Рука манипулятор: Статья — роботизированная рука манипулятор
Содержание
Статья — роботизированная рука манипулятор
Рука манипулятор для человекоподобного робота RKP-Rh201-3D позволяет производить захват предметов по принципу пятипалой человеческой руки с дальнейшим их удержанием, перемещением в пространстве относительно любой плоскости или переносом.
Также возможно использование сжатого в кулак манипулятора RKP-Rh201-3D для динамического воздействия на внезапно возникшее впереди или сбоку препятствие или на соперника в боях роботов.
Роботом называют автоматическое устройство, имеющее манипулятор — механический аналог человеческой руки — и систему управления этим манипулятором. Обе эти составные части могут иметь различное устройство — от очень простого до чрезвычайно сложного.
Манипулятор обычно состоит из шарнирно соединенных звеньев, как рука человека состоит из костей, связанных суставами, и заканчивается охватом, который является чем-то вроде кисти человеческой руки. Роль связок в кисти манипуляторе выполняют специальные связки из нейлона. Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Вид тыльной стороны ладони человекоподобного робота RKP-Rh201-3D. В пальцах хорошо видны нейлоновые сухожилия (смотри Рис. 1).
Перемещение звеньев манипулятора обеспечивают так называемые приводы или сервомеханизмы (сокращенно серво) — аналоги мускулов в руке человека.
Обычно в качестве таковых используются сервоприводы, которые включают в себя: редуктор (систему зубчатых передач для снижения числа оборотов электродвигателя серво и для увеличения вращающего момента) и электрическую схему управления серво, регулирующую направление и скорость вращения электродвигателя.
В роботизированной руке RKP-Rh201-3D установлен один серводвигатель большой мощности для того, чтобы быстро сжимать и разжимать всю кисть робота (все пять пальцев манипулятора в виде руки). Это хорошо применимо в боевых роботах для нанесения различных ударов, но также возможна компоновка кисти руки робота, при которой каждым пальцем будет управлять отдельный сервопривод весом 9 грамм, например, рулевая машинка TowerPro 9 Gram SG90.
Вид на внутреннюю часть ладони человекоподобного робота RKP-Rh201-3D. Ладонь кисти человекоподобного робота зажата на 50%. (смотри Рис. 2).
В таком случае возможны сложные движения кисти человекоподобного робота, но программирование при этом становится более сложным, интересным и захватывающим. При этом на каждом из пальцев кисти руки человекоподобного робота возможна установка дополнительных разнообразных датчиков и сенсоров, управляющих различными процессами.
Таково в общих чертах устройство манипулятора RKP-Rh201-3D. Что касается сложности задач, которые может разрешать тот или иной робот, оборудованный различными манипуляторами, заменяющими ему руки, то они во многом зависят от сложности и совершенства управляющего устройства.
Принято говорить о трех поколениях роботов: промышленных, адаптивных и роботах с искусственным интеллектом. Но какой бы робот не проектировался ему не обойтись без рук манипуляторов для выполнения различных задач. Звенья манипулятора подвижны друг относительно друга и могут совершать вращательные и поступательные движения. Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Общий вид человекоподобного боевого робота на сервоприводах с кистями рук RKP-Rh201-3D (смотри Рис. 3).
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm / Хабр
Привет, гиктаймс!
