Автоматические устройства с обратной связью: АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ | Энциклопедия Кругосвет
Содержание
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ | Энциклопедия Кругосвет
Содержание статьи
- Понятие обратной связи.
- Принцип действия и проектирование.
- Сложные системы управления.
- Адаптация, обучение и искусственный интеллект.
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ. С первых шагов цивилизации человек пытался механизировать труд. Он очень быстро нашел пути замены мускульной энергии механической; высшей точкой этого начального периода технического прогресса была промышленная революция 18 в. Новая эпоха началась, когда человек научился производить и распределять энергию. К 20 в. в передовых странах механическая энергия, получаемая от пара, текущей воды и электричества, в основном заменила энергию человека и животных. Когда стали доступны большие количества энергии, интерес общества сместился на управление такой энергией.
Следующий важный этап в развитии техники, называемый иногда второй промышленной революцией, начался в 1930-х годах. Эта революция была связана не с изобретением принципиально новых механических устройств, а скорее с реализацией некоторой идеи, а именно идеи саморегулирования (рис. 1), которая является фундаментальной характеристикой неисчислимых естественных процессов. Хотя существование саморегулирующихся процессов в природе было замечено людьми давно, только в 20 в. были сформулированы и систематически разработаны принципы автоматического регулирования. Применение этих принципов открыло новую эру в технике и промышленности.
Эта революция была связана не с изобретением принципиально новых механических устройств, а скорее с реализацией некоторой идеи, а именно идеи саморегулирования (рис. 1), которая является фундаментальной характеристикой неисчислимых естественных процессов. Хотя существование саморегулирующихся процессов в природе было замечено людьми давно, только в 20 в. были сформулированы и систематически разработаны принципы автоматического регулирования. Применение этих принципов открыло новую эру в технике и промышленности.
См. также АВТОМАТИЗАЦИЯ.
Понятие обратной связи.
Важной особенностью большинства управляемых процессов является обратная связь. Понятие обратной связи можно легко проиллюстрировать с помощью простого примера моряка, управляющего кораблем с помощью рулевого колеса (рис. 2). Штурвальный выдерживает курс судна в соответствии с заданными командами. Этот метод управления, обозначаемый термином «управление с разомкнутым контуром», страдает несколькими серьезными недостатками. Так, при изменении характеристик привода – исполнительного механизма, изменяющего положение руля, – судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.
Так, при изменении характеристик привода – исполнительного механизма, изменяющего положение руля, – судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.
Если бы рулевой постоянно следил за курсом судна по компасу, сравнивал его с заданным и вращал штурвал так, чтобы уменьшить выявленную ошибку, судно приблизительно выдерживало бы нужный курс (рис. 3). Можно заметить, что в этом случае штурвальный выполняет три основные функции – обнаруживает отклонение действительного исполнения от заданного, принимает решение о коррекции действия и реализует его с помощью штурвала. Эти действия по обнаружению и коррекции ошибки, а также по управлению показаны на рис. 3 как обратная связь от управляемой величины к управляющей. В такой системе фигурирует не только направление движения корабля, задаваемое положением штурвала, но и само положение штурвала зависит от этого направления. Взаимозависимость двух величин – положения штурвала и курса судна – определяет концепцию, называемую в инженерной среде обратной связью, а термин «автоматические системы управления» обычно относится к автоматическим системам, построенным на этой концепции; часто такие системы называются также «системами управления с обратной связью» или «системами с замкнутым контуром».
Теперь можно дать формальное определение систем с замкнутым контуром: система с замкнутым контуром есть система, в которой истинное состояние управляемой переменной (называемое «выход») непрерывно сравнивается с желаемым состоянием (называемым «вход»), и сигнал, пропорциональный разнице между этими двумя состояниями, воздействует на управляющий элемент с целью уменьшить ошибку. В этом определении ничего не говорится об энергии, требуемой для изменения выхода, или об энергии, имеющейся на входе. Как правило, на вход системы управления подается небольшая энергия, а энергия для выхода черпается из внешнего источника. Таким образом, особенностью большинства систем автоматического управления является значительное усиление мощности.
Принцип действия и проектирование.
Автоматические системы управления могут быть разделены на две основные группы: стабилизирующие и следящие. В следящих системах (сервомеханизмах) входной сигнал меняется произвольно и зачастую непрерывно, тогда как в стабилизирующих ему задается фиксированное значение, а цель управления – сохранить выход постоянным, несмотря на флуктуации нагрузки.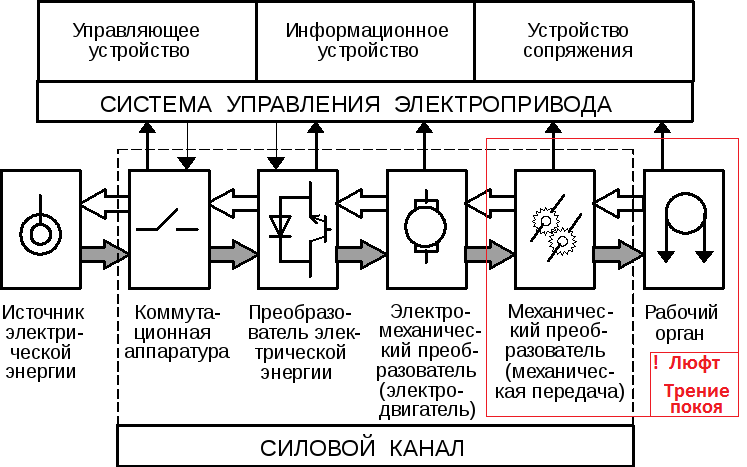 Термостат, у которого выходом является фиксированная температура, и стабилизатор напряжения, выходом которого служит нужное напряжение в сети, являются примерами стабилизирующих систем. В качестве примеров сервомеханизмов можно назвать радиолокационные и артиллерийские системы наведения и автопилоты, управляющие положением и направлением движения летательных аппаратов.
Термостат, у которого выходом является фиксированная температура, и стабилизатор напряжения, выходом которого служит нужное напряжение в сети, являются примерами стабилизирующих систем. В качестве примеров сервомеханизмов можно назвать радиолокационные и артиллерийские системы наведения и автопилоты, управляющие положением и направлением движения летательных аппаратов.
См. также СЕРВОМЕХАНИЗМ.
