Kuka роботы: Робот KUKA. Промышленные роботы KUKA. Робот КУКА. Робот манипулятор KUKA. Цена робота KUKA. Купить робот KUKA.
Содержание
Промышленные роботы KUKA: специальные разновидности
Мир промышленных роботов KUKA гибок и многогранен. Неслучайно они так легко адаптируются для работы с различной продукцией и настраиваются под широкий спектр задач.
Наряду с универсальными промышленными роботами инженеры KUKA разработали несколько специализированных серий манипуляторов, которые предназначены для определенных условий производств или наилучшего выполнения определенной работы. Роботы специализированных конструкций выпускаются в разных классах грузоподъемности.
Сварочные роботы серии ARC и ARC HW
Сварочные роботы KUKA обеспечивают высокоточную сварку дуговым методом на производственных линиях и в сварочных секциях. Данный тип оборудования для сварки имеет грузоподъемность до 5 и до 16 кг и радиус действия 1,5 – 2 метра.
При наличии 6 осей это позволяет легко и быстро дотягиваться до всех точек сварки даже на деталях и изделиях со сложной геометрией и большой площадью. При этом они чрезвычайно компактны, не имеют выступающих контуров, а небольшой вес позволить разместить их на производстве без дополнительного укрепления фундамента.
Для сварочных роботов KUKA доступны:
— дуговая сварка,
— точечная сварка и пайка,
— сварка в среде защитных газов.
Особенного внимания заслуживают роботы для сварки в среде защитных газов (ARC HW). Они обладают уникальной конструкцией с пропускным отверстием в 58 мм. Этого вполне достаточно, чтобы дополнительные шланги для подачи газа размещались внутри тела робота, не выгибались, не перекручивались и были надежно защищены от повреждений.
Роботы для литейного производства (F)
Литейное производство требует специального оборудования, которое способно четко и надежно и гибко работать в условиях высоких температур цеха. Промышленные роботы Kuka серии F разработаны специально для манипуляций с горячими и хрупкими изделиями в сложных температурных условиях. Их использование позволяет исключить выполнение людьми вредной для здоровья работы, повысить качество и производительность.
Роботы для литейного производства выпускаются во всех классах грузоподъемности (от малой до сверхтяжелой). Самая мощная модель KR 1000 L750 TITAN F выдерживает нагрузки до 1000 кг и имеет радиус действия до 3,6 метров. В любом классе изделия Kuka отличаются компактностью, гибкостью, неизменной точностью и надежностью.
Самая мощная модель KR 1000 L750 TITAN F выдерживает нагрузки до 1000 кг и имеет радиус действия до 3,6 метров. В любом классе изделия Kuka отличаются компактностью, гибкостью, неизменной точностью и надежностью.
Данный тип может успешно применяться:
- В металлургической промышленности;
- В стекольной промышленности;
- В судостроении;
- В автопромышленности;
- В машиностроении и в других областях, где используется высокотемпературное производство.
Роботы паллетоукладчики (PA)
Паллетоукладка – процесс актуальный практически для любого производства, связанного с выпуском готовой продукции, состоящей из однотипных единиц. Укладка продукции на паллеты, а также снятие изделий с паллет – задачи, с которыми легко справляются специальные модели Kuka PA.
В каталоге производителя паллетоукладчики представлены в широком диапазоне грузоподъемности (от 40 до 130 кг) и радиуса действия (от 2 до 3,6 м), а значит, вы можете подобрать их под условия конкретной продукции.
Особые преимущества:
- Идеальный баланс собственного веса и грузоподъемности: не перегружает производственную площадку.
- Компактные размеры. Роботы отличаются специальной узкой конструкцией и не имеют выпирающих деталей, поэтому готовы работать даже в стесненных условиях.
- Невероятно высокая скорость работы: например KR 180 R3200 PA при грузоподъемности до 180 кг способен производить до 27 циклов укладки в минуту, а KR 700 PA при грузоподъемности в 700 кг выполняет до 15 циклов в минуту.
- Гибкая настройка. Конструкция позволяет крепить различные виды грузозахватов и отгружать изделия как вертикальными, так и горизонтальными рядами.
