Как сделать плоттер своими руками: Режущий и печатающий плоттер из принтера или dvd-привода своими руками
Содержание
Как сделать плоттер своими руками
Идеи о том, чтобы использовать пленку в качестве материала для трафаретов или декалей появились некоторое время назад. Однако уже готовые девайсы, предназначающиеся для нарезки пленки, стоят совсем не дешево. А вариант с посещением специального места с целью резки пленки на необходимые декали не всегда бывает удобным.
Пожалуй, самой трудно преодолимой частью проблемы является приобретение одного из инструментов – флюгерного ножа.
Его стоимость примерно сто евро. Данное препятствие можно решить, заказав в китайском интернет-магазине по доступной цене высококачественный держатель ножа, в комплект которого входит три ножа. Еще одна проблема заключается в правильно подобранном вале подачи материала, включенного в конструкцию плоттера.
Для данного оборудования промышленного типа предназначается рифленый вал, позволяющий избежать проскальзывания пленки. Его невозможно изготовить без специального станка. Получить вал с рифленой поверхностью можно, если обычный подающий вал из резины обернуть листом прочной наждачной бумаги, чтобы он стал шероховатым.
Его невозможно изготовить без специального станка. Получить вал с рифленой поверхностью можно, если обычный подающий вал из резины обернуть листом прочной наждачной бумаги, чтобы он стал шероховатым.
Чтобы на стыках наждачной бумаги не образовались так называемые ступеньки, деталь оклеивается по спирали полосой небольшой ширины. В результате этого стыки торцов наждачки так же будут находиться по спирали вокруг используемой конструкции. Таким образом, основа для будущего плоттера будет готова.
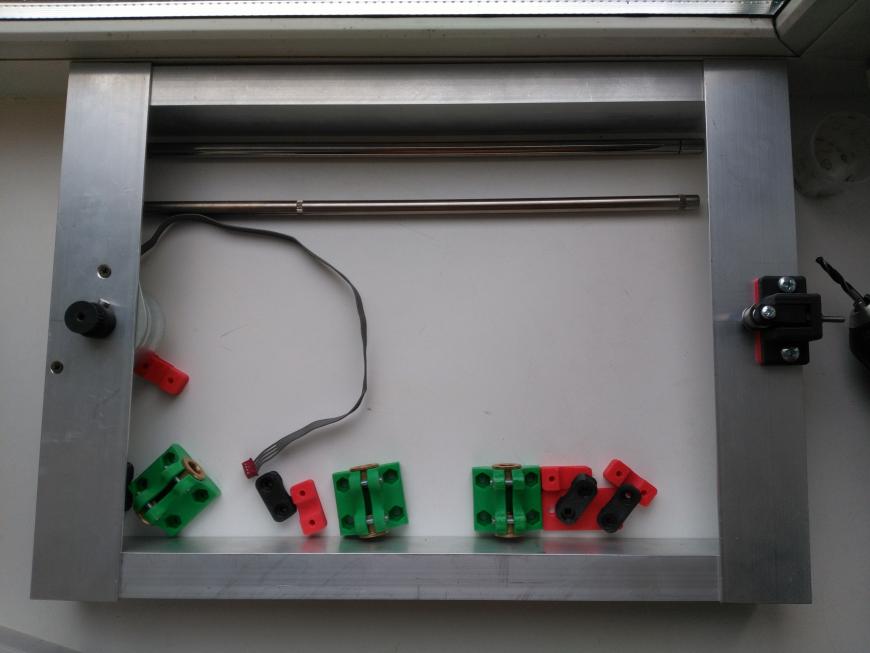
Кроме того, нужны и другие детали для сборки, к которым относятся: валы с втулками, шаговые движки, а также шестеренки.
Понадобится еще один вал, чтобы обеспечить надежную фиксацию пленки. Он крепится на трехмиллиметровые карбоновые качалки. В последние необходимо вклеить подшипники качения. Это позволит сделать подачу пленки и бумажных листов беспроблемной.
Горизонтальная ось в плоттере представляет собой П-образную форму, которая оснащена подпружиненной деталью для натяжения ремня.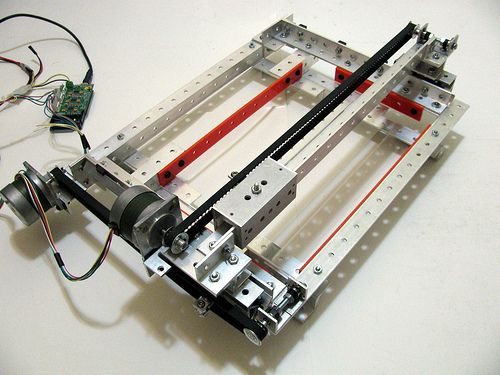 К тому же она выполняет роль второй направляющей для каретки головки и местом крепления ШД.
К тому же она выполняет роль второй направляющей для каретки головки и местом крепления ШД.
В оборудование следует установить трехканальный контроллер. При этом лучше, чтобы привод ножа был тангенциальным. Три канала являются не только тремя PICами, но и тремя силовыми ключевыми выходными каскадами, предназначающимися для ШД. В комплектацию контроллера входит еще один силовой каскад, подходящий специально для соленоида, размещенного в режущей головке.
