Манипулятор применение: Кран-манипулятор. Применение и преимущества Автомобильный портал 5 Колесо
Содержание
Что такое манипулятор, применение манипулятора
15/03/2017
В современное время большой популярностью пользуется спецтехника, которая применяется во многих отраслях. Кран-манипуляторы также являются востребованной техникой, которая способна облегчить строительные работы и выполнить транспортировку грузов. Наша фирма «Вовди» предоставляет в аренду кран-манипуляторы на долгий или короткий срок. Сотрудничаем с крупными организациями и с физическими лицами.
Сферы использования кран-манипуляторов
Кран-манипулятор служит грузовым транспортным средством, которое снабжено крановой установкой. С его помощью погружают груз, перевозят его и в дальнейшем разгружают на объекте. Это основное назначение работы такой специальной техники.
Манипуляторы нашли свое применение в областях:
- промышленной;
- строительной;
- сфере обслуживания;
- в бытовых и хозяйственных нуждах.
Кран-манипуляторы довольно маневренные, что позволяет их использовать на небольших площадках. Использоваться такая спецтехника может не только в вышеперечисленных областях. Она также может использоваться при эвакуации автомобильных средств и при доставке грузов в тяжело доступные места.
Использоваться такая спецтехника может не только в вышеперечисленных областях. Она также может использоваться при эвакуации автомобильных средств и при доставке грузов в тяжело доступные места.
Благодаря функциональности, данная грузовая техника может помочь в ландшафтной, строительной, коммунальной, сельскохозяйственной отрасли.
Особенностями манипуляторов служат:
- надежность;
- мобильность;
- точность передвижения;
- маневренность.
С их помощью можно осуществлять работы различной сложности. Современная спецтехника может взять груз, расположенный на расстоянии до 20 метров от платформы и переместить его аккуратно и точно. Манипуляторы можно применять при перевозке хрупких грузов. При работе на таком транспорте нет необходимости привлекать вспомогательные единицы грузовой техники. В нашем автопарке есть манипуляторы от отечественных и импортных производителей. Все они отличаются грузоподъемностью и габаритами. Предоставляем в аренду манипуляторы, которые наиболее всего подходят для выполнения тех или иных задач.
Преимущества использования кран-манипуляторов в аренду
С помощью кран-манипулятора можно перевозить крупногабаритное оборудование, грузы, вывезти строительный мусор, доставить стройматериалы до объекта. Наша компания «Вовди» предоставляет в аренду кран-манипуляторы на выгодных условиях.
Преимущества аренды такой спецтехники заключаются в следующем:
- Высокий показатель экономичности — с помощью такой спецтехники можно произвести большой объем различных работ. Таким образом, любая организация, которой необходим манипулятор в работе, экономит средства на аренде другой спецтехники.
- Нет необходимости приобретать дорогостоящую технику и в дальнейшем обслуживать ее.
- Не придется нанимать сотрудника для управления кран-манипулятором, а соответственно — это экономия бюджета организации.
- Арендовать грузовую технику можно в любое время на длительный или короткий период.
Манипулятор будет отличным помощником на стройплощадке и в остальных отраслях. Чтобы арендовать кран-манипулятор в нашей организации, необходимо позвонить нашим операторам и пояснить, для каких работ необходима спецтехника и на какой срок. Наши специалисты помогут подобрать наиболее подходящую модель техники. После согласования, с клиентом подписываются соответствующие документы, и отдается в пользование кран-манипулятор. При необходимости предоставляем квалифицированных водителей с большим опытом работы и стажем вождения такой спецтехники.
Чтобы арендовать кран-манипулятор в нашей организации, необходимо позвонить нашим операторам и пояснить, для каких работ необходима спецтехника и на какой срок. Наши специалисты помогут подобрать наиболее подходящую модель техники. После согласования, с клиентом подписываются соответствующие документы, и отдается в пользование кран-манипулятор. При необходимости предоставляем квалифицированных водителей с большим опытом работы и стажем вождения такой спецтехники.
