Что такое асинхронные двигатели: схема, принцип работы и устройство
Содержание
схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
Недостатки:
Преимущества фазного:
Недостатки:
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
Тем не менее, у асинхроников есть недостатки. А именно:
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
Как избежать снижения КПД?
Для этого используются:
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Вам может быть интересно
Электродвигатель асинхронный А4-400Х-10У3
Электродвигатель асинхронный 2АОД-500/250-10/12 У1
Электродвигатель асинхронный ДАЗО4-400У-10
Электродвигатель взрывозащищенный ВАО7-450 M-6
Асинхронный двигатель — принцип работы и устройство
Асинхронный двигатель
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
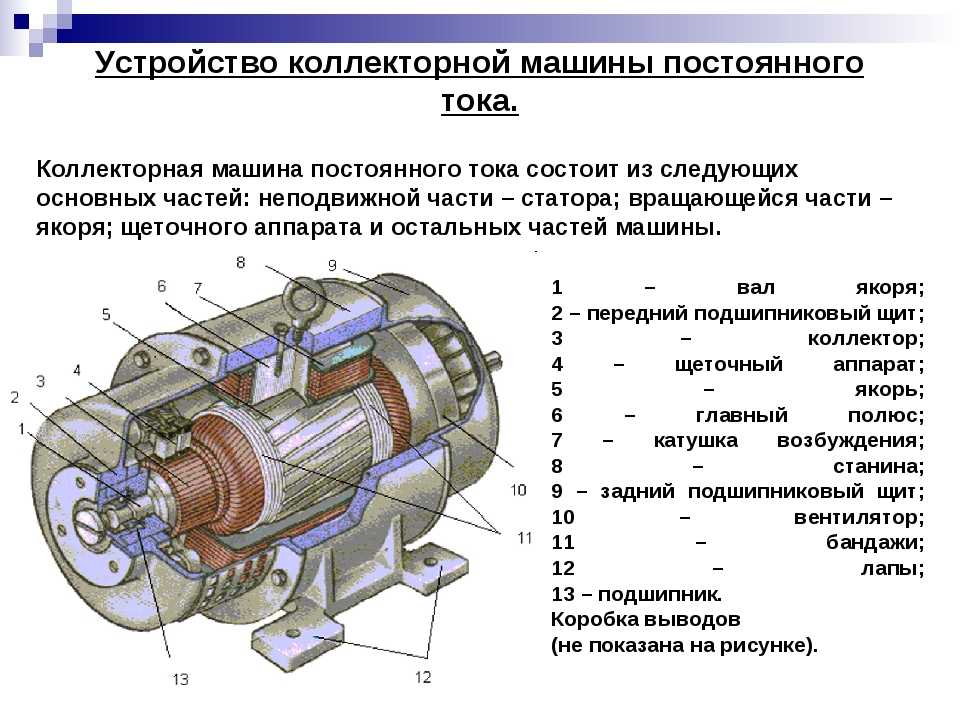
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению — однофазный асинхронный двигатель.
В чем разница между асинхронными и синхронными двигателями?