В качестве основы для головки стоит взять восьми миллиметровую плитку из дюраля. К ней крепится соленоид, который можно снять практически с любого кассового аппарата. Также необходимо соединить его с двумя направляющими. Главная направляющая должна передвигаться во втулках, а дополнительная дает возможность избежать частого проворачивания по оси основной детали. Последняя зажимается между несколькими подшипниками: одним неподвижным и другим, зафиксированном на качалке, что позволяет контролировать степень поджима.
Чтобы вал подачи материала мог вращаться, следует использовать двухступенчатый редуктор. Это объясняется тем, что у шагового мотора слишком большой угол поворота. С целью предотвращения мертвых ходов редуктора устанавливается двойная шестеренка с подпружиненным механизмом, которая не допускает постепенного накопления незначительных погрешностей, появляющихся при перемещении пленки.
При желании может использоваться любая бумага и бумажная продукция оклеенная скотчем, самодельный плоттер отлично режет детали и по такому «бутерброду».
Для управления самодельным плоттером используется программа Mach4. Сигнал DIR позволяет управлять движениями ножа.
Для получения резки высокого качества важно правильно настроить компенсации оффсета ножа. Фактически, он представляет собой флюгер, где режущий элемент не должен совпадать с осью вращения.
Конструкция, подготовленная вышеперечисленных способом, является понятной и вполне подходящей для криволинейных резов, но никак не для острых углов.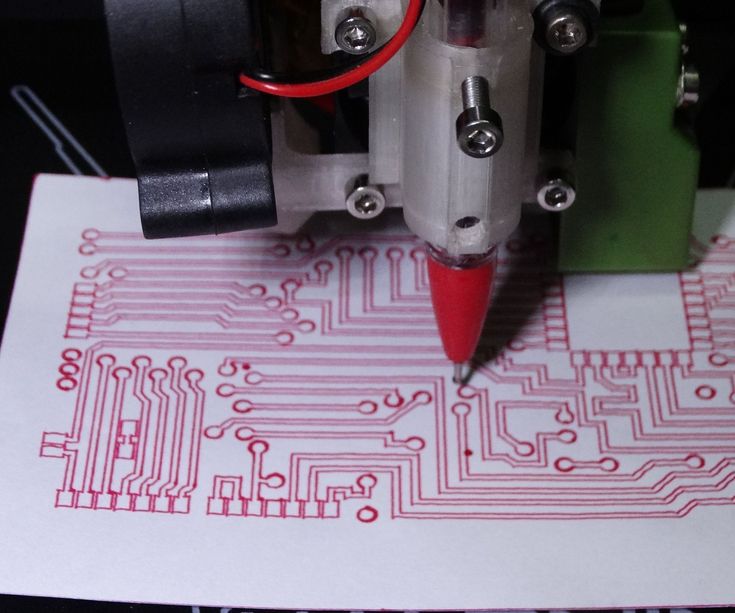 Специально для этого предназначается программа, находящаяся в соответствующем софте плоттера промышленного типа. Она управляет станком, выполняя разнообразные движения на любых углах. В результате нож оборачивается исключительно по указанной линии.
Специально для этого предназначается программа, находящаяся в соответствующем софте плоттера промышленного типа. Она управляет станком, выполняя разнообразные движения на любых углах. В результате нож оборачивается исключительно по указанной линии.
На данном этапе изготовления плоттера появляется проблема, ведь для самодельного оборудования, даже если применяется традиционная САМ-программа, достаточно сложно получить точно такую-же компенсацию для оффсета ножа. В интернете можно скачать маленькую, удобную утилиту, что функционирует на Python-2.7. благодаря ей задается компенсация оффсета.
В некоторых случаях нож меняют на обычную шариковую ручку, которую дорабатывают, пружиня стержень, чтобы достичь хорошего постоянного прижима к поверхности. В противном случае она будет писать очень плохо.
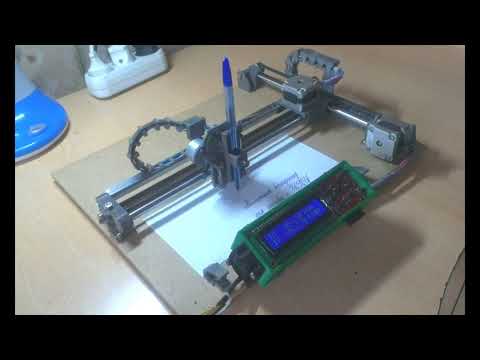
Посмотрите видео работы самодельного плоттера.
Самодельный ЧПУ станок
ЧПУ плоттер на Arduino своими руками.
Сегодня расскажу, как можно собрать своими руками ЧПУ плоттер, который будет рисовать ручкой по бумаге. Собирать буду из доступных материалов. Себестоимость станка не превышает 2.5 т. руб. Недорогой и при этом справляется со своей задачей отлично. Наверное, хватит расхваливать свой ЧПУ станок, пора бы и рассказать вам как его сделать. Также рекомендую посмотреть мои предыдущие самодельные ЧПУ станки:
- Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
- Самодельный Лазерный гравёр с ЧПУ, в домашних условиях.
