Как сделать робота на ардуино: Опыт создания первого робота на Ардуино (робот-«охотник») / Хабр
Содержание
Схемы проектов arduino роботов / Ардуино роботы своими руками / Сборка роботов на микроконтроллерах
Этот раздел сайта посвящен пошаговым инструкциям с фото и видео по изучению arduino, основам использования микроконтроллеров arduino в робототехнике. Проекты с контроллером arduino uno и starter kit. Практическая энциклопедия по arduino проектам для начинающих. Схемы и примеры arduino на русском. Основы работы со скетчами arduino, описания комплекта, программируем arduino. Программирование ардуино своими руками, описание ардуино комплектов для создания роботов. Конструируем роботов на базе arduino самостоятельно. Собираем примеры сборки ардуино роботов. Скетчи и проекты для arduino проектов для начинающих новичков и специалистов:
Подборки:
Сделай робота из StarWars
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданию
Возможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под…
В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под…
DIY: Реалистичная робот-рыба из пвх трубы под Arduino. Пошаговая инструкция по созданию
В этой инструкции показано подробно, как сделать своими руками робота-рыбу из обычной водопроводной трубы, который сможет плавать в воде и даже использоваться в промышленных целях. Для его создания понадобиться не так уже много материалов и времени…
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Популярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию ин. ..
..
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданию
Это руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобств…
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданию
Если вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движения. ..
..
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданию
Sneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности. Sneel является биомиметическим, мобильным, водным роботом с открытым исходным кодом. Электромех…
DIY: Arduino управляемый робот для игры в пинг-понг. Пошаговая инструкция по созданию
Эта пусковая установка для пинг-понга управляется от Arduino. Конструкция использует сервопривод для распределения шариков и два двигателя с колесами для скорости и ловкости толчков…
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданию
Пошаговая инструкция по созданию
Представляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться. Возможность сохранения пу…
DIY: Робот-танк на основе Androidного смартфона. Пошаговая инструкция по созданию
Робот-танк на основе смартфона является отличным проектом для вас и ваших детей. Этот робот может быть построен в течение часа и не требует пайки или специальных инструментов. Когда вы закончите его сборку, просто скачайте и установите приложение EMGRobotics Audio Robot на вашем телефоне. При…
DIY: Робот-черепаха с гидролокатором на PICAXE или Arduino. Пошаговая инструкция по созданию
Пошаговая инструкция по созданию
Это 5-дюймовая роботизированная платформа, работающая на PICAXE или Arduino с гидролокатором на мачте. Главная функция робота – обхождение препятствий. Это хорошая платформа для движения и подъема, которая может быть применимой ко многим конфигурациям и адаптирована к нескольким целям……
DIY: Робоавтомобиль под Arduino с управлением с помощью Android устройств. Пошаговая инструкция по созданию
Это простой проект робо-автомобиля, который управляется через Bluetooth. Здесь используется контроллер Arduino. Для управления автомобилем используется Androidный гаджет со встроенным акселерометром. Чувствительность и значение наклона устанавливается в настройках приложения Android. Также пре…
DIY: FIER — четвероногий робот на основе Arduino. Пошаговая инструкция по созданию
Пошаговая инструкция по созданию
Этот интересный механизм называется FIER. Он представляет собой четвероногого робота, который сделан из деревянных деталей, проводков и программной системы Arduino. В этой инструкции мы продемонстрируем вам пошаговое построение этого робота со всеми подробностями. Это не сложно, нужно терпение…
В этом разделе вы можете найти схемы и проекты, что бы собрать своего arduino робота или робота на базе другого микрокомпьютера контроллера. Arduino для начинающих своими руками. Примеры проектов на русском с использованием arduino, основы работы со скетчами arduino при создании ардуино робота и другое о платформе arduino на этой странице. Практическая энциклопедия для конструирования роботов на котроллере arduino. Визуальное программирование микроконтроллера, как программировать и использовать arduino в робототехнике при создании мобильных роботов.
Так же здесь есть курсы, примеры и уроки по интерфейсу arduino, уроки ардуино на русском для начинающих. Уроки по программированию ардуино роботов, роботов на конструкторе арудино и других контроллерах для создания мобильных роботов для начинающих.
