Шаговый двигатель управление: Статьи компании Purelogic R&D
Содержание
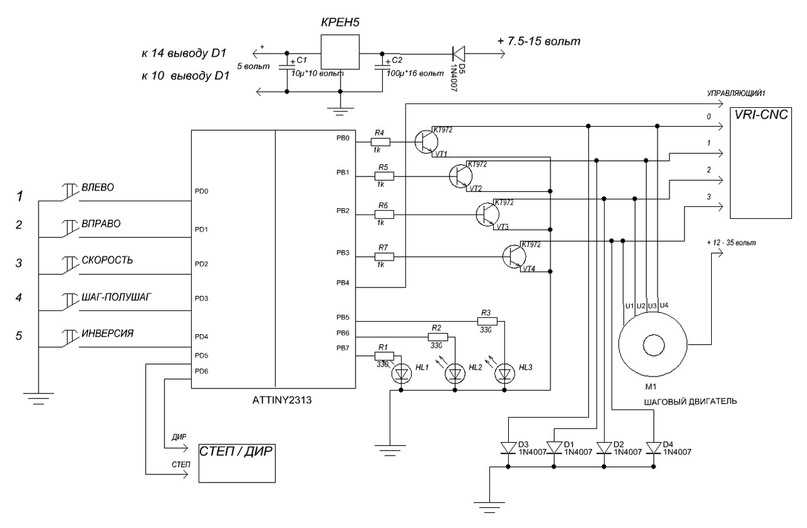
Схема управления шаговым двигателем и принцип работы
ШАГОВЫЕ ДВИГАТЕЛИ — ПРИНЦИП РАБОТЫ
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определённый угол, для совершения механической работы, приводящей в движение различные механизмы.
Принцип работы шаговых двигателей
Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора (состоящего из катушек (обмоток)) и ротора, на котором установлены постоянные магниты.
На картинке изображены 4 обмотки, расположенные на статоре под углом в 90 градусов относительно друг друга. Тип обмотки зависит от конкретного типа подключения шагового двигателя (как подключить шаговый двигатель).На примере выше обмотки двигателя не соединены, значит двигатель с такой схемой имеет шаг поворота в 90 градусов. Обмотки задействуются поочередно по часовой стрелке, а направление вращения вала двигателя обусловлено порядком задействования обмоток. Вал двигателя вращается на 90 градусов каждый раз, когда через очередную катушку протекает ток.
Вал двигателя вращается на 90 градусов каждый раз, когда через очередную катушку протекает ток.
Шаговые двигатели — применение
Область применения шаговых двигателей довольно широка, они используются в промышленности, в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами (униполярные и биполярные) и двигатели с переменным магнитным сопротивлением (гибридные двигатели).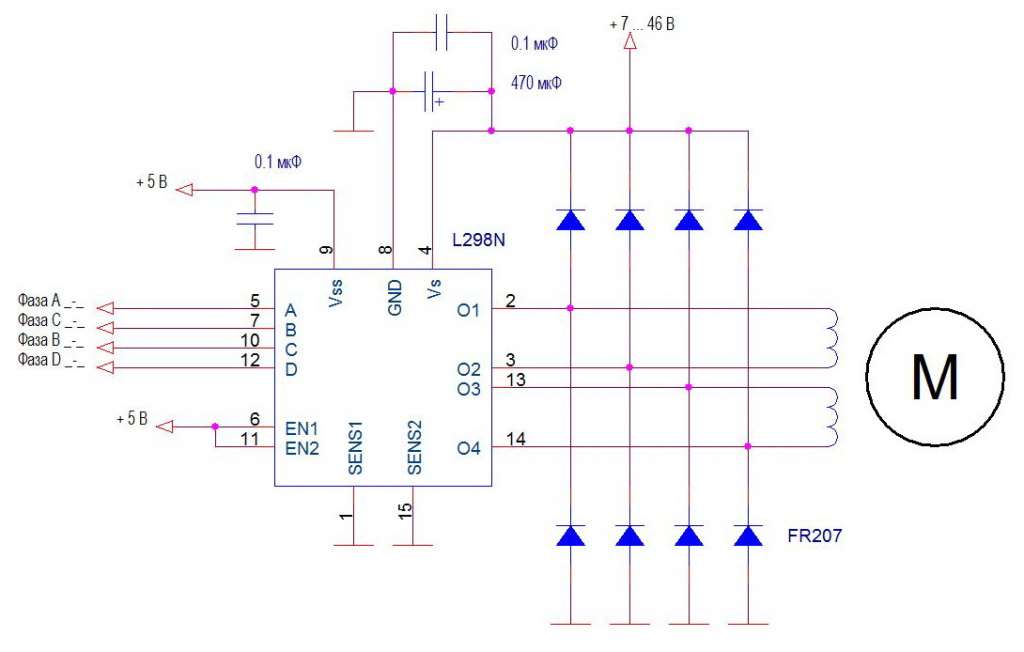 С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Управление биполярным шаговым двигателем требует наличия мостовой схемы. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется физическими возможностями шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению вала двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.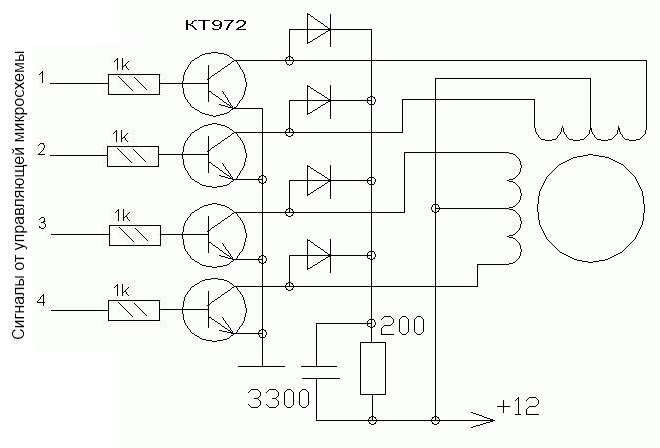
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.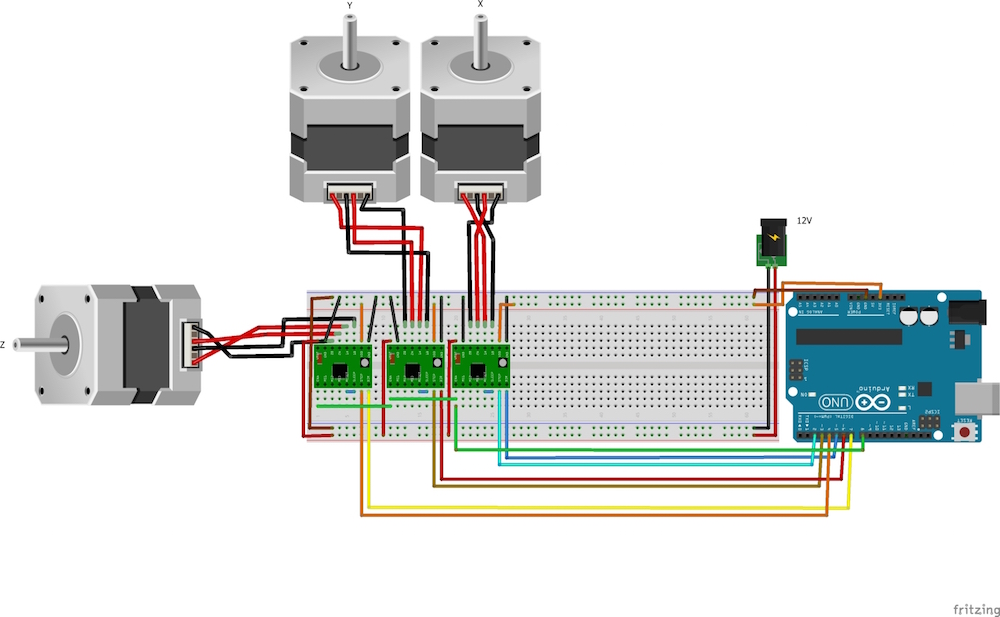
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.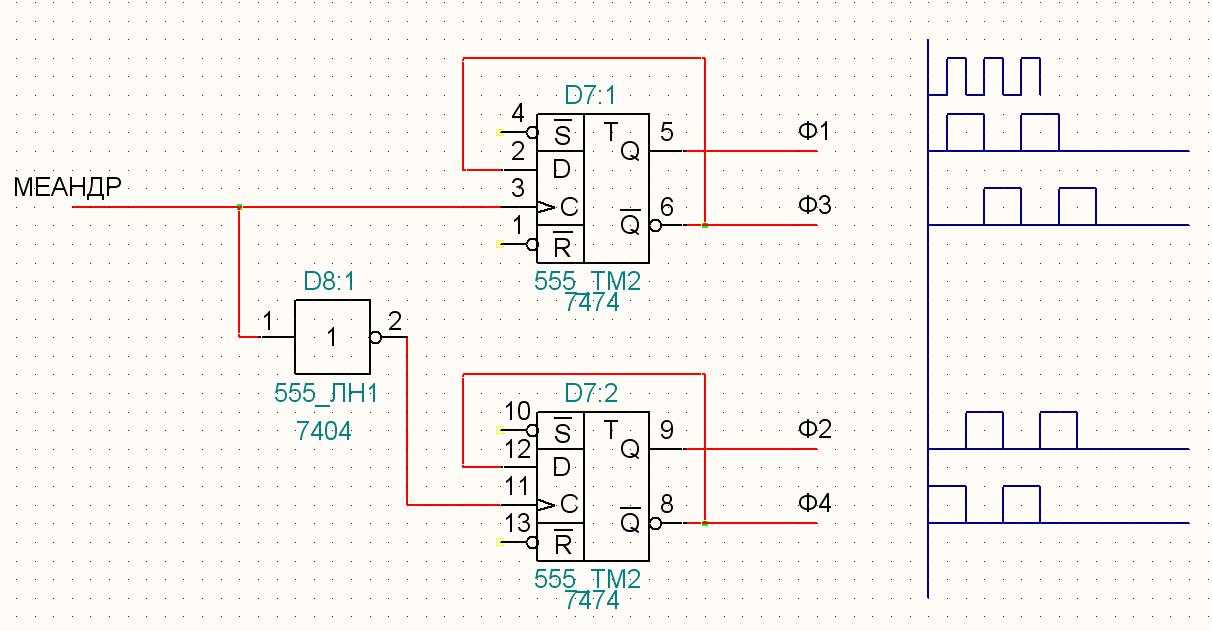 к. изменение направления поля не влияет на положение ротора.
к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Важными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемистость падает с увеличением нагрузки.
DARXTON
