Механический манипулятор своими руками: Дешевый и полнофункциональный робот-манипулятор своими руками / Хабр
Содержание
Робот манипулятор своими ркуами
СКАЧАТЬ
-
Рейтинг:
-
Сложность:
Средняя -
Файлов:
3 шт. -
Деталей:
7 шт.
Все мы давно знаем промышленных роботов манипуляторов. Но теперь их легко можно сделать своими руками! Робот манипулятор на ардуино не только легко собирается из 3D печатных деталей, но и достаточно просто управляется! 3D модель робота манипулятора скачать без регистрации и совершенно бесплатно всегда можно на нашем сайте!
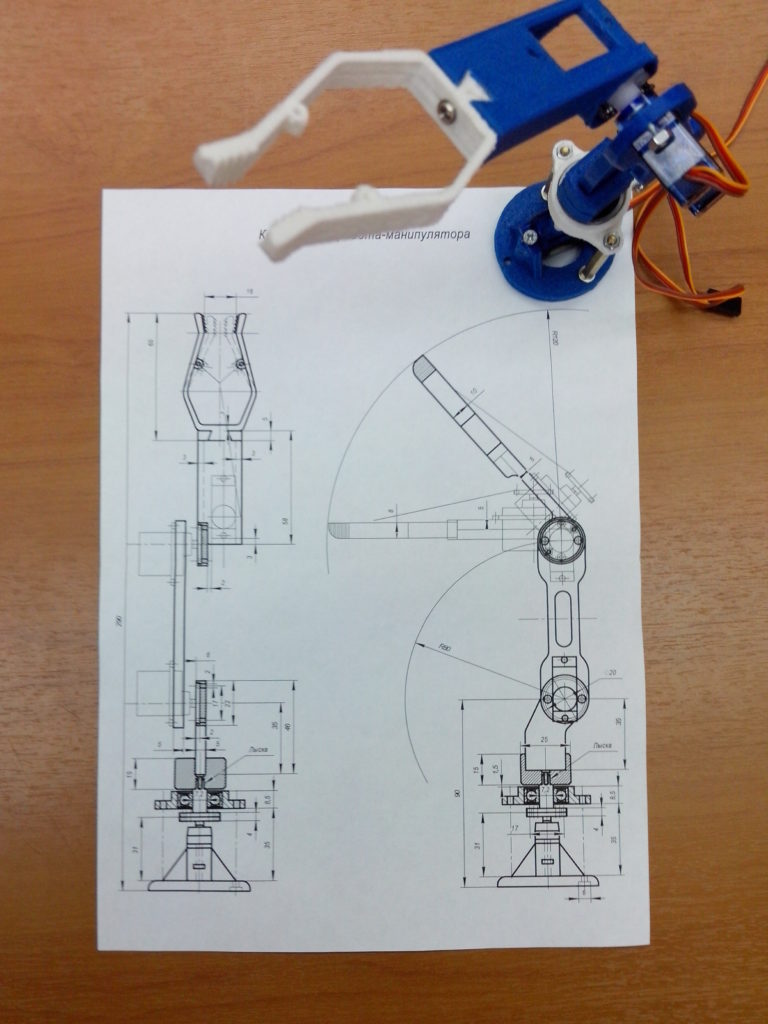
Наглядная схема робота манипулятора, или так называемой Роборуки, изображена на картинках. Скачать 3D модели можно одним архивом. Далее, для просмотра и печати 3D деталей на принтере, Вам понадобиться программа Repetier Host, о которой мы неоднократно писали в наших статьях.
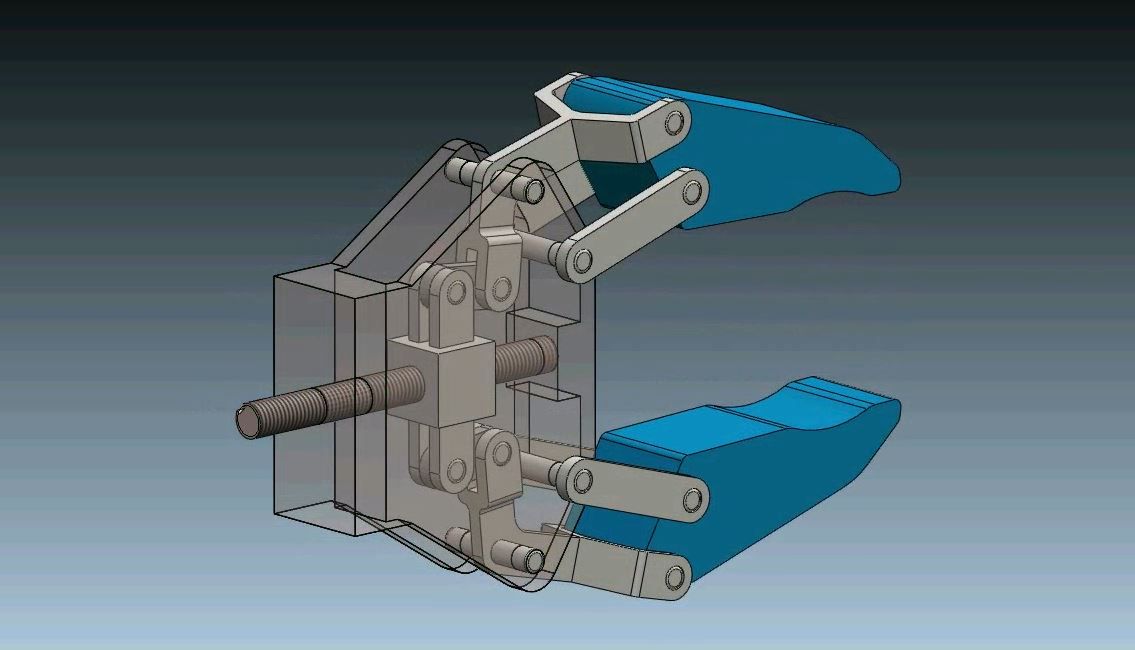
Из особенностей данного робота на платформе Arduino можно отметить сложность его конструкции. Роборука состоит из множества рычагов, которые позволяют ей двигаться по всем осям, хватать и перемещать различные вещи, используя всего 4 серво-мотора. Собрав собственными руками такого робота, Вы точно сможете удивить своих друзей и близких возможностями и приятным видом данного устройства! Помните, что для программирования Вы всегда сможете воспользоваться нашей графической средой RobotON Studio!