Автоматическая система управления не может функционировать без некоторой ошибки, потому что именно эта ошибка является источником управляющего сигнала. Задача проектировщика системы управления – сделать эту ошибку как можно меньше и тем самым увеличить чувствительность системы. Эта задача связана с определенными ограничениями, что становится ясно из следующего примера. Система управления с обратной связью, показанная на рис. 4, нужна для наведения тяжелого орудия с высокой точностью; она состоит из детектора ошибки, усилителя и серводвигателя. Ключевым элементом системы является прибор, который обнаруживает рассогласование угловых направлений цели и орудия, вырабатывая пропорциональный ему сигнал. Этот «сигнал ошибки», обычно очень малый, усиливается и прилагается в виде напряжения к одной из обмоток возбуждения электродвигателя, который развивает вращающий момент, пропорциональный указанному напряжению. Этот вращающий момент перемещает ствол орудия в направлении, приводящем к уменьшению ошибки.
Этот «сигнал ошибки», обычно очень малый, усиливается и прилагается в виде напряжения к одной из обмоток возбуждения электродвигателя, который развивает вращающий момент, пропорциональный указанному напряжению. Этот вращающий момент перемещает ствол орудия в направлении, приводящем к уменьшению ошибки.
Если направление на цель изменяется, то орудие следует за ним. Однако по инерции орудие будет проскакивать нужное положение, приводя к появлению ошибки с противоположным знаком. Это, в свою очередь, заставит серводвигатель повернуть орудие в обратном направлении. Следовательно, орудийный ствол может рыскать туда-сюда, проскакивая правильное положение. Такой режим работы системы управления называется «автоколебательным» и является принципиальным ограничением управления с обратной связью. (Например, при запаздывании сигнала обратной связи на 180° происходило бы усиление колебаний.) Поэтому главная проблема, которая встает перед проектировщиком систем управления, заключается в предотвращении неконтролируемых колебаний при одновременном сохранении высокой чувствительности системы к управляющему сигналу.
Первым очевидным решением является минимизация запаздывания сигнала обратной связи путем использования приборов с малым временем реакции. Это может улучшить устойчивость системы, но обычно не решает проблемы полностью. Кроме того, в большинстве практических ситуаций проектировщик вынужден использовать существующие элементы системы, что диктуется соображениями веса и стоимости.
Вторая и наиболее распространенная процедура – применение в контуре корректирующих звеньев (рис. 5), нейтрализующих эффект запаздывания. При отсутствии таких компенсаторов управляющий сигнал представляет собой усиленную ошибку и имеет тот же знак, что и ошибка. Если компенсатор вырабатывает составляющую сигнала, пропорциональную производной от ошибки по времени, то общий управляющий сигнал будет уменьшаться и станет отрицательным прежде, чем система «промахнется». Это воспрепятствует вхождению системы в режим автоколебаний. Такой способ компенсирующего управления называется «фазовым упреждением» или «управлением с дифференцирующей цепочкой».
Вернемся к нашему примеру об управлении курсом корабля. На любом достаточно большом корабле его реакция на поворот штурвала настолько замедленна, что, если рулевой перекладывает штурвал вправо только тогда, когда корабль явно отклоняется влево от правильного курса, это вызовет лишь увеличение амплитуды колебаний относительно курса. По этой причине рулевой должен предвидеть каждое отклонение и, чтобы уменьшить колебания, раньше перекладывать штурвал в противоположном направлении.
Другим видом компенсирующего элемента является прибор с интегрирующей цепочкой, который игнорирует малые быстро флуктуирующие сигналы ошибки и принимает во внимание только монотонную составляющую. Это уменьшает эффект обратной связи на высоких частотах, но сохраняет его силу на низких частотах. Поскольку большинство систем управления с обратной связью адекватно реагирует только на низкочастотные сигналы, такая компенсация повышает точность. В большинстве систем управления упомянутые компенсаторы могут быть механическими или электрическими, и проектировщик имеет полную свободу в их подборе для достижения наилучшей эффективности.
Еще один метод улучшения управления – введение дополнительных (вторичных) контуров обратной связи, в которых могут вырабатываться любые нужные составляющие сигнала. В конкретной ситуации проектировщику предоставляется выбор комбинации из самых последних методов, обеспечивающих правильное проектирование системы управления.
В рассмотренных выше случаях предполагается, что управляемый процесс или объект неизменны, а система управления и компенсирующие элементы подгоняются под процесс. С ростом потребности в управлении во многих отраслях промышленности и техники нет ничего необычного в том, что сами установки проектируются так, чтобы получить максимум преимуществ от использования последних достижений теории управления. В таких случаях сама установка становится частью системы управления. Действительно, по мере усложнения систем с обратной связью среди конструкторов и специалистов по управлению растет осознание того, что, хотя различные части системы, например ракеты, могут исследоваться и анализироваться независимо, сама система должна проектироваться как единое целое. Этот аспект проектирования сложных систем приобрел важное значение и получил название «системного анализа», или «системотехники».
Этот аспект проектирования сложных систем приобрел важное значение и получил название «системного анализа», или «системотехники».
См. также СИСТЕМОТЕХНИКА.
Сложные системы управления.
Любые самые сложные системы управления – будь то самолет, ядерный реактор или даже государство – включают функции оценки состояния, выработки сигнала обратной связи и управления. Главная задача любой системы управления – сделать выходные сигналы близкими к нужным значениям как можно быстрее и точнее. Другой важной характеристикой системы управления является ее устойчивость, т.е. ситуация, когда ее выходные сигналы не превышают заданных пределов. Следовательно, устойчивость, быстродействие и точность рассматриваются в качестве основных целей при проектировании эффективной системы управления. Однако в некоторых системах увеличение быстродействия сверх определенного предела может вызвать снижение точности и даже привести к неустойчивости. Поэтому достижение наилучшего соотношения между этими характеристиками является одной из важнейших задач проектирования системы управления.
В динамической системе, т.е. в такой системе, характеристики которой изменяются в зависимости от времени и места, три фактора осложняют задачу управления: 1) система имеет большое число входов и выходов; 2) имеется неточность в измерении характеристик или знании системы; 3) поскольку характеристики системы все время изменяются, может оказаться затруднительным расчет требуемых управляющих сигналов.