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Шаговые двигатели не имеют коммутаторов и щеток. Это синхронные двигатели постоянного тока с электронно-коммутируемым магнитным полем, вызывающим вращение якоря (его магнитов). Можно считать, что шаговые двигатели управляются цифровыми импульсами, и в шаговом двигателе полный угол поворота ротора разделен на дискретное количество шагов. Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Конструкция шагового двигателя
Теория работы шаговых двигателей. В отличие от двигателей постоянного или переменного тока, для шаговых двигателей требуется последовательное питание, то есть они должны получать фиксированную последовательность импульсов для отдельных катушек. Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный – 5 или 6 контактов.
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
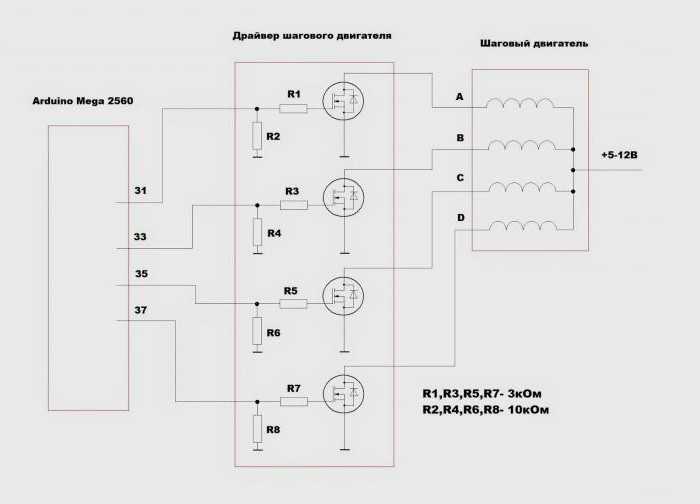
На практике вместо переключателей используются биполярные транзисторы, чаще можно встретить драйверы на основе полевых МОП-транзисторов, благодаря возможности пропускания большего тока, а также возможности их перегрузки. Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Последовательность импульсов A +, B +, A -, B – вращает двигатель в одном направлении. Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -).
Самый простой способ изменить направление – поменять местами одну пару проводов катушки (поменять местами, например, B + с B – и B – с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов – использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей – простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Двухфазное управление шаговым мотором
Гораздо лучшей альтернативой однофазному управлению будет двухфазное, при котором работают две из четырех обмоток шагового двигателя. В таком управлении используем 1/2 всех обмоток. Тогда мотор станет более эффективен.
Вращение двигателя при двухфазном полноступенчатом управлении
Две катушки шагового двигателя всегда находятся под напряжением. Опять же, мы никогда не питаем две катушки из одной пары одновременно. С каждым импульсом от генератора переключается только одна катушка из отдельных пар (последовательно). В первом цикле катушки A и B находятся под напряжением, во втором катушка A все еще находится под напряжением, в то время как катушка B переключается на B +, в третьем цикле катушка B + находится под напряжением из второго цикла, и катушка A переключается на A + и так далее.
