Что такое кинематика станка: кинематическая схема токарного и фрезерного станков
Содержание
КИНЕМАТИКА СТАНКОВ | ОБРАБОТКА МЕТАЛЛОВ
Глава 3. Общие сведения о металлорежущих станках и технологическом процессе обработки на них
Для изготовления детали рабочим органам станка необходимо сообщить определенные согласованные движения, при которых с заготовки снимается избыточный материал — припуск (см.гл.2).
В станках бывает вращательное или поступательное (возвратно-поступа¬тельное) движение резания, сообщаемое заготовке или режущему инстру¬менту. На всех изучаемых станках — токарных, фрезерных, сверлильных и шлифовальных, — движение резания вращательное. На станках для лезвий¬ной обработки резанием (токарных, фрезерных, сверлильных) скорость ре¬зания (м/мин) определяется по формуле: v=пdn/1000, где d — диаметр обра¬батываемой поверхности заготовки или инструмента, мм; n — частота их вращения, мин1 (об/мин). Для шлифовальных станков (при абразивной об¬работке) скорость резания (м/с) vшл=пdкрnКр/(1000-60).
Движение подачи непрерывное на токарных, фрезерных и сверлильных станках. На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
Кинематическая схема станка представляет собой схему, на которой с по¬мощью условных обозначений изображаются звенья механизмов и кинема¬тические пары с указанием размеров, необходимых для кинематического анализа. Зависимость движений, связанных между собой элементов передач и механизмов определяется кинематической связью. Каждая связь состоит из механических, электрических, гидравлических и других кинематических це¬пей, по которым осуществляется передача движения. Кинематические цепи обеспечивают также изменение скоростей и направления движения испол¬нительных органов, в т.ч. при неизменной скорости привода (электродвига¬теля), преобразование и суммирование движений и т.п. Кинематические це¬пи состоят из отдельных звеньев. Элементы кинематических цепей (ГОСТ 2.770-68*) изображаются в ЕСКД1 на схемах условными обозначениями (табл. 3.1).
3.1).
Для станков, имеющих наряду с механическими передачами гидравличе¬ские, электрические и пневматические устройства, составляются соответст¬вующие гидравлические, электрические и пневматические схемы.
Элементы расчета кинематических цепей. Основным кинематическим параметром, характеризующим все виды механических передач вращатель¬ного движения и необходимым для определения показателей промежуточ¬ных и выходных элементов устройств приводов в станках, является отноше-
3.1. Условное обозначение элементов кинематики
ние i2 частоты вращения n — ведомого вала II(рис.3.1,а) к частоте вращения n1 ведущего вала (мин1):Следовательно, для ременной передачи (рис.3.1,6) i=d1/d2, где d1 и d2 — диаметр соответственно ведущего и ведомого шкивов; для зубчатых (рис.3.1,а) и цепных передач i=z1/z2, где z1 и z2 — число зубьев соответственно ведущего и ведомого колес или ведущей и ведомой звездочек; для червячной передачи (рис.3.1,в) i’=K/z, где К— число заходов червяка; г — число зубьев червячного колеса.
Рис.3.1. Передачи в станках:
а — зубчатая; б — ременная; в — червячная; г — винтовая; д — реечная
При последовательном расположении нескольких передач соотношение характеристик движения начального nн и конечного nк элементов кинемати¬ческой цепи определяется произведением отношений Г отдельных передач:
Передачи, преобразующие вращательное движение в поступательное, ха¬рактеризуются расстоянием, на которое поступательно перемещается дви¬жущийся элемент за один оборот приводного. Так, для передачи винт-гайк2 перемещение винта (рис.3.1,г), l=РК, где Р— шаг винта, мм; К— число за¬ходов винта.
Реечная передача характеризуется расстоянием l, на которое перемеша¬ется рейка (мм) за один оборот зубчатого колеса (рис.3.1.д): 1=пmz, где г — число зубьев; т — модуль, мм.
Скорость перемещения (мм/мин) конечного элемента (узла) кинемати¬ческой цепи vк=пнi’0бЩl.