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
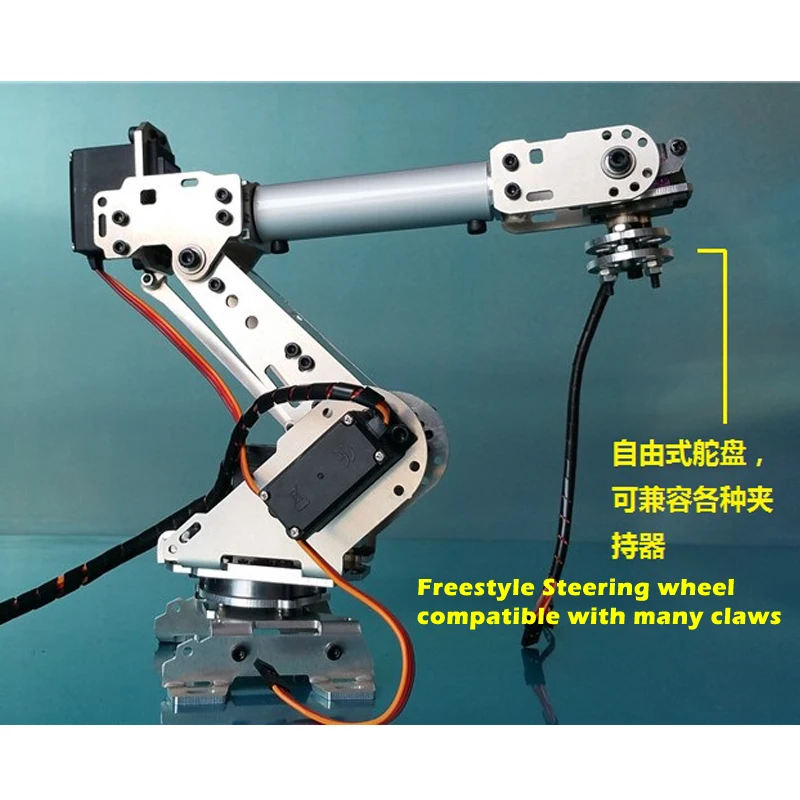
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость.
 Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
… и 3мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью.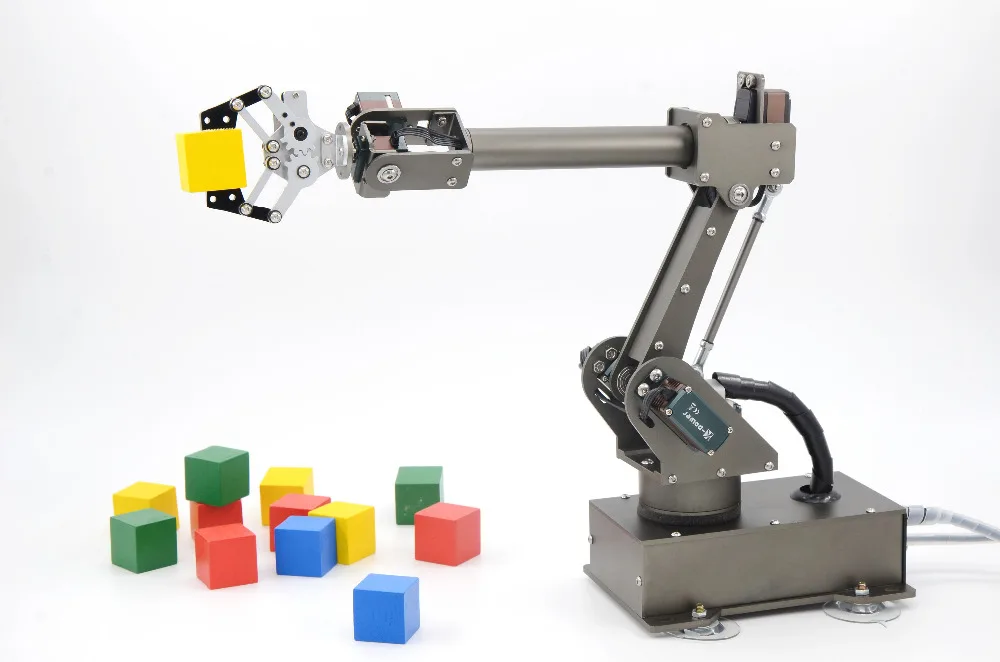 При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
BOBB — Подъемник для строительства стен из бетонных блоков
Подъемник для строительства кирпичей или блоков (BOBB) был разработан, чтобы позволить строительным компаниям снимать с оператора нагрузку по повторяющемуся подъему тяжелых бетонных блоков, повышая при этом эффективность фактического процесса возведения стен. . Если вы являетесь подрядчиком по подпорным стенам или устанавливаете (сегментные подпорные стены) блок SRW для жизни, этот продукт повысит вашу безопасность и скорость. Прекратите ломать пальцы, болеть спину и напрягать плечи. Ознакомьтесь со спецификациями ниже!