Уроки по программированию ардуино роботов, роботов на конструкторе арудино и других контроллерах для создания мобильных роботов для начинающих.
Подробные описания и пошаговые инструкции по конструированию роботов на базе контроллера ардуино. Фото и видео инструкции о том, как собрать своего ардуино робота из подручных материалов. Как собрать и запрограммировать арудино робота своими руками для себя или соревнований. Практическая энциклопедия, скетчи и примеры роботов на ардуино, которые вы сможете собрать в домашних условиях.
Заполните одно из полей на ваш выбор
Заполните одно из полей на ваш выбор
или
1
грн.
Оформить заказ
Добавить к заказу расходники для этого товара
Этот товар сохранится в корзине, Вы выберите необходимые для Вас расходники и аксессуары.
Продолжить покупки
Этот товар сохранится в корзине.
Если хотите связаться с нами:
Артикул товара:
(067) 103 90 70
(099) 103 90 70
(063) 103 90 70
как сделать радиоуправление своими руками
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.
По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
Файлы
- Arduino_Obstacle_Avoiding_Rover.
 ino
ino - Obstacle Avoiding Robot Arduino Code.pdf
Содержание статьи
Шаг 1: Нужные части и инструмент
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
Запчасти:
- Набор шасси 4WD для робота (GearBest)
- Arduino Nano (GearBest)
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
Необходимый инструмент :
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси
Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы
Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0. 002 x 48 = 0.096 Н•м).
002 x 48 = 0.096 Н•м).
Шаг 5: Подготавливаем клеммы моторчиков
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Описание распиновки:
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
Шаг 10: Входы / Датчики
В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Входящие сигналы могут идти от датчиков, удалённо, или со смартфона. В этом руководстве я использую смартфон в качестве девайса, отправляющего сигналы, управляющие роботом.
Шаг 11: Источник питания
Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
Шаг 12: Установка компонентов
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Соединение моторов:
Out1 -> красный провод левостороннего мотора (+ )
Out2 -> черный провод левостороннего мотора ( — )
Out3 -> красный провод правостороннего мотора ( + )
Out4 -> черный провод правостороннего мотора ( — )
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Она очень пригождается во время написания кода.
Шаг 15: Софт
Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
Файлы
- Basic_Robt.ino
- Smartphone Controlled Arduino Robot Code.pdf
Шаг 16: Тестирование
Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее
В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.
WALTER — The Arduino Photovore Insect
Components and supplies
| × | 1 | |||||
| × | 3 | |||||
| × | 4 | |||||
| × | 4 | |||||
| × | 5 | |||||
| × | 1 |
 1A)
1A)Necessary tools and machines
| |||
|
Приложения и онлайн-сервисы
|
About this project
[Please excuse my English]
I really like the popular set-up of 2 сервоприводы arduino насекомых на ютубе. Когда я смотрю на него, я всегда вспоминаю, что сделали роботы BEAM задолго до того, как эта установка стала любимой. Эти люди, которые являются фанатиками аналоговых роботов, лучше справились с походкой из-за лучшего угла между двумя двигателями (9).0201 microcore/bicore walker и т.д.).
Эти люди, которые являются фанатиками аналоговых роботов, лучше справились с походкой из-за лучшего угла между двумя двигателями (9).0201 microcore/bicore walker и т.д.).
Однако, на мой взгляд, ни один из упомянутых выше не выглядит более живым, чем VBug1.5 (он же Walkman), созданный основателем лучевой робототехники Марком Тилденом. Он использует 5 двигателей, поэтому у него больше маневренности.
Сделать простого робота BEAM несложно, но создание чего-то столь сложного, как VBug1.5, может вызвать затруднения у новичка в области электроники вроде меня. Итак, когда я решил сделать что-то вроде жуков Тилдена, мне пришлось остановиться на платформе Arduino, самом простом выборе для не-инженеров (или, как ни странно, в моем случае, для тех, кто хочет стать инженером).