Двухфазная последовательность управляющих импульсов
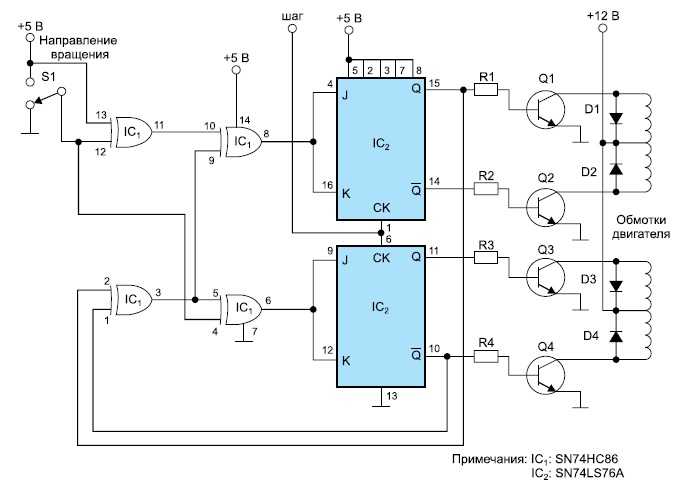
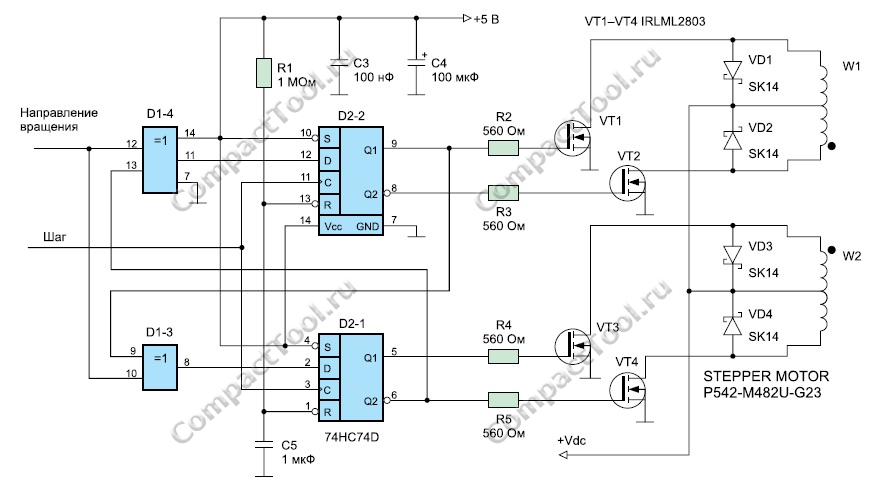
Формы сигналов A + и B + сдвинуты друг к другу (две из четырех обмоток всегда работают в заданном цикле), а сигналы A + и B- инвертируются с сигналами A + и B +. Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A – и A – на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Упрощенная схема двухфазного контроллера с изменением направления вращения, D-триггерами для создания смещенных сигналов и логическими вентилями XOR
Оба типа управления представленные выше: однофазный (волновой) и двухфазный (инвертированные сигналы, управляющие транзисторами), в просторечии, являются униполярными типами управления, потому что используем униполярные шаговые двигатели с дополнительными ответвлениями обмотки. Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также стоит упомянуть моторы VR (реактивного сопротивления). Двигатели VR обычно имеют три обмотки. Чтобы управлять таким двигателем, нам нужно подавать отдельные обмотки одну за другой в последовательности A, B, C, A, B, C… это заставит двигатель вращаться в одном направлении, в то время как последовательность питания обмотки A, C, B, A, C, B… заставит его вращаться в противоположном направлении. Самый простой способ изменить направление – поменять местами концы двух обмоток шагового двигателя VR, и проще всего это сделать с помощью реле.
Упрощенная схема драйвера резистивного шагового двигателя
Последовательность импульсов управления шаговым двигателем
Последовательность импульсов драйвера реактивного шагового двигателя очень похожа на волновое управление.
Биполярное управление обеспечивает более эффективное использование шагового двигателя, при котором всегда работает вся обмотка шагового двигателя, что дает гораздо лучшую производительность на низких и средних скоростях. А крутящий момент примерно на 30 – 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
А крутящий момент примерно на 30 – 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
Биполярный драйвер требует более сложного управления из-за того, что нужно управлять каждым из восьми транзисторов индивидуально. Взамен получаем все возможности шагового двигателя, хотя реализация такого типа управления не самая простая.
Принцип работы такого моста основан на том, что если верхний транзистор проводит в одной ветви, а нижний транзистор в другой, и наоборот, то через катушку шагового двигателя будет протекать ток. Если два верхних или два нижних транзистора проводят одновременно в двух ветвях одного моста, то ток через катушку не будет протекать. Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Также в биполярных контроллерах имеем дело с однофазным (волновым) и двухфазным управлением. Оба элемента управления являются полношаговыми. При однофазном управлении, как и в униполярных шаговых двигателях, в следующем цикле запитывается только одна катушка,
Вращение биполярного шагового двигателя в последовательных тактах однофазного (волнового) цикла управления
Вращение биполярного шагового двигателя в последовательных тактах двухфазного цикла управления
Упрощенная схема драйвера для биполярных двигателей с транзисторными Н-мостами
Последовательность импульсов для питания катушек идентична униполярному двигателю, но в этом случае нет четырех сигналов на транзисторы, только восемь сигналов на восемь транзисторов. Каждым из них нужно управлять индивидуально, переключая соответствующие транзисторы в нужный момент. Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Включаем транзисторы «крестом» в катушке A и B. Напряжение питания катушки задается как в униполярном управлении, в то время как «массовый» транзистор подключается крест-накрест к присоединенному верхнему силовому транзистору. Можем если надо изменить скорость, изменив управление двумя концами одной катушки, что приведет к другой последовательности импульсов. Самый простой способ – использовать реле, как при униполярном управлении, также можно реверсировать сигналы, управляющие транзисторами.
Ход управления катушками в биполярном шаговом двигателе волнового управления
Чтобы понять идею, можно сказать что на схеме показано питание проводов биполярного шагового двигателя, т.е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние – появление заземления на отдельных проводах в заданном цикле.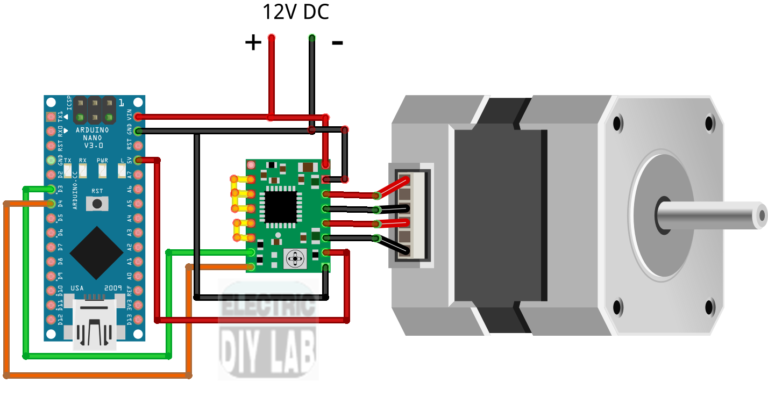 Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A – питается от генератора, а в третьем A – земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A – питается от генератора, а в третьем A – земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Фактически, форма сигналов управления транзисторами в H-мосте будет выглядеть как на схеме ниже. Это биполярное однофазное (волновое) управление.
