Как собрать экзоскелет: Экзоскелет своими руками (видео) » 24Gadget.Ru :: Гаджеты и технологии
Содержание
Крутая самоделка — силовой экзоскелет своими руками
Крутая самоделка — силовой экзоскелет своими руками
Это пневматический экзоскелет с очень прочным стальным каркасом. Для этого скелета нам понадобится сварка (совсем немного), дрель и отрезная. Обшивка была нарезана на чпу фрезе. Ну, и немного стали.
Начнем мы с каркаса рук.
Весь каркас мы делаем из стального профиля. Он хорошо обрабатывается и благодаря многочисленным отверстиям очень удобен для соединения. Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6 мм.
Или же сбоку. Внизу будет установлена дуга из ПЭТа.
Все элементы подгоняются под конкретную руку поэтому о каких- то точных размерах сказать сложно. В моем случае основа этого элемента делалась из цельного куска в 1 метр и перегибалась под 90 градусов через 45-10-45 см.
Второй элемент идет от локтя до плеча. Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Вот так выглядит это всё сверху.
Или сбоку. Если есть небольшие «перепилы» как у меня это не страшно. На сталь в слабых местах всегда можно наварить нужные элементы. Для этого участка понадобится примерно 1,5 метра стального профиля.
Вот так рука крепится к шаровой опоре, которая служит тут плечевым суставом. Довольно мощный и подвижный элемент. Крепится эта опора на 2 насквозь проходящие через весь каркас шпильки на 10 мм.
Сделаем 5-6 штук 20 см пневмомускул. Со стороны джойстика устанавливаем стальную пластину. Примерно на расстоянии 3 см от конца петли.
На эту пластину и на другой конец каркаса и крепим мускулы. Если отверстий будет не хватить — сверлим. Всё равно всё это будет ещё покрываться пластиком.
Сверху это выглядит вот так. Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
Также, при подборе элементов и нужного градуса изгиба, нужно учитываться что мускулы сокращаются примерно на 1/3.
Так же делается и вторая рука. Вместо двух штырей на конец можно приделать всё что угодно. Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
Следующий элемент это грудная основа с пнематикой. Это наиболее сложный и тяжелый элемент т.к. очень много элементов.
Сначала покажу как это должно выглядеть в конце.
Можно увидеть огромное количество зеленых трубок пневмопровода, мускулы, клапана, аккумуляторы.
Основу каркаса спины мы также делаем из стального профиля. Состоит он из 2 пропиленных и изогнутых элементов по 1 метру и одного «П» образного элемента 60-30-60. Всё это прошивается шпильками нужной длины. Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Сбоку это выглядит вот так. Все зажимается и соединяется болтами — никакой сварки. Так потом проще что-то снимать и подгонять, а это точно нужно будет делать не раз.
Бедра состоят из 4 элементов профиля длиной 20 см, 2 элементов из профиля длиной 10 см и 2 мощные шпильки на 12 мм, которые и соединяют все это. К спине бедра крепятся через очень мощную петлю.
Ноги также крепятся через шаровую опору. Она устанавливается через 5 см кусок профиля. Это элемент зажимается 20 см кусками профиля через шпильку. Должно быть что-то типа вот такого. Это прочно и подвижно получается.
А теперь самое сложное — пневматика.
Будем использовать стандартную полную схему. Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Есть более простой, но менее эффективный вариант.
Приводы те же, но вся пневматика будет раз в 10 меньше…и во столько же раз неэффективней.
Но мы делаем первый вариант.
Сначала соединяем распределитель, ресивер, компрессор и пневмореле в 1 модуль. Так будет значительно удобней.
Ресивер сделан из обычного огнетушителя на 3 литра. Компрессор — двухцилиндровый для накачки шин. Клапана от полуавтоматической сварки для СО. Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Питание выводим через пневмореле на какой-нибудь мощный переключатель (На 25А) и на аккумуляторы.
На передней части ставим 3 стальные пластины по 30 см. На них мы будем крепить компрессорный модуль и клапана. Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.
Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.
Крепим на пластину клапана. Учитываем что на каждую группу мышц нужно 2 клапана — для активации и для спуска.
