Шаговый: Шаговый двигатель
Содержание
Шаговый двигатель
Дмитрий Левкин
- Конструкция
- Характеристики
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.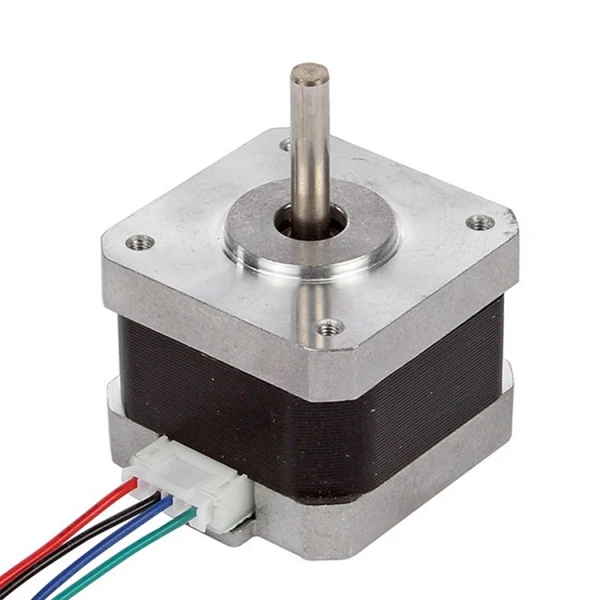
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре.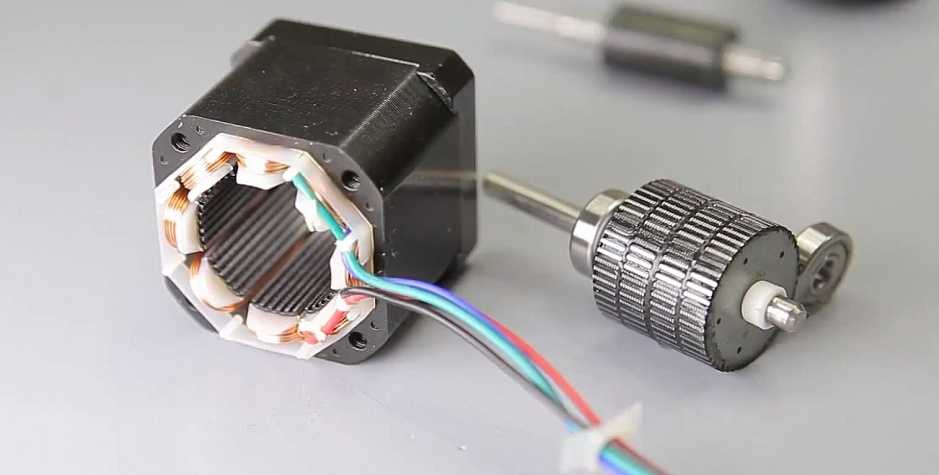 Каждая секция обмотки включается отдельно.
Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.

Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления.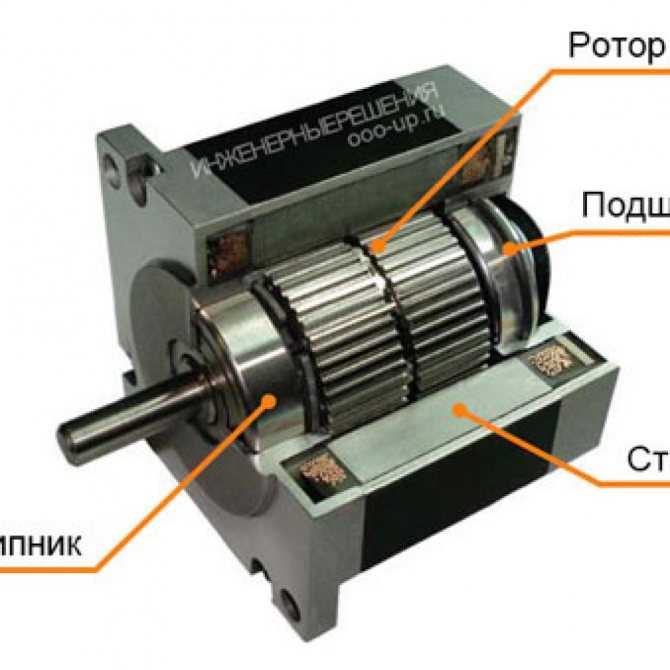 При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы.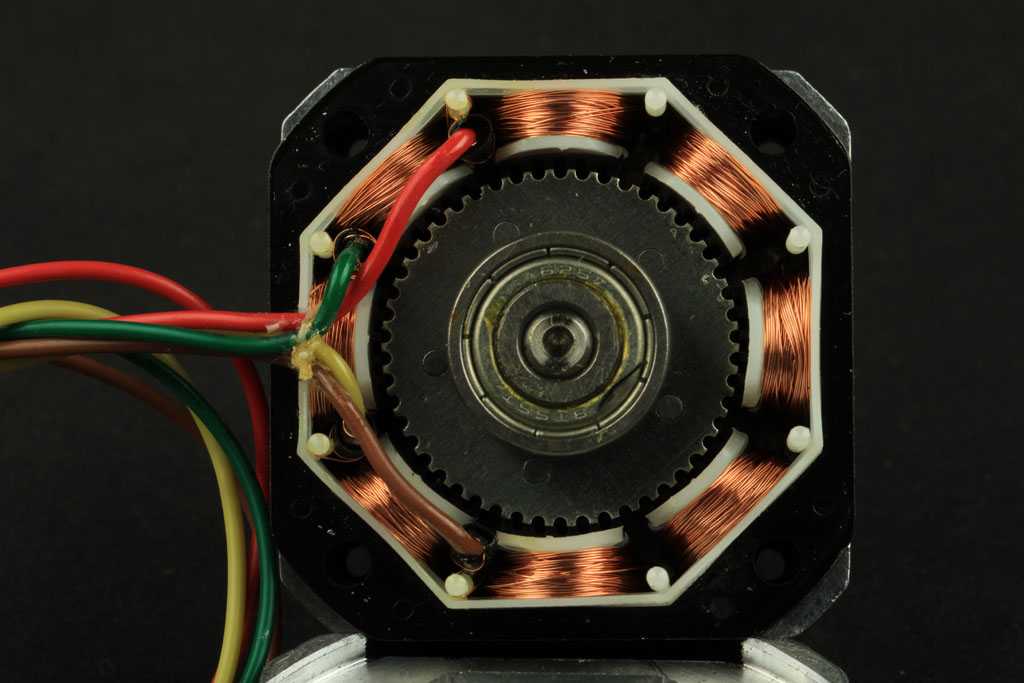 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно.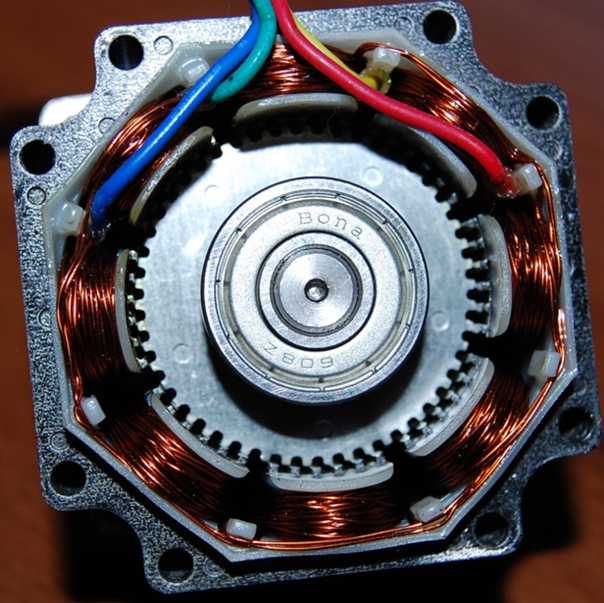 Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток.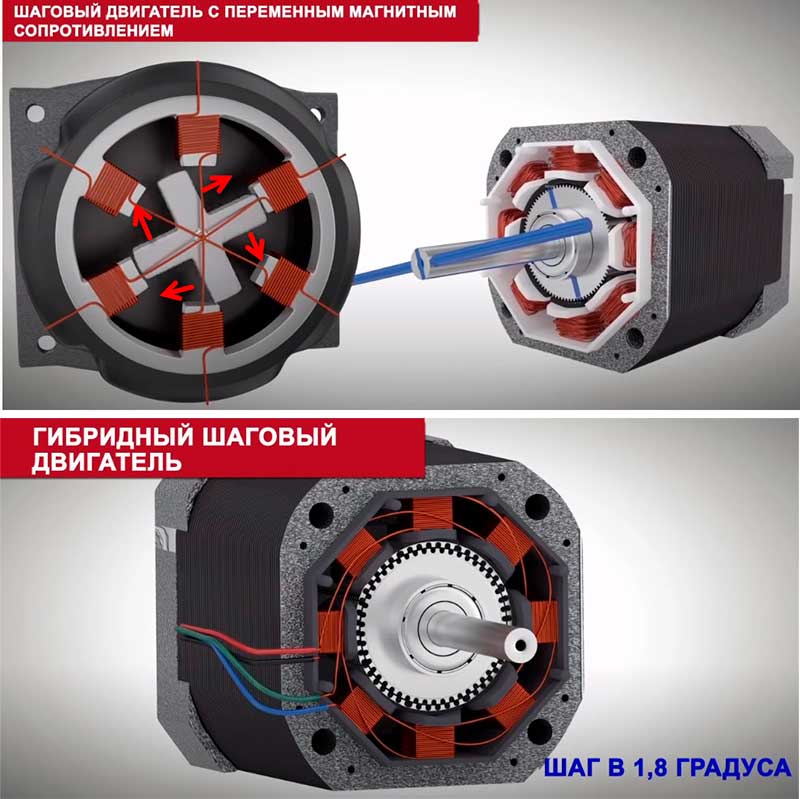 При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже).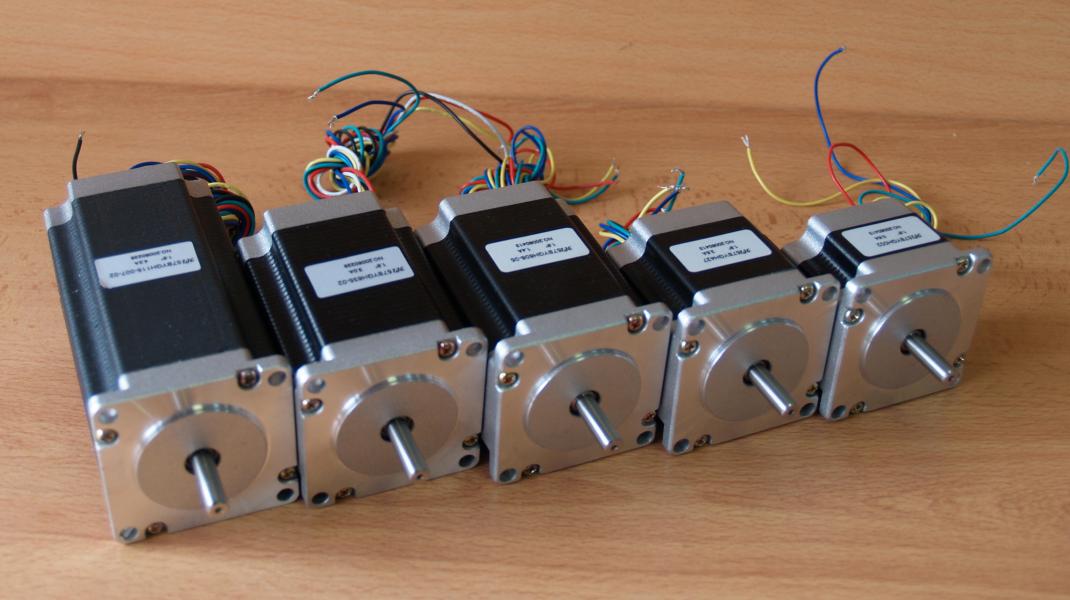 Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями.
 Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага; - полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
Библиографический список
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель — это электромеханичское
устройство, которое преобразует электрические импульсы в дискретные
механические перемещения. Так, пожалуй, можно дать строгое определение.
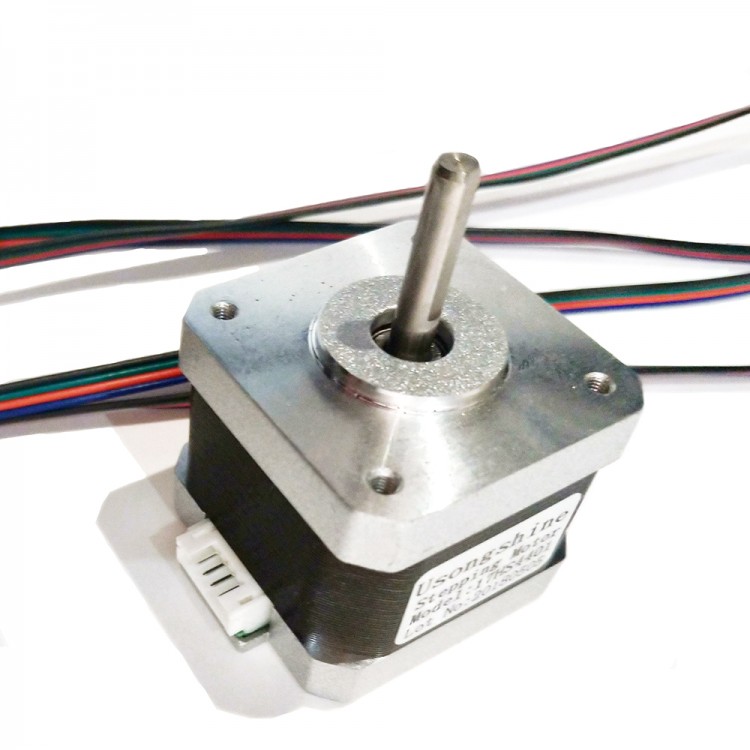
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он
практически ничем не отличается от двигателей других типов. Чаще всего это
Чаще всего это
круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными
свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо. ..
..
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных
двигателей постоянного тока. Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.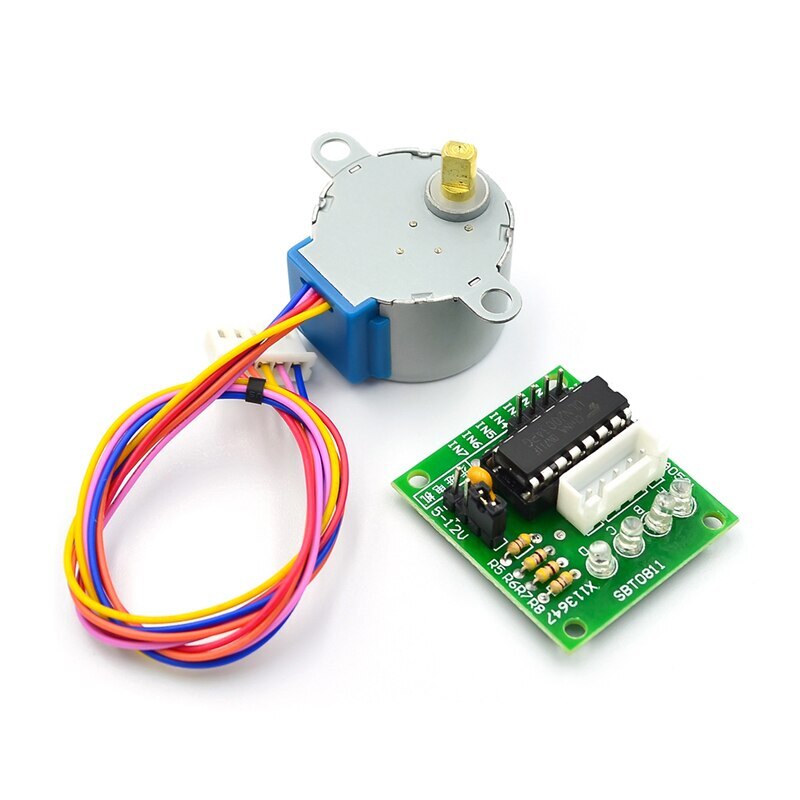
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является
возможность осуществлять точное позиционирование и регулировку скорости
без датчика обратной связи. Это очень важно, так как такие датчики могут
стоить намного больше самого двигателя. Однако это подходит только для
систем, которые работают при малом ускорении и с относительно постоянной
нагрузкой. В то же время системы с обратной связью способны работать с
большими ускорениями и даже при переменном характере нагрузки. Если
нагрузка шагового двигателя превысит его момент, то информация о положении
ротора теряется и система требует базирования с помощью, например,
концевого выключателя или другого датчика. Системы с обратной связью не
имеют подобного недостатка.
При проектировании конкретных систем приходится делать
выбор между сервомотором и шаговым двигателем. Когда требуется
прецизионное позиционирование и точное управление скоростью, а требуемый
момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для
повышения момента может быть использован понижающий редуктор. Однако для
шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных
двигателей, у котрых момент растет с увеличением скорости, шаговый
двигатель имеет больший момент на низких скоростях. К тому же, шаговые
двигатели имеют гораздо меньшую максимальную скорость по сравнению с
коллекторными двигателями, что ограничивает максимальное передаточное
число и, соответственно, увеличение момента с помощью редуктора. Готовые
шаговые двигатели с редукторами хотя и существуют, однако являются
экзотикой. Еще одним фактом, ограничивающим применение редуктора, является
присущий ему люфт.
Возможность получения низкой частоты вращения часто
является причиной того, что разработчики, будучи не в состоянии
спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В
то же время коллекторный двигатель имеет более высокую удельную мощность,
низкую стоимость, простую схему управления, и вместе с одноступенчатым
червячным редуктором он способен обеспечить тот же диапазон скоростей, что
и шаговый двигатель. К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
| Применение шаговых двигателей Биполярные и униполярные шаговые двигатели Шаговые двигатели с постоянными магнитами Гибридные шаговые двигатели |
Виды шаговых двигателей Управление фазами шаговых двигателей Двигатели с переменным магнитным сопротивлением |
Шаговый двигатель
Определение и значение — Merriam-Webster
шаг · за
ˈste-pər
: тот (например, быстрая лошадь или танцор), который шагает
Примеры предложений
Недавние примеры в Интернете
Рафаэль всегда остается высококлассным степпером .
— Брайан Т. Аллен, National Review , 5 сентября 2020 г.
Новинкой этого года является доступ для всех возрастов к мероприятию, которое включает в себя рассадку в стиле паба, зеленое пиво, традиционные ирландские steppers , кельтские рок-группы, фотосессии, махинации (с призами!) и многое другое в Gaslamp.
— The San Diego Union-Tribune Staff, San Diego Union-Tribune , 15 марта 2023 г.
Wendl был лучшим степпером весной 2020 года.
— Кливленд , 23 ноября 2022 г.
