Станок для производства пружин: Оборудование для производства пружин
Станок для изготовления пружин кручения EY-11-K. Диаметр проволоки: 0,3-1,2 мм. Наруж. диаметр пружин: ф42 мм. | Станок для изготовления пружин кручения EY-18-K. Диаметр проволоки: ф1,2-2,2 мм. Наруж. диаметр пружин: ф65 мм. | Станок для изготовления пружин кручения EY-41-K. Диаметр проволоки: ф2,3-4,5 мм. Нар. диаметр пружин: ф120 мм. | ||||||
Станок для навивки пружин сжатия EY-08. | Станок для навивки пружин сжатия EY-14. Диаметр проволоки: ф0,2-1,4 мм. Наружный диаметр пружин: ф30мм. | Станок для навивки пружин сжатия EY-15. Диаметр проволоки: ф0,3-1,6 мм. Наружный диаметр пружин: ф30 мм. | ||||||
Станок для навивки пружин сжатия EY-24. Диаметр проволоки: ф0,5-2,0 мм. Наружный диаметр пружин: ф40 мм. | Станок для навивки пружин сжатия EY-45. | Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-208-PNC/CNC. Диаметр проволоки: ф0,13-0,8 мм. Наружный диаметр пружин: ф20 мм. | ||||||
Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-212-PNC — EY-412-CNC. Диаметр проволоки: ф0,3-1,2 мм. Наружный диаметр пружин: ф20 мм. | Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-230-PNC — EY-430-CNC. Диаметр проволоки: ф0,8-3,0 мм. Наружный диаметр пружин: ф50 мм. | Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-238-PNC — EY-438-CNC. Диаметр проволоки: ф1,6-3,8 мм. Наружный диаметр пружин: ф60 мм. | ||||||
Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-265-PNC — EY-465-CNC. Диаметр проволоки: ф2,6-6,5 мм. Наружный диаметр пружин: ф100 мм. | Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-280-PNC — EY-480-CNC. Диаметр проволоки: ф3,0-8,0 мм. Наружный диаметр пружин: ф100 мм. | Станок для навивки пружин сжатия с ПЛК/ЧПУ EY-2120-PNC — EY-4120-CNC. | ||||||
Станок для изготовления колец EY-21535-PNC. Диаметр проволоки: ф1,5-4 мм. Наружный диаметр колец: ф100-350 мм. | Специализированный станок для изготовления пружин для сальников с управлением ПЛК EY-206-PNC. Диаметр проволоки: ф0,2-0,6 мм. Длина пружин: 20-280 мм. | Пружинонавивочный станок с ЧПУ MC-60. Диаметр проволоки: ф2,0-6,0 мм. Макс. наружный диаметр пружин: ф80 мм. | ||||||
Пружинонавивочный станок с ЧПУ MF-50. Диаметр проволоки: a1,4-5,0 мм. Макс.наружный диаметр пружин.: ф80-100 мм. | Пружинонавивочный станок с ЧПУ MF-20. Диаметр проволоки: ф0,2-2,5 мм. Макс. диаметр пружин: 40 мм. | Многоцелевой формовочный станок с ЧПУ MS-40. Диаметр проволоки: ф0,6-3,0 мм. | ||||||
Пружинонавивочный станок PC-5120. 5 управляемых осей. Диаметр проволоки: ф5-12 мм.
Наружный диаметр пружин: ф150 мм. | Пружинонавивочный станок PC-5160.
5 управляемых осей. Диаметр проволоки: ф8-20 мм.
Наружный диаметр пружин: ф250 мм. | Пружинонавивочный станок NC-3120.
3 управляемые оси.
Диаметр проволоки: ф5-12 мм.
Наружный диаметр пружин: ф150 мм. | ||||||
Пружинонавивочный станок LSC-2500. | Пружинонавивочный станок LSC-2150. Диаметр проволоки: ф5-15 мм.
|
 Диаметр проволоки: ф0,13-0,8 мм. Нар. диаметр пружин: 20 мм.
Диаметр проволоки: ф0,13-0,8 мм. Нар. диаметр пружин: 20 мм. Диаметр проволоки: ф2,0-4,5 мм. Наружный диаметр пружин: ф55 мм.
Диаметр проволоки: ф2,0-4,5 мм. Наружный диаметр пружин: ф55 мм.
 Диаметр проволоки: ф5-12 мм. Наружный диаметр пружин: ф150 мм.
Диаметр проволоки: ф5-12 мм. Наружный диаметр пружин: ф150 мм.
 Диаметр проволоки: ф20-50 мм. Наружный диаметр пружин: ф300 мм.
