Конструкция робота: Конструкция промышленного робота. Устройство промышленных роботов. Датчики промышленных роботов.
Содержание
Механизмы и конструкции роботов
Роботами называются автоматические машины, которые могут быть или стационарными, или передвижными, и спроектированы по образу и подобию различных живых организмов.
С точки зрения своей конструкции они являются весьма сложными механизмами, в которых на практике реализовываются достижения технического прогресса в таких областях, как электроника, точная механика, оптика, пневмоавтоматика и многое другое.
В практике современного производства роботы используются для того, чтобы осуществлять различные операции по тем программам, которые в них заложены, и которые в большинстве случаев выполняются людьми.
Конструкции роботов
Одной из важнейших характеристик роботов является то, что они оснащены всевозможными датчиками с которых снимается информация о внешней среде и в зависимости от результатов обработки этих данных, корректируют свои действия.
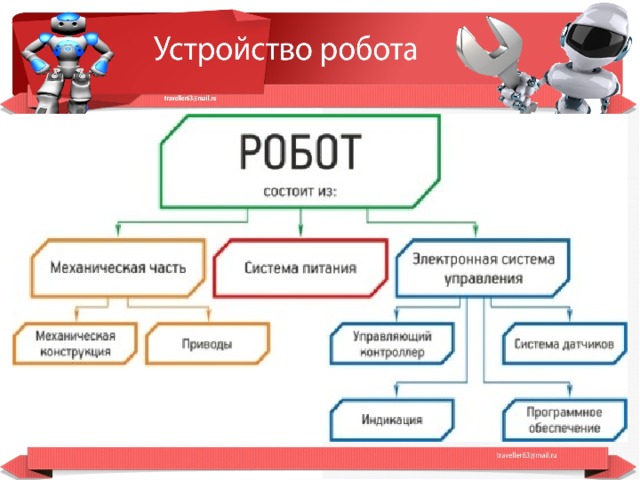
В большинстве случаев роботы состоят из таких частей, как манипуляторы, имеющие несколько степеней свободы, специальных приводов, обеспечивающих их передвижение в пространстве, а также перепрограммируемых устройств управления.
В общем и целом можно считать, что любой современный робот представляет собой ни что иное, как единый, нацеленный на выполнение определенных функций, механизм, состоящее из определенных блоков, каждый из которых имеет свое собственное функциональное назначение.
Несущий корпус робота
Тем основным элементом, в котором располагаются все остальные детали и механизмы любого робота, является его корпус. В большинстве случаев он является также несущей, силовой составляющей всей конструкции, которая предназначается для того, чтобы обеспечить необходимое взаимное расположение всех электрических, кинематических и других звеньев механизмов роботов. Помимо этого корпус во многих случаях является защитой их от воздействия неблагоприятных внешних факторов окружающей среды, повреждений механического характера и т.п. Он может быть как внешним, так и внутренним, и во втором случае он именуется каркасом.
Как правило, корпуса современных роботов изготавливаются из таких материалов, как нержавеющая или обычная конструкционная сталь, а также пластмассы и алюминиевые сплавы.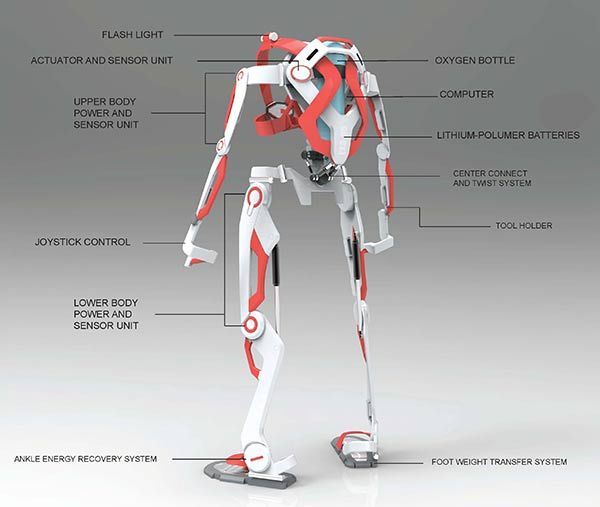 Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Валы и оси роботов
В современных механизмах роботов широко используются такие детали, как оси, валы, втулки, штоки, шестерни, цилиндры, рычаги и кулачки.
