Механический манипулятор своими руками: Дешевый и полнофункциональный робот-манипулятор своими руками / Хабр
Содержание
Рука-манипулятор для сборки деталей с конвейера. Пошаговая инструкция по созданию
Содержание:
- Введение
- Видеопрезентация работы
- Шаг 1. Робот без рабочей станции
- Шаг 2. Разборка конвейерной ленты от старых частей
- Шаг 3. Подключение датчика
- Шаг 4. Преобразователи частоты
- Шаг 5. Создание паллет
- Шаг 6. Завершение конвейерной ленты
- Шаг 7.
- Шаг 8. Программирование робота
- Шаг 9. Заключение
Введение:
Это проект робота, который содержит шесть степеней свободы манипулятора. Устройство может применяться на производственной линии, как заготовка для конвейерной ленты, работая с паллетами на рабочей станции. Главной целью проекта было проверить, является ли манипулятор достаточно точным для сборки деталей, когда они движутся на конвейере. Эта сборка, конечно, не нашла широкого применения в промышленности, но всё возможно в будущем.
Как он работает?
Существует инкрементный датчик на нижней стороне электродвигателя, который подает информацию к основному блоку процессора манипулятора, чтобы иметь возможность рассчитать фактическую скорость и смещение конвейера.
На стороне конвейера есть несколько индуктивных датчиков, которые могут обнаруживать паллеты алюминия, когда они проходят мимо них. Используя эту информацию, захват руки робота может следовать паллету с той же скоростью, и может сделать все монтажные работы. Скорость конвейерной ленты можно регулировать с помощью двух преобразователей частот. Паллет может быть остановлен в нескольких точках с пневматической пробкой, и он возвращается в исходное положение с помощью селектора пневматическим способом.
Для создания робота было бы неплохо использовать 3D-принтер, который подойдет для печати больших объектов (максимальный размер ~ 1,2 м * 0,8 м). Было бы здорово увеличить головку манипулятора, а также использовать вентилятор компьютера для того, чтобы пластиковые нити остыли быстро. В общем, немного объектов будет необходимо для печатного объекта.
Видеопрезентация работы:
Здесь можно увидеть робота и его рабочую станцию во время выполнения
одной простой задачи сборки на 30% от максимальной скорости:
Шаг 1. Робот без рабочей станции:
Так выглядит промышленная рука-манипулятор без какой-либо рабочей станции.
Шаг 2. Разборка конвейерной ленты от старых частей:
Если у вас есть возможность использовать некоторые старые части из конвейерной ленты, вы можете разобрать их, убрав часть от масла и других загрязнений, и повторно собрать один «новый» конвейер нужной длины и размеров, и вернуть все недостающие части.
Шаг 3. Подключение датчика:
Для того, чтобы определить скорость двигателя (и, следовательно, скорость конвейера), поверните ось к нижней стороне электродвигателя. Также ось двигателя необходима, чтобы иметь возможность изменить расширение устройства. На другом конце расширения нужно установить инкрементный датчик Megatron (MHL40 8 1000 5 BZ NA).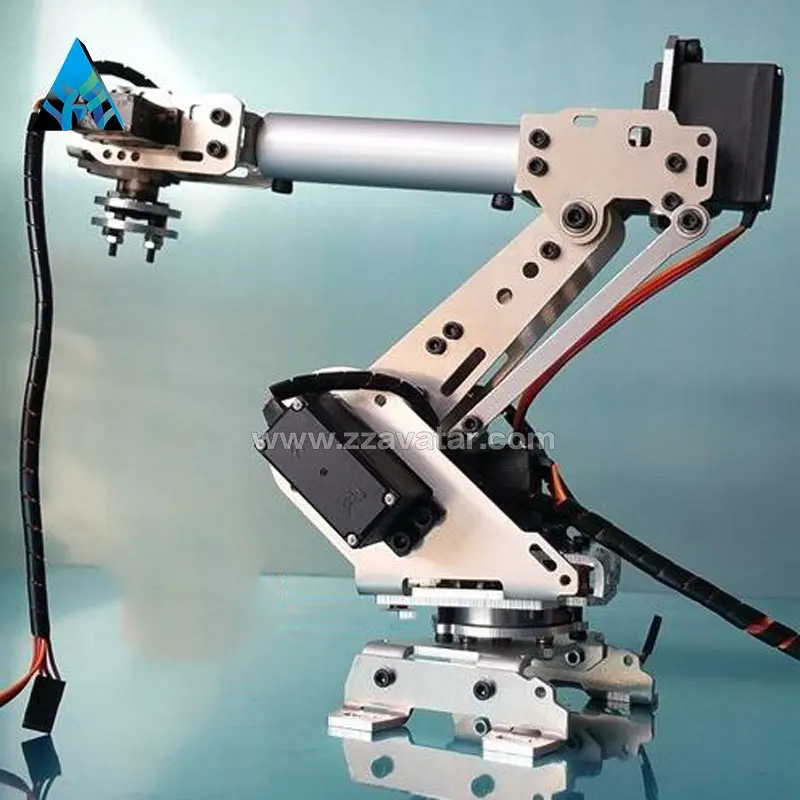 Основные части датчика: источник света (светодиод), который светит через диск с отверстиями. На другой стороне этого диска есть датчик света, который считает импульсы входящего света, и передает эти сигналы на главный процессор робота. Первая настройка необходима для того, чтобы синхронизировать роботизированную систему координат, переместить конвейерную ленту, и вращать датчик на этом расстоянии.
Основные части датчика: источник света (светодиод), который светит через диск с отверстиями. На другой стороне этого диска есть датчик света, который считает импульсы входящего света, и передает эти сигналы на главный процессор робота. Первая настройка необходима для того, чтобы синхронизировать роботизированную систему координат, переместить конвейерную ленту, и вращать датчик на этом расстоянии.
После этого робот вычисляет сигналы датчика расстояния в его системе координат. Одной из самых сложных и трудоемких задач (после повторного собрания механической части конвейера) было сделать правильные настройки для этой синхронизации. Для этого необходимо написать программу, которая обрабатывает преобразователи частоты для запуска конвейера и открыть-закрыть пневматические пробки, и, конечно, необходимо переместить робота в области и нужные позиции. Основные направления этой синхронизации кода доступны в руководстве по работе с роботом (Mitsubishi RV-3SDB) в формате PDF. Ниже доступен код с настройками.
Шаг 4. Преобразователи частоты:
Преобразователи частоты необходимы, чтобы иметь возможность контролировать скорость вращения двигателя. Он работает первоначально с частотой 50 Гц, но это слишком быстро для этой процедуры. Установите частоту 33Гц на базовой настройке. Благодаря скорости изменения входа селектора, есть также возможность изменения скорости в программном коде робота. Преобразователь частоты поставляется в использованном варианте, но делает свою работу очень хорошо. Также аварийный выключатель (большая красная кнопка) необходим для подключения по соображениям безопасности.
