Манипуляционный робот это: промышленное аппаратное обеспечение, какие виды, типы и основные элементы
Содержание
Промышленный робот — разновидности и их внедрение на производство
Промышленный робот — разновидности и их внедрение на производство
Статьи
Оценить мой проект
Заказать сервис
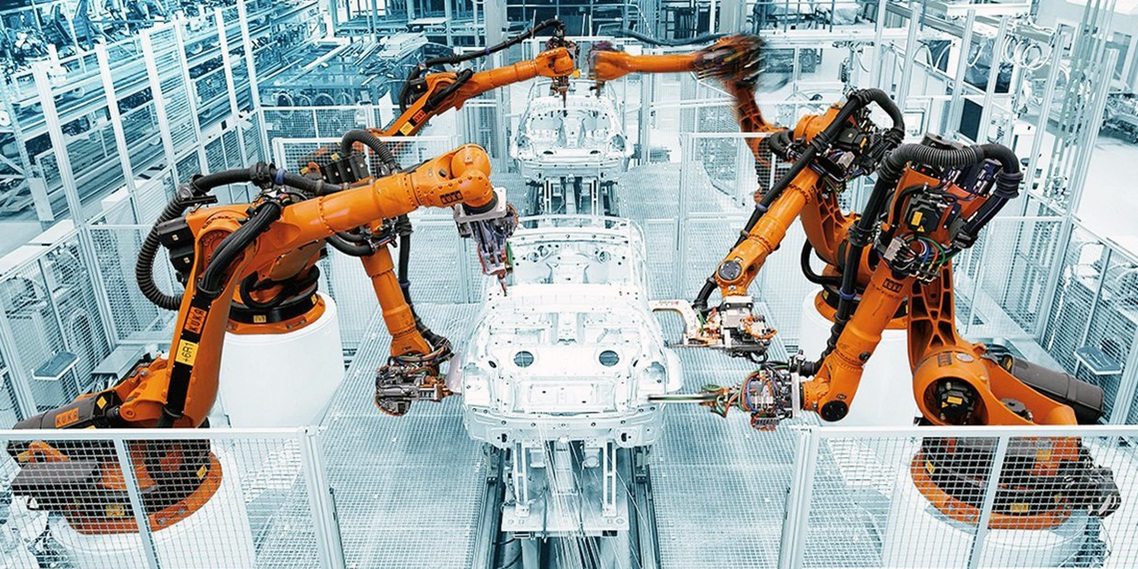
Один из наиболее востребованных вариантов промышленного оборудования — робот-манипулятор. Эти машины управляются дистанционно и являются неотъемлемым элементом многих технологических процессов, особенно тех, что опасны для человека или вредны для здоровья. Наиболее эффективны промышленные роботы-манипуляторы в составе автоматизированных производственных систем. Их использование позволяет повысить уровень качества и увеличить производительность выполняемых работ. Отличный выбор такого оборудования предлагает компания «ДС-Роботикс» в нашем каталоге.
Особенности и разновидности манипуляторов
Промышленные роботы-манипуляторы этого типа относятся к профессиональному оборудованию. Их конструкция позволяет имитировать движение руки человека. Отличительной чертой подобных устройств является их способность выполнять задачи, которые являются физически невозможными для человека.
Отличительной чертой подобных устройств является их способность выполнять задачи, которые являются физически невозможными для человека.
Разработаны такие приспособления специально для модернизации производств и повышения экономической отдачи от них. Ещё одна причина роста их популярности — снижение или даже полное исключение производственных травм. При этом непосредственное присутствие человека при выполнении операций не требуется. Работники предприятия могут удалённо управлять роботом.
Главное различие между такими устройствами заключается в дополнительном навесном оборудовании. В зависимости от сферы использования и технического задания, промышленный робот-манипулятор может быть оснащён следующими механизмами:
- захватами различных типов;
- сварочной головкой;
- фрезой;
- лазерным сканером и пр.
Преимущества промышленного робота-манипулятора
Преимущества использования оборудования данного типа очевидны: существенно повышается точность выполняемых операций, возрастает их безопасность, снижается количество брака. Помимо этого, робот выдерживает большие нагрузки в течение длительного времени. Человек так работать не может. Соответственно, рентабельность производства существенно возрастает. Поэтому промышленные роботы достаточно быстро окупают влажения на их покупку и внедрение.
Помимо этого, робот выдерживает большие нагрузки в течение длительного времени. Человек так работать не может. Соответственно, рентабельность производства существенно возрастает. Поэтому промышленные роботы достаточно быстро окупают влажения на их покупку и внедрение.
Компания «ДС-Роботикс» рекомендует вам внедрить на своём предприятии эти дистанционно управляемые машины. Они являются незаменимыми помощниками во многих сферах промышленности. Благодаря их внедрению вы сможете повысить конкурентоспособность и сделать свой бизнес ещё более успешным. Наша компания занимается внедрением роботов от ведущих производителей — компаний Kuka и ABB — их роботы уже зарекомендовали себя как надежные помошники в любой отрасли промышленности.
