.
В настоящее время процесс проецирования сферической Земли на бумагу выполняется с использованием математических преобразований и тригонометрии. Но в основе лежит все то же пропускание луча света через глобус.
8.4. Точность картографических проекций
Map projections are never absolutely accurate representations of the spherical
earth. As a result of the map projection process, every map shows distortions
of angular conformity, distance and area.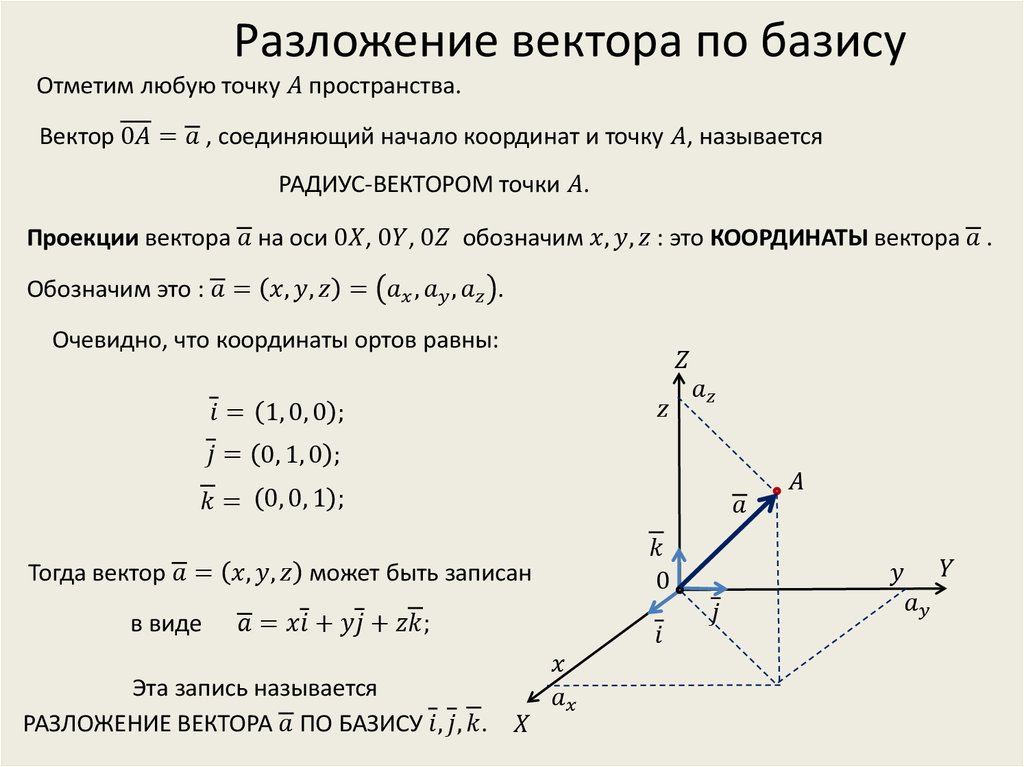 A map projection may combine several
A map projection may combine several
of these characteristics, or may be a compromise that distorts all the properties
of area, distance and angular conformity, within some acceptable limit. Examples
of compromise projections are the Winkel Tripel projection and the Robinson
projection (see Рис. 8.4), which are often used for producing
and visualizing world maps.
Рис. 8.4 Проекция Робинсона дает приемлемые искажения площади, расстояний и углов.
В большинстве случаев сохранить все характеристики исходных объектов при проецировании невозможно. Это значит, что когда вам требуется выполнить анализ, необходимо подбирать такую проекцию, которая даст наилучшие характеристики для анализа. Например, если требуется измерить расстояния, необходимо выбрать проекцию, которая обеспечит точные расстояния.
8.4.1. Равноугольные проекции
Когда мы работаем с глобусом, основные направления компаса (север, восток, юг и запад) всегда расположены под углом в 90 градусов друг к другу. Другими словами восток всегда будет находиться на 90 градусов от севера. Проекция может сохранять угловые направления, и такая проекция называется конморфной или равноугольной.
Другими словами восток всегда будет находиться на 90 градусов от севера. Проекция может сохранять угловые направления, и такая проекция называется конморфной или равноугольной.
These projections are used when the preservation of angular relationships is
important. They are commonly used for navigational or meteorological tasks. It
is important to remember that maintaining true angles on a map is difficult for
large areas and should be attempted only for small portions of the earth. The
conformal type of projection results in distortions of areas, meaning that if
area measurements are made on the map, they will be incorrect. The larger the
area the less accurate the area measurements will be. Examples are the Mercator
projection (as shown in Рис. 8.5) and the Lambert Conformal
Conic projection. The U.S. Geological Survey uses a conformal projection for
many of its topographic maps.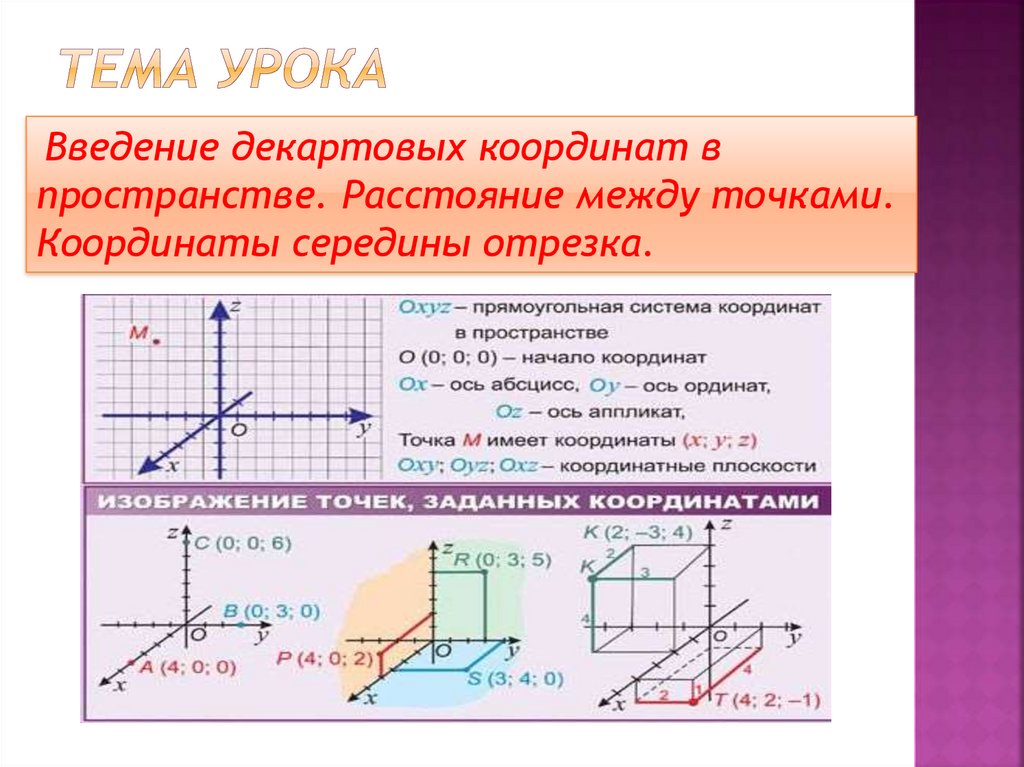
Рис. 8.5 Проекция Меркатора используется в тех случаях, когда важна правильность углов и допустимы искажения площади.
8.4.2. Равнопромежуточные проекции
If your goal in projecting a map is to accurately measure distances, you should
select a projection that is designed to preserve distances well. Such projections,
called equidistant projections, require that the scale of the map is
kept constant. A map is equidistant when it correctly represents distances
from the centre of the projection to any other place on the map. Equidistant
projections maintain accurate distances from the centre of the projection or
along given lines. These projections are used for radio and seismic mapping, and
for navigation. The Plate Carree Equidistant Cylindrical (see
Рис. 8.6) and the Equirectangular projection are two
good examples of equidistant projections. The Azimuthal Equidistant projection
is the projection used for the emblem of the United Nations (see
Рис.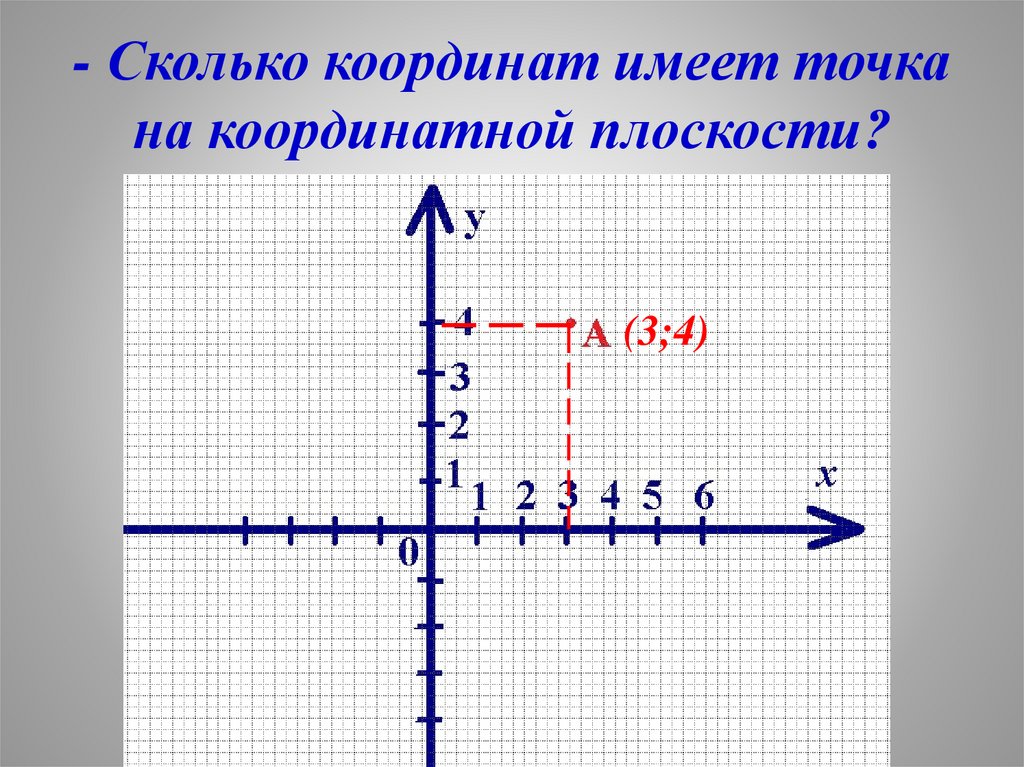 8.7).
