Рука манипулятор: Робот манипулятор купить в Москве
Содержание
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm / Хабр
Привет, гиктаймс!
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки.
 Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания - Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
… и 3мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм.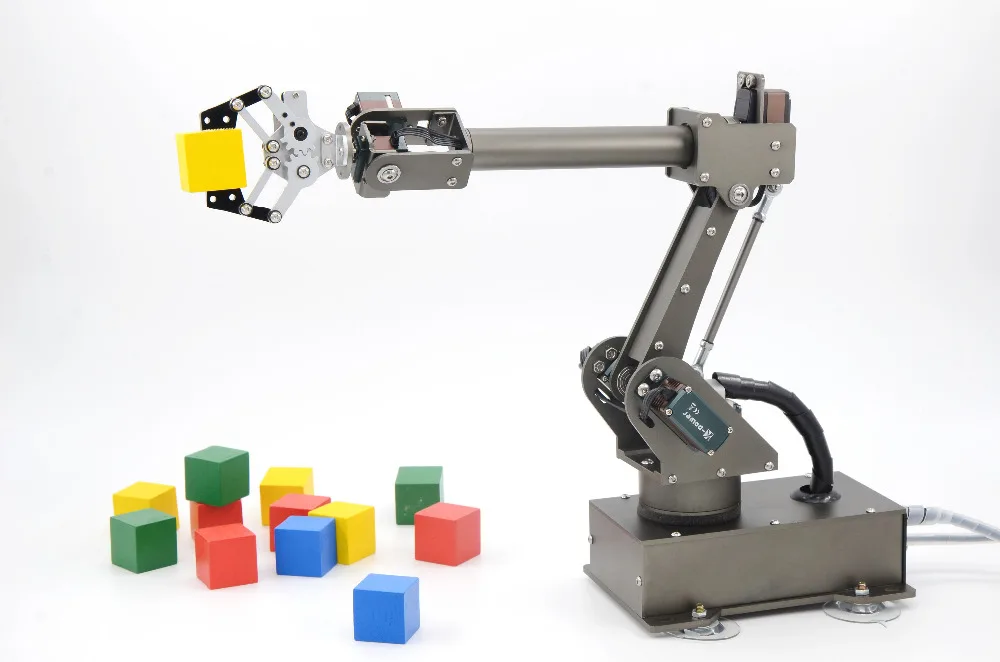 Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
Робот-манипулятор: назначение и конструкция
Робот-манипулятор представляет собой управляемое устройство, движения которого повторяют действия человеческой руки. Именно поэтому такие аппараты зачастую называют «рука-робот» или «рука-манипулятор».
Первый робот манипулятор создавался для выполнения задач машиностроения. Однако позднее аппараты стали применяться во многих других отраслях промышленности.
«Руки-роботы» позволяют:
-
В разы увеличить производительность труда -
Обеспечить бесперебойную работу конвейера в течение длительного времени -
Снизить издержки -
Не использовать человеческий труд на опасных или вредных производствах -
Повысить точность и четкость выполнения монотонных операций, снизить влияние человеческого фактора. За счет этого также увеличивается качество продукции -
Рационально использовать производственное пространство
Основным рабочим элементом робота-манипулятора является инструмент, с помощью которого выполняется возложенная на него функция. Этот может быть устройство захвата, которое напоминает человеческую кисть с пальцами, или другое технологическое оборудование (например, для сборки техники).
Этот может быть устройство захвата, которое напоминает человеческую кисть с пальцами, или другое технологическое оборудование (например, для сборки техники).
«Схват» является наиболее распространенным, но не единственным аппаратом, облегчающим перемещение объектов. Для плоских поверхностей используются присоски, для сыпучих смесей – ковши и так далее.
Основание или «запястье» робота обеспечивает перемещение рабочего элемента. В современных манипуляторах среднее число подвижных узлов достигает шести.
Точность и долговечность работы подвижных механизмов манипуляторов зависит от качества их обработки.
Для повышения точности позиционирования элементов на конвейере, а также увеличения надежности и срока службы роботов-манипуляторов в целом на шестерни рулевых механизмов наносят антифрикционные твердосмазочные покрытия MODENGY 1005 и MODENGY 1066.
Благодаря снижению и стабилизации коэффициента трения, а также предотвращению скачкообразного движения сопряженных элементов повышается ресурс и эффективность работы сборочных аппаратов.
Для придания движения установке необходимы приводные механизмы. Они могут быть пневматическими, гидравлическими и электрическими (наиболее распространенный вид привода).
Также робот манипулятор оснащается различными датчиками и измерительными приборами, которые помогают ему в работе.