Математическое выражение связи движений ведущего и ведомого эле¬ментов (начального и конечного звеньев) кинематической цепи станка на¬зывается уравнением кинематического баланса. В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
Для станков с главным вращательным движением предельные значения частот вращения шпинделя nmin и nmах обеспечивают обработку заготовки с диаметром обрабатываемых поверхностей в диапазоне от dmах до dmin.
Диапазон регулирования частоты вращения шпинделя определяется отношение
наибольшей частоты вращения шпинделя станка к наименьшей: D=nmax/NMIN. ЭТОТ диапазон характеризует эксплуатационные возможности станка.
ЭТОТ диапазон характеризует эксплуатационные возможности станка.
Значения частот вращения от nmin до nmax образуют ряд. В станкостроении, как правило, применяют геометрический ряд, в котором смежные значения и различаются в ф раз (ф — знаменатель ряда): n2/n1=n3/п2=n4/n3=…=nj/nj-1=ф. Приняты и нормализованы следующие знаменатели ф: 1,06; 1,12; 1,26, 1,41; 1.58; 1,78; 2,00. Значения указанных знаменателей ф положены в основу таб¬личных рядов частот вращений шпинделя.
Автор — nastia19071991
Схема кинематики токарного станка
Токарные станки составляют основную часть станочного парка многих металлообрабатывающих предприятий. Токарные станки используются для обработки внутренних и наружных поверхностей тел вращения. Режущим инструментом выступают резцы, сверла, развертки, зенкера, метчики и плашки. При помощи специальных приспособлений, таких как планшайбы, на токарных станках можно обрабатывать сложные и неправильные формы. Использование специальных устройств расширяет возможности оборудования, позволяет выполнять многие другие операции машинной обработки металла.
Расположение шпинделя — вала, на котором закрепляется патрон с обрабатываемой заготовкой, определяет всю конструкцию станка. Более распространены станки с горизонтальным расположением шпинделя, ими являются токарно-винторезные, револьверные, лоботокарные станки. Вертикальный шпиндель имеют токарно-карусельные станки, они предназначены для обработки низких заготовок большого диаметра.
Строение токарно-винторезного станка
Токарно-винторезные станки имеют максимальные технологические возможности из всего оборудования этой группы, что позволяет их эффективно использовать для изготовления небольших серий изделий. Конструкция этих станков была разработана в первой половине XIX века и с тех пор были внесены только небольшие изменения, касающиеся автоматизации оборудования.
Рис.: 1 – передняя бабка с коробкой скоростей, 2 – гитара сменных колес, 3 – коробка подач, 4 – станина, 5 – фартук, 6 – суппорт, 7 – задняя бабка, 8 – шкаф с электрооборудованием.
Как и у большинства промышленного оборудования, основой этого станка выступает станина. Она выполняется литьем или сваркой и обязательно крепится к полу анкерными болтами. С левой стороны относительно рабочего на станине располагается передняя или шпиндельная бабка. Она представляет собой пустотелый корпус, в котором находятся, шестерни, шпиндель, подшипники, система смазки и переключения диапазонов. На передней панели бабки находятся многочисленные элементы управления станком. Шпиндель выходит из передней бабки в рабочую зону. На шпиндель устанавливаются приспособления для удержания заготовки, основная часть которых — патроны с разным количеством кулачков.