8.7).
Рис. 8.6 Равнопромежуточная цилиндрическая проекция Плате-Карре используется, когда необходимо получить точные расстояния.
Рис. 8.7 Логотип ООН использует азимутальную равнопромежуточную проекцию.
8.4.3. Равновеликие проекции
When a map portrays areas over the entire map, so that all mapped areas have the
same proportional relationship to the areas on the Earth that they represent, the
map is an equal area map. In practice, general reference and educational maps
most often require the use of equal area projections. As the name implies,
these maps are best used when calculations of area are the dominant calculations
you will perform. If, for example, you are trying to analyse a particular area
in your town to find out whether it is large enough for a new shopping mall,
equal area projections are the best choice. On the one hand, the larger the area
you are analysing, the more precise your area measures will be, if you use an
equal area projection rather than another type. On the other hand, an equal area
On the other hand, an equal area
projection results in distortions of angular conformity when dealing with
large areas. Small areas will be far less prone to having their angles distorted
when you use an equal area projection. Alber’s equal area, Lambert’s equal
area and Mollweide Equal Area Cylindrical projections (shown in
Рис. 8.8) are types of equal area projections that
are often encountered in GIS work.
Рис. 8.8 Равновеликая псевдоцилиндрическая проекция Мольвейде, например, гарантирует, что площади всех отображаемых объектов на карте — пропорциональны площадям объектов на поверхности Земли.
Имейте в виду, что картографическая проекция — очень сложная тема. Существуют сотни различных проекций, каждая из которых пытается отобразить на плоском листе бумаги определённую часть поверхности Земли как можно достовернее. На самом деле, выбор используемой проекции — ваш выбор. Многие государства имеют наиболее часто используемые проекции и при обмене данными специалисты следуют государственному тренду.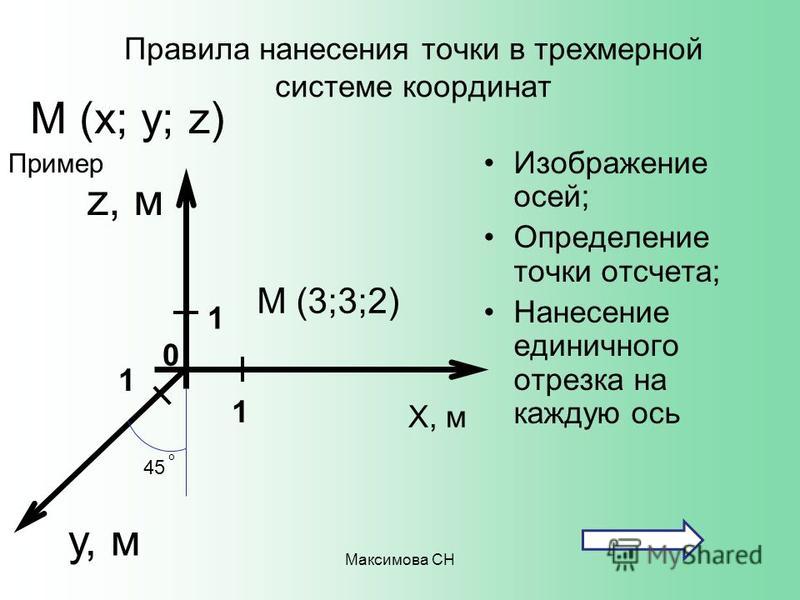
8.5. Подробнее о системах координат
С помощью систем координат каждая точка на поверхности Земли может быть представлена набором из трёх чисел, называемых координатами. В целом, системы координат делятся на системы координат проекций (также называемых Декартовыми или прямоугольными системами координат) и географические системы координат.
8.5.1. Географические системы координат
Использование географических систем координат очень распространено. Для описания положения на поверхности Земли они используют градусы широты и долготы и, иногда, значение высоты. Наиболее популярная называется WGS 84.
Lines of latitude run parallel to the equator and divide the earth into 180
equally spaced sections from North to South (or South to North). The reference
line for latitude is the equator and each hemisphere is divided into ninety
sections, each representing one degree of latitude.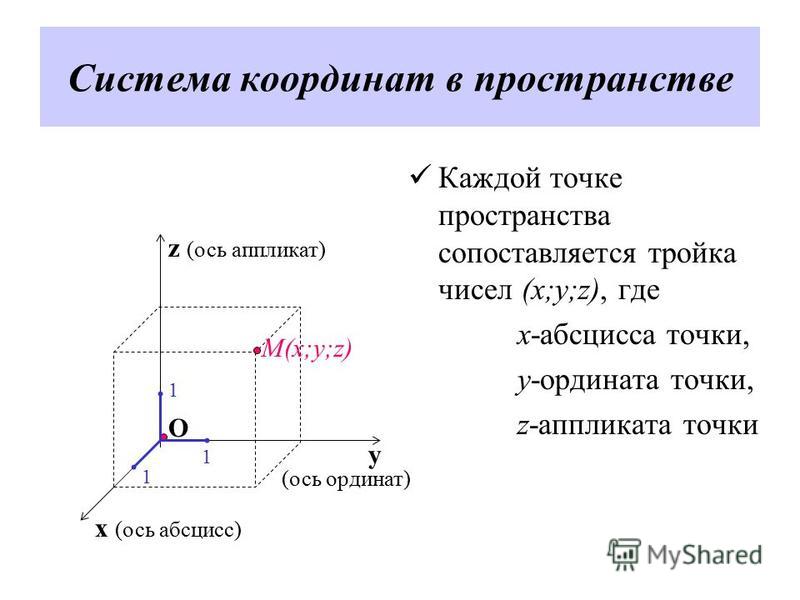 In the northern hemisphere,
In the northern hemisphere,
degrees of latitude are measured from zero at the equator to ninety at the north
pole. In the southern hemisphere, degrees of latitude are measured from zero at
the equator to ninety degrees at the south pole. To simplify the digitisation of
maps, degrees of latitude in the southern hemisphere are often assigned negative
values (0 to -90°). Wherever you are on the earth’s surface, the distance between
the lines of latitude is the same (60 nautical miles). See Рис. 8.9
for a pictorial view.
Рис. 8.9 Географическая система координат с параллелями (линии, параллельные экватору) и меридианами с центральным меридианом в Гринвиче.
Lines of longitude, on the other hand, do not stand up so well to the
standard of uniformity. Lines of longitude run perpendicular to the equator and
converge at the poles. The reference line for longitude (the prime meridian) runs
from the North pole to the South pole through Greenwich, England. Subsequent
lines of longitude are measured from zero to 180 degrees East or West of the prime
meridian.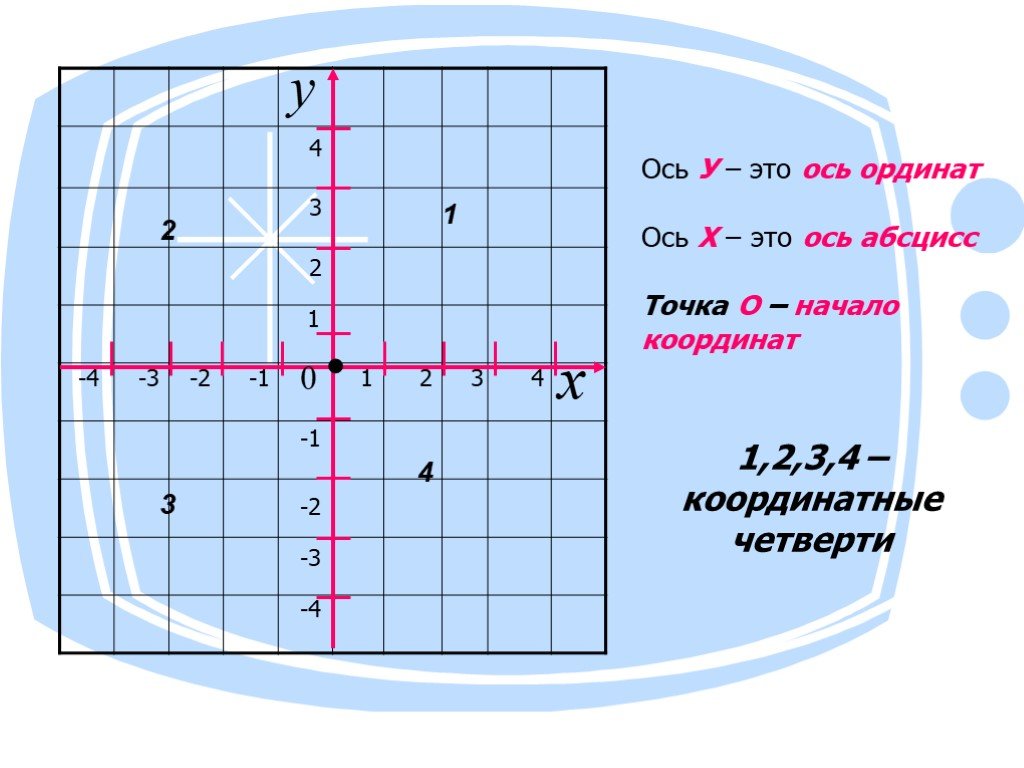 Note that values West of the prime meridian are assigned negative values
Note that values West of the prime meridian are assigned negative values
for use in digital mapping applications. See Рис. 8.9 for a pictorial
view.
На экваторе, и только на экваторе, длина дуги в 1 градус меридиана и длина дуги в 1 градус параллели — равны. При движении по направлению к полюсам, расстояние между меридианами постоянно уменьшается, пока, точно на полюсе, все 360° долготы не сойдутся в одной точке — вы даже сможете пальцем прикоснуться к ней (хотя, вероятно, захотите одеть перчатки). Используя географическую систему координат, мы получаем сетку, делящую поверхность Земли на четырёхугольники площадью примерно 12363.365 кв. километров на экваторе, которые практически бесполезны для определения местоположения чего-либо в пределах этого многоугольника.
