P id расшифровка: Что означает PID? -определения PID
Содержание
Что означает PID? -определения PID
Начало › 3 Письма › PID
Вы ищете значения PID? На следующем изображении вы можете увидеть основные определения PID. При желании вы также можете загрузить файл изображения для печати или поделиться им со своим другом через Facebook, Twitter, Pinterest, Google и т. Д. Чтобы увидеть все значения PID, пожалуйста, прокрутите вниз. Полный список определений приведен в таблице ниже в алфавитном порядке.
Основные значения PID
На следующем изображении представлены наиболее часто используемые значения PID. Вы можете записать файл изображения в формате PNG для автономного использования или отправить его своим друзьям по электронной почте.Если вы являетесь веб-мастером некоммерческого веб-сайта, пожалуйста, не стесняйтесь публиковать изображение определений PID на вашем веб-сайте.
Все определения PID
Как упомянуто выше, вы увидите все значения PID в следующей таблице. Пожалуйста, знайте, что все определения перечислены в алфавитном порядке.Вы можете щелкнуть ссылки справа, чтобы увидеть подробную информацию о каждом определении, включая определения на английском и вашем местном языке.
Пожалуйста, знайте, что все определения перечислены в алфавитном порядке.Вы можете щелкнуть ссылки справа, чтобы увидеть подробную информацию о каждом определении, включая определения на английском и вашем местном языке.
| Акроним | Определение |
|---|---|
| PID | Paul мертв |
| PID | Photoionization детектор |
| PID | Болезнь первичного иммунодефицита |
| PID | В прошлом директор международного |
| PID | Воспалительные заболевания тазовых органов |
| PID | Выпадение межпозвоночного диска |
| PID | Главный идеал домен |
| PID | Данные изображения протистов |
| PID | Демократическая партия Институционно |
| PID | Детектор ионизации фото |
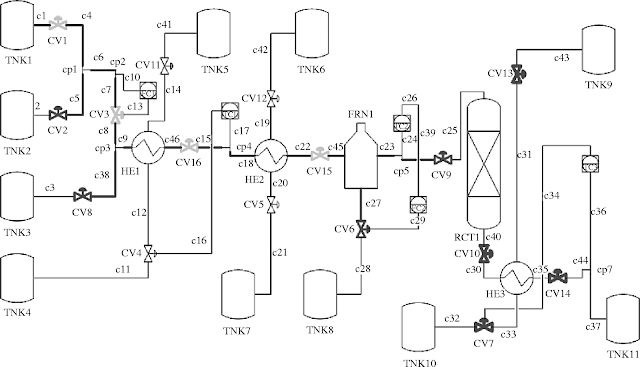
| PID | Диаграмма процесса инструмента |
| PID | Документ, удостоверяющий личность проекта |
| PID | Завод и приборостроение рисунок |
| PID | Идентификатор данных протоколов |
| PID | Идентификатор пакета |
| PID | Идентификатор пароля |
| PID | Идентификатор пациента |
| PID | Идентификатор плана |
| PID | Идентификатор программы |
| PID | Идентификатор процесса |
| PID | Идентификация параметров |
| PID | Идентификация помещений |
| PID | Идентификация посылок |
| PID | Идентификация продукта |
| PID | Идентификация проекта |
| PID | Идентификация родителей |
| PID | Идентификация частиц |
| PID | Информационный документ проекта |
| PID | Личная идентификация |
| PID | Нассау, Багамские острова — Остров Парадайз |
| PID | Начало документа закупки |
| PID | Обнаружение иона прекурсоров |
| PID | Общественности район |
| PID | Описание закупок идентификацию |
| PID | Описание элемента |
| PID | Описания предмета закупки |
| PID | Основной элемент развития |
| PID | Основным устройством ввода |
| PID | Отдел технологических отраслей промышленности |
| PID | Отличие пропорциональной интегратор |
| PID | Отображение информации о пассажирских |
| PID | Отображение общественной информации |
| PID | Пациент-данные |
| PID | Персонала увеличить номер |
| PID | Персональные данные |
| PID | План идентификации |
| PID | План идентификации обозначение |
| PID | План идентификационный номер |
| PID | Планируется визуализации данных |
| PID | Плановое промышленное развитие |
| PID | Положительной идентификации |
| PID | Портативный проверки устройства |
| PID | Предполетный вставленных данных |
| PID | Пресс-служба информации |
| PID | Прибор программируемый прерываний |
| PID | Программа внедрения документа |
| PID | Программа интеграции управления |
| PID | Программа осуществления директивы |
| PID | Программируемый интерфейс устройства |
| PID | Программы реализации документа |
| PID | Проект базы данных |
| PID | Проект запуска документа |
| PID | Пропорционально интеграл производная |
| PID | Пропорциональное, интеграл, дифференциал |
| PID | Пропорциональное, интеграл, производная |
| PID | Протокол идентификации |
| PID | Процесс & схема инструментария |
| PID | Процесс идентификации |
| PID | Процесс идентификации документа |
| PID | Процесс идентификационный номер |
| PID | Путь взаимодействия базы данных |
| PID | Рай в беде |
| PID | Раскрытие конфиденциальной информации |
| PID | Трубопроводы & схема инструментария |
| PID | Управления пропорционального интеграл производная |
| PID | Частичное первоначальное решение |
| PID | Яды информационная база данных |
Просто о PID-регулировании
#Dataforth
В записную книжку инженера
Принцип PID-регулирования используется в автоматическом управлении процессами повсеместно. Большинство современных промышленных контроллеров имеют встроенный механизм, реализующий PID-управление. Но для успешного применения этого мощного средства необходимо чётко понимать механизм его действия. Эта статья в популярной форме представляет начальные сведения о PID-регулировании.