Ход транзисторной последовательности управления в биполярном волновом контроллере
Идея управления катушками двухфазного биполярного двигателя аналогична управлению двухфазным униполярным шаговым мотором. Здесь также нужно управлять каждым транзистором отдельно, как в случае управления биполярной волной. Можем изменить скорость на реле, как при управлении волнами, или использовать логические вентили, меняющие сигналы.
Ход управления катушками в биполярном двигателе двухфазного управления
Эта схема, что касается управления биполярной волной, показывает соответствующий источник питания проводов биполярного шагового двигателя.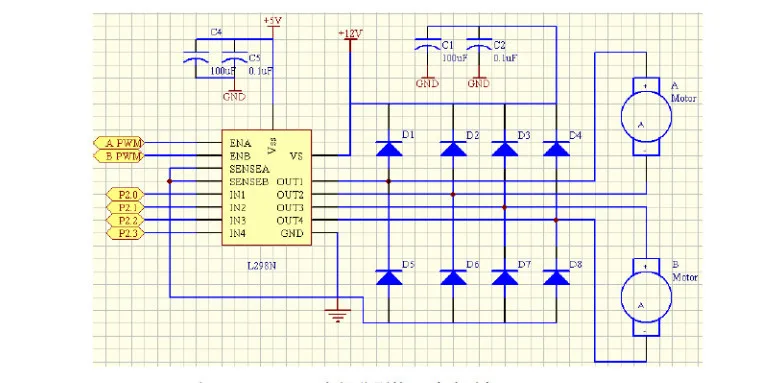 Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A – и B – земли A + и B + находятся под напряжением, во втором цикле проводники A – и B + земли A + и B- находятся под напряжением и так далее.
Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A – и B – земли A + и B + находятся под напряжением, во втором цикле проводники A – и B + земли A + и B- находятся под напряжением и так далее.
Последовательность импульсов управления транзистором будет выглядеть примерно так:
Последовательность управления транзистором в двухфазном биполярном контроллере
Как правило, биполярные шаговые двигатели требуют сложной схемы управления. Эта проблема была решена с появлением специализированных интегральных схем (A3977, A4988, L297), которые используются для генерации соответствующей последовательности импульсов для управления транзисторами в H-мосте.
Также можем использовать логические элементы или D-триггеры для генерации этой последовательности, но чаще существуют драйверы, построенные на микроконтроллерах или специализированных интегральных схемах.
Самым большим преимуществом управления биполярным шаговым двигателем является хорошо используемый крутящий момент, благодаря тому что вся обмотка находится в текущем состоянии после получения импульса (в течение одного цикла).
Двигатели PM (с постоянным магнитом) и HB (гибридные), несмотря на их различную конструкцию, управляются одинаково. Каждый двигатель с 4 контактами может управляться только биполярно, в то время как униполярный шаговый двигатель с 6 контактами может работать как биполярный, так и униполярный.
Двигатели с 8 выводами дают гораздо больше возможностей, они могут работать как однополярные, так и биполярные. Кроме того, шаговый двигатель можно подключить последовательно, где нужно подавать на него более высокое напряжение, но в то же время он будет потреблять меньше тока, что приведет к снижению мощности на более высоких скоростях.
Также можем подключить его параллельно и запитать от более низкого напряжения, но с более высоким током. Это даст меньше потерь мощности на более высоких скоростях. На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
Схема последовательного и параллельного подключения 8-проводного шагового двигателя
Идея последовательного и параллельного подключения также может быть использована с 6-проводным униполярным двигателем.
Схема последовательного и параллельного подключения 6-проводного шагового двигателя
Следует отметить, что при управлении шаговым двигателем мы переключаем обмотки, имеющие некоторую индуктивность. Когда ток прерывается в индуктивности, генерируется напряжение самоиндукции, которое может быть большим и повредить транзистор. Чтобы исключить это явление, необходимо правильно обеспечить протекание тока в катушке даже после выключения транзистора. Наиболее распространены быстродействующие диоды, которые срезают всплески, возникающие при открытии транзистора. Также можете найти драйверы с конденсаторами вместо диодов.
Схема подключения диодов к униполярному драйверу на биполярных транзисторах
Верхние диоды на схеме отсекают положительные импульсы, образовавшиеся в результате отключения тока от катушек шагового двигателя. С другой стороны, нижние диоды тоже нужны, потому что две обмотки одной пары образуют автотрансформатор. Когда в одной катушке есть положительное перенапряжение, отсекаемое верхним диодом, в другой катушке той же пары происходит отсечение отрицательного перенапряжения нижним диодом.
Иная ситуация с использованием MOSFET-транзисторов, потому что транзистор уже имеет в своей структуре переход сток-исток, который в данном случае действует как диод. При использовании небольших двигателей верхние диоды можно не устанавливать. Положительная энергия вывода не очень велика и может быть поглощена транзистором, который кратковременно работает в разрешенном режиме лавинного пробоя и действует как стабилитрон.
Схема униполярного шагового двигателя с MOSFET транзисторами
Также используем тот же принцип для биполярного управления. При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
Схема использования диодов в биполярных драйверах
Схема биполярного шагового двигателя с MOSFET транзисторами
Ещё стоит упомянуть инерцию обмоток, ограничивающую скорость нарастания тока. Каждая из катушек шагового двигателя имеет определенную индуктивность L и сопротивление R. После подачи напряжения на катушку ток I определяется напряжением питания катушки (VCC) и ее сопротивлением, то есть I = VCC / R. Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
На низких частотах (скоростях) это значения не имеет, а на более высоких частотах ток не успеет увеличиться до нужного значения. Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Лучшее решение этой проблемы – подать на двигатель напряжение, намного превышающее номинальное напряжение его работы. Из-за более высокого напряжения ток нарастает быстрее. Правда для этого требуется специальная схема, ограничивающая ток протекающий по обмоткам.
Среди других решений – использование резистора, который выбирается так, чтобы ток в установившемся режиме был равен номинальному току двигателя. Недостатком такой системы являются большие потери мощности на резисторе.
Недостатком такой системы являются большие потери мощности на резисторе.
Схема использования резистора для ограничения тока в обмотках шагового двигателя
Иное решение – заменить резисторы на источник тока, который будет поддерживать заданное значение. Сначала на катушку подается высокое напряжение, которое ускоряет нарастание тока, затем источник будет поддерживать заданное значение тока катушки. Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Схема использования источника тока для ограничения тока в обмотках шагового двигателя
Другой способ – работать от двух источников питания. В первые моменты импульса катушка питается от более высокого напряжения, которое ускоряет рост тока, затем она переключается на второй источник с номинальным напряжением питания шагового двигателя.
