Кинематика станка это: кинематическая схема токарного и фрезерного станков
Содержание
КИНЕМАТИКА СТАНКОВ | ОБРАБОТКА МЕТАЛЛОВ
Глава 3. Общие сведения о металлорежущих станках и технологическом процессе обработки на них
Для изготовления детали рабочим органам станка необходимо сообщить определенные согласованные движения, при которых с заготовки снимается избыточный материал — припуск (см.гл.2).
В станках бывает вращательное или поступательное (возвратно-поступа¬тельное) движение резания, сообщаемое заготовке или режущему инстру¬менту. На всех изучаемых станках — токарных, фрезерных, сверлильных и шлифовальных, — движение резания вращательное. На станках для лезвий¬ной обработки резанием (токарных, фрезерных, сверлильных) скорость ре¬зания (м/мин) определяется по формуле: v=пdn/1000, где d — диаметр обра¬батываемой поверхности заготовки или инструмента, мм; n — частота их вращения, мин1 (об/мин). Для шлифовальных станков (при абразивной об¬работке) скорость резания (м/с) vшл=пdкрnКр/(1000-60).
Движение подачи непрерывное на токарных, фрезерных и сверлильных станках. На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
Кинематическая схема станка представляет собой схему, на которой с по¬мощью условных обозначений изображаются звенья механизмов и кинема¬тические пары с указанием размеров, необходимых для кинематического анализа. Зависимость движений, связанных между собой элементов передач и механизмов определяется кинематической связью. Каждая связь состоит из механических, электрических, гидравлических и других кинематических це¬пей, по которым осуществляется передача движения. Кинематические цепи обеспечивают также изменение скоростей и направления движения испол¬нительных органов, в т.ч. при неизменной скорости привода (электродвига¬теля), преобразование и суммирование движений и т.п. Кинематические це¬пи состоят из отдельных звеньев. Элементы кинематических цепей (ГОСТ 2.770-68*) изображаются в ЕСКД1 на схемах условными обозначениями (табл. 3.1).
3.1).
Для станков, имеющих наряду с механическими передачами гидравличе¬ские, электрические и пневматические устройства, составляются соответст¬вующие гидравлические, электрические и пневматические схемы.
Элементы расчета кинематических цепей. Основным кинематическим параметром, характеризующим все виды механических передач вращатель¬ного движения и необходимым для определения показателей промежуточ¬ных и выходных элементов устройств приводов в станках, является отноше-
3.1. Условное обозначение элементов кинематики
ние i2 частоты вращения n — ведомого вала II(рис.3.1,а) к частоте вращения n1 ведущего вала (мин1):Следовательно, для ременной передачи (рис.3.1,6) i=d1/d2, где d1 и d2 — диаметр соответственно ведущего и ведомого шкивов; для зубчатых (рис.3.1,а) и цепных передач i=z1/z2, где z1 и z2 — число зубьев соответственно ведущего и ведомого колес или ведущей и ведомой звездочек; для червячной передачи (рис.3.1,в) i’=K/z, где К— число заходов червяка; г — число зубьев червячного колеса.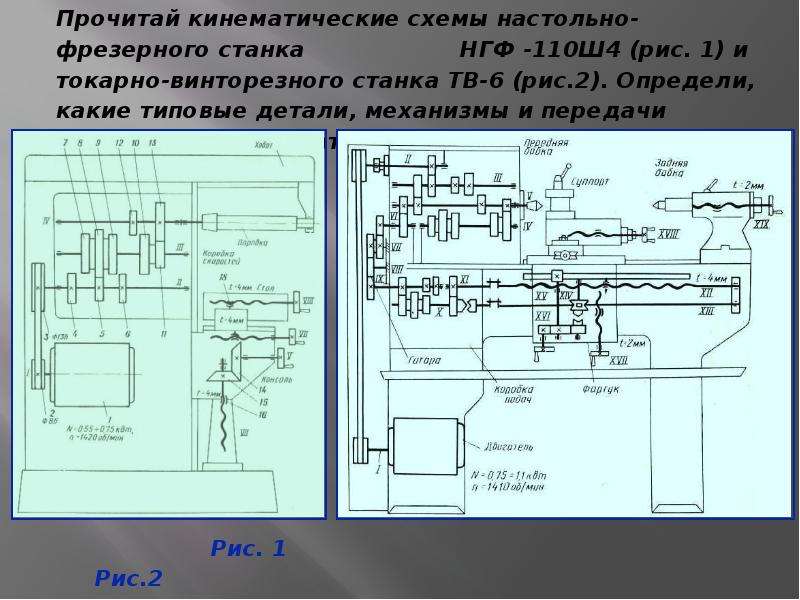
Рис.3.1. Передачи в станках:
а — зубчатая; б — ременная; в — червячная; г — винтовая; д — реечная
При последовательном расположении нескольких передач соотношение характеристик движения начального nн и конечного nк элементов кинемати¬ческой цепи определяется произведением отношений Г отдельных передач:
Передачи, преобразующие вращательное движение в поступательное, ха¬рактеризуются расстоянием, на которое поступательно перемещается дви¬жущийся элемент за один оборот приводного. Так, для передачи винт-гайк2 перемещение винта (рис.3.1,г), l=РК, где Р— шаг винта, мм; К— число за¬ходов винта.