Все выходные трубки каждого активационного клапана подключаем к распределителю. Распределитель это по сути пневматический тройник. В него идет относительно толстый шланг от ресивера, а с него выходит много тонких трубок. Можно обойтись и без него, но понадобится просто огромное количество тройников от омывателя.
Кроме локтевого привода есть ещё привод на плече. Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Второй уголок крепится уже на руку. Важно так подобрать длину мышц и расположение уголка чтобы при полностью расслабленных мышцах рука свободно висела. Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
Осталось сделать ноги с обшивкой и экзоскелет готов!
Самая сложная часть ноги это коленный сустав. Вот так он выглядит. Их нужно сделать 4 шт. Соединяется он с помощью сварки.
Фотография несколько смазана, но принцип увидеть можно. Это просто подшипник в зажиме и ограничитель хода. К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
Если не делать ограничение хода то появляется вероятность повреждения ноги пилота.
Каркас ноги состоит из 4 подковообразных элементов. Все их размеры также подгоняются под конкретного человека. Все 4 элемента имею разные размеры. Скрепляется всё шпильками 10-12 мм, причем выводим 2 шпильки на длину бедра. Через них нога и будет крепится к шаровой опоре бедра.
Через них нога и будет крепится к шаровой опоре бедра.
Вариантов как сделать ступни было 2. Первый состоял в использовании уже готового элемента.
Это был более простой и быстрый способ. Для такой ступни нужно было только 4 элемента: Один стальной держатель для бруса, стальная пластина под ступню и 2 уголка для крепление к ноге. Крепится все должно было с помощью обычных портфельных шлейфов и замков.
Второй вариант заключался в изготовлении из пластин более аэргономичной конструкции. На этом варианте мы и остановились.
В этой ступне все элементы это просто 4 мм сталь, изогнутая и подогнанная под ногу. Элементы провариваются.
Ноги также имеют приводы. По 2 на ногу. Они позволяют удерживать статичное состояние или же подняться. Одна группа мышц расположена в бедре и тянется от каркаса бедра к верхней подкове ног. Мышцы как бы тянет вперед ногу.
Вторая группа мышц расположена прямо в каркасе ноги. Эта группа при активации «стягивает» ногу. Шланги идут к спине, к клапанной группе.
Шланги идут к спине, к клапанной группе.
Управление ногами осуществляется через кнопки расположенные в «лодыжке». Т.е. мы тянем ногу назад и нажимаем кнопку.
Как и в случае с рукой ведем провода к клапанам. Руки используют только 2 из 5 контактов джойстиков поэтому можно приделать какое-то оборудование. Или же перевести управление ног на руки.
Для зашиты всей пневматики от повреждений и защиты пилота от пневматики весь экзоскелет покрывался противоударным ПЭТом.
ПЭТ это что-то типа толстого спрессованного полиэтилена. Является антивандальным покрытием. Покрываем пластиком места непосредственного расположения пневматики и участки контакта с пилотом. Крепим саморезами и болтами.
В обшивку ног устанавливаем кнопки для управления. Тут их лучше видно. Верхние кнопки управляют бедренными приводами. Провода и трубки лучше поместить в какую нибудь гофру или же другой шланг — их так много что велика вероятность случайно задеть.
Для того чтобы экзоскелет можно было легко одевать и снимать в качестве держателей пилота используем портфельные лямки.
Скелет готов! Само собой это не 146% точное руководство по сборке т.к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
Собирали мы вот это
Источник: pikabu.ru/@LPlague
Студент ИТМО разработал активный экзоскелет, в котором можно без труда поднять до 80 килограммов
Студент факультета систем управления и робототехники Университета ИТМО Алексей Ледюков создал экзоскелет, который в перспективе сможет поднимать до 80 килограммов. При этом сам костюм получился довольно легким: в нем можно активно двигаться и даже бегать. В интервью ITMO.NEWS Алексей рассказал, как, еще будучи школьником, сделать свой первый экзокостюм в гараже из проволоки и чем разработка может быть полезна МЧС и страйкбольным фанатам.