Ниже передней бабки располагается коробка подач. На её передней панели находятся регуляторы для управления подачей. Коробка подач передает вращение на фартук, располагающийся в центральной зоне станка, при помощи вала при обработке поверхностей или винта при нарезке резьбы. Винт располагается над валом, на большей части его длины нарезана червячная спираль.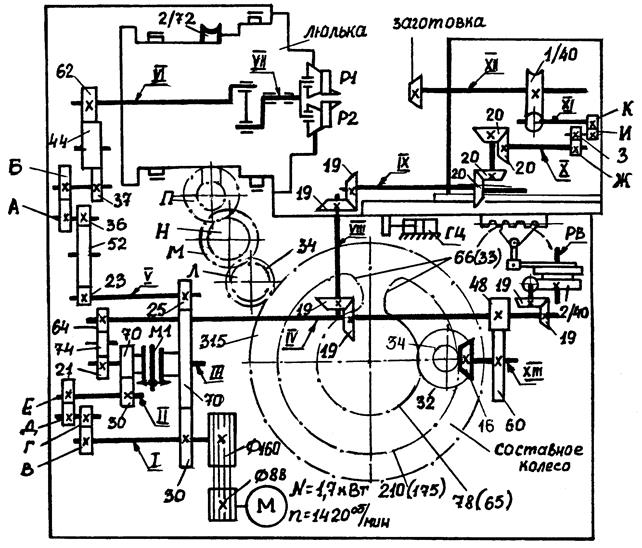 Вал имеет более короткую спираль червячной передачи, но большего диаметра. В фартуке находится механизм, который преобразует вращательное движение вала или винта в возвратно-поступательное движение суппорта.
Вал имеет более короткую спираль червячной передачи, но большего диаметра. В фартуке находится механизм, который преобразует вращательное движение вала или винта в возвратно-поступательное движение суппорта.
Суппорт является элементом станка, на котором устанавливается основной инструмент. Нижние салазки суппорта перемещаются по продольным направляющим, расположенным на станине. Сверху находятся верхние салазки, они расположены перпендикулярно к нижним. Перемещающаяся по ним резцовая каретка имеет возможность повтора в горизонтальной плоскости. На ней находится резцедержатель, в котором закрепляется инструмент. Таким образом, конструкция суппорта и направляющих станины обеспечивает инструменту возможность продольного и поперечного движения, а также наклона относительно центра. Это позволяет обрабатывать инструментом цилиндрические и конические поверхности.
На противоположной стороне станка, с правой стороны, располагается задняя бабка. При обработке длинных заготовок она используется как вторая точка опора, помимо шпинделя. Также на ней размещается инструмент, выполняющий сверление или обработку осевого отверстия в заготовке.
Также на ней размещается инструмент, выполняющий сверление или обработку осевого отверстия в заготовке.
Кинематическая схема токарно-винторезного станка
Главное движение станка осуществляется односкоростным асинхронным трехфазным двигателем, в редких случаях многоскоростным.
Движение с двигателя передается на коробку скоростей посредством клиноременной передачи. В коробке скоростей находится 6-8 валов с зубчатыми колесами. Валы для удобства нумеруются римскими цифрами, первым идет вал со шкивом, далее по кинематике. Выбирая используемые передачи, можно регулировать скорость вращения шпинделя в широких пределах. На токарных станках можно получить более 20 различных скоростей вращения шпинделя с закрепленной на ней заготовкой. Для обратного вращения шпинделя предусмотрены две фрикционные муфты.
Перемещение фартука через коробку подач производится либо напрямую от шпинделя, либо через звено повышения шага, которое находится в коробке скоростей. Оно состоит из трех зубчатых передач, понижающих частоту вращения. Далее находится механизм реверса, который обеспечивает возможность перемещения фартука с суппортом в оба направления.
Оно состоит из трех зубчатых передач, понижающих частоту вращения. Далее находится механизм реверса, который обеспечивает возможность перемещения фартука с суппортом в оба направления.
Коробка подач обладает двумя кинематическими схемами. Первая предназначена для формирования дюймовой резьбы, она содержит одну фрикционную муфту и передает вращение на ходовой винт. Вторая схема предназначена для обработки поверхностей, нарезки метрических резьб. Она передает вращение на ходовой вал. Управление второй цепью производится тремя фрикционными муфтами.
Ряд зубчатых передач находится в фартуке. Они преобразуют вращение вала и винта в передвижение суппорта. Отдельной частью кинематической схемы станка выступает механизм быстрого перемещения суппорта. Он приводится в действие дополнительным электродвигателем посредством ременной передачи.