Загрузите эту статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики двигателя. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации мотора. Среди классических примеров этого явления — асинхронные и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Более конкретное объяснение того, как возникает это скольжение, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), называемый беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов проводящими кольцами, которые электрически закорачивают стержни друг с другом. Сплошной сердечник ротора состоит из пакетов пластин из электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубьев ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, роторы которых состоят из обмоток, а не из беличьей клетки. Суть этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средства снижения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного соединения каждой обмотки ротора с резистором. Обмотки получают ток через какое-то контактное кольцо.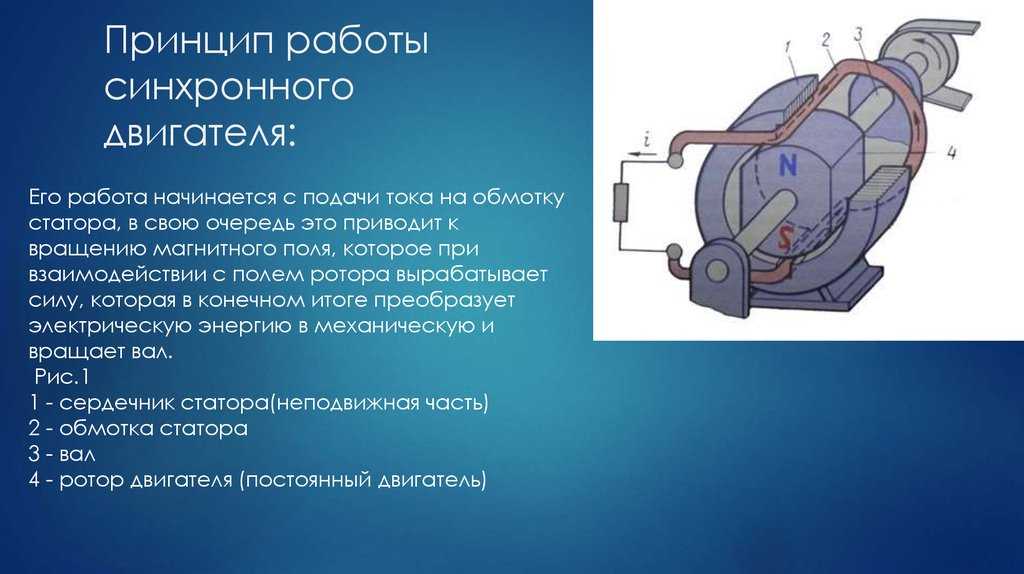 Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к сети переменного тока. Приложение напряжения к статору вызывает протекание тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила возникает, когда петля провода перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Величина скольжения может варьироваться. Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда переменный ток изначально подается на статор, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и в статоре. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r , капли. Если f — частота напряжения статора, то скольжение, с, связывает два через f r = с f . Здесь s выражается в виде десятичной дроби.
Когда ротор стоит на месте, ротор и статор эффективно образуют трансформатор.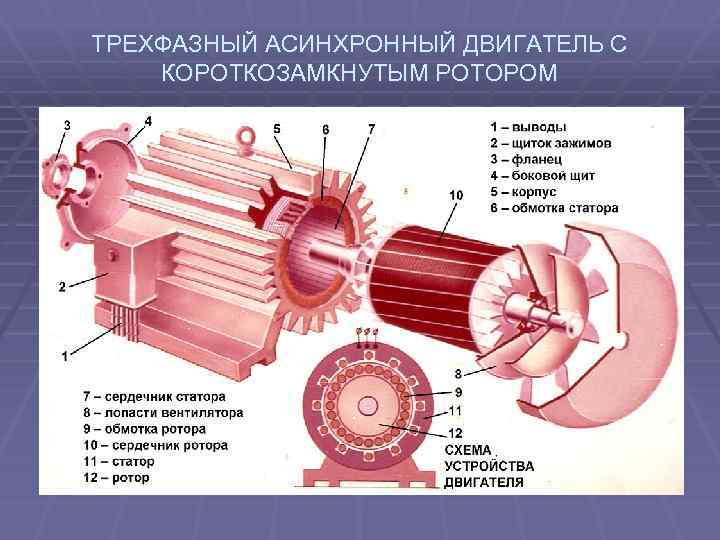 Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и Ñ„ м = максимальный магнитный поток, Webers. Thus, the voltage E r induced while the rotor spins depends on the slip:
E r = 4.44 s f N Ñ„ m = s E
Описание синхронных двигателей
Синхронный двигатель имеет специальную конструкцию ротора, которая позволяет ему вращаться с той же скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением. Однако недавние достижения в области схем управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, воздуходувки и ведущие мосты во внедорожных транспортных средствах.