Шаг 5. Создание паллет:
Все части паллет являются ручной работой. Были сделаны только «заготовки». К сожалению, возможность 3D печати не доступна здесь, так как эти части должны быть сделаны из алюминия или из пластика. На верхней части паллет нужно установить шарикоподшипники, чтобы иметь лучшие обороты по краям. Большой кусок алюминия необходим из-за близости индуктивных датчиков.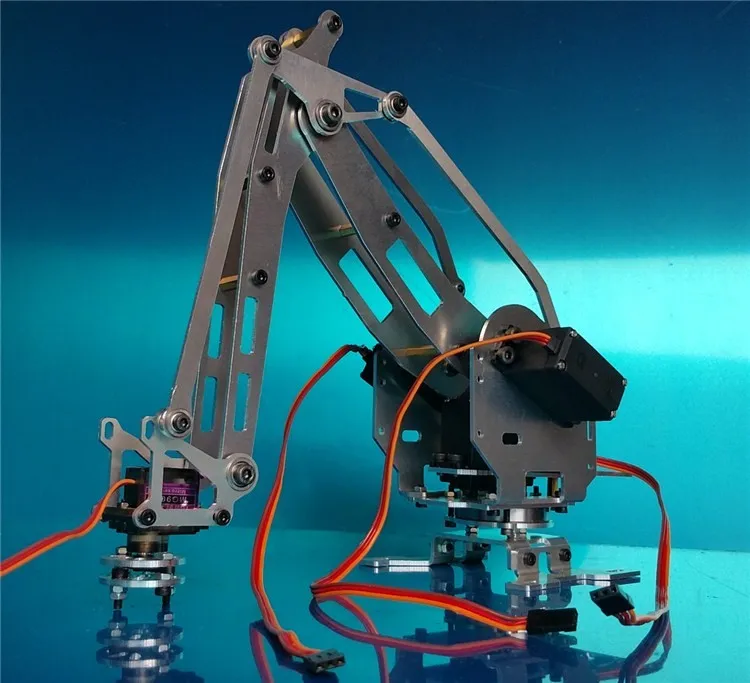
Шаг 6. Завершение конвейерной ленты:
После нужно добавить стартовую точку и конечную точку конвейерной ленты. Также интегрирован выход селектора. Он работает с пневматическими переключателями.
Шаг 7.
Пневматические переключатели останавливают и пропускают паллет. В начальной точке есть индуктивный датчик приближения, чтобы убедиться, что паллет настроен перед началом сборки. Затем коммутатор освобождает паллет, который проходит мимо второго датчика на близком расстоянии. Это дает сигнал на главный процессор, который обрабатывает сигналы датчика, называемые «живые». Расстояние измеряется отсюда. Есть и другая пробка и датчик на конце линии. (Существует возможность поставить более паллет на конвейере в одно и то же время, но тем самым необходима безопасность остановки, прежде чем дать паллету способ выбора.)
«Электрическая часть» рабочей станция находится только в предварительной версии: она должна быть вмонтирована в электрическую кабину.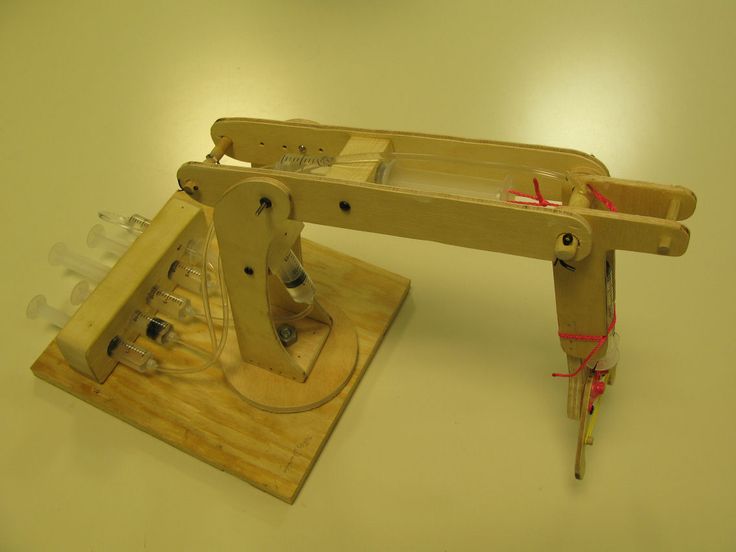 (Вопрос только в деньгах.)
(Вопрос только в деньгах.)
Шаг 8. Программирование робота:
Основные команды для кода сборки:
- M_Out (N) = 1: включение или выключение выходов (например, пневматических переключателей или двигателей)
- Wait M_In(n) = 1: подождите нарастающий сигнал (например, сигналы индуктивных датчиков)
- m1 = M_Enc (1): при запуске функции отслеживания он дает мгновенное значение кодера к m1 целому.
- Trk On,pfog,m1: включение функции отслеживания движений робота.
- Trk Off: выключение функции отслеживания и возвращения к «нормальной» системе координат робота.
Примечание автора: весь код программы написан с комментариями на венгерском языке, так что при возникновении трудностей, обращайтесь за помощью к переводчику (Google Translator подойдет).
Servo On ‘Robot szervo bekapcsolása
Ovrd 70 ‘70%-os sebesség
Mov phome2 ‘a darab várakozási pozícióba álljon
‘Futószalag összeszerelő ág nullázása (mert a frekvenciaváltó felfutó és lefutó élre is reagál).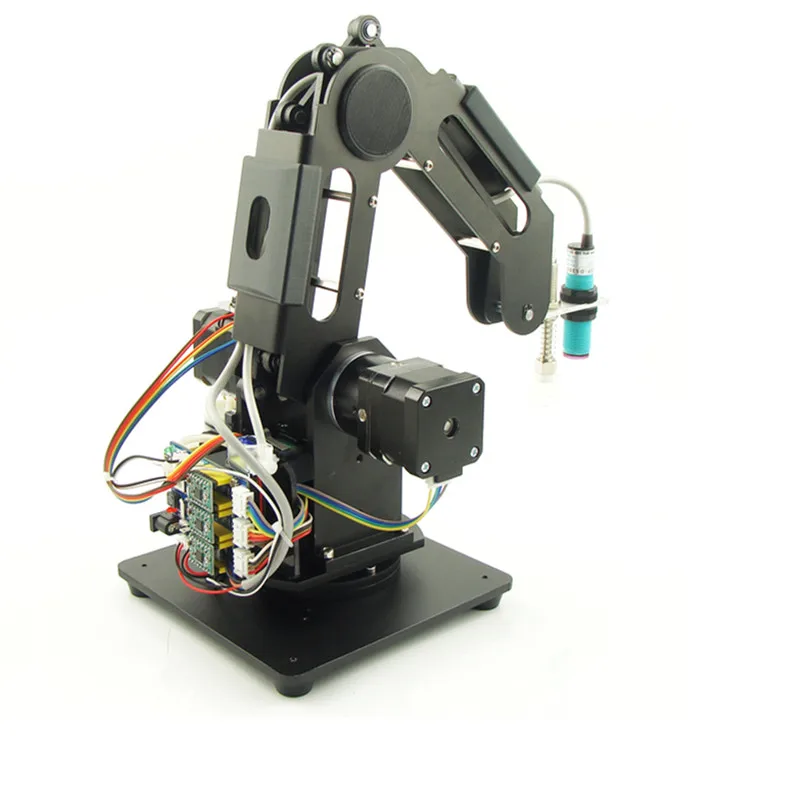
M_Out(5)=0 ‘összeszerelő ág hátramenet nullázása
M_Out(6)=0 ‘összeszerelő ág előremenet nullázása
M_Out(8)=0 ‘visszavezető ág előremenet nullázása
M_Out(9)=0 ‘visszavezető ág hátramenet nullázása
‘
‘Vizsgálat kezdés előtt: ha a paletta nincs a kiindulási ponton, oda kell vinni.