Для изготовления штоков, осей и валов механизмов роботов используются чаще всего стали Ст40 и Ст45, а также легированные стали 1Х18Н9Т и 40Х. Кроме того, в отдельных случаях они вытачиваются из цветных сплавов. Эти изделия согласно действующим техническим требованиям, по такому параметру, как точность посадочных цилиндрических поверхностей должны соответствовать 6 – 9 квалитету, а в отдельных случаях – 5 квалитету.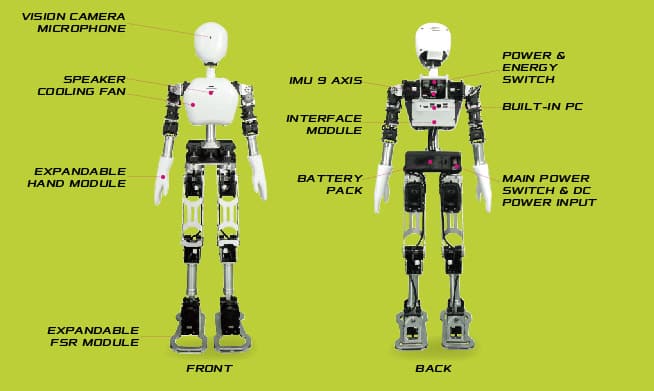
Оси и валы механизмов роботов служат для того, чтобы на них устанавливать шкивы, звездочки цепных передач, зубчатые колеса и другие детали вращения. При этом валы, вращаясь, транслируют крутящий момент, а оси, в отличие от них, могут быть как подвижными, так и неподвижными.
И оси, и валы являются широко распространенными элементами, используемыми в конструкции современных роботов. Основной сферой применения осей является соединение рабочих элементов, которые входят в состав механических захватных устройств. Помимо этого они являются наиболее типичными компонентами практически всех механизмов роботов.
Опоры для вращательного и поступательного движения
В качестве опор для валов и осей, которые имеются в конструкции механизмов роботов, служат подшипники. В зависимости от того, какая именно нагрузка на них оказывается, они могут быть упорными, радиальными или радиально-упорными. Кроме того, в зависимости от степени трения они подразделяются на подшипники качения и скольжения.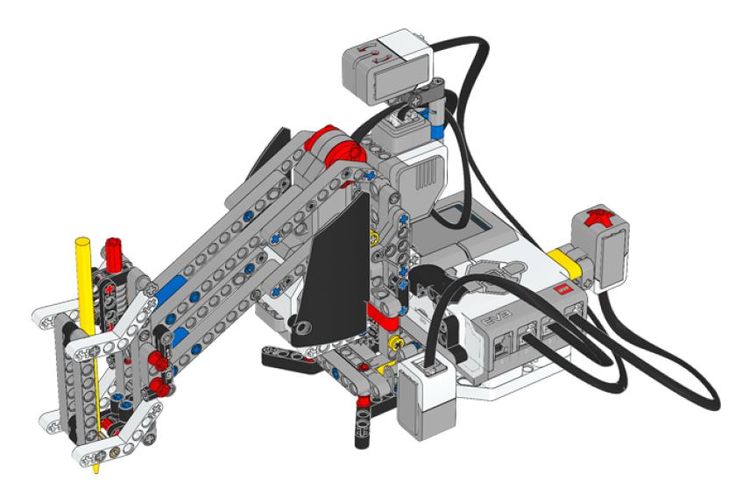
Направляющие для поступательного движения
Эти конструкции предназначаются для того, чтобы обеспечивать прямолинейное движение тех элементов, которые наличествуют в конструкции механизмов роботов. Их чаще всего можно встретить в манипуляторах промышленного назначения.
Основными составными частями прямолинейных направляющих являются направляющая дорожка и ведомая часть. Что касается направляющих дорожек, то они бывают с трением скольжения и с направляющими качения. Во втором случае движение обеспечивается за счет наличия таких деталей, как ролики, шарики и валы.
Пружины в механизмах роботов
Пружины в механизмах современных промышленных роботов используются для того, чтобы обеспечить демпфирование и ограничить при этом ход различных подвижных звеньев. Кроме того эти детали широко применяются для того, чтобы сглаживать неравномерности, возникающие при трансляции крутящего момента.
Муфты для механизмов роботов
Чтобы должным образом передать мощность от ведущего вала к валу ведомому используются такие конструкции, как муфты.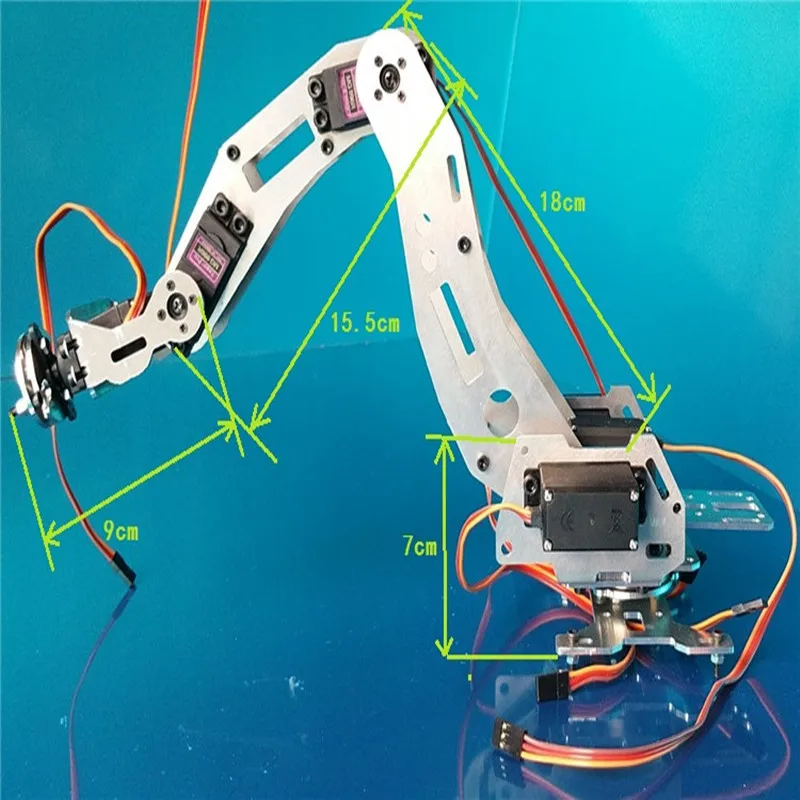
Те муфты, которые применяются в современных роботах, должны соответствовать общим требованиям, предъявляемым к механизмам такого рода. Им надлежит иметь повышенную надежность, обеспечивать минимально возможные деформации сопряжения, иметь как можно более компактные размеры и небольшую массу. Что касается типа той или иной муфты, используемой в современном роботе, то его выбор зависит от таких факторов, как требуемая точность позиционирования, жесткость конструкции, а также необходимость установки устройств в определенных пространственных положениях и обеспечение доступа к различным узлам и деталям для их обслуживания и ремонта.