В основном существует два типа синхронных двигателей:
• С самовозбуждением — Принципы аналогичны асинхронным двигателям, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Синхронный двигатель с самовозбуждением , также называемый вентильным реактивным двигателем, содержит стальной литой ротор с прорезями или зубьями, получившими название явно выраженных полюсов. Именно выемки позволяют ротору зафиксироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки/фазы статора аналогично шаговому двигателю. Синхронный двигатель с прямым возбуждением может называться по-разному. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. В этой конструкции используется ротор с постоянными магнитами. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Постоянные магниты являются выступающими полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотках статора в нужное время с помощью полупроводниковых переключателей, сводя к минимуму пульсации крутящего момента. Принцип работы всех этих типов синхронных двигателей в основном одинаков. Энергия подается на катушки, намотанные на зубья статора, которые создают значительный магнитный поток, пересекающий воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубцом статора, крутящий момент не возникает. Если зубец ротора находится под некоторым углом к зубу статора, по крайней мере часть потока пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Еще один тип синхронного двигателя называется вентильным реактивным двигателем (SR).
Его ротор состоит из стальных пластин с набором зубьев. Зубцы магнитопроницаемы, а окружающие их участки слабопроницаемы в силу прорезанных в них пазов. Таким образом, ротору не нужны обмотки, редкоземельные материалы или магниты.
В отличие от асинхронных двигателей, в роторе отсутствуют стержни ротора и, следовательно, в роторе не протекает ток, создающий крутящий момент. Отсутствие проводника какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях с роторами, несущими проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем модуляции крутящего момента (посредством тока обмотки).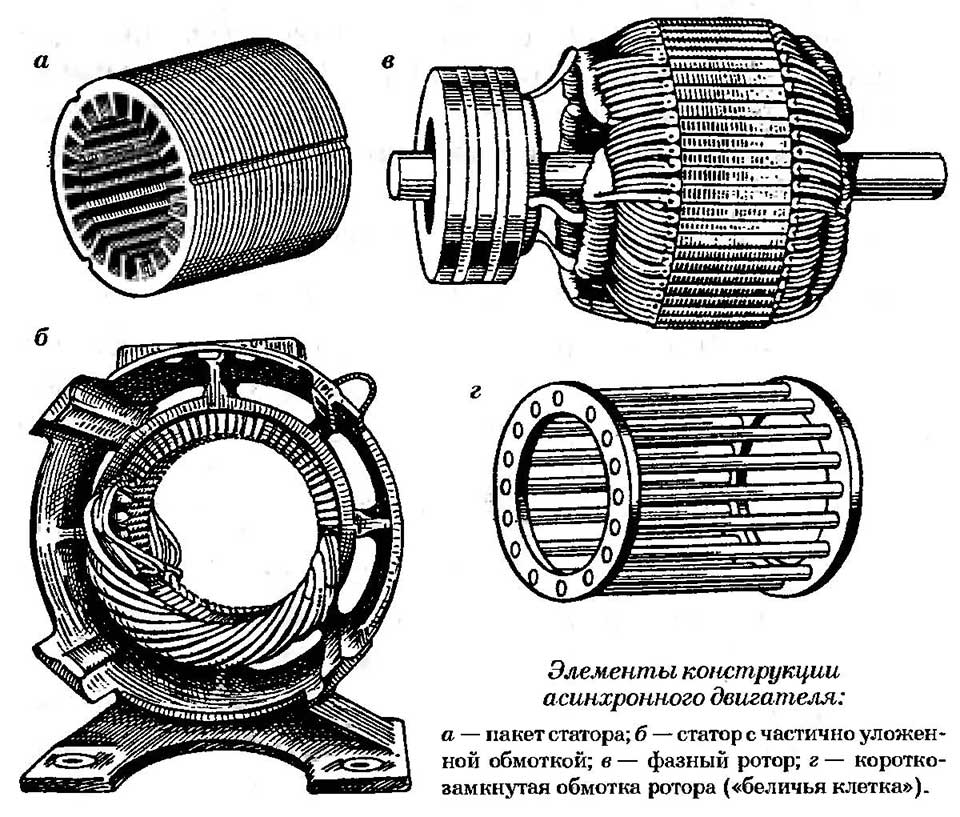 Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Производство крутящего момента не зависит от скорости двигателя. Это отличается от асинхронных двигателей переменного тока, где при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения оборотов двигателя.