- Самодельный ЧПУ фрезерный станок на Arduino с дисплеем.
- Самодельный CNC станок из мебельных направляющих на базе Arduino UNO.
- Лазерный гравировальный станок с ЧПУ (шаговые двигателя от матричного принтера)
- Мой первый ЧПУ станок из матричных принтеров
Сборка Самодельного плоттера на Arduino.
Для проекта понадобиться следующая электроника:
- ARDUINO UNO.
- CNC shield v3, описание читайте в статье: «Плата для ЧПУ на Arduino UNO, CNC shield v3 и драйвера A4988 (DRV8825)».
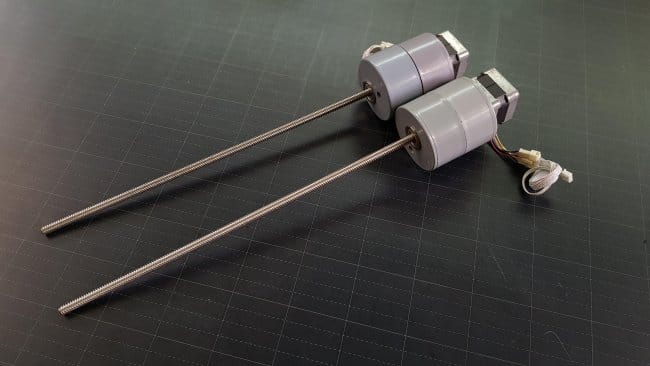
- 2 шаговых двигателя NEMA 17 17HS4401. С проводами, которые идут в комплекте.
- 2 драйвера A4988. Про них можно почитать в статье: «Драйвер шагового двигателя A4988».
- Блок питание на 12 вольт.
- Servo 9g.
Сборка механики станка.
Недавно делал узел из карандашей (каретку для ЧПУ), и на основе данной каретки решил собрать ЧПУ плоттер. Но нужно, как минимум, 2 оси, поэтому собрал второй узел, но немного уже. Вот так выглядят узлы осей X и Y для самодельного станка.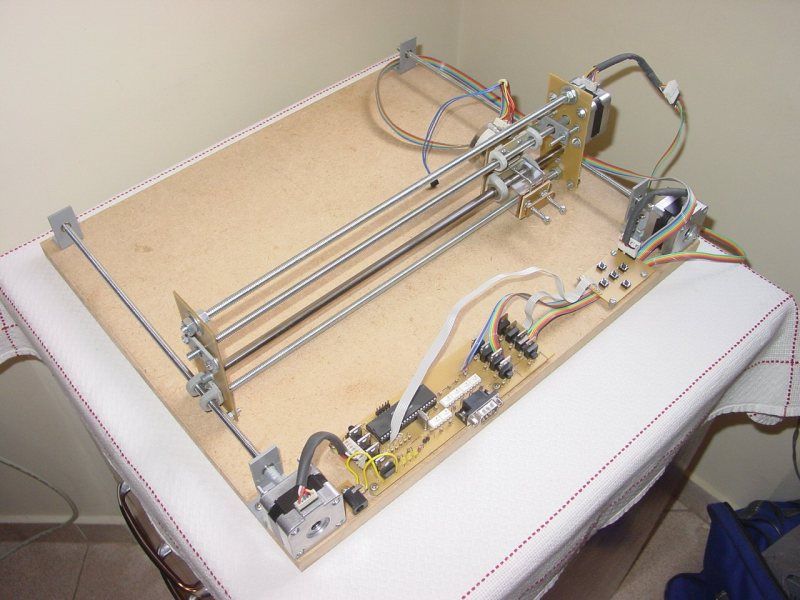
Как собирал каретку, можете почитать в предыдущей статье. Про нее могу сказать одно: сделана она из карандашей, строительной шпильки и фанеры.
У широкой каретки поменял основание, на более широкое. Это поможет устранить лишнюю вибрацию станка, и будет поверхность, на котором можно закрепить листок бумаги.
На подвижную часть первой каретки, под углом 90 градусов, устанавливаю вторую каретку. И закрепляю ее с помощью саморезов.
Обычную ручку использовать в данном проекте не получится, так как нужен подвижный механизм, а также крепеж для нее. Для этого купил в канцелярском магазине: гелевую ручку, авторучку и циркуль «козья ножка».
Из гелевой ручки достал пасту и на край установил пружинку из авторучки. Также срезал бортик внизу пасты. Чтобы она проваливалась в корпус ручки.
Установил пасту в ручку и проверил нажатием пальца. Паста проваливается и потом обратна возвращается под действием пружинки.
Намотал и приклеил нитку на пасту. Тут я допустил ошибку, использовал хлопчатобумажную нить. Она у меня притёрлась буквально через 2 часа работы. Заменил капроновой нитью и нанес на нее смазку.
В корпусе ручки сделал отверстия, и продернул нить. Установил пасту на место.