Большинство современных промышленных контроллеров имеют встроенный механизм, реализующий PID-управление. Но для успешного применения этого мощного средства необходимо чётко понимать механизм его действия. Эта статья в популярной форме представляет начальные сведения о PID-регулировании.
3929
В ЗАКЛАДКИ
Статья
в электронной версии
«СТА» №4 / 2019 стр. 92
Статья в PDF
3 МБ
А знаете ли вы, что…
В 1939 году приборостроительная компания Taylor представила новую версию своего пневматического контроллера Fulscope с функцией предварительного действия в дополнение к ранее доступным режимам пропорционального управления и сброса. В настоящее время три режима управления называются пропорциональным, интегральным (сброс) и дифференциальным (предварительное действие), следовательно, сокращённо PID. В отечественной литературе принята аббревиатура ПИД, означающая пропорционально-интегрально-дифференциальный режим. В том же году компания Foxboro Instrument добавила к ранее доступным в контроллере Stabilog режимам пропорциональности и сброса гиперсброс, что делает его вторым ПИД-регулятором на рынке. Сегодня все ПИД‑регуляторы, в том числе и в системе Dataforth MAQ®20, основаны на тех самых пропорциональном, интегральном и производном (дифференциальном) режимах контроллеров, выпущенных в 1939 году (рис. 1).
В том же году компания Foxboro Instrument добавила к ранее доступным в контроллере Stabilog режимам пропорциональности и сброса гиперсброс, что делает его вторым ПИД-регулятором на рынке. Сегодня все ПИД‑регуляторы, в том числе и в системе Dataforth MAQ®20, основаны на тех самых пропорциональном, интегральном и производном (дифференциальном) режимах контроллеров, выпущенных в 1939 году (рис. 1).
ПИД‑регуляторы используются в большинстве приложений автоматического управления процессами в промышленности. Они могут регулировать расход, температуру, давление, уровень и многие другие параметры производственных процессов. В статье рассматривается конструкция ПИД‑регуляторов и объясняются используемые в них режимы управления P, I и D.
Ручное управление
В отсутствие автоматических контроллеров все задачи регулирования приходится выполнять вручную. Например, для поддержания постоянной температуры воды, подогреваемой промышленным газовым нагревателем, оператор должен следить за датчиком температуры и соответствующим образом регулировать подачу газа при помощи клапана (рис. 2).
2).
Если температура воды по какой-либо причине становится слишком высокой, оператор должен немного закрыть газовый клапан на величину, достаточную, чтобы температура вернулась к желаемому значению. Если вода становится слишком холодной, он должен приоткрыть газовый клапан.
Контроль и обратная связь
Процесс управления, реализуемый оператором, называется управлением с обратной связью, поскольку оператор изменяет силу пламени на основе обратной связи, которую он получает от процесса через датчик температуры. Управление с обратной связью может быть выполнено вручную, но обычно это происходит автоматически, как будет объяснено в следующем разделе. Клапан, процесс горения и датчик температуры образуют контур управления. Любое изменение, вносимое оператором в состояние газового клапана, влияет на температуру, значение которой становится доступно оператору, тем самым контур управления замыкается.