Недостатком такого решения является необходимость использования двух источников, что связано с дополнительными преобразователями. На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
Упрощенная схема использования двух источников питания для регулирования тока в обмотках шагового двигателя
Самый эффективный метод – чопперский. Он заключается в подаче на катушку двигателя не одиночных импульсов, а серии импульсов по форме напоминающих сигнал ШИМ. В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
Фрагмент схемы биполярного контроллера с технологией чоппера
Форма сигнала прерывателя для управления транзистором
Напоминаем, что в первые моменты управляющего импульса продлеваем включение транзистора, что позволяет быстрее увеличить ток, благодаря гораздо более высокому напряжению VCC, чем номинальное напряжение мотора. В следующие моменты импульса значительно сокращаем время транзистора, он работает циклически и тем самым ограничивает напряжение до номинального рабочего напряжения шагового двигателя. Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Схема использования компаратора в биполярном контроллере
Эта схема очень эффективна и позволяет регулировать ток катушки независимо от напряжения питания, изменяя напряжение Vs.
Напряжение питания катушки VCC намного выше, чем рабочее напряжение обмотки, а это означает что после включения транзистора ток достигает своего рабочего значения намного быстрее, за гораздо более короткое время чем постоянная времени L / R. После достижения порогового значения (установленного Vs) компаратор сравнивает падение напряжения на управляющем резисторе Rs с напряжением Vs. Если ток двигателя и, следовательно, падение напряжения на Rs увеличиваются выше напряжения Vs, компаратор запускает моностабильный триггер, который излучает один импульс и на короткое время отключает напряжение питания катушки, что снижает ток, а затем цикл повторяется с начала.
В результате компаратор и триггер циклически открывают и закрывают транзистор, что предотвращает повышение напряжения катушки до напряжения питания VCC. За счет циклической работы транзистора ограничивается напряжение питания катушки шагового двигателя. Тогда течение имеет пилообразную волну. Ниже представлена диаграмма тока в обмотке прерывателя.
График импульсов тока в обмотке
Этот управляющий сигнал с прерывистой катушкой позволяет увеличить крутящий момент шагового двигателя, особенно при более высоких скоростях вращения. Конечно потребуется еще более интеллектуальная система управления (эта проблема была решена с появлением встроенных драйверов шаговых двигателей и микроконтроллеров), но она позволяет ускорить процесс увеличения тока благодаря подаче гораздо более высокого напряжения на более высокие частоты от генератора, без значительных потерь энергии или использования двух разных источников питания. Тут понадобится только один блок питания с относительно высоким напряжением.
Очень хорошая альтернатива, особенно в тех случаях когда драйвер не нуждается в специальных функциях, – использовать готовые интегральные микросхемы драйверов шаговых двигателей. Многие производители предлагают широкий спектр специализированных чипов, разработанных специально для управления шаговыми двигателями.
Обмотки шаговых двигателей чаще всего управляются формой сигнала ШИМ через H-мосты, по одному на обмотку. Угол поворота пропорционален количеству импульсов, а скорость вращения – их частоте. При работе с полными ступенями довольно много шума и вибрации. К сожалению, также могут быть случаи пропуска ступеней («выход») и, как следствие, потеря контроля над положением ротора. Эта проблема решается за счет использования микрошагов, таким образом питая обмотки так, что ротор проходит через промежуточные положения за один полный шаг.
Если для быстрой остановки двигателя требуется еще несколько шагов, важно правильно определить состояние перехода и остановки.
В этом случае желательно управление с обратной связью в отличие от абсолютного позиционирования с обратной связью, основанного на подсчете шагов. Существует адаптивное управление скоростью шагового двигателя, позволяющее остановить его как можно скорее, несмотря на возможное увеличение нагрузки на этом этапе.
Это возможно на основании наблюдения увеличения BENF и соответствующего увеличения частоты импульсов, питающих двигатель. Вышеописанный алгоритм реализован в интегрированном однокристальном контроллере AMIS-30624. Он настроен для работы с различными типами шаговых двигателей, диапазонами позиционирования и такими параметрами, как скорость, ускорение и замедление.
Схема контроллера AMIS-30624
Он имеет встроенный бессенсорный детектор потери шага, который предотвращает потерю шагов позиционером и быстро останавливает двигатель при его остановке. Это обеспечивает тихую, но точную калибровку во время эталонного прогона и позволяет работать с полузамкнутым контуром. AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
Форум
Как управлять шаговыми двигателями для точных движений роботов
Во многих технологиях, которые движут современным миром, шаговые двигатели активно работают. Эти относительно простые, но высокоэффективные двигатели являются отличным выбором для многих различных применений, включая производственные приложения, в которых используются роботизированные компоненты.
Шаговые двигатели, однако, требуют систем управления, которые могут обеспечить степень точного оперативного управления, которая создает точные и точные движения роботов. И когда инженер проектирует эти системы управления, ему необходимо уделять особое внимание конструкции контроллера и электрической коробки, используемой для его размещения.
В сегодняшнем выпуске блога Polycase TechTalk мы углубимся в основы шагового двигателя и его применения.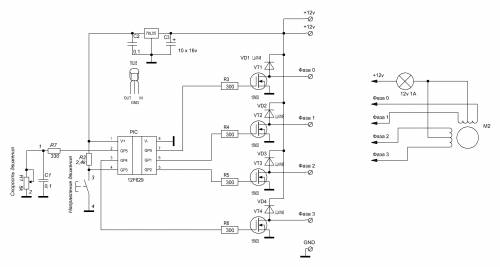 Затем мы поговорим о том, как управлять шаговыми двигателями для инженеров-механиков и электриков, проектирующих и определяющих системы управления двигателями.
Затем мы поговорим о том, как управлять шаговыми двигателями для инженеров-механиков и электриков, проектирующих и определяющих системы управления двигателями.
Частично разобранный шаговый двигатель. Обратите внимание на магнитные катушки, окружающие зубчатый ротор.
Что такое шаговый двигатель?
Шаговый двигатель — это распространенный тип бесщеточного двигателя с питанием от постоянного тока. Чтобы понять, как работают шаговые двигатели и почему мы их используем, вы должны сначала понять несколько вещей о том, как работают электрические двигатели.
Основное назначение электродвигателя — преобразование электрической энергии в механическую. Для этого в электродвигателе используются различные типы магнитов, которые взаимодействуют друг с другом и заставляют физические компоненты двигателя двигаться. Движение компонентов вращает вал двигателя, который передает механическую энергию от двигателя для питания других частей системы.
Существует два широко используемых типа электродвигателей: коллекторные и бесщеточные. В каждом из них используется свой метод преобразования электрической энергии в механическую:
- Коллекторный двигатель использует электрические контакты, называемые щетками, которые передают ток на якорь, намотанный металлическими катушками. Два постоянных магнита статора, один положительный и один отрицательный, окружают якорь и заставляют якорь, находящийся под напряжением, вращаться. Когда якорь вращается, его кинетическая энергия вращает вал двигателя.