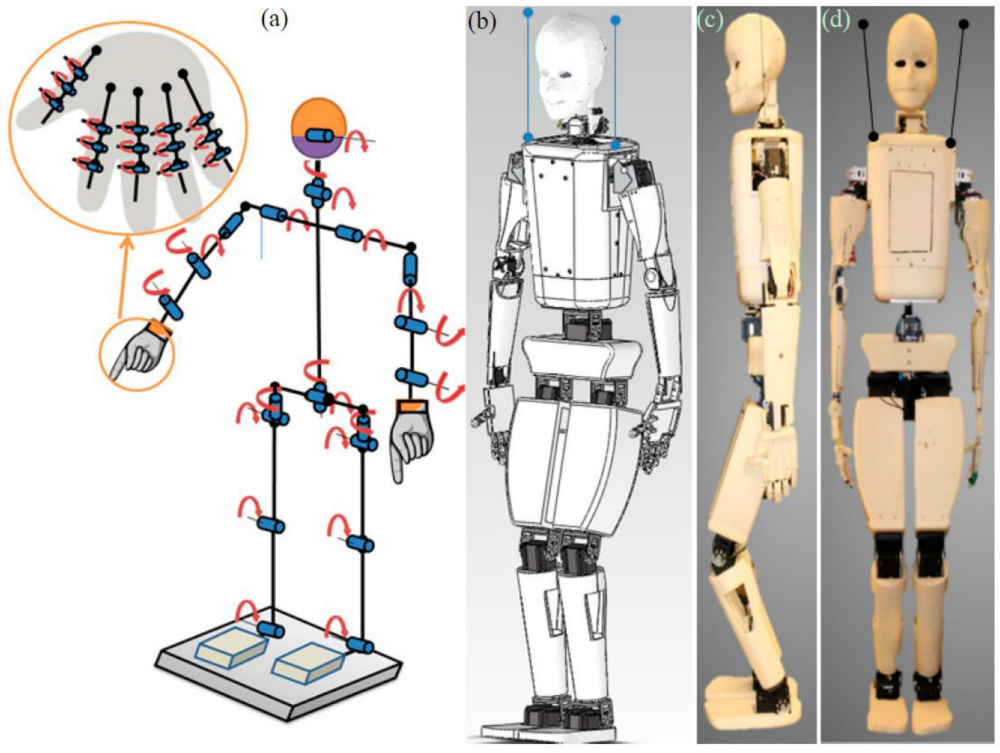
Чтобы заменить человека на производстве, нужна его усовершенствованная копия – к такому выводу пришли инженеры, впервые создавшие робототехнику. Однажды это открытие стало настоящим техническим прорывом, а сегодня используется предприятиями едва ли не во всех отраслях производства.
Промышленный манипулятор – это тип робота, который по внешнему исполнению, функционалу подобен человеческой руке. Он может работать как самостоятельное устройство или являться составным элементом роботизированного комплекса. Он управляется дистанционно, сводя к минимуму вовлеченность специалистов в физически сложную, монотонную механическую работу.
ДС-РОБОТИКС предлагает широкий выбор производственных роботов манипуляторов? с которым можно ознакомиться в каталоге.
Устройство робота-манипулятора
Роботизированная рука управляется при помощи программного обеспечения. Конструкция не подразумевает наличия гидравлики или пневматики – все процессы построены на электромеханике.
В структуру входит ряд компонентов.
- Рабочий орган – устройство, выполняющее технологические операции, воздействующее на объект манипулирования. Это инструмент (фреза, сварочная головка, лазерный сканер) или захватное устройство.
- Опорные конструкции – элементы, обеспечивающие прочность, жесткость фиксации.
 В зависимости от специфики робота, несущие конструкции могут представлять собой стойки, колонны или другие решения.
В зависимости от специфики робота, несущие конструкции могут представлять собой стойки, колонны или другие решения. - Манипуляционная система – это сложный механизм с разомкнутой кинематической цепью, состоящий из большого количества звеньев. Служит для пространственной ориентации рабочего органа, его переноса к точке работы.
- Привод – компонент, который преобразует энергию в механическое движение. Действует согласно параметрам, заданным при помощи программного обеспечения. Привод, в свою очередь, состоит из энергоустановки, двигателей, передаточных механизмов.
- Система программного управления – это «ядро» автоматизированного помощника, позволяющее машине самостоятельно выполнять задачи без непосредственного участия человека. При помощи программирования оператор формирует управляющие сигналы, которые запускают выполнение операций.
Система состоит из следующих элементов:
- пульта управления;
- запоминающего устройства; вычислительного устройства;
- блоков управления приводами манипулятора;
- технологического оборудования.