If M_In(4)=0 Then GoSub *visszavezet ‘ha az első induktív jele 0, akkor nincs ott a paletta
*visszavezet
If M_In(4)=1 Then GoTo *indit ‘mivel ez rekurzív programrész, ha mar ott a paletta, kilépünk
M_Out(6)=1 ‘összeszerelő futószalag ág előre megy egy kicsit
M_Out(0)=1 ‘2. szelep (összeszerelő végpont) behúz
M_Out(2)=1 ‘váltó külső állásba tesz
M_Out(2)=0 ‘váltó nyomás visszavesz
Dly 7 ‘eddigre biztos a végére ér a paletta az összeszerelő ágnak
M_Out(1)=1 ‘váltó belső állásba tesz
M_Out(1)=0 ‘leveszi a váltóról a nyomást
M_Out(6)=0 ‘összeszerelő futószalag ág leállítása
Dly 0.5
M_Out(9)=1 ‘visszavezető ág futószalag beindul visszafelé
M_Out(5)=1 ‘összeszerelő ág hátramenetbe kapcsol
Wait M_In(4)=1 ‘addig vár, amíg az első induktív nem érzékel
M_Out(8)=0 ‘visszavezető futószalag leáll
Dly 1 ‘a paletta már a kiindulási pontban van
M_Out(5)=0 ‘összeszerelő ág hátra leáll
If M_In(4)=1 Then GoTo *indit
Return
*indit
M_Out(6)=1 ‘összeszerelő ág előremenetben indítása
M_Out(4)=1 ‘1. szelep behúz
szelep behúz
M_Out(2)=1 ‘váltó külső állás
M_Out(2)=0 ‘váltóról leveszi a nyomást
Wait M_In(6)=1 ‘indítást érzékelő induktív bejelez
m1=M_Enc(1) ‘ekkor felvesszük az enkóder pozícióját (szinkronizálás)
‘*var
‘abban az esetben szükséges csak, ha az indító érzékelő a robot munkaterén kívül van
‘PC=TrWcur(1,pjel,m1) ‘meg kell várnia a paletta beérkezését a munkatérbe
‘If PosCq(PC)<>1 Then GoTo *var ‘beért-e a munkatérbe?
‘If PC.Y>350 Then GoTo *var ‘beért-e a szerelési távolságba? (350mm)
‘If PC.Y<0 Then GoTo *var ‘probléma esetén már túlment volna ‘a szerelési távolságon
Trk On,pjel,m1 ‘tracking indítása
‘pjel: fixen beállítandó érték, a robot koordinátarendszerében az induktív ‘bejelzésekor a munkadarab pozíciója
‘m1: az enkóder pozíciója, amikor a munkadarab elérte az induktívot
‘innentől egy mozgó koordináta rendszerben leszünk, amelynek középpontja a munkadarab
Mov phenger,10 ‘felvesszük az első darabot
Mvs phenger
Dly 0. 25
25
Hclose 1
Dly 0.25
Mvs phenger, 10
Mov pkp,50
Mvs pkp
Dly 0.25
HOpen 1 ‘leraktuk a hengert
Dly 0.25
Mov pkp, 50
Mov pdugattyu, 10 ‘dugattyúért megy
Mvs pdugattyu
Dly 0.25
Hclose 1 ‘felvettük a dugattyút
Dly 0.25
Mvs pdugattyu, 10
Mov pkp, 50
Mvs pkp
Dly 0.25
HOpen 1 ‘leraktuk a dugattyút
Dly 0.25
Mov pkp, 50
Mov prugo, 10 ‘rugóért megy
Mvs prugo
Dly 0.25
Hclose 1 ‘felvettük a rugót
Dly 0.25
Mvs prugo, 10
Mov pkp, 50
Mvs pkp
Dly 0.25
HOpen 1 ‘leraktuk a rugót
Dly 0.25
Mov pkp, 50
Trk Off
Wait M_In(7)=1 ‘addig vár, amíg az harmadik(összeszerelő ág vége) induktív nem érzékel
M_Out(4)=0 ‘1. szelep kienged
M_Out(0)=1 ‘2. szelep (összeszerelő végpont) behúz
Wait M_In(7)=0 ‘addig vár, amíg az harmadik(összeszerelő ág vége) induktív előtt mar nincs ott a darab (tehát kifutott a végpontig)
Dly 1
M_Out(6)=0 ‘összeszerelő ág futószalag előre leállít
M_Out(1)=1 ‘váltó belső állás
M_Out(1)=0 ‘váltó belső állást kell nullázni
M_Out(0)=0 ‘2. szelep (összeszerelő végpont) kienged
szelep (összeszerelő végpont) kienged
M_Out(5)=1 ‘összeszerelő futószalag hátra indul
M_Out(9)=1 ‘visszavezető futószalag előre indul
Wait M_In(6)=1 ‘addig vár, amíg az visszavezető induktív nem érzékel (de nem történik semmi)