Чтобы количественно оценить влияние входов системы на ее выходы, нужна математическая модель этой системы. Для этого может быть применен компьютер. Вообще, компьютер используется во всех сложных системах, выполняя операции оценки состояния, выработки сигнала обратной связи и управления. В 1960-х годах были разработаны основы современной математической теории оптимального управления. Они позволяют генерировать управляющие сигналы, которые оптимизируют тот или иной показатель эффективности – например, время, энергию, расход топлива или стоимость – в больших системах, для которых могут быть разработаны точные математические модели.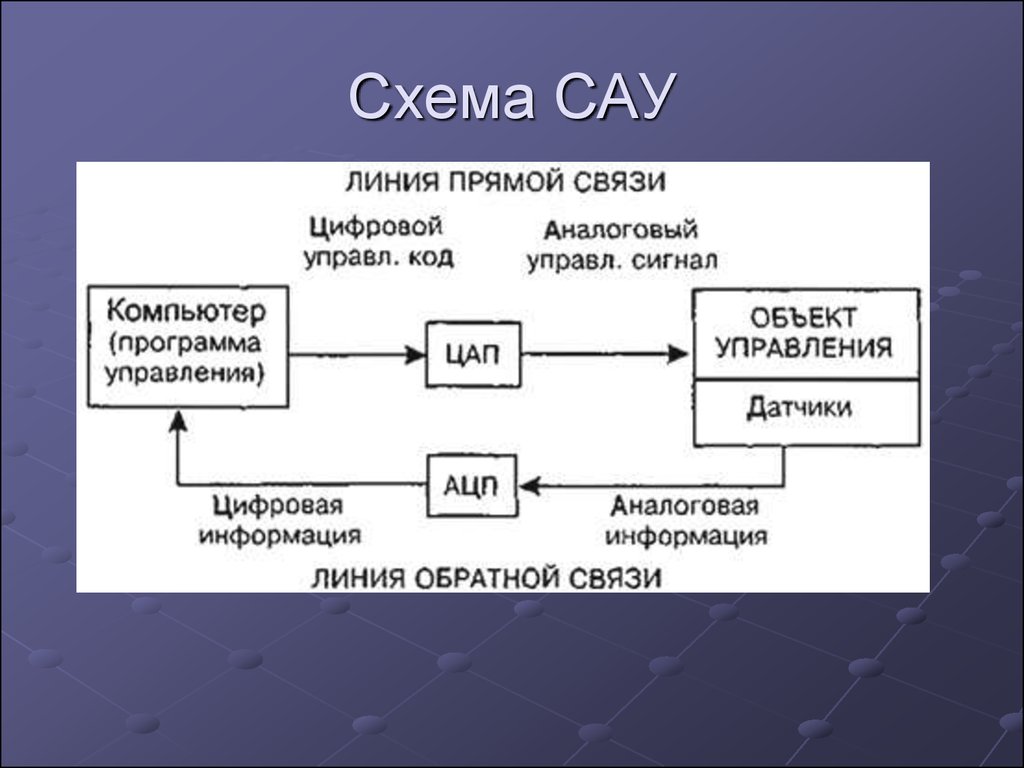
Адаптация, обучение и искусственный интеллект.
В реальном мире большинство систем не только изменяются в зависимости от времени и места, но и не могут быть представлены точными математическими моделями. Необходимость управлять такими системами привела к созданию новых теорий адаптации, обучения и самоорганизации. Это, в свою очередь, привело к появлению сложных систем управления с обратной связью, в которых компьютер выполняет эксперименты над системой, исследует ее характеристики в процессе работы и меняет стратегию управления. Можно сказать, что такие системы управления имитируют адаптивные способности живых организмов в изменяющихся и неопределенных условиях среды. Таким образом, вообще говоря, адаптивная система управления требует двух различных операций: идентификации характеристик управляемой системы и настройки параметров управляющей системы с учетом динамики управляемой.
Другой областью исследований, оказывающей существенное влияние на проектирование сложных автоматических систем, является теория обучения. Идеи, развитые в математической психологии, могут быть применены к проектированию систем, использующих обратную связь по состоянию, что позволяет выбрать оптимальное действие из конечного набора действий. Распознавание образов – одна из форм обучения, нашедшая применение в некоторых современных системах с обратной связью. Если управляемая система имеет конечное число состояний, а параметры оптимального управления, соответствующие каждому состоянию, сохраняются в памяти компьютера, то скорость адаптации системы управления может быть существенно повышена с помощью устройства распознавания. Например, на космическом корабле распознавание состояния по измерениям температуры, влажности, давления, вибраций, радиации и т.п. является задачей распознавания образов.
Идеи, развитые в математической психологии, могут быть применены к проектированию систем, использующих обратную связь по состоянию, что позволяет выбрать оптимальное действие из конечного набора действий. Распознавание образов – одна из форм обучения, нашедшая применение в некоторых современных системах с обратной связью. Если управляемая система имеет конечное число состояний, а параметры оптимального управления, соответствующие каждому состоянию, сохраняются в памяти компьютера, то скорость адаптации системы управления может быть существенно повышена с помощью устройства распознавания. Например, на космическом корабле распознавание состояния по измерениям температуры, влажности, давления, вибраций, радиации и т.п. является задачей распознавания образов.
Кроме исследований, упомянутых выше, многое делается в области разработки искусственного интеллекта, который включает более высокие уровни обратной связи, такие, как поиск информации, перевод с одного языка на другой, игры, доказательство теорем и решение комплексных проблем. Эти идеи начинают находить применение в различных областях современной науки и технологии. Электроника и компьютерные технологии, особенно разработка микропроцессоров, открыли новые пути применения теорий управления, основанных на сложных формах обратной связи. Человечество вступает в эру, где какие-либо применения будут ограничиваться только состоянием теории и воображением проектировщика.
Эти идеи начинают находить применение в различных областях современной науки и технологии. Электроника и компьютерные технологии, особенно разработка микропроцессоров, открыли новые пути применения теорий управления, основанных на сложных формах обратной связи. Человечество вступает в эру, где какие-либо применения будут ограничиваться только состоянием теории и воображением проектировщика.
См. также ИНТЕЛЛЕКТ ИСКУССТВЕННЫЙ; КОМПЬЮТЕР; ЭЛЕКТРОННАЯ ПРОМЫШЛЕННОСТЬ; ИНФОРМАЦИИ НАКОПЛЕНИЕ И ПОИСК; ИНФОРМАЦИИ ТЕОРИЯ.