На ось X установил сервопривод, прикрепив его саморезами.
Используя держатель от циркуля «козья ножка», прикрепил ручку на ось X.
Привязал нить от ручки к качалке сервопривода. Закрепил винтом качалку.
Все механику собрали, сейчас можно устанавливать остальные компоненты и проверять работоспособность станка.
Установка электроники плоттера.
Большая часть электроники у нас установлена. А именно, шаговые двигателя стоят на месте, сервопривод установлен. Осталось установить управляющую электронику.
На подготовленную фанерку, установил плату Arduino UNO.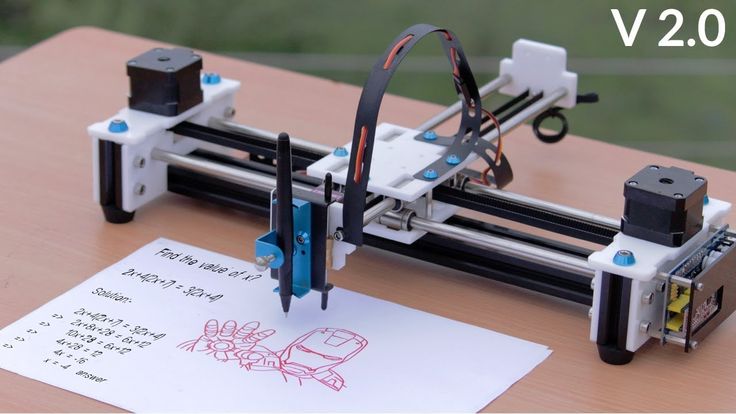
Сверху двигателя оси Y установил фанерку с Arduino.
На Arduino UNO установил CNC shield v3 и 2 драйвера A4988.
Осталось все подключить, а для этого нужна схема подключения.
Схема подключения электроники ЧПУ плоттера на Arduino UNO и CNC shield v3.
Схема подключения очень простая и не требует дополнительных проводов.
Шаговые двигателя подключаю проводами, которые идут в комплекте.
Для подключения сервопривода нужно достать информационный провод из колодки, он обычно оранжевого цвета, и подключить к пину Z+, а провода питания сервопривода подключить к выводам 5v и GND, на CNC shield.
Подключение самое простое, из всех моих самодельных ЧПУ станков. Вот почему многие начинают сборку своих первых ЧПУ станков с плоттера.
Установка и настройка grbl.
Как загрузить прошивку grbl в Arduino UNO уже рассказывал не однократно, например в статье: «Установка и настройка программы LaserGRBL.», но тут будем использовать немного модифицированную прошивку, как раз под данный проект. Поэтому повторю все шаги, которые нужно сделать.
1. Установка Arduino IDE.
Сперва, нужно установить среду программирования Arduino IDE. Если она у вас установлена, то можете смело пропустить данный пункт.
Я уже рассказывал, как установить и настроить программу Arduino IDE, в статье: «Программа Arduino IDE, бесплатно для Windows, Mac OS, linux. Прошиваем Arduino». Поэтому, расскажу вкратце основные этапы установки и настройки, для операционной системы Windows.
Установка драйвера ch440.
- Скачайте драйвер внизу статьи в разделе «файлы для скачивания»;
- Распакуйте архив;
- Запустите исполнительный файл «Ch441SER.
 EXE»;
EXE»; - В открывшемся окне нажмите кнопку Install;
- На этом установка завершена.
Теперь можно приступать непосредственно к загрузке библиотеки GRBL.
2. Установка библиотеки grbl.
Как и писал ранее, использовать будем не стандартную библиотеку GRBL. Найти необходимую библиотеку можно по запросу в поисковике «Grbl Pen Servo», либо скачать внизу страницы в разделе «файлы для скачивания».
Внимание!!! Нужно обязательно удалить библиотеку GRBL, если вы ставили раньше. Для этого заходим в папку «Документы\Arduino\libraries» и ищем папку «grbl», и удаляем ее.
Дальше нужно установить библиотеку grbl. Это можно сделать двумя способами:
- Скопировать папку grbl, из архива, в папку с библиотеками Arduino, которая располагается по следующему пути: Документы\Arduino\libraries.
- Установить через менеджер библиотек:
Заходим в Arduino IDE и выбираем в меню: Скетч –> Подключить библиотеку –> Добавить .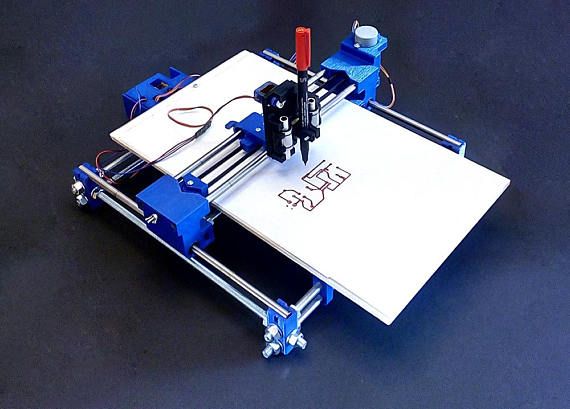 ZIP библиотеку…
ZIP библиотеку…
Выбираем скаченный архив grbl.zip и нажимаем кнопку «Открыть». После установки вы увидите надпись, что библиотека успешно добавлена.