Разновидности роботов-манипуляторов
Классифицируют их по широкому диапазону признаков. Приведем основные из них.
- По количеству осей:
- 4-осевые – применяются для фасовки и укладки продукции;
- 6-осевые – используются для прочих операций.
2. По степени подвижности: от 2 до 6 уровня. Чем выше параметр, тем более точно робот-манипулятор производит наклоны, сжатие, вращение – другими словами, имитирует движение человеческой руки.
3. По типу операций:
- универсальные – выполняют основные, а также вспомогательные задачи, робота можно быстро переориентировать на новый вид работы;
- подъемно-транспортные – перемещают объекты в пространстве;
- производственные – выполняют конкретные технологические задачи: покраску, сварку, резку, сортировку, сверление, гибку.
- По грузоподъемности:
- легкие – до 10 кг;
- средней грузоподъемности – до 200 кг;
- тяжелые – до 1 тонны;
- сверхтяжелые – более 1 тонны.

Автоматизированные устройства помогают повысить эффективность предприятий в различных сферах: металлургии, автомобилестроении, химической, пищевой, легкой промышленности – это далеко не все направления.
На мировом рынке существует большой выбор роботизированных комплексов. Новые технологии становятся все более доступными также для малого и среднего бизнеса. Приобретение промышленного манипулятора – это не расход, а инвестиция! Сферы применения в производстве разнообразны.
Почему стоит купить робота-манипулятора
Внедрение роботизированного манипулятора позволяет тысячам предприятий решать несколько важнейших задач:
- увеличивать объем выпуска продукции;
- повышать качество выпускаемых изделий, продуктов;
- сокращать производственный цикл за счет способности работать круглосуточно;
- освобождать сотрудников от выполнения физически обременительных и опасных для здоровья операций;
- автоматизировать монотонную работу.

ДС-РОБОТИКС уже много лет сотрудничает с лучшими компаниями, которые занимаются проектированием – это европейские производители KUKA, ABB. Купить манипулятор, подходящий для производства — легко, оставьте заявку, и мы свяжемся с вами.
Современные роботокомплексы, с одной стороны, представляют собой сложные высокотехнологичные системы, а с другой, они просты в эксплуатации. Не нужно быть программистом, чтобы научиться ставить перед машиной производственные задачи. Более того, многие управляются голосом! Всю самую сложную работу берем на себя: наши инженеры полностью подготовят машины к использованию, так что вашим сотрудникам останется задавать простые алгоритмы и контролировать качество работы.
Каждый клиент задается вопросом сколько стоит промышленный робот с установкой и обучением сотрудников, ответить сразу на этот вопрос невозможно. Необходимо учесть, что цена уникальна для каждого производства. Просто сообщите ДС-РОБОТИКС, какое оборудование вам необходимо, и мы подскажем выгодное решение. Наши специалисты сопровождают каждый проект от поступления заявки до внедрения оборудования в работу производственного комплекса. Мы научим ваших сотрудников работать с новой техникой и обеспечим сервисное обслуживание.
Наши специалисты сопровождают каждый проект от поступления заявки до внедрения оборудования в работу производственного комплекса. Мы научим ваших сотрудников работать с новой техникой и обеспечим сервисное обслуживание.
Запрос на обратную связь
Укажите Ваше имя и телефон.
Мы с Вами обязательно свяжемся.
Ваше имя *
Телефон *
* обязательные поля
Согласие на обработку персональных данных в соответствии с Пользовательским соглашением
Спасибо за Ваше обращение!
Наши менеджеры обязательно свяжутся с Вами.
составные части, как устроен и что это такое
Сейчас в качестве главной движущей силы в развитии производств и их автоматизации выступают промышленные роботы-манипуляторы.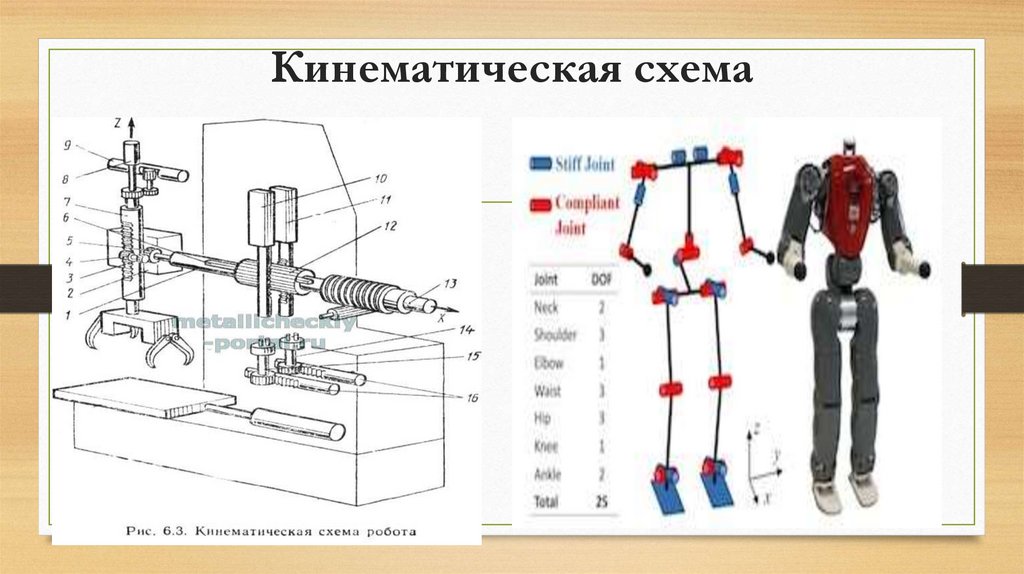 Их внедрение позволяет предприятиям выйти на новый уровень выполнения задач, увеличить эффективность работы и перераспределить обязанности между устройствами и людьми.