Процесс, скорость и качество укладки наглядно продемонстрирует следующее видео:
Обратите внимание! Специальная разновидность паллетоукладчика KR QUANTEC PA arctic предназначена для работы в условиях низких температур (от -30°С до +5°С). С его помощью можно организовать паллетирование непосредственно в морозильной камере на предприятиях пищевой промышленности.
С его помощью можно организовать паллетирование непосредственно в морозильной камере на предприятиях пищевой промышленности.
Роботы Kuka для стерильных помещений (CR)
Высокотехнологичные производства, связанные с электроникой, научным оборудованием и т.п. нередко осуществляются в помещениях с высоким уровнем стерильности. Роботы Kuka в модификации для стерильных помещений избавят вас от необходимости приобретать специализированные решения по невероятно высокой цене.
Все возможности универсальных промышленных роботов разных классов грузоподъемности теперь доступны и в данном сегменте. Роботы для стерильных помещений покрыты специальной белой эмалью с отшлифованной поверхностью, на которую не оседают частицы. Предотвратить образование частиц в результате истирания при работе помогают специальные уплотнители.
Роботы высокой точности (HA)
Точность – неизменная черта всех роботизированных комплексов Kuka. Однако при работе с лазерными технологиями данный показатель требует особого совершенства. Высокоточные роботы Kuka сохраняют стабильность посторяемости ±0,05 мм даже в классе большой грузоподъемности (до 120 кг).
Высокоточные роботы Kuka сохраняют стабильность посторяемости ±0,05 мм даже в классе большой грузоподъемности (до 120 кг).
Это делает их эффективными инструментами производства, которое ведется с применением лазерных технологий. Также они подойдут для выполнения измерений при проверке параметров выпускаемой продукции.
Консольные роботы
Роботы консольной модификации предназначены для установки в качестве элемента оборудования или станка. Их можно закреплять на машинах литья под давлением, инструментальных станках и т.п.
Kuka выпускает два модельных ряда консольных роботов: K и KS. KS выступает более современной модификацией и обеспечивает при компактных размерах большую глубину рабочей зоны и меньшую продолжительность такта.
Межпрессовые системы (PRESS)
Данная разновидность роботов Kuka отличается увеличенным радиусом действия, поэтому их можно задействовать на загрузке и разгрузке крупных деталей, которые используются при производстве прессов.
Специализированные роботы Kuka – оборудование с параметрами, которые в полной мере отвечают конкретным условиям.
Компактные промышленные роботы Kuka – быстрота и точность нового уровня
Серия промышленных роботов-манипуляторов KR AGILUS представляет новое поколения компактной робототехники от немецкого производителя Kuka. Диапазон грузоподъемности до 6 и до 10 кг, малый вес, небольшие размеры – идеальное решение для выполнения широкого спектра промышленных операций в стесненных условиях.
Оцените главные преимущества малых роботов Кука:
- Скорость и точность, которой вы еще не знали. KR AGILUS повышают эффективность и качество производства благодаря высочайшей в своем классе скорости манипуляций. Минимальная продолжительность рабочего цикла дополняется точностью самого высокого уровня (стабильность повторяемости ± 0,03мм). Точность сохраняется даже при длительной эксплуатации благодаря надежной и долговечной конструкции робота. Следующий ролик демонстрирует скорость и точность KR AGILUS в действии:
- Встроенное электроснабжение. Чтобы обеспечить компактность, устройство промышленного робота включает встроенную систему элекстроснабжения. Она состоит из шины EtherCAT/EtherNet, трех клапанов для подачи сжатого воздуха, а также 6 входов и 2 выходов.
- 6 рабочих осей. В серии представлены модели, способные успешно выполнять операции на 6 рабочих осях.
- Бессменная смазка. Роботы KR AGILUS могут работать в условиях непрерывного производства без замены смазки двигателей и редукторов.
- Компактность размещения. Манипуляторы можно закрепить в любом монтажном положении: на полу, на потолке, на стене. Все оси роботов KR AGILUS снабжены тормозами, поэтому можно быть уверенным в их эффективной работе при любом размещении.