Диаметр проволоки: ф20-50 мм. Наружный диаметр пружин: ф300 мм.Станок для изготовления пружин и гибки проволоки [чертежи прилагаются]
Данная машина предназначена не только для изготовления пружин, она также может сгибать проволоку 0,8/0,9/1 мм в любую 2D-форму. Основная цель заключается в том, чтобы сделать станок для пружин достаточно точным. Другие станки для гибки проволоки своими руками не очень точны, а изгибы которые на них получаются, как правило, имеют довольно большой радиус. Вторая цель заключалась в том, чтобы максимально упростить сборку из общедоступных деталей и компонентов. Все конструктивные детали напечатаны на 3D-принтере, а все металлические детали доступны в большинстве хозяйственных магазинов.
Шаг 1. Посмотрите видео!
Я попытался записать всю сборку, чтобы помочь вам понять ее. Всегда лучше увидеть сборку в действии.
Примечание: данная статья является переводом.
Шаг 2: Необходимые детали и материалы
Детали для печати на 3D-принтере прилагаются.
- Сгибатель
- Головка инструмента
- Рама двигателя
- Механизм подачи
- Рама двигателя
- Нижняя рама
- Проводник
- Каретка промежуточной шестерни
- Прокладка промежуточной шестерни
- Проставка подающего механизма
- Гибочная пластина
- Выпрямительные ролики (2 шт.)
- Каркас (2x)
- Рама высшей передачи (2x)
- Ролики (14x)
- Держатель катушки
Винты и болты
- Шуруп для дерева 3×16 (16x)
- Болт с шестигранной головкой M3x10 (4 шт.
 )
) - Болт с шестигранной головкой M3x12 (18x)
- Болт с шестигранной головкой M3x20 (6 шт.)
- Болт с шестигранной головкой M3x40 (4 шт.)
- Гайка M3 (10 шт.)
- Шайба М3 (14 шт.)
Электроника
- Arduino UNO
- Комплект ЧПУ для Arduino UNO
- Шаговый драйвер A4988 (2x)
- Шаговый двигатель NEMA17 / 17HS8401 (2x)
- Адаптер питания 12В 3А
- Джампер (6x)
Подшипники и прочее
- Подающая шестерня V-образной формы (диаметр 30 мм)
- Маленькая стальная пружина 4×6 мм
- Подшипник 3x10x4 мм
- Подшипник 6x15x5 мм
- 6 мм стальной стержень
- Небольшой стальной лист толщиной 2 мм для гибки листа (опционально)
- Деревянная доска для основы (минимальный размер — 450×100 мм)
Spring Making 3D files.rar
92Скачать
Шаг 3: Печать пластиковых деталей
Загрузите файлы STL для пластиковых деталей и запустите их печатать на 3D принтере. Я всегда проектирую детали таким образом, чтобы исключить необходимость в использовании опор, поэтому постобработка была намного проще, а детали были чище.
Я всегда проектирую детали таким образом, чтобы исключить необходимость в использовании опор, поэтому постобработка была намного проще, а детали были чище.
Я печатал файлы с высотой слоя 0,15 мм, 3 периметрами и 40% заполнением с настройкой шаблона Gyroid.
Неважно, используете ли вы PLA или PETG. Детали не нагреваются, поэтому PLA подойдет, расчетное время печати 2 дня.
Шаг 4: Как это работает?
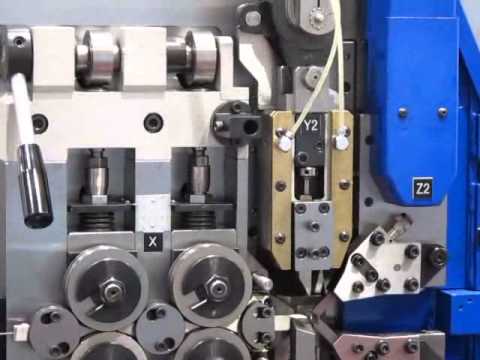
Пока вы печатаете пластмассовые детали, давайте посмотрим, как работает станок для гибки проволоки и из каких компонентов он состоит (справа налево):
- Держатель катушки — он удерживает катушку с проволокой для обработки машиной.
- Выпрямляющие ролики — набор из 7 роликов, чтобы проволока была как можно более прямой.
- Механизм подачи — вы можете найти аналогичный механизм в своем 3D-принтере. Набор шестерен, которые вытягивают проволоку с катушки через ролики и проталкивают ее к гибочной головке. Подающий механизм должен иметь достаточное сопротивление проволоке, чтобы он не соскользнул, что сделало бы машину неточной.

- Сгибатель — вращая штифт на головке, он сгибает проволоку в запрограммированную форму.
Все это управляется одним Arduino UNO с платой с ЧПУ. Arduino принимает команды от компьютера и переводит их в движения шаговых двигателей. Как и любой другой станок с ЧПУ.