Их внедрение позволяет предприятиям выйти на новый уровень выполнения задач, увеличить эффективность работы и перераспределить обязанности между устройствами и людьми.
Что такое промышленные роботы манипуляторы: описание
Робот-манипулятор — это промышленное оборудование, которое выполняет функции человеческой руки. Это может быть как отдельное устройство, так и составная часть сложного роботизированного комплекса.
Отдельные части механизированной руки имеют соединения, которые позволяют выполнять вращательные или поступательные движения. Это обеспечивает многофункциональность таких машин.
С каждым годом увеличивается потребность в снижении эксплуатационных расходов на предприятиях, из-за чего спрос на промышленную робототехнику постоянно увеличивается. Это способствует развитию отрасли.
Уменьшения расходов на предприятиях можно добиться при помощи снижения количества ошибок, потерь сырья и числа несчастных случаев. Также необходимо сделать предприятия более производительными и технологически гибкими.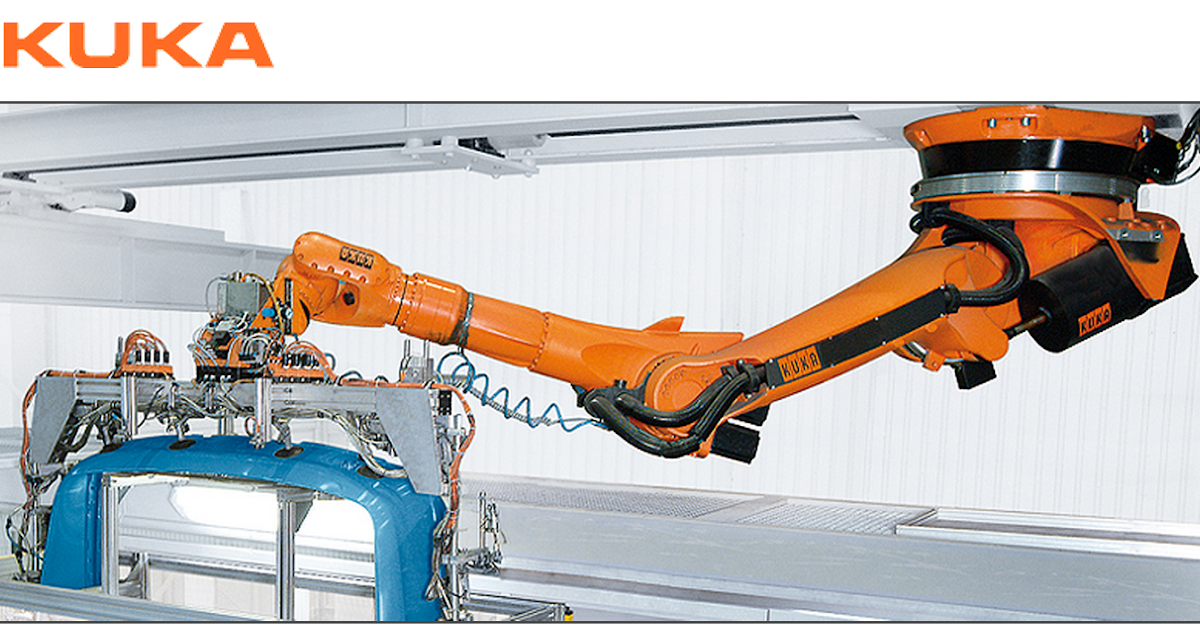 Все эти вопросы решают роботы-манипуляторы. Они способны работать с высокой точностью даже в опасных условиях.
Все эти вопросы решают роботы-манипуляторы. Они способны работать с высокой точностью даже в опасных условиях.