- Рабочая зона до 1100 метров.
 При небольших размерах промышленные манипуляторы Kuka имеют оптимальных радиус действия. В зависимости от модели он может составлять 700, 900 или 1100 мм.
При небольших размерах промышленные манипуляторы Kuka имеют оптимальных радиус действия. В зависимости от модели он может составлять 700, 900 или 1100 мм. - Компактная установка дополнительного оборудования. Ячейки дополнительных модулей и устройств не повлияют на компактность и эффективность робота. Для их подсоединения можно использовать специальные точки на самом манипуляторе, его кисти, на карусели или балансире.
- Уникальная функция Safe robots. Внедрение данной системы позволяет человеку безопасно работать в непосредственном контакте с роботом без механической системы контроля.
Области применения промышленных роботов KR AGILUS
— погрузочно-разгрузочные работы и другие виды манипулирования;
— комплектование и упаковка;
— операции на металлолитейных производствах;
— металлообработка и обработка поверхностей;
— обработка пластмасс и дерева;
— сборка, скрепление, разборка деталей и узлов;
— дополнение к металлорежущим станкам;
— обслуживание станков;
— установка и вставка;
— паллетирование;
— работа с прессовым и формовочным оборудованием.
Основные модификации малых промышленных роботов Kuka
Kuka Robotics выпускает компактные промышленные манипуляторы в трех основных модификациях:
1. С 5 рабочими осями.
Модели: KR 6 R700 fivve, KR 6 R900 fivve, KR 10 R1100 fivve.
5 осей позволяют выполнять манипуляции на высокой скорости, а гарантированная надежность каждой детали робота обеспечит эффективность вашего производства.
2. С 6 рабочими осями
Модели: KR 6 R700 sixx, KR 6 R900 sixx, KR 10 R900 sixx, KR 10 R1100 sixx
Работа на 6 осях с возможностью подсоединения оси 7 и 8 увеличивают показатели скорости и дают больше возможностей для оптимизации в сравнении с линейкой fivve.
3. С 6 рабочими осями и водонепроницаемым оснащением
Модели: KR 6 R700 sixx WP, KR 6 R900 sixx WP, KR 10 R900 sixx WP, KR 10 R1100 sixx WP
Если производство выполняется в условиях интенсивного взаимодействия с окружающей средой, модели промышленных роботов WP – то, что вам нужно.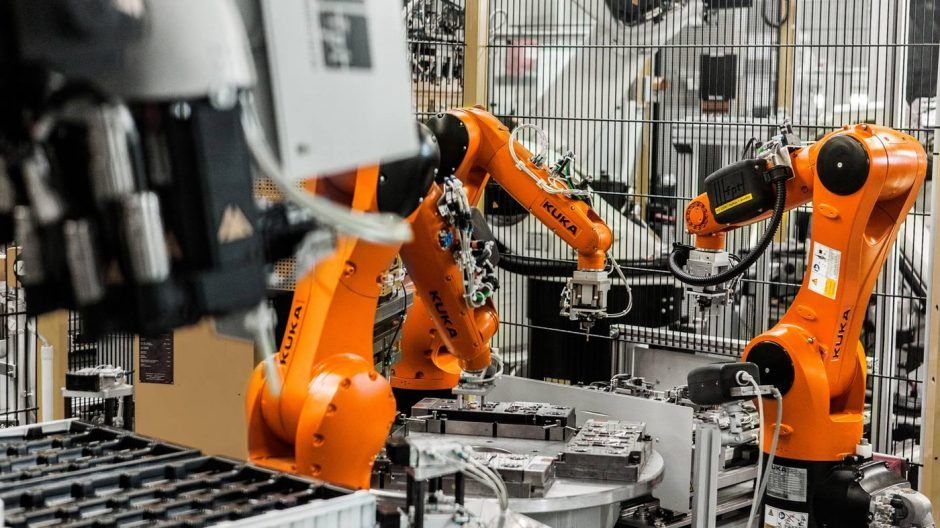 Панели выполнены из стали высокого качества, все поверхности защищены устойчивыми долговечными покрытиями. Внутренняя оснастка имеет дополнительные уплотнения. Манипуляторы WP можно интегрировать в работу инструментальных фрейзерных станков.