Wait M_In(4)=1 ‘addig vár, amíg az összeszerelő induktív nem érzékel (vissza nem ért a darab)
M_Out(5)=0 ‘összeszerelő futószalag hátra leáll
M_Out(9)=0 ‘visszavezető ág futószalag leáll
Mov phome2
Servo Off
Hlt
‘
‘kimenetek és bemenetek listája
‘szelepek
‘M_Out(0)=1 ‘2. szelep (összeszerelő végpont) behúz
‘M_Out(0)=0 ‘végpont szelep kienged
‘M_Out(1)=1 ‘váltó belső állásra vált
‘M_Out(1)=0 ‘váltó belső állás nyomás levesz
‘M_Out(2)=1 ‘váltó külső állásra állít
‘M_Out(2)=0 ‘itt nem kell nyomást levenni
‘M_Out(3)=1 ‘3.szelep (visszavezető ág) behúz
‘M_Out(3)=0 ‘3. szelep kienged
‘M_Out(4)=1 ‘1. szelep behúz
‘M_Out(4)=0 ‘1. szelep kienged
‘
‘Futószalag ágak nullázása (mindig kell, mert mindig a korábbi érték ellentétjére indul vagy áll meg).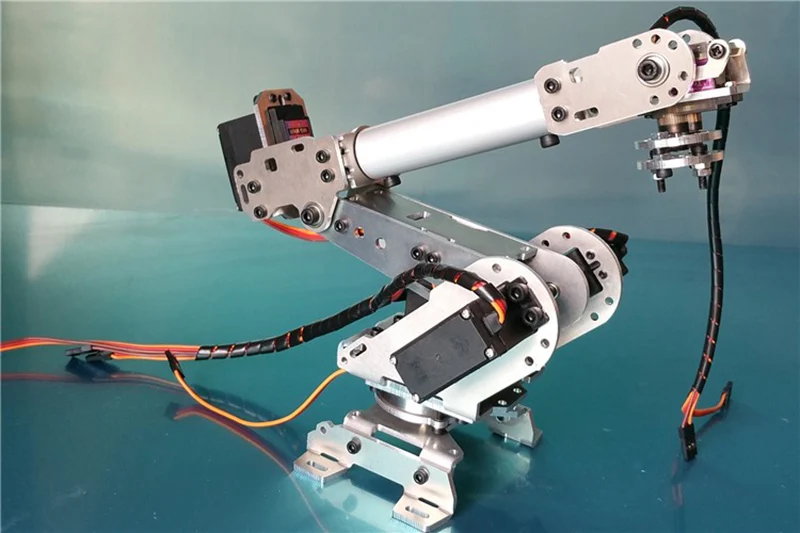
‘M_Out(5)=0 ‘futószalag leáll nullázással kezdünk
‘M_Out(6)=0 ‘futószalag leáll nullázással kezdünk
‘M_Out(8)=0 ‘másik futószalag előre leáll
‘M_Out(9)=0 ‘másik futószalag előre leáll
‘
‘M_Out(5)=1 ‘összeszerelő ág futószalag hátra indul
‘M_Out(5)=0 ‘összeszerelő ág futószalag leáll
‘M_Out(6)=1 »összeszerelő ág futószalag előre indul
‘M_Out(6)=0 »összeszerelő ág futószalag előre leáll
‘M_Out(8)=1 ‘visszavezető ág futószalag hátra indul
‘M_Out(8)=0 ‘ visszavezető ág futószalag hátra leáll
‘M_Out(9)=1 ‘ visszavezető ág futószalag előre indul
‘M_Out(9)=0 ‘ visszavezető ág futószalag előre leáll
‘
‘induktívok
‘Wait M_In(4)=1 ‘addig vár, amíg az első induktív nem érzékel
‘Wait M_In(5)=1 ‘addig vár, amíg az indító induktív nem érzékel
‘Wait M_In(6)=1 ‘addig vár, amíg az visszavezető induktív nem érzékel
‘Wait M_In(7)=1 ‘addig vár, amíg az harmadik(összeszerelő ág vége) induktív nem érzékel
Шаг 9.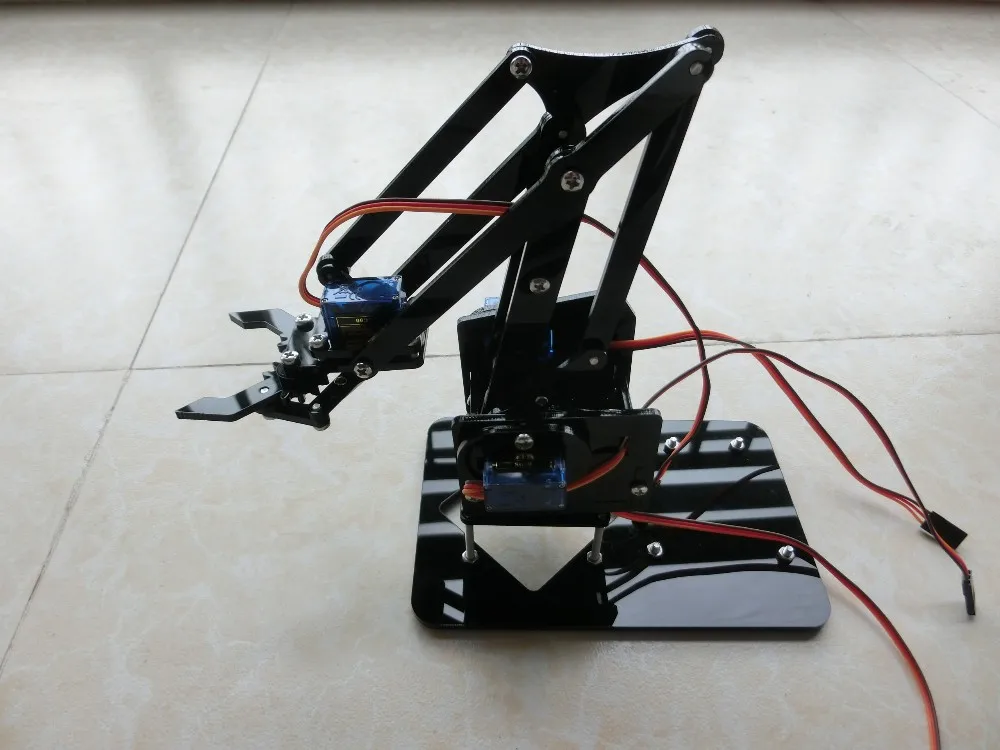 Заключение:
Заключение:
На этой стадии проект завершен. Спасибо за внимание. Надеемся, вам понравился этот робот.
Статья — роботизированная рука манипулятор
Рука манипулятор для человекоподобного робота RKP-Rh201-3D позволяет производить захват предметов по принципу пятипалой человеческой руки с дальнейшим их удержанием, перемещением в пространстве относительно любой плоскости или переносом.
Также возможно использование сжатого в кулак манипулятора RKP-Rh201-3D для динамического воздействия на внезапно возникшее впереди или сбоку препятствие или на соперника в боях роботов.
Роботом называют автоматическое устройство, имеющее манипулятор — механический аналог человеческой руки — и систему управления этим манипулятором. Обе эти составные части могут иметь различное устройство — от очень простого до чрезвычайно сложного.
Манипулятор обычно состоит из шарнирно соединенных звеньев, как рука человека состоит из костей, связанных суставами, и заканчивается охватом, который является чем-то вроде кисти человеческой руки.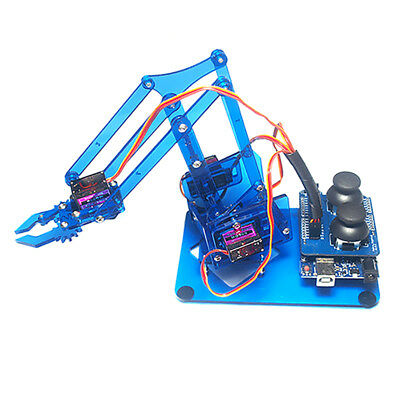 Роль связок в кисти манипуляторе выполняют специальные связки из нейлона. Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Роль связок в кисти манипуляторе выполняют специальные связки из нейлона. Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Вид тыльной стороны ладони человекоподобного робота RKP-Rh201-3D. В пальцах хорошо видны нейлоновые сухожилия (смотри Рис. 1).