3. Загрузка grbl в Arduino UNO.
После установки библиотеки grbl, заходим в меню Файлы –> Примеры, и в списке ищем пример «grbl». Открываем пример «grblUpload».В примере ничего менять не нужно, его нужно загрузить в Arduino UNO. Для этого, в пункте меню «Инструменты», выбираем плату «Arduino UNO» и порт, к которому подключена плата. В моем случае это «COM9».
Теперь мы можем загрузить прошивку GRBL в Arduino UNO. Для этого нажимаем на кнопку «Загрузить». После компиляции скетча, код будет загружен в микроконтроллер. И вы увидите надпись «Загрузка завершена».
Также вы увидите надпись оранжевого цвета «Недостаточно памяти, программа может работать нестабильно». Но не пугайтесь, все будет работать отлично.
Настройка электроники ЧПУ плоттера на Arduino.

Первым делом нам нужно определиться, какое деление шага поставить для нашего станка и затем рассчитать, сколько шагов будет делать шаговый двигатель, чтобы переместиться на 1 мм. по осям X и Y.
Деление шага.
Перед установкой драйверов необходимо установить перемычки деления шага. Что это такое, и для чего нужно деление шага, читайте в статье про драйвер A4988: «Драйвер шагового двигателя A4988». Я устанавливаю деление шага ½, потому что при увеличении деления шага падает мощность двигателя. У меня получается 400 шагов на мм, — этого вполне достаточно для плоттера.
Расчет деления шага.
Как же рассчитать деление шага, и сколько шагов нужно для совершения перемещения на 1 мм? Количество шагов, сделанных шаговым двигателем, для совершения перемещения станка на 1 мм, зависит от характеристик шагового двигателя, от передачи (винтовая или ременная), какое деление шага настроено (для разных драйверов деление шага настраивается по-разному, и количество отличается).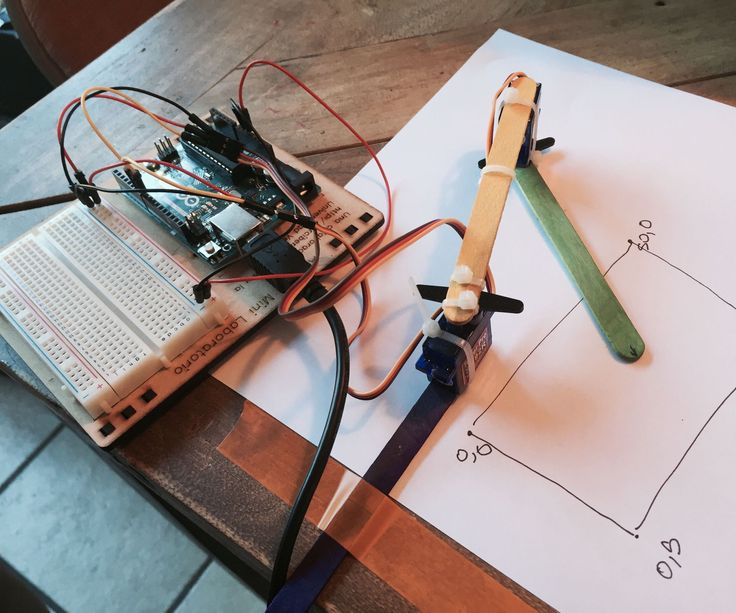 В моем случае, получаются следующие параметры:
В моем случае, получаются следующие параметры:
- Шаговый двигатель 17HS4401 совершает 200 шагов на 1 оборот вала. (Из характеристик двигателя).
- Шпилька, с метрической резьбой М6, перемещается на 1 мм. за оборот (табличное значение).
- Деление шага установил ½.
Количество шагов на 1 мм рассчитываем по формуле:
H = Sh*M/D где:
Н – количество шагов для перемещения на 1 мм.
Sh – количество шагов шагового двигателя для совершения 1 оборота.
М – перемещение при вращении ходового винта на 1 оборот.
D – установленное деление шага.
Н = 200*1/0,5 = 400 шагов для перемещения на 1 мм.
Данные параметры нам пригодятся при настройке GRBL.
Установка драйверов A4988 и настройка ограничивающего тока.