Для чего нужен кран манипулятор. Варианты применения — Служба эвакуации 112
Кран-манипулятор – это вид техники, которая выделяется мобильной платформой и наличием телескопической стрелы. Такое оснащение позволяет расширить сферу возможностей транспортного средства, упрощает процесс погрузки и разгрузки, особенно тяжелых предметов, существенно экономит финансовые затраты, рационализирует время, потраченное на эти работы. Основные функции крана-манипулятора – это подъем грузов и их перевозка. В большинстве случаев его удобнее и дешевле брать в аренду на время выполнения работ.
Малоэтажное строительство — в качестве крана
Манипуляторы – это уменьшенные аналоги стандартных кранов, которые удобно арендовать при возведении небольших построек. Основное его применение связано с подъемом грузов на высоту. Для этой цели достаточно оборудования с боковой платформой длиной 4-6 м. В пользу выбора этой техники говорят следующие ее качества:
- маневренность,
- небольшие размеры,
- подъем грузов весом до 1500 кг.
- блокировка колес, руля,
- невозможность управления автомобилем,
- поломка пневматической подвески,
- ДТП, приведшее к сильным повреждениям,
- отсутствие колес.
- маневренность и пространственная свобода, что дает возможность использовать технику на узких улицах города или на небольшой строительной площадке,
- высокая скорость работ по погрузке, выгрузке, перевозке,
- сочетание в одном транспорте возможностей погрузчика с перевозчиком на любые расстояния,
- нет необходимости в грузчиках: процессом руководит сам водитель из кабины авто,
- за счет свободного ориентирования грузов в пространстве краны справляются с решением любых погрузочно-разгрузочных работ,
- экономичность, так как техника арендуется на определенное время.
- Тип складывания стрелы. Они бывают двух типов: Z-образная (без лебедки) проста в управлении, имеет высокую грузоподъемность и компактные размеры. L-образная (с лебедкой и крюком) может работать с перемещением груза под любым углом, полностью контролируя его расположение.
- Вылет и грузоподъемность стрелы. Они выбираются под тип груза, при этом стрела должна быть длиннее кузова на 1-2 м.
- Грузоподъемность борта. Краны бывают малого (1-3 тонны), среднего (5-10 тонн) и большего (более 10 тонн) тоннажа. При аренде рекомендуется выбирать машину с небольшим запасом по грузоподъемности.
С помощью манипулятора можно подавать строительные материалы на крышу здания или в оконный проем, устанавливать емкости на территории.
Доставка материалов
Аренда манипулятора часто востребована, когда нужно доставить строительные материалы на объект. Бетонные блоки, арматура, дерево, плиты – все это можно транспортировать с помощью этого оборудования. В зависимости от перевозимого материала может потребоваться техника определенной грузоподъемности, при этом длина стрелы может быть 6 м или 8 м. Крановая установка крепится позади автомобиля, а водитель изнутри управляет ею и выгружает товары на территорию. Аренда существенно экономит время на процесс перевозки, а маневренному автомобилю легче подъехать к объекту, особенно в условиях ограниченной по размерам территории.
Крановая установка крепится позади автомобиля, а водитель изнутри управляет ею и выгружает товары на территорию. Аренда существенно экономит время на процесс перевозки, а маневренному автомобилю легче подъехать к объекту, особенно в условиях ограниченной по размерам территории.
Погрузка/выгрузка
Краны-манипуляторы – отличное решение, когда нужно доставить товары из магазина до получателя или от склада/ поставщика в магазин. В зависимости от объема груза можно подобрать модель разной грузоподъемности (от 3 тонн до 10 тонн) с бортовой платформой определенной длины (минимум 4 м). Манипуляторная установка отличается устойчивой платформой, поэтому на ней можно перевозить грузы на любые расстояния.