— Расскажи, пожалуйста, как вообще появилась идея создать экзоскелет.
— Еще с восьмого класса я увлекался робототехникой — сам сделал радиоуправляемый танк. А потом захотел сконструировать что-то более сложное и решил попробовать сделать экзоскелет. Начал смотреть ролики на YouTube, сделал макет из бумаги. Мне помогал дедушка — с ним мы в гараже сварили первый каркас из проволоки. Вручную делали каждую деталь, замеряли, ставили метки маркером, потом приваривали. И так, постепенно, собирался первый «Франкенштейн». У того костюма везде были сварочные швы, так что смотрелся он жутковато. К тому же экзоскелету не хватало жесткости, так как он был сделан из вязальной проволоки. Когда я его разобрал, то увидел, что спина из-за нагрузок выгнулась.
А потом захотел сконструировать что-то более сложное и решил попробовать сделать экзоскелет. Начал смотреть ролики на YouTube, сделал макет из бумаги. Мне помогал дедушка — с ним мы в гараже сварили первый каркас из проволоки. Вручную делали каждую деталь, замеряли, ставили метки маркером, потом приваривали. И так, постепенно, собирался первый «Франкенштейн». У того костюма везде были сварочные швы, так что смотрелся он жутковато. К тому же экзоскелету не хватало жесткости, так как он был сделан из вязальной проволоки. Когда я его разобрал, то увидел, что спина из-за нагрузок выгнулась.
Я учел эти ошибки при разработке второго костюма — усилил каркас, добавил новые точки подвижности. Всего с дедушкой мы сделали два варианта, я конструировал как пассивные, так и активные экзоскелеты. Сейчас я разрабатываю уже пятый активный костюм.
— А что представляют собой активные и пассивные экзоскелеты? Чем они отличаются?
— Активный экзоскелет совершает какую-то работу, он оснащен дополнительным источником энергии, за счет которого костюм и помогает человеку. Такие костюмы есть, например, в армии и на промышленном производстве. А пассивный костюм разгружает и лишь частично переносит вес, который берет на себя человек.
Такие костюмы есть, например, в армии и на промышленном производстве. А пассивный костюм разгружает и лишь частично переносит вес, который берет на себя человек.
У существующих активных экзокостюмов есть проблема — они очень малоподвижны. Человек не может, например, бегать в промышленном костюме, он даже ходит в нем с трудом, поскольку конструкция очень массивная.
— Какой первый груз ты поднял, когда сконструировал свой экзоскелет? Какие были ощущения?
— Это был свинцовый аккумулятор для машины, он весил около 15–20 килограммов. Тяжесть, конечно, немного ощущалась, но основную нагрузку костюм брал на себя. Вообще, в экзоскелете чувствуешь себя примерно так же, как когда ты ведешь машину. Например, если какая-то гайка не закручена, ты тут же это ощутишь.
— В ИТМО ты поступал с этим проектом? Или только потом рассказал, что у тебя есть свой экзоскелет в шкафу?
— Еще учась в школе, я участвовал в Балтийском научно-инженерном конкурсе, Geek Picnic, учился в Академии цифровых технологий. Когда пришло время поступления в вуз, я выбирал между ИТМО и Политехом. В ИТМО проект заметили и пригласили меня, в итоге это и определило мой выбор.
Когда пришло время поступления в вуз, я выбирал между ИТМО и Политехом. В ИТМО проект заметили и пригласили меня, в итоге это и определило мой выбор.
— Каким был костюм тогда и что он представляет собой сейчас?
— У второго варианта экзокостюма было два главных недостатка — большой вес и малая подвижность в тазовой части. Поэтому я начал проектировать новый вариант, освоил 3D-моделирование.
У следующего прототипа уже можно было менять размер, подгонять его под определенного человека, были добавлены дополнительные оси вращения в спине, тазовой части, плечах. Костюм уже не сковывал человека, но по-прежнему был тяжелым из-за использования стального каркаса.
Третий вариант весил под 100 килограммов. А тот, что я разрабатываю сейчас, в собранном состоянии будет весить 40―45 килограммов. За счет уменьшения габаритов и использования композитов мне удалось снизить вес почти наполовину.