Панели выполнены из стали высокого качества, все поверхности защищены устойчивыми долговечными покрытиями. Внутренняя оснастка имеет дополнительные уплотнения. Манипуляторы WP можно интегрировать в работу инструментальных фрейзерных станков.
Система управления промышленными роботами Kuka
Малые роботы Kuka, как и более мощные представители робототехники данной марки управляются при помощи системы KR C4, а также более совершенной ее вариации — KR C4 COMPACT. Удобный и интуитивно понятный пользовательский интерфейс управления манипулятором робота обеспечивается сенсорным планшетом smartPAD. Отточенное взаимодействие всей системы позволяет выполнять самые разнообразные задачи.
KR C4 COMPACT – это:
— минимальные размеры интеллектуального модуля (помещается в распределительный шкаф 19«) с сокращением аппаратных компонентов, штекеров и кабелей, на смену которым пришли новейшие программные решения;
— высокое качество исполнения конструкции с «умной» вентиляцией, которая практически не требует обслуживания даже при интенсивной эксплуатации;
— управление всеми параметрами роботов (в том числе, безопасностью и логикой движений), а также дополнительными осями и оснасткой, подключенной к модулю из одной точки;
— успешная коммуникация с другими системами управления: KR C4 COMPACT работает на основе собственного программного языка (KRL), а также понимает G-код систем ЧПУ, язык систем ПЛК и успешно интегрируется с общими системами управления предприятий, такими как Siemens и Rockwell;
— энергоэффективность за счет минимального потребления электричества в режиме ожидания;
— предохранительное оснащение включено в стандартную комплектацию.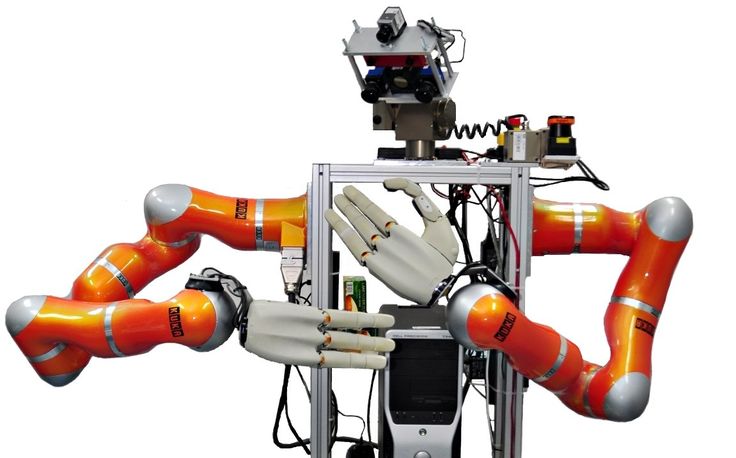
Таким образом обеспечивается удобная и недорогая интеграция системы в производство с минимальными затратами на уход и обслуживание. Все конструкционные и программные решения отличаются гибкостью и останутся актуальными даже в долгосрочной перспективе.
Мы разрабатываем проекты на основе промышленных роботов KUKA по автоматизации любых производственных процессов — сварка, фрезеровка, резка, покраска, сборка, паллетирование и пр.
Маленькие роботы учатся быстро водить машину в реальном мире
Роботы, не имеющие жизненного опыта, который можно было бы развивать, как люди (и воспринимать это как должное), которые хотят освоить новый навык, часто вынуждены начинать с нуля. Обучение с подкреплением — это метод, который позволяет роботам осваивать новые навыки путем проб и ошибок, но, особенно в случае изучения политик контроля на основе сквозного видения, это занимает много времени, потому что реальный мир — это странное трение. заполненный препятствиями беспорядок, который роботы не могут понять без зачастую непрактичного количества усилий.
Робототехники из Калифорнийского университета в Беркли значительно ускорили этот процесс, применяя тот же метод мошенничества, что и люди: вместо того, чтобы начинать с нуля, вы начинаете с некоторого предыдущего опыта, который поможет вам двигаться вперед. Используя «базовую модель», которая была предварительно обучена на роботах, управляющих самими собой, исследователи смогли получить небольшой роботизированный раллийный автомобиль, который научился бы мчаться по закрытым и открытым трассам, сравнявшись с человеческими способностями всего через 20 минут. упражняться.