Предыдущая статья
Следующая статья
Получить консультацию
по инструменту, методам обработки, режимам или подобрать необходимое оборудование можно связавшись с нашими менеджерами или отделом САПР
Также Вы можете подобрать и приобрести режущий инструмент и оснастку к станку, производства Тайваня, Израиля
Отправляя заявку, вы соглашаетесь с политикой конфиденциальности
Проработать технологию, подобрать станок и инструмент
Введение в кинематику машин
Введение
Предмет Кинематика машин, также известный как КОМ, является особым курсом для инженеров-механиков.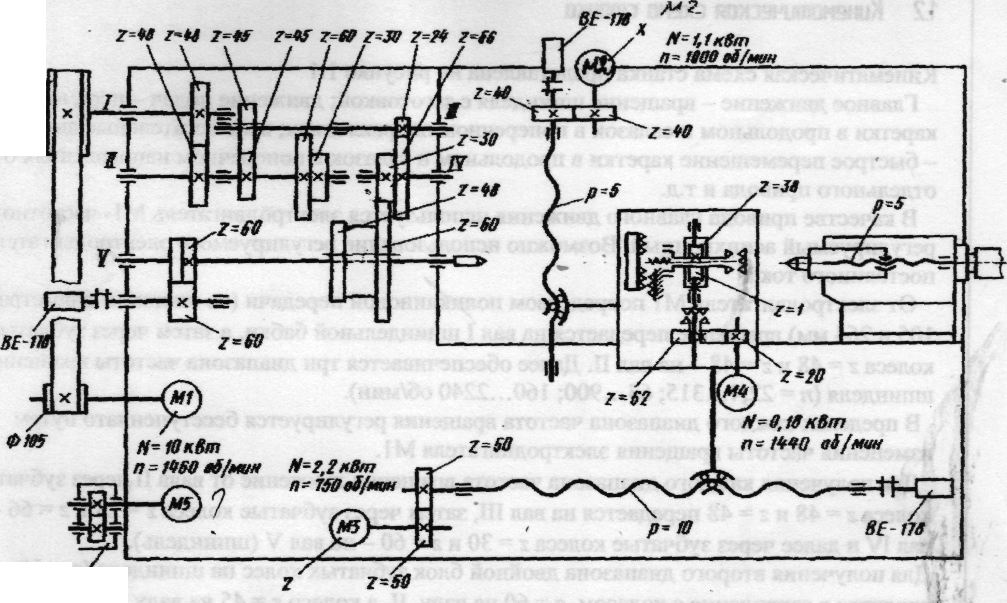 Этот курс рассказывает нам об отличительных особенностях машин. Это говорит нам о том, как работает машина. В этом курсе мы будем изучать работу машин. Как они работают? Какой будет скорость вывода, если задана некоторая входная скорость. Какой будет разгон и тд.
Этот курс рассказывает нам об отличительных особенностях машин. Это говорит нам о том, как работает машина. В этом курсе мы будем изучать работу машин. Как они работают? Какой будет скорость вывода, если задана некоторая входная скорость. Какой будет разгон и тд.
Итак, есть две части: одна — кинематика, а другая — машины. Сначала расскажем о кинематике.
Кинематика:
Кинематика — это раздел механики, который рассказывает нам о движении без учета причины движения. В этой части мы изучаем смещение, скорость и ускорение, не беспокоясь о входной силе или крутящем моменте.
Динамика:
В этом мы изучаем влияние силы и крутящего момента на объект. Мы изучаем выходную скорость, ускорение, когда задан входной крутящий момент или сила.
Предварительные требования к курсу:
Перед началом этого курса вы должны знать следующие предметы:
1. Векторы
2. Понятия перемещения, скорости и ускорения
3. Основы механики.
Основы механики.
4. И часть инженерной графики.
Машины:
Основной частью этого курса является изучение машин. Машина — это инструмент, который преобразует один вид энергии в некоторую полезную работу. Например, двигатель преобразует тепловую энергию в механическую энергию. Таким образом, двигатель будет машиной. Токарный станок преобразует электрическую энергию в полезную механическую работу, поэтому это машина.