Управление с обратной связью
Управление с обратной связью
Управление и кибернетика
Печатать книги
Компьютер
Выполнять чертежи
Использовать для управления
Производить расчёты
Управляющее воздействие производится в разных формах:
Человек
- нажимает клавишу поворачивает ручку управления телевизором
- нажимает клавишу
- поворачивает ручку управления телевизором
Светофор
разными
цветами
- управляет движением автомобилей управляет движением пешеходов на перекрестке
- управляет движением автомобилей
- управляет движением пешеходов на перекрестке
- голосом подает команду собаке
- голосом подает команду собаке
Хозяин
Световые сигналы светофора шофер воспринимает как команды:
Стоять
Ехать
Приготовиться
Обратная связь
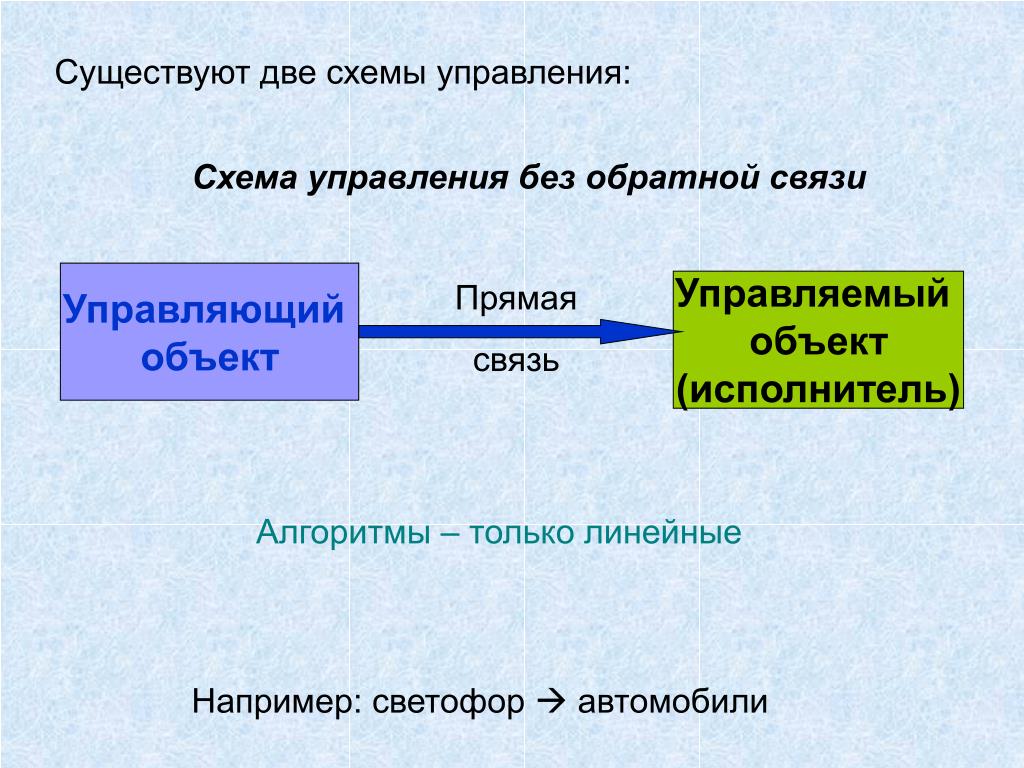
- Строго в соответствии со схемой работает только система «светофор – автомобили».
 Светофор «не глядя» управляет движением машин, не обращая внимания на обстановку на перекрестке.
Светофор «не глядя» управляет движением машин, не обращая внимания на обстановку на перекрестке. - Иначе протекает процесс управления телевизором или собакой. Прежде чем отдать очередную команду, человек смотрит на состояние объекта управления, на результат выполнения предыдущей команды. Если он не нашел нужную передачу на данном канале, то он переключит телевизор на следующий канал; если собака не выполнила команду «лежать!», хозяин повторит эту команду.
- Управление происходит эффективнее, если управляющий не только отдает команды, т.е. работает прямая связь , но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью .
- Обратная связь — это процесс передачи информации о состоянии объекта управления управляющему объекту.
Модель управления с обратной связью
Управляющее
Управляющий объект
Управляемый объект
воздействие
Обратная связь
Линейный алгоритм
Светофор «не глядя» управляет движением машин, не обращая внимания на обстановку на перекрестке
Красный
Зеленый
Желтый
Алгоритм с ветвлением
Если вместо светофора на перекрестке дорог работает полицейский-регулировщик, то управление движением станет более рациональным. Регулировщик следит за скоплением машин на пересекающихся дорогах и дает «зеленую улицу» в том направлении, в котором в данный момент это нужнее. Нередко из-за «безмозглого» управления светофора на дорогах возникают «пробки». И тут непременно приходит на помощь регулировщик.
Регулировщик следит за скоплением машин на пересекающихся дорогах и дает «зеленую улицу» в том направлении, в котором в данный момент это нужнее. Нередко из-за «безмозглого» управления светофора на дорогах возникают «пробки». И тут непременно приходит на помощь регулировщик.
Алгоритм с ветвлением
ЕСЛИ НА ДОРОГЕ-1 СКОПИЛОСЬ БОЛЬШЕ МАШИН
ТО ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-1
ИНАЧЕ ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-2
Циклический алгоритм
ВКЛЮЧИТЬ ТЕЛЕВИЗОР НА 1-М КАНАЛЕ
ПОКА НЕ БУДЕТ НАЙДЕНА ИСКОМАЯ ПЕРЕДАЧА,
ПОВТОРЯТЬ:
ПЕРЕКЛЮЧИТЬ ТЕЛЕВИЗОР НА СЛЕДУЮЩИЙКАНАЛ
- В варианте управления без обратной связи алгоритм может представлять собой только однозначную (линейную) последовательность команд .
- При наличии обратной связи и «интеллектуального» управляющего объекта алгоритмы управления могут иметь сложную структуру, содержащую альтернативные команды (ветвления) и повторяющиеся команды (циклы)
Системы управления
Замкнутые
- содержащие ветвь обратной связи
- содержащие ветвь обратной связи
Разомкнутые
- не содержащие ветвь обратной связи
- не содержащие ветвь обратной связи
- Обратная связь , обратное воздействие результатов процесса на его протекание или управляемого процесса на управляющий орган.
- Обратная связь характеризует системы регулирования и управления в живой природе, обществе и технике.
Обратная связь
- результаты процесса усиливают его действие
- результаты процесса усиливают его действие
Положительная
- результаты процесса ослабляют его действие
- результаты процесса ослабляют его действие
Отрицательная
- Отрицательная обратная связь стабилизирует протекание процессов.