Пневматические приводы роботов
Пневматические приводы, используемые в конструкции современных промышленных роботов, – это определенная комбинация неких устройств, которые тесно взаимосвязаны между собой и предназначены для того, чтобы приводить в движение различные рабочие звенья и рабочие органы. Пневматическими приводами оборудуется значительная часть роботов, поскольку они обладают отличными динамическими характеристиками, просты по своей конструкции, имеют высокое быстродействие, обходятся в производстве и эксплуатации недорого, и при этом весьма надежны.
Электромеханические приводы роботов
Основным звеном всех таких приводов является электродвигатель. Он может быть любого из распространенных на сегодняшний день типов: постоянного тока, шаговым, вентильным, асинхронным.
Все приводы, которые используются в современных промышленных роботах, должны соответствовать целому ряду довольно жестких требований относительно таких параметров, как габариты и масса, возможность выдерживать высокие нагрузки, надежность, стоимость и удобство в эксплуатации.
Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
(Типы роботов)
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
- Назначения машины;
- Условий ее работы;
- Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
- Голова — верхняя часть конструкции;
- Торс — основной каркас робота;
- Руки-манипуляторы с силовыми механизмами;
- Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т.е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.
(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т.:quality(80)/images.vogel.de/vogelonline/bdb/819000/819097/original.jpg) п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).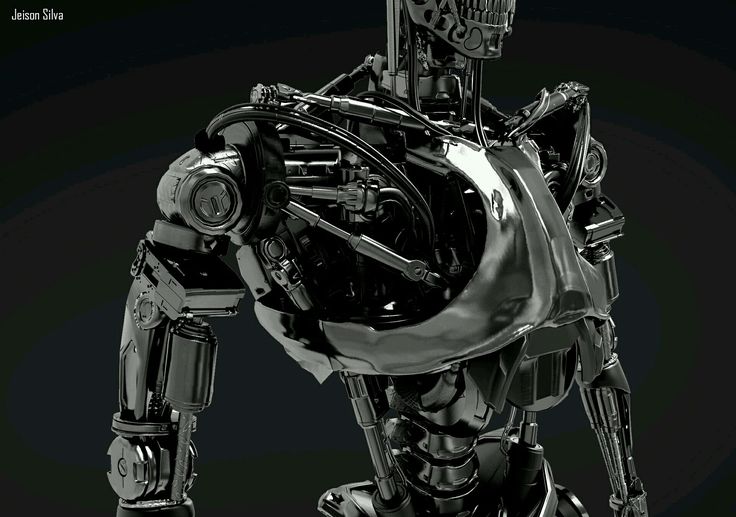
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.
(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным — аккумуляторы, солнечные батареи;
- Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.
(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
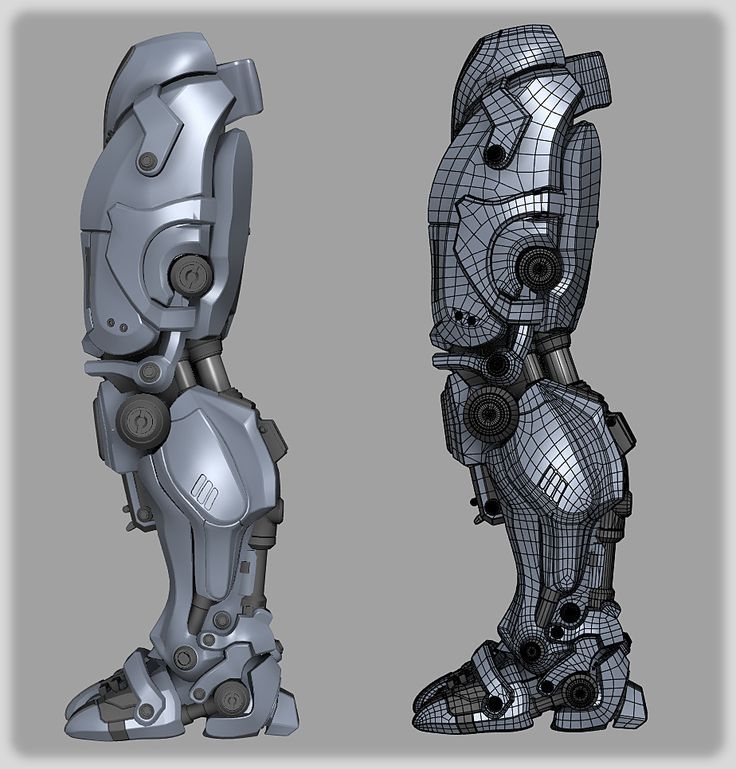
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).