Перемещение звеньев манипулятора обеспечивают так называемые приводы или сервомеханизмы (сокращенно серво) — аналоги мускулов в руке человека.
Обычно в качестве таковых используются сервоприводы, которые включают в себя: редуктор (систему зубчатых передач для снижения числа оборотов электродвигателя серво и для увеличения вращающего момента) и электрическую схему управления серво, регулирующую направление и скорость вращения электродвигателя.
В роботизированной руке RKP-Rh201-3D установлен один серводвигатель большой мощности для того, чтобы быстро сжимать и разжимать всю кисть робота (все пять пальцев манипулятора в виде руки). Это хорошо применимо в боевых роботах для нанесения различных ударов, но также возможна компоновка кисти руки робота, при которой каждым пальцем будет управлять отдельный сервопривод весом 9 грамм, например, рулевая машинка TowerPro 9 Gram SG90.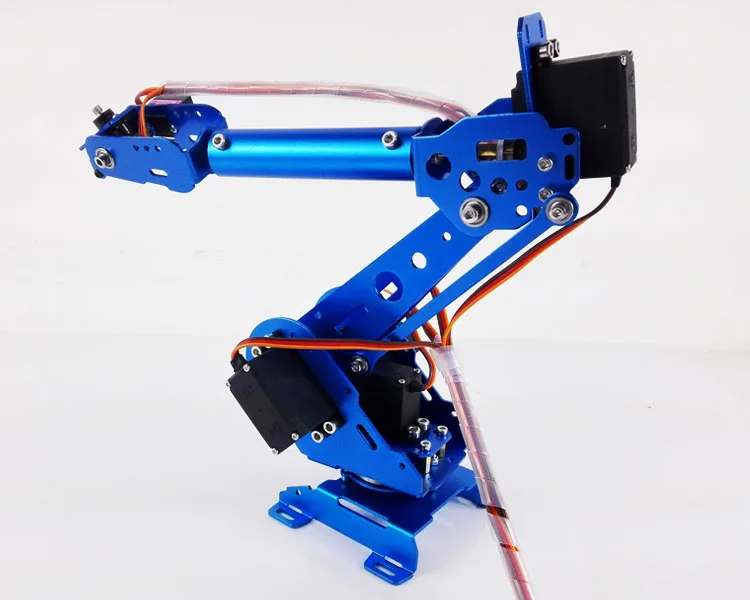
Вид на внутреннюю часть ладони человекоподобного робота RKP-Rh201-3D. Ладонь кисти человекоподобного робота зажата на 50%. (смотри Рис. 2).
В таком случае возможны сложные движения кисти человекоподобного робота, но программирование при этом становится более сложным, интересным и захватывающим. При этом на каждом из пальцев кисти руки человекоподобного робота возможна установка дополнительных разнообразных датчиков и сенсоров, управляющих различными процессами.
Таково в общих чертах устройство манипулятора RKP-Rh201-3D. Что касается сложности задач, которые может разрешать тот или иной робот, оборудованный различными манипуляторами, заменяющими ему руки, то они во многом зависят от сложности и совершенства управляющего устройства.
Принято говорить о трех поколениях роботов: промышленных, адаптивных и роботах с искусственным интеллектом. Но какой бы робот не проектировался ему не обойтись без рук манипуляторов для выполнения различных задач. Звенья манипулятора подвижны друг относительно друга и могут совершать вращательные и поступательные движения. Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Общий вид человекоподобного боевого робота на сервоприводах с кистями рук RKP-Rh201-3D (смотри Рис. 3).
Best Online Electronic Products Bangalore
Нажмите, чтобы увеличить
₹697,63 (без учета всех налогов)
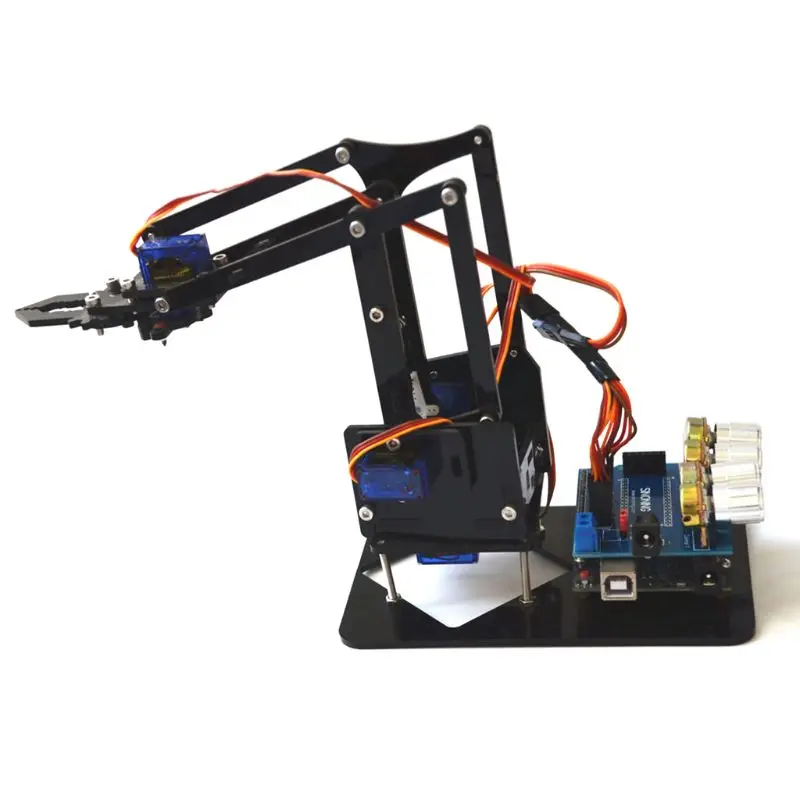
- Степень свободы (DOF): 4
- Материал: Акрил
- Недорогие манипуляторы с 4 степенями свободы.
- Универсальные механические детали.
- Лазерная резка деревянных досок с высокой точностью.
- Простота сборки.