В итоге я сделал Walter , четырехногого робота на ардуино с 5 сервоприводами. Вы можете задаться вопросом, если я хотел сделать робота-жука, который выглядит живым, то почему я вместо этого не использовал 8 или 12 сервоприводов. Что ж, я подумал о чем-нибудь простейшем, что я могу сделать, чтобы добиться максимальной маневренности. Я говорю об использовании большого количества клея вместо изготовления рамок.
Что ж, я подумал о чем-нибудь простейшем, что я могу сделать, чтобы добиться максимальной маневренности. Я говорю об использовании большого количества клея вместо изготовления рамок.
ПОВЕДЕНИЕ
Как и многие другие роботы Arduino, Уолтер может избегать препятствий с помощью ультразвуковых датчиков HC-SR04. Чтобы добавить характеру жука, Уолтер еще и фотофаг, значит, его привлекает свет. Фотодиоды используются для обнаружения света. В скетче Arduino генерируются случайные значения, чтобы Уолтер сам решал, когда он хочет остановиться, чтобы отдохнуть, а также случайным образом менял скорость своей походки (3 скорости).
Когда я начинал, я планировал разместить сенсорные кнопки под каждой ногой Уолтера, чтобы у него были датчики поверхности. А вот аккумулятор (портативный блок питания для смартфона) сильно обходится сервоприводам. Я знаю, что сенсорные кнопки почти ничего не весят, чтобы не беспокоиться о весе, но по иронии судьбы вес робота недостаточен, чтобы нажимать перевернутые кнопки.
Я планировал сделать Walter версии 2 с большими сервоприводами, а затем включить эти кнопки в качестве датчиков поверхности.
Подробнее
Код
Схема
Уолтер. Наборы и проекты для начала работы
Хотите узнать, как собрать робота Arduino? В этом руководстве показаны наборы и проекты, которые помогут вам легко приступить к их созданию!
В прошлом сборка роботов была дорогостоящей и сложной задачей из-за необходимости большого количества деталей и опыта. Однако с появлением Arduino и комплектов, рук и деталей, которые идут вместе с ним, робототехника стала веселым и захватывающим процессом, который очень доступен!
Что нужно для сборки робота Arduino?
Первый шаг к созданию чего-либо — какие компоненты необходимы? Сборка робота Arduino не является исключением: количество необходимых деталей зависит от того, какой тип робота вы пытаетесь построить, а также от вашего бюджета!
ref
Вот список компонентов, которые обычно потребуются для сборки базового робота Arduino:
- Плата Arduino; Arduino Uno/Arduino 101
- Драйвер двигателя: промежуточное устройство между Arduino, аккумулятором и двигателями.
 Обеспечивает ток для правильной работы всех компонентов
Обеспечивает ток для правильной работы всех компонентов - Двигатели для вращения колес и позволяют роботу двигаться
- Ультразвуковой датчик расстояния: для обнаружения роботом приближения объекта
- USB-кабель: для загрузки программного обеспечения и использования в качестве источника питания
- Модули подключения; Ведомые устройства Bluetooth для роботов Arduino и т. д., которые действуют как контроллер
- Транспортный комплект/роботизированная платформа: корпус робота для монтажа деталей.
Как уже упоминалось, приведенный выше список — это лишь минимальные требования для создания простейшего робота Arduino. Тем не менее, существует множество различных деталей, применимых для сборки роботов Arduino!
Чтобы помочь вам расширить свой творческий потенциал и упростить процесс покупки всех деталей по отдельности, мы подготовили наборы роботов Arduino, которые включают в себя все основные компоненты/модули, которые вам понадобятся для начала работы!
Наборы роботов Arduino
Набор роботов Arduino Для начинающих: Стартовый комплект роботов (версия IR)
Собранный робот из стартового комплекта роботов
Компания Seeed предлагает набор роботов, который поможет вам легко начать сборку. робот Ардуино!
робот Ардуино!
- Содержит механические детали и электронные модули, обычно встречающиеся в мире роботов, этот набор может быть использован в качестве робота-танка или трехколесного робота-автомобиля, как показано выше!
- Он также подходит для начинающих, так как не требует пайки и простой проводки. С этим стартовым набором вы быстро соберете робота!