Этот первый этап предварительной подготовки проводится на досуге, когда вы вручную управляете роботом (это не обязательно робот, который будет выполнять интересующую вас задачу) в различных средах. Цель этого состоит не в том, чтобы научить робота быстро ездить по трассе, а в том, чтобы научить его основам не натыкаться на вещи.
С этой предварительно обученной «базовой моделью», когда вы затем переходите к маленькому роботизированному раллийному автомобилю, вам больше не нужно начинать с нуля. Вместо этого вы можете бросить его на курс, который вы хотите, чтобы он выучил, проехать на нем один раз медленно, чтобы показать, куда вы хотите, а затем позволить ему работать полностью автономно, тренируя себя водить все быстрее и быстрее. С помощью фронтальной камеры с низким разрешением и некоторой базовой оценки состояния робот пытается достичь следующей контрольной точки на трассе как можно быстрее, что приводит к некоторым интересным эмерджентным действиям:
Вместо этого вы можете бросить его на курс, который вы хотите, чтобы он выучил, проехать на нем один раз медленно, чтобы показать, куда вы хотите, а затем позволить ему работать полностью автономно, тренируя себя водить все быстрее и быстрее. С помощью фронтальной камеры с низким разрешением и некоторой базовой оценки состояния робот пытается достичь следующей контрольной точки на трассе как можно быстрее, что приводит к некоторым интересным эмерджентным действиям:
Система изучает концепцию «гоночной трассы», находит плавный путь на круге и увеличивает скорость на крутых поворотах и шиканах. Робот учится поддерживать свою скорость в апексе, затем резко тормозит перед поворотом и ускоряется на выходе из поворота, чтобы минимизировать продолжительность движения. С поверхностью с низким коэффициентом трения полис учится немного переруливать при повороте, дрейфуя в повороте, чтобы добиться быстрого поворота без торможения во время поворота. На открытом воздухе изученная политика также способна различать характеристики грунта, отдавая предпочтение гладким участкам с высоким сцеплением на бетонных дорожках и вокруг них, а не участкам с высокой травой, которая препятствует движению робота.

Еще один умный момент — это функция сброса, которая необходима в реальном обучении. При обучении в симуляции очень легко сбросить неисправного робота, но вне симуляции сбой может (по определению) закончить обучение, если робот каким-то образом застрянет. Это не имеет большого значения, если вы хотите проводить все свое время, присматривая за роботом, пока он учится, но если у вас есть чем заняться, робот должен иметь возможность обучаться автономно от начала до конца. В этом случае, если робот не продвинулся хотя бы на 0,5 метра за предыдущие три секунды, он знает, что застрял, и выполнит простое поведение: случайным образом повернется, задним ходом, а затем снова попытается двигаться вперед, что в конце концов он отклеился.
Во время экспериментов в помещении и на открытом воздухе робот смог научиться агрессивному вождению, сравнимому с человеком-экспертом, всего за 20 минут автономной практики, что, по словам исследователей, «обеспечивает убедительную проверку того, что глубокое обучение с подкреплением действительно может быть жизнеспособным инструментом для обучения реальным». -мировые политики даже из необработанных изображений, в сочетании с соответствующей предварительной подготовкой и реализованной в контексте автономной структуры обучения». Потребуется гораздо больше работы, чтобы безопасно реализовать подобные вещи на большей платформе, но эта маленькая машина делает первые несколько кругов в правильном направлении так быстро, как только может.
-мировые политики даже из необработанных изображений, в сочетании с соответствующей предварительной подготовкой и реализованной в контексте автономной структуры обучения». Потребуется гораздо больше работы, чтобы безопасно реализовать подобные вещи на большей платформе, но эта маленькая машина делает первые несколько кругов в правильном направлении так быстро, как только может.