Устройство: механизмы и характеристики
Механическая подвижная рука управляется при помощи электронной системы. Зачастую в современных устройствах не применяется гидравлика и пневматика, так как такие системы слишком дорогие в эксплуатации и недолговечные. Наиболее важные характеристики руки-манипулятора:
- Количество осей. Зачастую у промышленных роботов 4 оси. Такие устройства используются для сортировочных и фасовочных работы. Также манипулятор может иметь 6 осей, если нужно выполнять более сложные работы.
- Количество степеней свободы. Их может быть от 2 до 6. Чем больше степеней свободы, тем больше у робота возможностей и тем точнее устройство может повторять движения человеческой руки.
Основные части устройства:
- Плечо. Так называют неподвижную основу, на которую крепятся все остальные элементы.
- Локоть. Определяет главное положение манипулятора в пространстве.
- Запястье. Этот элемент отвечает за точность выполнения работы.
- Кисть. Захватывает предметы и выполняет другие действия. В качестве «пальцев» могут выступать присоски, распылители, отвертки, сварочные и другие элементы.
Количество подвижных частей и их сочленений может меняться в зависимости от потребностей. Кроме того, у одного робота может быть не одна, а сразу несколько рук, что позволяет автоматизировать одновременно несколько рутинных операций.
Манипуляторы бывают стационарными и мобильными. Вторые могут перемещаться по помещению при помощи колес, гусениц и др. На подвижных роботах всегда устанавливают специальные датчики движения для обеспечения безопасности работников и производственного процесса.
Как работают?
Отдельные части манипулятора перемещаются в пространстве благодаря приводам, которые являются аналогами мышц у человека. Если в качестве источника механической энергии выступает электродвигатель, то такие приводы называются электрическими. Также бывают гидравлические и пневматические приводы, но они практически не используются.
Также бывают гидравлические и пневматические приводы, но они практически не используются.
Управляют роботом с мобильного или стационарного пульта. Оператору необходимо следить за параметрами устройства и регулярно контролировать результаты работы. Эти операции можно производить дистанционно, используя видеокамеру. Человеку даже не нужно находиться в одном помещении с манипулятором.
Также существуют устройства, в которых реализована возможность самообучения. Работу единожды выполняют в ручном режиме, после чего робот запоминает всю последовательность действий и повторяет их.
Сферы применения
Роботы-манипуляторы подразделяют в зависимости от того, в какой области промышленности они используются. Основные сферы применения:
- Автомобилестроение. К примеру, на заводе Tesla установлено более 160 роботизированных рук, которые выполняют большую часть операций по сборке автомобилей. Причем их количество постоянно увеличивается.
- Электроника и электротехника.
 Yaskawa Motoman Mh22 — это шестиосевой манипулятор, который выполняет сборку жестких дисков для компьютеров.
Yaskawa Motoman Mh22 — это шестиосевой манипулятор, который выполняет сборку жестких дисков для компьютеров. - Машиностроение и металлообработка. На таких производствах манипуляторы выполняют финишную обработку и шлифовку различных деталей из металла и композитных материалов.
- Химическая промышленность. В этой отрасли роботов применяют для автоматизации работы с опасными веществами. К манипуляторам, используемым в химической промышленности, предъявляются особые требования. Устройства должны быть устойчивыми к агрессивным средам и иметь высокую точность позиционирования.
- Медицина и фармацевтика. В медицине манипуляторы используют в качестве помощника на операциях. Роботы должны быть очень чувствительными, чтобы осторожно выполнять все действия. Также такие устройства позволяют совершать хирургическое вмешательство удаленно.
- Продовольствие и сельское хозяйство. В сельском хозяйстве применяют мобильные манипуляторы для сбора урожая.
Типы промышленных роботов для манипуляционных работ
Сейчас промышленные роботы условно подразделяют на 3 типа:
- автоматические;
- биотехнические;
- интерактивные.

Они имеют разные возможности. Выбор зависит от задач производства.
Коллаборативный робот-манипулятор Universal Robots UR 3e
UR 3e — это небольшой настольный манипулятор, которых хорошо подходит для автоматизации рабочих мест и выполнения легких операций по сборке. Компактный робот весит 11 кг, а его грузоподъемность составляет 3 кг. Способен вращаться во всех сочленениях на 360 градусов.
Коллаборативный робот-манипулятор Universal Robots UR 5e
Это тоже относительно компактное устройство. Его вес составляет 20,6 кг, а грузоподъемность — 5 кг. Имеет 6 осей и досягаемость в пределах 850 мм. Точность составляет 0,03 мм.
Применяется в основном для сборочных работ предметов средних размеров. Но подходит для автоматизации различных процессов, включая сварку.
Коллаборативный робот-манипулятор Universal Robots UR 10e
Манипулятор UR 10e является самой большой моделью от компании Universal Robots. Он предназначен для выполнения масштабных работ, при которых особую роль играют точность и надежность.:quality(80)/images.vogel.de/vogelonline/bdb/1215600/1215660/original.jpg) Робот может в автоматическом режиме выполнять задачи с полезной нагрузкой в 10 кг.