Автоматическое управление
Чтобы избавить оператора от утомительной задачи ручного управления, функцию управления можно автоматизировать с помощью ПИД‑регулятора. Для этого требуется следующее: Установить электронное устройство измерения температуры. Автоматизировать клапан, добавив к нему исполнительный механизм (и, возможно, позиционер), чтобы клапаном можно было управлять электронным способом. Установить контроллер, например, ПИДрегулятор MAQ®‑20, и подключить к нему устройство измерения температуры и автоматизированный клапан управления. Более подробная информация о PID-регуляторе Dataforth MAQ®20 представлена во врезке.
Для этого требуется следующее: Установить электронное устройство измерения температуры. Автоматизировать клапан, добавив к нему исполнительный механизм (и, возможно, позиционер), чтобы клапаном можно было управлять электронным способом. Установить контроллер, например, ПИДрегулятор MAQ®‑20, и подключить к нему устройство измерения температуры и автоматизированный клапан управления. Более подробная информация о PID-регуляторе Dataforth MAQ®20 представлена во врезке.
ПИД‑регулятор имеет уставку (SP — Set Point), чтобы оператор мог задать значение температуры. Выходной сигнал контроллера (CO — Controller Output) устанавливает положение регулирующего клапана. А значение измеренной температуры, называемое параметром регулирования процесса (или переменной процесса, PV — Process Variable), даёт контроллеру столь необходимую обратную связь. Переменная процесса и выходной сигнал контроллера передаются в цифровой форме или посредством сигналов тока, напряжения (рис.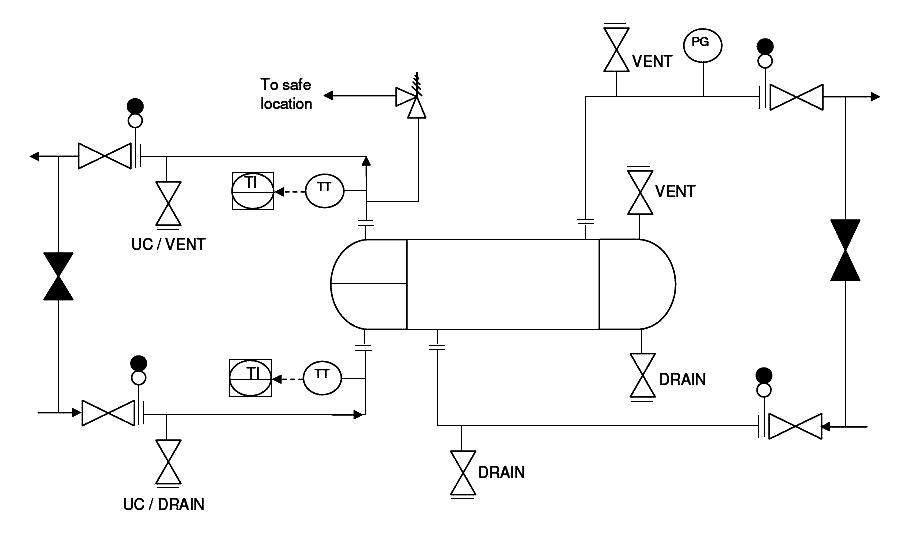 3).
3).
Когда всё включено и работает, ПИД‑регулятор получает сигнал переменной процесса, сравнивает его с уставкой и вычисляет разницу между двумя сигналами, также называемую ошибкой (E — Error). Затем на основании величины ошибки и констант настройки ПИД-регулятора контроллер рассчитывает соответствующий выходной сигнал, который устанавливает регулирующий клапан в правильное положение для поддержания температуры на заданном уровне. Если температура поднимется выше заданного значения, контроллер уменьшит степень открытия клапана, и наоборот.
ПИД-контроль
ПИД-регуляторы имеют три режима управления: пропорциональный, интегральный и дифференциальный. Каждый из трёх режимов по-своему реагирует на возникновение ошибки. Размер и характер отклика, создаваемого каждым режимом управления, регулируется путём изменения соответствующих настроек контроллера.