Чтобы быть по-настоящему полезной, сетка параллелей и меридианов на карте должна быть поделена на достаточно маленькие отрезки, которые можно было бы использовать (с достаточной степенью точности) для описания расположения точки на карте.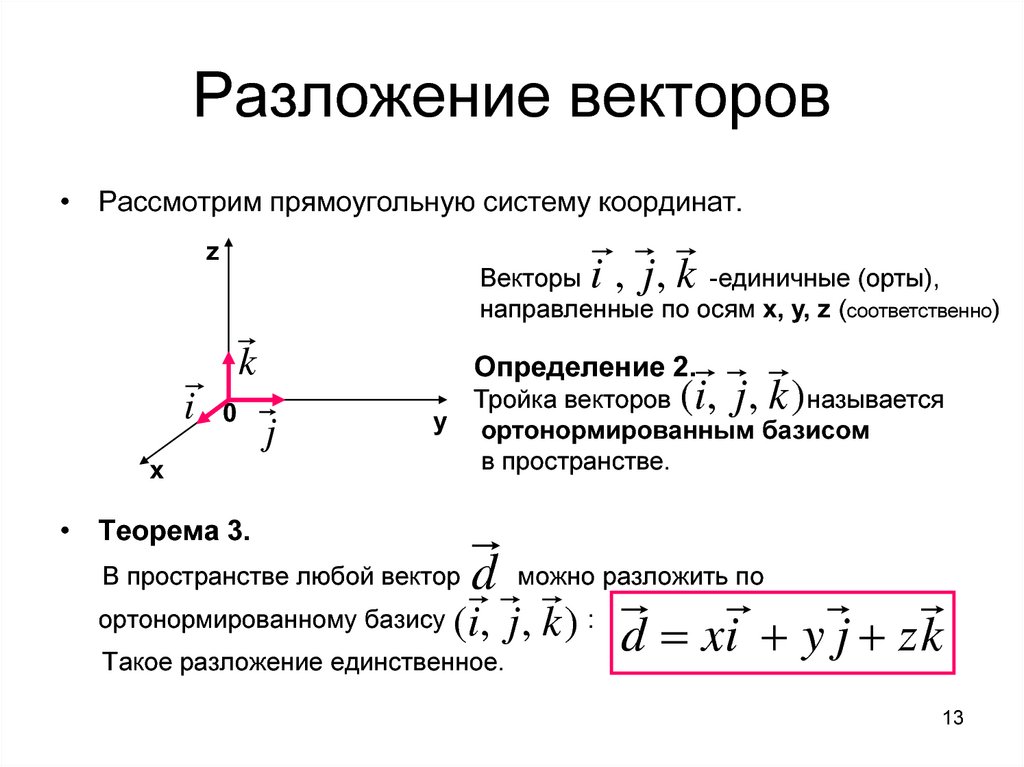 Для достижения этой цели, градусы делятся на минуты (
Для достижения этой цели, градусы делятся на минуты (') и секунды ("). В одном градусе 60 минут, а в минуте 60 секунд (3600 секунд в градусе). Так, на экваторе, одна секунда параллели или меридиана равна 30.87624 метров.
8.5.2. Системы координат проекций (прямоугольные)
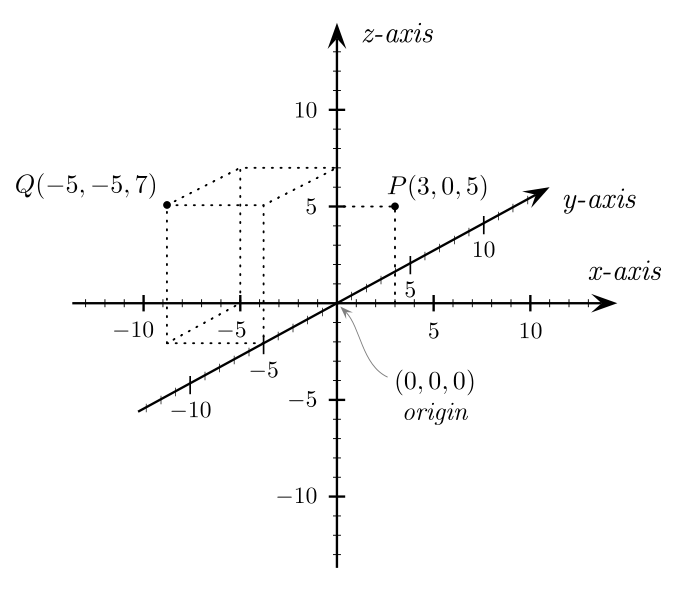
A two-dimensional coordinate reference system is commonly defined by two axes.
At right angles to each other, they form a so called XY-plane (see
Рис. 8.10 on the left side). The horizontal axis is normally labelled
X, and the vertical axis is normally labelled Y. In a three-dimensional
coordinate reference system, another axis, normally labelled Z, is added. It
is also at right angles to the X and Y axes. The Z axis provides the
third dimension of space (see Рис. 8.10 on the right side). Every
point that is expressed in spherical coordinates can be expressed as an X Y Z
coordinate.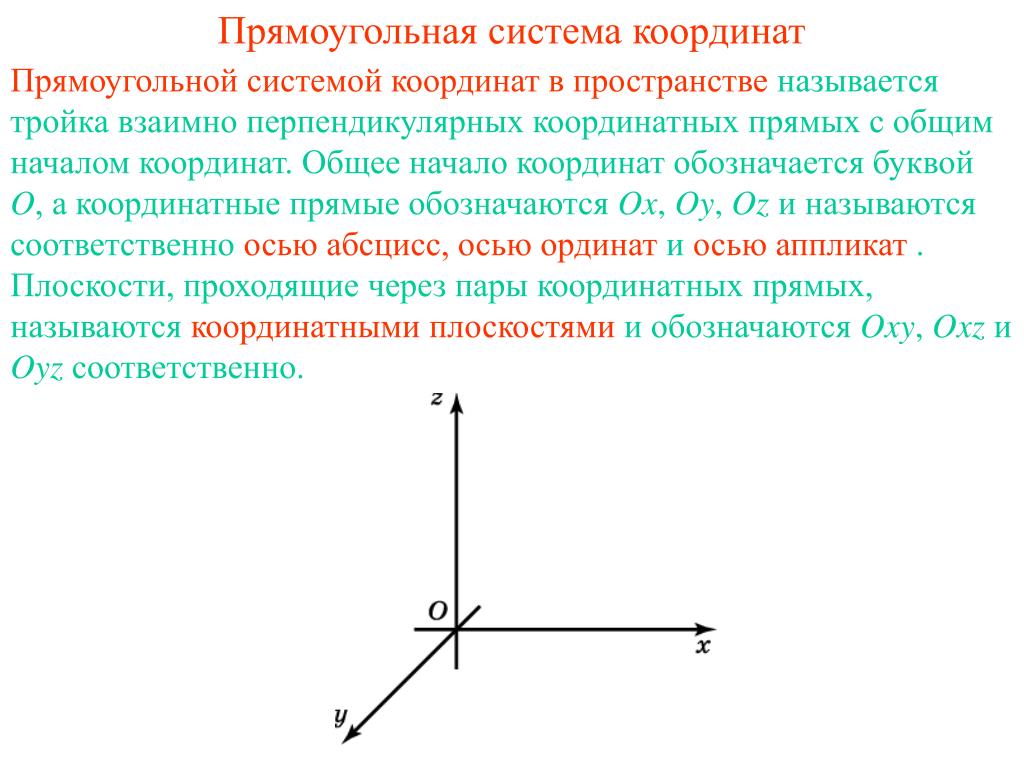
Рис. 8.10 Двух и трёхмерные системы координат.
Системы координат проекций в южном полушарии (к югу от экватора) берут начало от экватора и начального меридиана. Это значит, что значения по оси Y увеличиваются к югу, а значения по оси X увеличиваются на Запад. В северном полушарии (к северу от экватора) началом служат также экватор и начальный меридиан. Однако, теперь значения по оси Y увеличиваются на Север, а значения по оси X увеличиваются на Восток. Далее будет описана часто используемая система координат, называемая Универсальная поперечная проекция Меркатора (Universal Transverse Mercator, UTM).
8.6. Универсальная поперечная проекция Меркатора (UTM)
The Universal Transverse Mercator (UTM) coordinate reference system has its origin
on the equator at a specific Longitude. Now the Y-values increase
southwards and the X-values increase to the West. The UTM CRS is a global map
projection.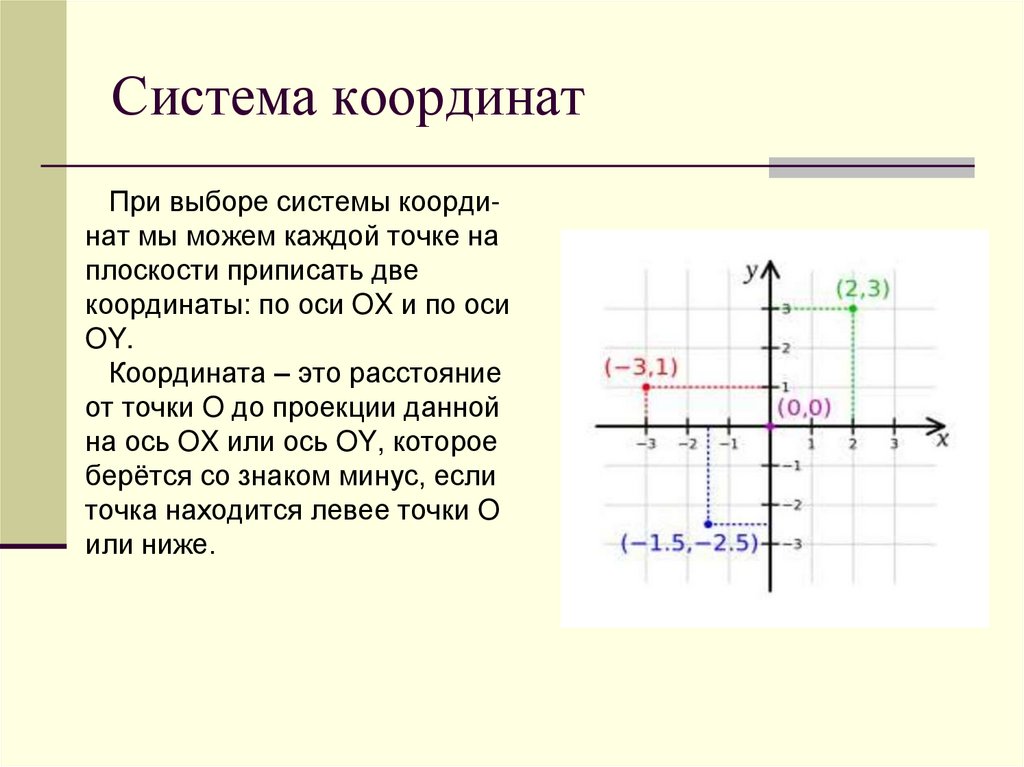 This means, it is generally used all over the world. But as already
This means, it is generally used all over the world. But as already
described in the section „accuracy of map projections“ above, the larger the area
(for example South Africa) the more distortion of angular conformity, distance
and area occur. To avoid too much distortion, the world is divided into 60 equal
zones that are all 6 degrees wide in longitude from East to West. The UTM
zones are numbered 1 to 60, starting at the antimeridian
(zone 1 at 180 degrees West longitude) and progressing East back to the
antemeridian (zone 60 at 180 degrees East longitude) as shown
in Рис. 8.11.
