Шаговый мотор: Купить шаговый электродвигатель по доступным ценам. Шаговый электродвигатель купить
Содержание
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом.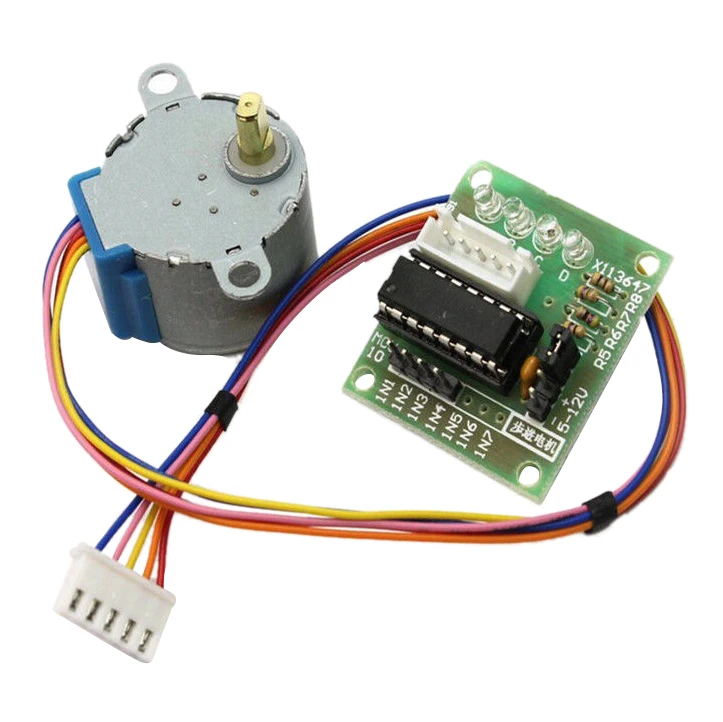 Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью.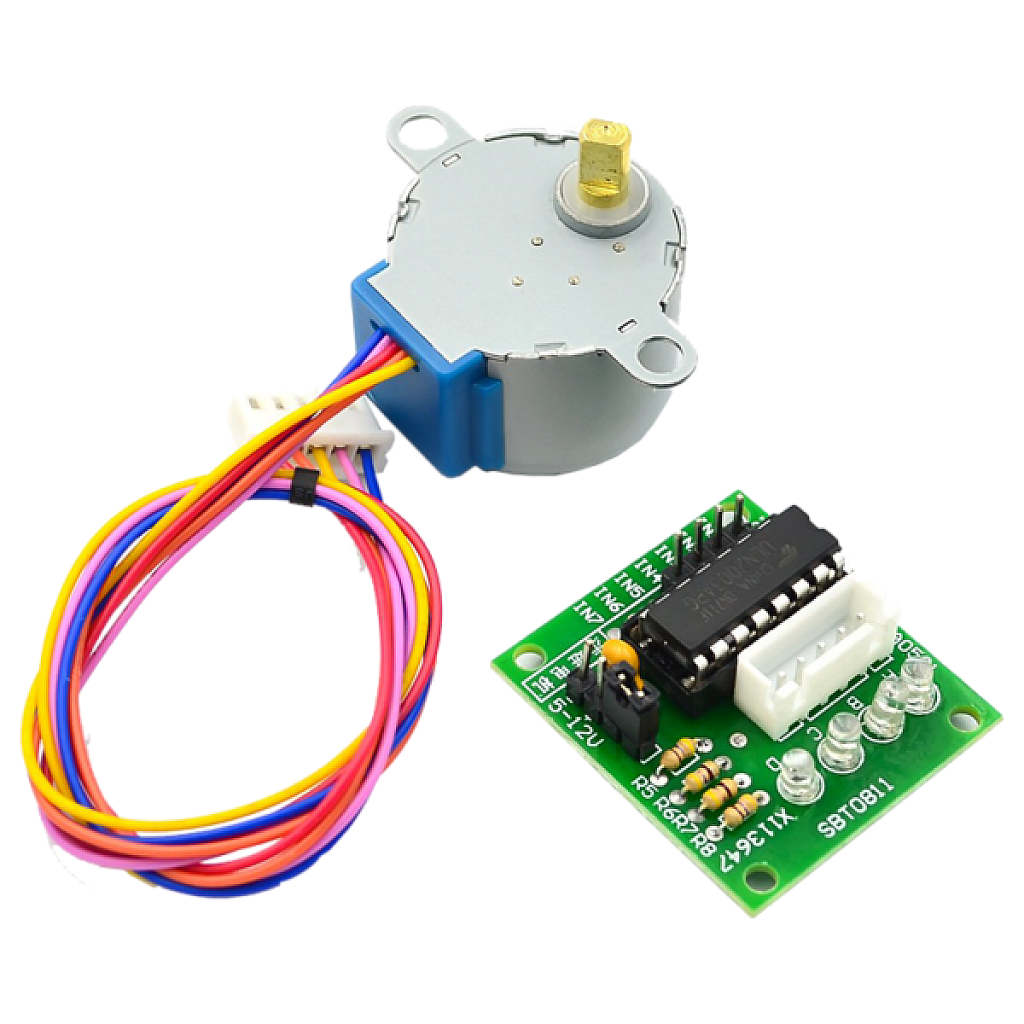 Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость.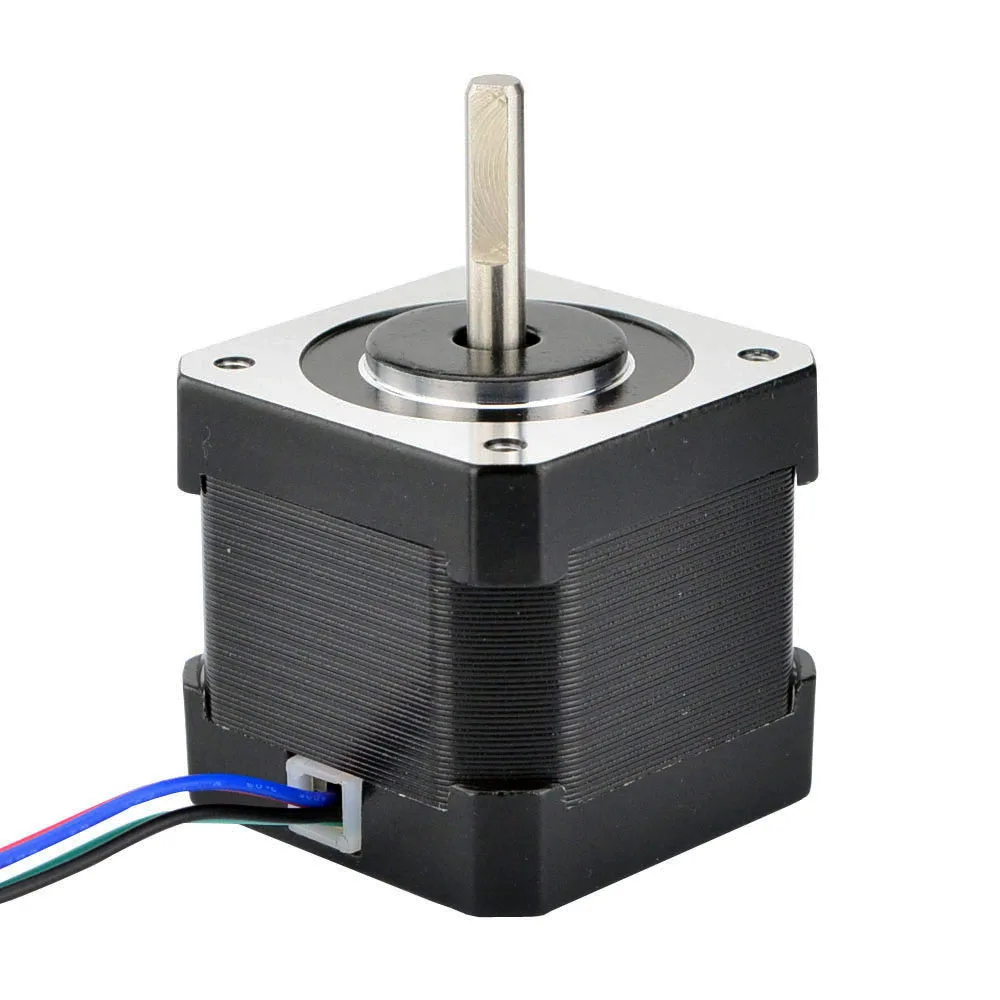 При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
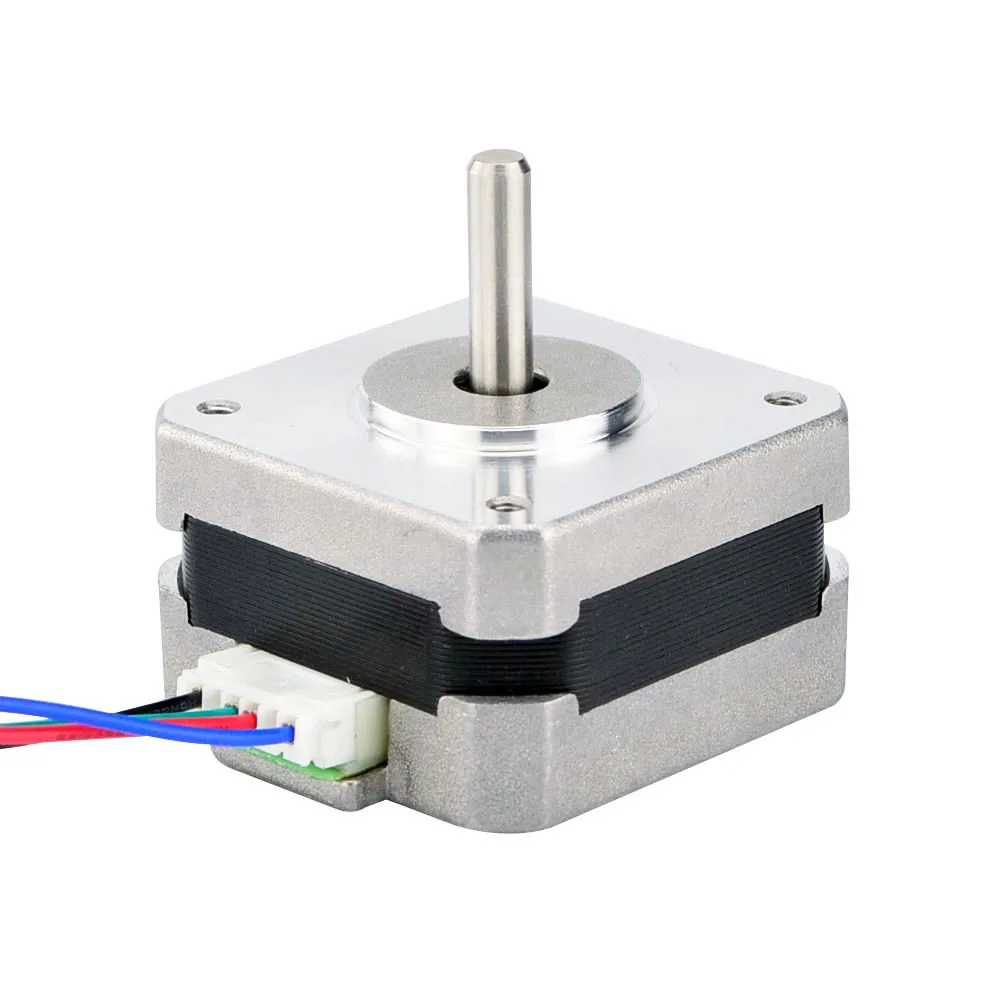
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Шаговый двигатель — принцип работы, применение, виды, характеристики, особенности, конструкции
Главная
/ Реестр
/ Что такое шаговый двигатель, конструкция, где применяется?
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S.
 Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя. - Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.

Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции.
 Величина сопротивления между корпусом и обмотками;
Величина сопротивления между корпусом и обмотками; - момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Твитнуть
Поделиться
Поделиться
Плюсануть
Класснуть
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулированием скорости
Информация о продукте
Решения
Техническая информация
Размер двигателя
Загрузки
Виртуальный выставочный зал
Свяжитесь с нами
αSTEP
Шаговые двигатели
Бесщеточные двигатели постоянного тока
Серводвигатели
Редукторные двигатели переменного тока
Линейные приводы
Поворотные приводы
Сетевые продукты
Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Принять условия.
Шаговые двигатели
Шаговые двигатели позволяют с легкостью выполнять точное позиционирование. Они используются в различных типах оборудования для точного регулирования угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели с компактным корпусом генерируют высокий крутящий момент и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также удерживают свое положение при остановке благодаря своей механической конструкции. Решения для шаговых двигателей состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Компания Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей с входом переменного или постоянного тока
- Размеры корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее. ..
..