— Из чего сейчас состоит конструкция?
— Корпус сделан из углепластика, пневмопоршни — из стали и алюминия, подшипники — из закаленной стали. Держатели и закрывающие элементы выполнены из латуни, АБС-пластика и стеклопластика.
Держатели и закрывающие элементы выполнены из латуни, АБС-пластика и стеклопластика.
— Какие планы по дальнейшей модификации?
— Новая версия будет более эргономичной и технологичной. Раньше все формы печатались на 3D-принтере, затем сверху вручную наматывался углепластик и все это обрабатывалось бурмашиной. Новую модель мы планируем сделать с помощью литья. Создадим силиконовую форму, а в нее зальем двухкомпонентный пластик, армированный углеволокном.
— Расскажи подробнее, как работает костюм. Что ощущаешь, поднимая, например, 20-литровую канистру с водой?
— Когда человек поднимает руку или ногу, то срабатывают резистивные датчики давления, расположенные в определенных местах. Именно по ним вычисляется скорость и направление движения привода. Костюм не оказывает никакого сопротивления, он двигает приводы в ту же сторону, откуда идет сигнал от датчиков. Сигнал обрабатывается и открывает-закрывает клапаны, идущие к приводам экзокостюма. Затем, когда человек берет груз, изменяется вектор движения. Соответственно, костюм это «понимает» и старается компенсировать прикладываемое усилие. Когда в руке груз, то человек будет ощущать его, но при этом мышцы не будут напрягаться.
Затем, когда человек берет груз, изменяется вектор движения. Соответственно, костюм это «понимает» и старается компенсировать прикладываемое усилие. Когда в руке груз, то человек будет ощущать его, но при этом мышцы не будут напрягаться.
— Кто сможет носить костюм?
— Новая модель подойдет людям с ростом от 170 до 190 см.
— А где еще можно использовать разработку, помимо промышленности и армии?
— Еще одна сфера использования — МЧС. Этот костюм довольно подвижный, для заводских нужд такие характеристики не нужны, на производстве достаточно просто уметь поднимать грузы и быть достаточно мобильными.
А вот для сотрудников МЧС костюм будет хорошим подспорьем. Например, та же тяжелая техника не может проехать в разрушенное здание, пока спасатели не разберут завалы. Кроме того, костюм сам по себе будет служить защитой от падающих обломков или, допустим, высокой температуры, если сделать его огнеупорным.
В МЧС знают о нашей разработке — они предлагали протестировать экзоскелет на испытательном полигоне.
— Сколько человек сейчас входит в команду разработчиков? Кто и чем занимается?
Наша команда состоит из шести человек: каждый выполняет свою роль. Есть исполнители, генераторы идей и люди, которые эти идеи описывают и публикуют.
В перспективе мы планируем подать заявки на несколько грантов. Также в этом году хотим поучаствовать с проектом в Акселераторе ИТМО, а к лету выйти на мелкосерийное производство пассивных походных костюмов. Кроме того, у нас есть заказ разработать экзокостюм для страйкбола.
— А зачем в страйкболе такие разработки?
— Я сам удивился, когда ко мне обратились организации, занимающиеся поставкой снаряжения для страйкбола. Костюм может выполнять роль «танка», который не боится пуль. Это своего рода имитация прорыва периметра.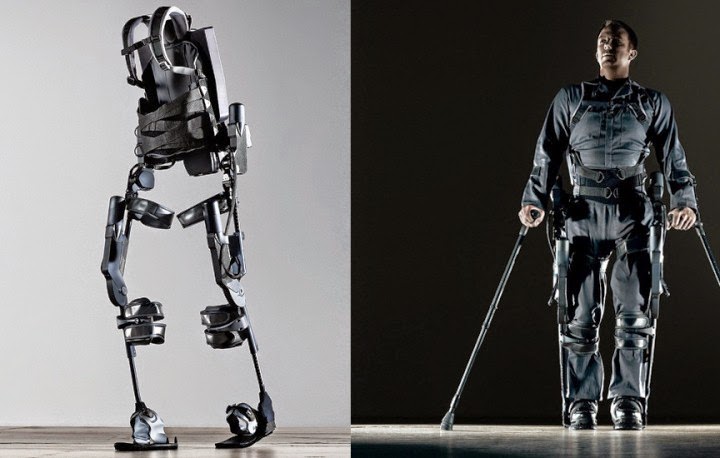 Использование экзокостюма по сути позволит изменить саму концепции игры, которая строится на одном попадании.