Реечная передача характеризуется расстоянием l, на которое перемеша¬ется рейка (мм) за один оборот зубчатого колеса (рис.3.1.д): 1=пmz, где г — число зубьев; т — модуль, мм.
Скорость перемещения (мм/мин) конечного элемента (узла) кинемати¬ческой цепи vк=пнi’0бЩl.
Математическое выражение связи движений ведущего и ведомого эле¬ментов (начального и конечного звеньев) кинематической цепи станка на¬зывается уравнением кинематического баланса. В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
Для станков с главным вращательным движением предельные значения частот вращения шпинделя nmin и nmах обеспечивают обработку заготовки с диаметром обрабатываемых поверхностей в диапазоне от dmах до dmin.
Диапазон регулирования частоты вращения шпинделя определяется отношение
наибольшей частоты вращения шпинделя станка к наименьшей: D=nmax/NMIN. ЭТОТ диапазон характеризует эксплуатационные возможности станка.
ЭТОТ диапазон характеризует эксплуатационные возможности станка.
Значения частот вращения от nmin до nmax образуют ряд. В станкостроении, как правило, применяют геометрический ряд, в котором смежные значения и различаются в ф раз (ф — знаменатель ряда): n2/n1=n3/п2=n4/n3=…=nj/nj-1=ф. Приняты и нормализованы следующие знаменатели ф: 1,06; 1,12; 1,26, 1,41; 1.58; 1,78; 2,00. Значения указанных знаменателей ф положены в основу таб¬личных рядов частот вращений шпинделя.
Автор — nastia19071991
Схема кинематики токарного станка
Токарные станки составляют основную часть станочного парка многих металлообрабатывающих предприятий. Токарные станки используются для обработки внутренних и наружных поверхностей тел вращения. Режущим инструментом выступают резцы, сверла, развертки, зенкера, метчики и плашки. При помощи специальных приспособлений, таких как планшайбы, на токарных станках можно обрабатывать сложные и неправильные формы. Использование специальных устройств расширяет возможности оборудования, позволяет выполнять многие другие операции машинной обработки металла.
Расположение шпинделя — вала, на котором закрепляется патрон с обрабатываемой заготовкой, определяет всю конструкцию станка. Более распространены станки с горизонтальным расположением шпинделя, ими являются токарно-винторезные, револьверные, лоботокарные станки. Вертикальный шпиндель имеют токарно-карусельные станки, они предназначены для обработки низких заготовок большого диаметра.
Строение токарно-винторезного станка
Токарно-винторезные станки имеют максимальные технологические возможности из всего оборудования этой группы, что позволяет их эффективно использовать для изготовления небольших серий изделий. Конструкция этих станков была разработана в первой половине XIX века и с тех пор были внесены только небольшие изменения, касающиеся автоматизации оборудования.
Рис.: 1 – передняя бабка с коробкой скоростей, 2 – гитара сменных колес, 3 – коробка подач, 4 – станина, 5 – фартук, 6 – суппорт, 7 – задняя бабка, 8 – шкаф с электрооборудованием.
Как и у большинства промышленного оборудования, основой этого станка выступает станина. Она выполняется литьем или сваркой и обязательно крепится к полу анкерными болтами. С левой стороны относительно рабочего на станине располагается передняя или шпиндельная бабка. Она представляет собой пустотелый корпус, в котором находятся, шестерни, шпиндель, подшипники, система смазки и переключения диапазонов. На передней панели бабки находятся многочисленные элементы управления станком. Шпиндель выходит из передней бабки в рабочую зону. На шпиндель устанавливаются приспособления для удержания заготовки, основная часть которых — патроны с разным количеством кулачков.
Ниже передней бабки располагается коробка подач. На её передней панели находятся регуляторы для управления подачей. Коробка подач передает вращение на фартук, располагающийся в центральной зоне станка, при помощи вала при обработке поверхностей или винта при нарезке резьбы. Винт располагается над валом, на большей части его длины нарезана червячная спираль. Вал имеет более короткую спираль червячной передачи, но большего диаметра. В фартуке находится механизм, который преобразует вращательное движение вала или винта в возвратно-поступательное движение суппорта.
Вал имеет более короткую спираль червячной передачи, но большего диаметра. В фартуке находится механизм, который преобразует вращательное движение вала или винта в возвратно-поступательное движение суппорта.
Суппорт является элементом станка, на котором устанавливается основной инструмент. Нижние салазки суппорта перемещаются по продольным направляющим, расположенным на станине. Сверху находятся верхние салазки, они расположены перпендикулярно к нижним. Перемещающаяся по ним резцовая каретка имеет возможность повтора в горизонтальной плоскости. На ней находится резцедержатель, в котором закрепляется инструмент. Таким образом, конструкция суппорта и направляющих станины обеспечивает инструменту возможность продольного и поперечного движения, а также наклона относительно центра. Это позволяет обрабатывать инструментом цилиндрические и конические поверхности.