Рис. 8.11 Зоны Универсальной поперечной проекции Меркатора. Для Южной Африки используются зоны UTM: 33S, 34S, 35S, и 36S.
As you can see in Рис. 8.11 and Рис. 8.12, South Africa is
covered by four UTM zones to minimize distortion. The zones are called
UTM 33S, UTM 34S, UTM 35S and UTM 36S.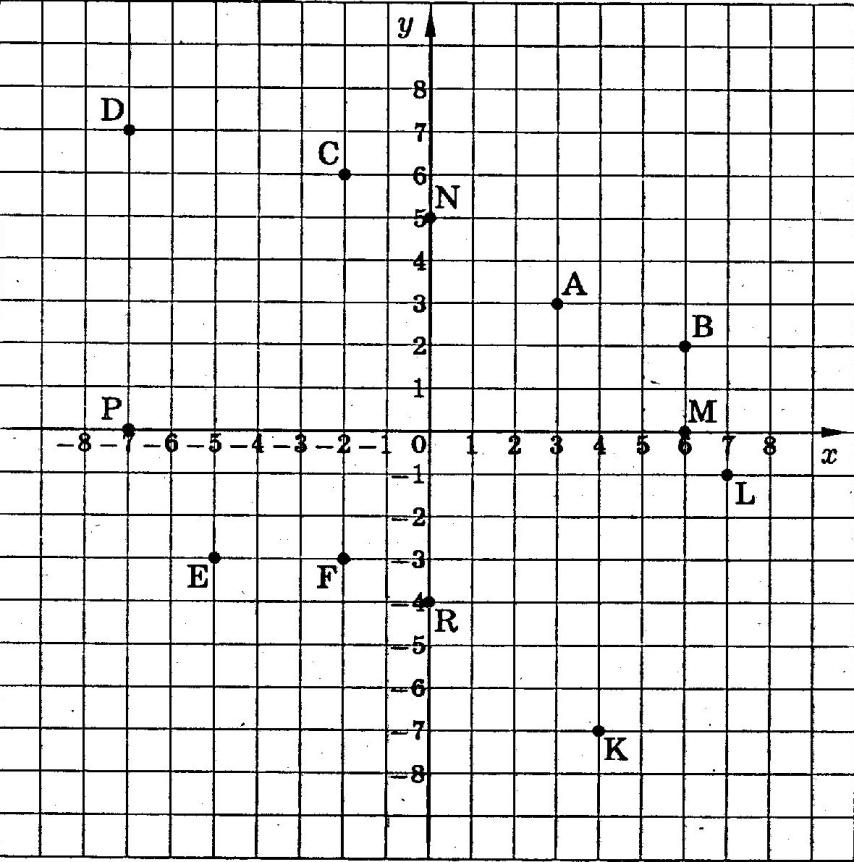 The S after the zone
The S after the zone
means that the UTM zones are located south of the equator.
Рис. 8.12 Зоны UTM 33S, 34S, 35S и 36S с центральными меридианами используются для высокоточного проецирования территории Южной Африки. Красный крест показывает Зону интереса (Area of Interest — AOI).
Say, for example, that we want to define a two-dimensional coordinate within the
Area of Interest (AOI) marked with a red cross in Рис. 8.12. You can
see, that the area is located within the UTM zone 35S. This means, to minimize
distortion and to get accurate analysis results, we should use UTM zone 35S
as the coordinate reference system.
The position of a coordinate in UTM south of the equator must be indicated with
the zone number (35) and with its northing (Y) value and easting (X)
value in meters. The northing value is the distance of the position from
the equator in meters. The easting value is the distance from the
The easting value is the distance from the
central meridian (longitude) of the used UTM zone. For UTM zone 35S it is
27 degrees East as shown in Рис. 8.12. Furthermore, because we
are south of the equator and negative values are not allowed in the UTM coordinate
reference system, we have to add a so called false northing value of
10,000,000 m to the northing (Y) value and a false easting value of 500,000 m to
the easting (X) value. This sounds difficult, so, we will do an example that
shows you how to find the correct UTM 35S coordinate for the Area of
Interest.
8.6.1. The northing (Y) value
The place we are looking for is 3,550,000 meters south of the equator, so the
northing (Y) value gets a negative sign and is -3,550,000 m. According to
the UTM definitions we have to add a false northing value of 10,000,000 m.
This means the northing (Y) value of our coordinate is 6,450,000 m (-3,550,000 m
+ 10,000,000 m).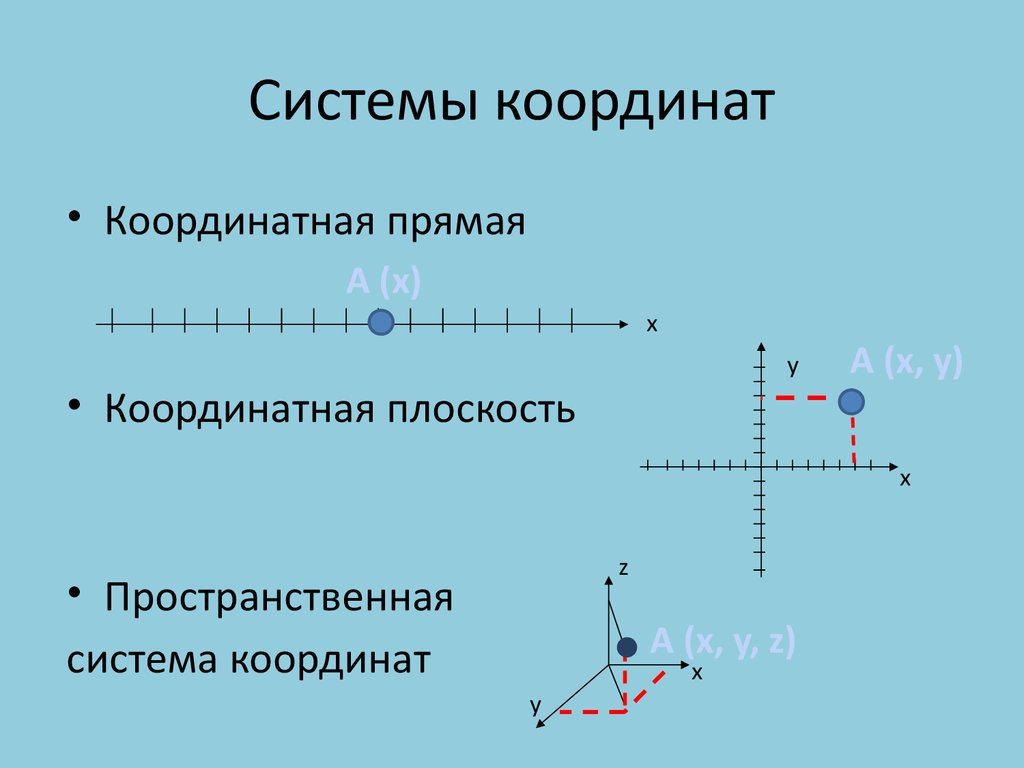
8.6.2. The easting (X) value
First we have to find the central meridian (longitude) for the UTM zone
35S. As we can see in Рис. 8.12 it is 27 degrees East. The place
we are looking for is 85,000 meters West from the central meridian. Just like
the northing value, the easting (X) value gets a negative sign, giving a result
of -85,000 m. According to the UTM definitions we have to add a false
easting value of 500,000 m. This means the easting (X) value of our coordinate
is 415,000 m (-85,000 m + 500,000 m). Finally, we have to add the zone number
to the easting value to get the correct value.
В результате, координаты нашей Точки интереса, в значениях системы координат UTM зона 35S будут выглядеть следующим образом: 35 415,000 м В / 6,450,000 м С. В некоторых ГИС, когда правильно указана проекция UTM зона 35S и единицы измерения в метрах, номер зоны можно убрать и записать пару координат в более простом виде 415,000 6,450,000.
8.7. Перепроецирование «на лету»
Как вы, вероятно, может себе представить, возможна ситуация когда данные, которые вы хотите использовать в ГИС, спроецированы в различных системах координат. Например, у вас может быть векторный слой границ Южной Африки в UTM 35S и другой векторный слой с информацией о замерах объема осадков, в географической системе координат WGS 84. В ГИС эти два векторных слоя отобразятся в совершенно разных местах окна карты, потому что они имеют разные проекции.
To solve this problem, many GIS include a functionality called on-the-fly
projection. It means, that you can define a certain projection when you start
the GIS and all layers that you then load, no matter what coordinate reference
system they have, will be automatically displayed in the projection you defined.
This functionality allows you to overlay layers within the map window of your
GIS, even though they may be in different reference systems.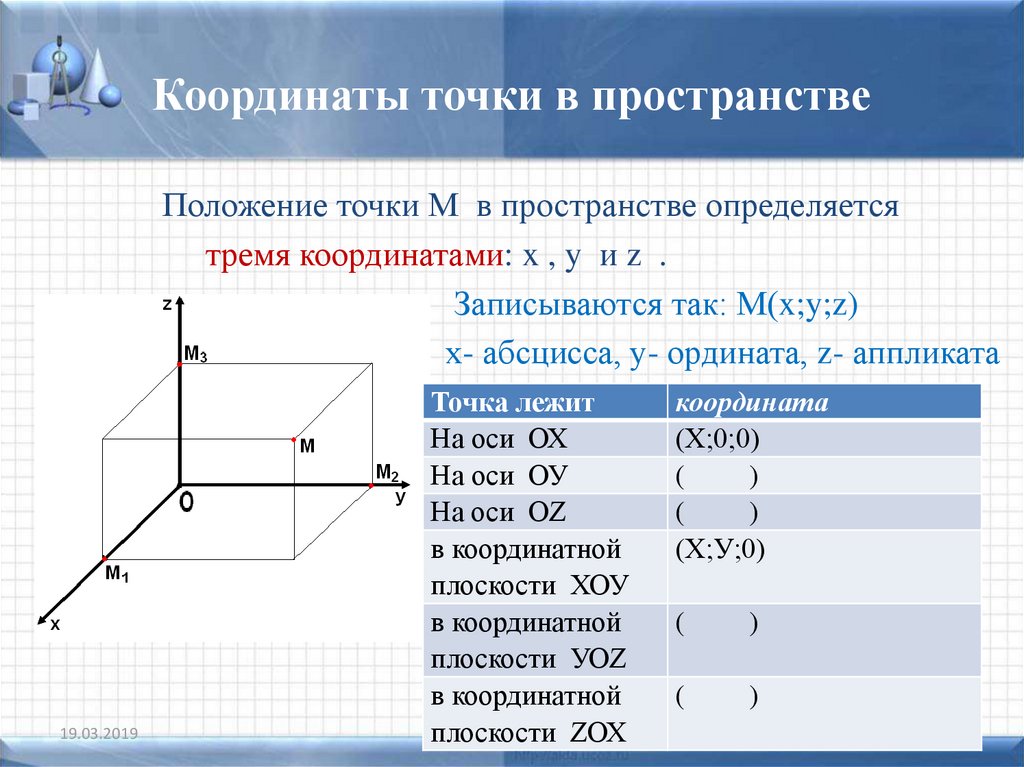
In QGIS, this functionality is applied by default.