Строительно-монтажные работы
С помощью манипулятора часто ведутся строительно-монтажные работы, например, устанавливаются рекламные щиты на высоте, металлические конструкции, опоры. Оборудование также помогает погрузить на платформу и выгрузить с установкой на объекте киоски, торговые павильоны.
Оборудование также помогает погрузить на платформу и выгрузить с установкой на объекте киоски, торговые павильоны.
Эвакуация авто
Очень часто услуги эвакуатора-манипулятора востребованы для транспортировки автомобиля. Конструктивные особенности техники позволяют аккуратно погрузить машину, вышедшую из строя, на платформу и перевезти ее до сервисного центра. Эвакуация может потребоваться в разных случаях:
Выдвигающаяся стрела позволяет эвакуировать поврежденное авто из кювета, канавы и вообще в стесненных условиях. Однако техникой можно воспользоваться не только в печальных ситуациях, но и в радостных, например, при покупке нового транспортного средства для его доставки владельцу.
Преимущества кранов-манипуляторов
Манипуляторная техника является эффективным помощником в решении проблем с транспортировкой, погрузкой и выгрузкой.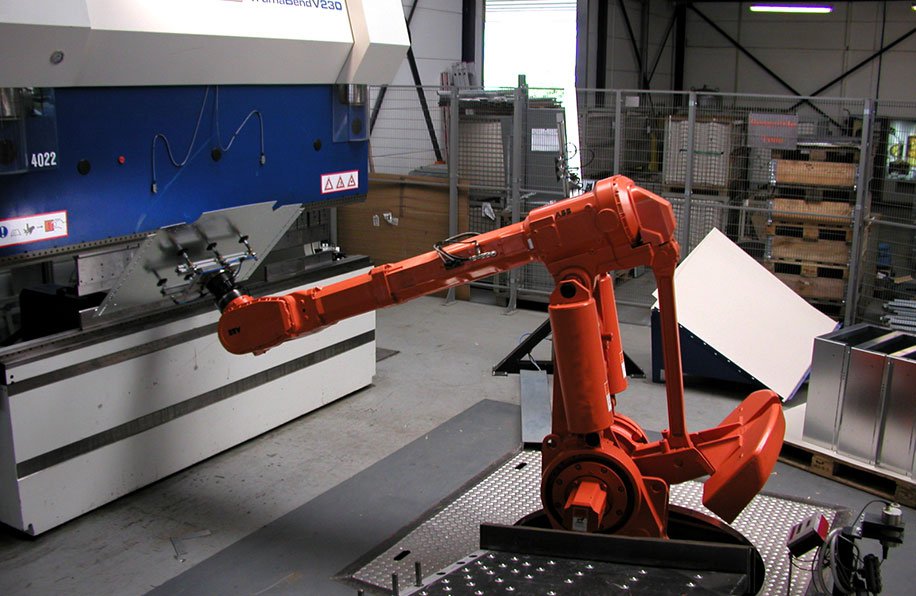 От грузоподъемности транспортных средств зависит сфера их применения и их функциональные возможности. В пользу аренды оборудования говорят следующие факторы:
От грузоподъемности транспортных средств зависит сфера их применения и их функциональные возможности. В пользу аренды оборудования говорят следующие факторы:
При необходимости кран-манипулятор можно дополнительно оснастить оборудованием, например, ковшом, если планируется работа с сыпучими материалами.
Какой манипулятор выбрать?
Краны-манипуляторы – это универсальное оборудование, которое подбирается под особенности груза, условий, где они будут работать, объемов работ и целей его применения. Для техники важными являются следующие характеристики:
Для техники важными являются следующие характеристики:
Наиболее популярны машины грузоподъемностью 1,5-3 тонн при длине кузова до 6 м. Как правило, их технических свойств и возможностей достаточно для выполнения стандартных работы – подъема и перевозки грузов.