- В бесщеточном двигателе используется несколько электромагнитов статора, расположенных по кольцу вокруг намагниченного ротора. Электромагниты можно активировать и деактивировать последовательно, чтобы управлять вращением ротора и точно совмещать его с каждым магнитом. Здесь вращение ротора создает кинетическую энергию, вращающую вал двигателя.
Коллекторные двигатели все еще используются в различных устройствах, например, в бытовой технике. Однако бесщеточные двигатели вытеснили щеточные во многих других областях, в том числе во многих цифровых технологиях, которые управляют нашим миром.
Однако бесщеточные двигатели вытеснили щеточные во многих других областях, в том числе во многих цифровых технологиях, которые управляют нашим миром.
Таким образом, важно понимать, как управлять шаговыми двигателями и как создавать системы управления, которые управляют ими безопасно и эффективно. Прежде чем мы углубимся в то, как они работают, давайте лучше поймем, как используются шаговые двигатели, рассмотрев преимущества, которые могут предложить шаговые двигатели, и приложения, в которых они обычно используются.
Пример базовой конструкции шагового двигателя. Каждая из катушек активируется последовательно, чтобы обеспечить постоянное и предсказуемое движение ротора.
Преимущества шаговых двигателей
Итак, почему шаговые двигатели часто выбирают для робототехники? Вот некоторые из основных преимуществ шаговых двигателей, благодаря которым они идеально подходят для робототехники:
- Чрезвычайно точное управление движением и позиционированием двигателя
- Намного меньше требований к техническому обслуживанию, чем у коллекторных двигателей
- Высокоэффективная и надежная работа при номинальных скоростях и нагрузках
- Значительно меньшая занимаемая площадь, чем у большинства коллекторных двигателей
- Генерирует гораздо меньше тепла и электрического шума, чем коллекторные двигатели питают только одну сторону кольца катушки статора за раз, а также относительно недороги, что делает их популярными как среди любителей электроники, так и среди профессионалов.
 Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную находящейся под напряжением катушке статора, более сложны и дороги. Однако их более плавная и точная работа делает их более подходящими для промышленного применения.
Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную находящейся под напряжением катушке статора, более сложны и дороги. Однако их более плавная и точная работа делает их более подходящими для промышленного применения.Шаговый двигатель подходит не для всех задач. Если в вашем проекте требуется постоянное вращение двигателя на очень высоких скоростях (обычно более 2000 об/мин), многочисленные полюса в шаговом приводе могут вызвать такие условия, как потери на вихревые токи, которые снижают эффективность двигателя. Кроме того, износ ротора на таких высоких скоростях может сократить срок его службы.
Закажите корпус ЧПУ для вашего проекта обработки с ЧПУ
Робототехника для шаговых двигателей
Шаговые двигатели используются в самых разных областях, особенно в робототехнике. Поскольку шаговые двигатели обеспечивают точное позиционирование и надежные повторяющиеся движения, они идеально подходят для приложений, требующих длинных последовательностей быстрых и точных движений.
 Распространенные применения шаговых двигателей в робототехнике включают:
Распространенные применения шаговых двигателей в робототехнике включают:- CNC-обработка
- 3D- и 2D-печать
- Текстильное производство
- Медицинские устройства визуализации
- Системы хранения данных на жестких дисках
Каждое из этих приложений требует точного контроля над роторами, лазерами, печатающими головками, стилусами и другими автоматизированными роботизированными компонентами. Шаговые двигатели обеспечивают точное управление и надежность, необходимые инженерам при проектировании робототехнических систем. Однако для того, чтобы шаговые двигатели реализовали свой потенциал в этих приложениях, важно иметь четкое представление о том, как управлять шаговыми двигателями с использованием различных доступных методов управления напряжением.
Основы управления шаговым двигателем
По сути, основным методом управления шаговым двигателем является включение и выключение катушек, окружающих шестерню, в правильной последовательности.
 Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений.
Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений.Изменения в подаче тока на шаговый двигатель могут привести к чрезвычайно тонким и точным различиям в позиционировании. Точность шагового двигателя зависит от количества его шагов, то есть от количества различных позиций, которые он занимает в течение полного цикла вращения. Шаговый двигатель с большим количеством шагов будет в большей степени способен создавать более точные различия в позиционировании. Уровень точности, которого может достичь шаговый двигатель, известен как разрешение двигателя.
Основные режимы управления шаговым двигателем:
- Волновой привод/Однофазный: последовательно активируется одна катушка. Это самый простой режим работы шагового двигателя, дающий самое низкое разрешение.
- Полный шаг: Две катушки последовательно активируются одновременно, поэтому полярные положения ротора фактически находятся между каждой катушкой.
 Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешение двигателя, поскольку число шагов остается прежним.
Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешение двигателя, поскольку число шагов остается прежним. - Полушаг: Активируется одна катушка, а затем одновременно активируются две катушки на следующем этапе. Таким образом, ротор перемещается на полшага за раз от положения прямого выравнивания, когда активна одна катушка, до положения раздельного выравнивания, когда активны две катушки. Этот режим фактически добавляет дополнительные шаги к вращению двигателя, поэтому он существенно увеличивает разрешение.
- Микрошаг: Катушки активируются серией синусоидальных импульсов, которые перемещают ротор очень маленькими шагами. Этот метод дает самое высокое разрешение из всех перечисленных здесь, благодаря его способности подразделять полный цикл ротора на 256 шагов. Микрошаг также перемещает ротор очень плавно и последовательно, что помогает снизить вибрацию, шум и износ компонентов двигателя. Благодаря этим преимуществам микрошаговый режим является наиболее распространенным режимом активации шаговых двигателей в современных приложениях.

Также можно увеличить разрешение шагового двигателя, увеличив количество катушек и полюсов. Большинство шаговых двигателей, используемых профессиональными инженерами, имеют большое количество катушек, которые обеспечивают около 200 шагов до микрошага. В совокупности эти параметры дают инженерам, использующим шаговые двигатели, множество различных возможностей для повышения точности разрешающей способности двигателя.
Каждый шаговый двигатель управляется через схему драйвера, которая передает ток на катушки, чтобы активировать их. Поскольку весь механизм, управляющий шаговым двигателем, начинается с контроллера двигателя, очень важно, чтобы элементы управления шаговым двигателем были разработаны тщательно и в соответствии с передовыми методами. В следующих разделах мы кратко рассмотрим основы, которые вам необходимо знать при разработке схемы драйвера шагового двигателя.