Шаг 5: Сгибатель
Для начала возьмите деревянную основу и прикрутите основание для двигателей гибочного и подающего устройства. Используйте шурупы 3×16. Важно установить обе рамки, потому что их положение должно быть точным относительно друг друга, как показано на изображении макета ниже.
Продолжите установку одного из шаговых двигателей в раму двигателя гибочного станка и закрепите его четырьмя винтами M3x10. Ориентация значения не имеет. Теперь прижмите головку гибочного станка к валу двигателя. Они подходят друг другу. Довольно просто, да?
Шаг 6: Механизм подачи
Давайте рассмотрим механизм подачи проволоки. Рама уже установлена, поэтому первый шаг в сборке механизма подачи — это построить каретку для промежуточной шестерни, которая будет прижимать проволоку к подающей шестерне. Вдавите пластиковую втулку внутри подшипника 6x15x4 мм, чтобы проделать отверстие под болт M3. Вставьте болт M3x20. Вдавите гайку M3 в каретку и прикрутите подшипник болтом. Убедитесь, что подшипник вращается свободно. Вдавите вторую гайку M3 в корпус двигателя (со стороны двигателя в левом нижнем углу) и прикрутите каретку через небольшой кронштейн с помощью болта M3x20. Не затягивайте болт слишком сильно, каретка должна двигаться свободно. Поднимите каретку и вставьте пружину в отверстие под ней.
Вдавите пластиковую втулку внутри подшипника 6x15x4 мм, чтобы проделать отверстие под болт M3. Вставьте болт M3x20. Вдавите гайку M3 в каретку и прикрутите подшипник болтом. Убедитесь, что подшипник вращается свободно. Вдавите вторую гайку M3 в корпус двигателя (со стороны двигателя в левом нижнем углу) и прикрутите каретку через небольшой кронштейн с помощью болта M3x20. Не затягивайте болт слишком сильно, каретка должна двигаться свободно. Поднимите каретку и вставьте пружину в отверстие под ней.
Возьмите второй шаговый двигатель и поместите его в корпус двигателя. Пока не прикручивайте, еще нужна пластиковая деталь. Наденьте распорную втулку шестерни подающего механизма на вал двигателя и установите подающий механизм.
Подающий механизм, который я использую, взят от сварочного аппарата MIG. Шестерня имеет две бороздки сбоку. Один для провода 0,8 мм и один для провода 1 мм. Раньше я экспериментировал с шестернями с зубьями, используемыми в экструдерах 3D-принтеров. Но зубы оставляли видимые следы на проволоке.
Механизм подачи и гибочный станок соединены металлической пластиной толщиной 2 мм с небольшой канавкой на задней стороне, которая подает проволоку прямо в центр гибочной головки для идеального изгиба. Пластиковая пластина для гибки, напечатанная на 3D-принтере, отлично работает, но быстро изнашивается и требует частой замены. Так что используйте её, если не можете сделать идентичную деталь из металла.
Возьмите пластиковую деталь направляющей для проволоки и вдавите четыре гайки M3 в отверстия на ее задней стороне. Теперь прикрутите к ней изгибающуюся пластину болтами M3x20. Поместите направляющую для проволоки на переднюю часть рамы двигателя механизма подачи и закрепите ее на двигателе четырьмя болтами M3x12. Теперь отрегулируйте положение гибочной пластины. Он должен находиться точно в центре гибочной головки. Ослабьте четыре
болта на гибочной пластине и плотно установите гибочную пластину в центр гибочной головки. Снова затяните болты.
Шаг 7: Выпрямляющие ролики
Проволока обычно поставляется в виде катушки. Чтобы согнуть проволоку, ее сначала нужно распрямить. Это правда. Выпрямитель состоит из 7 роликов (4 вверху и 3 внизу), которые можно прижимать друг к другу для обеспечения надлежащего натяжения проволоки. Это также предотвращает скручивание проволоки при сгибании.
Чтобы согнуть проволоку, ее сначала нужно распрямить. Это правда. Выпрямитель состоит из 7 роликов (4 вверху и 3 внизу), которые можно прижимать друг к другу для обеспечения надлежащего натяжения проволоки. Это также предотвращает скручивание проволоки при сгибании.
Начнем со сборки роликов. Вставьте подшипник 3x10x4 мм в пластмассовый роликовый корпус. Вставьте болт M3x12 с одной стороны и шайбу M3 с другой стороны ролика. Шайба предотвратит трение колеса о раму. Прикрутите все ролики к станине и верхней раме. Вставьте верхнюю раму с 4 роликами в раму кровати. Имеется набор V-образных канавок для обеспечения надлежащего контакта. Вставьте две гайки M3 к нижней стороне базовой рамы и вставьте два болта M3x40 сверху вниз. Этот болт регулирует натяжение троса.