(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.
д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.
(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке
- Тип робота: андроид
- Способ управления: автономный
- Задача: преодолеть лестничный пролет
- После включения питания загружается ЦПУ, которая проводит проверку всех систем.
- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
Все о робототехнике
Робототехника — это пересечение науки, технологии и инженерии, которое создает машины, называемые роботами. Робот — это программируемая машина, которая может помогать людям или имитировать их действия. Роботы изначально создавались для выполнения монотонных задач, таких как сборка автомобилей на конвейере, но с тех пор они расширились за пределы своего первоначального использования для выполнения таких задач, как тушение пожаров, уборка домов и помощь в сложных операциях. Роботы имеют разные уровни автономии: от управляемых человеком ботов, выполняющих задачи, полностью контролируемые человеком, до полностью автономных ботов, выполняющих задачи без каких-либо внешних воздействий.
Роботы имеют разные уровни автономии: от управляемых человеком ботов, выполняющих задачи, полностью контролируемые человеком, до полностью автономных ботов, выполняющих задачи без каких-либо внешних воздействий.
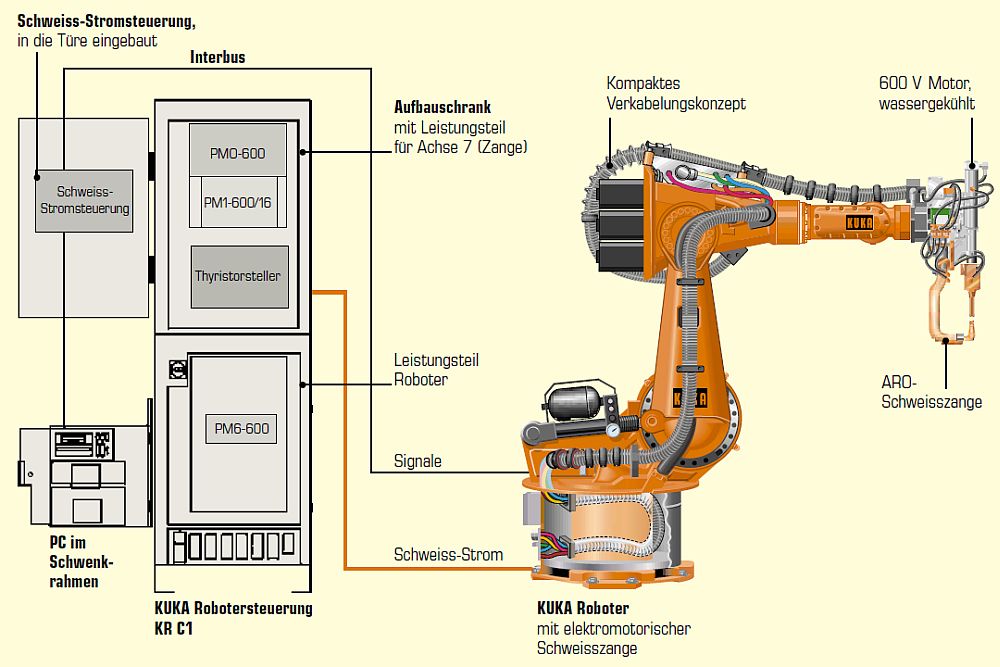
По мере развития технологий расширяется и область применения робототехники. Например, в 2005 году 90% всех роботов можно было найти за сборкой автомобилей на автомобильных заводах. Эти роботы в основном представляют собой механические руки, предназначенные для сварки или привинчивания определенных частей автомобиля. Сегодня существует развитое и расширенное определение робототехники.