Роборука состоит из множества рычагов, которые позволяют ей двигаться по всем осям, хватать и перемещать различные вещи, используя всего 4 серво-мотора. Собрав собственными руками такого робота, Вы точно сможете удивить своих друзей и близких возможностями и приятным видом данного устройства! Помните, что для программирования Вы всегда сможете воспользоваться нашей графической средой RobotON Studio!
Если у Вас появятся вопросы или замечания, мы всегда на связи! Создавайте и выкладывайте свои результаты!
Особенности:
Чтобы собрать робота манипулятора своими руками, вам понадобится довольно много компонентов. Основную часть занимают 3D печатные детали, их около 18 штук (печатать горку необязательно).Если вы скачали и распечатали все необходимое, то вам потребуются болты, гайки и электроника:
- 5 болтов М4 20мм, 1 на 40 мм и соответствующие гайки с защитой от раскрутки
- 6 болтов М3 10мм, 1 на 20 мм и соответствующие гайки
- Макетка с соединительными проводами или шилд
- Arduino Nano
- 4 серво мотора SG 90
После сборки корпуса ВАЖНО убедиться в его свободной подвижности. Если ключевые узлы Роборуки двигаются с трудом, серво-моторы могут не справиться с нагрузкой. Собирая электронику, необходимо помнить, что подключать цепь к питанию лучше после полной проверки соединений. Чтобы избежать поломки серво-приводов SG 90, не нужно крутить руками сам мотор, если нет необходимости. В случае, если нужно разработать SG 90, нужно плавно подвигать вал мотора в разные стороны.
Если ключевые узлы Роборуки двигаются с трудом, серво-моторы могут не справиться с нагрузкой. Собирая электронику, необходимо помнить, что подключать цепь к питанию лучше после полной проверки соединений. Чтобы избежать поломки серво-приводов SG 90, не нужно крутить руками сам мотор, если нет необходимости. В случае, если нужно разработать SG 90, нужно плавно подвигать вал мотора в разные стороны.
Характеристики:
- Простое программирование ввиду наличия малого количества моторов, причем одного типа
- Наличие мертвых зон для некоторых серво-приводах
- Широкая применимость робота в повседневной жизни
- Интерсная инженерная работа
- Необходимость использования 3D принтера
Комментарии:
Промышленный робот манипулятор |Роботы-манипуляторы для паллетирования
Улучшенный пылезащитный и брызгозащитный корпус IP54 (5/6 осей).
· Быстрая связь с другими компонентами через CAN интерфейс.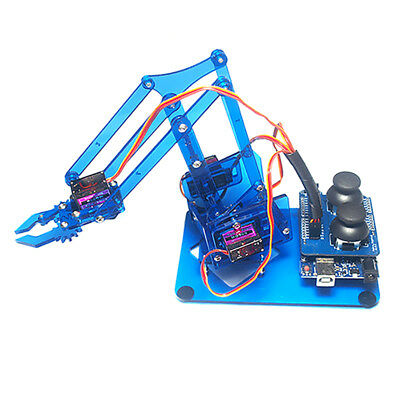
· Ускоренные и сглаженные движения.
· Система снижения вибраций при перемещении.
· Открытая архитектура.
· Функции PLC-контроллера.
· Большой объем памяти.
· Функция подключения к компьютерной сети предприятия.
· Опционально возможный дисплей с сенсорным экраном.
· Опционально возможна функция осциллографа
Цена: от 110000 €
Они подходят для шлифования и фрезерования. Также возможны такие применения, как паллетирование и распыление.
Тип KR16 L6-2
Рабочая зона
Макс. радиус действия 1911 мм
Цена: от 55000 €
Новый робот дуговой сварки, FD-V8, подходит для всех областей сварки. Нагрузка до 8 kg.
На 15% быстрее время цикла. Идеально подходит для максимальной производительности.
Промышленные роботы манипуляторы
Повысить производительность труда на предприятии можно не только за счет автоматизации процессов.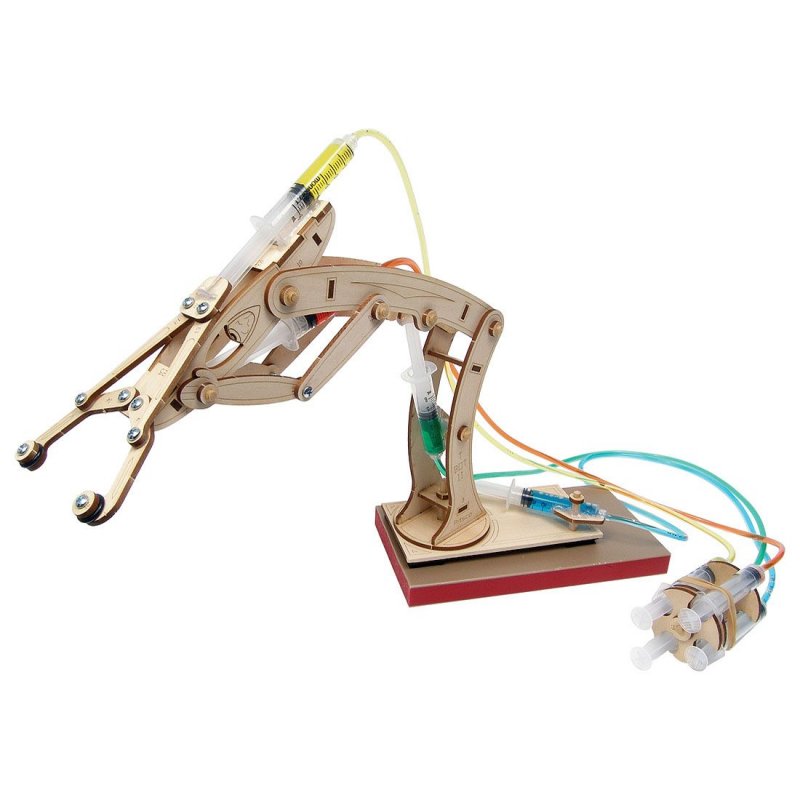 Существуют промышленные роботы манипуляторы для укладки на паллеты упаковок, разных по весу и размеру. Устройство представлено рукой с захватом на конце, которая управляется с помощью электромеханики.