- Цвет: Синий
Ссылка клиента:
DIY акриловый робот-манипулятор механическая рука комплект количество
Лучший продукт
Сравнить
Добавить в список желаний
Артикул: ST2101RO0195
Категории: Комплект шасси, Робототехника
Теги: шасси, комплект шасси, шасси электроники, металлическое шасси, робот, шасси робота, комплекты роботов, шасси робота, Transparent, Transparent Robot Smart Car Chassis Kit, шасси автомобиля
- Описание продукта
- ИНФОРМАЦИЯ О ТОВАРЕ
- информация о доставке
- Перевозка и доставка
Описание продукта
Комплект механической руки для акрилового робота-манипулятора «сделай сам»
Комплект механической руки для акрилового робота-манипулятора «сделай сам» (без сервопривода и платы) Это акриловый робот-манипулятор, изготовленный своими руками (без сервопривода и платы).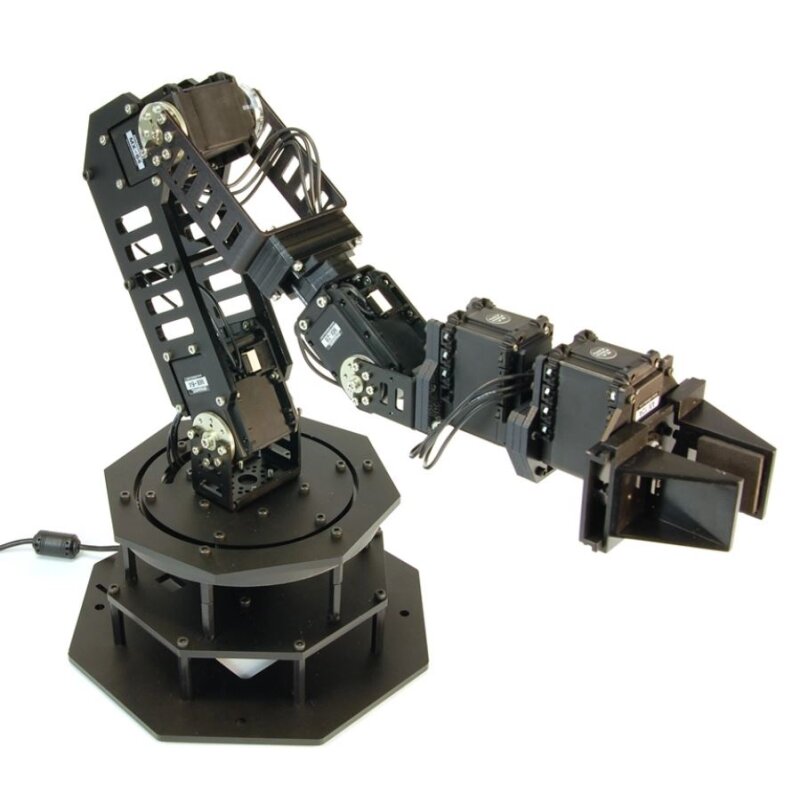 Рука имеет 4 степени свободы. Механические части точно вырезаны лазером и универсальны в использовании.
Рука имеет 4 степени свободы. Механические части точно вырезаны лазером и универсальны в использовании.
Примечание:
Механическая рука робота-манипулятора не собрана со всеми необходимыми деталями, присутствующими в комплекте. Также в комплект не входят серводвигатели, платы контроллеров и другие аксессуары.
Характеристики/характеристики:
- Степень свободы (DOF): 4
- Материал: Акрил
- Недорогие манипуляторы с 4 степенями свободы.
- Универсальные механические детали.
- Лазерная резка деревянных досок с высокой точностью.
- Простота сборки.
- Цвет: Синий
- Длина: 155 мм
- Ширина: 95 мм
- Высота: 20 мм
- Вес: 145 г
В комплект входит:
- 1 x DIY акриловый робот-манипулятор с механической рукой.
- 1 комплект винтов.
Примечание. Изображения продуктов приведены только в иллюстративных целях и могут отличаться от фактического продукта.
ИНФОРМАЦИЯ О ПРОДУКТЕ
Информация об отгрузке
Доставка
Мы делаем все возможное, чтобы добраться до каждого уголка Индии, используя несколько лучших курьерских служб, работающих в стране, таких как FedEx, Delhivery, DTDC, BlueDart, XpressBees. , Ecom Express и т.д. по отзывам для курьера-партнера по месту нахождения заказчика. Некоторые внутренние районы Индии, которые не покрываются этими курьерскими службами, покрываются нами через India-Post. Мы ежедневно прилагаем все усилия, чтобы отправить заказ в тот же день, когда он был заказан, или в течение следующих 24 часов с момента размещения заказа. Большинство заказов, размещенных до 13:00, отправляются и отправляются в тот же день. Заказы размещаются почтой, которая запланирована на отгрузку на следующий день. Такие же усилия прилагаются в течение всей недели, включая будни, а иногда и выходные и праздничные дни. Мы обеспечиваем местный самовывоз (самовывоз для местных клиентов) в будние дни и частично в выходные дни.
Мы обеспечиваем местный самовывоз (самовывоз для местных клиентов) в будние дни и частично в выходные дни.
Вам также может понравиться…
Что такое концевой эффектор и как его использовать?
РАЗМЕЩЕН 04.09.2020
Роботизированные системы могут показаться довольно сложными при первом использовании. Большинству роботов требуется целый набор аксессуаров и надстроек, прежде чем вы сможете использовать их для любых задач в своем бизнесе.
Концевые эффекторы могут быть особенно сложными для понимания. На рынке существуют буквально сотни различных концевых эффекторов от разных производителей.
Что еще больше сбивает с толку, так это то, что многие концевые эффекторы выглядят почти одинаково, но имеют совершенно разные характеристики.
В этом кратком руководстве мы разъясним некоторые основы концевого эффектора и дадим советы.
Что такое концевой эффектор?
Конечный эффектор — это периферийное устройство, которое прикрепляется к запястью робота и позволяет роботу взаимодействовать со своей задачей.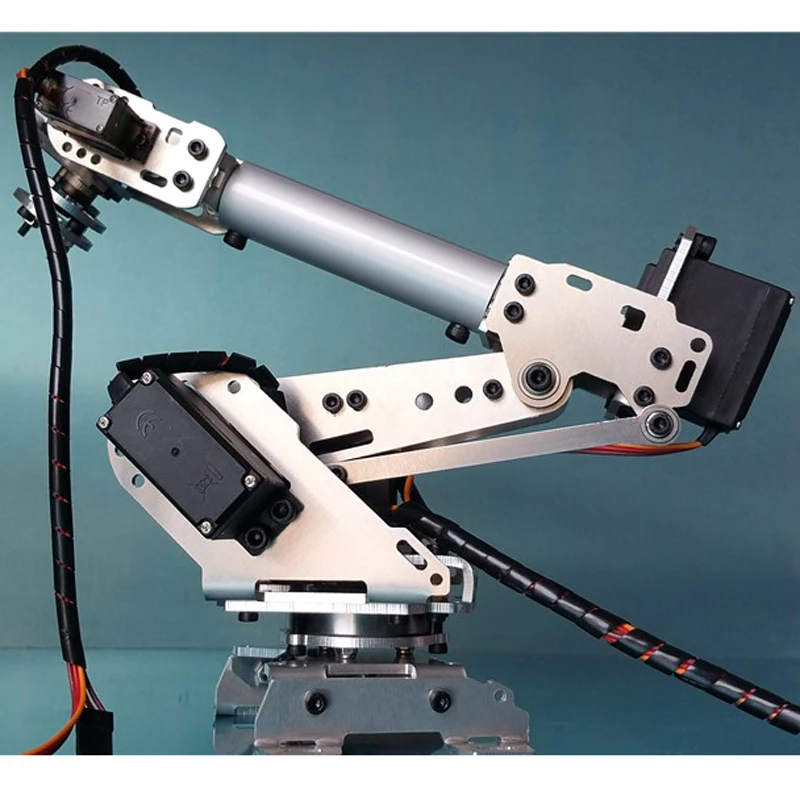 Большинство концевых эффекторов являются механическими или электромеханическими и служат захватами, технологическими инструментами или датчиками. Они варьируются от простых захватов с двумя пальцами для задач захвата и размещения до сложных сенсорных систем для роботизированной инспекции.