Если вы хотите сэкономить на подшипниках для роликов. Напечатайте деталь Straightener_RollerNoBearing вместо Straightener_Roller. Но производительность будет намного хуже.
Чтобы добиться еще лучших результатов, используйте 2 выпрямителя подряд.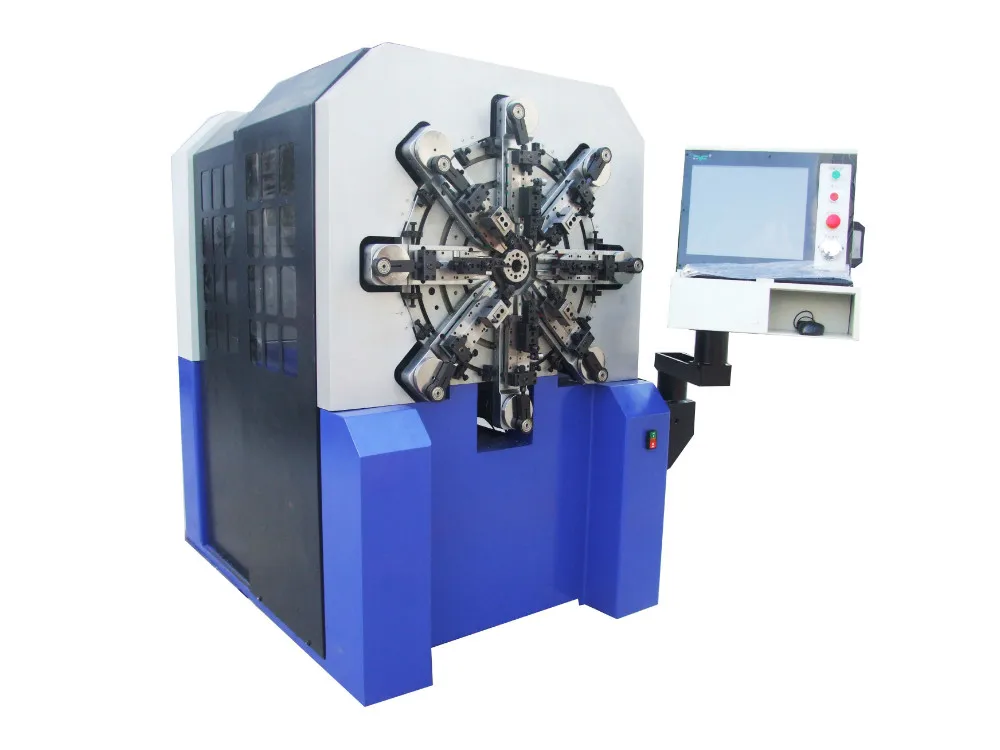
Шаг 8: Держатель катушки
Держатель катушки — это простой цилиндр, который удерживает проволоку и позволяет ей разматываться с катушки. Прикрепите его к концу машины с помощью четырех винтов 3×16.
Шаг 9: Подключение
Во-первых, проволока для гибки должна быть подана на станок. Я использую латунную проволоку 0,8 мм или 1 мм в виде катушки 5 м или 25 м.
Проволока проходит с катушки сначала через набор роликов для правки. Просто поместите проволоку в ролики. Затем она проходит через подающее устройство. Отрегулируйте положение подающего механизма так, чтобы нужная вам леска была вровень с поверхностью направляющей для проволоки. Нажмите рычаг на ведомой шестерне и протолкните проволоку через подающее устройство до гибочной пластины. Отпустите рычаг и дайте холостой шестерне прижаться к шестерне механизма подачи. Теперь вы можете рукой вращать шестерню подающего механизма, чтобы продвинуть проволоку к гибочной головке. Аккуратно отрегулируйте натяжение роликов, затягивая болты. Ролики не должны вращаться свободно, но проволока должна двигаться плавно. Размотайте часть проволоки, чтобы убедиться, что вы начинаете с хорошей и прямой проволоки.
Ролики не должны вращаться свободно, но проволока должна двигаться плавно. Размотайте часть проволоки, чтобы убедиться, что вы начинаете с хорошей и прямой проволоки.
Во-вторых, электроника контроллера также должна быть подключена к машине. Я использую классический Arduino UNO с CNC платой с двумя драйверами шаговых двигателей A4988. Двигатель подачи подключен к оси Z, а двигатель гибочной головки — к оси X. Драйверы настроены на максимально возможную точность — 3 перемычки под драйверами шаговых двигателей. Все должно питаться от источника питания 12В 3А.
Шаг 10: Исполнение кода
Все подключено? Хорошо. Наконец-то вы можете попробовать запустить станок. Я использую GRBL в сочетании с cncjs. Он разработан для запуска фрезерного станка, но отлично подходит для любого типа ЧПУ. GRBL — это прошивка, которую нужно прошить в Arduino UNO. Установите GRBL на Arduino и cncjs на свой компьютер.