На противоположной стороне станка, с правой стороны, располагается задняя бабка. При обработке длинных заготовок она используется как вторая точка опора, помимо шпинделя. Также на ней размещается инструмент, выполняющий сверление или обработку осевого отверстия в заготовке.
Также на ней размещается инструмент, выполняющий сверление или обработку осевого отверстия в заготовке.
Кинематическая схема токарно-винторезного станка
Главное движение станка осуществляется односкоростным асинхронным трехфазным двигателем, в редких случаях многоскоростным.
Движение с двигателя передается на коробку скоростей посредством клиноременной передачи. В коробке скоростей находится 6-8 валов с зубчатыми колесами. Валы для удобства нумеруются римскими цифрами, первым идет вал со шкивом, далее по кинематике. Выбирая используемые передачи, можно регулировать скорость вращения шпинделя в широких пределах. На токарных станках можно получить более 20 различных скоростей вращения шпинделя с закрепленной на ней заготовкой. Для обратного вращения шпинделя предусмотрены две фрикционные муфты.
Перемещение фартука через коробку подач производится либо напрямую от шпинделя, либо через звено повышения шага, которое находится в коробке скоростей. Оно состоит из трех зубчатых передач, понижающих частоту вращения. Далее находится механизм реверса, который обеспечивает возможность перемещения фартука с суппортом в оба направления.
Оно состоит из трех зубчатых передач, понижающих частоту вращения. Далее находится механизм реверса, который обеспечивает возможность перемещения фартука с суппортом в оба направления.
Коробка подач обладает двумя кинематическими схемами. Первая предназначена для формирования дюймовой резьбы, она содержит одну фрикционную муфту и передает вращение на ходовой винт. Вторая схема предназначена для обработки поверхностей, нарезки метрических резьб. Она передает вращение на ходовой вал. Управление второй цепью производится тремя фрикционными муфтами.
Ряд зубчатых передач находится в фартуке. Они преобразуют вращение вала и винта в передвижение суппорта. Отдельной частью кинематической схемы станка выступает механизм быстрого перемещения суппорта. Он приводится в действие дополнительным электродвигателем посредством ременной передачи.
Предыдущая статья
Следующая статья
Получить консультацию
по инструменту, методам обработки, режимам или подобрать необходимое оборудование можно связавшись с нашими менеджерами или отделом САПР
Также Вы можете подобрать и приобрести режущий инструмент и оснастку к станку, производства Тайваня, Израиля
Отправляя заявку, вы соглашаетесь с политикой конфиденциальности
Проработать технологию, подобрать станок и инструмент
Введение в кинематику машин
Введение
Предмет Кинематика машин, также известный как КОМ, является особым курсом для инженеров-механиков.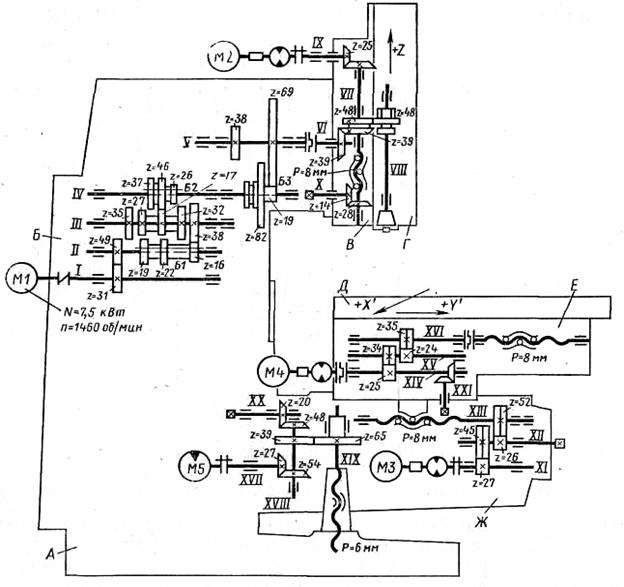 Этот курс рассказывает нам об отличительных особенностях машин. Это говорит нам о том, как работает машина. В этом курсе мы будем изучать работу машин. Как они работают? Какой будет скорость вывода, если задана некоторая входная скорость. Какой будет разгон и тд.
Этот курс рассказывает нам об отличительных особенностях машин. Это говорит нам о том, как работает машина. В этом курсе мы будем изучать работу машин. Как они работают? Какой будет скорость вывода, если задана некоторая входная скорость. Какой будет разгон и тд.
Итак, есть две части: одна — кинематика, а другая — машины. Сначала расскажем о кинематике.
Кинематика:
Кинематика — это раздел механики, который рассказывает нам о движении без учета причины движения. В этой части мы изучаем смещение, скорость и ускорение, не беспокоясь о входной силе или крутящем моменте.
Динамика:
В этом мы изучаем влияние силы и крутящего момента на объект. Мы изучаем выходную скорость, ускорение, когда задан входной крутящий момент или сила.
Предварительные требования к курсу:
Перед тем, как начать этот курс, вы должны владеть следующими предметами:
1. Векторы
2. Понятия перемещения, скорости и ускорения
3. Основы механики.