Робот может в автоматическом режиме выполнять задачи с полезной нагрузкой в 10 кг.
Радиус действия механической руки достигает 1300 мм. Наибольшую эффективность манипуляторы показывают на больших площадях.
Преимущества и перспективы использования
Механизированные руки для промышленных работ сейчас являются основой любого производства. При внедрении роботов в свои рабочие процессы компания обеспечивает автоматизацию, что повышает эффективность и делает производство более надежным и универсальным.
Нередко применение робототехники является единственным способом выживания компании в конкурентной среде. Использование промышленных роботов позволяет уменьшить человеческий труд и удешевить производство, так как техника справляется с работой намного качественнее и быстрее.
Среди других преимуществ применения робототехники можно выделить такие:
- Манипуляторы отлично заменяют ручной труд.
- Использование автоматов в промышленности значительно увеличивает производительность.
 Кроме того, роботы способны работать круглосуточно.
Кроме того, роботы способны работать круглосуточно. - Повышение экономических показателей. Техника заменяет человеческий труд, что позволяет сильно снизить расходы по зарплате сотрудникам.
- Безопасность. Использование промышленных роботов особенно актуально на вредных для людей производствах, например в литейной промышленности, при покрасочных работах, на химических предприятиях и т. д.
- Качество. Главный фактор применения робототехники — качество обработки. Точность промышленных манипуляторов достигает 0,02 мм с бесконечным количеством повторений. Если исключить из производственного процесса ручной труд, то вероятность возникновения ошибок очень мала.
- Современная техника почти не требует обслуживания. Это обусловлено применением асинхронных двигателей и высококачественных редукторов.
Современные роботы-манипуляторы способны выполнять практически любую работу с высокой точностью Автоматизация производств при помощи робототехники ведет к повышению производительности и рентабельности.
- 20 декабря 2020
- 6859
Получите консультацию специалиста
Что такое робот-манипулятор? Руководство
Все части робота играют роль в его работе и определяют, для каких задач он может быть использован. Таким образом, глубокое понимание таких деталей будет первым шагом к выбору правильного промышленного робота для ваших нужд. Хотя есть много частей, которые нужно рассмотреть, возможно, было бы полезно начать с одной из ключевых; робот-манипулятор.
Содержание
Что такое роботизированная манипуляция?
Робот — это машина, запрограммированная на автоматическое предсказуемое выполнение определенных задач. Для этого он должен обрабатывать объекты и либо перемещать их, либо воздействовать на них с помощью таких действий, как сварка или сверление. Именно эта обработка или процедуры, выполняемые над объектами, называются роботизированными манипуляциями. Таким образом, это определение дает нам контекст для определения роботов-манипуляторов.
Таким образом, это определение дает нам контекст для определения роботов-манипуляторов.
Робот-манипулятор представляет собой рукоятку, соединенную с телом робота и используемую для выполнения задач. Робот без манипулятора был бы эквивалентом человека, выполняющего задачу со связанными за спиной руками, это просто нежизнеспособно. Именно по этой причине роботы-манипуляторы также известны как роботы-манипуляторы.
Из чего состоят роботы-манипуляторы?
Источник: Kawasaki
Роботы-манипуляторы состоят из ряда соединений и звеньев, слитых во внутреннюю структуру. Снаружи рука-манипулятор только кажется установленной на роботе. Однако ряд соединений и звеньев уходит дальше в тело робота, чтобы связать их. Это гарантирует совместную работу робота и манипулятора в скоординированных движениях жидкости.
Звенья — это жесткие компоненты, соединяющие разные части робота. Несмотря на то, что их жесткость обеспечивает прочную конструкцию, это затрудняет перемещение частей робота во время выполнения задач. В результате к звеньям добавляются суставы для повышения гибкости. Соединения — это подвижные компоненты, которые скользят друг относительно друга, обеспечивая линейное, вращательное или вращательное движение частей робота. Они построены и работают так же, как человеческий локоть или колено.
В результате к звеньям добавляются суставы для повышения гибкости. Соединения — это подвижные компоненты, которые скользят друг относительно друга, обеспечивая линейное, вращательное или вращательное движение частей робота. Они построены и работают так же, как человеческий локоть или колено.
Манипуляторы роботов в разных роботах
Источник: www.brainkart.com
Типы и количество соединений, которые имеет робот-манипулятор, определяют его степени свободы, форму его рабочей зоны и способы его применения. Это, в свою очередь, определяет, как робот классифицируется. Для иллюстрации рассмотрим различные типы роботов и конструкции их роботов-манипуляторов.