Существуют промышленные роботы манипуляторы для укладки на паллеты упаковок, разных по весу и размеру. Устройство представлено рукой с захватом на конце, которая управляется с помощью электромеханики.
Купить промышленных роботов манипуляторов для паллетизации рекомендуется, если на вашем производстве:
- осуществляется серийный выпуск;
- повторяются технологические процессы, то есть они цикличны;
- вредные условия труда;
- повышенный риск получения производственной травмы;
- изготавливается крупногабаритная продукция;
- укладкой занимается более 2 человек.
На заметку: Роботы-манипуляторы оснащены захватами для разных грузов. Есть поддерживающие разновидности для мешков. Есть магнитные захваты для предметов с нестандартной формой, ребристой поверхностью. Есть всасывающие, предназначенные для гладких фактур.
Промышленные роботы манипуляторы в «Си Эл Инжиниринг и Ко»
Наша компания предлагает многофункциональные решения для паллетизации и депаллетизации (перемещения). Мы поставляем оборудование европейских производителей без посредников. Поэтому у нас можно купить механические устройства без дополнительных комиссий. Цена зависит от разных параметров:
Мы поставляем оборудование европейских производителей без посредников. Поэтому у нас можно купить механические устройства без дополнительных комиссий. Цена зависит от разных параметров:
- зоны досягаемости робота-манипулятора;
- грузоподъемности;
- класса точности;
- осей перемещения;
- скорости передвижения.
Мы гарантируем качество товаров и удобство эксплуатации. Наши мастера помогут настроить устройство, запрограммировать его на нужный алгоритм паллетирования, которого он будет придерживаться. При желании перепрограммировать механизм или при возникновении неисправностей покупатели всегда могут получить консультацию в сервисный центр.
В компании «Си Эл Инжиниринг и Ко» можно заказать и другие типы робототизированной техники: для сварки, для фрезерования и шлифования, для покраски.
Роботы-манипуляторы: преимущества
Паллетайзеры незаменимы не только на предприятиях. Они оптимизируют работу логистических, складских комплексов.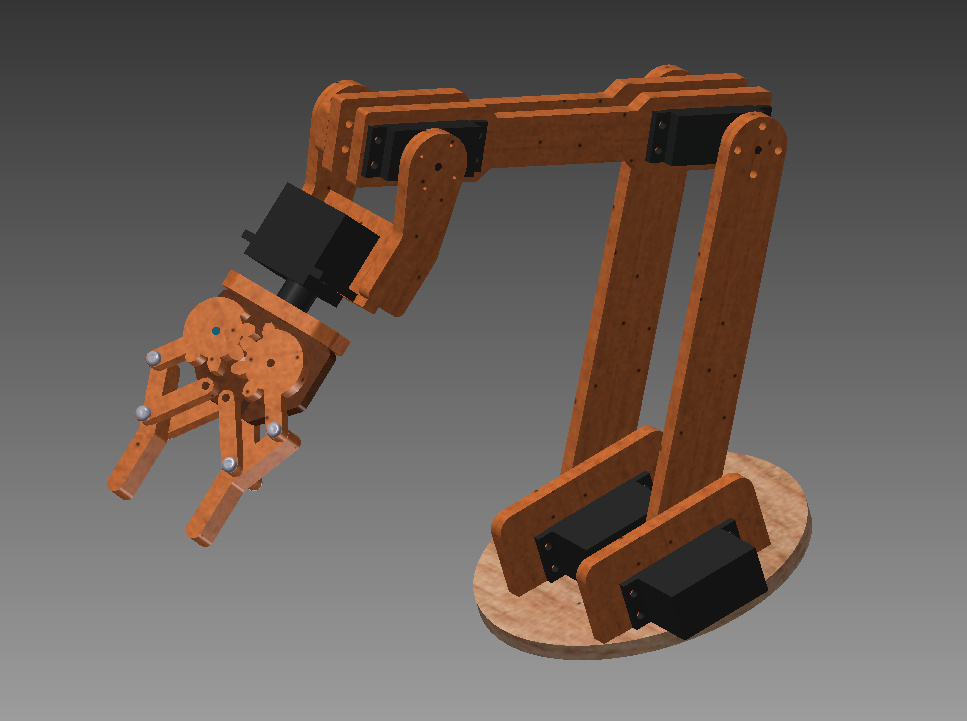 Среди достоинств промышленных роботов манипуляторов для паллетирования отмечают:
Среди достоинств промышленных роботов манипуляторов для паллетирования отмечают:
- Ускоряют в несколько раз процесс укладки. «Механизированная рука» совершает до 1500 циклов в час.
- Компактные устройства не занимают много места. Можно использовать минимальные площади для погрузки.
- Повышают пропускную способность станков, конвейерных линий, что благоприятно сказывается на мощности.
- Снижают процент брака за счет бережной погрузки с сохранением целостности упаковки и товаров.