Основное различие между синхронным и асинхронным двигателем
Электрические двигатели представляют собой машины, преобразующие электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели. Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и принцип их работы. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, связанную с работой однофазных и трехфазных двигателей переменного тока.
- Связанная запись: Разница между однофазным и трехфазным асинхронным двигателем
Как работает двигатель переменного тока?
Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу действия магнитного поля на проводник с током, который испытывает механическую силу. Где статор создает статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея RMF вращательного магнитного поля. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче на вход переменного тока. Это магнитное поле вращается вокруг ротора.
Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток через индукцию или внешний источник тока, генерирующий собственное магнитное поле. Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью вращения ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью вращения поля статора и ротора, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Похожие сообщения:
- Разница между двигателями переменного и постоянного тока
- Разница между генератором переменного и постоянного тока
Синхронный двигатель
Как следует из названия, ротор синхронного двигателя предназначен для вращения с той же скоростью, что и его магнитное поле, вращающееся в статоре, называемое синхронной скоростью .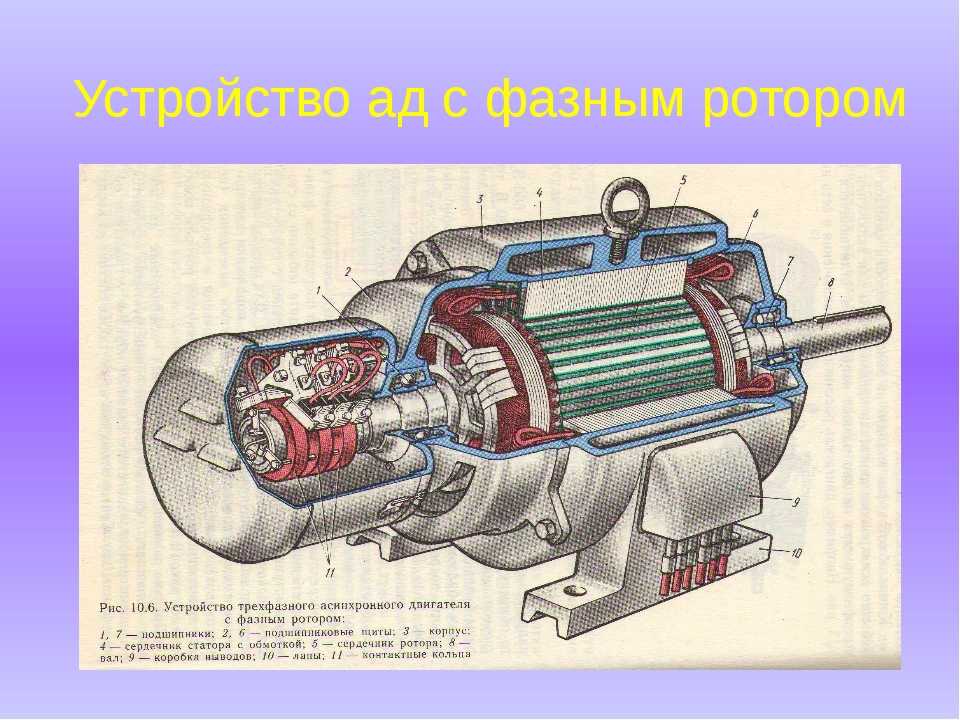
Статор создает вращающееся магнитное поле при подаче переменного тока. Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с помощью внешний источник постоянного тока через токосъемные кольца или постоянный магнит .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется вращательным магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не сразу запускается на синхронной скорости (вращательное магнитное поле). Поэтому дополнительная обмотка под названием « Демпферная обмотка ” служит для обеспечения пускового момента. Он действует как асинхронный двигатель во время запуска. Таким образом, это говорит о том, что синхронные двигатели не являются самозапускающимися , им нужен дополнительный пусковой механизм.