Таким образом, несмотря на то, что технологический слой EUV стоит дороже, чем слой, созданный с помощью иммерсионной литографии, из-за огромных затрат на приобретение и эксплуатацию EUV stepper , стоимость одного технологического слоя EUV меньше, чем пять проходов, необходимых для создания того же слоя на кристалле с помощью иммерсионной литографии.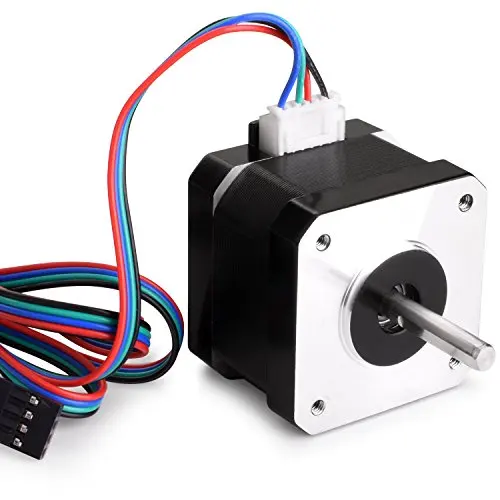
— Стивен Лейбсон, Forbes , 13 июня 2022 г.
От компактных складных тренажеров, которые можно положить под стол или за диван, до очень умных беговых дорожек, которые будут поддерживать вашу мотивацию и связь (и все, что между ними), безусловно, есть степпер 9.0012, который удовлетворит ваши потребности и заставит ваше сердце биться чаще.
— Кристин Гранеро, SELF , 29 ноября 2021 г.
Это если только цель не состоит в том, чтобы получить на открытом воздухе эквивалент тренировки в тренажерном зале с лестницей и шаговым двигателем .
—Маре Чинар, Республика Аризона , 2 марта 2023 г.
Таланты Алабамы будут широко представлены в этих шоу, которые варьируются от классического Бродвея 9 до0011 степпер на радость попугаю.
— Мэри Колурсо | Mcolurso@al.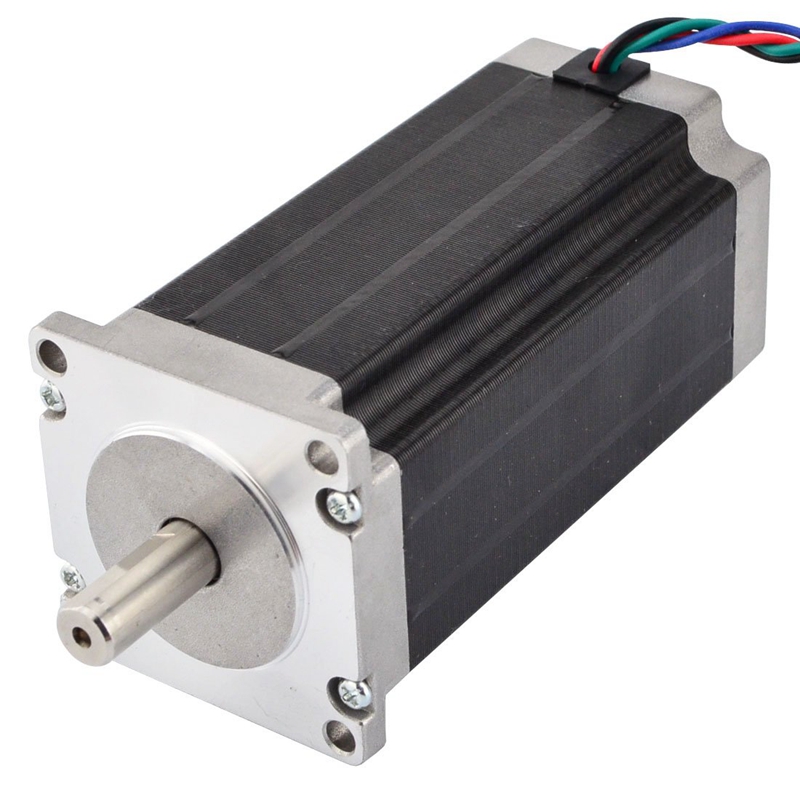 com, al , 7 января 2023 г.
com, al , 7 января 2023 г.
Наступить на чьи-то ботинки — значит вторгнуться в их пространство, их свободу, их самоощущение, и это опасно для степпера .