- Справляются с перемещением габаритных и тяжелых товаров. Диапазон нагрузки составляет 40-1300 кг.
- Аккуратно укладывают разную тару: картонные коробки, мешки, стеклянные бутылки, лотки.
- Обеспечивает качественную укладку за счет правильных настроек. Промышленные работы манипуляторы не просто механически складывают груз. Умные, запрограммированные устройства «знают», как поправить перекос, что делать при падении.
- Освобождают сотрудников от тяжелой, монотонной работы, позволяя задействовать их в других операциях.
 В итоге не придется нанимать дополнительных рабочих, получится сократить издержки.
В итоге не придется нанимать дополнительных рабочих, получится сократить издержки. - Повышают производительность, так как могут работать без перерывов, выходных.
Использование промышленных роботов манипуляторов для укладки продукции сократит рабочий цикл.
Покупайте робототехнику с большим объемом памяти в нашем интернет-магазине. Для уточнения технических характеристик звоните менеджерам. Оформить заявку могут жители всей России. Доставка осуществляется ТК «Деловые линии».
Самый простой в сборке робот-манипулятор дома
Робототехника
Васант Видьякар
«AutoSaw от MIT избавляет от риска и мастерства при создании мебели на заказ, так что даже вы можете делать это, не теряя ненужного количества конечностей»
— как сказал Эван Акерман, IEEE Spectrum
AutoSaw — это роботизированное столярное устройство, представляющее собой роботизированную руку, которая может сделать изготовление мебели и аксессуаров на заказ более безопасным, простым и дешевым. Вы можете просто выбрать шаблон из программного обеспечения (стул, стол и т. д.) и настроить размер и форму, затем роботизированная рука самостоятельно выберет и распилит деревянные материалы до нужного размера.
Вы можете просто выбрать шаблон из программного обеспечения (стул, стол и т. д.) и настроить размер и форму, затем роботизированная рука самостоятельно выберет и распилит деревянные материалы до нужного размера.
С появлением таких продвинутых мехатронных устройств давно прошли те времена, когда многие отрасли промышленности нуждались в людях для выполнения точных, опасных и деликатных операций. Теперь, с последними достижениями в области робототехники, в индустрии мехатроники также появилось много разработок.
«Через несколько лет строители могут приходить на свои рабочие места, вводить номер в программу, а роботы будут резать и приносить им нужные детали»
— как сказал Липтон The Verge
Подробнее..
Примечание:
Вы уже ознакомились с нашими проектами по робототехнике?
Набор для робототехники будет отправлен вам, и вы сможете собрать его с помощью учебных пособий. Вы можете начать с бесплатной демоверсии уже сегодня!
1. Робототехника (курс построения карьеры)
Робототехника (курс построения карьеры)
2. Аниматронная рука
3. Робот-наблюдатель
4. 7 роботов (комбинированный курс)
5. Роботизированная рука
6. Двуногий шагающий робот
7. Робототехника с сенсорным управлением
8. Hexapod
9. Робототехника Swarm
10. Мобильная робототехника
11. Робот Sixth Sense Robot
12. 2 Проекты мехатроники на основе 1 Robotics
5
14. Голос Управляемый робот
15. Управляемый робот WiFi
16. Робот-решатель лабиринтов
17. Робототехника Bluetooth
18. Робот-пожарный
19. Обучение робототехнике и стажировка
С таким большим шумом в области мехатроники , многие студенты заинтересованы в создании собственного робота-манипулятора и хотят узнать больше о промышленной робототехнике.
Даже мы столкнулись с этой тенденцией, когда онлайн-курс по роботизированной руке, который мы запустили, имел большой успех, и многие студенты построили свои собственные роботизированные руки дома, используя онлайн-курс и комплект, который мы им отправили.
При общении с некоторыми студентами, записавшимися на наш курс по созданию роботов-манипуляторов, я обнаружил, что многие из них изначально пытались создать роботизированную руку полностью самостоятельно, но потерпели неудачу. Из-за использования сложных аппаратных частей, калибровки сервоприводов, логики программирования, интеграции датчиков и исполнительных модулей и т. д. создание робота-манипулятора намного сложнее, чем кажется.
Итак, в этой статье я предлагаю несколько советов и методологий, которые вы можете использовать для создания своего собственного робота-манипулятора
Что необходимо для создания вашего первого робота-манипулятора?
Поскольку манипулятор представляет собой сложную конструкцию, для успешного создания собственного манипулятора вам потребуются некоторые предварительные знания. Поскольку у него есть как механическая, так и электронная концепции, вам необходимо узнать о них, чтобы понять рабочий механизм роботизированной руки.
Некоторые из теоретических концепций, которые вам необходимо изучить, прежде чем приступить к сборке робота-манипулятора:
Последние проекты по робототехнике
Хотите получить практические навыки по робототехнике? Ознакомьтесь с нашими последними проектами и начните учиться бесплатно
Получите бесплатную демоверсию курса робототехники
- Схемы манипулятора робота: Основными частями манипулятора являются манипуляторы, концевые эффекторы и процессор. Манипуляторы действуют как корпус робота-манипулятора, концевой эффектор — это инструмент, который присутствует на конце робота-манипулятора и используется для выполнения некоторых конкретных задач, таких как покраска, сверление, захват и установка и т. д., и, наконец, процессор — это тот, который действовать как мозг системы. Сначала вам нужно решить, какой тип робота-манипулятора вы хотите построить, и разработать соответствующие схемы.
- Кинематика роботов: Кинематика — это изучение движения тел без учета его причины.
 А чтобы построить роботизированную руку, вам нужно узнать о кинематике робота, которая дает взаимосвязь между положениями, скоростями и ускорениями звеньев и суставов. Вам также необходимо изучить концепции прямой и обратной кинематики и их математическую формулировку, прежде чем проектировать свою роботизированную руку.