Наша компания предлагает заказать эвакуатор с краном манипулятором в Екатеринбурге, если вы вдруг оказались в неприятной ситуации на дороге. Мы гарантируем оперативную техническую помощь, быстро решая вопрос с транспортировкой поврежденного автомобиля до сервисного центра. У нас можно заказать эвакуатор с краном манипулятором , грузоподъемность которых составляет от 3 до 7 тонн. Работаем быстро, качественно и круглосуточно!
Мы гарантируем оперативную техническую помощь, быстро решая вопрос с транспортировкой поврежденного автомобиля до сервисного центра. У нас можно заказать эвакуатор с краном манипулятором , грузоподъемность которых составляет от 3 до 7 тонн. Работаем быстро, качественно и круглосуточно!
Что такое роботы-манипуляторы? Обзор типов и приложений
Роботы регулярно используются для перемещения объекта из одного места в другое. Это может быть перемещение тяжелой экструзии из одной области производственного цеха в другую или деликатная операция на человеческом глазу.
Робот-манипулятор или робот-манипулятор является важным устройством в подобных задачах. Используемые для манипулирования материалами и объектами без непосредственного прикосновения человека, манипуляторы могут быть быстрее и точнее, чем люди-операторы, и иногда могут поднимать гораздо более тяжелые веса. Из-за этих важных преимуществ манипуляторы имеют широкий спектр типов и приложений.
В этой статье объясняются основы роботов-манипуляторов: что это такое, как они работают, их различные варианты и некоторые из наиболее полезных приложений в реальном мире.
В области робототехники манипуляторы представляют собой электронные устройства, предназначенные для взаимодействия с окружающей средой путем перемещения объектов из одного места в другое.
Манипуляторы обычно можно считать синонимами роботизированных рук; «манипуляция» описывает задачу, которую выполняют эти устройства, а «роботизированная рука» описывает их структуру, которая может (хотя и не всегда) напоминать человеческую руку. Роботизированная рука содержит различные сегменты, которые взаимодействуют друг с другом посредством скольжения или шарниров, что дает руке несколько степеней свободы (DoF). На крайнем конце руки (кисти, как ее иногда называют) находится концевой эффектор, такой как захват, который отвечает за непосредственное манипулирование объектом.
Манипуляторы могут быть автоматизированы — как в случае со многими задачами на заводе — или управляться оператором, например, во время операций с замочной скважиной в больнице или для подъема груза на складе. Известные роботы-манипуляторы, такие как производства Kuka и ABB, можно считать типами манипуляторов.
Поскольку манипуляторы состоят из нескольких секций, каждая из которых может двигаться по-своему, для управления общим движением руки используются сложные алгоритмы.
Прежде чем мы начнем рассматривать применение манипуляторов, мы классифицируем их по способу кинематической работы.
Руки роботов-манипуляторов обычно имеют от трех до шести степеней свободы, обеспечиваемых рядом суставов (аналогично плечевому, локтевому или запястному), которые соединяют различные звенья устройства (аналогично плечу, предплечью или Пальма). Соединения манипулятора обычно представляют собой вращательные или призматические соединения. [1]
[1]
Вращательное соединение (поворотное соединение): вращение вокруг одной оси, т. е. скручивающее движение
Призматическое соединение (линейное соединение): поступательное движение вокруг одной оси, т. е. движение разгибания
Цилиндрический шарнир: вращение и поступательное движение вокруг одной оси
Сферический шарнир (шаровой шарнир): три степени вращения
Тип рычага определяет его число степеней свободы, а также рабочее пространство (насколько далеко оно может простираться).
Различные конфигурации манипуляторов роботов
Робот с шарнирными руками
Шарнирные роботы с шарнирными руками предлагают максимально возможные степени свободы и обычно имеют от трех до шести шарнирных соединений. Самым большим преимуществом робота с шарнирной рукой является его широкий диапазон движений; однако он может быть менее точным, чем другие типы. Общие области применения включают дуговую сварку и окраску распылением.