Основы механики.
4. И часть инженерной графики.
Машины:
Основной частью этого курса является изучение машин. Машина — это инструмент, который преобразует один вид энергии в некоторую полезную работу. Например, двигатель преобразует тепловую энергию в механическую энергию. Таким образом, двигатель будет машиной. Токарный станок преобразует электрическую энергию в полезную механическую работу, поэтому это машина.
Хотя мы подробно обсудим машину в более поздней части учебников, но основное определение таково: « машина представляет собой комбинацию твердых или устойчивых тел, сформированных и соединенных таким образом, чтобы они двигались с определенными относительными движениями. и передавать силу от источника энергии к сопротивлению, которое необходимо преодолеть. У машины есть две функции: передача определенного относительного движения и передача силы. Эти функции требуют силы и жесткости для передачи сил».
МЕХАНИЗМЫ И МАШИНЫ
Механизм: Механизм представляет собой связанную кинематическую цепь.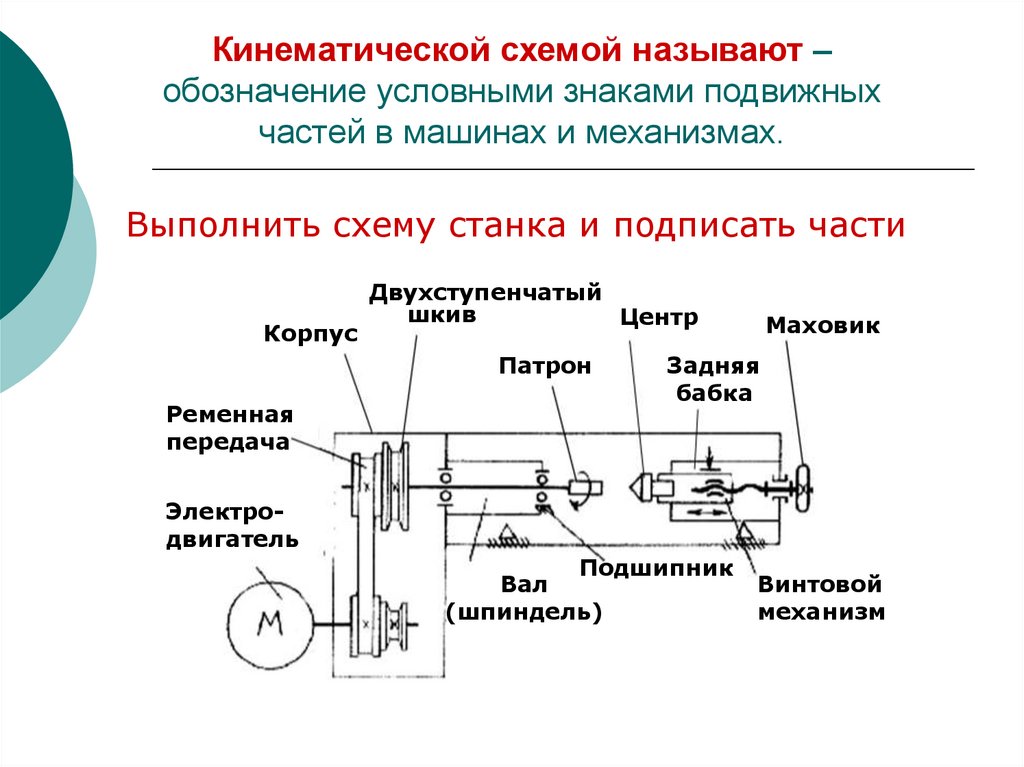 Это означает, что движение любого одного звена кинематической цепи будет давать определенное и предсказуемое движение относительно каждого из остальных. Обычно одно из звеньев кинематической цепи закреплено в механизме.
Это означает, что движение любого одного звена кинематической цепи будет давать определенное и предсказуемое движение относительно каждого из остальных. Обычно одно из звеньев кинематической цепи закреплено в механизме.
Рис. 1.01 Кривошипно-шатунный и четырехрычажный механизмы.
Если для определенного положения звена цепи невозможно предсказать положение каждого из других звеньев цепи, то такая цепь называется неограниченной кинематической цепью и не является механизмом.
Рис.1.02 Неограниченная кинематическая цепь
Машина: Машина представляет собой механизм или совокупность механизмов, которые передают усилие от источника энергии к сопротивлению, которое необходимо преодолеть. Хотя все машины являются механизмами, все механизмы не являются машинами. Многие инструменты являются механизмами, но не машинами, потому что они не выполняют никакой полезной работы и не преобразуют энергию. Например. Механические часы, чертежник.
Многие инструменты являются механизмами, но не машинами, потому что они не выполняют никакой полезной работы и не преобразуют энергию. Например. Механические часы, чертежник.
Рис.1.03 Drafter
Плоские механизмы : Когда все звенья механизма имеют плоское движение, он называется плоским механизмом. Все звенья плоскостного механизма перемещаются в плоскостях, параллельных базовой плоскости.