Основы выбора привода шагового двигателя
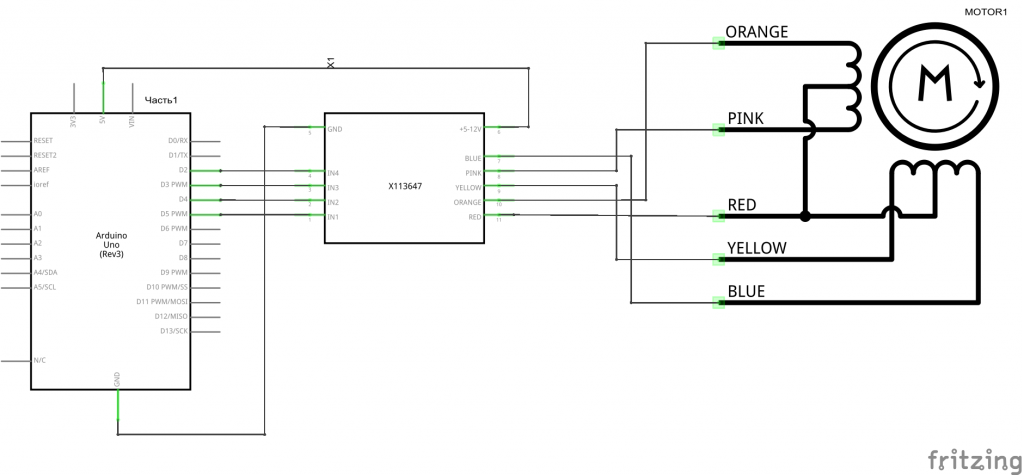
Схема привода шагового двигателя обычно подключается к микроконтроллеру, который обеспечивает оператору двигателя контроль над импульсами напряжения, посылаемыми на катушки.
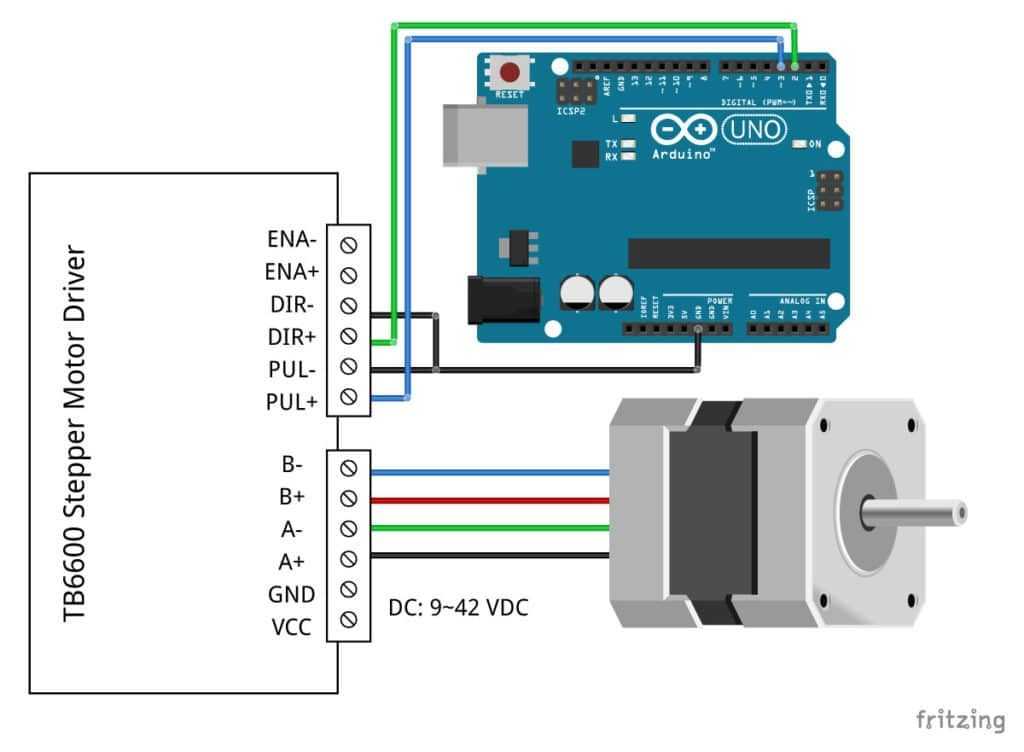
 Для схем шагового привода доступно множество различных вариантов, в том числе некоторые модели, предназначенные для готового использования в качестве контроллера шагового двигателя. Другие используют программируемые микроконтроллеры, такие как Arduino Uno, которые можно запрограммировать с помощью библиотеки управления шаговыми двигателями с открытым исходным кодом.
Для схем шагового привода доступно множество различных вариантов, в том числе некоторые модели, предназначенные для готового использования в качестве контроллера шагового двигателя. Другие используют программируемые микроконтроллеры, такие как Arduino Uno, которые можно запрограммировать с помощью библиотеки управления шаговыми двигателями с открытым исходным кодом.При выборе схемы драйвера шагового двигателя начните с четырех основных факторов:
- Напряжение: Драйвер должен быть рассчитан на самые разные уровни напряжения, так как вам, вероятно, придется протестировать различные напряжения, чтобы найти наилучший вариант. Ваш шаговый двигатель.
- Ток: Драйвер должен быть рассчитан как минимум в 1,4 раза от максимального номинального тока шагового двигателя.
- Микрошаг: Драйвер должен иметь несколько вариантов разрешения шага, чтобы вы могли экспериментировать с различными настройками микрошага.
- Максимальный импульс шага: Драйвер должен быть рассчитан на достаточное количество импульсов шага для вращения ротора со скоростью, требуемой вашим приложением.
Другие факторы при выборе шагового привода
Несмотря на относительно простую конструкцию шаговых двигателей, определение правильного шагового двигателя и разработка соответствующей системы управления могут быть сложной задачей. На четыре фактора, которые мы только что обсудили, может влиять множество других факторов, заслуживающих внимания.
При проектировании системы, включающей шаговый двигатель, обязательно учитывайте следующее:
- Если в вашем приложении требуются определенные скорости вращения и крутящий момент, подбор правильного двигателя и привода может оказаться сложной задачей, даже если вышеуказанные условия соблюдены. обдуманный. Как правило, наиболее точным методом согласования двигателя и привода является использование инженерного программного обеспечения с соответствующими кривыми скорость-момент. Начните с привода с требуемыми характеристиками напряжения и тока, а затем сопоставьте его с двигателем, используя кривую скорость-момент.
- Несоответствие крутящего момента является распространенной проблемой в конструкции привода шагового двигателя, которая может вызвать остановку (из-за недостаточного крутящего момента) или вибрацию и шум (из-за чрезмерного крутящего момента). Чтобы получить правильный крутящий момент, начните с расчета крутящего момента нагрузки для желаемой задачи, которую должен выполнить двигатель. После того, как вы определили требуемый крутящий момент нагрузки, используйте методы согласования нагрузки и крутящего момента двигателя, чтобы убедиться, что крутящий момент вашего двигателя находится в оптимальном диапазоне.
- Помните, что шаговому двигателю требуется полный ток для создания удерживающего момента, а это означает, что шаговый двигатель может сильно нагреться, если он удерживается в одном положении в течение длительного времени. Обязательно учитывайте это при проектировании систем охлаждения.
- Биполярные шаговые двигатели требуют несколько более сложных схем управления, чем униполярные шаговые двигатели, потому что они должны одновременно передавать отрицательный ток на противоположную катушку.
 Если вы используете биполярный шаговый двигатель, убедитесь, что ваш привод рассчитан на управление биполярными двигателями.