Всего 40 деталей. Полный список деталей с указанием количества вы можете найти на нашей странице продукта!
Набор роботов Arduino Line Follower: AlphaBot Basic Robot Building Kit for Arduino
Еще одним набором роботов Arduino, подходящим для начинающих, является описанный выше базовый набор для сборки роботов Alphabot. Этот комплект работает на роботизированной платформе Alphabot, способной не только следовать линии Arduino, но и избегать препятствий, измерять скорость и управлять ИК-портом!
С этим комплектом вам не придется беспокоиться о том, что у вас нет платы Arduino, поскольку он поставляется с UNO plus, улучшенной альтернативой микроконтроллеру Arduino Uno R3!
Этот комплект робота Arduino включает следующее:
- Удлинитель Arduino, поддерживает защиту робота Arduino
- Модульная конструкция с модулями plug-and-play, устраняющая необходимость в подключении беспорядочных перемычек и пайке!
- Драйвер двигателя LM298P со схемой диодной защиты для дополнительной безопасности
- LM2596 постоянное напряжение, обеспечивающее стабильное питание 5 В для вашего Arduino
На микроконтроллере…
- Функции UNO plus делают его в целом лучшим решением благодаря преимуществам во многих областях, имеющих решающее значение для облегчения процесса сборки роботов Arduino!
- Такие функции включают поддержку двух уровней напряжения и боковую кнопку для совместимости с роботизированным щитом, переключатель загрузчика и многое другое!
Для полного сравнения функций UNO plus, UNO r3 и базового комплекта для сборки роботов Alphabot вы можете перейти на нашу страницу продукта!
Нужна альтернативная версия с защитным экраном и двухрежимным Bluetooth? Вы можете проверить это!
Версия 2 Alphabot: набор для сборки роботов AlphaBot2 для Arduino
AlphaBot2
Как то, что вы видели в предыдущей рекомендации Alphabot и подумали, что это она? Эта обновленная версия выводит сборку роботов Arduino на новый уровень!
AlphaBot2 имеет двухслойную структуру; нижнее базовое шасси и верхняя плата адаптера. Разрабатывая его таким образом, он обеспечивает лучшую стабильность и совместимость в целом!
Разрабатывая его таким образом, он обеспечивает лучшую стабильность и совместимость в целом!
О, и по сравнению с другими наборами для сборки роботов, Alphabot2 не требует пайки и проводки!
Конструкция AlphaBot2; Шасси с нижней базой:
- Стабильное отслеживание линии с 5-канальным инфракрасным датчиком, аналоговый выход в сочетании с алгоритмом PID Меньший нагрев TB6612FNG Драйвер двигателя с двойным Н-образным мостом, встроенный вместо L298P, использовавшегося в предыдущей версии
- N20, с металлическими шестернями, обеспечивающими низкий уровень шума и высокую точность
- Onboard RGD LED
Микроредуктор
AlphaBot2 upper adapter board features:
- Onboard Arduino interface for easy integration with Arduino controller
- 0.96inch 128×64 yellow/blue dual color OLED
- TLC1543 AD acquisition chip
- PC8574 Расширитель ввода-вывода, чтобы избежать нехватки ввода-вывода
- Разъем Xbee, для подключения двухрежимного модуля Bluetooth
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
- Страница продукта
- Узнайте больше об Alphabot2 с демонстрационными кодами Arduino
Проекты роботов Arduino
Хотите глубже изучить бесконечный творческий потенциал при создании проекта робота Arduino? Этот раздел сегодняшнего блога именно тот, который вы ищете!
Я покажу сообществу 10 самых интересных проектов роботов Arduino! Не стесняйтесь черпать из него вдохновение!
1. Робот-паук Arduino
Робот-паук Arduino
Несомненно, одним из самых крутых роботов Arduino, которые вы можете сделать сегодня, является робот Arduino Spider. Благодаря MEGA DAS на hackster.io вы можете легко создать его уже сегодня!
Что вам нужно, чтобы сделать робота-паука Arduino?