- Положительная обратная связь , напротив, обычно приводит к ускоренному развитию процессов и к колебательным процессам.
- В сложных системах (например, в социальных, биологических) определение типов обратная связь затруднительно, а иногда и невозможно.
Обратную связь различают по виду преобразования воздействия в цепи
Жесткую
Дифференцирующую
Интегрирующую
Автоматические
Неавтоматические
Автоматизированные
В зависимости от степени участия человека в процессе управления системы управления деется на три класса
Автоматические системы управления
В системах автоматического управления все процессы, связанные с получением информации о состоянии управляемого объекта, обработкой этой информации, формированием управляющих сигналов и пр. , осуществляются автоматически.
, осуществляются автоматически.
В подобных системах не требуется непосредственное участие человека. Системы автоматического управления используются на космических спутниках, на опасном для здоровья человека производстве, в ткацкой и литейной промышленности, в хлебопекарнях, при поточном производстве, при изготовлении микросхем, и пр.
Неавтоматические системы управления
В неавтоматических системах управления человек сам оценивает состояние объекта управления и на основе этой оценки воздействует на него.
Дирижер управляет оркестром, исполняющим музыкальное произведение. Учитель на уроке управляет классом в процессе обучения, водитель управляет автомобилем.
Автоматизированные системы управления
В автоматизированных системах управления сбор и обработка информации, необходимой для выработки управляющих воздействий, осуществляется автоматически, при помощи аппаратуры и компьютерной техники, а решение по управлению принимает человек.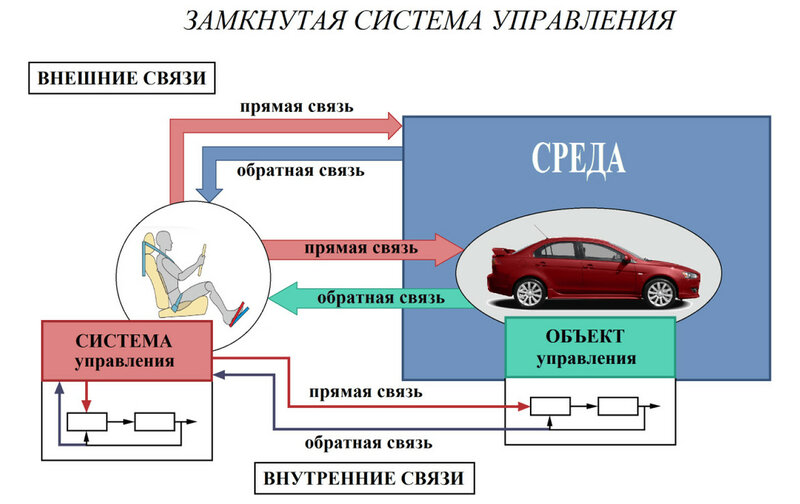
Автоматизированная система продажи железнодорожных, автобусных или авиационных билетов, льготных проездных билетов работает под управлением человека, который запрашивает у компьютера необходимую информацию и на ее основе принимает решение о продаже.
Совокупность информационных потоков, средств обработки, передачи и хранения данных, а также сотрудников управленческого аппарата, выполняющих операции по переработке данных, составляет информационную систему управления объектом.
первое
- между компьютером и объектом управления должна быть обеспечена прямая и обратная связь
- между компьютером и объектом управления должна быть обеспечена прямая и обратная связь
второе
- в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования)
- в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования)
Для функционирования информационной системы :
Программное управление широко используется в технических системах:
автопилот в самолете
автоматическая линия на заводе
ускоритель элементарных частиц
атомный реактор на электростанции
и пр.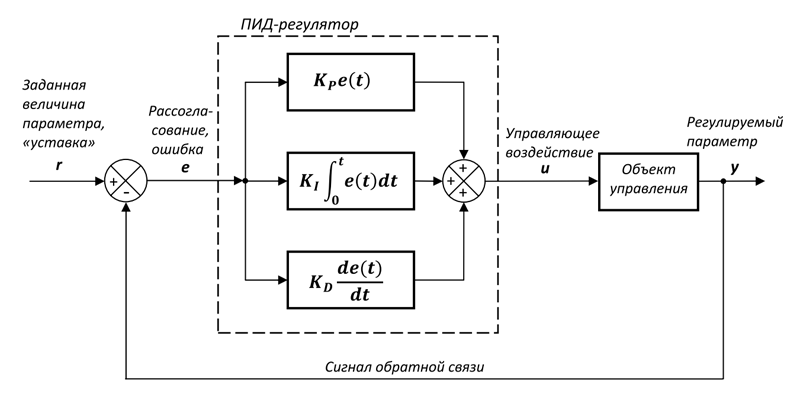
Тематический диктант
- Кто, где и когда провозгласил рождение новой науки связанной с разработкой теории управления?
- Что такое управление?
- Изобразить схему процесса управления без обратной связи, привести примеры.
- Изобразить схему процесса управления с обратной связью, привести примеры.
- Что называется обратной связью?
- Виды обратной связи.
- Перечислить три класса процессов управления.
Автоматизация | Технология, типы, рост, история и примеры
Жаккардовый ткацкий станок
Смотреть все СМИ
- Ключевые люди:
- Жак де Вокансон
- Похожие темы:
- компьютерно-интегрированные производства
стационарная автоматизация
машинное программирование
промышленный робот
автоматическое производство
Просмотреть весь связанный контент →
автоматизация , применение машин к задачам, которые когда-то выполнялись людьми или, все чаще, к задачам, которые иначе были бы невозможны. Хотя термин механизация часто используется для обозначения простой замены человеческого труда машинами, автоматизация обычно подразумевает интеграцию машин в самоуправляемую систему. Автоматизация произвела революцию в тех областях, в которых она была внедрена, и едва ли найдется аспект современной жизни, на который она не повлияла.
Хотя термин механизация часто используется для обозначения простой замены человеческого труда машинами, автоматизация обычно подразумевает интеграцию машин в самоуправляемую систему. Автоматизация произвела революцию в тех областях, в которых она была внедрена, и едва ли найдется аспект современной жизни, на который она не повлияла.