Использование экзокостюма по сути позволит изменить саму концепции игры, которая строится на одном попадании.
— Рассматривал ли ты вариант сконструировать экзоскелет для людей с ограниченными возможностями?
— У меня нет таких планов. Существующие медицинские костюмы довольно хороши, их основная проблема — дороговизна. Поэтому разработчикам просто нужно найти способ удешевить их.
К началу
Экзоскелет своими руками | Хакадей
20 января 2022 г. Мэтью Карлсон
Хотя это и не совсем пещера, идея создания собственного экзоскелета с ограниченным набором инструментов действительно напоминает Тони Старка. [Эндрю Пиччинно] — инженер-механик, мечтающий о 3D-печати экзоскелета всего тела под названием 3X0. Это проект, над которым он размышлял еще со времен колледжа, но всерьез работа над ним началась около пяти месяцев назад. К сожалению, здесь слишком много фотографий, но посмотрите его Instagram или makeprojects, чтобы найти больше фотографий.
К сожалению, здесь слишком много фотографий, но посмотрите его Instagram или makeprojects, чтобы найти больше фотографий.
Чтобы убедиться, что детали подходят, [Эндрю] начал с создания сетки своего тела. После того, как он прогнал пятьдесят своих относительно неподвижных фотографий через какое-то программное обеспечение для фотограмметрии, у него была приличная сетка. Хотя измерения не были точными до миллиметра, относительные размеры всего были достаточно точными. Хотя дизайн моделируется с учетом его размеров, все различные части являются параметрическими, что теоретически позволяет кому-то настраивать дизайн под свое тело.
На данный момент все детали полностью напечатаны на 3D-принтере, за исключением стальных шарикоподшипников, газовых поршней и натяжных лент. Детали, не напечатанные на 3D-принтере, выбраны так, чтобы их было легко достать, поскольку газовый поршень всего лишь 100 Н, как мебельный поршень. Процесс проектирования включает в себя довольно много математики, изучения движения и моделирования, чтобы убедиться, что деталь, которую он печатает, не только подходит, но и движется правильно. Многие детали, такие как плечо, построены вокруг большого специального подшипника, который позволяет детали правильно двигаться вместе с суставами пользователя.
Многие детали, такие как плечо, построены вокруг большого специального подшипника, который позволяет детали правильно двигаться вместе с суставами пользователя.
Находясь в середине разработки, [Эндрю] добился серьезного прогресса, и мы с нетерпением ждем его завершения. Текущая конструкция в основном пассивная, всего с несколькими пружинами и поршнями, но он уже с нетерпением ждет возможности сделать ее активной до такой степени, чтобы она могла увеличивать движения пользователя, а не просто снимать нагрузку. Понятно, что [Эндрю] считает, что экзоскелеты — это взгляд в потенциальное будущее, и мы не можем с этим не согласиться. В том же ключе, возможно, методы, используемые в этом экзоскелете с приводом от бюджета, могут быть использованы для питания 3X0?
Рубрика: Машиностроение, ЛайфхакиTagged 3д печать, 3х0, Экзоскелет своими руками
25 января 2016 г., Джеймс Хобсон
Как некоторые из вас могут знать или не знать, меня интересует все, что связано с экзоскелетом. Я возился со своими собственными дизайнами в течение прошлого года или около того, и только в прошлые выходные протестировал новейший дизайн нижней части тела. Есть много скучных (и некоторые сказали бы безопасных) способов проверить это. Но это не весело. Для своего теста я использовал нижнюю часть экзоскелета, чтобы поднять Mini Cooper.