- Шаговые двигатели (только двигатель)
- Драйверы шаговых двигателей
- Шаговые двигатели с регулированием скорости
- Контроллеры
Шаговые двигатели (только двигатель)
Компания Oriental Motor предлагает широкий ассортимент шаговых двигателей, в том числе; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны с размерами корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- Шаговые двигатели 0,79–3,54 дюйма (20–90 мм) NEMA 8–NEMA 34 типоразмера корпуса
- Доступны беззазорные, малозазорные и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, двухфазные шаговые двигатели и пятифазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
- αSTEP Шаговые двигатели с замкнутым контуром
- 2-фазные шаговые двигатели
- 5-фазные шаговые двигатели
Драйверы шаговых двигателей
Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Шаговые двигатели с замкнутым контуром AlphaStep, драйверы двухфазных или пятифазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet/IP™, EtherCAT, PROFINET Совместимые версии
- Плата или коробка Тип
- αSTEP Драйверы с обратной связью
- 2-фазные драйверы
- 5-фазные драйверы
EtherNet/IP™ является товарным знаком ODVA
Шаговые двигатели и драйверы для управления скоростью
Система управления скоростью серии SC предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера. Рабочая скорость, время разгона и торможения, рабочий ток могут быть установлены с помощью переключателей драйвера, а простое переключение входа FWD (RVS) в положение ON или OFF обеспечивает простоту управления.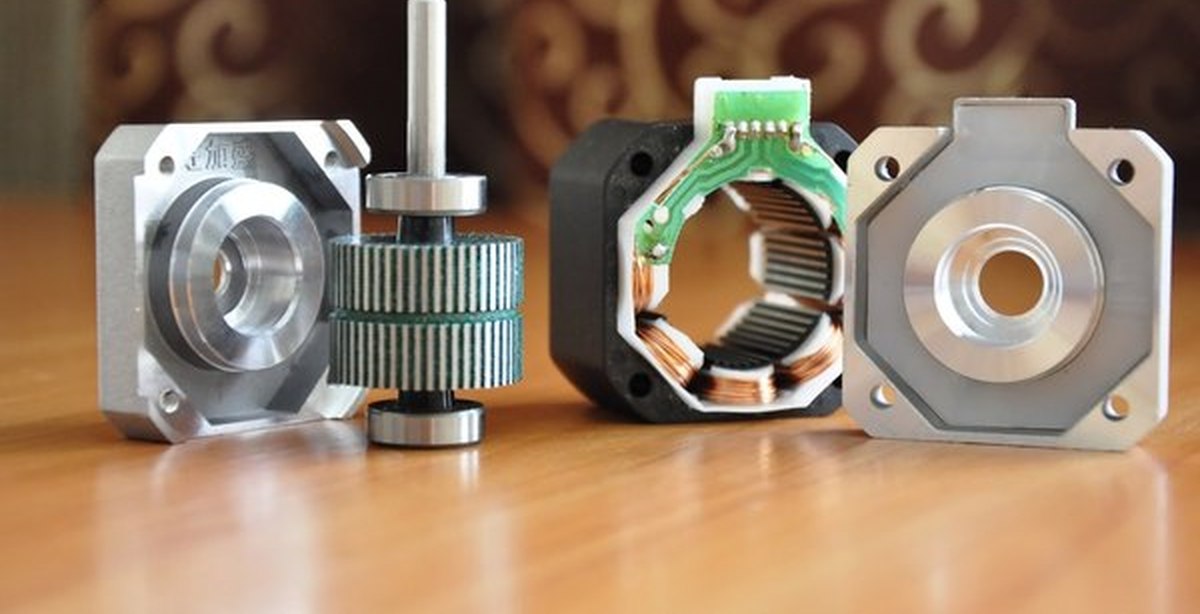
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры/сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- Сетевые преобразователи/шлюзы (связь RS-485)
- EtherCat
- CC-Link
- МЕХАТРОЛИНК
- Контроллеры
- Сетевые шлюзы
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальных вибрациях идеально подходят для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Точное позиционирование с точным шагом
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «базовым углом шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36°, 0,72°, 0,9° и 1,8°. 5-фазные шаговые двигатели имеют угол шага 0,36° и 0,72°, а 2-фазные шаговые двигатели имеют угол шага 0,9° и 1,8°.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс. Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Ниже показана конфигурация системы для высокоточного позиционирования. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого постоянно меняется между ON и OFF. Каждый цикл ВКЛ/ВЫКЛ считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя провернуться на один шаг. Уровни сигналов, соответствующие состояниям ВКЛ и ВЫКЛ напряжения, обозначены как «H» и «L» соответственно.
Количество оборотов пропорционально количеству импульсов
Количество оборотов шагового двигателя пропорционально количеству импульсных сигналов (число импульсов), подаваемых драйверу. Соотношение вращения шагового двигателя (угол поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоте импульсов), подаваемых на драйвер.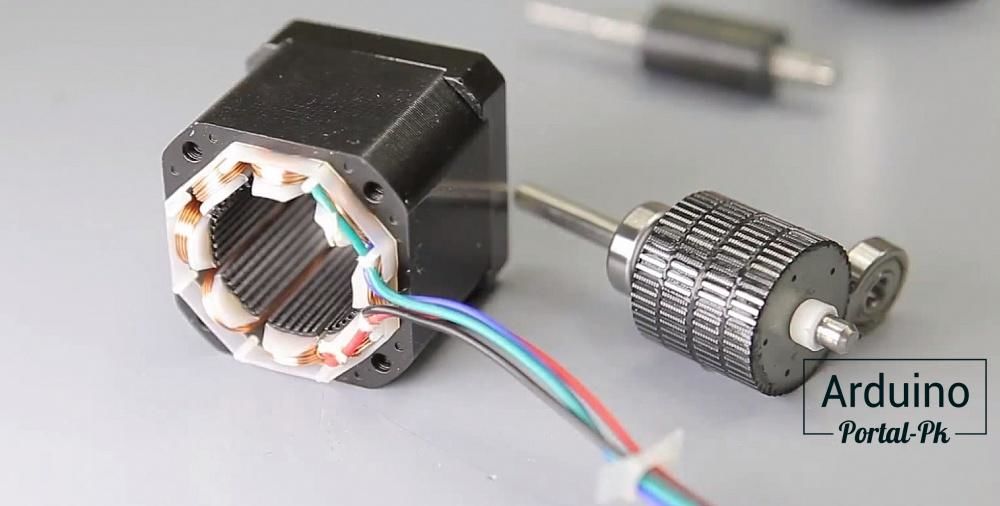 Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Создание высокого крутящего момента в компактном корпусе
Шаговые двигатели генерируют высокий крутящий момент в компактном корпусе. Эти особенности обеспечивают им превосходное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высоким крутящим моментом, где двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживает себя в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя. Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания крутящий момент самоудержания двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для максимального использования возможностей шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выдавать сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Узнайте больше о наших продуктах AlphaStep
Типы операционных систем
Каждый шаговый двигатель и драйвер сочетают в себе шаговый двигатель различных типов со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные вводятся в генератор импульсов заранее. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит рабочую команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем с помощью непосредственно подключенного персонального компьютера или программируемого контроллера. Так как не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают проводку.