Проектирование роботов — это создание плана или соглашения по созданию робота или роботизированной системы. Эти планы могут быть архитектурными чертежами, инженерными чертежами, рабочими процессами и принципиальными схемами. Термин «дизайн» имеет разное значение в разных областях. В некоторых случаях, как в инженерном и графическом дизайне, дизайном может считаться и непосредственное построение объекта.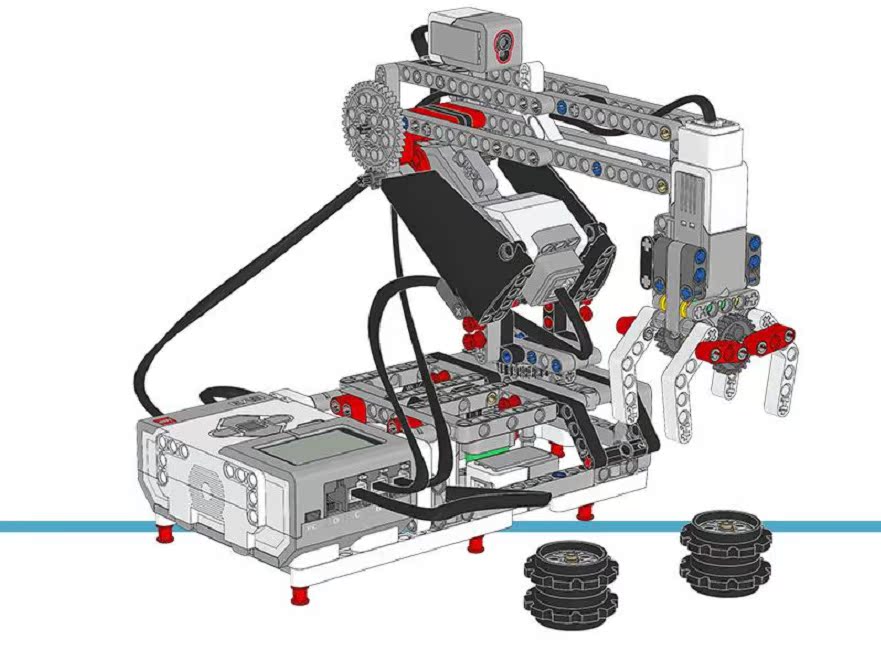 В этой статье рассматриваются характеристики роботов, элементы конструкции роботов и некоторые аспекты проектирования.
В этой статье рассматриваются характеристики роботов, элементы конструкции роботов и некоторые аспекты проектирования.
Изображение предоставлено Shutterstock.com/Gorodenoff
Характеристики робота
В то время как мир робототехники растет, у каждого робота есть определенные характеристики. Например, у всех роботов есть какая-то механическая конструкция или механизмы. Механический аспект робота позволяет ему выполнять задачи в среде, для которой он предназначен.
Роботам нужны электрические компоненты, которые управляют механизмами и приводят их в действие. По сути, для питания большинства роботов требуется электрический ток, такой как батарея.
Роботы содержат хотя бы какой-то уровень компьютерного программирования. Без набора кода, говорящего ему, что делать, робот был бы частью простого механизма. Кодирующий робот дает ему возможность знать, когда и как выполнять задачу.
Механизмы
Поскольку роботы должны иметь возможность двигаться, проектирование механизмов, облегчающих это движение, или аспект машиностроения, имеет решающее значение. В то время как машиностроение в более широком смысле представляет собой проектирование машин, разработчики роботов уделяют особое внимание двигателям и редукторам, чтобы обеспечить желаемое движение своих роботов.
В то время как машиностроение в более широком смысле представляет собой проектирование машин, разработчики роботов уделяют особое внимание двигателям и редукторам, чтобы обеспечить желаемое движение своих роботов.
Механический аспект обычно включает прототипирование отдельных движущихся частей перед сборкой всего робота. Уровень сложности зависит от предполагаемого робота и того, как он движется.
Электроника
Еще одним важным навыком, необходимым для создания роботов, является схемотехника или электроника робота. Понимание электроники и микроконтроллеров позволяет выбрать подходящие двигатели, компоненты и мощность для разрабатываемого робота. Кроме того, необходимо учитывать функциональность и физические свойства деталей.
Элементарное понимание схем позволяет инженерам построить простого робота, используя онлайн-поддержку, документацию и наборы, доступные в сообществе производителей роботов.
Программирование
После того, как в проекте будет электрически исправная схема и механизмы, готовые к движению, можно запрограммировать микроконтроллеры, используемые в схеме.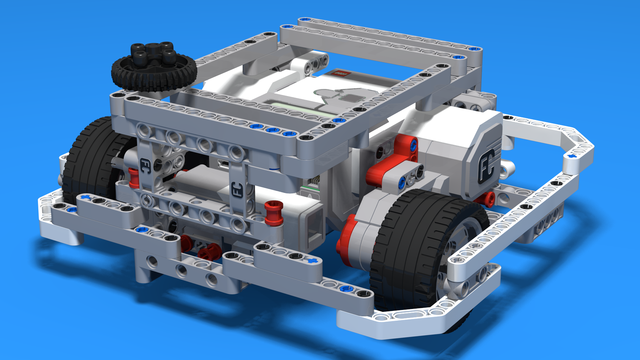 Микроконтроллер действует как мозг робота, которому нужны инструкции. Выбранный микроконтроллер определяет используемый язык программирования и то, как эта программа загружается в микроконтроллер.