После установки деления шага, устанавливаем драйвер A4988 в разъёмы с надписью X и Y.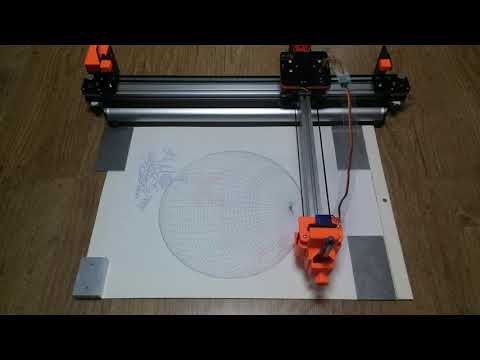 Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Расчет ограничивающего тока драйвера шагового двигателя A4988:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае, RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем, что рабочий ток двигателя равен 70% от тока удержания, то полученное значение нам нужно умножить на 0,7. В противном случае двигатели, в режиме удержания, будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Настраиваем ток шагового двигателя.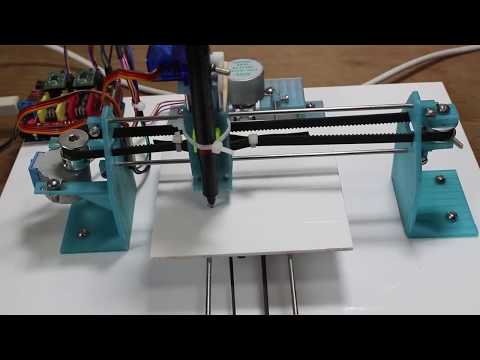
Для этого возьмём мультиметр, и один контакт подключим к контакту GND, а второй на переменный резистор драйвера. Поворачивая потенциометр на драйвере, подбираем нужное напряжение. На мультиметре у меня показания в мВ, поэтому такое большое значение.
Аналогично настраиваем ограничивающий ток для второго драйвера.
Внимание! Не забудьте установить радиатор охлаждения на драйвер шагового двигателя, в противном случае драйвер будет перегреваться.
Настройка GRBL ЧПУ плоттера.
Как настроить GRBL ЧПУ станка я уже рассказывал неоднократно. Например, в статье: «Установка grbl 1.1 на Arduino uno. Основы работы в программе LaserGRBL», рассказываю, как используя монитор порта Arduino IDE, настроить прошивку станка. А в статье «Установка и настройка программы LaserGRBL.», рассказываю, как настроить прошивку лазерного станка, с помощью управляющей программы LaserGRBL.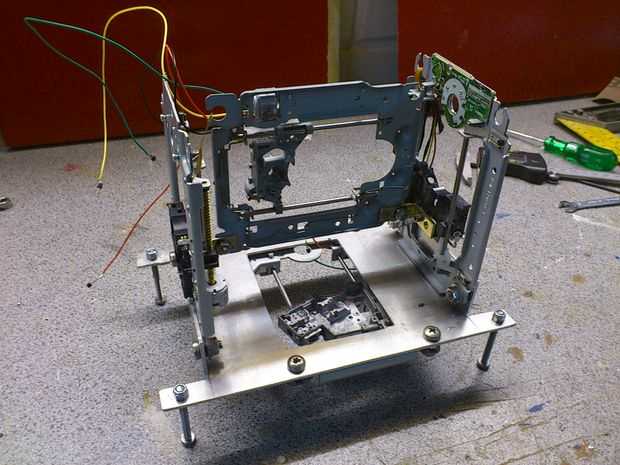
Плоттер можно настроить через монитор порта среды Arduino IDE или через управляющую программу «Universal G-Cod Sender», по аналогии с программой LaserGRBL. Для этого скачиваем программу с GitHub или внизу статьи в разделе «файлы для скачивания».
После установки, в операционной системе Windows, у меня выдало кучу знаков вопроса вместо русского текста.
Поменял язык на английский, и программа заработала нормально. Поэтому, покажу все настройки в англоязычной версии программы.
Для начала нам нужно подключить наш станок по USB кабелю к компьютеру. И программе выбрать порт скорость и нажать на кнопку «Open».
Затем переходим в меню «Setting -> Firmware Setting»
Откроется список настроек станка, нам нужно поменять параметры:Сколько нужно сделать шагов, чтобы наш станок переместился на 1 мм по оси X, Y. Для обеих осей это значение получилось 400.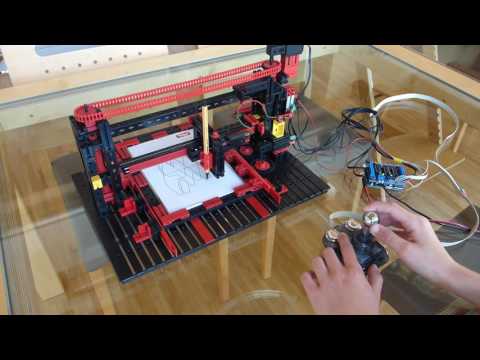 2.
2.
- $120=16.000
- $121=16.000
Наша прошивка настроена так, что сервопривод срабатывает на поднятие, когда подаем команду на перемещение по оси Z, также можно настроить некоторые параметры для данной оси.
- $102=400
- $111=500
- $121=50.000
Эти параметры можно указать больше. Подробнее о них расскажу в следующей статье.
Программа для создания G-Code и управляющая программа.
С выбором программы для создания G-code у меня возникла проблема. Но об этом расскажу в следующий раз, а сейчас напишу список программ, которые я использовал. В следующей статье расскажу, почему выбор пал именно на эти программы.
Inkscape.
Программа для работы с векторной графикой. В программе есть плагин для создания G-code, но для нашей работы не подходит. Делает двойную обводку. Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Carbide Create V5.