КИНЕМАТИЧЕСКИЕ СВЯЗИ
Звено или элемент: Это имя, данное любому телу, имеющему движение относительно другого. Все материалы обладают некоторой эластичностью. Жесткое звено — это звено, деформации которого настолько малы, что ими можно пренебречь при определении параметров движения звена.
Рис.1.04
Бинарная ссылка: Связь, которая соединена с другими ссылками в двух точках. (Рис.1.04 а)
Тернарная ссылка: Связь, которая соединяется с другими ссылками в трех точках. (Рис.1.04 б)
(Рис.1.04 б)
Четвертичная ссылка: Связь, которая соединяется с другими ссылками в четырех точках. (Рис.1.04 c)
Последнее обновление: Четверг, 14 марта 2013 г.
Кинематика — Мех. Исполнение
Кинематика относится к как наши машины перемещаются в космосе.
Компоновка
Выбор подходящей компоновки машины, вероятно, является одной из первых вещей, которые мы делаем, когда думаем о новой машине: это в основном «в каком порядке оси соединяются болтами друг с другом», и есть несколько прототипов форм мы можем видеть, чтобы сориентироваться:
Вертикальная мельница (VMC)
- XY «стол»
- Z «вертикальный»
Это современный родственник коленных мельниц. Обратите внимание на большую консоль на оси Z: это, как правило, большие машины с их объемами сборки.
VMC — это классическая рабочая лошадка, а не непреодолимый для сборки в лаборатории. Посмотрите этот канал на YouTube, чтобы увидеть самодельную конструкцию из эпоксидного гранита весом 700 кг.
For a more reasonably sized homebrew VMC, see:
Bed Mill / Gantry Machines
- XY “gantry” and fixed bed
- Z Axis mounted to X Gantry
These are typically “ широкие и плоские» и отдавать приоритет скорости перемещения по осям XY. Как правило, они имеют примерно такой же размер, как и их рабочие объемы, что делает их подходящими для крупноформатной обработки (т. е.) заготовки размером 4×8 футов или более. Складской материал обычно имеет листовую форму.
5 Axis
Есть несколько способов снять шкуру с кота 5ax, и можно спорить, какой из них лучше. Для пятиосевого станка у нас, по сути, есть все степени свободы, которые могут нам понадобиться для обработки любой геометрии (поскольку 6-я ось, вращение вдоль оси шпинделя, является избыточной), но различные компоновки предлагают различную жесткость и «досягаемость» — как легко перемещать инструмент, т. е. на нижнюю сторону заготовки. Крепление детали здесь также становится важным!
е. на нижнюю сторону заготовки. Крепление детали здесь также становится важным!
Рычаги Scara
Рычаги «Scara» представляют собой машины с двумя или тремя степенями свободы (с добавлением Z), обычно предназначенные для быстрого движения: вращающиеся соединения легче вращать, чем поднимать большую ось над тем же рабочим пространством. Кроме того, они занимают небольшую площадь относительно своей рабочей зоны.
Построение Scara включает также решение обратной кинематики для перевода из декартовых положений в углы сочленения,
из How To Mechatronics
Двойные руки Scara («параллельные роботы») также существуют,
Роботы Delta
Роботы-манипуляторы
Они повсюду и обычно используются для погрузочно-разгрузочных работ / «общей» автоматизации.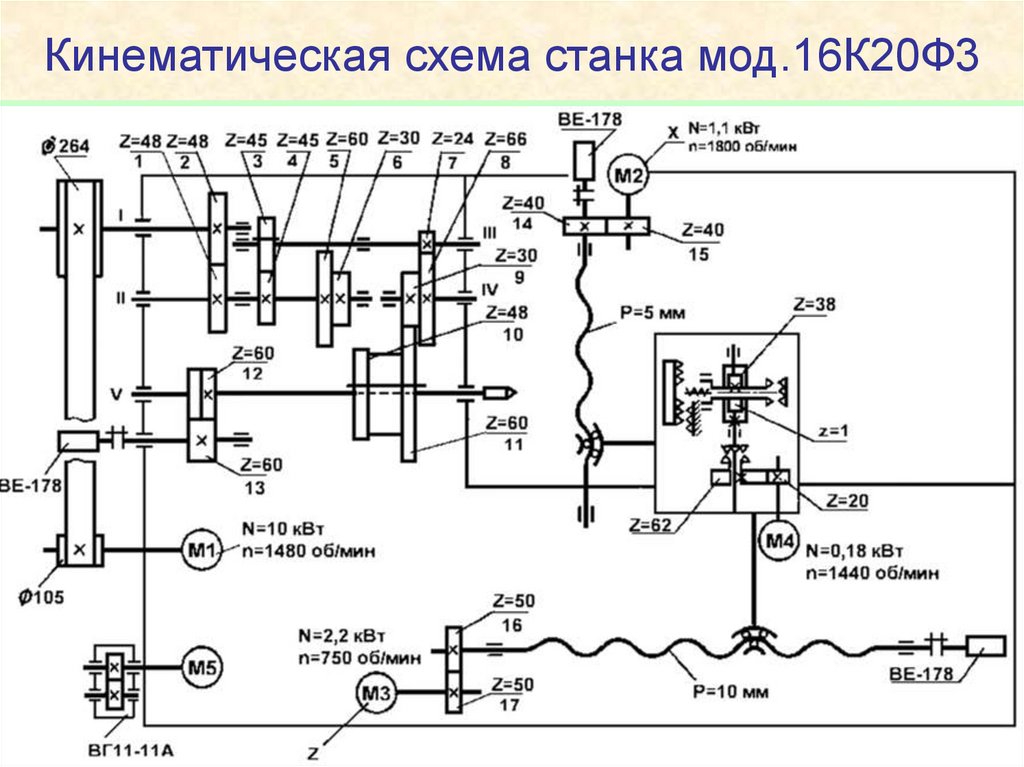 Они представляют собой длинные передние цепи вращающихся преобразователей, и редукторы/приводы, способные создавать достаточный крутящий момент (при достаточно малом весе), остаются дорогими.