Проектирование и разработка робота манипулятора требуют особой точности, так как аппараты, особенно сборочные, работают с мелкими деталями.
Помимо основных элементов конструкции разрабатывается программное обеспечение робота, система управления и контроля и другие важные механизмы, без которых работа манипулятора невозможна.
Только точные математические расчеты и безошибочная процедура производства могут гарантировать корректную работу приспособлений.
Именно по этой причине в мире не так много компаний, занимающихся разработкой манипуляторов. Подавляющее большинство компаний-разработчиков и экспортеров таких роботов расположено в Японии.
Подавляющее большинство компаний-разработчиков и экспортеров таких роботов расположено в Японии.
Что касается распределения по областям промышленности, наибольшее количество устройств производится для нужд автомобильной, электротехнической, металлообрабатывающей и машиностроительной отраслей.
Возврат к списку
Что такое рука манипулятора, ее использование и захват?
25 января 2021 г.
Мы слышали о роботах, роботизированных руках и механических руках, но некоторые могут быть не знакомы со словом «манипулятор». Что такое рука-манипулятор? Похожая рука, как рука робота?
What — M Anipulator A RM A RM 0010 ?
В робототехнике рука-манипулятор или роботизированная рука — это тип механической руки, обычно программируемой, с функциями, аналогичными человеческой руке; рука может быть суммой всего механизма или может быть частью более сложного робота.
С точки зрения промышленности, манипулятор — это вспомогательное подъемное устройство, используемое для того, чтобы помочь рабочим поднимать, маневрировать и размещать в процессе работы предметы, которые слишком тяжелые, слишком горячие, слишком большие или слишком трудные для ручной обработки одним рабочим.
Для чего нужен манипулятор?
Так как манипуляторы предназначены для облегчения перемещения грузов с одного места на другое, которые слишком тяжелы для рабочего или непригодны для захвата, они в основном используются для манипулирования материалами без непосредственного физического контакта оператора.
Первоначально он использовался для работы с радиоактивными или биологически опасными материалами или использовался в труднодоступных местах. С развитием технологий и их применением, они стали широко использоваться в самых разных областях, включая автоматизацию сварки, роботизированную хирургию и космос. Это рычагообразный механизм, состоящий из ряда сегментов, обычно скользящих или соединенных, называемых поперечными салазками, которые захватывают и перемещают объекты с рядом степеней свободы.
В отличие от простого вертикального подъема (краны, подъемники и т. д.), манипулятор позволяет проникать в труднодоступные места и извлекать заготовки. Хорошим примером может быть извлечение крупных штампованных деталей из пресса и размещение их на стеллаже или подобном приспособлении. При сварке манипулятор колонной стрелы используется для увеличения скорости наплавки, уменьшения человеческих ошибок и других затрат в производственных условиях.
Кроме того, рычаг манипулятора позволяет подъемнику наклонять, катить или вращать деталь для надлежащего размещения. Примером может быть извлечение детали из пресса в горизонтальном положении, а затем ее наклон для вертикального размещения в стойке или перекатывание детали, чтобы обнажить заднюю часть детали.
Захват руки манипулятора
У каждого робота есть рука, и каждая рука требует захвата для выполнения задачи по перемещению. Захват манипулятора, специально разработанный и изготовленный HVR MAG, может использоваться для захвата, подъема, загрузки, размещения и перемещения деталей из черных металлов для линии автоматизации в качестве инструмента на конце манипулятора.
Мы поставляем магнитный захват для руки манипулятора, экономя электроэнергию с большей безопасностью, для магнитного захвата и размещения стальных деталей в автоматике. Схема, разработанная бесплатно, работает, чтобы получить максимальную отдачу от вашего проекта роботизированной обработки. Свяжитесь с нами, чтобы получить предложение, или посетите наш веб-сайт, чтобы узнать больше.
манипулятор захват манипулятора
Вам также может понравиться
Об авторе: hvrmag
типов концевых эффекторов | Вакуумные концевые эффекторы
Механические инструменты
Механические приспособления для подъема идеально подходят для работы с аналогичными деталями. Эти манипуляторы захватывают детали и позволяют оператору безопасно и легко перемещать груз. Наши механические устройства помощи при подъеме обычно могут работать с деталями весом от 25 до 400 фунтов. В некоторых ситуациях вес деталей обеспечивает всю силу захвата, необходимую для подъема тяжелого груза. Механические подъемные механизмы могут быть очень экономичным способом справиться с вашими повседневными потребностями в подъеме грузов.
Механические подъемные механизмы могут быть очень экономичным способом справиться с вашими повседневными потребностями в подъеме грузов.