Хотя мы подробно обсудим машину в более поздней части учебников, но основное определение таково: « машина представляет собой комбинацию твердых или устойчивых тел, сформированных и соединенных таким образом, чтобы они двигались с определенными относительными движениями. и передавать силу от источника энергии к сопротивлению, которое необходимо преодолеть. У машины есть две функции: передача определенного относительного движения и передача силы. Эти функции требуют силы и жесткости для передачи сил».
МЕХАНИЗМЫ И МАШИНЫ
Механизм: Механизм представляет собой связанную кинематическую цепь. Это означает, что движение любого одного звена кинематической цепи будет давать определенное и предсказуемое движение относительно каждого из остальных. Обычно одно из звеньев кинематической цепи закреплено в механизме.
Это означает, что движение любого одного звена кинематической цепи будет давать определенное и предсказуемое движение относительно каждого из остальных. Обычно одно из звеньев кинематической цепи закреплено в механизме.
Рис. 1.01 Кривошипно-шатунный и четырехрычажный механизмы.
Если для определенного положения звена цепи невозможно предсказать положение каждого из остальных звеньев цепи, то такая цепь называется неограниченной кинематической цепью и не является механизмом.
Рис.1.02 Неограниченная кинематическая цепь
Машина: Машина представляет собой механизм или совокупность механизмов, которые передают усилие от источника энергии к сопротивлению, которое необходимо преодолеть. Хотя все машины являются механизмами, все механизмы не являются машинами. Многие инструменты являются механизмами, но не машинами, потому что они не выполняют никакой полезной работы и не преобразуют энергию. Например. Механические часы, чертежник.
Многие инструменты являются механизмами, но не машинами, потому что они не выполняют никакой полезной работы и не преобразуют энергию. Например. Механические часы, чертежник.
Рис.1.03 Drafter
Плоские механизмы : Когда все звенья механизма имеют плоское движение, он называется плоским механизмом. Все звенья в плоском механизме перемещаются в плоскостях, параллельных базовой плоскости.
КИНЕМАТИЧЕСКИЕ СВЯЗИ
Звено или элемент: Это имя, данное любому телу, имеющему движение относительно другого. Все материалы обладают некоторой эластичностью. Жесткое звено – это звено, деформации которого настолько малы, что ими можно пренебречь при определении параметров движения звена.
Рис.1.04
Бинарная ссылка: Связь, которая соединена с другими ссылками в двух точках. (Рис.1.04 а)
Тернарная ссылка: Связь, которая соединяется с другими ссылками в трех точках. (Рис.1.04 б)
(Рис.1.04 б)
Четвертичная ссылка: Связь, которая соединяется с другими ссылками в четырех точках. (Рис.1.04 c)
Последнее обновление: четверг, 14 марта 2013 г.
Глава 2. Механизмы и простые машины
Йи Чжан
с
Сьюзен Фингер
Стефанни Беренс
Содержание
Механизм : основные физические или химические процессы
участвует или несет ответственность за действие, реакцию или другое естественное
явление.
Машина : набор частей, передающих силы, движение
и энергии в заданном порядке.
Простая машина : любой из различных элементарных механизмов, имеющих
элементы, из которых состоят все машины. Включен в
этой категории являются рычаг, колесо и ось, шкив, наклонная плоскость,
клин и винт.
Слово механизм имеет много значений. В кинематике механизм является средством
передача, контроль или ограничение относительного движения (Hunt 78). Движения, которые
Движения, которые
с электрическим, магнитным, пневматическим управлением исключены из
понятие механизма. Центральная тема для механизмов — жесткая
тела, соединенные между собой суставами.
Машина представляет собой комбинацию жестких или прочных корпусов,
образованы и связаны так, что они движутся с определенными относительными движениями
и передавать силу от источника энергии к сопротивлению,
превосходить. У машины две функции: передача определенных относительных
движения и передачи силы. Эти функции требуют силы
и жесткость для передачи сил.