8.8. Частые ошибки / о чем стоит помнить
Тема картографическая проекция очень сложная и даже профессионалы-географы, геодезисты зачастую испытывают сложности с правильным определением проекций карт и систем координат. Обычно, если работаете в ГИС, у вас уже есть спроецированные данные для начала работы. В большинстве случаев, эти данные будут перепроецироваться в определённую систему координат, поэтому не возникнет необходимости создавать новую систему координат или вручную перепроецировать данные в другую систему координат. Тем не менее, всегда полезно знать что такое проекция карты и система координат.
8.9. Что мы узнали?
Подведём итоги:
Проекция карты изображает поверхность Земли на двухмерном, плоском листе бумаги или экране компьютера.
Существую мировые проекции карт, но большинство проекций созданы и оптимизированы для проецирования малых площадей поверхности Земли.
Картографические проекции никогда абсолютно точно не передают сферическую поверхность Земли. Существуют искажения углов, длин и площадей. Невозможно одновременно корректно отображать все эти характеристики с помощью проекции карты.
Система координат (CRS) определяет, с помощью координат, каким образом двухмерная,спроецированная карта соотносится с реальной местностью на поверхности Земли.
Существуют два различных типа систем координат: Географические системы координат и Системы координат проекций.
Перепроецирование «на лету» — функция ГИС, которая позволяет совмещать слои, даже если они имеют различные системы координат.
8.10. Попробуйте сами!
Вот некоторые идеи для заданий:
Start QGIS
In Project ► Properties… ► CRS check No
projection (or unknown/non-Earth projection)Load two layers of the same area but with different projections
Let your pupils find the coordinates of several places on the two layers.
You can show them that it is not possible to overlay the two layers.Then define the coordinate reference system as Geographic/WGS 84 inside the
Project Properties dialogLoad the two layers of the same area again and let your pupils see how
setting a CRS for the project (hence, enabling «on-the-fly» projection)
works.You can open the Project Properties dialog in QGIS and show your
pupils the many different Coordinate Reference Systems so they get an idea of
the complexity of this topic. You can select different CRSs to display the
same layer in different projections.
8.11. Стоит учесть
If you don’t have a computer available, you can show your pupils the principles
of the three map projection families. Get a globe and paper and demonstrate how
cylindrical, conical and planar projections work in general. With the help of a
transparency sheet you can draw a two-dimensional coordinate reference system
showing X axes and Y axes.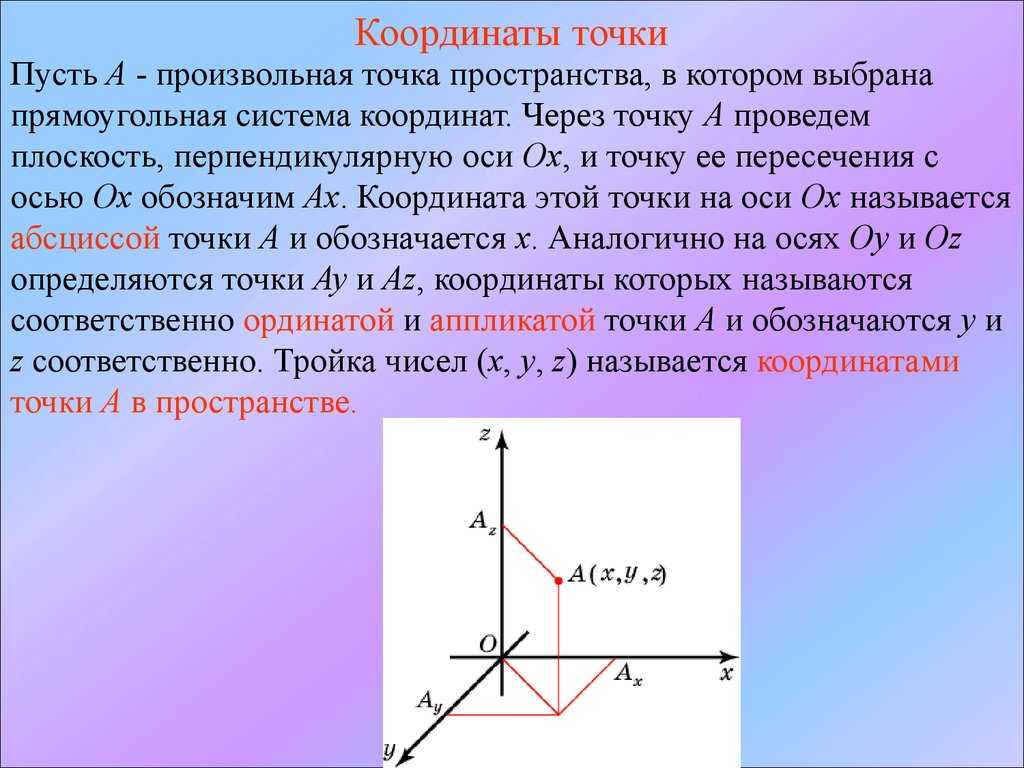 Then, let your pupils define coordinates (X and Y
Then, let your pupils define coordinates (X and Y
values) for different places.
8.12. Дополнительная литература
Книги:
Chang, Kang-Tsung (2006). Introduction to Geographic Information Systems. 3rd
Edition. McGraw Hill. ISBN: 0070658986DeMers, Michael N. (2005). Fundamentals of Geographic Information Systems. 3rd
Edition. Wiley. ISBN: 9814126195Galati, Stephen R. (2006): Geographic Information Systems Demystified. Artech
House Inc. ISBN: 158053533X
Веб-сайты:
https://foote.geography.uconn.edu/gcraft/notes/mapproj/mapproj_f.html
http://geology.isu.edu/wapi/geostac/Field_Exercise/topomaps/index.htm
Работа с проекциями в QGIS подробно описана в Руководстве пользователя QGIS.
8.13. Что дальше?
Следующий раздел посвящен созданию карт.
Система координат станка с ЧПУ
Для определения координатного пространства внутри станка и пространства для перемещения инструмента (фрезы, резца, экструдера, лазерного луча и др. ) во всех современных станках используются декартова система координат с осями X, Y и Z.
) во всех современных станках используются декартова система координат с осями X, Y и Z.
Декартова система координат — прямолинейная система координат с взаимно перпендикулярными осями. Это наиболее простая и поэтому часто используемая система координат:
Помимо линейных осей, станок может иметь несколько поворотных осей. Их обозначение зависит от того, вокруг какой линейной оси они вращаются. Ниже приведена схема системы координат с поворотными осями:
Для позиционирования инструмента в системе координат могут использоваться разные технические устройства и механизмы. В этой статье рассматриваются системы координат, используемые в станках с ЧПУ, включая рабочую систему координат (WCS), машинную систему координат (MCS) и систему смещения.
Роль системы координат
Станок должен понимать положение заготовки в физическом пространстве — просто поместить кусок металла в ЧПУ станок и нажать кнопку «Пуск» недостаточно.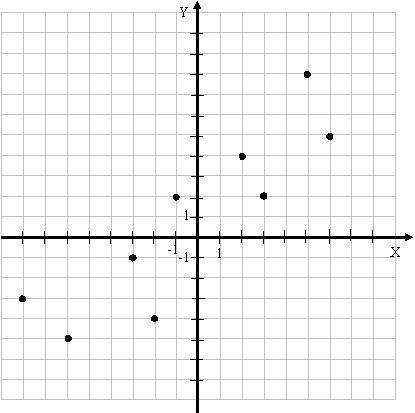 Для решения этой задачи используется рабочая система координат станка.
Для решения этой задачи используется рабочая система координат станка.
Задача усложняется, когда в процессе обработки используется несколько инструментов. Каждый из них имеет различную длину, которая изменяет расстояние между базовой точкой шпинделя и заготовкой. Например, точка начала для 3-мм фрезы с небольшой длиной будет отличаться от точки начала для 6-мм сверла, предназначенного для сверления глубоких отверстий.
Система координат позволяет сообщить управляющей программе:
-
где в пространстве находится заготовка; -
как далеко от неё находится инструмент; -
как должен двигаться инструмент в процессе обработки детали.
Используя декартову систему координат, можно управлять движением инструмента вдоль каждой оси, что уже позволит сделать из заготовки деталь.