Общие области применения включают дуговую сварку и окраску распылением.
Робот SCARA
Манипуляторы робота-манипулятора с селективным соответствием (SCARA) имеют один призматический шарнир для перемещения по оси Z и два параллельных вращательных шарнира. Роботы SCARA широко используются при сборке. Они часто могут поднимать более тяжелые грузы, чем другие типы роботов, поскольку два вращающихся шарнира не поднимают.
Декартовский (портальный) робот
Декартовы или портальные манипуляторы могут перемещаться по трем осям по системе рельсов, подобно печатающей головке 3D-принтера для моделирования наплавленным методом (FDM). Их очень легко программировать, и они могут поднимать тяжелые грузы. Обычное использование включает в себя самовывоз и нанесение герметика.
Сферический (полярный) робот
Сферические или полярные роботы-манипуляторы имеют два вращающихся шарнира, в том числе один в основании, и третий призматический шарнир, позволяющий выдвигать руку. Эти манипуляторы требуют менее сложных алгоритмов и полезны для операций сварки и захвата.
Эти манипуляторы требуют менее сложных алгоритмов и полезны для операций сварки и захвата.
Цилиндрический робот
Цилиндрические роботы-манипуляторы имеют вращающееся соединение в основании и два призматических соединения: одно для перемещения по оси Z и одно для перемещения по горизонтальной плоскости. Эта роботизированная система жесткая и точная, но встречается реже, чем другие типы.
Дельта-робот (параллельный)
Дельта-роботы обычно крепятся к потолку рабочей зоны и имеют три или шесть рук, каждая со своим вращающимся или призматическим шарниром. Жесткие и быстродействующие дельта-роботы-манипуляторы используются для таких задач, как захват и установка, сборка и нанесение герметика.
Мы также можем классифицировать манипуляторы по их концевым эффекторам, инструментам на концах рук, которые в конечном итоге определяют, какую операцию может выполнять манипулятор. Концевые эффекторы манипулятора обычно представляют собой некую форму захвата, при этом количество и материал «пальцев» зависят от конечного использования устройства.
Робот-манипулятор с концевыми эффекторами на присосках
Электрические захваты
Электрические захваты имеют пальцы, приводимые в действие отдельными двигателями, что позволяет надежно захватывать объекты, с которыми манипулируют, и высокий уровень контроля над скоростью и размещением.
Пневматический захват
Пневматические захваты используют для движения сжатый воздух, а не электрическую систему, что обеспечивает большее усилие захвата, чем электрические захваты.
Магнитный захват
Магнитные захваты используются для перемещения черных металлов. Магнитность сводит к минимуму риск падения и не требует электричества или воздуха.
Механический захват
Механические захваты не питаются, но имеют штыри или другие конструктивные особенности, которые позволяют им соединяться с объектами, которыми манипулируют.
Присоска
Захваты с присоской используют вакуум для захвата предметов и манипулирования ими. Они представляют собой полезный недорогой вариант, но имеют более ограниченное применение, чем другие типы концевых эффекторов.
Они представляют собой полезный недорогой вариант, но имеют более ограниченное применение, чем другие типы концевых эффекторов.
Роботы-манипуляторы чаще всего используются на промышленных предприятиях. В связи с этим возможности их использования многочисленны и разнообразны. Однако манипуляторов можно найти и за пределами производства, в таких областях, как здравоохранение.