Термин механизм применяется к комбинации
геометрические тела, составляющие машину или часть машины. А
механизм поэтому может быть определен как комбинация
твердые или сопротивляющиеся тела, сформированные и соединенные таким образом, что они движутся с
определенные относительные движения друг относительно друга (Ham и др. 58).
Хотя действительно твердого корпуса не существует, многие инженеры
компоненты являются жесткими, потому что их деформации и искажения
пренебрежимо малы по сравнению с их относительными движениями.
сходство между машинами и механизмами является
что
- обе комбинации твердых тел
- относительное движение твердых тел определено.
разница между станком и механизмом заключается в следующем.
что машины преобразуют энергию для выполнения работы, а механизмы — нет.
обязательно выполняют эту функцию. Термин Машины
обычно означает машины и механизмы. Рисунок 2-1
показывает изображение основной части дизельного двигателя.
механизм его цилиндро-шатунно-кривошипных частей представляет собой кривошипно-кривошипный механизм
механизм , как показано на рис. 2-2.
цилиндр в дизельном двигателе
2.1 Наклонная плоскость
На рис. 2-3а показан наклонный .
самолет , AB — основание, BC — высота, AC — наклон .
самолет . С помощью наклонной плоскости заданное сопротивление может
преодолеваться с меньшей силой, чем если бы самолет не использовался. За
Например, на рис. 2-3b предположим, что мы хотим поднять
вес 1000 фунтов через вертикальное расстояние до н.э. = 2 фута. Если это
вес был поднят вертикально и без использования наклонного
плоскости сила 1000 фунтов должна быть приложена через расстояние
ДО Н.Э. Если, однако, используется наклонная плоскость и вес перемещается
над его наклонной плоскостью АС сила всего 2/3 от 1000 фунтов или 667
фунт необходим, хотя эта сила действует на расстоянии AC
что больше расстояния BC.
Использование наклонной плоскости требует меньшего усилия
на большее расстояние, чтобы совершить определенную работу.
Пусть F представляет собой силу, необходимую для подъема заданного веса на
наклонная плоскость и W вес, который нужно поднять, мы имеем пропорцию:
2.
 1.1 Винтовой домкрат
1.1 Винтовой домкрат
Одно из наиболее распространенных применений принципа наклонная плоскость находится в винте
домкрат , который используется для преодоления сильного давления или подъема
большой вес W гораздо меньшей силой F , приложенной к
ручка. R обозначает длину ручки и P
шаг винта, или расстояние продвижения на один
полный поворот.
В пренебрежении трением используется следующее правило: Сила Ф
умножить на расстояние, которое он проходит за один полный оборот
равен произведению поднятого веса на расстояние, которое он преодолел
подняли за это же время. За один полный оборот конец ручки
описывает окружность 2 R . Это
расстояние, на котором действует сила F .
Поэтому из правила выше
а также
Предположим, что R равно 18 дюймам, P соответствует 1/8 дюйма, а вес
которую нужно поднять, равна 100 000 фунтов, тогда сила, необходимая при F
тогда 110 фунтов. Это означает, что, пренебрегая трением, 110 фунтов при
Это означает, что, пренебрегая трением, 110 фунтов при
F поднимет 100 000 фунтов на W , но вес поднялся
движется намного медленнее, чем сила, приложенная к F .
2.2 Шестерни
Шестерня или зубчатое колесо во время работы могут фактически
рассматривается как рычаг с дополнительной функцией, заключающейся в том, что его можно вращать
непрерывно, вместо того, чтобы раскачиваться вперед и назад в течение короткого
расстояние. Одним из основных соотношений для шестерни является число
зубьев, диаметр и скорость вращения зубчатых колес. На рис. 2-5 показаны концы двух валов A и B.
соединены двумя шестернями по 24 и 48 зубьев соответственно. Обратите внимание, что
большая шестерня сделает только пол-оборота, а меньшая сделает
полный поворот. То есть отношение скоростей (скоростей)
большое к меньшему как 1 к 2.