Микроконтроллер действует как мозг робота, которому нужны инструкции. Выбранный микроконтроллер определяет используемый язык программирования и то, как эта программа загружается в микроконтроллер.
Изготовление
Изготовление — последний шаг в строительстве. На этом этапе компоненты собираются в корпус или корпус, изготовленный для робота. С появлением доступных цифровых производственных инструментов, таких как лазерные резаки, фрезерные станки с ЧПУ и 3D-принтеры, разработчики роботов-любителей могут создавать изысканные корпуса, которые выглядят профессионально, без дорогостоящих накладных расходов на крупные производственные операции.
Конструкция корпуса робота и выбранные материалы зависят от типа изготавливаемого робота и его назначения. В то время как корпуса практичны для покрытия механизмов и защиты драгоценной электроники, находящейся внутри, инженеры также могут использовать тела роботов, чтобы придать им индивидуальность, выразить предполагаемое взаимодействие и дать отзыв об использовании робота.
Особенности конструкции робота
Конструктивные особенности робота включают в себя все, что влияет на конструкцию робота, например, пересечение окружающей среды, мощность, необходимую для его движения, органы чувств, необходимые для выполнения желаемых задач, материалы, используемые для изготовления шасси, и желаемую эстетику.
Окружающая среда
Если робот движется, важным фактором является местность, по которой он будет перемещаться. Может потребоваться защита от пыли, воды или внешних воздействий. Возможности влияют на выбор материалов, конструкцию механизмов робота и форму корпуса.
Мощность
Способ питания робота зависит от его назначения. Например, батареи обеспечивают большую свободу передвижения, но шнур питания может быть более эффективным, если роботу не нужно далеко перемещаться. Каждому двигателю, датчику, процессору и т. д. требуется определенное количество энергии, поэтому необходимо определить, сколько энергии потребляет каждый компонент и как долго робот должен работать, чтобы учитывать требования к мощности в общей конструкции. Слишком мало электричества, и детали не будут работать, а слишком много электричества может поджарить хрупкие компоненты.
Слишком мало электричества, и детали не будут работать, а слишком много электричества может поджарить хрупкие компоненты.
Материалы
Материальные соображения включают такие вопросы, как: сколько будет весить робот? Существуют ли практичные точки крепления датчиков? Насколько надежен аккумулятор и легко ли к нему получить доступ? Тело робота может быть настолько простым или сложным, насколько это необходимо, но, возможно, лучшие конструкции роботов обеспечивают гибкость, облегчая гибкое прототипирование и сборку.
Чувства
Если роботу необходимо избегать столкновений, он должен иметь датчик приближения. Другим могут потребоваться другие датчики, такие как фотоэлементы, чтобы следить за солнцем, или датчики движения, чтобы включать его, когда кто-то находится поблизости. Бесчисленные датчики могут взаимодействовать с роботом. Необходимо учитывать всю информацию, которую робот должен получить из физической среды, и то, как эти данные используются для обеспечения движения робота по назначению.
Стиль
После того, как все утилитарные требования выполнены, можно подумать о стиле. Многие дизайнеры роботов добавляют в свои творения индивидуальный стиль. Потенциальные пользователи или клиенты могут предпочесть более гуманоидного робота или более симпатичного робота. Все зависит от назначения робота.
Заключение
В этой статье объясняются важные характеристики конструкции робота и рассматриваются соображения, которые необходимо учитывать при проектировании робота. Чтобы найти дополнительную информацию о робототехнике и других аспектах промышленности, посетите сайт Thomasnet.com, где вы найдете информацию о более чем 500 000 коммерческих и промышленных поставщиков.
Источники
- https://builtin.com/robotics
- https://www.galileo.org/robotics/design.html
- http://www.robotpark.com/academy/how-to-design-a-robot/
Связанные статьи
- Принципы промышленной робототехники
- Основы промышленного робота
- История робототехники
- Ведущие производители и поставщики компонентов робототехники в Северной Америке
- Восприятие клиентов и стратегия продукта
- Жизненный цикл промышленной продукции
- Типы инженеров
- Ведущие инженерные компании США
- Общие инженерные классы и уровни опыта
- 12 известных женщин-инженеров и изобретателей США
Еще от Инжиниринг и консалтинг
КАК ПРОЕКТИРОВАТЬ РОБОТА 81001
ПРОЦЕСС ПРОЕКТИРОВАНИЯ РОБОТА
Что такое проектирование роботов?
Проект робототехники — создание плана или соглашения по конструированию робота или роботизированной системы (как в архитектурных чертежах, инженерном чертеже, рабочем процессе, принципиальных схемах). Дизайн имеет разные коннотации в разных областях. В некоторых случаях непосредственное конструирование объекта (например, в гончарном деле, машиностроении, менеджменте, графическом дизайне) также считается дизайном.
Дизайн имеет разные коннотации в разных областях. В некоторых случаях непосредственное конструирование объекта (например, в гончарном деле, машиностроении, менеджменте, графическом дизайне) также считается дизайном.