— Солт-Лейк-Трибьюн , 8 декабря 2022 г.
Узнать больше
Эти примеры программно скомпилированы из различных онлайн-источников, чтобы проиллюстрировать текущее использование слова «степпер». Любые мнения, выраженные в примерах, не отражают точку зрения Merriam-Webster или ее редакторов. Отправьте нам отзыв об этих примерах.
История слов
Первое известное использование
1835, в значении, определенном выше
Путешественник во времени
Первое известное использование степпер был
в 1835 г.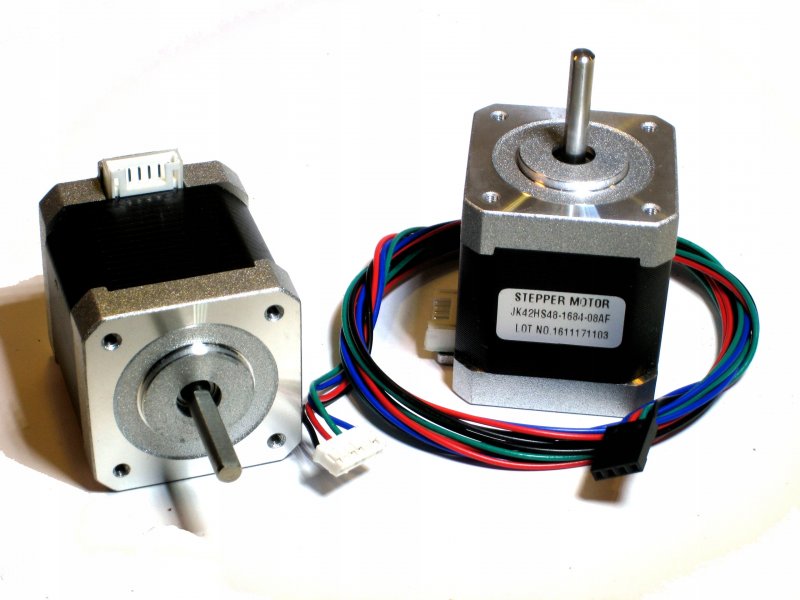
Посмотреть другие слова того же года
Словарные статьи рядом с
stepper
степь
степпер
шаговый двигатель
Посмотреть другие записи поблизости
Процитировать эту запись0003
«Степпер». Словарь Merriam-Webster.com , Merriam-Webster, https://www.merriam-webster.com/dictionary/stepper. По состоянию на 27 апреля 2023 г.
Ссылка на копию
Последнее обновление:
— Обновлены примеры предложений
Подпишитесь на крупнейший словарь Америки и получите тысячи дополнительных определений и расширенный поиск без рекламы!
Merriam-Webster без сокращений
Шаговые двигатели | Коллморген | Шаговый шаг Микрошаговые двигатели Бесколлекторный DC
Шаговые двигатели
делят каждый полный оборот на несколько шагов одинакового размера. Эти двухфазные бесщеточные двигатели постоянного тока, также известные как шаговые или шаговые двигатели, обеспечивают быстрое и точное позиционирование нагрузки и исключительный удерживающий момент на любом из этих шагов приращения. Каждый шаг соответствует 1,8° или 200 шагам на оборот. При использовании микрошагового привода каждый шаг в 1,8° можно разбить на еще меньшие приращения, чтобы добиться производительности позиционирования, близкой к сервоприводу, без необходимости использования сложных устройств обратной связи или системы управления с обратной связью.
Эти двухфазные бесщеточные двигатели постоянного тока, также известные как шаговые или шаговые двигатели, обеспечивают быстрое и точное позиционирование нагрузки и исключительный удерживающий момент на любом из этих шагов приращения. Каждый шаг соответствует 1,8° или 200 шагам на оборот. При использовании микрошагового привода каждый шаг в 1,8° можно разбить на еще меньшие приращения, чтобы добиться производительности позиционирования, близкой к сервоприводу, без необходимости использования сложных устройств обратной связи или системы управления с обратной связью.