Разница между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и приводных системах на 100–115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока (некоторые продукты являются исключением из этого правила).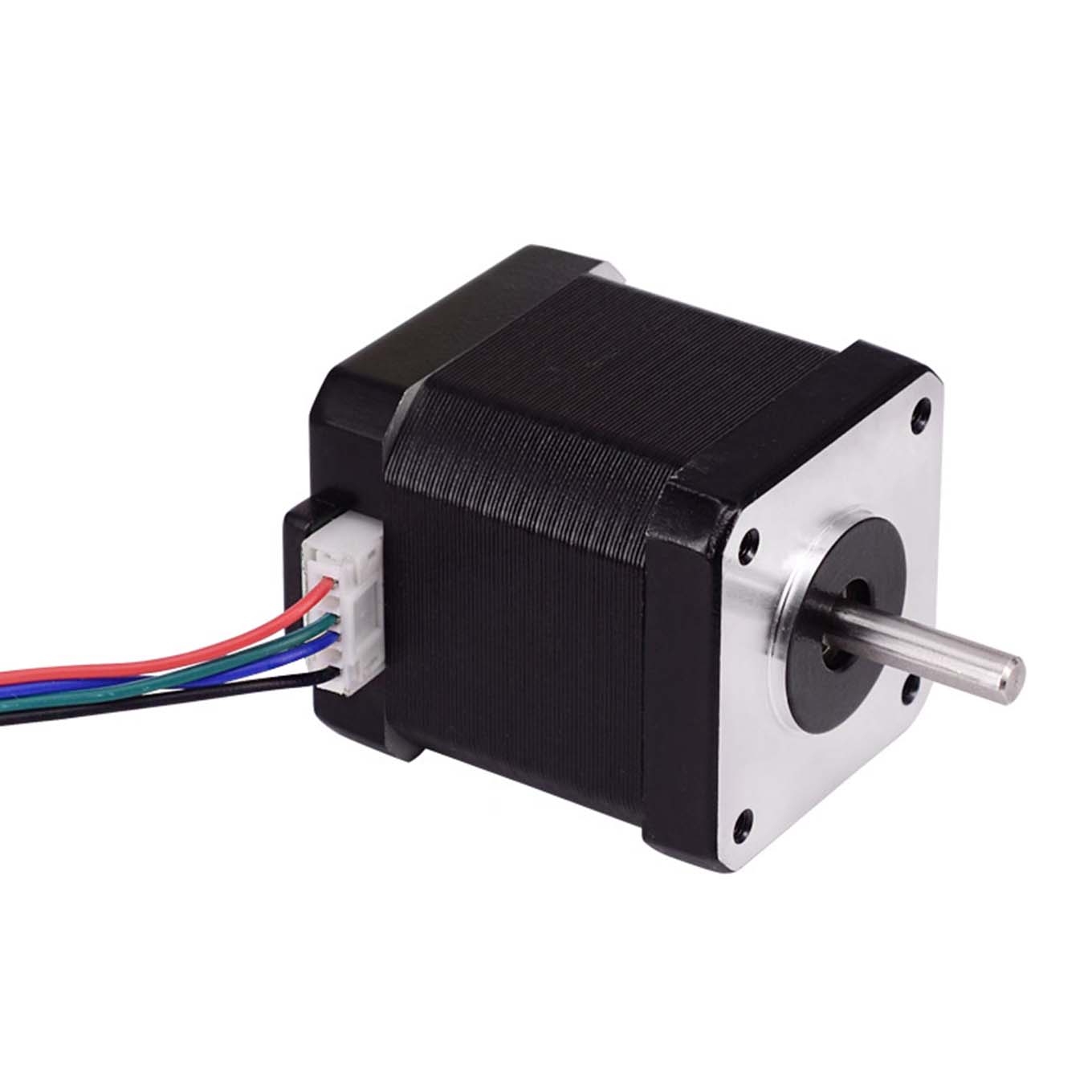
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, двигатель переменного тока и система драйвера имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое передаточное число.
Рекомендуется, чтобы для вашего приложения рассматривались системы двигателя и драйвера с входом переменного тока, которые совместимы в более широком диапазоне условий эксплуатации, чем системы с входом постоянного тока.
- Поиск по артикулу
- Слайд с содержанием
- Слайд с содержанием
Шаговые двигатели — все, что вам нужно знать о шаговых двигателях
Скачать PDF
Мощные возможности высоконадежных шаговых двигателей задуман как меньший из серводвигателей, но как На самом деле, они очень надежны, как и серводвигатели.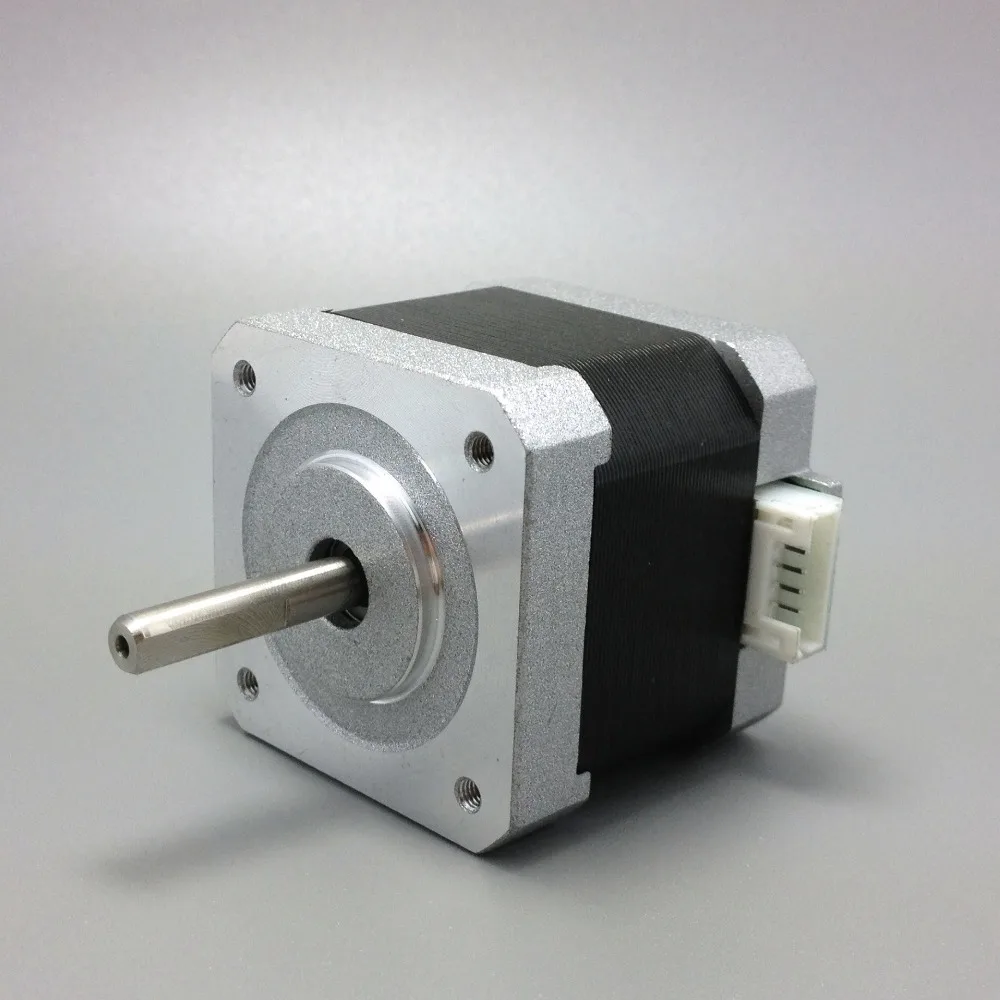 Двигатель работает за счет точной синхронизации с выходным сигналом импульса от контроллера к приводу, обеспечивая высокоточное позиционирование и управление скоростью. Шаговые двигатели обладают высоким крутящим моментом и низкой вибрацией на низких скоростях, что идеально подходит для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Двигатель работает за счет точной синхронизации с выходным сигналом импульса от контроллера к приводу, обеспечивая высокоточное позиционирование и управление скоростью. Шаговые двигатели обладают высоким крутящим моментом и низкой вибрацией на низких скоростях, что идеально подходит для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Все, что вам нужно знать о шаговых двигателях
«Шаговые двигатели? Серводвигатели должны иметь лучшую производительность». Это типичный ответ на вопрос о шаговых двигателях. Очевидно, существует серьезное заблуждение о шаговых двигателях. Фактически, шаговые двигатели использовались в различных приложениях, таких как передовое оборудование и доступные автоматизированные инструменты. В этой статье объясняются причины постоянного выбора шаговых двигателей. Некоторые читатели могут сказать, что никогда раньше не видели шагового двигателя. Шаговые двигатели используются