FastRLAP: система для обучения высокоскоростному вождению с помощью глубокой обратной связи и автономной практики Кайла Стаховича, Арджуна Бхоркара, Друва Шаха, Ильи Кострикова и Сергея Левина из Калифорнийского университета в Беркли доступна на arXiv.
Очень ловкая рука робота может работать в th
image: Используя осязание, рука робота может манипулировать в темноте или в сложных условиях освещения.
посмотреть еще
Авторы и права: Колумбийский университет ROAM Lab
Нью-Йорк, штат Нью-Йорк — 27 апреля 2023 г. — Подумайте о том, что вы делаете руками, когда дома ночью нажимаете кнопки на пульте дистанционного управления телевизора или в ресторане, используя всевозможные столовые приборы и стеклянную посуду. Все эти навыки основаны на прикосновениях, когда вы смотрите телепередачу или выбираете что-то в меню. Наши руки и пальцы — невероятно искусные механизмы, к тому же очень чувствительные.
— Подумайте о том, что вы делаете руками, когда дома ночью нажимаете кнопки на пульте дистанционного управления телевизора или в ресторане, используя всевозможные столовые приборы и стеклянную посуду. Все эти навыки основаны на прикосновениях, когда вы смотрите телепередачу или выбираете что-то в меню. Наши руки и пальцы — невероятно искусные механизмы, к тому же очень чувствительные.
Исследователи робототехники уже давно пытаются создать «настоящую» ловкость в руках роботов, но цель была разочаровывающе неуловимой. Роботизированные захваты и присоски могут брать и размещать предметы, но более ловкие задачи, такие как сборка, вставка, переориентация, упаковка и т. д., остаются в сфере человеческих манипуляций. Однако благодаря достижениям как в сенсорных технологиях, так и в методах машинного обучения для обработки сенсорных данных область роботизированных манипуляций меняется очень быстро.
ВИДЕО: https://youtu.be/mYlc_OWgkyI
Очень ловкая рука робота работает даже в темноте с алгоритмами моторного обучения для достижения высокого уровня ловкости.
В качестве демонстрации мастерства команда выбрала сложную манипулятивную задачу: выполнить сколь угодно большое вращение захваченного в руке объекта неровной формы, всегда удерживая объект в устойчивом, надежном удержании. Это очень сложная задача, потому что она требует постоянного изменения положения части пальцев, в то время как другие пальцы должны удерживать объект в стабильном состоянии. Рука не только могла выполнять эту задачу, но и делала это без какой-либо визуальной обратной связи, основываясь исключительно на осязании.
В дополнение к новым уровням ловкости рука работала без каких-либо внешних камер, поэтому она невосприимчива к освещению, окклюзии и подобным проблемам. И тот факт, что рука не полагается на зрение для манипулирования объектами, означает, что она может делать это в очень сложных условиях освещения, которые могут запутать алгоритмы, основанные на зрении, — она может работать даже в темноте.
«Хотя наша демонстрация была задачей проверки концепции, призванной проиллюстрировать возможности руки, мы считаем, что этот уровень ловкости откроет совершенно новые приложения для роботизированных манипуляций в реальном мире», — сказал Матей Чиокарли , доцент кафедры Машиностроение и Информатика .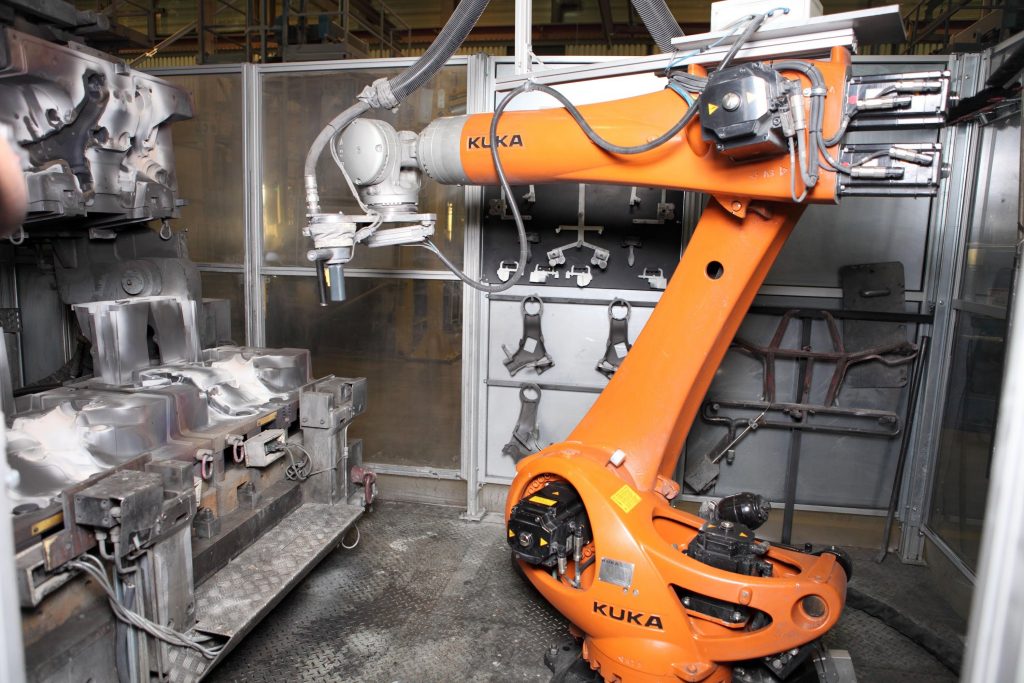 «Некоторые из наиболее непосредственных применений могут быть связаны с логистикой и погрузочно-разгрузочными работами, помогая облегчить проблемы с цепочками поставок, подобные тем, которые преследовали нашу экономику в последние годы, а также в передовом производстве и сборке на заводах».