Термин «автоматизация» был придуман в автомобильной промышленности примерно в 1946 году для описания более широкого использования автоматических устройств и средств управления на механизированных производственных линиях. Происхождение слова приписывают Д. С. Хардеру, в то время техническому директору Ford Motor Company. Этот термин широко используется в производственном контексте, но он также применяется вне производства в связи с различными системами, в которых механическое, электрическое или компьютеризированное действие в значительной степени заменяет человеческие усилия и интеллект.
В общем случае автоматизацию можно определить как технологию, связанную с выполнением процесса с помощью запрограммированных команд в сочетании с автоматическим контролем обратной связи для обеспечения надлежащего выполнения инструкций. Полученная система способна работать без вмешательства человека. Развитие этой технологии все больше зависит от использования компьютеров и связанных с ними технологий. Следовательно, автоматизированные системы становятся все более изощренными и сложными. Усовершенствованные системы представляют собой уровень возможностей и производительности, которые во многих отношениях превосходят способности людей выполнять те же действия.
Полученная система способна работать без вмешательства человека. Развитие этой технологии все больше зависит от использования компьютеров и связанных с ними технологий. Следовательно, автоматизированные системы становятся все более изощренными и сложными. Усовершенствованные системы представляют собой уровень возможностей и производительности, которые во многих отношениях превосходят способности людей выполнять те же действия.
Технологии автоматизации созрели до такой степени, что ряд других технологий развился из них и получил собственное признание и статус. Робототехника — одна из таких технологий; это специализированная отрасль автоматизации, в которой автоматическая машина обладает определенными антропоморфными или человекоподобными характеристиками. Наиболее типичной человеческой характеристикой современного промышленного робота является его механическая рука с приводом. Рука робота может быть запрограммирована на выполнение последовательности движений для выполнения полезных задач, таких как загрузка и разгрузка деталей на производственной машине или выполнение последовательности точечных сварок на листовых частях кузова автомобиля во время сборки. Как показывают эти примеры, промышленные роботы обычно используются для замены людей в фабричных операциях.
Как показывают эти примеры, промышленные роботы обычно используются для замены людей в фабричных операциях.
Викторина «Британника»
Машиностроение и производство
В этой статье рассматриваются основы автоматизации, включая ее историческое развитие, принципы и теорию работы, применение на производстве и в некоторых сферах услуг и отраслях, важных в повседневной жизни, а также влияние на человека и общество в целом. В статье также рассматривается разработка и технология робототехники как важная тема в области автоматизации. Связанные темы см. в разделе Информатика и обработка информации.
Историческое развитие автоматизации
Технология автоматизации развилась из родственной области механизации, начало которой положила промышленная революция. Механизация относится к замене силы человека (или животного) механической силой той или иной формы. Движущей силой механизации была склонность человечества к созданию инструментов и механических устройств.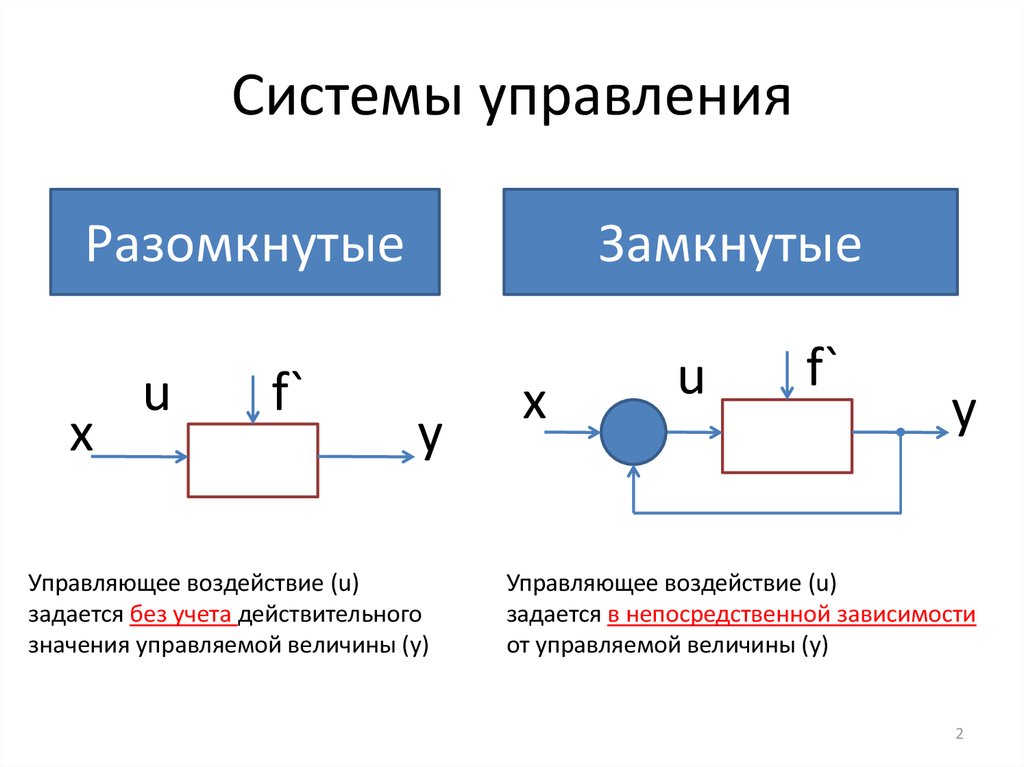 Здесь описаны некоторые важные исторические разработки в области механизации и автоматизации, приведшие к созданию современных автоматизированных систем.
Здесь описаны некоторые важные исторические разработки в области механизации и автоматизации, приведшие к созданию современных автоматизированных систем.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
Ранние разработки
Первые инструменты из камня представляли собой попытки доисторического человека направить свою физическую силу под контроль человеческого разума. Тысячи лет, несомненно, потребовались для разработки простых механических устройств и машин, таких как колесо, рычаг и шкив, с помощью которых можно было увеличить силу человеческих мышц. Следующим расширением стала разработка механических машин, для работы которых не требовалась человеческая сила. Примеры этих машин включают водяные колеса, ветряные мельницы и простые устройства с паровым приводом. Более 2000 лет назад китайцы разработали отбойные молотки, приводимые в движение проточной водой и водяными колесами. Первые греки экспериментировали с простыми реактивными двигателями, работающими от пара. Механические часы, представляющие собой довольно сложный узел с собственным встроенным источником питания (гирей), были разработаны около 1335 года в Европе. Ветряные мельницы с механизмами автоматического поворота парусов были разработаны в средние века в Европе и на Ближнем Востоке. Паровой двигатель стал крупным достижением в развитии механических машин и положил начало промышленной революции. В течение двух столетий, прошедших с момента появления паровой машины Уатта, были изобретены механические двигатели и машины, получающие энергию от пара, электричества, химических, механических и ядерных источников.