Они представляют собой длинные передние цепи вращающихся преобразователей, и редукторы/приводы, способные создавать достаточный крутящий момент (при достаточно малом весе), остаются дорогими.
Рука робота с 6 степенями свободы может удерживать любую «позу» (3 позиции, 3 вращения) только с одним решением (фактическая ориентация руки), но некоторые новые руки включают 7 степеней свободы, так что они могут принимать любую позу сохраняя при этом «нулевое пространство», в котором суставы робота могут вращаться в диапазоне возможных ориентаций, сохраняя при этом положение конечного эффектора. Это позволяет перемещать манипулятор робота в сторону от препятствий в рабочей среде, сохраняя положение рабочего органа:
И т.д.!
Существует бесконечно много вариантов кинематики машин, как я уже говорил ранее, эти списки невелики.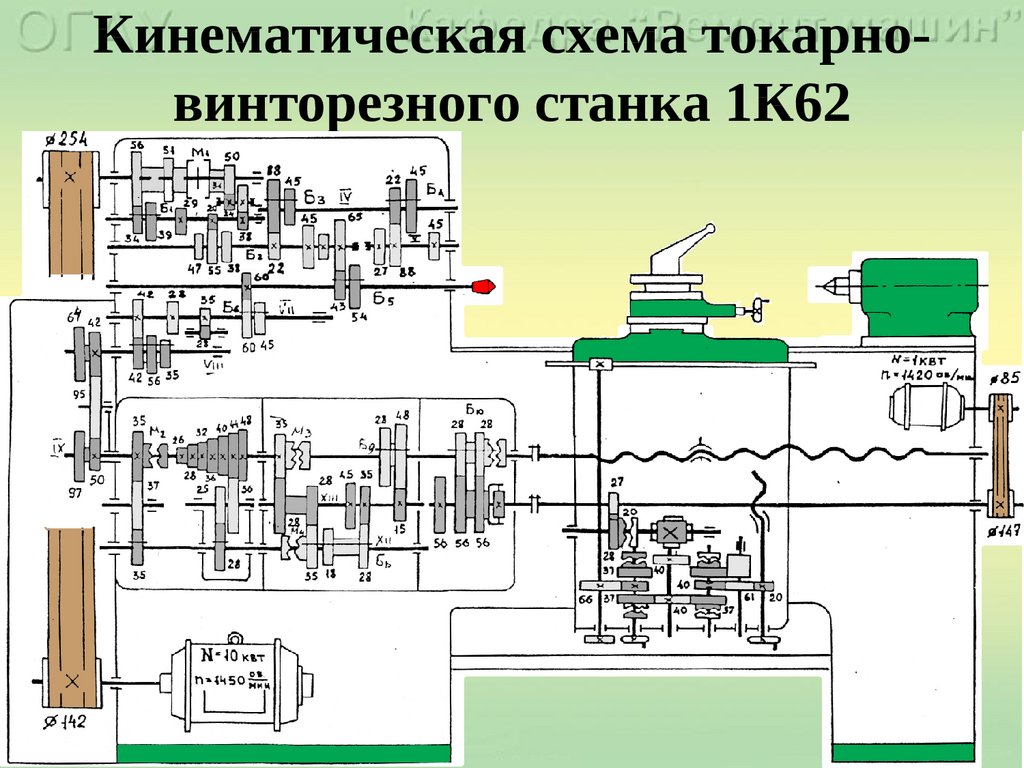 Мы можем лучше использовать наше время, чтобы попытаться понять некоторые нюансы, которые могут возникнуть, когда мы проектируем эти вещи.
Мы можем лучше использовать наше время, чтобы попытаться понять некоторые нюансы, которые могут возникнуть, когда мы проектируем эти вещи.
Матрицы преобразования
from Northwestern
Если нам нужно (как правило, только когда у нас есть поворотные соединения), мы можем сформулировать кинематику машины в терминах однородных матриц преобразования или HTM — здесь из некоторого «наземного» отсчетного пространства (или мировой системы координат WCS ) мы можем выразить каждое последующее положение оси как некоторое произведение HTM.