А чтобы построить роботизированную руку, вам нужно узнать о кинематике робота, которая дает взаимосвязь между положениями, скоростями и ускорениями звеньев и суставов. Вам также необходимо изучить концепции прямой и обратной кинематики и их математическую формулировку, прежде чем проектировать свою роботизированную руку. - Концепции серводвигателей: Поскольку серводвигатели имеют линейные угловые движения и могут использоваться для приведения в действие любого материала, прикрепленного к его руке, они предпочтительнее для создания проектов роботов-манипуляторов. Он также следует сервомеханизму с обратной связью, который использует обратную связь по положению для управления своим начальным движением и конечным положением. Прежде чем приступить к сборке робота-манипулятора, вам необходимо понять принципы работы серводвигателей. Возможность одновременного питания нескольких сервоприводов с высоким крутящим моментом является хорошо известной проблемой для всех тех, кто пытался работать с ними в прошлом.
 Им требуется много энергии и внешний источник (не используйте Arduino для их питания. Это приведет к повреждению Arduino).
Им требуется много энергии и внешний источник (не используйте Arduino для их питания. Это приведет к повреждению Arduino). - DH Параметры: Очень сложно создать однородную матрицу преобразования для сложной конфигурации. Поскольку параметр DH объединяет 6 переменных (3 поворота и 3 перемещения) в 4 параметра связи, это облегчает настройку систем координат XYZ. Поэтому вам необходимо узнать о параметрах DH до проектирования манипулятора.
Существует еще одна хорошо известная проблема , связанная с интерференцией между несколькими сервоприводами, когда сервоприводы вибрируют случайным образом, даже если на сервоприводы не подается сигнал. Эту проблему также необходимо преодолеть.
Знаете ли вы, что
Skyfi Labs помогает учащимся развивать навыки на практике с помощью
Онлайн-курсы по робототехнике
где вы учитесь, создавая реальные проекты.
Вы можете записаться вместе с друзьями и получить наборы прямо у порога.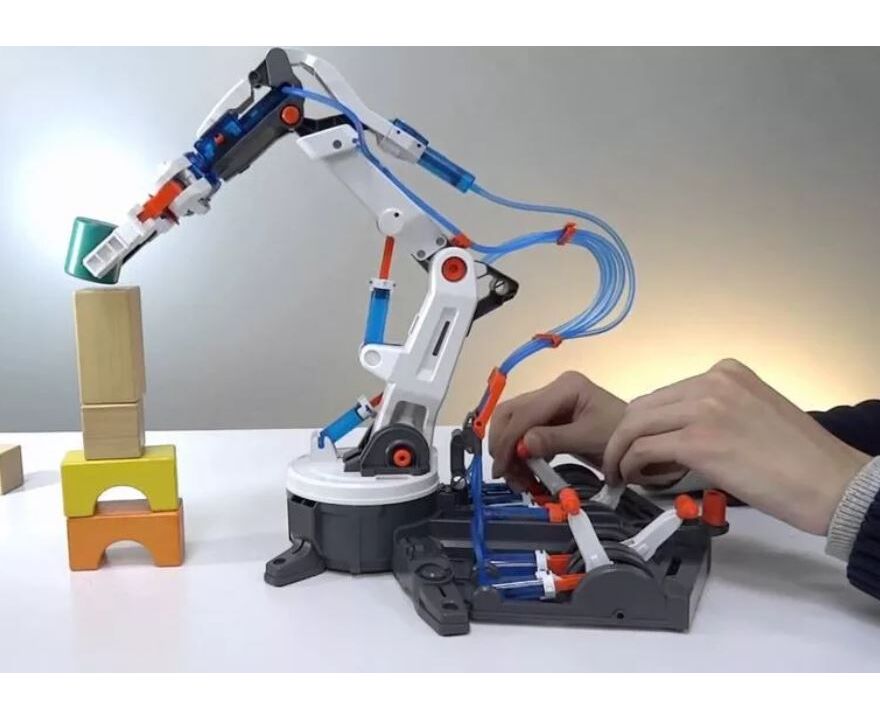
Вы можете учиться у экспертов, создавать рабочие проекты, демонстрировать миру свои навыки и
захватывать лучшие рабочие места.
Начните изучать робототехнику уже сегодня!
Щелкните здесь, чтобы узнать больше о концепциях, связанных с проектом роботизированной руки
Какая встраиваемая платформа подходит для создания манипулятора?
Процессор — наиболее неотъемлемая часть манипулятора, который действует как мозг системы и управляет срабатыванием. Хотя на рынке доступно множество процессоров, Arduino Uno станет идеальной встроенной платформой для начала работы.
Поскольку Arduino Uno является аппаратным обеспечением с открытым исходным кодом и использует простое программирование на C++, она послужит очень хорошей платформой для создания вашего первого робота-манипулятора. Прежде чем приступить к сборке робота-манипулятора, вам необходимо понять архитектуру Arduino и ее конфигурацию.
Кроме того, изучение программирования Arduino и некоторые базовые навыки программирования очень помогут вам в создании собственного робота-манипулятора. Вы можете выполнять простые упражнения по управлению серводвигателями с помощью Arduino, чтобы лучше понять сервопривод и интеграцию Arduino.
Вы можете выполнять простые упражнения по управлению серводвигателями с помощью Arduino, чтобы лучше понять сервопривод и интеграцию Arduino.
Какие существуют способы управления манипулятором?
Робот-манипулятор может приводиться в действие полуавтономно путем подачи некоторых команд. Эти команды могут быть даны роботу-манипулятору несколькими способами с использованием некоторых модулей. Наиболее часто используемые:
- Управление жестами: Вы можете построить роботизированную руку, которой можно управлять с помощью жестов. Вам понадобится датчик акселерометра ADXL, чтобы облегчить активацию, управляемую жестами. Этот датчик будет иметь несколько осей и выдавать микроконтроллеру различные значения в зависимости от его ориентации, а манипулятор робота будет запрограммирован на соответствующее срабатывание.