Шестерня, расположенная ближе к источнику энергии, называется
драйвер , а шестерня, получающая питание от драйвера,
называется ведомая шестерня .
2.2.1 Зубчатые передачи
Зубчатая передача может иметь несколько ведущих и несколько ведомых шестерен.
Когда шестерня А поворачивается один раз по часовой стрелке, шестерня В поворачивается 4 раза
против часовой стрелки, а шестерня C повернется один раз по часовой стрелке. Следовательно, шестерня B делает
не изменить скорость C по сравнению с тем, что было бы, если бы редуктор
прямо на передачу А, но она меняет свое направление с против часовой стрелки
по часовой стрелке.
Соотношение скоростей первой и последней передачи в простой зубчатой передаче.
доза не меняется, если между ними поставить любое количество шестерен.
На рис. 2-7 показаны составные шестерни , в которых
две шестерни на среднем валу. Шестерни B и D вращаются одновременно.
скорости, так как они соединены шпонкой (закреплены) с одним и тем же валом. Количество
количество зубьев на каждой шестерне указано на рисунке.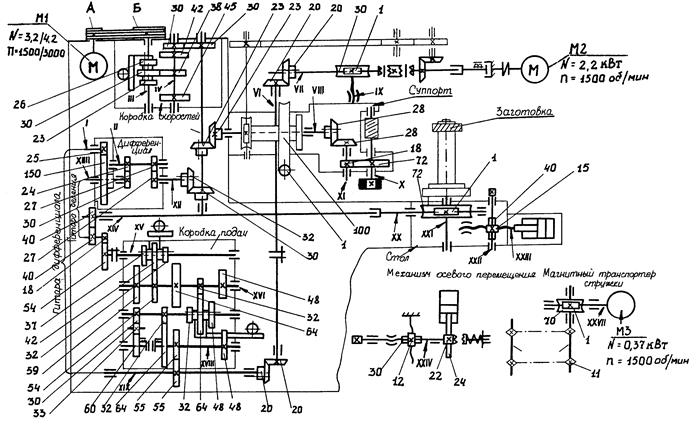 Учитывая эти числа, если
Учитывая эти числа, если
шестерня А вращается со скоростью 100 об/мин. по часовой стрелке, шестерня B поворачивается на 400
об/мин (оборотов в минуту) против часовой стрелки и шестерня C поворачивается на 1200
об/мин по часовой стрелке.
Рисунок 2-7
Составные шестерни
2.2.2 Передаточное число
Важно при работе с шестернями знать, какое количество зубьев
шестерни должны иметь так, чтобы они могли правильно зацепиться в зубчатой передаче.
Размер зубьев для соединения шестерен должен соответствовать друг другу.
2.3 Ремни и шкивы
Ремни и шкивы являются важной частью
большинство машин. Шкивы не что иное, как шестеренки без
зубы, и вместо того, чтобы двигаться вместе, они созданы для того, чтобы водить
друг друга с помощью шнуров, веревок, тросов или каких-либо ремней.
Как и в случае с зубчатыми колесами, скорость шкивов обратно пропорциональна
их диаметры.
Рисунок 2-8
Ремни и шкивы
Шкивы также могут быть расположены в виде блока и тали.
2.4 Рычаг
2.5 Колесо и ось
2,6 Клин
2.7 Эффективность машин
При отработке задач на рычаги , ремни и
шкивы , наклонные плоскости и пр. мы не брали
счет трения или других источников потери энергии. Другими словами,
мы предполагаем, что они совершенны, хотя на самом деле это не так. К
измерить производительность машины, мы часто находим ее
эффективность , которая определяется как
куда
- = эффективность
машины,- W в = ввод работы в машину, и
- W out = выходная работа машины.
- W в = ввод работы в машину, и
Содержание
Полное оглавление
- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 2.1 Наклонная плоскость
- 2.1.1 Винтовой домкрат
- 2.

- 2 Механизмы и простые машины
Всего комментариев: 0