Если вы используете биполярный шаговый двигатель, убедитесь, что ваш привод рассчитан на управление биполярными двигателями. - Блок управления шаговым двигателем должен быть защищен электрическими шкафами, чтобы защитить его от опасностей окружающей среды. В зависимости от условий эксплуатации двигателя проводка его распределительной коробки может загрязняться пылью и мусором или повреждаться брызгами воды (среди многих других возможных опасностей).
Корпуса Polycase для блоков управления шаговыми двигателями
Электрические шкафы Polycase — отличный выбор для инженеров, разрабатывающих блоки управления шаговыми двигателями. Инженеры выбирают корпуса Polycase, когда им нужна производительность с рейтингом UL, элегантный дизайн и материалы высочайшего качества для корпусов шаговых двигателей. Кроме того, мы предлагаем варианты индивидуальной настройки корпуса, которые позволяют невероятно быстро и легко модифицировать корпус с помощью специальных вырезов корпуса с ЧПУ и цифровой печати.
Ниже приведены некоторые из наиболее популярных электрических шкафов для наших промышленных клиентов, которые используют их для защиты оборудования, такого как блоки управления шаговыми двигателями:
- Серия ZH: Прочные навесные поликарбонатные шкафы, подходящие для использования внутри и вне помещений.
- Серия SA: Корпуса для наружного применения из нержавеющей стали с характеристиками, соответствующими их элегантному внешнему виду.
- Серия EX: Корпуса из экструдированного алюминия с красивой отделкой и встроенными направляющими для удобного монтажа на печатной плате.
Прочный и доступный корпус из поликарбоната
Полностью собранный шаговый двигатель, включая металлический корпус.
Вам нужен идеальный электрический шкаф для размещения шагового двигателя и/или блока управления двигателем? Наши специалисты по электромонтажным шкафам всегда рады помочь вам выбрать модель, соответствующую вашим потребностям.
 Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.
Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.Кредиты изображений
Alexlmx/shutterstock.com
Fouad A. Saad/shutterstock.com
DarkDiamond67/shutterstock.com
Deniseus/shutterstock.com 3
Deniseus/shutterstock.com 3 Deniseus/shutterstock.com 3 9. .com
ашаркью/Shutterstock.com
sspopov/Shutterstock.com
sfam_photo/Shutterstock.com /MichaelShutter.comubub 3
20010
similis/Shutterstock.com
luchschenF/Shutterstock.com
ValeriiaES/Shutterstock.com
Stepper Motors, Stepper Motor Drivers, Stepper Motor Controllers and Speed Control Stepper Motors
Product Информация
Решения
Техническая информация
Размер двигателя
Загрузки
Виртуальный выставочный зал
Свяжитесь с намиαSTEP
Шаговые двигатели
Бесщеточные двигатели постоянного тока
Серводвигатели
Редукторные двигатели переменного тока
Линейные приводы
Поворотные приводы
Сетевые продукты
Вентиляторы охлажденияБесплатная доставка для онлайн-заказов.
 Принять условия.
Принять условия.Шаговые двигатели
Шаговые двигатели позволяют с легкостью выполнять точное позиционирование. Они используются в различных типах оборудования для точного регулирования угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели с компактным корпусом генерируют высокий крутящий момент и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также удерживают свое положение при остановке благодаря своей механической конструкции. Решения для шаговых двигателей состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Компания Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей с входом переменного или постоянного тока
- Размеры корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее.
 ..
..- Шаговые двигатели (только двигатель)
- Шаговые двигатели с регулированием скорости
- Контроллеры
Драйверы шаговых двигателей
Шаговые двигатели (только двигатель)
Компания Oriental Motor предлагает широкий ассортимент шаговых двигателей, в том числе; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны с размерами корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- Шаговые двигатели 0,79–3,54 дюйма (20–90 мм) NEMA 8–NEMA 34 типоразмера корпуса
- Доступны беззазорные, малозазорные и прямозубые шестерни
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
- αSTEP Шаговые двигатели с замкнутым контуром
- Двухфазные шаговые двигатели
- 5-фазные шаговые двигатели
Драйверы шаговых двигателей
Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.

- Вход переменного или постоянного тока
- Шаговые двигатели с замкнутым контуром AlphaStep, драйверы 2-фазных или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet/IP™, EtherCAT, PROFINET Совместимые версии
- Плата или коробка Тип
- αSTEP Драйверы с обратной связью
- 2-фазные драйверы
- 5-фазные драйверы
EtherNet/IP™ является товарным знаком ODVA
Шаговые двигатели и драйверы для управления скоростью
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера. Рабочая скорость, время разгона и торможения, рабочий ток могут быть установлены с помощью переключателей драйвера, а простое переключение входа FWD (RVS) в положение ON или OFF обеспечивает простоту управления.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры/сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- (связь RS-485)
- EtherCat
- CC-Link
- МЕХАТРОЛИНК
Сетевые преобразователи/шлюзы
- Контроллеры
- Сетевые шлюзы
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальных вибрациях идеально подходят для приложений, требующих быстрого позиционирования на небольшом расстоянии.

Точное позиционирование с точным шагом
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «базовым углом шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36°, 0,72°, 0,9° и 1,8°. 5-фазные шаговые двигатели имеют угол шага 0,36° и 0,72°, а 2-фазные шаговые двигатели имеют угол шага 0,9° и 1,8°.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс.
 Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.Простое управление с помощью импульсных сигналов
Ниже показана конфигурация системы для высокоточного позиционирования. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого постоянно меняется между ON и OFF. Каждый цикл ВКЛ/ВЫКЛ считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя провернуться на один шаг. Уровни сигналов, соответствующие состояниям ВКЛ и ВЫКЛ напряжения, обозначены как «H» и «L» соответственно.
Количество оборотов пропорционально количеству импульсов
Количество оборотов шагового двигателя пропорционально количеству импульсных сигналов (число импульсов), подаваемых драйверу. Соотношение вращения шагового двигателя (угол поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоте импульсов), подаваемых на драйвер.
 Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:Создание высокого крутящего момента в компактном корпусе
Шаговые двигатели генерируют высокий крутящий момент в компактном корпусе. Эти особенности обеспечивают превосходное ускорение и реакцию, что, в свою очередь, делает эти двигатели подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживает себя в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя. Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания крутящий момент самоудержания двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы.
 В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
В лифтах и подобных устройствах используйте тормоз электромагнитного типа.Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для максимального использования возможностей шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выдавать сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Узнайте больше о наших продуктах AlphaStep
Типы операционных систем
Каждый шаговый двигатель и драйвер сочетают в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.

Драйвер импульсного входа
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные вводятся в генератор импульсов заранее. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит рабочую команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через непосредственно подключенный персональный компьютер или программируемый контроллер. Так как не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают проводку.
Разница между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и приводных системах на 100–115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока (некоторые продукты являются исключением из этого правила).
Всего комментариев: 0