Механические часы, представляющие собой довольно сложный узел с собственным встроенным источником питания (гирей), были разработаны около 1335 года в Европе. Ветряные мельницы с механизмами автоматического поворота парусов были разработаны в средние века в Европе и на Ближнем Востоке. Паровой двигатель стал крупным достижением в развитии механических машин и положил начало промышленной революции. В течение двух столетий, прошедших с момента появления паровой машины Уатта, были изобретены механические двигатели и машины, получающие энергию от пара, электричества, химических, механических и ядерных источников.
Каждая новая разработка в истории механических машин влекла за собой повышенные требования к устройствам управления для использования мощности машины. Самые ранние паровые двигатели требовали, чтобы человек открывал и закрывал клапаны, чтобы сначала впустить пар в поршневую камеру, а затем выпустить его. Позже был разработан механизм золотникового клапана для автоматического выполнения этих функций.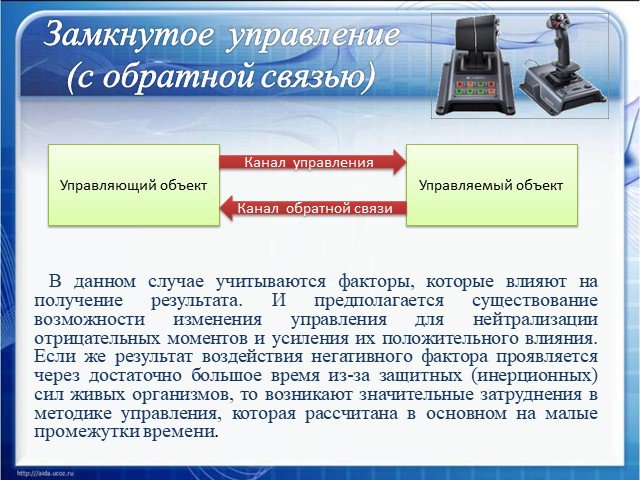 Единственная потребность человека-оператора заключалась в том, чтобы регулировать количество пара, которое контролировало скорость и мощность двигателя. Это требование человеческого внимания при работе паровой машины было устранено регулятором летающих шаров. Это устройство, изобретенное Джеймсом Уаттом в Англии, состояло из утяжеленного шара на шарнирном рычаге, механически соединенного с выходным валом двигателя. По мере увеличения скорости вращения вала центробежная сила заставляла утяжеленный шар двигаться наружу. Это движение управляло клапаном, который уменьшал подачу пара в двигатель, тем самым замедляя двигатель. Регулятор летающего шара остается элегантным ранним примером системы управления с отрицательной обратной связью, в которой увеличение выходной мощности системы используется для снижения активности системы.
Единственная потребность человека-оператора заключалась в том, чтобы регулировать количество пара, которое контролировало скорость и мощность двигателя. Это требование человеческого внимания при работе паровой машины было устранено регулятором летающих шаров. Это устройство, изобретенное Джеймсом Уаттом в Англии, состояло из утяжеленного шара на шарнирном рычаге, механически соединенного с выходным валом двигателя. По мере увеличения скорости вращения вала центробежная сила заставляла утяжеленный шар двигаться наружу. Это движение управляло клапаном, который уменьшал подачу пара в двигатель, тем самым замедляя двигатель. Регулятор летающего шара остается элегантным ранним примером системы управления с отрицательной обратной связью, в которой увеличение выходной мощности системы используется для снижения активности системы.
Отрицательная обратная связь широко используется как средство автоматического управления для достижения постоянного уровня работы системы. Типичным примером системы управления с обратной связью является термостат, используемый в современных зданиях для контроля температуры в помещении.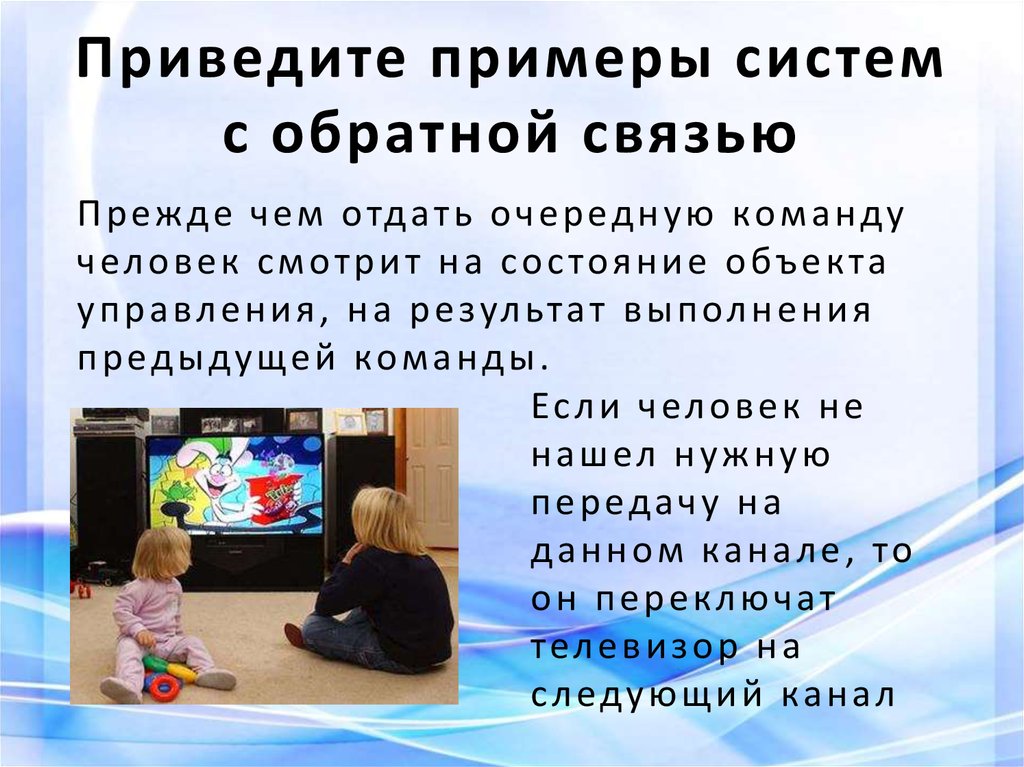 В этом устройстве понижение температуры в помещении приводит к замыканию электрического выключателя, в результате чего нагреватель включается. При повышении температуры в помещении выключатель размыкается и подача тепла отключается. Термостат можно настроить на включение нагревателя при любой заданной температуре.