Когда все готово, вы можете подключиться к станку и начать пробовать перемещать головку и проволоку вручную, нажимая кнопки Z+/- или X+/-.
Калибровка
; 1 degree = X0.1 $100=40 $101=400 ; 10 mm = Z10 $102=34 $110=1600 $111=600 $112=1000 $120=500 $121=350 $122=350</p>
Вышеупомянутые команды определяют калибровку. Проще говоря, это набор значений, определяющих, как преобразовать число, указанное в коде, в движение двигателя. Например, если вы настроили перемещение оси Z на 30, это фактически означает, что 30 мм проволоки будет проталкиваться через механизм подачи.
Установка нулевого положения головки гибочной машины
Движение гибочной головки определяется известным фиксированным положением гибочной головки. В моем случае это положение, когда изгибающий штифт на голове обращен влево. см. картинку ниже. Разумно отметить это нулевое положение на голове, чтобы иметь возможность вернуть голову в то же положение. Нет такой необходимости в определении нулевого положения для механизма подачи, потому что он всегда перемещается относительно текущего положения.
GCode
G91 G1 Z1 G90 G1 X2 G1 X-6
Это пример программы гибки. Это последовательность инструкций по перемещению двигателей.
Это последовательность инструкций по перемещению двигателей.
G91 - использовать относительные координаты (требуется перед перемещением по оси Z) G1 Z1 - подача 1 мм проволоки G90 - использовать абсолютные координаты (требуется перед любыми перемещениями по оси X) G1 X2 - поверните гибочную головку в положение 2 (в этом номере нет единиц измерения) G1 X-6 - поверните гибочную головку в положение -6
Если вы повторите вышеуказанные шаги 100 раз, вы получите код изгиба пружины. Вы можете найти больше исходных файлов для начала ниже.
hex-outer.gcode
48Скачать
hex-inner.gcode
41Скачать
spring. gcode
gcode
47Скачать
Шаг 11: Вот и все!
Хотя нет, это не так. У этой машины есть несколько ограничений или, скорее, упрощений, чтобы любой мог ее легко построить. Она предназначена для гибки только в одном направлении, потому что гибочная головка не может пропустить проволоку в другую сторону. Она может создавать только 2D-формы.
Пружинонавивочные машины | Машины для формования и изготовления пружинных намотчиков
Перейти к содержимому
Torin® [email protected]:43:51+00:00
Пружинные намотчики доступны для проволоки диаметром от 0,003 до 0,750 дюйма
Пружинные намотчики разработаны и изготовлены собственными силами
Torin гордится тем, что продолжает традицию «Сделано в Америке», при этом каждая машина для намотки пружин проектируется и изготавливается в нашей штаб-квартире в Восточном Берлине, штат Коннектикут. FENN уже более 120 лет является лидером в области производства качественного металлообрабатывающего оборудования.
FENN уже более 120 лет является лидером в области производства качественного металлообрабатывающего оборудования.
Наши специалисты не жалеют времени, чтобы спроектировать и построить машину, точно соответствующую вашим спецификациям и удовлетворяющую вашим уникальным производственным требованиям. Благодаря опыту создания стандартного металлообрабатывающего оборудования, а также индивидуальных решений для металлообрабатывающего оборудования — продукты и услуги FENN могут помочь повысить точность и производительность вашего бизнеса.
Намоточные машины для поддержания конкурентоспособности вашего бизнеса
Адаптивность является ключом к успеху на современном конкурентном рынке производства. Чтобы помочь вашему бизнесу оставаться конкурентоспособным, FENN рада предложить линейку высокоскоростных универсальных станков для намотки пружин Torin, которые теперь доступны как в одноточечной, так и в двухточечной конфигурации. Выберите станок для изготовления пружин, который наилучшим образом соответствует потребностям вашего бизнеса.
Долгая история опыта
На протяжении десятилетий Torin считается ведущим производителем пружинных намотчиков. В 2003 году FENN приобрела бренд у BHS-Torin и продолжает производство высококачественного оборудования, произведенного в США. Теперь под руководством ветерана BHS Torin Райана Каттера FENN продолжает инвестировать в разработку станков для изготовления пружин высочайшего качества, доступных на рынке.
Навивка двухточечных пружин
R-Series Torin Станок для изготовления двухточечных пружин
В серии Revolution используется такая же надежная механика и надежное и точное управление, что и в серии FZ, с использованием технологии двухточечной намотки. FENN предлагает двухточечные намотчики Torin для проволоки диаметром от 0,008 до 0,750 дюйма. Станки для навивки двухточечных пружин Torin серии R могут производить круглые пружины сжатия и растяжения. Намотчики пружин Torin спроектированы и изготовлены для быстрой настройки и замены пружин с помощью удобного генератора программ для пружин. Узнайте о различиях между двухточечными пружинными намотчиками и одноточечными здесь , чтобы узнать больше о том, как FENN может разработать решение, отвечающее вашим требованиям.