Режим пропорционального управления
Главной движущей силой в контроллере является режим пропорционального управления.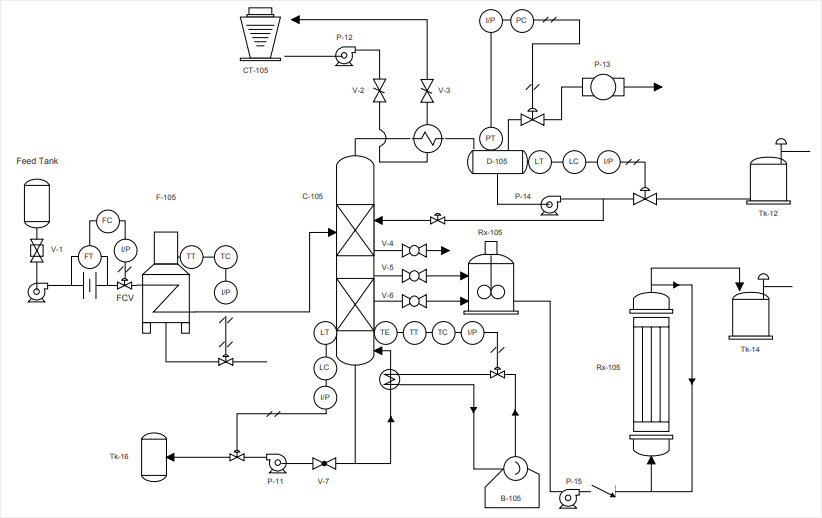 Он изменяет сигнал на выходе контроллера пропорционально ошибке (рис. 4).
Он изменяет сигнал на выходе контроллера пропорционально ошибке (рис. 4).
Если ошибка увеличивается, управляющее действие увеличивается пропорционально ей. Это очень полезно, так как для исправления бо́льших ошибок требуется более интенсивное действие. Регулируемая настройка для пропорционального управления называется усилением контроллера (Kc — Controller Gain). Более высокое усиление увеличит пропорциональное управляющее воздействие для данной ошибки. Если усиление регулятора установлено слишком высоким, контур управления начнёт колебаться и станет нестабильным. Если усиление регулятора установлено слишком низким, контроллер не будет адекватно реагировать на изменения параметра регулирования или уставки.
В большинстве контроллеров изменение усиления влияет на величину отклика в интегральном и дифференциальном режимах управления. Вот почему этот параметр называется усилением контроллера. Однако существует одна конструкция контроллера (называемая алгоритмом параллельного, или независимого усиления), в которой регулировка пропорционального усиления не влияет на другие режимы.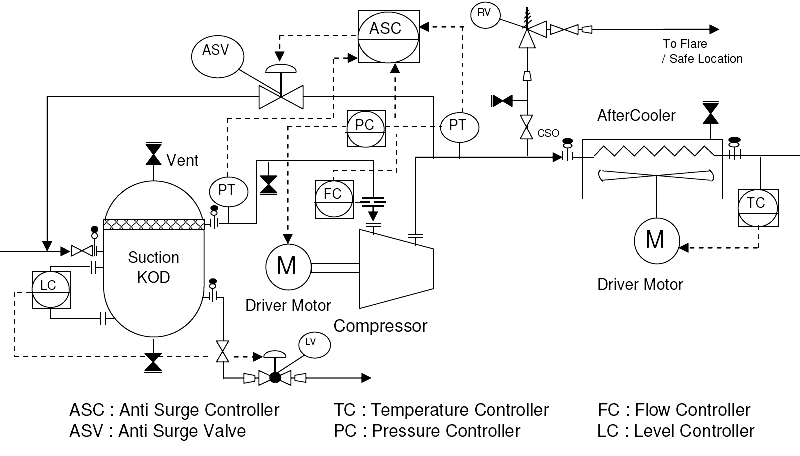
Пропорциональный контроллер
Отключив интегральный и дифференциальный режимы, ПИД-регулятор можно настроить так, чтобы он производил только пропорциональное действие. Пропорциональные контроллеры просты для понимания и настройки. Выходной сигнал контроллера — это просто ошибка управления, умноженная на усиление контроллера, плюс смещение (рис. 5).
Смещение необходимо, чтобы контроллер мог поддерживать ненулевой выходной сигнал при нулевой ошибке (переменная процесса в заданном значении). Использование пропорционального управления имеет большой недостаток — отклонение. Отклонение — это постоянная ошибка, которая не может быть устранена одним только пропорциональным управлением. Давайте рассмотрим контроль уровня воды в баке на рис. 6 с помощью пропорционального контроллера.