во многих приложениях и отраслях промышленности в качестве приводных систем, требующих высокоточного управления, таких как автоматизация производства (FA), производственное оборудование для полупроводников, ПФД и солнечных панелей, медицинские устройства, аналитические приборы, прецизионные столики, финансовые системы, машины для упаковки пищевых продуктов и регулировка апертурной диафрагмы для камер.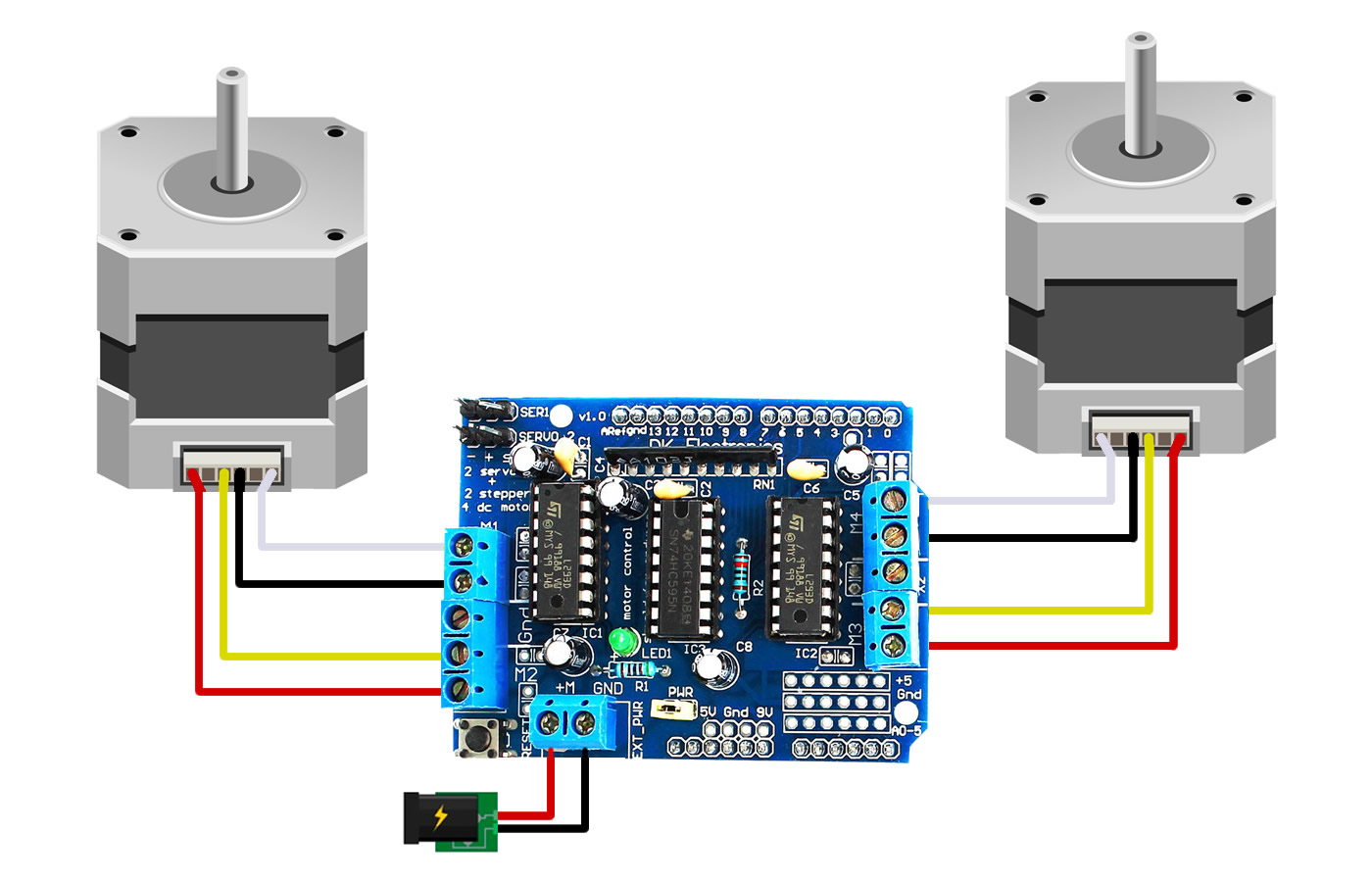
Почему вы используете шаговый двигатель?
Простота использования: 34%
Недорого: 17%
Простота эксплуатации: 16%
Нет необходимости в настройке: 12%
Другое: 21%
Ключевые моменты: простота использования, простые операции и низкая стоимость
Согласно опросу пользователей шаговых двигателей, многие отдают предпочтение шаговым двигателям из-за их «простоты использования», «простых операций» и «низкой стоимости». «вытекает из структуры и конфигурации системы. Вполне логично, что многие пользователи находят в шаговых двигателях такие положительные стороны благодаря простой структуре и конфигурации системы. Однако некоторые читатели могут скептически относиться к реальным характеристикам двигателя с точки зрения его точности и крутящего момента. Нелегко полностью понять всю идею, если нет примеров сравнения с другими управляющими двигателями, такими как серводвигатели. Зная характеристики и применяя различные подходы в зависимости от требуемых операций, шаговые двигатели, безусловно, могут снизить стоимость оборудования.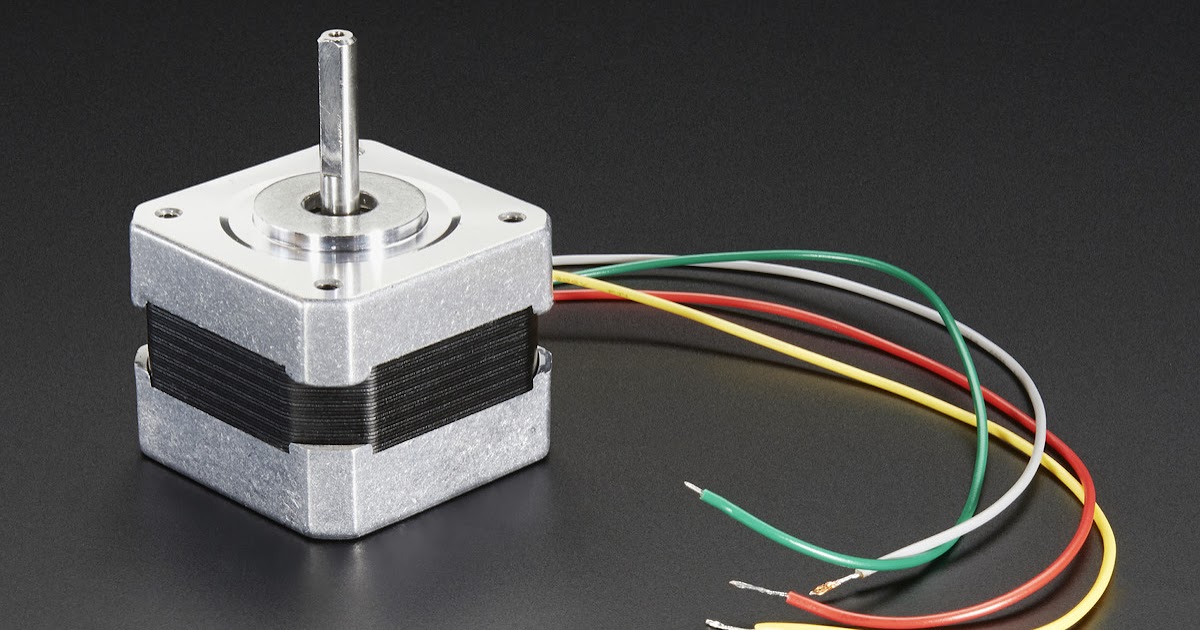 Характеристики и техническая информация шаговых двигателей поясняются ниже:
Характеристики и техническая информация шаговых двигателей поясняются ниже:
Впечатляющая «Точность остановки». Быстро перемещается в «диапазоне низких/средних скоростей»
Шаговые двигатели обладают замечательной точностью остановки, и возможно точное управление с разомкнутым контуром. Например, при использовании серии RK II для позиционирования поворотного стола точность его остановки составляет ±0,05° (без нагрузки). Поскольку ошибки положения остановки не накапливаются между шагами, возможно позиционирование с высокой точностью. Конструкция шагового двигателя, не требующая энкодера, обеспечивает простую систему привода и низкую стоимость.