Я возился со своими собственными дизайнами в течение прошлого года или около того, и только в прошлые выходные протестировал новейший дизайн нижней части тела. Есть много скучных (и некоторые сказали бы безопасных) способов проверить это. Но это не весело. Для своего теста я использовал нижнюю часть экзоскелета, чтобы поднять Mini Cooper.
Возможно, вы помните мой первоначальный дизайн верхней части кузова, который я собрал в своем гараже в качестве доказательства концепции. Это сработало хорошо и, что удивительно, покорило Интернет, набрав более миллиона просмотров за одну неделю видео о том, как я скручиваю 170 фунтов на заднем дворе. Начался пожар — я знал, что должен сделать что-то лучше. И это было началом моих поисков по созданию экзоскелета с питанием от всего тела.
Самая большая проблема с оригиналом заключалась в отсутствии поддержки спины — неважно, какой вес я мог поднять, вес все равно принимал на себя мой слабый человеческий скелет. Итак, пришло время вернуться к чертежной доске и начать проектирование с нуля. Читать далее «Самодельный экзоскелет легко поднимает Mini Cooper» →
Читать далее «Самодельный экзоскелет легко поднимает Mini Cooper» →
Posted in Разные хаки, SliderTagged экзоскелет своими руками, экзоскелет, экзоскелет поднимает автомобиль, Hacksmith, пневматический экзоскелет, костюм
Экзоскелет | ЭдуЭкзо 2.0 | Auxivo
Обучение будущих пионеров экзоскелета
EduExo 2.0
EduExo 2.0
В коробке вы найдете микроконтроллер, датчики, пластиковые детали, текстильные манжеты, двигатель и множество мелких деталей, таких как кабели, заглушки и винты. Чтобы собрать его, вам понадобится несколько инструментов, таких как отвертки, паяльник и компьютер для его программирования.
Содержание справочника
Справочник EduExo 2.0 состоит из семи основных глав, знакомящих вас с самой современной технологией экзоскелета. Во всех главах есть теоретическая часть, которая дает вам более глубокие знания об экзоскелетах. Кроме того, в большинстве глав есть раздел с учебными пособиями, который проведет вас через следующие этапы сборки и программирования для создания вашего экзоскелета с оборудованием, поставляемым в коробке.
Кроме того, в большинстве глав есть раздел с учебными пособиями, который проведет вас через следующие этапы сборки и программирования для создания вашего экзоскелета с оборудованием, поставляемым в коробке.
Глава 1: Введение
Первая глава знакомит с областью роботизированных экзоскелетов — исследуя историю экзоскелетов, примеры существующих систем, их функциональность и их применение.
Глава 2: Анатомия и механика:
Третья глава посвящена основам функциональной анатомии человека и механике экзоскелета. Здесь он получает практическое руководство по сборке EduExo Pro.
Глава 3: Электроника
В этой главе рассказывается об основных знаниях и навыках в области электроники, необходимых для безопасного подключения всех электронных частей EduExo Pro.
Глава 4: Программное обеспечение
В этой главе рассматривается программное обеспечение, которое превращает механический экзоскелет в роботизированный экзоскелет. Он содержит примеры исходного кода для всех основных функций экзоскелета.
Он содержит примеры исходного кода для всех основных функций экзоскелета.
Глава 5: Основные системы управления
Глава седьмая знакомит с системами управления. Вводятся, обсуждаются, реализуются и тестируются различные контроллеры, определяющие взаимодействие экзоскелета с пользователем.
Глава 6: Расширенные системы управления
Наиболее важной задачей системы управления является обеспечение поддержки в случае необходимости. Для этого ценной информацией является намерение пользователя двигаться и его физическая нагрузка. Их можно оценить, используя мышечную активность.
Глава 7: Виртуальная реальность и видеоигры
Виртуальные реальности и видеоигры можно использовать с экзоскелетами. Они, например, используются для повышения мотивации у пациентов, использующих экзоскелеты для реабилитации, например, после инсульта. В этой главе мы создадим собственную видеоигру и используем EduExo в качестве игрового контроллера и устройства обратной связи.
Всего комментариев: 0