Декартовский робот- его манипуляторы связаны с помощью 3 призматических шарниров, которые перпендикулярны друг другу и обеспечивают только линейные скользящие движения. В результате декартовый робот классифицируется как 3-осевой робот и имеет геометрическую рабочую зону.
Полярный робот- рука и тело полярного робота соединены с помощью вращающегося шарнира. Этот тип соединения обеспечивает круговые движения, которые позволяют манипулятору полярного робота перемещаться в пределах 3 осей в системе полярной геометрии.
Этот тип соединения обеспечивает круговые движения, которые позволяют манипулятору полярного робота перемещаться в пределах 3 осей в системе полярной геометрии.
Цилиндрический робот- цилиндрический манипулятор робота работает с использованием поворотного шарнира в основании и линейного шарнира, который позволяет ему двигаться вдоль вертикальной оси. Установка этих шарниров позволяет манипулятору удлиняться и втягиваться, но его рабочий диапазон по-прежнему довольно ограничен небольшой цилиндрической формой.
Робот SCARA – шарниры робота SCARA вращаются и облегчают его движения по осям XY, оставаясь при этом жесткими по оси Z. Благодаря тому, что суставы расположены в горизонтальной плоскости, роботы SCARA имеют широкие рабочие зоны полукруглой формы.
Шарнирный робот – Шарнирный робот имеет самые гибкие манипуляторы среди всех других роботов. Рука робота-манипулятора соединена с корпусом робота поворотным соединением, а локоть и другие части руки связаны вращательными соединениями. Вращающиеся шарниры позволяют руке вращаться, наклоняться и рыскать, создавая таким образом 6-осевой робот.
Вращающиеся шарниры позволяют руке вращаться, наклоняться и рыскать, создавая таким образом 6-осевой робот.
Применение роботов-манипуляторов
Гибкость различных роботов-манипуляторов может быть использована для автоматизации процессов в различных отраслях. Примеры такого применения включают:
Роботизированная хирургия- В этом приложении шарнирный робот-манипулятор оснащен хирургическими инструментами в качестве концевых эффекторов. Он управляется удаленно хирургом для выполнения хирургических маневров.
Самовывоз – это обычное промышленное приложение, в котором роботы-манипуляторы применяются для повторяющихся задач захвата и размещения, таких как упаковка товаров.
Сборка печатной платы – В данном случае робот-манипулятор заменяет руки человека для сборки микродеталей на печатной плате с высокой точностью и скоростью.
Заключение
Можно с уверенностью сказать, что значение робота-манипулятора в робототехнике идет дальше, чем просто функция.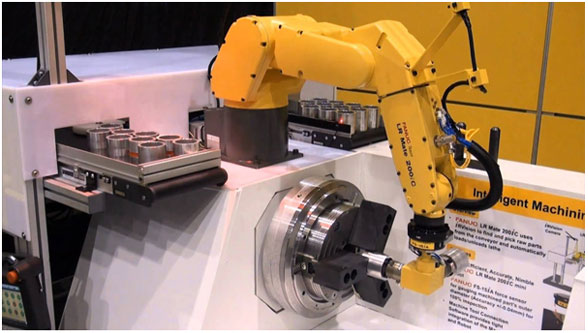 Далее идет определение структуры и способов применения робота. Качественные манипуляторы от авторитетного 9Таким образом, 0003 производитель роботов-манипуляторов станет достойной инвестицией для всех, кто занимается робототехникой.
Далее идет определение структуры и способов применения робота. Качественные манипуляторы от авторитетного 9Таким образом, 0003 производитель роботов-манипуляторов станет достойной инвестицией для всех, кто занимается робототехникой.
роботов-манипуляторов? Не обязательно плохо
Автоматизированный Спутник-1, запущенный в октябре 1957 года, вошёл в историю как первый искусственный спутник Земли. Два десятилетия спустя миссии «Вояджер» начали процесс, в ходе которого роботы были отправлены во внешние пределы нашей Солнечной системы… и за ее пределы. Совсем недавно машина под названием CIMON (Crew Interactive Mobile Companion) стала первым роботом с искусственным интеллектом в космосе. Действительно, роботы бывают разных форм и имеют множество применений, но в этой части мы собираемся обсудить более низкое использование космической робототехники — «орбитальные манипуляции».
Что такое орбитальная манипуляция? Что мы можем с этим сделать?
Манипуляции на орбите (или «манипуляции на орбите») означают использование роботизированных средств для выполнения задач на орбите. Несмотря на сложность, это не особенно ново.
Несмотря на сложность, это не особенно ново.
Известный ныне «роботизированный манипулятор» космического шаттла Canadarm (известный также как система удаленного манипулятора шаттла или SRMS) был впервые испытан на орбите еще в 1981 году. Он использовался, среди прочего, для построить Международную космическую станцию (МКС) и запустить космический телескоп Хаббл. Хотя Canadarm1 был выведен из эксплуатации в июле 2011 года, Canadarm2 до сих пор живет на МКС.