. Если вы являетесь подрядчиком по подпорным стенам или устанавливаете (сегментные подпорные стены) блок SRW для жизни, этот продукт повысит вашу безопасность и скорость. Прекратите ломать пальцы, болеть спину и напрягать плечи. Ознакомьтесь со спецификациями ниже!
Устройство установки блока SRW
Строитель стен из бетонных блоков
BOBB – Строитель подпорных стен
Преимущества и особенности BOBB
- Грузоподъемность 150 фунтов.
- Максимальный вылет руки 12 футов.
- 10-футовая рабочая зона с вертикальным перемещением.
- Индивидуальная краска для наружных работ.
- Несколько карманов для вилочных погрузчиков для регулировки под любым углом.
- Работает на газе, поэтому на стройплощадке не требуется воздух или электричество.
- Повышение производительности, так как операторы больше не будут уставать.

- Повышена точность размещения блоков.
- Снижение риска деформации спины, плеч и шеи.
- Обратные клапаны блокируют установку в случае утечки воздуха.
- Снижает риск повреждения блока при размещении, поскольку оператор сможет перемещать груз.
- изготовлены из нержавеющей стали, что позволяет захватывать широкий спектр шлакоблоков.
- Выравнивающие домкраты на базовом блоке для поддержания уровня блока.
Захватные губки
Как построить подпорную стенку с помощью BOBB
- Устройство очень простое в использовании, оно состоит из вертикального подъемника с пневматическим приводом и простого захвата. Функция подъема будет предназначена для плавания груза с помощью простых элементов управления для управления захватом и освобождением.
- Устройство полностью пневматическое с 3 плавающими настройками:
- 1-я настройка — инструмент разгружен.

- 2-я настройка — инструмент полностью загружен.
- 3-я настройка — инструмент частично загружен (это позволяет блоку чувствовать некоторый вес, чтобы лучше закрепиться в растворе).
- 1-я настройка — инструмент разгружен.
- 2-я и 3-я настройки будут регулироваться на инструменте, чтобы позволить детали плавать при загрузке, а кнопка позволит оператору перейти к 3-й настройке, когда он находится в нужном положении и хочет разместить деталь.
- Инструмент имеет пневматический привод и автоматически переключается с 1-й настройки на 2-ю настройку и наоборот при нажатии кнопки захвата/освобождения.
BOBB Дополнительные функции
- Возможна нестандартная высота мачты.
- Удлинители троса для размещения в местах, где требуется кабель длиной более 10 футов.
- — см. пример здесь Эргономичный подъемный механизм
- Доступна индивидуальная краска.
Доступен специальный концевой инструмент
Ergonomic Partners является производителем подъемного оборудования и изделий для сборки стен из бетонных блоков по всей стране, в Канаде, Мексике и особенно в штатах Миссури, Иллинойс, Индиана, Канзас, Арканзас, Миссисипи, Небраска, Теннесси, Кентукки, Айова и Оклахома. Свяжитесь с нами сегодня.
типов концевых эффекторов | Вакуумные концевые эффекторы
Механический инструмент
Механические подъемные приспособления идеально подходят для работы с аналогичными деталями. Эти манипуляторы захватывают детали и позволяют оператору безопасно и легко перемещать груз. Наши механические устройства помощи при подъеме обычно могут работать с деталями весом от 25 до 400 фунтов. В некоторых ситуациях вес деталей обеспечивает всю силу захвата, необходимую для подъема тяжелого груза. Механические подъемные механизмы могут быть очень экономичным способом справиться с вашими повседневными потребностями в подъеме грузов.
Инструменты C-образной рамы
Манипуляторы C-образной рамы идеально подходят для работы с объектами квадратной или цилиндрической формы. Эти подъемные устройства зажимают детали с помощью гидравлической или пневматической силы; и позволяют оператору добраться до обрабатывающего центра или стойки. Они идеально подходят, когда препятствие над головой не позволяет оператору расположить инструмент непосредственно над точкой установки. Наши роботизированные концевые эффекторы C-Frame обычно работают с деталями весом от 25 до 500 фунтов. При работе с тяжелыми грузами наша схема безопасности захвата не позволит оператору высвободить деталь в воздухе. Это делается интуитивно с помощью схемы на инструменте.