Система координат классического фрезерного станка с точки зрения оператора:
-
ось X задаёт перемещение «влево» и «вправо»; -
ось Y — «вперед» и «назад»; -
ось Z — «вверх» и «вниз».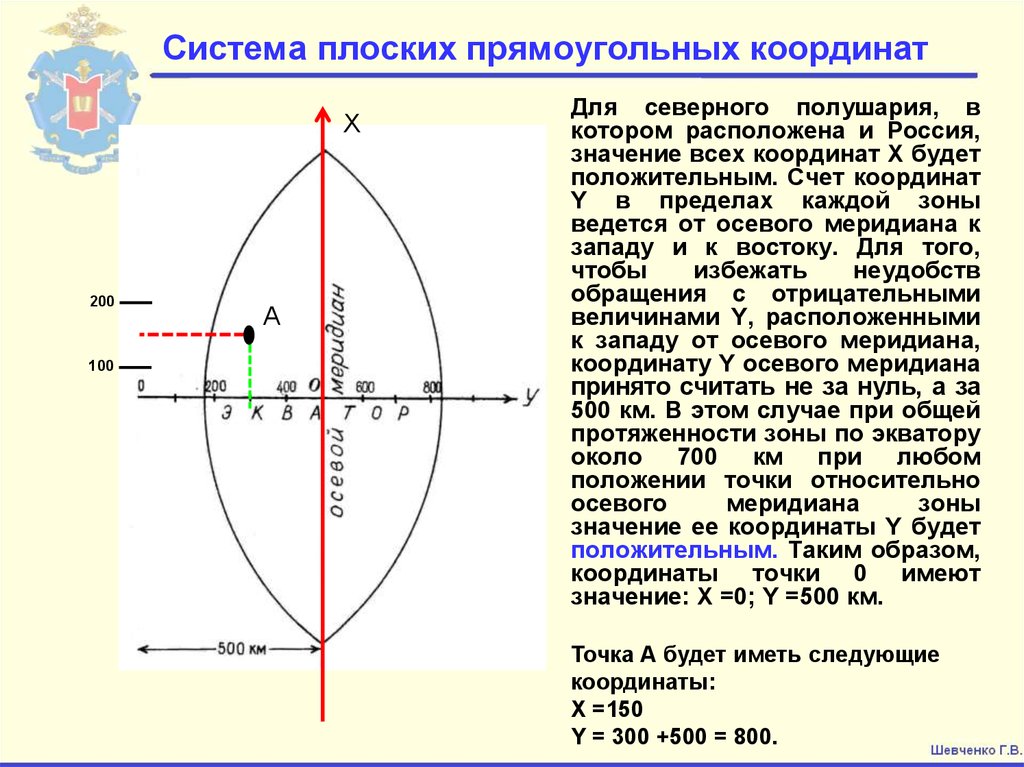
Система координат классического токарного станка:
Многие современные токарные станки с ЧПУ оснащаются фрезерным инструментом. Но как быть, если токарный станок имеет всего две оси, а требуется обработать квадрат или шестигранник? Производители оборудования предлагают для таких случаев два решения.
1. Перейти от декартовой системы координат к полярной
Полярная система координат — это двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. В случае с токарным станком полярный угол это угол поворота шпинделя относительно инструмента, а полярный радиус это положение инструмента по оси Х.
Иными словами, чтобы определить точку в пространстве, необходимо указать радиус и угол отклонения от оси Х. На практике использовать такую систему координат, как правило, неудобно, поэтому ЧПУ преобразовывает угловое значение поворота шпинделя в более понятную линейную координату.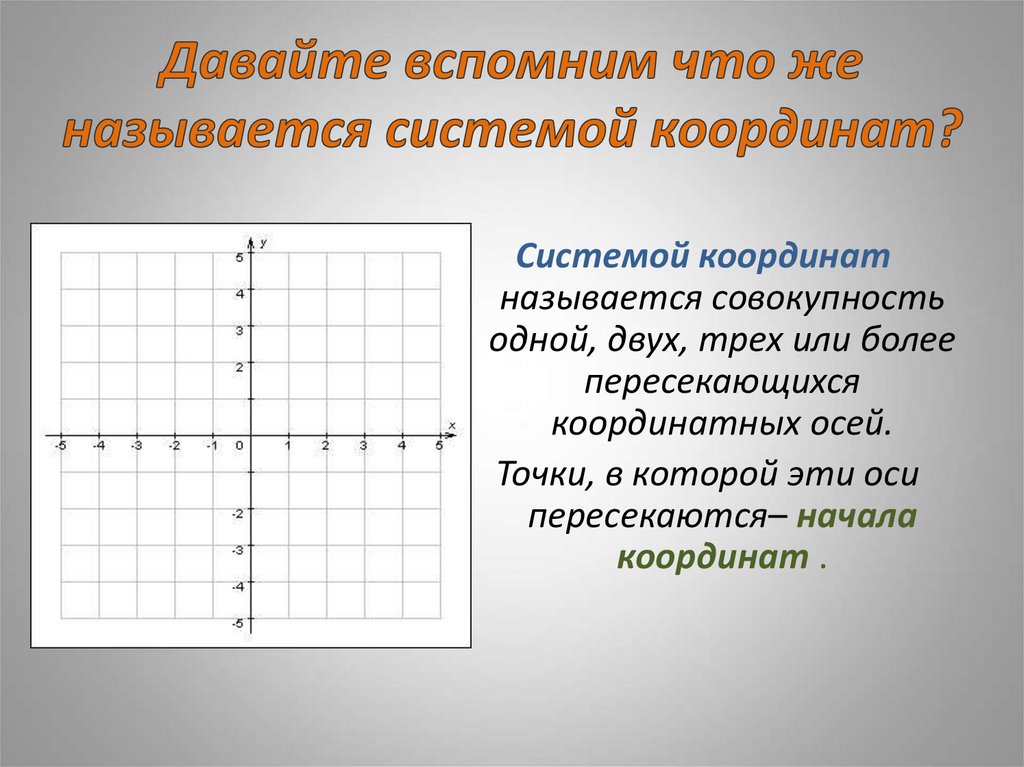 При программировании в полярных координатах необязательно пересчитывать углы. Кроме того, обработка в полярных координатах не позволяет выполнять некоторые фрезерные операции.
При программировании в полярных координатах необязательно пересчитывать углы. Кроме того, обработка в полярных координатах не позволяет выполнять некоторые фрезерные операции.
2. Использовать дополнительную ось перемещения
Вторым способом является установка дополнительной оси перемещения (ось Y). Такая опция позволяет значительно расширить возможности станка, и, в отличие от полярных координат, пригодна для выполнения любых фрезерных операций. Недостаток такой опции — это её стоимость и сравнительно небольшой диапазон перемещений.
Движение вдоль системы координат всегда основано на том, как движется инструмент, а не стол с заготовкой. Например, увеличение значения координаты X приведёт к смещению стола влево, но если смотреть с точки зрения инструмента, он движется вправо вдоль заготовки.
Кроме трёх или двух осей, в любой системе координат задаётся исходная точка. Каждый станок с ЧПУ имеет свою собственную внутреннюю исходную точку, которая называется Machine Home или Референтная позиция.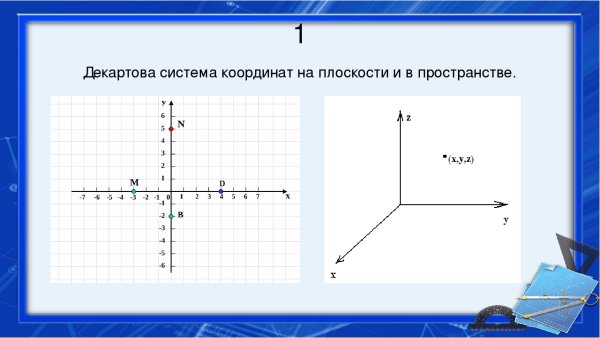
Привязка системы координат
Чтобы упростить написание программ ЧПУ, используется система рабочих координат или WCS. WCS определяет конкретную исходную точку в блоке материала, обычно в программном обеспечении САМ.
Перед началом выполнения управляющей программы станку необходимо указать расположение заготовки относительно его системы координат (MCS).
Для этого оператор должен указать величину смещения по каждой оси станка. Это можно сделать несколькими способами, но на многих современных станках существует возможность оснащения его автоматической системой измерения заготовки.
Такая система представляет собой высокоточный датчик, который устанавливается в шпинделе станка (фрезерный станок) или в инструментальной револьверной головке (токарный станок). Датчик на медленной подаче производит касание заготовки и передает сигнал на ЧПУ, которая в свою очередь заносит в память величину смещения вдоль соответствующей оси.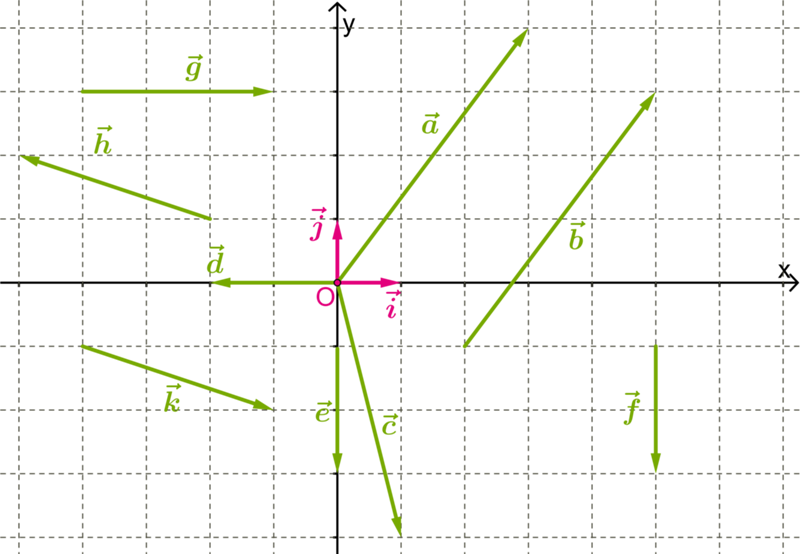 Такое устройство позволяет значительно ускорить наладку станка.
Такое устройство позволяет значительно ускорить наладку станка.
Выбор исходной точки для WCS требует тщательного планирования. Необходимо учитывать несколько условий:
-
исходная точка должен быть найдена механическими средствами с помощью искателя края или зонда; -
одинаковые исходные точки помогают экономить время при замене деталей; -
исходная точка должна учитывать требуемые допуски для всех последующих операций.
Если на станке обрабатывается несколько деталей в одном задании, для каждой детали может быть назначено собственное смещение. Это позволяет станку с ЧПУ точно связать свою систему координат с системами нескольких деталей в разных местах и выполнять несколько настроек одновременно.