Пока расход воды из бака остаётся постоянным, уровень будет находиться на заданном значении. Но если оператор увеличит расход из резервуара, уровень воды начнёт уменьшаться из-за дисбаланса между притоком и оттоком.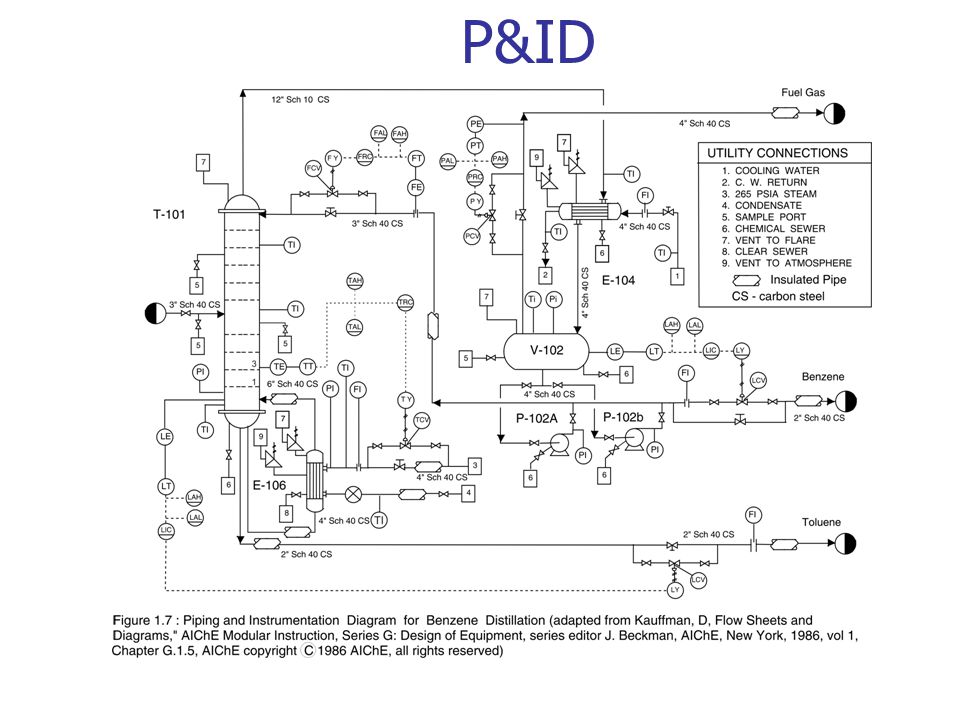 При снижении уровня воды в баке ошибка растёт и пропорциональный контроллер увеличивает выходной сигнал пропорционально этой ошибке. Следовательно, клапан, управляющий потоком в бак, открывается шире и в бак поступает больше воды. Если уровень всё равно продолжает падать, ошибка увеличивается ещё больше и клапан продолжает открываться, пока не будет достигнута точка, в которой приток снова будет соответствовать оттоку. В этот момент уровень воды в баке (и ошибка) станет постоянным. Поскольку ошибка остаётся постоянной, наш P‑контроллер будет поддерживать постоянный выходной сигнал и регулирующий клапан будет удерживать своё положение. Система теперь снова сбалансирована, но уровень воды в баке стал ниже заданного значения. Эта оставшаяся постоянная ошибка называется отклонением. На рис. 7 показано влияние внезапного снижения давления топливного газа на работу описанного ранее промышленного нагревателя и реакция пропорционального контроллера на данную ситуацию.
При снижении уровня воды в баке ошибка растёт и пропорциональный контроллер увеличивает выходной сигнал пропорционально этой ошибке. Следовательно, клапан, управляющий потоком в бак, открывается шире и в бак поступает больше воды. Если уровень всё равно продолжает падать, ошибка увеличивается ещё больше и клапан продолжает открываться, пока не будет достигнута точка, в которой приток снова будет соответствовать оттоку. В этот момент уровень воды в баке (и ошибка) станет постоянным. Поскольку ошибка остаётся постоянной, наш P‑контроллер будет поддерживать постоянный выходной сигнал и регулирующий клапан будет удерживать своё положение. Система теперь снова сбалансирована, но уровень воды в баке стал ниже заданного значения. Эта оставшаяся постоянная ошибка называется отклонением. На рис. 7 показано влияние внезапного снижения давления топливного газа на работу описанного ранее промышленного нагревателя и реакция пропорционального контроллера на данную ситуацию.
Снижение давления топливного газа понижает интенсивность горения и соответственно мощность нагревателя. Температура воды снижается. Это создаёт ошибку, на которую отвечает контроллер. Однако обнаруживается новая точка баланса между управляющим воздействием и ошибкой и изменение температуры пропорциональным регулятором не устраняется. При пропорциональном управлении отклонение будет сохраняться до тех пор, пока оператор с целью его устранения вручную не скорректирует выходной сигнал контроллера. Тогда говорят, что оператор вручную сбрасывает контроллер.
Температура воды снижается. Это создаёт ошибку, на которую отвечает контроллер. Однако обнаруживается новая точка баланса между управляющим воздействием и ошибкой и изменение температуры пропорциональным регулятором не устраняется. При пропорциональном управлении отклонение будет сохраняться до тех пор, пока оператор с целью его устранения вручную не скорректирует выходной сигнал контроллера. Тогда говорят, что оператор вручную сбрасывает контроллер.