Более формально конструкция робота определяется как; ( сущ. ) спецификация робота, представленная разработчиком робота, предназначенная для достижения целей в конкретной роботизированной среде с использованием набора примитивных компонентов, удовлетворяющая набору требований с учетом ограничений; ( глагол, переходный ) для создания конструкции робота в роботизированной среде
Этапы ПРОЦЕССА ПРОЕКТИРОВАНИЯ РОБОТА Структура для разработчиков роботов. RSF — это совокупность решений, состоящих из моделей, принципов и дорожных карт, разработанных для стандартизации качества процессов разработки роботов.
1- ОПРЕДЕЛИТЕ ПРОБЛЕМУ и ОПРЕДЕЛИТЕ ЗАДАЧИ
Вам необходимо определить, какую проблему вы пытаетесь решить, и цели, которых вы хотите достичь , прежде чем пытаться спроектировать и построить робота. Потратьте время на изучение ряда различных ситуаций, и как только вы решите, какова ситуация, и точно поймете, в чем проблема, напишите краткое описание проекта в журнале (это станет вашим рабочим документом, когда вы будете работать над своим проектом). robot.)
Потратьте время на изучение ряда различных ситуаций, и как только вы решите, какова ситуация, и точно поймете, в чем проблема, напишите краткое описание проекта в журнале (это станет вашим рабочим документом, когда вы будете работать над своим проектом). robot.)
Часто разработчики роботов и инженеры не придумывают идею самостоятельно, а сталкиваются с проблемами клиента, общества или окружающей среды, которые необходимо решить для удовлетворения основной «потребности». ” Без четкое определение этой необходимости и целей , процесс инженерного проектирования не может начаться. Много времени и карьеры было потрачено впустую в погоне за неопределенной целью.
Шаг 1 представляет собой краткое изложение, которое объясняет
— проблему, которую необходимо решить
— и цели, которые необходимо достичь.
Проблема должна быть точно и реалистично определена, чтобы начать процесс ее решения.
1. Получите четкое представление о Параметры проблемы.
Получите четкое представление о Параметры проблемы.
2. Составьте список целей и расположите их в порядке важности .
3. Определите Ограничения проблемы.
4. Много раз робот не может сделать все, что представляет проблема. Важно, чтобы уделял первоочередное внимание и проектировал машину, которая может делать большинство вещей и делать несколько вещей очень хорошо.
2-ИССЛЕДОВАНИЯ и МОЗГовой ШТОРМ
Исследования:
Написав краткое изложение, теперь вы готовы собирать информацию . Сначала вам нужно решить, какая информация вам нужна. Это будет отличаться от проекта к проекту, а также будет зависеть от объема информации и знаний, которые у вас уже есть.
Какова практическая функция дизайна? – Что должен делать мой робот?
Практические функции конструкции могут включать:
• движение: Как робот будет двигаться в своей среде?
• манипулирование: Как робот будет перемещать или манипулировать другими объектами в своей среде?
• энергия: Как питается робот?
• интеллект: Как «думает» робот?
• обнаружение: Как мой робот будет «узнавать» или выяснять, что находится в его окружении?
Исследования должны быть целенаправленными и включать новые идеи и тщательное изучение старых похожих идей. Иногда старые идеи оказываются лучшими. Вы когда-нибудь слышали поговорку: «Не изобретайте велосипед?» Старые идеи, которые потерпели неудачу, иногда становятся отличными золотыми приисками для исследований; эта идея могла потерпеть неудачу из-за отсутствия новых технологий, которые могут существовать сейчас.
Иногда старые идеи оказываются лучшими. Вы когда-нибудь слышали поговорку: «Не изобретайте велосипед?» Старые идеи, которые потерпели неудачу, иногда становятся отличными золотыми приисками для исследований; эта идея могла потерпеть неудачу из-за отсутствия новых технологий, которые могут существовать сейчас.
— Изучение других решений тех же и подобных проблем,
— Определение конкретных деталей конструкции, которые должны быть удовлетворены,
— Определение возможных и альтернативных проектных решений
— Планирование и проектирование соответствующей конструкции, включая чертежи
Мозговой штурм:
Первый шаг — начать рисовать , чтобы получить идеи на бумаге. Создание набросков и рисование от руки позволяет вам задействовать свою творческую сторону. Важно иметь точные и полные эскизы, чтобы воплотить идею в чертежи и модели от руки или САПР. Эта фаза также позволяет виртуальное прототипирование или тестирование продукта на компьютере. Вы можете найти потенциальные, а иногда и дорогостоящие недостатки в проекте еще до того, как будет построен реальный макет.
Вы можете найти потенциальные, а иногда и дорогостоящие недостатки в проекте еще до того, как будет построен реальный макет.
Рисуйте и обсуждайте идеи в группах . Нет идей — это плохие идеи. Важно учитывать все подходы к проблеме. То, что казалось неосуществимым или нелогичным в начале, может оказаться правильным в конце. Не так много проектов проходят разработку с первой попытки или на основе лучшей на тот момент идеи. Конечный проект обычно состоит из набора идей ; некоторые из них считались слишком рискованными, дорогостоящими или просто безумными.