Полная линейка продуктов
Шаговые двигатели Kollmorgen используются в приложениях от устройств жизнеобеспечения до высокопроизводительных производственных линий и взрывоопасных сред добычи нефти и газа. Благодаря многолетнему опыту проектирования шаговых двигателей мы разработали широкий спектр серий двигателей, отвечающих потребностям OEM-производителей практически в любой отрасли, где важно движение, независимо от того, требуется ли приложение высокого соотношения цены и качества, превосходной производительности в экстремальных условиях или специальные возможности и подходят.
Высочайшая производительность
Все шаговые двигатели теряют полезный крутящий момент при увеличении скорости вращения. Это известно как спад крутящего момента. Kollmorgen сводит к минимуму падение крутящего момента за счет превосходной оптимизации электромагнитной конструкции. Несколько семейств Stepper также предлагают улучшенную технологию. Усовершенствованные двигатели включают редкоземельный магнит, добавленный в статор двигателя, что приводит к увеличению крутящего момента до 25% во всем диапазоне скоростей.
Благодаря непревзойденному опыту компании Kollmorgen в области движения вы можете достигать более высоких скоростей, сохраняя при этом необходимый крутящий момент. Ваша машина может быть меньше, быстрее, энергоэффективнее и дешевле в сборке и эксплуатации — все это измеримые преимущества по сравнению с машинами, работающими на двигателях конкурентов.
Совместные модификации и изготовление прототипов на заказ
Компания Kollmorgen предлагает огромный выбор стандартных размеров, конструкций, обмоток и опций, включая нестандартные выводы, валы и соединители, а также тысячи стандартных модификаций, которые помогут вам добиться идеального соответствия вашим требованиям. .
.
Кроме того, мы можем сотрудничать с вами для совместной разработки таких функций, как модификации валов и уплотнений, специальные обмотки, специальные кабели и разъемы, встроенные энкодеры и многое другое. Мы даже можем поставлять полностью индивидуальные решения с минимальными дополнительными затратами времени и средств благодаря нашему быстрому прототипированию, оптимизированному производству и глобальному охвату поставок.
Проверенная надежность и поддержка
Сделанные в США, наши усовершенствованные гибридные шаговые двигатели включают в себя большие подшипники, высоковольтную изоляцию, большой диаметр ротора, жесткие допуски на воздушный зазор, а также магниты и обмотки с высокой энергией, которых нет у других производителей. . Эти прочные конструктивные особенности многократно проверены в полевых условиях, обеспечивая длительный и надежный срок службы, на который мы даем двухлетнюю гарантию.
А когда вам понадобится техническая помощь, вы всегда можете рассчитывать на наши инструменты самообслуживания для проектирования и выбора продуктов, опыт инженеров, а также на разработку, производство и поддержку продукта в регионе.
Серия PMX >
Семейство гибридных шаговых двигателей PMX предлагает непревзойденную универсальность благодаря широкому спектру стандартных и настраиваемых опций, непревзойденную ценность благодаря исключительной производительности по доступной цене и непревзойденную надежность благодаря превосходному опыту компании Kollmorgen в области управления движением и качеству сборки.
Серии POWERMAX M и P >
Шаговые двигатели POWERMAX II® серий M и P, соответствующие стандарту NEMA 23, имеют восьмиугольный корпус и доступны в конфигурациях с половинным, одинарным и двумя пакетами. Эти устройства предлагают широкий спектр стандартных опций и доступных модификаций, разработанных совместно, без ущерба для масштабируемости и времени выполнения заказа.
POWERPAC Серии K и N >
Серия POWERPAC включает прочные гибридные шаговые двигатели NEMA 34 и 42, разработанные для достижения чрезвычайно высокого крутящего момента. Эти блоки доступны со стандартными опциями и совместно разработанными модификациями, чтобы обеспечить точное соответствие условиям применения.
Всего комментариев: 0