Точка 1
Фантастическая точность остановки
Например, при преобразовании точности остановки ±0,05° шагового двигателя в шарико-винтовой механизм:
Условия эксплуатации:
• Двигатель: серия RK II
• Ход шарико-винтовой передачи : 10 мм
Точность остановки: ±1,4 мкм
Обычно точность шлифованных шариковинтовых пар составляет ±10 мкм.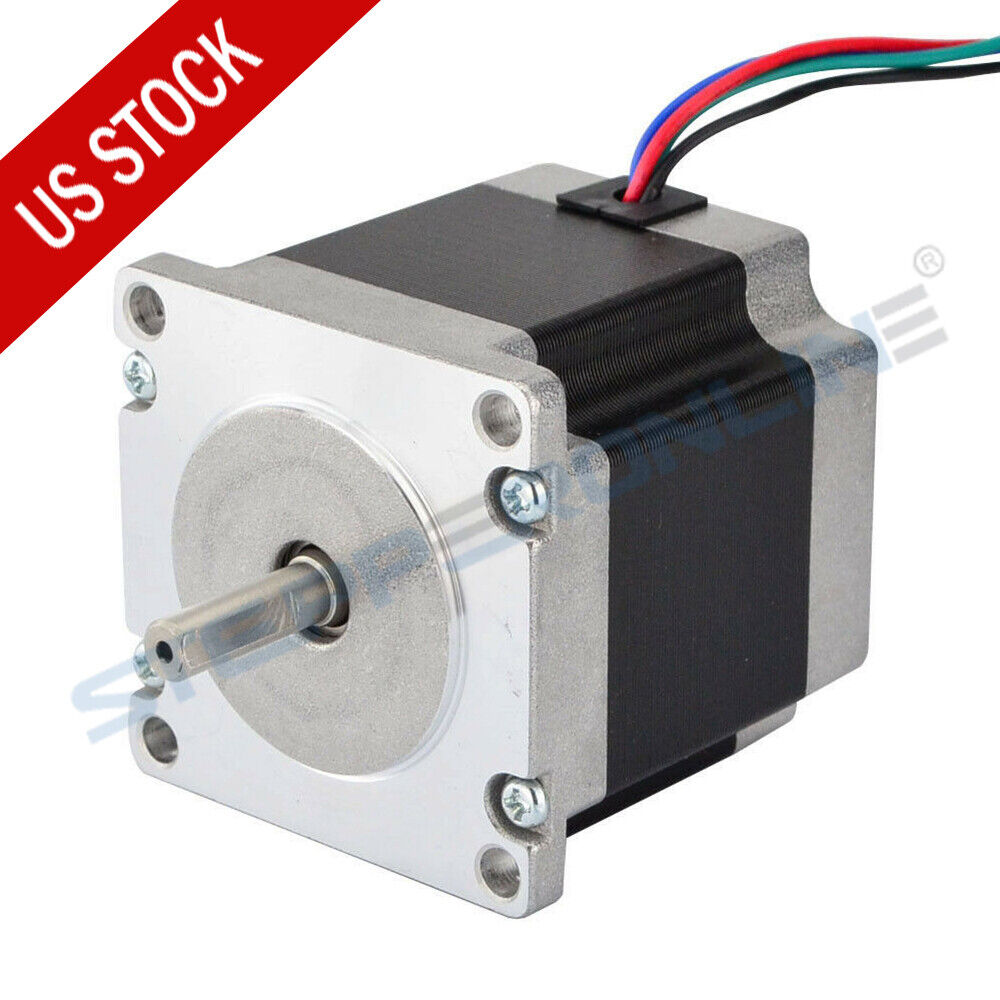 При использовании катаного шарико-винтовой передачи его точность снижается до ±20 мкм, что указывает на то, что точность остановки шагового двигателя намного выше, чем у шарико-винтовых передач.
При использовании катаного шарико-винтовой передачи его точность снижается до ±20 мкм, что указывает на то, что точность остановки шагового двигателя намного выше, чем у шарико-винтовых передач.
Высокий крутящий момент в диапазоне низких/средних скоростей — еще одна замечательная особенность шаговых двигателей. Одной из основных особенностей серводвигателей является создание постоянного крутящего момента в диапазоне средних и высоких скоростей. Серводвигатели подходят для операций с длинным ходом (много оборотов). С другой стороны, характеристики крутящего момента шаговых двигателей не являются плоскими. Кривая крутящего момента в диапазоне низких/средних скоростей становится очень высокой, а в диапазоне высоких скоростей становится очень низкой. Помимо стабильного вращения в диапазоне низких скоростей, с которым борются серводвигатели, шаговые двигатели могут обеспечивать высокий крутящий момент в требуемом диапазоне скоростей для операций с коротким ходом (меньшее количество оборотов), поэтому они подходят для выбора желаемого угла шага для многократного вращения. таблицы и толчковые приложения. Это происходит из-за короткого времени позиционирования при работе с коротким ходом, поэтому двигатель замедляется и останавливается до достижения максимальной скорости. Иными словами, скоростные характеристики обычно не требуются.