- Управление через Bluetooth: Вы также можете создать роботизированную руку, которая может получать команды через связь Bluetooth и действовать соответствующим образом.
 Вам понадобится модуль Bluetooth HC-05 для установки соединения между пользователем и системой. Вы сможете управлять срабатыванием робота-манипулятора, отправляя команды через приложение для Android через Bluetooth.
Вам понадобится модуль Bluetooth HC-05 для установки соединения между пользователем и системой. Вы сможете управлять срабатыванием робота-манипулятора, отправляя команды через приложение для Android через Bluetooth. - Дистанционное управление: Также можно построить роботизированную руку, которой можно управлять с помощью пульта дистанционного управления. Для этого вам понадобится радиочастотный модуль для установления связи между пультом дистанционного управления и манипулятором. Вы можете просто управлять срабатыванием манипулятора с помощью переключателей или джойстика на пульте дистанционного управления.
Требования к программному обеспечению?
Программирование манипулятора является неотъемлемой частью успешного завершения проекта. Есть несколько программ, которые вам необходимо использовать, чтобы ваш робот-манипулятор работал правильно. К ним относятся:
- Симулятор манипулятора робота: Поскольку для проектирования манипулятора используются прямая и инверсная кинематика и параметры DH, будет очень сложно воспринять и визуализировать преобразование в 3D.
 Использование симулятора облегчит эти трудности и поможет визуализировать действия манипулятора в 3D. RoboAnalyzer — одно из наиболее широко используемых программ для моделирования манипуляторов роботов, которое вы можете легко загрузить с Google.
Использование симулятора облегчит эти трудности и поможет визуализировать действия манипулятора в 3D. RoboAnalyzer — одно из наиболее широко используемых программ для моделирования манипуляторов роботов, которое вы можете легко загрузить с Google. - Arduino IDE: Вам необходимо программное обеспечение Arduino IDE для написания и загрузки логики программирования на плату Arduino. Вы можете легко загрузить это программное обеспечение прямо с их официального сайта.
- Приложение сервоконтроллера: Если вы используете модуль Bluetooth для управления приведением в действие манипулятора робота, вам потребуется приложение для управления серводвигателями. Существуют бесплатные приложения по умолчанию, которые можно загрузить из магазина приложений и подключить к модулю Bluetooth, интегрированному с роботизированной рукой.
Как получить необходимые комплекты для сборки робота-манипулятора в домашних условиях?
Получить нужные компоненты для сборки вашего робота-манипулятора непросто, так как требуется много компонентов. Кроме того, некоторые компоненты недоступны и должны быть изготовлены на заказ. Вам понадобятся следующие компоненты, чтобы построить собственную роботизированную руку:
Кроме того, некоторые компоненты недоступны и должны быть изготовлены на заказ. Вам понадобятся следующие компоненты, чтобы построить собственную роботизированную руку:
- Роботизированный манипулятор руки
- Концевой эффектор роботизированной руки
- Ардуино Уно
- HC-05 Модуль Bluetooth или ADXL Gesture или радиочастотный модуль
- Макет и соединительные провода
- Аккумуляторы и внешний механизм питания для обеспечения достаточного питания сервоприводов
Из приведенного выше списка вы можете легко получить такие компоненты, как Arduino Uno, сенсорные модули и провода. Вы можете заказать эти компоненты онлайн или купить на местном рынке.
Но механические компоненты (манипулятор и концевой эффектор) не очень легко достать, так как это не стандартный компонент, а его размер и форма варьируются в зависимости от проекта. Вы можете либо спроектировать компоненты и изготовить их, либо использовать 3D-принтер для печати всех компонентов.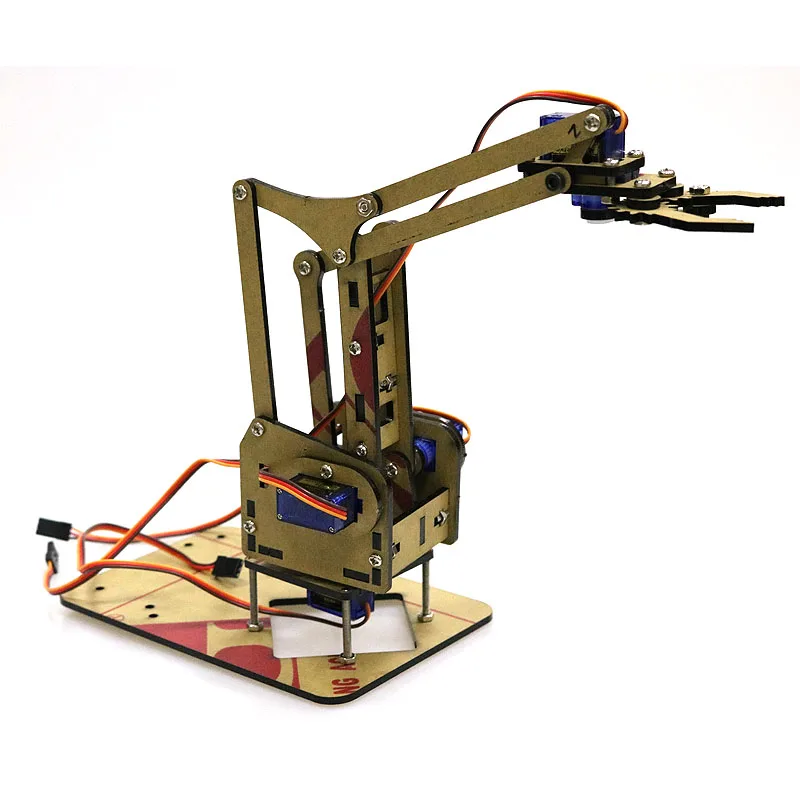
Многие энтузиасты пытаются придумать свои собственные конструкции для разработки манипуляторов и концевых эффекторов, но это были концепции механического проектирования. Они понимают, насколько это сложно, и ценят механическое проектирование после того, как попытались и потерпели неудачу!