Узнайте о различиях между двухточечными пружинными намотчиками и одноточечными здесь , чтобы узнать больше о том, как FENN может разработать решение, отвечающее вашим требованиям.
Загрузить брошюру
| Размер машины | 0 Р-10 | 1 Р-11 | 1-1/2 Р-115 | 2 Р-12 | 2-1/2 Р-125 | 3 Р-23 | 4 Р-24 | 5 Р-25 |
|---|---|---|---|---|---|---|---|---|
| Диаметр проволоки (дюймы) | .008 – .028 | .015 – .080 | .032 – .135 | .047 – .177 | .080 – .275 | .125 – .375 | . 250 – .625 250 – .625 | .375 – .750 |
| Диаметр проволоки (мм) | .200 – .700 | .400 – 2,00 | .800 – 3,50 | 1,20 – 4,50 | 2,00 – 7,00 | 3,20 – 9.50 | 6,35 – 16,0 | 9,50 – 19,0 |
| Минимальный индекс | 3 | 3 | 3 | 3 | 3 | 3 | 5 | 5 |
| Корпус пружины макс. (дюймы) | .875 | 1,75 | 2,25 | 3,25 | 4,25 | 5 | 6 | 10 |
Корпус пружины макс. (мм) | 22 | 44 | 57 | 83 | 108 | 127 | 152 | 254 |
| Длина подачи | НЕОГРАНИЧЕННЫЙ |
Постоянная сила
С 1950-х годов компания Torin поставляет намотчики постоянной силы – специально разработанные моталки для производства пружин постоянной силы. Компания FENN разработала моталки серии CF в надежные машины, способные производить высококачественные пружины постоянного усилия. В рамках уникальной конструкции FENN один и тот же набор подающих роликов можно использовать для всей линейки станков — нет необходимости менять ролики для материала различной толщины. FENN предлагает полный пакет для наматывания с постоянным усилием: машина, пресс и направляющая, выходные желоба, раздатчики и печи.![]() Свяжитесь с нами чтобы узнать больше!
Свяжитесь с нами чтобы узнать больше!
Преимущества конструкции Torin
- Параллельность подающих роликов для обеспечения выравнивания материала во время производства
- Один и тот же комплект подающих роликов можно использовать для всей серии станков
- Пресс может быть спроектирован для установки наборов штампов заказчика
- позволяет настраивать входы и выходы. для контроля дополнительных аспектов производства
- Возможности подачи слева и справа
Станок с ЧПУ FENN
Возможные диапазоны материалов и модели
- Хотя материалы, выходящие за эти диапазоны, могут быть размещены, пример меньших материалов может иметь толщину от 0,004 дюйма до 0,250 дюйма, а пример больших материалов может варьироваться от 0,040. толщиной 2,00 дюйма (*Примечание: требуемый размер модели зависит от дополнительных факторов)
- Для этих диапазонов модели FENN включают CF-11, CF-115 и CF-12
- Мы можем разработать дополнительные размеры моделей по вашим требованиям!
Модернизация и модернизация
Программа модернизации механических намотчиков серии W
Программа модернизации электрооборудования FENN предлагает непревзойденную ценность: наши высококвалифицированные, опытные инженеры и заводские техники позволяют нам поставлять модернизированное оборудование за часть стоимости новая машина . Позвольте нам помочь вам максимизировать потенциал и производительность вашего пружинного намотчика Torin с помощью нашей технологии ЧПУ, и все это подкреплено нашей гарантией на 1 год дооснащения ! См. нашу брошюру по механической модернизации .
Позвольте нам помочь вам максимизировать потенциал и производительность вашего пружинного намотчика Torin с помощью нашей технологии ЧПУ, и все это подкреплено нашей гарантией на 1 год дооснащения ! См. нашу брошюру по механической модернизации .
Модернизация системы управления также доступна для старых намотчиков пружин Torin с сервоуправлением. Обеспечьте свою машину для формования пружинных моталок полным обновлением системы управления, включая программное обеспечение с новейшими функциями серии FZ. С этим пакетом устраните риск использования устаревших компонентов. Для получения дополнительной информации см. нашу брошюру Z Series и обновления ЧПУ
Z SERIES & CNC модернизация
Модернизация системы управления также доступна для старых намотчиков пружин Torin с сервоуправлением. Обеспечьте свою машину для формования пружинных моталок полным обновлением системы управления, включая программное обеспечение с новейшими функциями серии FZ. С этим пакетом устраните риск использования устаревших компонентов. Для получения дополнительной информации см. нашу брошюру серии Z и обновлений ЧПУ .