Интегральный режим управления
Необходимость избавиться от ручного сброса по описанному ранее сценарию привела к разработке автоматического сброса, или режима встроенного управления, как это называется сегодня. Функция режима встроенного управления заключается в увеличении или уменьшении выходного сигнала контроллера с течением времени, чтобы уменьшить имеющуюся ошибку (когда переменная процесса не находится в заданном интервале значений). При наличии достаточного времени интегральный механизм будет изменять выходной сигнал контроллера, пока ошибка не станет равной нулю. Если ошибка велика, интегральный режим будет увеличивать/уменьшать выходной сигнал контроллера с более высокой скоростью; если ошибка мала, изменения будут медленными. Для данной ошибки скорость интегрального действия задаётся интегральной настройкой времени контроллера (Ti — Integral Time). Большое значение Ti (длинное время интегрирования) приводит к медленному интегральному действию, а небольшое значение Ti (короткое время интегрирования) приводит к быстрому интегральному действию (рис. 8).
Если ошибка велика, интегральный режим будет увеличивать/уменьшать выходной сигнал контроллера с более высокой скоростью; если ошибка мала, изменения будут медленными. Для данной ошибки скорость интегрального действия задаётся интегральной настройкой времени контроллера (Ti — Integral Time). Большое значение Ti (длинное время интегрирования) приводит к медленному интегральному действию, а небольшое значение Ti (короткое время интегрирования) приводит к быстрому интегральному действию (рис. 8).
Если интервал времени интегрирования установлен слишком большим, контроллер будет реагировать медленно; если он установлен слишком коротким, контур управления будет колебаться и станет нестабильным. Большинство контроллеров, включая MAQ®20, в качестве единицы измерения для интегрального управления используют интегральное время (Ti) в минутах, но некоторые определяют его в секундах. Немногие контроллеры, обычно с параллельным алгоритмом, используют параметр «интегральное усиление» (Ki) в повторениях в минуту. Параллельный алгоритм работы также доступен в MAQ®20.
Параллельный алгоритм работы также доступен в MAQ®20.
Пропорционально-интегральный контроллер
Обычно пропорционально-интегральный контроллер называют PI‑контроллером, его выход состоит из суммы пропорциональных и интегральных управляющих воздействий (рис. 9).
На рис. 10 показано, как после возмущения интегральный режим продолжает увеличивать выходной сигнал контроллера, чтобы вернуть температуру на выходе нагревателя к заданному значению.
Если сравнить это с рис. 7, становится ясно, как интегральное управление продолжает управлять выходом контроллера до тех пор, пока смещение не будет устранено полностью.
Режим дифференциального управления
Третий режим управления в ПИД-контроллере — это режим управления по производной. Дифференциальный контроль редко используется в управлении процессами, но он часто применяется в управлении движением. Для управления процессом это не является абсолютно необходимым: дифференциальный режим очень чувствителен к инструментальному шуму и усложняет настройку методом проб и ошибок. Тем не менее, его использование может привести к тому, что определённые типы контуров управления будут реагировать немного быстрее, чем при применении только ПИ-регулирования. Температурное управление, например, является типичной задачей для ПИД-регулирования. Режим управления по производной обеспечивает сигнал, основанный на скорости изменения ошибки (рис. 11).
Для управления процессом это не является абсолютно необходимым: дифференциальный режим очень чувствителен к инструментальному шуму и усложняет настройку методом проб и ошибок. Тем не менее, его использование может привести к тому, что определённые типы контуров управления будут реагировать немного быстрее, чем при применении только ПИ-регулирования. Температурное управление, например, является типичной задачей для ПИД-регулирования. Режим управления по производной обеспечивает сигнал, основанный на скорости изменения ошибки (рис. 11).