«Некоторые из наиболее непосредственных применений могут быть связаны с логистикой и погрузочно-разгрузочными работами, помогая облегчить проблемы с цепочками поставок, подобные тем, которые преследовали нашу экономику в последние годы, а также в передовом производстве и сборке на заводах».
Использование тактильных пальцев на основе оптики
В более ранней работе группа Чокарли сотрудничала с Иоаннисом Кимиссисом, профессором электротехники, для разработки нового поколения Тактильные пальцы робота на основе оптики . Это были первые пальцы роботов, которые достигли локализации контакта с точностью до миллиметра, обеспечивая при этом полное покрытие сложной многокриволинейной поверхности. Кроме того, компактная упаковка и небольшое количество проводов в пальцах позволяют легко интегрировать их в полноценные руки робота.
Обучение руки выполнению сложных задач
Для этой новой работы под руководством научного сотрудника Ciocarlie Гагана Кхандате исследователи разработали и построили роботизированную руку с пятью пальцами и 15 независимо активируемыми суставами — каждый палец был оснащен сенсорная технология команды. Следующим шагом была проверка способности тактильной руки выполнять сложные манипуляционные задачи. Для этого они использовали новые методы моторного обучения или способность робота изучать новые физические задачи на практике. В частности, они использовали метод, называемый глубоким обучением с подкреплением, дополненный новыми алгоритмами, которые они разработали для эффективного изучения возможных двигательных стратегий.
Следующим шагом была проверка способности тактильной руки выполнять сложные манипуляционные задачи. Для этого они использовали новые методы моторного обучения или способность робота изучать новые физические задачи на практике. В частности, они использовали метод, называемый глубоким обучением с подкреплением, дополненный новыми алгоритмами, которые они разработали для эффективного изучения возможных двигательных стратегий.
Робот завершил примерно один год практики всего за несколько часов в режиме реального времени
Входные данные для алгоритмов моторного обучения состояли исключительно из тактильных и проприоцептивных данных команды, без какого-либо зрения. Используя симуляцию в качестве тренировочной площадки, робот завершил примерно один год практики всего за несколько часов в режиме реального времени благодаря современным физическим симуляторам и высокопараллельным процессорам. Затем исследователи перенесли этот навык манипулирования, отработанный в симуляции, на настоящую руку робота, которая смогла достичь того уровня ловкости, на который надеялась команда. Чокарли отметил, что «направленной целью в этой области остается вспомогательная робототехника в доме, окончательный испытательный полигон для настоящей ловкости. В этом исследовании мы показали, что руки робота также могут быть очень ловкими, основываясь только на осязании. Как только мы добавим визуальную обратную связь вместе с прикосновением, мы надеемся, что сможем достичь еще большей ловкости и однажды приблизимся к воспроизведению человеческой руки».