таблицы и толчковые приложения. Это происходит из-за короткого времени позиционирования при работе с коротким ходом, поэтому двигатель замедляется и останавливается до достижения максимальной скорости. Иными словами, скоростные характеристики обычно не требуются.
Высокая скорость отклика и отличная синхронизация
Третьей замечательной особенностью шаговых двигателей является быстродействие. Управление без обратной связи, которое отправляет односторонние команды двигателю, имеет высокий механизм отслеживания команд. В то время как серводвигатели, которые ожидают обратной связи от энкодера, как правило, имеют «задержки» с командами, шаговые двигатели работают синхронно с импульсом. Таким образом, очень мало «задержек», что приводит к отличному отклику. По этой причине шаговые двигатели подходят для приложений, требующих синхронной работы нескольких двигателей. Одним из примеров является приложение для перемещения досок, в котором требуется два конвейера с одним двигателем, установленным соответственно, для перемещения досок между двумя конвейерами.
Точка 2
Отличный диапазон низких/средних скоростей!
Пример: Крутящий момент двигателя с размером корпуса 85 мм эквивалентен номинальному крутящему моменту серводвигателя мощностью 400 Вт при 1000 об/мин.
Крутящий момент в еще более низком диапазоне скоростей может быть до 5 раз выше. Для позиционирования на коротких дистанциях важно иметь высокий крутящий момент в диапазоне низких/средних скоростей.
Точка 3
Высокая Оперативность!
Подходящие области применения
Помимо толчкового режима с частыми пусками и остановами, шаговые двигатели подходят для позиционирования процессоров проверки изображений, которые не любят вибраций, кулачковых приводов, которые трудно регулировать с помощью серводвигателей, и механизмов с низкой жесткостью, таких как как ременная передача. Кроме того, стоимость значительно снижается за счет замены шарико-винтовой передачи на ременную.
Преимущество великолепных характеристик
Помимо снижения затрат, шаговые двигатели имеют много преимуществ с точки зрения производительности. На следующей диаграмме показано преобразование крутящего момента примера серии RKII в крутящий момент типичных диапазонов мощности сервоприводов. Ниже приводится подробная информация о шаговых двигателях, такая как базовая структура, система и примеры приложений, для получения дополнительной информации о шаговых двигателях.
На следующей диаграмме показано преобразование крутящего момента примера серии RKII в крутящий момент типичных диапазонов мощности сервоприводов. Ниже приводится подробная информация о шаговых двигателях, такая как базовая структура, система и примеры приложений, для получения дополнительной информации о шаговых двигателях.
Основы шаговых двигателей
Принцип работы и структура
Шаговый двигатель вращается с фиксированным шагом, как секундная стрелка часов. Высокоточное позиционирование может быть выполнено с управлением без обратной связи благодаря механической конструкции внутри двигателя.
Точное позиционирование (количество шагов)
При полном управлении вращением и скоростью простая конструкция шаговых двигателей достигается без использования электрических компонентов, таких как энкодер внутри двигателя. По этой причине шаговые двигатели очень прочны и имеют высокую надежность с очень небольшим количеством отказов. Что касается точности остановки, ±0,05° (без учета кумулятивных погрешностей тангажа) является очень точным.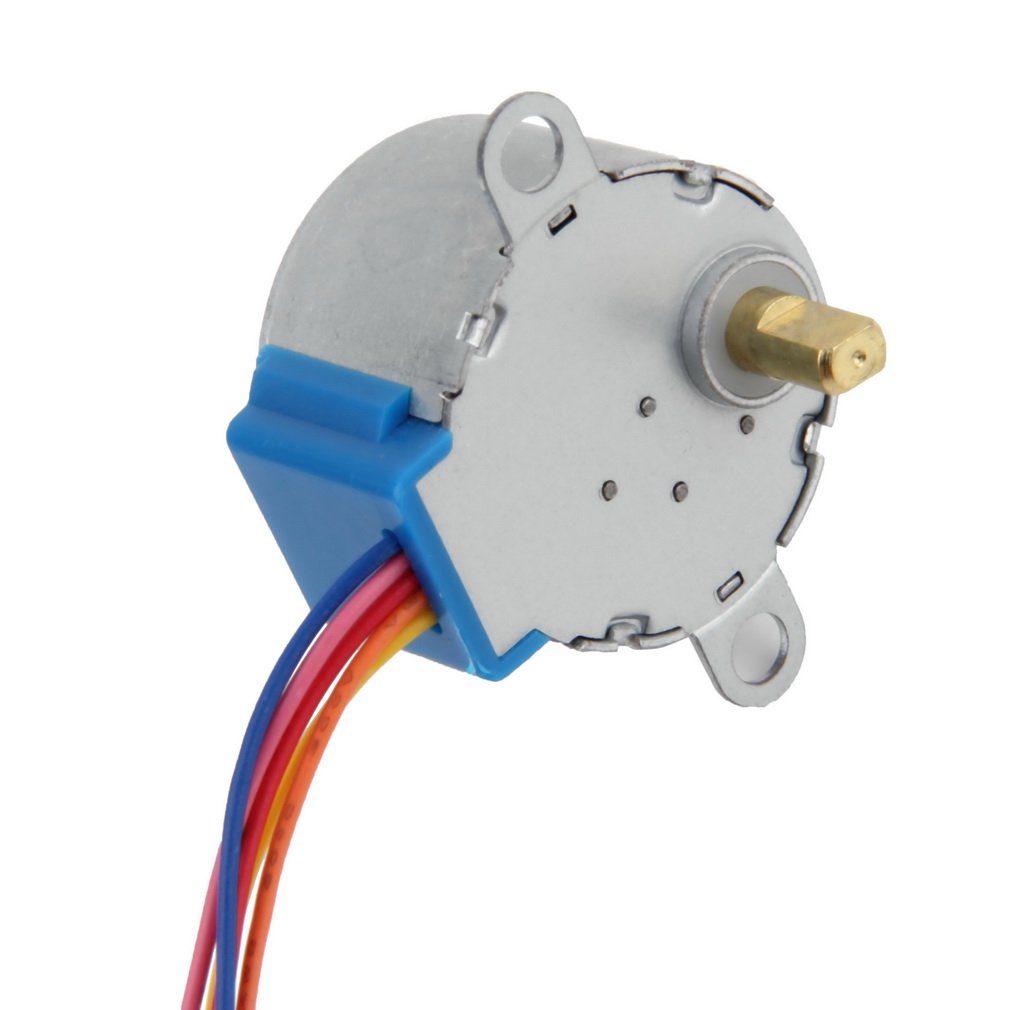 Поскольку позиционирование шаговых двигателей осуществляется с помощью управления без обратной связи и управляется намагниченным статором и магнитным ротором с маленькими зубьями, шаговые двигатели имеют более высокий механизм отслеживания команд, чем у серводвигателей. Кроме того, при остановке шаговых двигателей не происходит рывков. Они также отлично подходят для ременных передач, которые имеют низкую жесткость.