Ограничение
В то время как компоновка машины очевидна, способ кинематических ограничений машины часто более тонкий. Понимание кинематического ограничения может иметь огромное значение при проектировании машин, но его часто упускают из виду.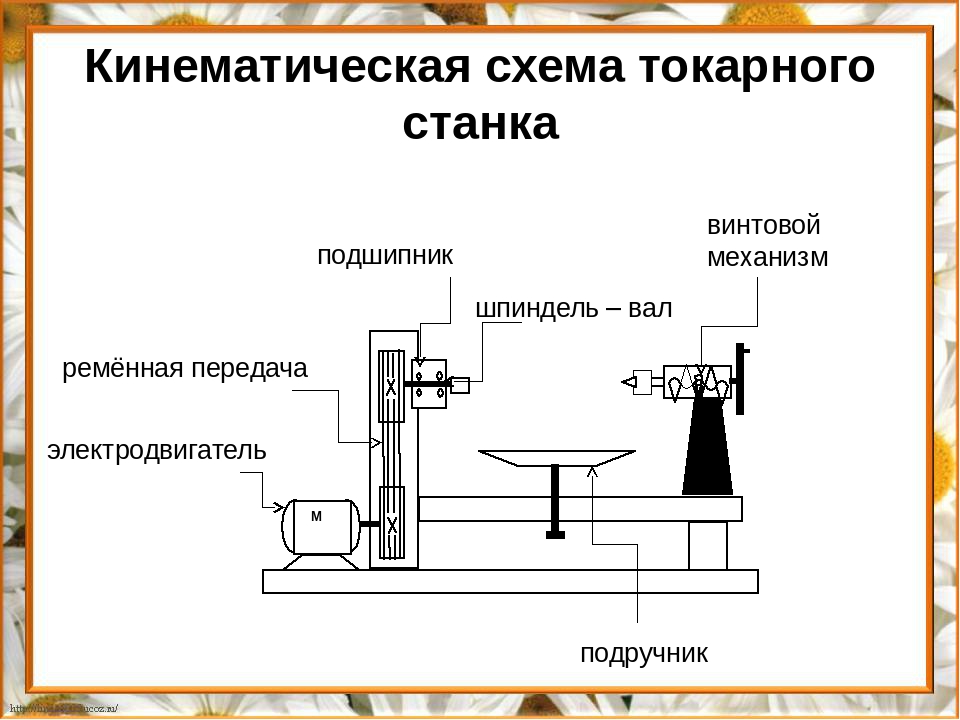
Есть и другие люди, которые справляются с этим лучше, чем я, поэтому я бы указал нам на этот PDF-файл из Университета Аризоны.
от Practical Precision
Мы обычно знакомимся с этой идеей через кинематические связи , которые точно ограничивают один жесткий контакт между двумя телами по всем 6 степеням свободы. Slocum сделал их обзор в 2010 году, откуда взято это изображение:
Мы видим, что оно состоит из элементов предыдущего изображения. На практике мы чаще всего встречаем их в устройствах смены инструмента, таких как Джошуа Васкес:
Или в таких оптических креплениях:
Большинство кинематических креплений имеют низкую жесткость , потому что точки контакта должны быть исчезающе малыми (конечно, на практике они никогда не бывают такими, и Hertz Stress — это то, с чего нужно начать, чтобы понять почему), и поэтому мы редко видим кинематические крепления, используемые в приложениях с высокими нагрузками, таких как фрезерование с ЧПУ.
Мое собственное устройство смены инструмента также представляет собой кинематическое крепление, хотя оно немного нетрадиционно (сделано для простоты изготовления и приведения в действие), вы можете отслеживать этот проект здесь.
Не только муфты
Кинематика — это не только муфты. Один из способов подумать об этом: каждая из наших матриц преобразования имеет одну «свободную» или неограниченную степень свободы: степень свободы, которая активируется на этом стыке. Кинематика примерно точно ограничивает все остальные степени свободы в матрице без «связывания» свободной степени свободы.