В этом устройстве понижение температуры в помещении приводит к замыканию электрического выключателя, в результате чего нагреватель включается. При повышении температуры в помещении выключатель размыкается и подача тепла отключается. Термостат можно настроить на включение нагревателя при любой заданной температуре.
Еще одним важным событием в истории автоматизации стал жаккардовый ткацкий станок (см. фотографию), который продемонстрировал концепцию программируемой машины. Около 1801 года французский изобретатель Жозеф-Мари Жаккард изобрел автоматический ткацкий станок, способный создавать сложные узоры на текстиле, управляя движением множества челноков с разноцветными нитями. Выбор различных рисунков определялся программой, содержащейся в стальных картах, в которых были пробиты отверстия. Эти карты были предками бумажных карт и лент, которыми управляют современные автоматические машины. Концепция программирования машины получила дальнейшее развитие позже в 19 веке.век, когда Чарльз Бэббидж, английский математик, предложил сложную механическую «аналитическую машину», которая могла бы выполнять арифметические операции и обработку данных. Хотя Бэббидж так и не смог завершить его, это устройство было предшественником современного цифрового компьютера. См. компьютеры.
Хотя Бэббидж так и не смог завершить его, это устройство было предшественником современного цифрового компьютера. См. компьютеры.
Опросы клиентов | FeedbackAutomatic.com
Как мы помогаем вам привлечь больше клиентов
Когда клиент оставляет отзыв…
Отправьте своего клиента на выбранный вами сайт отзывов, чтобы оставить общедоступный отзыв.
Отправить вам личное сообщение вместо публичного обзора.
Больше отзывов ведет к более высокому рейтингу в поиске, большему доверию, большему количеству кликов, большему количеству звонков и, в конечном счете, ведет к росту бизнеса.
Больше отзывов ведет к более высокому рейтингу в поиске, большему доверию, большему количеству кликов, большему количеству звонков и, в конечном счете, ведет к росту бизнеса.
Как это работает
Мы действительно делаем это проще
Загрузите свой список клиентов.
…или поделитесь ссылкой на своем веб-сайте, в своих электронных письмах и т.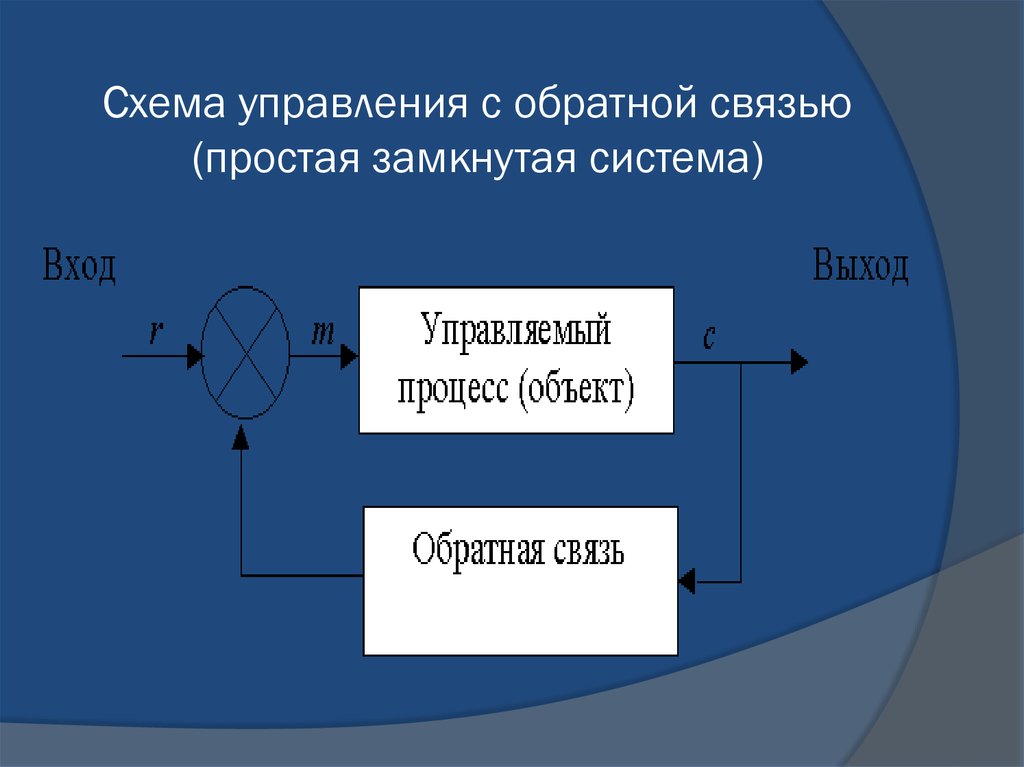 д..
д..
Фирменные электронные письма Запрос обратной связи.
Фирменные электронные письма вежливо просят оставить отзыв о ваших услугах…
Клиентам напоминают оставить отзыв
Система отправляет напоминания, чтобы запросить отзыв.
Интеграция с
Популярные сервисы, которыми вы уже пользуетесь
Функции
Чем мы отличаемся
| Bad Review Gatekeeper | Feedback Automatic | «0 0 9″9093» 0092 | Автоматическое сопровождение | Автоматическая обратная связь | «Другие» |
| Рабочий процесс разрешения | 3 «Другие» | ||||
| Персонализация вопросов | Автоматическая обратная связь | «Другие» | |||
| Мультибрендовый единый вход | Автоматическая обратная связь | «Другие» | |||
| Текстовое сообщение ссылка | Обратная связь Автоматически | «Другие» | |||
| Журнал аудита соответствия | Обратная связь Автоматически | «Другие» | |||
| Экспорт CSV 0094 | «Другие» | ||||
| Пользовательский брендинг | Автоматическая обратная связь | «Другие» | |||
| Виджет веб-сайта | Автоматическая обратная связь | «Другие» | |||
| Информационная панель, отчетность, экспорт | Автоматическая обратная связь | «Другие» | |||
| Интегрируется с большинством программ Начиная с Плюс $499 Установка Неограниченное количество пользователей Скидки доступны для нескольких офисов или брендов. |
Всего комментариев: 0