По мере увеличения возможностей орбитальных манипуляций он найдет новые применения в космосе. Вот четыре примера.
Очистка «космического мусора»
Одной из основных (и все более растущих) проблем является «космический мусор» (также известный как «космическое загрязнение» и «космический мусор»). Космический мусор представляет собой ряд обломков, оставленных людьми на орбите, мчащихся вокруг Земли со скоростью примерно 18 000 миль в час. В мелком масштабе сюда входят пятна краски, отколовшиеся от корабля, а в более крупном масштабе — вышедшие из строя спутники и выброшенные ракетные ускорители.
Этот космический мусор все чаще становится предметом разговоров о влиянии, которое мы оказываем на окружающую среду, причем космос является частью этой среды. По мере того, как количество этого мусора будет расти, а наша потребность в использовании космической среды будет возрастать, это станет все более серьезной проблемой.
Таким образом, технологии, способные улавливать быстро движущиеся обломки для их безопасного спуска с орбиты, будут иметь важное значение для безопасности околоземных операций. Предполагаемые идеи включают сеткообразные устройства и электроклейкие штанги.
Движущийся корабль
НАСА описывает процесс захвата корабля или модуля с помощью роботизированных средств как «космический захват». Движущиеся корабли уже доказали свою важность и будут становиться еще более важными, поскольку мы продолжаем шире использовать пространство.
Особое внимание следует уделить перемещению вещей, у которых нет собственной двигательной установки, особенно хрупких или несущих важные грузы. Гораздо проще состыковаться с кораблем, у которого есть собственные средства передвижения (например, собственный двигатель).
Гораздо проще состыковаться с кораблем, у которого есть собственные средства передвижения (например, собственный двигатель).
Это особенно важно для спутников. Традиционно подход к спутниковому покрытию заключался в создании небольшого количества более крупных и дорогих спутников. Но это меняется. Новые спутниковые «созвездия» состоят из более многочисленных, меньших по размеру и более дешевых «микроспутников». Одним из таких громких примеров является SpaceX, которая планирует запустить около 12 000 спутников в составе своей группировки Starlink.
Результатом таких созвездий является большее количество кораблей, которые имеют большую вероятность выхода из строя. Наличие способа безопасного управления ими будет иметь важное значение.
Замена полезной нагрузки и ремонт
Десятилетиями космические миссии помогали доставлять на орбиту полезную нагрузку. Например, в 2018 году астронавты заменили стареющие «руки» Canadarm2. А по мере увеличения количества и разнообразия платформ в космосе взаимозаменяемые полезные нагрузки могут обеспечить экономию средств и большую гибкость задач на существующих платформах. Например, дешевле перепрофилировать существующую неиспользуемую платформу, чем сводить ее с орбиты и запускать на ее месте другую. Но до этого еще далеко.
Например, дешевле перепрофилировать существующую неиспользуемую платформу, чем сводить ее с орбиты и запускать на ее месте другую. Но до этого еще далеко.
Орбитальное производство
Сделано в космическом комплексе аддитивного производства (AMF), работающем на МКС, представляет собой первый пример орбитального производства. Made In Space утверждает, что на сегодняшний день произвела более 200 инструментов, активов и деталей. Однако это лишь первый шаг на долгом пути.
Пройдет немало времени, прежде чем мы увидим крупномасштабное орбитальное производство. В настоящее время большинство объектов изготавливаются на поверхности, а затем выводятся на орбиту. В некоторых случаях различные компоненты перемещаются с разными полезными нагрузками, а затем собираются в космосе (роботом).
Проблема, конечно, в том, что доставлять материалы в космос дорого; при этом цена пропорциональна размеру и массе рассматриваемой полезной нагрузки. А для деликатных компонентов еще одним соображением является сила запуска.
В будущем есть надежда на создание роботов на орбите. Это могут быть как отдельные компоненты, так и целые платформы, такие как станции с экипажем или спутники.
Вполне реальная перспектива. На Земле промышленные роботы (с некоторым контролем) уже используются для создания всего, от автомобилей до сложных электронных компонентов. МКС была построена в основном в космосе. Таким образом, мы можем ожидать появления новых космических приложений по мере развития ИИ и автоматизации.
Это не только значительно сократит расходы, но и поможет достичь экологических целей — например, цели Великобритании по сокращению выбросов парниковых газов до нуля к 2050 году.
Долгая история и светлое будущее go, он не захватывает заголовки, как «Вояджер» или «Спутник», но орбитальные манипуляции станут неотъемлемой частью нашего перехода к космическим видам.
В краткосрочной перспективе мы можем ожидать развития стыковки и швартовки. Под стыковкой понимается соединение двух свободно летающих космических аппаратов.
Всего комментариев: 0