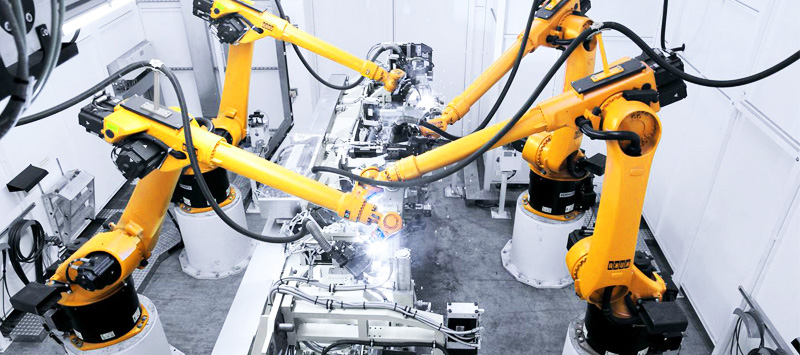
Промышленность
Роботы-манипуляторы широко используются в промышленных условиях благодаря их точности, воспроизводимости, возможностям автоматизации, способности поднимать тяжелые грузы и универсальности с точки зрения различных концевых эффекторов, которые можно использовать. Таких промышленных роботов иногда называют серийными манипуляторами.
Промышленное использование роботов-манипуляторов включает:
Сборка: когда манипулятор используется для добавления различных компонентов в сложную деталь путем прикрепления каждого компонента в правильном месте
- переместить объект из одной области в другую, например.
 с рабочего стола на поддон
с рабочего стола на поддон Упаковка: когда манипулятор используется для помещения объекта в коробку, поддон или другую форму упаковки перед, в некоторых случаях, запечатыванием упаковки
Контроль качества: манипуляторы могут использоваться для стресс-тестирования определенных деталей, например, путем их вытягивания или скручивания управляемые телеманипуляторы играют важную роль в здравоохранении
Управление роботом может помочь во многих хирургических операциях. Роботизированная хирургия может быть более точной и, следовательно, привести к лучшим результатам для пациентов, чем ручная хирургия.
В большинстве роботизированных операций используются телеманипуляторы, роботизированные манипуляторы, которые позволяют хирургу-человеку управлять рукой и концевым эффектором манипулятора, используя собственные движения рук. Другие роботизированные операции полностью контролируются компьютером, без использования телеманипулятора.

Одним из наиболее ярких примеров роботов-манипуляторов в здравоохранении является хирургическая система Да Винчи, которая используется для хирургических процедур, таких как простатэктомия, гистерэктомия и восстановление сердечного клапана. Система, управляемая с помощью консоли, имеет концевые эффекторы, которые могут функционировать как скальпели, ножницы, электрохирургические устройства или захваты. Одним из ограничений конструкции является отсутствие тактильной обратной связи для оператора.[2]
Космос
Некоторые из наиболее заметных (и дорогостоящих) применений роботов-манипуляторов можно найти в космосе, где имеется ограниченное количество людей-операторов, способных выполнять техническое обслуживание и другие потенциально опасные задачи.
Одним из примеров космического манипулятора является Canadarm. Огромный манипулятор Canadarm весом 450 кг был разработан для манипулирования полезными нагрузками на космических челноках НАСА.
 Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами.
Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами.Рекомендуем прочитать: Рука лунного вездехода расширяет функциональные возможности космических миссий
Роботизированные манипуляторы являются одними из наиболее важных устройств в современном производстве, и их использование позволяет создавать эффективные автоматизированные сборочные линии в таких областях, как автомобилестроение, судостроение и производство потребительских товаров. товары. Однако они также используются в других областях, и их использование в будущем будет только увеличиваться благодаря их точности, эффективности и способности достигать труднодоступных мест.
Важнейшей отличительной чертой манипулятора является кинематическое движение его руки, другими словами, конструкция его различных звеньев и шарниров. Тип руки во многом определяет пригодность манипулятора для решения той или иной задачи (поскольку концевые эффекторы более универсальны и взаимозаменяемы).
 Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.
Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.[1] Льюис, Ф.Л., Доусон, Д.М., Абдалла, Коннектикут. Управление роботом-манипулятором: теория и практика. КПР Пресс; 2003 12 декабря
[2] Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A. Технический обзор хирургического телеманипулятора да Винчи. Международный журнал медицинской робототехники и компьютерной хирургии. 2013 г., декабрь 9(4):396-406.