Я думаю, что у меня есть время только для одного из этих примеров, но он самый распространенный: если мы рассмотрим портальный станок с двумя осями Y, например, clank:
Это означает, что когда двигатели выключены , ось Y может немного вращаться в плоскости XY:
Но когда двигатели включены, это полностью ограничено. Если бы сборка Y-Left и Y-Right были идентичными, Clank был бы чрезмерно ограничен.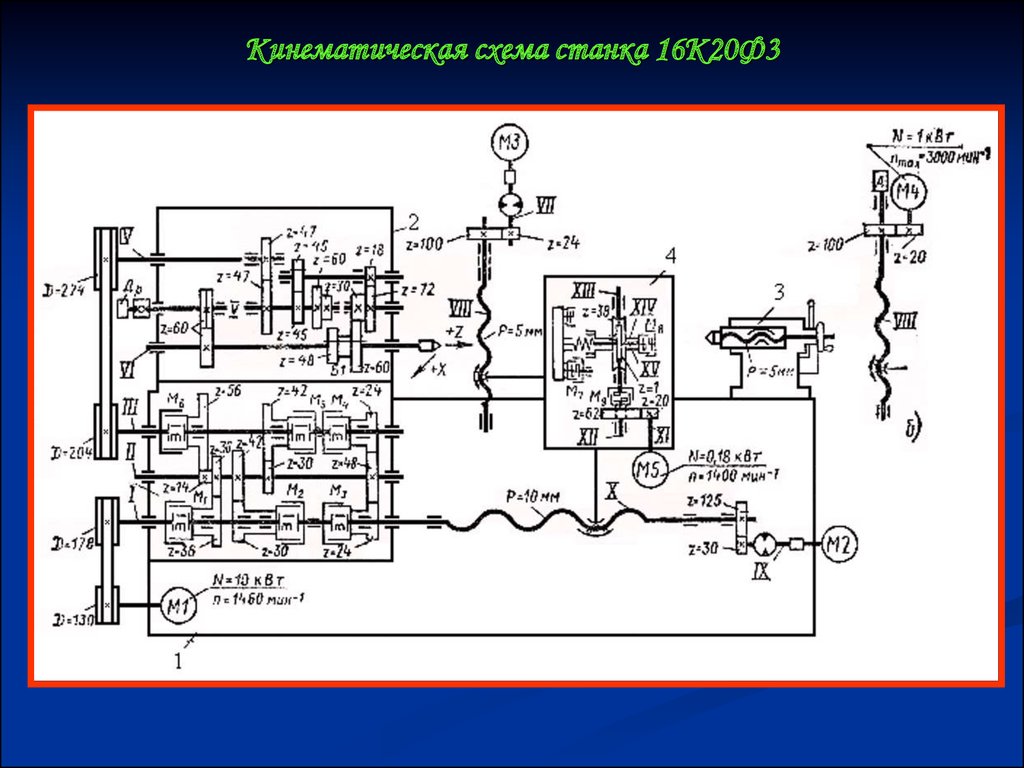 Стоит отметить, что если бы мы написали подходящий контроллер для Clank, мы могли бы управлять этим небольшим вращением в плоскости XY оси Y: машина имеет «три оси», но четыре двигателя: с помощью дифференциального привода на Y-левый и Двигатели Y-Right позволили бы использовать здесь «свободную» глубину резкости. На практике двигатели просто отражают друг друга.
Стоит отметить, что если бы мы написали подходящий контроллер для Clank, мы могли бы управлять этим небольшим вращением в плоскости XY оси Y: машина имеет «три оси», но четыре двигателя: с помощью дифференциального привода на Y-левый и Двигатели Y-Right позволили бы использовать здесь «свободную» глубину резкости. На практике двигатели просто отражают друг друга.
Самое главное, эта конструкция означает, что левая Y-рельс и правая Y-рельс не обязательно должны быть идеально параллельны — поскольку правая Y-образная сборка не имеет ограничений по оси X, рельс на этой стороне может «перемещаться». », не заставляя два X-ограничения бороться друг с другом.
Итак: немного тонко, немного скучно, и его легко игнорировать, но тщательный кинематический дизайн — это то, что может заставить вашу машину скользить вот так: случай неустойчивых (недосвязанных), устойчивых (хорошо связанных) и неопределенных (сверхсвязанных) фреймов. В некотором смысле структурная устойчивость и кинематическое ограничение — одно и то же.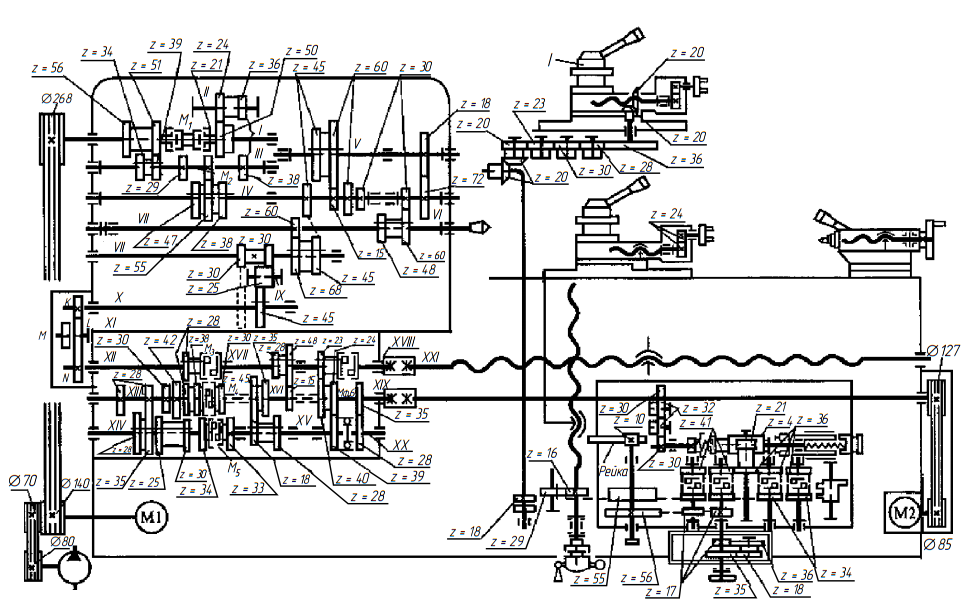
Всего комментариев: 0