Коррекция инструмента
Обычно для изготовления одной и той же детали используется несколько инструментов.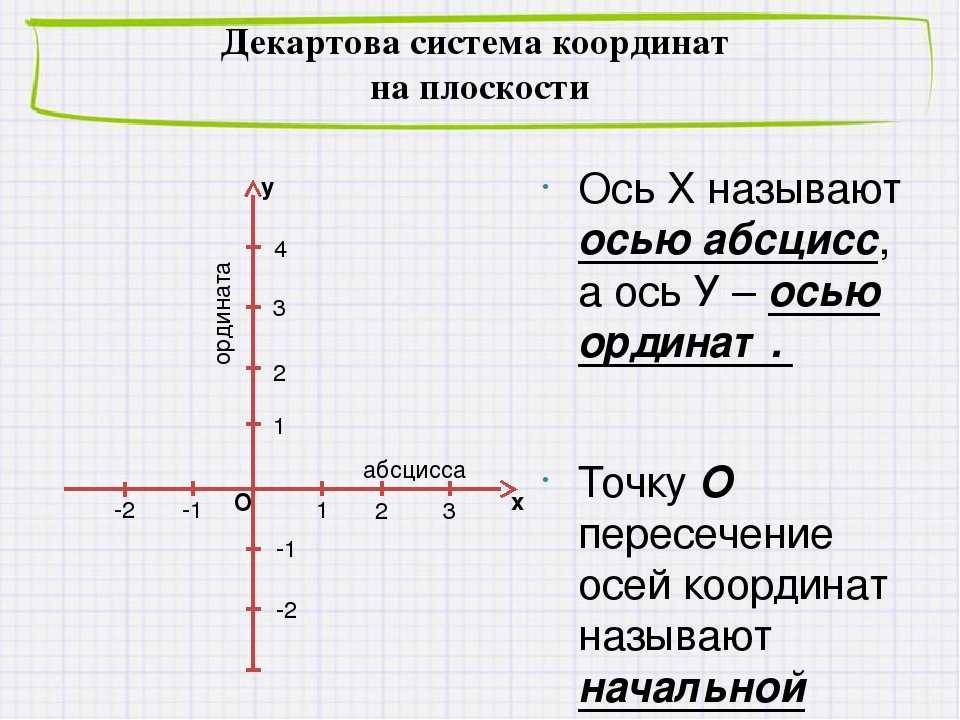 Как отмечалось выше, разный инструмент имеет разные геометрические параметры, которые станок должен учитывать при перемещении. Для этого в станке существует таблица смещения инструмента, в которой указываются геометрические параметры инструмента (для токарных резцов: смещение от нулевой точки станка, для фрезерного инструмента длина и диаметр). Для записи коррекции используют несколько способов:
Как отмечалось выше, разный инструмент имеет разные геометрические параметры, которые станок должен учитывать при перемещении. Для этого в станке существует таблица смещения инструмента, в которой указываются геометрические параметры инструмента (для токарных резцов: смещение от нулевой точки станка, для фрезерного инструмента длина и диаметр). Для записи коррекции используют несколько способов:
-
Измерения касанием. Этот способ не требует каких либо специальных технических средств или дополнительного оснащения, но вместе с этим является наименее точным. Суть заключается в касании заготовки инструментом либо напрямую, либо через концевые меры. -
Использование пресетера (необходимо наличие в цеху специального устройства — пресетора).
Пресетер позволяет точно измерить длину и диаметр инструмента. Это наиболее точный метод измерения, но вместе с тем наиболее затратный и наименее удобный, так как для проведения измерений инструмент необходимо извлекать из станка.
-
Измерение при помощи датчика измерения инструмента. В зависимости от типа датчика этот способ не уступает по точности предыдущему, но при этом менее затратный и наиболее эффективный, так как привязку инструмента можно осуществлять в автоматическом режиме. Суть данного способа заключается в установке в рабочую зону станка высокоточного датчика для измерения инструмента:
Инструмент касается контактной поверхности датчика, а датчик в свою очередь передает сигнал на ЧПУ, которая фиксирует данные в таблице инструментов. Измерение может проводиться как в ручном режиме, так и в автоматическом (в зависимости от типа датчика).
С помощью инструментов нашего портала Вы сможете легко сравнить между собой станки от разных производителей и принять верное решение о покупке оборудования!
Также вы можете обратиться за помощью к специалистам Центра технологической поддержки портала СТАНКОТЕКА — для этого оставьте заявку на сайте или позвоните по телефону, указанному на странице «Контакты».
Система координат в C как массив
Я не думаю, что вы можете сделать это с массивами, но вы можете сделать это с указателями на элементы массива.
Однако, я бы не стал этого делать, если бы у меня не было ОЧЕНЬ серьезной причины . Отрицательно индексируемые указатели не будут тем, что ожидает читатель вашего кода, поэтому их легко будет случайно использовать неправильно. Для ясности вам может быть лучше с функциональным решением, если только оно не должно быть ОЧЕНЬ быстрым.
С этим покончено, давайте сделаем это!
Судя по вашей попытке, вы можете запутаться в массивах и указателях. Помните, что это не одно и то же.
Теперь C не запрещает вам использовать отрицательные индексы, что может иметь смысл, когда вы используете указатель. Итак, вы можете сделать это:
int a[5]; интервал *b = а + 2; // или &a[2] b[-2] // это [0] b[-1] // это [1] b[0] // ia a[2] и т. д.
Итак, я думаю, что следующий код вам подойдет.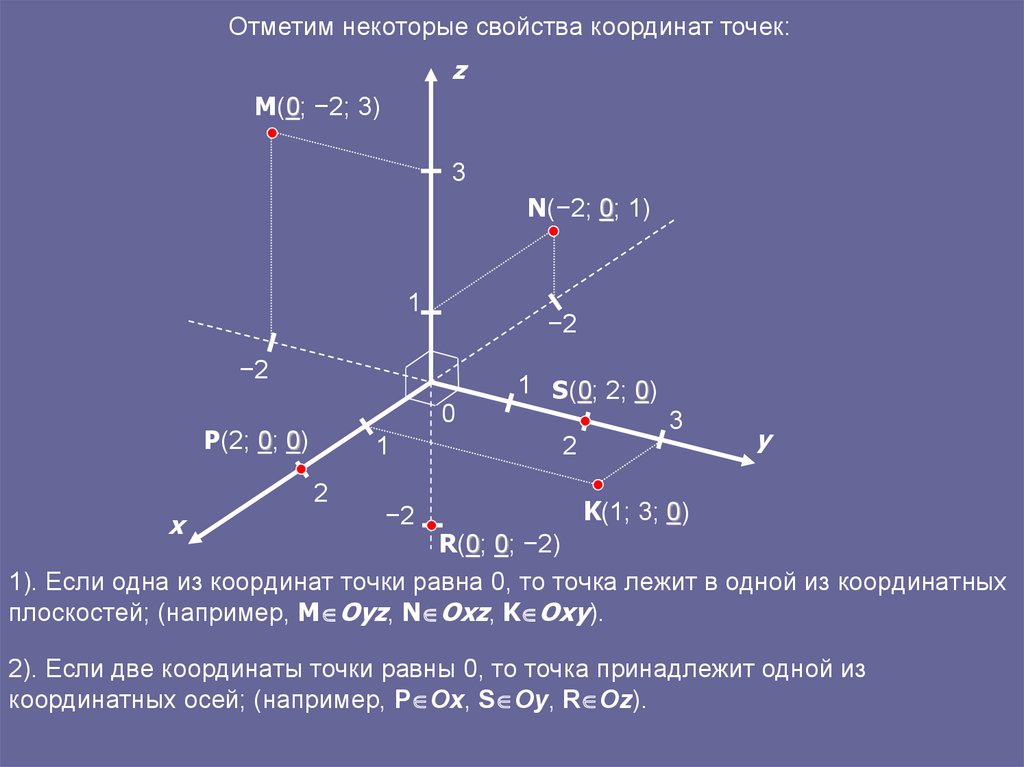
#define GRIDSIZE 101
.....
int map_memory[GRIDSIZE][GRIDSIZE];
int *map_rows[GRIDSIZE];
интервал **карта;
инт я;
int gridMidPoint = GRIDSIZE / 2;
for(i = 0; i < GRIDSIZE; i++) {
map_rows[i] = &(map_memory[i][0]) + gridMidPoint;
}
карта = map_rows + gridMidPoint;
Затем вы можете использовать его именно так, как вы ожидаете - с размером сетки 101:
for(i = -50; i <= 50; i++) {
for(j = -50; j <= 50; j++) {
карта[i][j] = i+j;
}
}
Или, в более общем виде:
for(i = -1 * gridMidPoint; i <= gridMidPoint; i++) {
for(j = -1 * gridMidPoint; j <= gridMidPoint; j++) {
карта[i][j] = i+j;
}
}
Поскольку оба массива создаются в стеке, ничего освобождать не нужно.
Что здесь происходит? Позвольте мне сломать его. Во-первых, мы создаем резервный массив:
int map_memory[GRIDSIZE][GRIDSIZE];
Далее нам нужен массив указателей, которые мы собираемся использовать в качестве строк:
int *map_rows[GRIDSIZE];
Нам нужно, чтобы это были указатели, потому что они будут указывать на середину массивов в только что созданном двумерном массиве.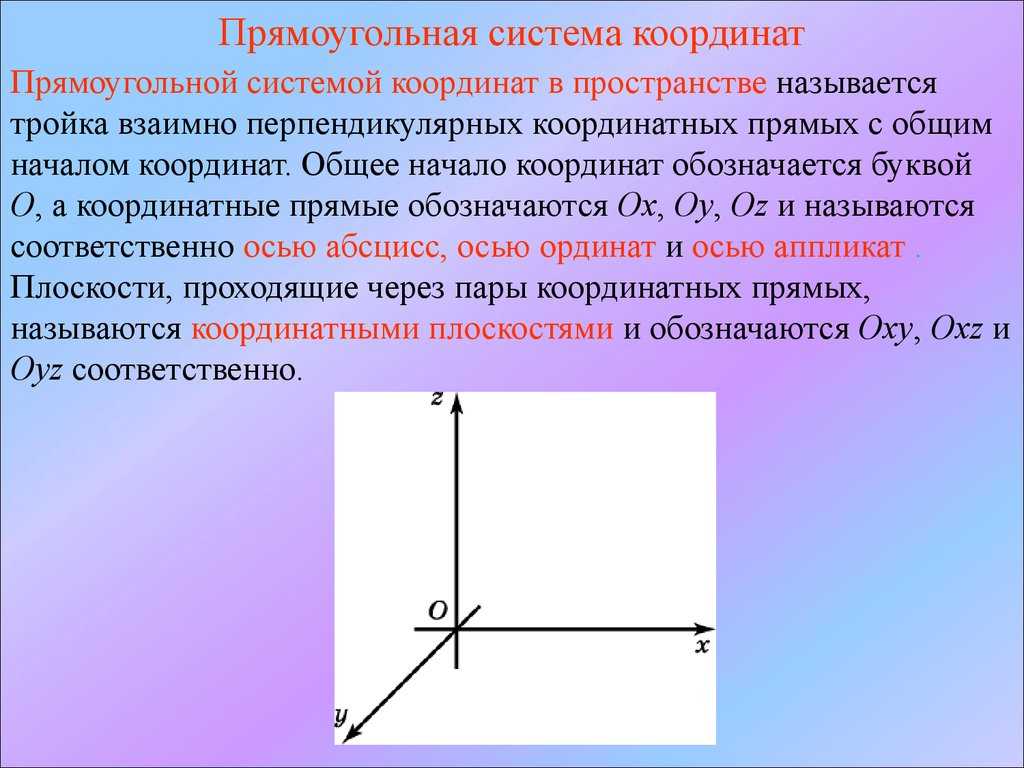
int gridMidPoint = GRIDSIZE / 2;
Здесь мы вычисляем среднюю точку. Я предполагаю, что вам нужно одинаковое количество элементов массива по обе стороны от нуля, поэтому вам не нужен +1 из вашего примера.
for(i = 0; i < GRIDSIZE; i++) {
map_rows[i] = &(map_memory[i][0]) + gridMidPoint;
}
Этот код перебирает каждый элемент в нашем массиве строк и устанавливает эту строку так, чтобы она указывала на середину соответствующей строки в двумерном массиве. Вы также можете написать:
map_rows[i] = &map_memory[i][gridMidPoint];
Но я лично считаю, что вариант с лишними скобками и дополнением читается понятнее. Я думаю, если вы делаете необычные вещи с указателями, вы должны точно объяснить, что происходит, для следующего человека, который прочитает ваш код.