Carbide Create — бесплатная CAD/CAM программа, разработанная производителями небольших ЧПУ станков “Carbide 3D”. В данной программе можно создавать небольшие чертежи, а также генерировать G-Code из векторных рисунков формата .svg. Программа неплохая, но есть ряд минусов. О них в следующей статье.
Candle.
Candle – управляющая программа для ЧПУ станков. Она полностью на русском языке. Достаточно функциональная и при этом не сложная. Но нет простой настройки конфигурации GRBL.
Universal G-codeSender.
Отличная управляющая программа. В настройках можно выбрать русский язык. Но, к сожалению, на компьютере, с операционной системой Windows, постоянно возникают проблемы. Работал на ней в Linux, работает отлично. Использую данную программу для демонстрации простоты настройки конфигурации GRBL.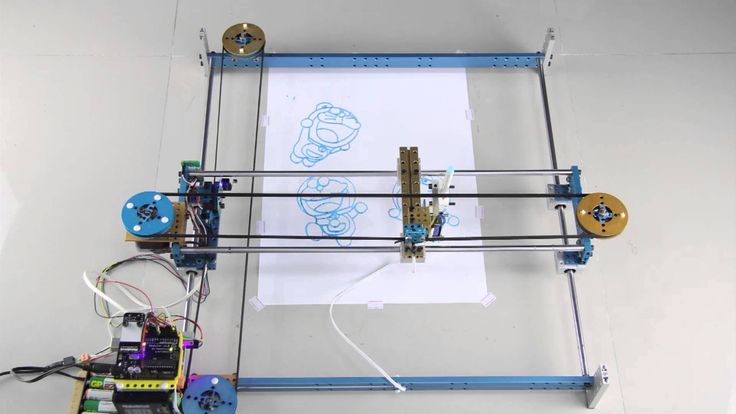
Продолжение в следующей статье.
Понравился проект ЧПУ плоттер на Arduino своими руками? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| Grbl Pen Servo.zip | 143 Kb | 1938 | Скачать | |
| Universal G-code Sender.zip | 28368 Kb | 1675 | Скачать | |
| Carbide Create.zip | 48999 Kb | 1557 | Скачать | |
Candle 1. 1.7.zip 1.7.zip | 29095 Kb | 1478 | Скачать | |
| драйвер Ch440G.zip | 186 Kb | 1319 | Скачать |
Самодельный перьевой плоттер с автоматической сменой инструмента
В этом уроке я покажу вам, как я построил перьевой плоттер с ЧПУ или чертежную машину, но с одной интересной функцией — автоматической сменой инструмента. Другими словами, машина сможет автоматически менять цвета, и мы сможем рисовать с ее помощью действительно классные вещи.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Обзор
Конструкция станка основана на моем самодельном станке для лазерной гравировки с ЧПУ из моего предыдущего видео, где целью было сделать самый простой станок с ЧПУ с минимальным количеством деталей. Он использует 3 шаговых двигателя NEMA 17 для перемещения по осям X, Y и Z, а также небольшой сервопривод для захвата.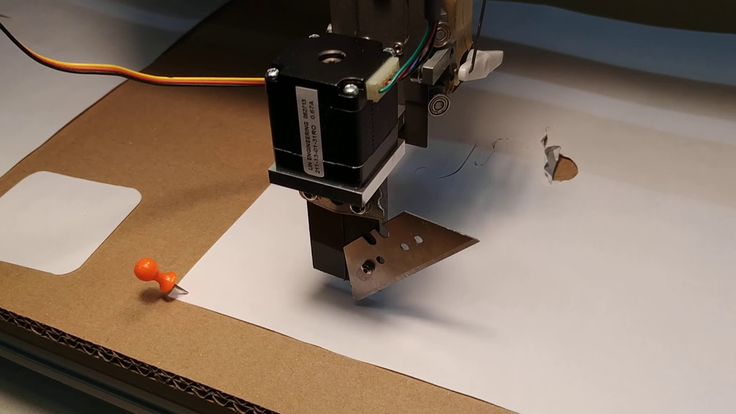 Мозгом этого плоттерного станка с ЧПУ Pen является плата Arduino UNO в сочетании с экраном с ЧПУ и тремя A49.88 шаговых драйверов.
Мозгом этого плоттерного станка с ЧПУ Pen является плата Arduino UNO в сочетании с экраном с ЧПУ и тремя A49.88 шаговых драйверов.
Рабочая область довольно большая, 360×280 мм, и уровень детализации, который может выводить этот перьевой плоттер, на мой взгляд, тоже впечатляет. Я был действительно удивлен, насколько хорошими и точными получились рисунки, особенно те, где я использовал гелевую ручку 0,6 мм.
Тем не менее, теперь я объясню все, что вам нужно знать о создании такой чертежной машины, в том числе о том, как ее спроектировать, подключить электронику, какую прошивку и программное обеспечение использовать и как сгенерировать для нее G-код.