С этим пакетом устраните риск использования устаревших компонентов. Для получения дополнительной информации см. нашу брошюру серии Z и обновлений ЧПУ .
ПРОГРАММА ЭЛЕКТРИЧЕСКОЙ МОДЕРНИЗАЦИИ МЕХАНИЧЕСКИХ ПРУЖИННЫХ МАЧТОВ
Теперь вы можете воспользоваться максимальным потенциалом и производительностью нашей технологии ЧПУ за небольшую часть стоимости нового станка. Модернизируя свой механический пружинный намотчик, вы можете расширить возможности своей машины с помощью высококачественных деталей OEM, чтобы поддерживать ее работу с оптимальной производительностью. Доверьте нашим экспертам надежное решение, которое прослужит так же долго, как и наши машины! Узнайте больше о преимуществах электрической модернизации вашей машины Torin .
Программы профилактического обслуживания
Не допускайте простоев!
Лучшая услуга, которую может предоставить FENN, — это предотвращение незапланированного обслуживания.
Позвольте специалистам FENN поддерживать работу вашей машины на самом высоком уровне производительности.
Наша программа включает в себя:
- Ежегодное посещение завода, состоящее из 50-точечной проверки сертифицированным техническим специалистом OEM для оценки важнейших механических и электронных компонентов вашей машины, чтобы предотвратить проблемы до того, как они повлияют на ваше производство.
- Включенный подробный отчет об осмотре, содержащий ценную информацию о состоянии вашей машины, проблемных областях и рекомендуемых ремонтных работах
- Одно дополнительное дополнительное посещение предприятия — решите, когда и как использовать посещение в соответствии с потребностями вашего бизнеса.
- Обучение: Обеспечение надлежащей подготовки вашего персонала для использования всего потенциала металлообрабатывающего станка
- Сервис: Установка деталей, полученных в результате первоначальной проверки
- Ремонт: Решение любых дополнительных вопросов обслуживания или технического обслуживания, возникающих в течение года
- Участники программы получают эксклюзивную скидку 15% на все наши качественные запасные части OEM
- Наслаждайтесь расширенными возможностями доступа ! Помимо запланированных посещений PM, клиенты PM будут получать льготы в очереди на обслуживание.

- Обновления программного обеспечения для пружинных намотчиков серии FZ и R включены в программу!
Запчасти от ОЕМ!
FENN понимает, что безотказная работа является ключом к производительности и прибыльности вашего бизнеса. Мы предлагаем полный ассортимент запасных частей для металлообрабатывающих станков FENN и Torin. Обладая обширным складским запасом, FENN может предложить широкий ассортимент запчастей, быстро доставленных к вашей двери. Наши квалифицированные сотрудники помогут обеспечить получение необходимых деталей для обеспечения эффективной работы вашего оборудования с минимальным временем простоя. Использование запасных частей FENN является важным аспектом для максимального повышения эффективности вашей машины. Не знаете точно, что вам нужно? Наш опытный персонал найдет время, чтобы работать с вами, чтобы понять ваши уникальные требования.
Программа модернизации вашего устаревшего оборудования
Поскольку оборудование FENN сохраняет традиции качества, надежности и долговечности, FENN разработала программу обновления для модернизации, восстановления или модернизации вашего существующего оборудования FENN. Клиенты могут максимизировать производительность своей машины для устаревшего оборудования и продлить срок службы машины.
Клиенты могут максимизировать производительность своей машины для устаревшего оборудования и продлить срок службы машины.
Мы здесь для вас — обучение, поддержка и обслуживание
Как компания с вековой историей, мы гордимся оборудованием, которое мы проектируем и производим, всегда гарантируя, что оно соответствует вашим производственным требованиям. Мы предлагаем комплексные программы обучения, которые могут быть адаптированы к потребностям вашего бизнеса. Независимо от того, приобрели ли вы новый металлообрабатывающий станок, модернизировали существующее оборудование или ваш опытный персонал уходит на пенсию, FENN всегда готова ответить на вопросы и предложить обучение, чтобы ваш бизнес оставался продуктивным. Дайте нам знать, как мы можем помочь!