Это может быть двигатель с отдельным возбуждением или без него, т. е. первый требует отдельного источника постоянного тока, питает обмотки ротора и создает магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты сети и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания. Это достигается с помощью VFD (частотно-регулируемый привод).
Похожие сообщения:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Асинхронный двигатель
Название асинхронного двигателя предполагает, что скорость вращения ротора асинхронна со скоростью вращения магнитного поля статора. Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах с помощью проводящего кольца, которое электрически замыкает их друг на друга. Ротор витого типа состоит из нескольких обмоток поверх стального многослойного сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его создает, и пытается устранить ее, догоняя скорость RMF статора (синхронная скорость). При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель 9. 0054 .
0054 .
Асинхронный двигатель никогда не может работать на синхронной скорости, он всегда медленнее синхронной скорости и зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если, в случае, если он работает на синхронной скорости, это означает, что ротор магнитно заблокирован, и между статором и полем ротора нет разницы. Следовательно, не было бы магнитного потока, индуцирующего ток в роторе. Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать на более низкой скорости, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет индуцированному току протекать через медные стержни. В то время как ротор с обмоткой позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Моторном пускателе». Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем.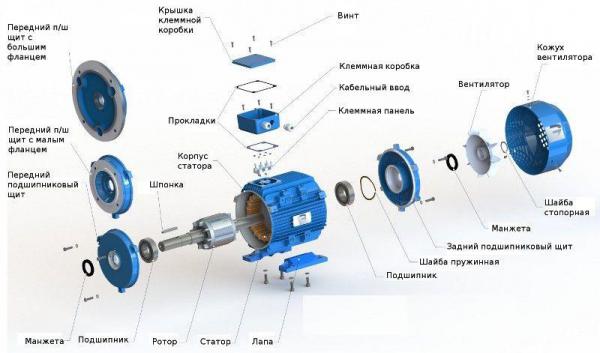 Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое зависит от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанный пост:
- Разница между трансформатором и асинхронным двигателем
- Разница между генератором переменного тока и генератором
Различия между синхронным двигателем и асинхронным двигателем
В следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
Синхронный двигатель представляет собой тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это двигатель переменного тока, который работает на скорости ниже синхронной. |
| Работает по принципу магнитной блокировки между полем ротора и статора. | Работает по принципу электромагнитной индукции между статором и ротором. |
| Скольжения нет, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе имеется скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты сети и количества полюсов статора. N с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) Н < Н с |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускающиеся и не требуют дополнительного механизма. |
| Для ротора требуется дополнительный источник тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронный двигатель с независимым возбуждением требует дополнительного источника постоянного тока для питания обмотки ротора. | Не требует дополнительного источника. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует токосъемных колец, однако в витом типе можно использовать токосъемные кольца для контроля скорости. |
| Скорость двигателя регулируется только путем изменения частоты питания через ЧРП. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств ЧРП. |
Подача входного напряжения не влияет на скорость или крутящий момент синхронного двигателя. | Источник входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания сетевого напряжения не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Первоначальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Это операция сложная. | Это операция проста и удобна для пользователя. |
| If обеспечивает высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Довольно сложно работать на низкой скорости. |
| Лучше всего работает при низкой скорости, обычно ниже 300 об/мин. | Лучше всего подходит для работы на скорости выше 600 об/мин. |
Он может работать с отстающим, опережающим или единичным коэффициентом мощности путем регулировки возбуждения. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в опережающем коэффициенте мощности. | Его нельзя использовать для коррекции коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, внезапные изменения нагрузки вызовут колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая функцию коррекции коэффициента мощности. С другой стороны, асинхронные двигатели используются для высоких оборотов с переменной скоростью, они недороги и просты в эксплуатации.
Связанный пост об электрических двигателях.
- Машина постоянного тока – конструкция, работа, типы и применение
- Управление скоростью двигателя постоянного тока – методы управления напряжением, реостатом и магнитным потоком
- Расчет размера кабеля для двигателей LT и HT.
Всего комментариев: 0