Большинство концевых эффекторов являются механическими или электромеханическими и служат захватами, технологическими инструментами или датчиками. Они варьируются от простых захватов с двумя пальцами для задач захвата и размещения до сложных сенсорных систем для роботизированной инспекции.
Также может использоваться термин «Инструменты на конце руки» (EOAT).
По сути, рабочий орган — это «деловая часть робота».
Без концевого эффектора большинство роботов практически бесполезны. Шарнирно-сочлененная роботизированная рука может быть запрограммирована на определенное место в пределах своего рабочего пространства, но без какого-либо концевого эффектора она не сможет выполнить какую-либо операцию.
3 основных типа концевого зажима
Существует так много различных типов концевых эффекторов, что было бы почти невозможно (или, по крайней мере, бесполезно) перечислить их здесь. Тем не менее, есть 3 основных типа, с которыми вы, вероятно, столкнетесь в большинстве ситуаций.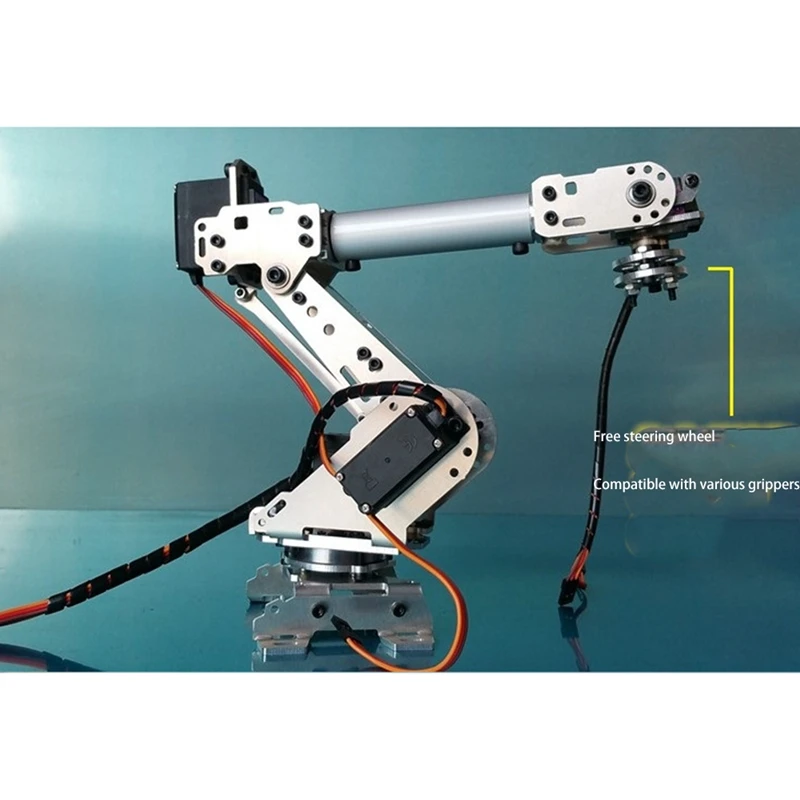
Эти типы:
1. Захваты
Наиболее распространенным концевым эффектором робота является скромный захват. Он позволяет вам брать предметы и манипулировать ими, что делает его наиболее подходящим для таких задач, как захват и размещение, сборка и обслуживание машин.
Возможно, существует больше различных типов захватов, чем любых других типов концевых зажимов. Безусловно, самыми популярными являются захваты с пальцами, которые бывают с 2, 3, 4 или 5 пальцами — можно использовать 6 пальцев или больше , но это редко бывает необходимо.
Кроме того, существуют вакуумные захваты, магнитные захваты, игольчатые захваты, а также постоянно разрабатываются удивительные новые технологии захватов.
2. Технологические инструменты
Упрощенно думать о технологических инструментах можно как о работнике, работающем с электроинструментом. В то время как захват может только захватывать заготовку, обрабатывающий инструмент фактически изменяет заготовку.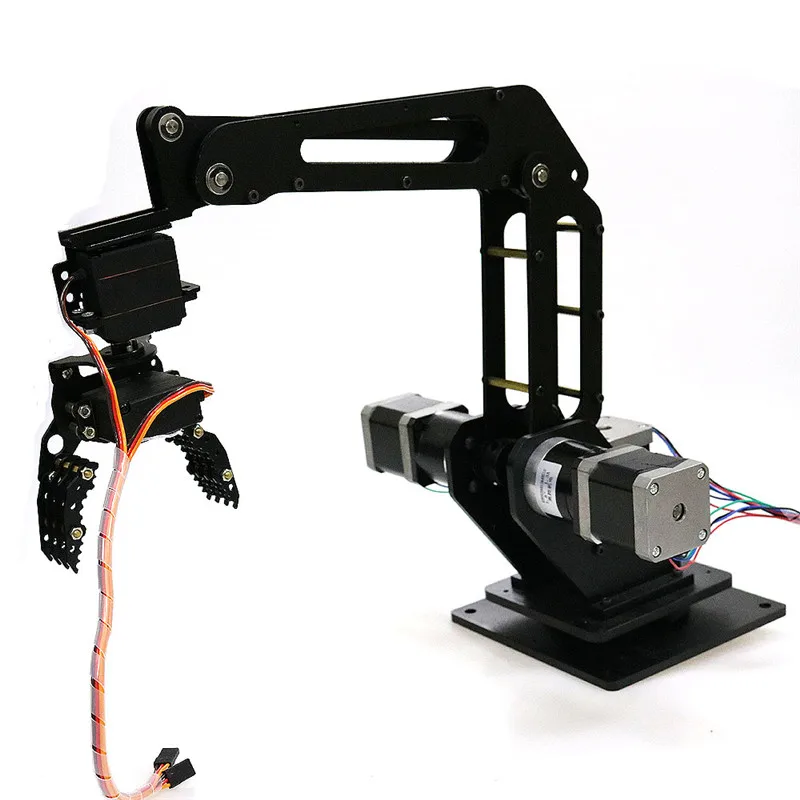
Существует столько же различных технологических инструментов, сколько и различных операций в производстве. Примеры включают инструменты для роботизированной сварки, инструменты для роботизированной обработки, инструменты для рисования роботов, инструменты для 3D-печати, и этот список можно продолжать и продолжать.