Наконец, нам нужно, чтобы наш указатель map указывал на середину строк:
map = map_rows + gridMidPoint;
Готово!
Помните, что двумерные массивы на самом деле являются одним блоком непрерывной памяти.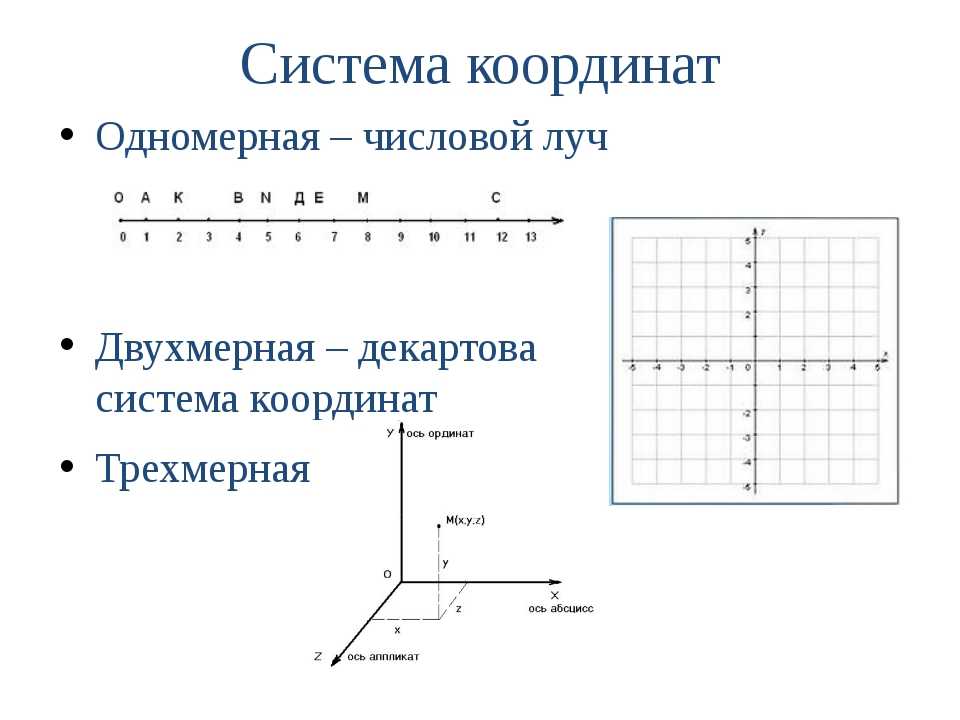 Это означает, что
Это означает, что map[0][gridMidPoint+1] совпадает с местоположением map[1][-1*gridMidPoint] . На самом деле это ничем не отличается от обычного двумерного массива, но об этом следует помнить при отладке.
Система координат
Важно:
Этот документ может не представлять лучшие практики для текущей разработки. Ссылки на загрузки и другие ресурсы могут стать недействительными.
Система координат — это двумерное пространство, в котором вы размещаете, изменяете размер, трансформируете и рисуете видимые объекты вашего приложения, а также размещаете пользовательские события. Приложения в iOS и OS X полагаются на систему координат, которая находит точки с использованием горизонтальной и вертикальной осей (то есть оси x и оси y), которые пересекаются в общей исходной точке (0,0, 0,0). От начала координат положительные значения увеличиваются в одном направлении по обеим осям; отрицательные значения увеличиваются в противоположных направлениях.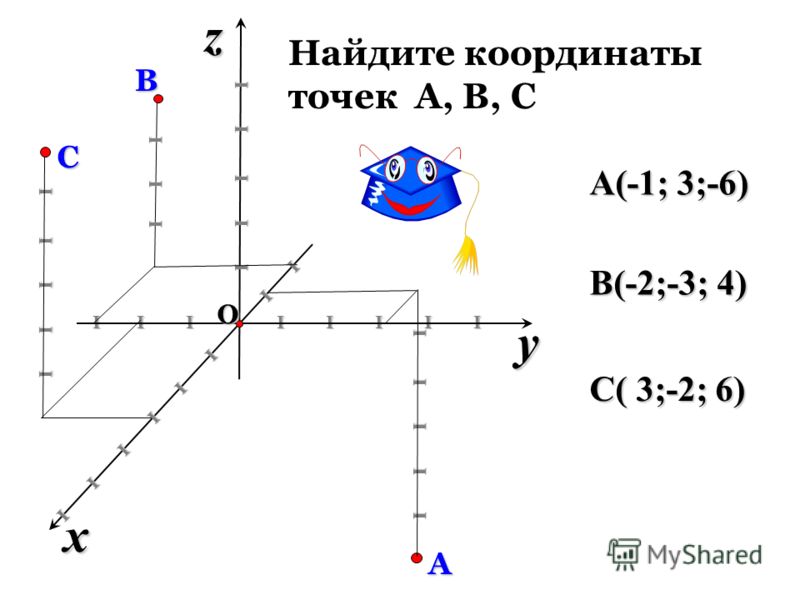 Вы выражаете точку в этом координатном пространстве как пару чисел с плавающей запятой в единицах пользовательского пространства, которые не привязаны к любым единицам в пространстве устройства, таким как пиксели. Рисование почти всегда происходит в секторе координатного пространства, где значения как по оси X, так и по оси Y положительны.
Вы выражаете точку в этом координатном пространстве как пару чисел с плавающей запятой в единицах пользовательского пространства, которые не привязаны к любым единицам в пространстве устройства, таким как пиксели. Рисование почти всегда происходит в секторе координатного пространства, где значения как по оси X, так и по оси Y положительны.
Системы координат могут иметь разные ориентации чертежа
Система координат по умолчанию для видов в iOS и OS X отличается ориентацией вертикальной оси:
OS X. Система координат по умолчанию имеет начало в нижней слева от области рисования; положительные значения простираются вверх и вправо от него. Вы можете программно «перевернуть» систему координат вида в OS X.
iOS. Система координат по умолчанию имеет начало в левом верхнем углу области рисования, а положительные значения простираются вниз и вправо от нее. Вы не можете изменить ориентацию по умолчанию системы координат вида в iOS, то есть вы не можете «перевернуть» ее.
Окна и представления имеют свои собственные системы координат
В приложении в любой момент может использоваться несколько систем координат. Окно позиционируется и измеряется в экранных координатах, которые определяются системой координат для дисплея. Само окно представляет собой базовую систему координат для всего рисования и обработки событий, выполняемых его представлениями. Каждый вид в окне поддерживает свою собственную локальную систему координат для рисования; эта система координат определяется представлением ограничивает свойство. Свойство представления frame выражает его местоположение и размер в системе координат его суперпредставления; тот же вид, в свою очередь, предоставляет базовую систему координат для позиционирования и изменения размеров его подвидов.
Платформы AppKit и UIKit предоставляют методы для преобразования точек и прямоугольников между системами координат представления и другого представления, представления и его окна, а также (в OS X) экрана и окна.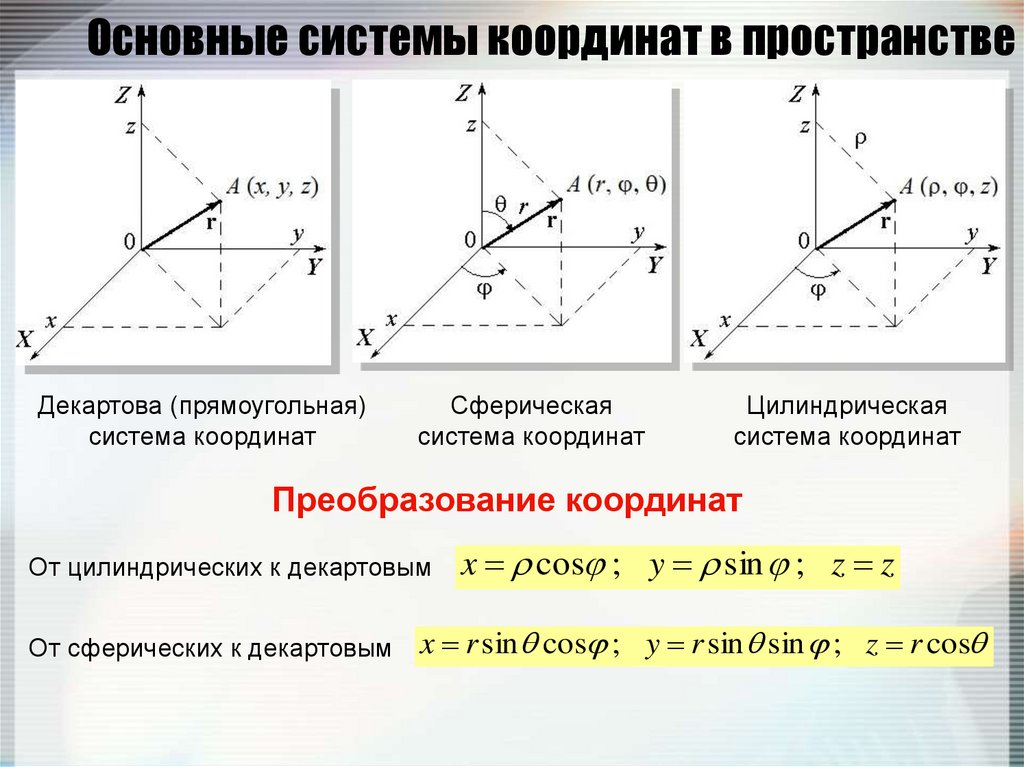
Всего комментариев: 0