Надеюсь, у вас есть несколько хороших советов, которые помогут вам собрать роботизированную руку.
Помните, что вы должны не только построить манипулятор, но и учиться в процессе его сборки. Поскольку в нем задействовано много сложных концепций, обучение при создании собственного проекта робота-манипулятора поможет вам познакомиться с промышленной робототехникой.
Если вы хотите создать свою собственную руку-робот, но не знаете, с чего начать, мы в Skyfi Labs разработали инновационную методологию обучения, с помощью которой вы можете научиться создавать руку-робот прямо у себя дома. Благодаря доставленным вам полным комплектам оборудования и предоставленной технической помощи 1-1 научиться создавать собственную роботизированную руку никогда не будет сложно.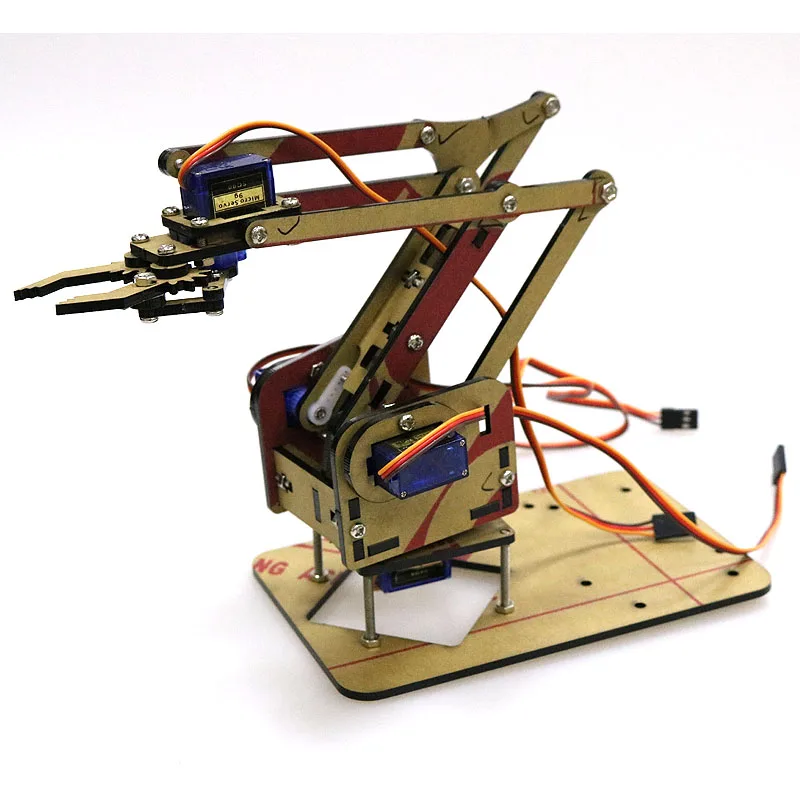
Научитесь собирать свою собственную руку-робот
Расскажите нам, что вы считаете лучшим проектом руки-робота своими руками, оставив комментарий ниже.
Оставьте свои комментарии ниже.
Лаборатории Скайфи
•
Опубликовано:
2018-03-26 •
Последнее обновление:
2021-03-07
Комплект механической руки для акрилового робота-манипулятора
Нажмите, чтобы увеличить
₹257,63 (без учета налогов)
- Комплект механической руки для акрилового робота-манипулятора
- Материал: Акрил
- Совместимый сервопривод: SG90
- Простота сборки
Ссылка клиента:
DIY акриловый робот-манипулятор механическая рука комплект количество
Для массовых запросов, пожалуйста, напишите нам на [email protected]
Сравнить
Добавить в список желаний
Артикул: ST2101RO0209
Категории: Комплект шасси, Робототехника