Решения должны быть разделены в соответствии с их плюсами и минусами. Это задание лучше выполнять в группе. Мозговой штурм поощряет максимальное количество вкладов разных уровней опыта и различных подходов к проблеме. Альтернативные решения могут быть проанализированы и каталогизированы в соответствии с достоинствами и возможностями использования. После того, как эти идеи были сведены к приемлемому числу, эти числа необходимо обработать, чтобы оценить вероятность и стоимость успешного результата с использованием отдельных решений. Здесь вступают в игру более важные факторы, такие как здравый смысл и инстинкт. Если это кажется неправильным, не делайте этого.
После того, как эти идеи были сведены к приемлемому числу, эти числа необходимо обработать, чтобы оценить вероятность и стоимость успешного результата с использованием отдельных решений. Здесь вступают в игру более важные факторы, такие как здравый смысл и инстинкт. Если это кажется неправильным, не делайте этого.
3-СОЗДАТЬ ПРОТОТИП
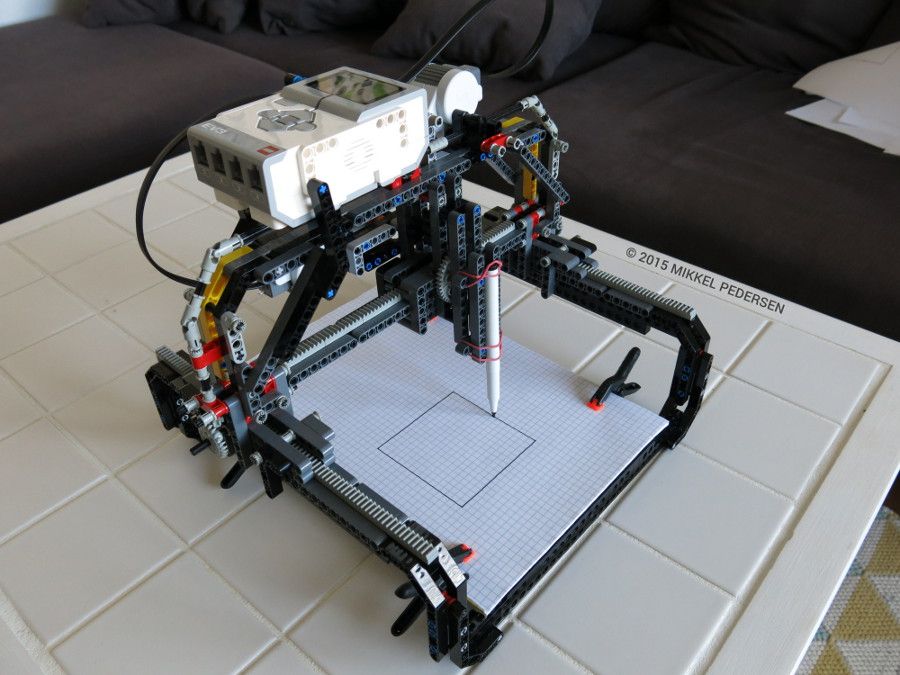
Лучший способ узнать, будет ли проект работать в реальных условиях, — построить прототип .
На этом этапе необходимы эскизы и примечания . (Возможно, для этого шага вы можете создать прототипы с помощью LEGO. Создав прототип Lego, сделайте его цифровое изображение.) Распечатайте изображение и сделайте пометки под изображением в своем журнале. Определившись с решением, вернитесь к составленному вами списку спецификаций. Убедитесь, что каждая спецификация удовлетворена.
Если первоначальный проект и прототип не полностью решают проблему или технические характеристики, не соответствуют проектным параметрам или остаются в рамках приемлемой стоимости, дизайнер может « вернуться к чертежной доске » (или компьютеру). В процессе инженерного проектирования есть петля, позволяющая вернуться к дизайну и уточнить или перепроектировать.
В процессе инженерного проектирования есть петля, позволяющая вернуться к дизайну и уточнить или перепроектировать.
Теперь пришло время сделать несколько рабочих чертежей. Эти чертежи помогут вам, когда вы начнете собирать своего робота. (Здесь опять-таки LEGO и цифровая камера могут быть вашими лучшими друзьями.) Вы можете делать свои рисунки вручную или использовать программу для рисования на компьютере, чтобы помочь вам.
4-СОБЕРИТЕ РОБОТА
В процессе сборки необходимо учитывать материалы, процессы, ограничения конструкции и стоимость . Компании вкладывают значительные средства в фабрики и инфраструктуру для создания своих проектов, поэтому, чем эффективнее был выполнен дизайн, тем лучше будет сборка. Как только процесс сборки начался, компания может начать окупать свои инвестиции в весь процесс проектирования за счет маркетинга и продажи продукта.
5-ТЕСТ ВАШЕГО РОБОТА
По мере продвижения строительных работ и начала формирования конструкции вы автоматически будете проводить испытания конструкции.
Всего комментариев: 0