Аппаратные компоненты:
- Arduino Nano R3
- Универсальный модуль Bluetooth с низким энергопотреблением (BLE)
- Расширение Onion Corporation OLED
- RGB Diffuse Common Cathode
- Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством MEGA DAS на hackster.io!
2. Робот Arduino PoliArdo; создан с помощью Zumo Robot
Хотите построить робота-победителя, который успешно прошел лабиринт в соревновании? Этот проект поможет вам в этом!
Какова формула победы?
- Три ультразвуковых датчика для наблюдения за стенами
- Датчик цвета, который считает линии и распознает цвета
- Динамики, подающие сигнал роботу при пересечении линий разных участков
- Дисплей, показывающий количество линий
Вот полный список компонентов, которые вам понадобятся:
Аппаратные компоненты:
- 2 Arduino UNO и Genuino Uno
- 2 Ультразвуковые датчики
- Zumo Arduino
- Датчик цвета
- Двигатель постоянного тока (универсальный)
Приложения и онлайн-сервисы
- Arduino IDE
Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством от MakerRobotics на Hackster.
 io!
io!3. Робот-марсоход Arduino
В Интернете есть множество вездеходов Arduino, но с этим проектом вездехода Arduino собрать все компоненты вместе намного проще!
Благодаря интеграции системы Grove вы можете просто добавлять датчики и исполнительные механизмы по принципу plug and play, устраняя необходимость в макетной плате!
Что вам нужно?
Hardware components:
- Arduino 101 & Genuino 101
- Skeleton Bot – 4WD Mobile Robotic Platform
- Seeed Grove Starter Kit for Arduino
- Seeed Grove I2C Motor Driver Board
Software apps and online services :
- Arduino IDE
- Nordic Semiconductor BLE Toolbox
Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством от shadydave на Seeed Project Hub!
4. Arduino Sumo Robot
Происходя от термина сумо в Японии, соревнования роботов сумо стали обычным явлением в наши дни, когда два робота помещаются в кольцо и пытаются вытолкнуть друг друга!
Итак, хотите ли вы создать робота, достаточно конкурентоспособного и способного противостоять боям сумо? Вот проект сумо-робота Arduino, который поможет вам начать работу над созданием робота для этого нокаута!
Что вам нужно?
Аппаратные компоненты:
- Arduino Nano R3
- 2 DC Motor, 12V
- Dual H-Bridge Motor Drivers L298
- Ultrasonic Sensor
- 9V battery (generic)
- 9V battery clip
Software apps and online services:
- Arduino IDE
Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством AhmedAzouz на hackster.
 io!
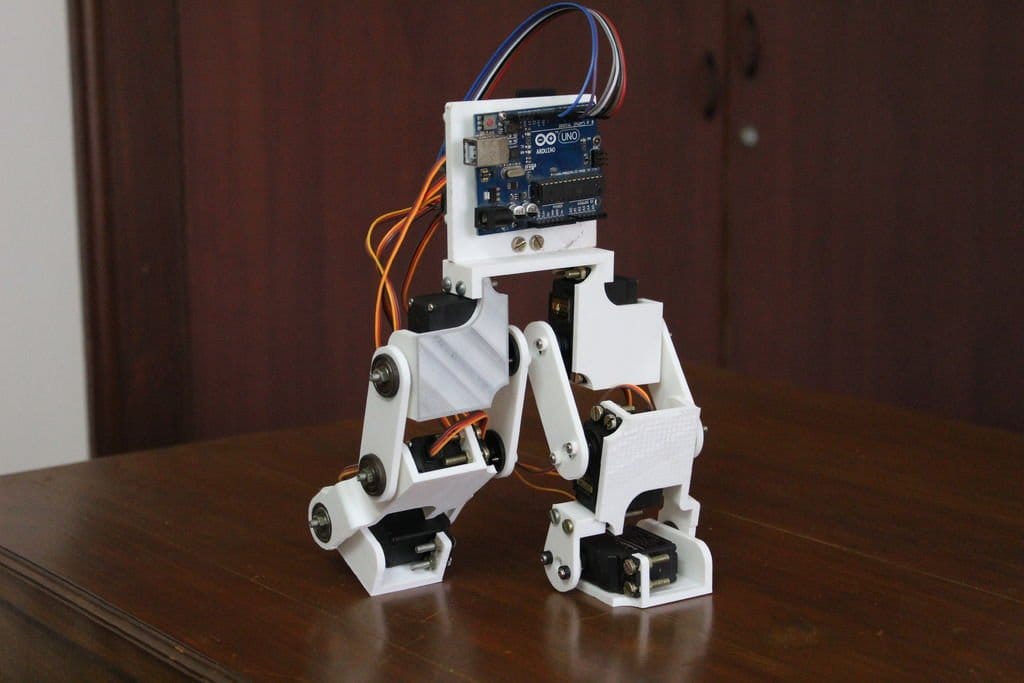
io!5. Робот-гуманоид Arduino
Первое, что приходит на ум, когда кого-то спрашивают, как выглядит робот, это роботы, похожие на людей. Эти человекоподобные роботы также известны как роботы-гуманоиды.