Вакуумные инструменты
Вакуумные подъемники идеально подходят для работы с плоскими или слегка изогнутыми непористыми деталями. Эти промышленные концевые эффекторы могут принимать самые разные формы из дверей, окон, коробок, пакетов и круглых слитков материала. Эти эргономичные подъемники доступны с регулируемыми вакуумными присосками, что позволяет оператору поднимать детали разных размеров. В процессе проектирования и утверждения заказчик может запросить различные конфигурации вакуума и функции безопасности. Эти функции включают в себя несколько вакуумных контуров, обратные клапаны на вакуумных присосках и контур сброса нагрузки. Многие из этих вакуумных манипуляторов дают операторам возможность вращать деталь в нескольких различных направлениях.
Эти эргономичные подъемники доступны с регулируемыми вакуумными присосками, что позволяет оператору поднимать детали разных размеров. В процессе проектирования и утверждения заказчик может запросить различные конфигурации вакуума и функции безопасности. Эти функции включают в себя несколько вакуумных контуров, обратные клапаны на вакуумных присосках и контур сброса нагрузки. Многие из этих вакуумных манипуляторов дают операторам возможность вращать деталь в нескольких различных направлениях.
Разжимной стержень
Разжимной стержень идеально подходит для работы с большими рулонами материала со сплошным внутренним диаметром. Мы предлагаем десятки типов оборудования для обработки стержней, от переносного или стационарного оборудования для обработки рулонов до подъемников на базе лебедки и устройств для поворота рулонов. Все наши стандартные конструкции доступны в различных конфигурациях для самых разных областей применения. Мы предлагаем индивидуальные инженерные услуги, которые дают нам возможность работать с любым приложением. Наши манипуляторы с ID-захватом могут работать с грузами до 1000 фунтов и идеально подходят для безопасного перемещения тяжелых катушек.
Мы предлагаем индивидуальные инженерные услуги, которые дают нам возможность работать с любым приложением. Наши манипуляторы с ID-захватом могут работать с грузами до 1000 фунтов и идеально подходят для безопасного перемещения тяжелых катушек.
Стандартные и боковые захваты
Стандартные захваты идеально подходят для деталей круглой и аналогичной формы весом от 20 до 400 фунтов. Эти манипуляторы позволяют захватывать и поворачивать детали в нескольких различных направлениях, что упрощает позиционирование неудобных грузов. Инструменты с боковым захватом идеальны, когда детали расположены близко друг к другу. Эти вспомогательные инструменты для подъема позволяют дотянуться за деталью или рядом с деталью, когда движется только одна сторона инструмента. Наши боковые захваты поставляются в нескольких различных вариантах, включая ручное вращение на 180 градусов, автоматический вертикальный наклон и автоматический наклон, наклон и вращение. Наш инженерно-технический персонал может разработать инструменты для индивидуального проектирования в соответствии с вашими потребностями.
Наш инженерно-технический персонал может разработать инструменты для индивидуального проектирования в соответствии с вашими потребностями.
Инструменты для магнитных захватов
Магнитные подъемные приспособления идеально подходят для стальных деталей толщиной четверть дюйма и более. Наши инженеры используют постоянные магниты и электромагниты с пневматическим приводом в зависимости от вашего применения. Эти магнитные манипуляторы могут обрабатывать грузы до 1000 фунтов. Независимо от того, поднимаете ли вы большие плоские листы стали или цилиндрические стальные трубы, вы можете использовать эти манипуляторы с магнитным приводом для многих решений по обработке стали. Наши магнитные манипуляторы имеют возможность предотвратить выброс детали в воздухе. Это искробезопасная конструкция, встроенная в воздушный контур оснастки. Если вы используете электромагнитный, мы предлагаем клиентам возможность резервного питания от батареи, чтобы предотвратить высвобождение детали в случае потери питания.
Всего комментариев: 0