Применение смешанной реальности в программировании роботов-манипуляторов
Чтобы прочитать этот контент, выберите один из следующих вариантов:
Жоао Невеш
(Машиностроительный факультет, Коимбрский университет, Португалия)Диого Серрарио
(Кафедра машиностроения, Университет Коимбры, Португалия)J. Norberto Pires
(Кафедра машиностроения, Университет Коимбры, Португалия)Промышленный робот
 «> ISSN :
«> ISSN :
0143-991xДата публикации статьи: 3 декабря 2018 г.
Дата публикации номера: 7 декабря 2018 г.
Загрузки
Аннотация
Цель
Смешанная реальность расширяется на промышленном рынке, и несколько компаний в различных областях адаптируют этот набор технологий для различных целей, таких как оптимизация процессов, улучшение задач программирования и продвижение интерактивности своих продуктов с пользователями или даже улучшение преподавания или обучения. Робототехника — еще одна область, которая может извлечь выгоду из этих новейших технологий. На самом деле, большинство современных и будущих роботизированных приложений, а именно области, связанные с передовыми производственными задачами (например, аддитивное производство, совместная робототехника и т.
 д.), требуют новой техники для реального восприятия результата нескольких действий, включая задачи программирования, прогнозировать траектории, визуализировать движение и связанную с ним информацию, взаимодействовать с программистами и пользователями, а также ряд других человеко-машинных интерфейсов. Следовательно, эта статья призвана объяснить новую концепцию человеко-машинных интерфейсов, направленную на улучшение взаимодействия между продвинутыми пользователями и рабочими ячейками промышленных роботов.
д.), требуют новой техники для реального восприятия результата нескольких действий, включая задачи программирования, прогнозировать траектории, визуализировать движение и связанную с ним информацию, взаимодействовать с программистами и пользователями, а также ряд других человеко-машинных интерфейсов. Следовательно, эта статья призвана объяснить новую концепцию человеко-машинных интерфейсов, направленную на улучшение взаимодействия между продвинутыми пользователями и рабочими ячейками промышленных роботов.Дизайн/методология/подход
Представленная концепция использует два разных приложения (приложения), разработанных для изучения расширенных функций устройства Microsoft HoloLens. Цели проекта, описанного в этой статье, заключаются в том, чтобы оптимизировать пути роботов, просто позволяя продвинутому пользователю настраивать выбранный путь в среде смешанной реальности и создавать новые пути, просто позволяя продвинутому пользователю вставлять точки в смешанную реальность.
 среды, исправлять их по мере необходимости, связывать их с помощью определенного типа движения, параметризовать их (с точки зрения скорости, точности движения и т. д.) и задавать их контроллеру робота.
среды, исправлять их по мере необходимости, связывать их с помощью определенного типа движения, параметризовать их (с точки зрения скорости, точности движения и т. д.) и задавать их контроллеру робота.Выводы
Решения, продемонстрированные в этом документе, показывают, как можно использовать смешанную реальность, чтобы пользователи с ограниченным опытом программирования могли в полной мере использовать области робототехники. Они также ясно показывают, что интеграция технологии смешанной реальности в существующие роботизированные системы станет поворотным моментом в снижении сложности для конечных пользователей.
Ограничения/последствия исследования
В разработанных приложениях есть две проблемы. Первый относится к идентификации инструментов робота, которая очень чувствительна к условиям освещения или к очень сложным инструментам робота. Это может привести к ошибкам позиционирования, когда программное обеспечение показывает путь в сцене смешанной реальности.
 В статье представлены пути решения этой проблемы. Еще одна нерешенная проблема связана с обработкой особенностей робота при настройке или создании новых путей. Текущая работа сосредоточена на создании механизмов, которые не позволяют конечному пользователю создавать пути, содержащие недостижимые точки, или пути, которые невозможны из-за плохих параметров движения.