Этот проект поможет вам построить робота-гуманоида, которым вы сможете управлять с помощью Андриода. Его можно использовать на пересеченной местности, а также есть функция обнаружения падения!
Что вам нужно?
Аппаратные компоненты:
- ssc-32u-usb-servo-controller
- Модуль Bluetooth с низким энергопотреблением (BLE) (общий)
- Seeed Grove — 3-осевой цифровой компас V2
- Arduino Nano R3
- Устройство Andriod
- Сервопривод Id-2015
Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Аджита Валаппила на Seeed Project Hub!
6. Самобалансирующийся робот Arduino
Далее, робот, который балансирует сам по себе? Да, вы не так читаете или видите.
 Вы действительно можете построить самобалансирующегося робота Arduino, который передвигается на двух колесах!
Вы действительно можете построить самобалансирующегося робота Arduino, который передвигается на двух колесах!Кажется, круто? Вот что вам понадобится:
Компоненты оборудования:
- Arduino Nano R3
- 2 9V Батарея (универсальный)
Distership Disters and Fabraition Machines:
Distership Disters and Fabraition Machines: . железо Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Стефана Шульца на hackster.io! 7. Робот Hexapod Arduino Hexapod Mohawk от UWcharlie1983 Хотите сверхдешевый гексапод Arduino, пригодный для 3D-печати и управляемый через Bluetooth? Vorpal The Hexapod — это проект, который вы можете легко превратить в то, что вы хотите! Мало того, этот гексапод оснащен системой крепления, позволяющей создавать собственные 3D-печатные украшения и игровые приспособления! Что вам нужно? Аппаратные компоненты: Ручные инструменты и станки: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Team Vorpal Robotics на Hackster. 8. Робот Arduino Delta Если вы ищете продвинутого и мощного робота, этот проект для вас! Роботы Delta известны своими функциями захвата и сборки, способными двигаться с высокой скоростью и выполнять повторяющиеся задачи быстро и последовательно. С помощью этого проекта вы можете построить дельта-робота Arduino, который можно подключить к Raspberry Pi, чтобы играть в крестики-нолики! Что вам понадобится: Аппаратные компоненты: Программные приложения и онлайн-сервисы: Ручные инструменты и станки: Несмотря на исчерпывающий список деталей, если вы любите строить, это то, что вам нужно! Хотите узнать больше? Вы можете посмотреть полное руководство от geordag на Hackster. 9. Робот-уборщик Arduino с Roomba Вы когда-нибудь пробовали автоматическую уборку с помощью роботов-уборщиков? Если вы когда-нибудь пробовали, скорее всего, вы используете робота Roomba. Если это так, то этот проект для вас! Этот проект направлен на подключение Arduino к Roomba через последовательный порт для развертывания команд! Что вам нужно? Аппаратные компоненты: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством MJRoBot на Hackster.io! 10. Робот для рисования на Arduino Не умеет рисовать и хотел бы запрограммировать робота для рисования на Arduino? Этот последний проект — тот, который вы ищете! На основе DrawingBot от MakerC имеется 5 новых файлов 3D/STL, которые можно использовать для повышения стабильности ползунка для головы, включая наклон пера. io!
io! io!
io!
Всего комментариев: 0