Инструменты C-образной рамы
Манипуляторы C-образной рамы идеально подходят для работы с объектами квадратной или цилиндрической формы. Эти подъемные устройства зажимают детали с помощью гидравлической или пневматической энергии; и позволяют оператору добраться до обрабатывающего центра или стойки. Они идеально подходят, когда препятствие над головой не позволяет оператору расположить инструмент непосредственно над точкой установки. Наши роботизированные концевые эффекторы C-Frame обычно работают с деталями весом от 25 до 500 фунтов. При работе с тяжелыми грузами наша схема безопасности захвата не позволит оператору высвободить деталь в воздухе. Это делается интуитивно с помощью схемы на инструменте.
Вакуумные инструменты
Вакуумные подъемники идеально подходят для работы с плоскими или слегка изогнутыми непористыми деталями. Эти промышленные концевые эффекторы могут принимать самые разные формы из дверей, окон, коробок, пакетов и круглых слитков материала. Эти эргономичные подъемники доступны с регулируемыми вакуумными присосками, что позволяет оператору поднимать детали разных размеров. В процессе проектирования и утверждения заказчик может запросить различные конфигурации вакуума и функции безопасности. Эти функции включают в себя несколько вакуумных контуров, обратные клапаны на вакуумных присосках и контур сброса нагрузки. Многие из этих вакуумных манипуляторов дают операторам возможность вращать деталь в нескольких различных направлениях.
Эти промышленные концевые эффекторы могут принимать самые разные формы из дверей, окон, коробок, пакетов и круглых слитков материала. Эти эргономичные подъемники доступны с регулируемыми вакуумными присосками, что позволяет оператору поднимать детали разных размеров. В процессе проектирования и утверждения заказчик может запросить различные конфигурации вакуума и функции безопасности. Эти функции включают в себя несколько вакуумных контуров, обратные клапаны на вакуумных присосках и контур сброса нагрузки. Многие из этих вакуумных манипуляторов дают операторам возможность вращать деталь в нескольких различных направлениях.
Разжимной стержень
Разжимной стержень идеально подходит для работы с большими рулонами материала со сплошным внутренним диаметром. Мы предлагаем десятки типов оборудования для обработки стержней, от переносного или стационарного оборудования для обработки рулонов до подъемников на базе лебедки и устройств для поворота рулонов. Все наши стандартные конструкции доступны в различных конфигурациях для самых разных областей применения. Мы предлагаем индивидуальные инженерные услуги, которые дают нам возможность работать с любым приложением. Наши манипуляторы с ID-захватом могут работать с грузами до 1000 фунтов и идеально подходят для безопасного перемещения тяжелых катушек.
Все наши стандартные конструкции доступны в различных конфигурациях для самых разных областей применения. Мы предлагаем индивидуальные инженерные услуги, которые дают нам возможность работать с любым приложением. Наши манипуляторы с ID-захватом могут работать с грузами до 1000 фунтов и идеально подходят для безопасного перемещения тяжелых катушек.
Стандартные и боковые захваты
Стандартные захваты идеально подходят для деталей круглой и аналогичной формы весом от 20 до 400 фунтов. Эти манипуляторы позволяют захватывать и поворачивать детали в нескольких различных направлениях, что упрощает позиционирование неудобных грузов. Инструменты с боковым захватом идеальны, когда детали расположены близко друг к другу. Эти вспомогательные инструменты для подъема позволяют дотянуться за деталью или рядом с деталью, когда движется только одна сторона инструмента. Наши боковые захваты поставляются в нескольких различных вариантах, включая ручное вращение на 180 градусов, автоматический вертикальный наклон и автоматический наклон, наклон и вращение. Наш инженерно-технический персонал может разработать инструменты для индивидуального проектирования в соответствии с вашими потребностями.
Наш инженерно-технический персонал может разработать инструменты для индивидуального проектирования в соответствии с вашими потребностями.
Инструменты с магнитным захватом
Магнитные подъемные приспособления идеально подходят для стальных деталей толщиной четверть дюйма и более. Наши инженеры используют постоянные магниты и электромагниты с пневматическим приводом в зависимости от вашего применения. Эти магнитные манипуляторы могут обрабатывать грузы до 1000 фунтов. Независимо от того, поднимаете ли вы большие плоские листы стали или цилиндрические стальные трубы, вы можете использовать эти манипуляторы с магнитным приводом для многих решений по обработке стали. Наши магнитные манипуляторы имеют возможность предотвратить выброс детали в воздухе. Это искробезопасная конструкция, встроенная в воздушный контур оснастки. Если вы используете электромагнитный, мы предлагаем клиентам возможность резервного питания от батареи, чтобы предотвратить высвобождение детали в случае потери питания.
Всего комментариев: 0