Теги: шасси, комплект шасси, шасси электроники, металлическое шасси, робот, шасси робота, комплекты роботов, шасси робота, Transparent, Transparent Robot Smart Car Chassis Kit, шасси автомобиля
- Описание продукта
- ИНФОРМАЦИЯ О ПРОДУКТЕ
- информация о доставке
- Перевозка и доставка
Описание продукта
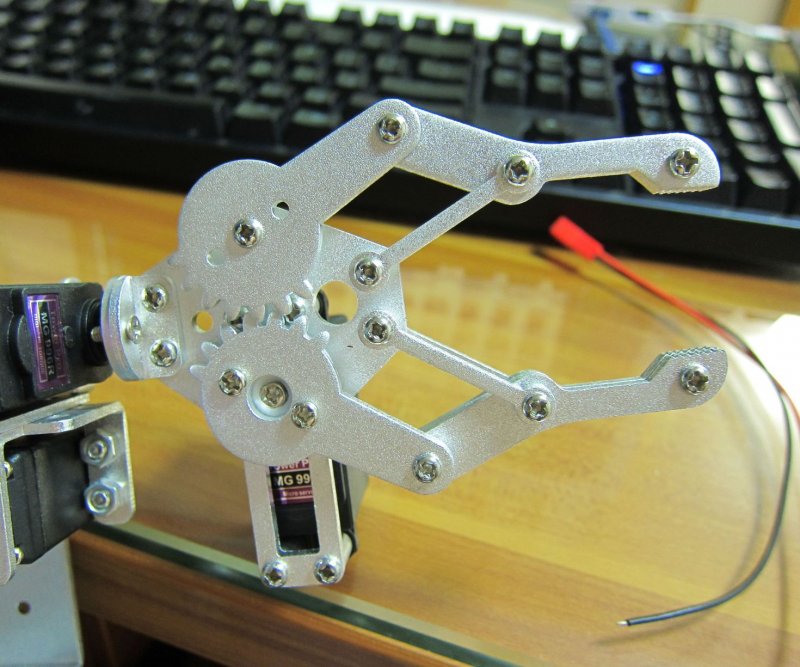
Комплект механической руки-манипулятора для самостоятельного изготовления из акрила
Это рука-манипулятор для самостоятельного изготовления, изготовленная из высококачественного акрила.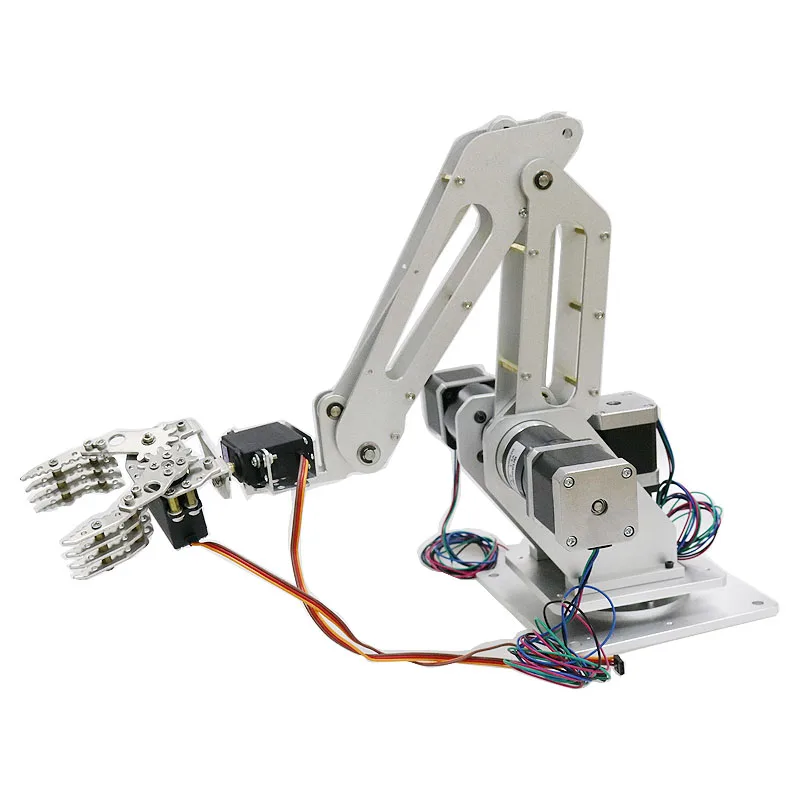 Совместимый с микросервоприводом SG90, коготь обеспечивает надежное сцепление с любой поверхностью.
Совместимый с микросервоприводом SG90, коготь обеспечивает надежное сцепление с любой поверхностью.
Примечание. В комплект не входит серводвигатель SG90, его необходимо приобретать отдельно.
Особенности:
- Высококачественный акрил
- Совместим с сервоприводом SG90
Характеристики/характеристики:
- Материал: Акрил
- Совместимый сервопривод: SG90
- Длина: 75 мм
- Ширина: 110 мм
- Вес: 65 г
В коплект входит :
- 1 x DIY Акриловый робот-манипулятор Механический комплект
- 1 x Набор винтов
Примечание. Изображения продукта показаны только в иллюстративных целях и могут отличаться от фактического продукта.
ИНФОРМАЦИЯ О ПРОДУКТЕ
Сведения о доставке
Доставка
Мы делаем все возможное, чтобы добраться до каждого уголка Индии, используя несколько лучших курьерских служб, работающих в стране, таких как Delhivery, DTDC, BlueDart, XpressBees, Ecom Экспресс и т.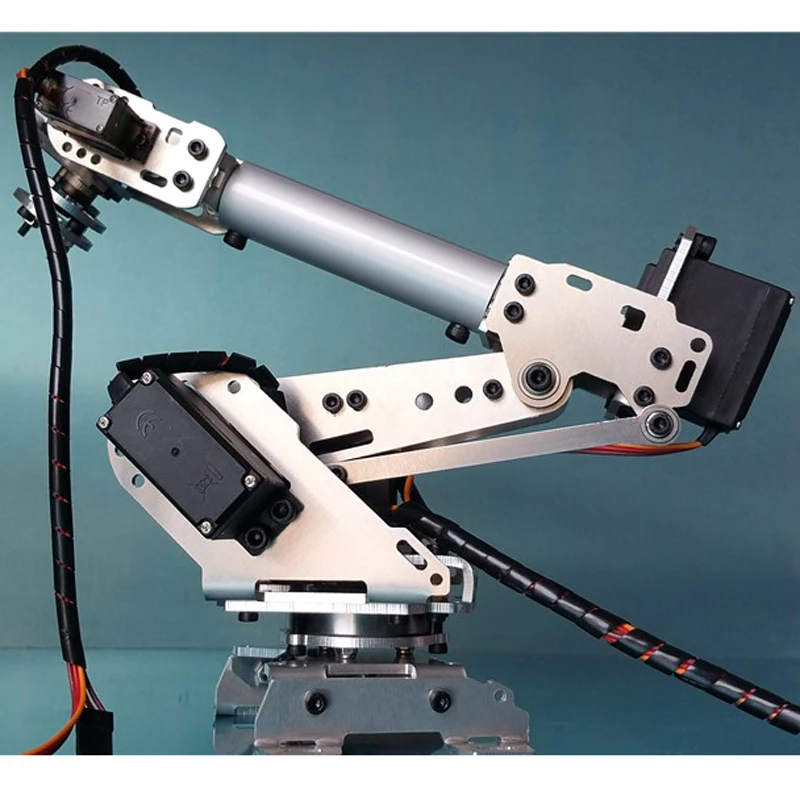
Всего комментариев: 0