Чокарли отметил, что «направленной целью в этой области остается вспомогательная робототехника в доме, окончательный испытательный полигон для настоящей ловкости. В этом исследовании мы показали, что руки робота также могут быть очень ловкими, основываясь только на осязании. Как только мы добавим визуальную обратную связь вместе с прикосновением, мы надеемся, что сможем достичь еще большей ловкости и однажды приблизимся к воспроизведению человеческой руки».
Конечная цель: объединение абстрактного разума с воплощенным разумом
В конечном счете, как заметил Чокарли, физический робот, полезный в реальном мире, нуждается как в абстрактном, семантическом разуме (чтобы концептуально понять, как устроен мир), так и в воплощенном разуме (чтобы понять, как устроен мир). умение физически взаимодействовать с миром). Большие языковые модели, такие как GPT-4 от OpenAI или PALM от Google, призваны обеспечить первое, в то время как ловкость в манипулировании, достигнутая в этом исследовании, представляет собой дополнительные достижения во втором.
Например, когда ChatGPT спросят, как приготовить сэндвич, он напечатает в ответ пошаговый план, но для того, чтобы взять этот план и приготовить сэндвич, требуется ловкий робот. Точно так же исследователи надеются, что физически подготовленные роботы смогут извлекать семантический интеллект из чисто виртуального мира Интернета и эффективно использовать его в реальных физических задачах, возможно, даже в наших домах.
Статья принята к публикации на предстоящем Robotics: Science and Systems Conference (Тэгу, Корея, 10–14 июля 2023 г.), и в настоящее время доступен в виде препринта .
Об исследовании
Конференция: Robotics: Science and Systems Conference (Тэгу, Корея, 10–14 июля 2023 г.) Исследование для обучения с подкреплением ловкости Манипуляции».
Все авторы из Columbia Engineering: Гаган Хандате и Тристан Лука Саиди (информатика), Сики Шанг, Эрик Чанг, Джонсон Адамс и Матей Чиокарли (машиностроение).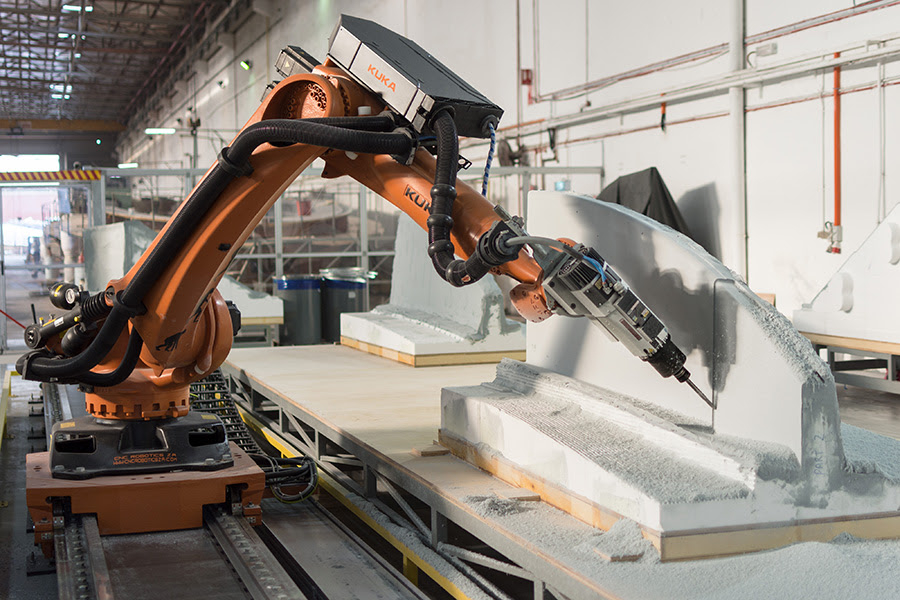
Всего комментариев: 0