Контакты по запасным частям
- Имя*
Первый
Last
- Email*
- Phone*
- Company Name*
- State*
Please SelectAlabamaAlaskaArizonaArkansasCaliforniaColoradoConnecticutDelawareDistrict of ColumbiaFloridaGeorgiaHawaiiIdahoIllinoisIndianaIowaKansasKentuckyLouisianaMaineMarylandMassachusettsMichiganMinnesotaMississippiMissouriMontanaNebraskaNevadaNew HampshireNew JerseyNew MexicoNew YorkNorth CarolinaNorth DakotaOhioOklahomaOregonPennsylvaniaRhode IslandSouth CarolinaSouth DakotaTennesseeTexasUtahVermontVirginiaWashingtonWest VirginiaWisconsinWyomingArmed Forces AmericasArmed Forces EuropeArmed Forces Pacific
- Country*
United StatesAfghanistanAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua and BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Sint Eustatius and SabaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBrunei DarussalamBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos IslandsColombiaComorosCongo, Democratic Republic of theCongo, Republic of theCook IslandsCosta RicaCroatiaCubaCuraçaoCyprusCzech RepublicCôte d’IvoireDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEswatini (Swaziland )ЭфиопияФолклендские островаФарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибралтарГрецияГренландияГренадаГваделупаГуамГватемалаГернсиГвинеяГвинея -BissauGuyanaHaitiHeard and McDonald IslandsHoly SeeHondurasHong KongHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle of ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKuwaitKyrgyzstanLao People’s Democratic RepublicLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacauMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorthern Mariana IslandsNorwayOmanPakistanPalauPalestine, State ofPanamaPapua New GuineaParaguayPeruPhilippinesPitcairnPolandPortugalPuerto RicoQatarRomaniaRussiaRwandaRéunionSaint BarthélemySaint HelenaSaint Kitts and NevisSaint LuciaSaint MartinSaint Pierre and MiquelonSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaS loveniaSolomon IslandsSomaliaSouth AfricaSouth GeorgiaSouth KoreaSouth SudanSpainSri LankaSudanSurinameSvalbard and Jan Mayen IslandsSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-LesteTogoTokelauTongaTrinidad and TobagoTunisiaTurkeyTurkmenistanTurks and Caicos IslandsTuvaluUS Minor Outlying IslandsUgandaUkraineUnited Arab EmiratesUnited KingdomUruguayUzbekistanVanuatuVenezuelaVietnamVirgin Islands, BritishVirgin Islands, U.
 S.Wallis and FutunaWestern SaharaYemenZambiaZimbabweÅland Islands
S.Wallis and FutunaWestern SaharaYemenZambiaZimbabweÅland Islands - Type of Inquiry*
Please SelectSalesCustomer ServiceProduct SupportMediaWebsite Feedback
- Related Products/Services*
Please SelectRolling MillsWire Flattening & ShapingTurks HeadsTorin Spring CoilersSwagersDrawing EquipmentPM ProgramSpare PartsUpgrade & Remanufacture
- How did you hear about us?*
Please SelectWord из ртаПредыдущий клиентВыставкаСобытиеЖурналРефералРассылка по электронной почтеLinkedinYouTubeИнтернет-рекламаИнтернет-поиск
- Сообщение
- Прикрепить файл(ы)
Перетащите файлы сюда или
Допустимые типы файлов: jpeg, jpg, gif, png, pdf, doc, docx, макс. размер файла: 64 МБ, макс. файлы: 5.
- Согласие*
Используя эту форму, вы соглашаетесь с нашей Политикой конфиденциальности
- Пожалуйста, подтвердите
Ссылка для загрузки страницы
Перейти к началу
Станок для навивки пружин с ЧПУ
— Станок для изготовления пружин — AutolinkCNC
2-осевой станок для навивки пружин с ЧПУ
3-осевой станок для навивки пружин с ЧПУ
4-осевой станок для навивки пружин с ЧПУ
5-осевой станок для навивки пружин с ЧПУ
Станок для навивки пружин с ЧПУ обеспечивает высокую скорость производства с допусками . Auto Link Technologies Co., Ltd. является ведущим производителем и поставщиком станка для намотки пружин с большим опытом работы в промышленности.
Auto Link Technologies Co., Ltd. является ведущим производителем и поставщиком станка для намотки пружин с большим опытом работы в промышленности.
Мы разрабатываем наши машины, используя сырье высшего качества и новейшие технологии, чтобы обеспечить самые высокие стандарты безопасности. 9Машина для изготовления пружин 0025 доступна у нас в различных спецификациях и размерах. Мы поможем вам выбрать правильный продукт для удовлетворения всех ваших промышленных потребностей.
Auto Link с командой квалифицированных специалистов гарантирует, что наши машины разработаны в соответствии с международными стандартами качества. Мы производим 2-осевой станок , 3-осевой и 4-осевой станок для намотки пружин по высоким стандартам.
Эти намоточные машины используются в автомобильной промышленности и производстве автокомпонентов, черной металлургии, аэрокосмической промышленности, тяжелом машиностроении, производстве электроэнергии, железных дорогах, обороне, кузнечной промышленности, судостроении и т.
Всего комментариев: 0