Из-за этого дифференциальный режим изначально назывался управлением по скорости. Дифференциальный режим производит большее управляющее действие, если ошибка изменяется с большей скоростью. Если величина ошибки не меняется во времени, действие дифференциальной составляющей равно нулю. Дифференциальный режим имеет настройку, называемую Derivative Time (Td). Чем больше значение этого времени, тем больше вклад дифференциального управления.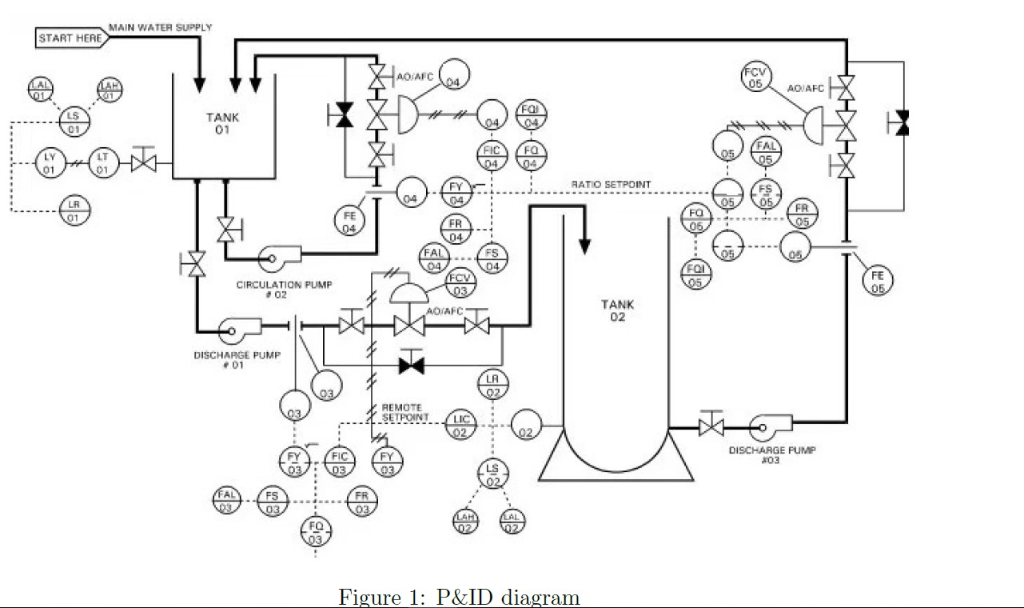 Установка времени Td на ноль полностью отключает этот режим. Если время установлено слишком большим, будут возникать колебания и контур управления станет нестабилен. Для настройки дифференциальной составляющей контроллера используются две единицы измерения: минуты и секунды.
Установка времени Td на ноль полностью отключает этот режим. Если время установлено слишком большим, будут возникать колебания и контур управления станет нестабилен. Для настройки дифференциальной составляющей контроллера используются две единицы измерения: минуты и секунды.
Пропорционально-интегрально-дифференциальный контроллер
Такой контроллер, обычно называемый ПИД-регулятором, работает на основе суммы пропорциональных, интегральных и дифференциальных управляющих воздействий.
На рис. 12 показан алгоритм неинтерактивного (также называемого идеальным) ПИД-регулятора, а на рис. 13 представлен алгоритм параллельного контроллера.
Оба они поддерживаются в системе MAQ®20. Дифференциальный режим ПИД-регулятора обеспечивает большее управляющее воздействие раньше, чем это возможно при управлении только P или PI.
Это уменьшает влияние возмущения и сокращает время, необходимое для того, чтобы уровень вернулся к своему заданному значению (рис.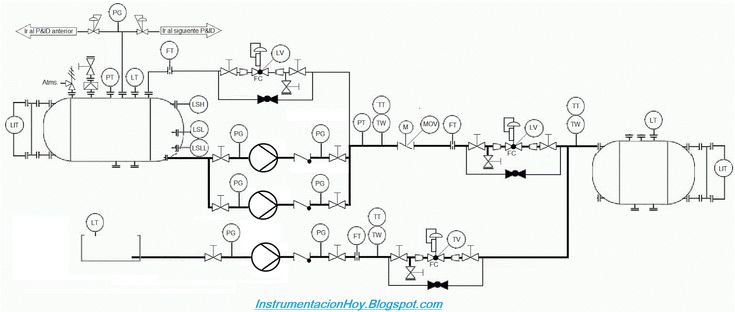 14).
14).
На рис. 15 сравнивается скорость восстановления при P, PI и PID-регулировании температуры на выходе нагревателя после внезапного изменения давления топливного газа, как описано ранее.
Заключение
ПИД-регулятор является рабочей лошадкой современных систем управления процессами. Каждый из режимов пропорционального, интегрального и дифференциального управления выполняет свою уникальную функцию. Пропорциональные и интегральные режимы необходимы для большинства контуров управления, а регулирование по производной полезно только в некоторых случаях. Существуют различные алгоритмы ПИД‑регулирования, и MAQ®20 поддерживает наиболее распространённый неинтерактивный алгоритм, а также параллельный алгоритм.
Универсальность делает MAQ®20 чрезвычайно мощным устройством и адаптируемым для широкого спектра приложений управления процессами, включая:
- тестирование и измерения;
- автоматизацию производства и процессов;
- автоматизацию машин;
- военную и аэрокосмическую промышленность;
- энергетику;
- мониторинг окружающей среды;
- нефтегазовую сферу.