Поскольку позиционирование шаговых двигателей осуществляется с помощью управления без обратной связи и управляется намагниченным статором и магнитным ротором с маленькими зубьями, шаговые двигатели имеют более высокий механизм отслеживания команд, чем у серводвигателей. Кроме того, при остановке шаговых двигателей не происходит рывков. Они также отлично подходят для ременных передач, которые имеют низкую жесткость.
Полезно для управления скоростью и положением
Когда импульсы вводятся в драйвер через генератор импульсов, шаговые двигатели позиционируются в соответствии с количеством входных импульсов. Базовый угол шага 5-фазных шаговых двигателей составляет 0,72° и 1,8° для 2-фазных шаговых двигателей. Скорость вращения шагового двигателя определяется скоростью частоты импульсов (Гц), заданной драйверу, и можно свободно изменять скорость вращения двигателя, просто изменяя количество входных импульсов или частот драйвера. Шаговые двигатели служат не только в качестве двигателей управления положением, но и в качестве двигателей управления скоростью с высокой синхронизацией.
Шаговые двигатели Применение:
• Высокочастотное повторяющееся позиционирование с фиксированными углами шага
• Позиционирование, требующее длительного времени остановки из-за регулировки ширины и т. д.
• Колеблющиеся нагрузки и изменяющаяся жесткость
• Позиционирование, которое делится на 1 цикл
• Двигатель валы, требующие синхронной работы
Операционная система
Простое управление без датчика или обратной связи
Поскольку можно выполнять точное позиционирование и управление положением при синхронизации с количеством командных импульсов и скоростью, нет необходимости в устройствах , такие как датчик, для позиционирования. Таким образом, вся система проста в построении. Если расширенное управление, такое как операция интерполяции, не требуется, рекомендуется использовать встроенный драйвер функционального типа контроллера. Стоимость снижается за счет отказа от контроллеров, таких как генератор импульсов и модули позиционирования ПЛК.
Встроенный датчик с замкнутым контуром
Хотя позиционирование с высокой точностью возможно при управлении без обратной связи, что произойдет, если возникнет проблема? Чтобы избежать таких ловушек, можно использовать двигатель типа энкодера или встроенный датчик с замкнутым контуром управления (серия AR).
Можно ли дополнительно снизить стоимость?
Общая проблема среди инженеров-конструкторов — снижение затрат. Неужели нет возможности еще больше снизить стоимость? Чтобы выяснить, было ли проведено испытание на снижение затрат с улучшением технических характеристик на основе шарико-винтового механизма. Ниже поясняются детали теста:
Миссия
Механизм линейного перемещения
1. Дальнейшее увеличение скорости
2. Дальнейшее снижение стоимости
[Состояние первоначально запланированного оборудования] Механизм: ШВП + серводвигатель шага, показанные справа, определяются на основе серводвигателя, прикрепленного с помощью шарико-винтовой пары и стальной пластины.
План
Замена механизма на ременный шкив
• Шарико-винтовая передача при попытке увеличить скорость => Ременной механизм может быть более подходящим => 1000 мм/сек до 1500 мм/сек возможна с ременным механизмом. Замените на ремень, если нет проблем с точностью позиционирования. • Значительно снизить стоимость, если возможен переход на ремень => Ремень стоит недорого, но его низкая жесткость может повлиять на стабильность работы серводвигателя даже при автоматической настройке.
Проблемы
1. Разница в точности остановки между винтом и лентой… Какая требуется точность остановки?
2. Влияние низкой жесткости… Влияние на время установления, устранение проблем с настройкой
• Лучшая точность остановки с помощью винта. На ремень поменять не проблема? => Требуемая точность остановки приложения составляет ± 0,05 ~ 0,1 мм, что не так точно, как для винта. Поэтому с заменой ремня все в порядке.
• При переходе на ремень жесткость механизма снижается, поэтому движения серводвигателя становятся нестабильными. => Среди двигателей позиционирования шаговые двигатели не имеют встроенного энкодера. По этой причине они не требуют регулировки и обладают низкой жесткостью. Их движения стабильны независимо от колеблющихся нагрузок. Если выход одинаковый, рассмотрите шаговые двигатели.
Оценка
Механизм: Ременный шкив + Двигатель: Попробуйте с шаговым двигателем
• Транспортируемая масса -> Макс. допустимая нагрузка 7 кг • Скорость передвижения -> Увеличена до 800 мм/с Двигатель => Замена шагового двигателя на серводвигатель снижает затраты на 50%! Механизм => Заменив шарико-винтовой механизм на ременный, стоимость снижена на 7%!
Результаты
Было много возможностей для снижения затрат!
Проведя проверку механизма с нуля, а также выбрав двигатель на основе характеристик, нам удалось улучшить технические характеристики и снизить стоимость, даже несмотря на то, что размер двигателя стал немного больше. В прошлом выбор двигателя производился на основе его простоты использования или знакомства с ним. После этого упражнения стали ясны различия в работе серводвигателей и шаговых двигателей. Удивительно, что шаговые двигатели оказались более доступными, чем ожидалось. Должны быть возможности для снижения стоимости других устройств, использующих этот метод. Это упражнение еще раз подтвердило, что хорошо сбалансированный выбор между техническими характеристиками двигателя и его стоимостью при максимальном увеличении характеристик двигателя является ключевым.
В прошлом выбор двигателя производился на основе его простоты использования или знакомства с ним. После этого упражнения стали ясны различия в работе серводвигателей и шаговых двигателей. Удивительно, что шаговые двигатели оказались более доступными, чем ожидалось. Должны быть возможности для снижения стоимости других устройств, использующих этот метод. Это упражнение еще раз подтвердило, что хорошо сбалансированный выбор между техническими характеристиками двигателя и его стоимостью при максимальном увеличении характеристик двигателя является ключевым.
Что имеет более высокую точность остановки — шаговый двигатель или серводвигатель?
Запрос клиента: Ищет двигатель с хорошей точностью остановки. Насколько велика разница между шаговыми двигателями и серводвигателями?
Предположение: Серводвигатель переменного тока серии NX оснащен 20-битным энкодером, поэтому он должен иметь высокое разрешение и хорошую точность остановки.
Во-первых, необходимо уточнить разницу между разрешением и точностью остановки: Разрешение — это количество шагов на один оборот, его также называют углом шага для шаговых двигателей. Это необходимо при рассмотрении того, насколько точным должно быть требуемое позиционирование. Точность остановки — это разница между фактической позицией остановки и теоретической позицией остановки.
Означает ли это, что серводвигатель переменного тока, оснащенный высокоточным энкодером, имеет лучшую точность остановки, чем шаговые двигатели?
Не совсем. В прошлом не было проблем с концепцией «точность остановки серводвигателей, равная разрешению энкодера в пределах ± 1 импульса». Однако современные серводвигатели оснащены 20-битным энкодером (1 048 576 шагов) с очень высоким разрешением. Из-за этого ошибки из-за точности установки энкодера имеют огромное влияние на точность остановки. Поэтому понятие точности остановки немного начало меняться.
Согласно сравнительным таблицам, точность остановки шаговых двигателей и серводвигателей переменного тока почти одинакова (±0,02º ~ 0,03º).
Всего комментариев: 0