В статье представлены пути решения этой проблемы. Еще одна нерешенная проблема связана с обработкой особенностей робота при настройке или создании новых путей. Текущая работа сосредоточена на создании механизмов, которые не позволяют конечному пользователю создавать пути, содержащие недостижимые точки, или пути, которые невозможны из-за плохих параметров движения.Практические выводы
В этом документе демонстрируется использование устройства смешанной реальности для улучшения задач программирования и управления производственными рабочими ячейками на основе промышленных роботов [см. видео в (Pires et al. , 2018)]. Поскольку представленные устройства и роботизированные ячейки являются основой для целей Индустрии 4.0, эта демонстрация имеет обширную область применения в ближайшем будущем, положительно влияя на то, как сложные приложения, требующие тесного сотрудничества между людьми и машинами, обдумываются, планируются и построен.
 В документе представлены два разных приложения, полностью готовых к использованию в промышленных условиях. Эти приложения представляют собой научные эксперименты, призванные продемонстрировать принципы и технологии смешанной реальности применительно к промышленной робототехнике, а именно для улучшения задачи программирования.
В документе представлены два разных приложения, полностью готовых к использованию в промышленных условиях. Эти приложения представляют собой научные эксперименты, призванные продемонстрировать принципы и технологии смешанной реальности применительно к промышленной робототехнике, а именно для улучшения задачи программирования.Социальные последствия
Хотя устройство HoloLens открывает новые выдающиеся области для управления роботами и программирования, оно по-прежнему дорого и несколько тяжело для повседневного использования. Следовательно, это открывает окно возможностей для объединения этих устройств с другими мобильными устройствами, такими как планшеты и телефоны, для создания приложений, использующих преимущества их объединенных функций.
Оригинальность/ценность
В документе представлены два различных приложения, полностью готовых к использованию в промышленных условиях.
 Эти приложения представляют собой научные эксперименты, призванные продемонстрировать принципы и технологии смешанной реальности применительно к промышленной робототехнике, а именно для улучшения задачи программирования. Первое приложение связано с визуализацией пути, то есть позволяет пользователю визуализировать в среде смешанной реальности любой путь, заранее запланированный для роботизированной ячейки. С помощью этой функции опытный пользователь может отслеживать путь робота, выявлять проблемы, связывать любые трудности в конечном продукте с конкретной проблемой на пути робота, предвидеть проблемы с выполнением, которые повлияют на качество конечного продукта, и т. д. Это особенно важно для не только для расширенных приложений, но и для случаев, когда путь робота определяется пакетом САПР (в автономном режиме). Второе приложение состоит из процедуры графического управления траекторией, которая позволяет опытному пользователю создавать и оптимизировать траекторию робота. Просто изучив эту функцию, конечный пользователь может настроить любой путь, полученный с помощью любого метода программирования, используя подход смешанной реальности для управления (визуально) процедурой манипулирования путями.
Эти приложения представляют собой научные эксперименты, призванные продемонстрировать принципы и технологии смешанной реальности применительно к промышленной робототехнике, а именно для улучшения задачи программирования. Первое приложение связано с визуализацией пути, то есть позволяет пользователю визуализировать в среде смешанной реальности любой путь, заранее запланированный для роботизированной ячейки. С помощью этой функции опытный пользователь может отслеживать путь робота, выявлять проблемы, связывать любые трудности в конечном продукте с конкретной проблемой на пути робота, предвидеть проблемы с выполнением, которые повлияют на качество конечного продукта, и т. д. Это особенно важно для не только для расширенных приложений, но и для случаев, когда путь робота определяется пакетом САПР (в автономном режиме). Второе приложение состоит из процедуры графического управления траекторией, которая позволяет опытному пользователю создавать и оптимизировать траекторию робота. Просто изучив эту функцию, конечный пользователь может настроить любой путь, полученный с помощью любого метода программирования, используя подход смешанной реальности для управления (визуально) процедурой манипулирования путями.
Всего комментариев: 0