Если вы можете сделать это с помощью электроинструмента, вы, вероятно, сможете сделать это с помощью робота.
Если вы можете сделать это с помощью другой автоматической машины, возможно, вы сможете сделать это и с роботом.
3. Датчики
Вы также можете прикрепить датчик, чтобы использовать робота в качестве программируемого устройства ориентации датчика. Это особенно полезно для таких приложений, как роботизированная инспекция , которые сокращают количество времени, затрачиваемого инженерами-инспекторами на сбор данных.
Многие датчики могут служить конечными эффекторами, включая ультразвуковые датчики, лазерные сканеры, 2D- и 3D-камеры и инфракрасные датчики (например, используемые в НАСА).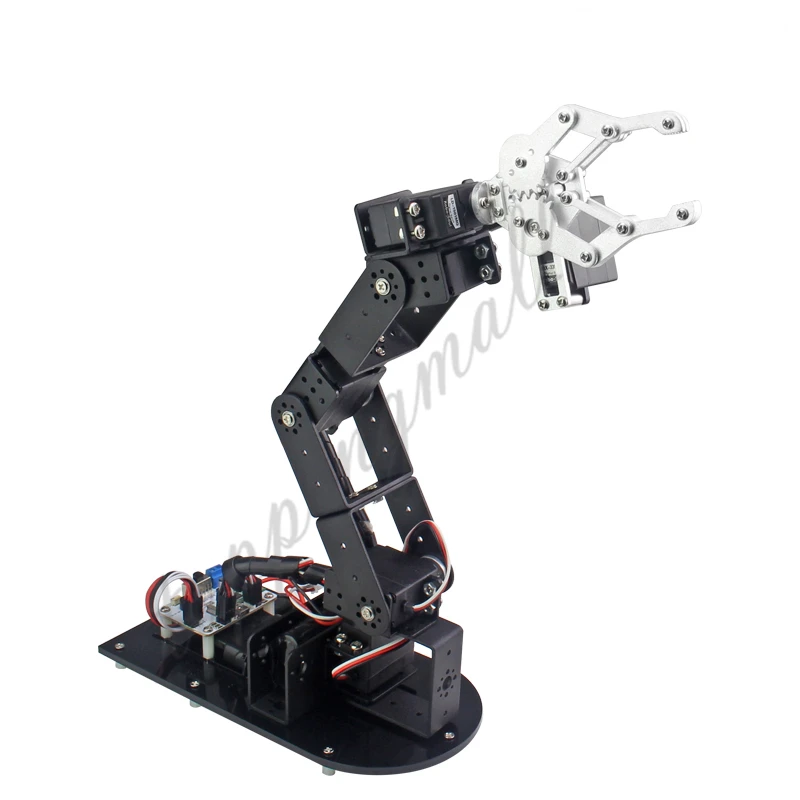
Дополнительно: устройства смены инструмента
Хотя технически устройства смены инструмента сами по себе не классифицируются как концевые эффекторы, они также прикрепляются к концу робота — между запястьем и концевым эффектором. Они позволяют роботу автономно переключаться между различными инструментами.
Какой концевой эффектор вам подходит?
Существует так много различных концевых эффекторов, что может быть довольно сложно понять, какой из них лучше всего подходит для вашего конкретного приложения.
Следует ли использовать захват? Если да, то какой тип лучше и какие характеристики ему нужны? Или вам лучше выбрать инструмент процесса? Который из?
К сожалению, ответ на самом деле… это зависит от обстоятельств.
Чтобы определить, какой рабочий орган лучше всего подходит для вашего приложения, вам нужно сделать шаг назад и спросить себя: Чего мы пытаемся достичь этой задачей?
Выбор правильного концевого эффектора
Когда вы переориентируетесь на цель задачи, выполните следующие действия:
- Определите, какие действия робот должен выполнить для выполнения задачи.
- Составьте краткий список различных типов конечных эффекторов, которые могут выполнять эти действия.
- Оцените каждый тип по стоимости, сложности и любым другим важным факторам.
- Наконец, выберите концевой эффектор, который лучше всего подходит для этой конкретной задачи.
Существует несколько способов выполнения одной и той же задачи с использованием разных концевых эффекторов роботов.
Например, подумайте о задаче рисования распылением.
С одной стороны, вы можете установить на запястье робота концевой эффектор для окраски распылением в качестве технологического инструмента, что было бы просто сделать.
С другой стороны, вы можете использовать захват для захвата пистолета-распылителя, что позволит роботу быстро перейти к другой задаче и не потребует специального концевого эффектора.
Оба варианта неверны, все зависит от того, что вам нужно.
Как использовать концевой эффектор с вашим роботом
Каждый концевой эффектор работает немного по-разному.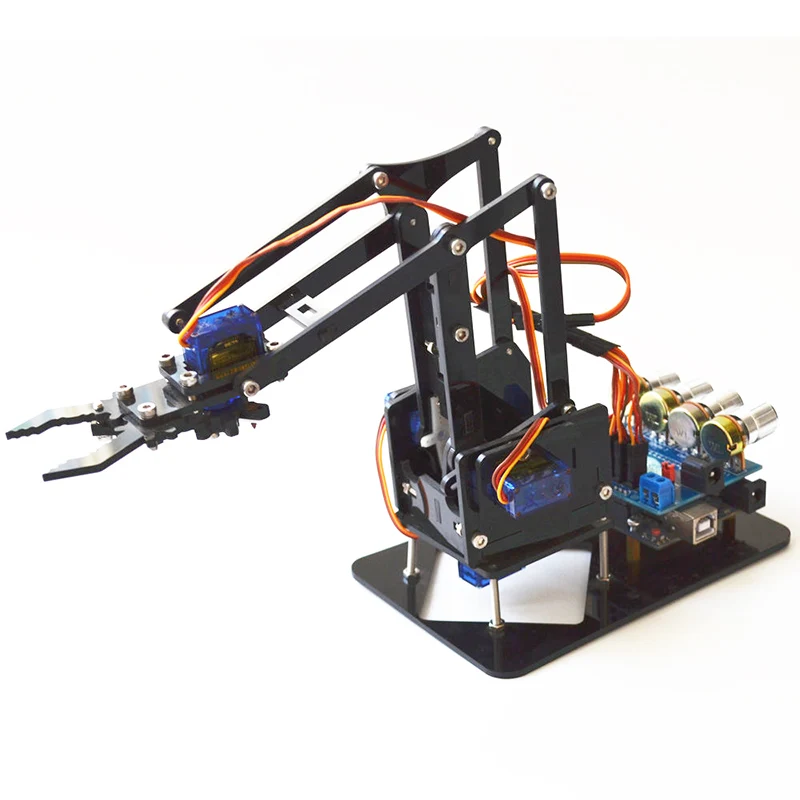
Всего комментариев: 0