Линейка продуктов MAQ®20, вобравшая в себя более 25 лет опыта проектирования компании Dataforth в индустрии управления процессами, предлагает самую низкую стоимость на канал, точность ±0,035% и изоляцию 1500 В, а также обеспечивает превосходное ПИД-управление процессами.
Авторизованный перевод Юрия Широкова
E-mail: [email protected]
#Dataforth
Показать больше
Расшифровка SSL | Palo Alto Networks
Обсуждения
Нужны ответы? Зарегистрируйтесь или войдите в систему, чтобы участвовать, делиться и учиться.
| Автор | Тема | просмотров | Ответы |
|---|---|---|---|
УткаршКумар | Palo Alto User Agent ID Services Периодически сбой | 220 | 2 |
Манглай | Использование Radius Authentication Peap-MSCHAPv2 для интерфейса управления PA Ошибка: 400 | 206 | 2 |
ИндерджитСингх | Страница блока Пало-Альто не отображается | 173 | 1 |
Томми Хант |
Учитывая, что я программирую собственный https-клиент опубликовано в обсуждениях Prisma Cloud | 283 | 5 |
гренци | Профиль защиты от уязвимостей изменяет поведение APP-ID | 175 | 1 |
Присоединяйтесь
Блоги
DOTW: что такое наборы шифров?
Растущая потребность в расшифровке SSL
Подробнее о расшифровке SSL
Проверка HTTP/2
Срок действия внешнего корневого центра сертификации AddTrust истек
Посмотреть все
Артикул
Рекомендации по расшифровке SSL с помощью Prisma Access
Расшифровка SSL с помощью Prisma Access
Поддержание конфигурации в соответствии с лучшими практиками
Посмотреть все
| <голова> | |
| <мета-кодировка="utf-8"> | |
| <мета http-equiv="x-ua-совместимый" content="ie=edge"> | |
| <мета http-equiv="x-dns-prefetch-control" content="off"> | |
| <ссылка rel="manifest" href="manifest.json"> | |
| <стиль> | |
| корпус { | |
| padding-top: 54px; | |
| } | |
| @media (минимальная ширина: 992 пикселя) { | |
| корпус { | |
| padding-top: 56px; | |
| } | |
| } | |
| #параметры-переключения-шифрования { | |
| дисплей: нет; | |
| } | |
| #параметры-переключения-расшифровки { | |
| дисплей: нет; | |
| } | |
| . info { | |
| размер шрифта: 75%; | |
| } | |
| .статус { | |
| размер шрифта: 85%; | |
| дисплей: нет; | |
| } | |
| <тело> | |
| <навигация> | |
| <дел> | |
| смайлики | |
| <диапазон> | |
| <дел> | |
| <ул> | |
| Шифровать | |
| (текущий) | |
| Расшифровать | |
| <дел> | |
| <дел> | |
| <дел> | |
🔒emoji-aes: шифруйте сообщения с помощью emoji | |
emoji-aes шифрует строковые данные с помощью симметричного шифрования AES (используя | |
| <дел> | |
| <час> | |
Шифровать | |
Чтобы зашифровать, (необязательно) выберите чередование, введите сообщение, а затем ключ шифрования. Ротация (если она нестандартная) и ключ должны быть переданы получателю по защищенному каналу. | |
| <дел> | |
| <дел> | |
| <р> | |
| <тип ввода="число" мин="0" макс="64" значение="0"> | |
a = <спам>🍎 | |
Поле rotation позволяет взаимно однозначно заменять набор символов Base64 смайликами, которые нужно поворачивать. | |
| <р> | |
| <р> | |
| <тип ввода = "пароль"> | |
| <р> | |
Ошибка: | |
Зашифровано! | |
| <дел> | |
| <час> | |
Расшифровать | |
Для расшифровки выберите согласованную ротацию (если она нестандартная), введите строку emoji-aes, а затем общий ключ шифрования. | |
| <дел> | |
| <дел> | |
| <р> | |
| <тип ввода="число" мин="0" макс="64" значение="0"> | |
a = <спам>🍎 | |
Поле rotation позволяет взаимно однозначно заменять набор символов Base64 смайликами. Это поле должно соответствовать выбору шифрования. | |
| <р> | |
| <р> | |
| <тип ввода = "пароль"> | |
| <р> | |
Ошибка: | |
Расшифровано! | |
| <дел> | |
| <час> | |
Разработано Аароном Хорлером в 2017 году. | |
| |
Всего комментариев:0
[an error occurred while processing the directive]