3D-модель перьевого плоттера с ЧПУ своими руками
Для начала давайте посмотрим на конструкцию этого станка с ЧПУ. Как я уже упоминал, этот станок основан на конструкции моего предыдущего лазерного гравировального станка с ЧПУ, целью которого было сделать очень простой ЧПУ с минимальным количеством деталей.
Двумя основными компонентами являются линейные направляющие MGN15H вместе с соответствующими скользящими блоками.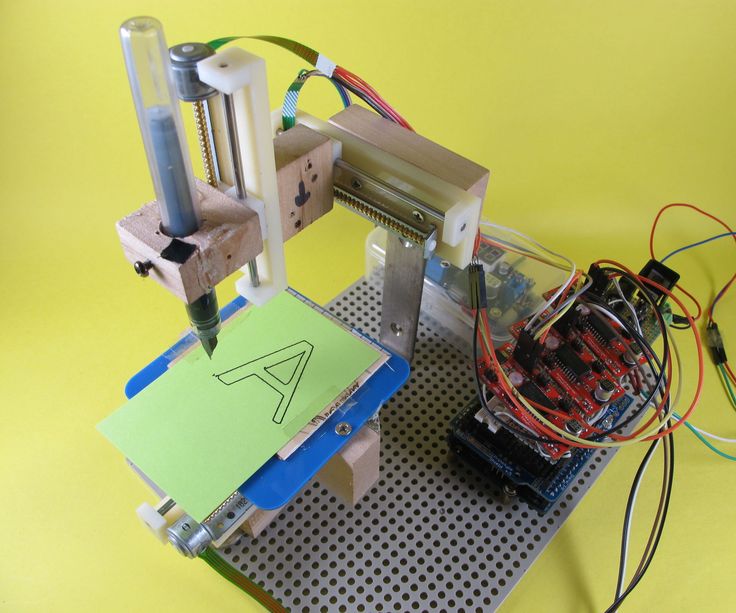 Движение по осям X и Y обеспечивается двумя ремнями GT2 и несколькими шкивами GT2. Что касается оси Z, у нас есть простое возвратно-поступательное движение, при котором движущаяся часть скользит вверх и вниз по двум линейным стержням 6 мм и подходящим линейным подшипникам. Небольшой хобби-сервопривод используется для захвата пера.
Движение по осям X и Y обеспечивается двумя ремнями GT2 и несколькими шкивами GT2. Что касается оси Z, у нас есть простое возвратно-поступательное движение, при котором движущаяся часть скользит вверх и вниз по двум линейным стержням 6 мм и подходящим линейным подшипникам. Небольшой хобби-сервопривод используется для захвата пера.
Процедура возврата в исходное положение необходима для этого перьевого плоттера, поскольку держатели перьев имеют определенное фиксированное положение, поэтому у машины должна быть начальная точка. Следовательно, мы должны иметь концевой выключатель для каждой оси.
Вы можете найти и скачать эту 3D-модель, а также изучить ее в своем браузере на Thangs:
Скачать сборную 3D-модель на Thangs.
Спасибо Thangs за поддержку этого урока.
Что касается файлов STL, которые используются для 3D-печати деталей, вы можете скачать их здесь:
Сборка машины
Вот все детали, необходимые для сборки перьевого плоттера.
Вот список компонентов, необходимых для сборки этого станка с ЧПУ своими руками. Список электронных компонентов можно найти ниже в разделе принципиальных схем статьи.
Список электронных компонентов можно найти ниже в разделе принципиальных схем статьи.
- Линейная направляющая MGN15H ………………………… Amazon / Banggood / AliExpress
- Линейная штанга 6 мм ……………………………….. Amazon / AliExpress
- Линейный подшипник 6 мм …………………………. Amazon / AliExpress
- Шаговый двигатель — NEMA 17 …………….… Amazon / Banggood / AliExpress
- Ремень GT2 + зубчатый шкив……………….…… Amazon
- Натяжной шкив GT2 ………………………….….… Amazon / Banggood / AliExpress
- Распорные гайки ……………………………….… …….. Amazon / Banggood / AliExpress
- Набор болтов и гаек ……………………………… Amazon / Banggood / AliExpress или в местном хозяйственном магазине + винты с плоской головкой 3×19 мм 90914 90 0 0 являются партнерскими ссылками.
 Как партнер Amazon я зарабатываю на соответствующих покупках.
Как партнер Amazon я зарабатываю на соответствующих покупках. Итак, теперь мы можем начать сборку машины. Я начал с крепления опорной плиты и кронштейна для линейной направляющей с помощью нескольких болтов M3. Все болты для сборки этой машины на самом деле M3 с различной длиной, за исключением нескольких болтов M5, необходимых для шкивов GT2.
Когда две стороны готовы, мы можем прикрепить к ним линейную направляющую оси X двумя болтами с каждой стороны. Эти направляющие MGN15H обеспечивают очень плавное движение без зазоров, так как в их скользящих блоках есть шарики или ролики.
Однако перед установкой их рекомендуется очистить и хорошо смазать, чтобы они работали должным образом.
Далее, направляющая оси Y должна быть наверху скользящего блока оси X, и для их соединения мы будем использовать центральную монтажную пластину. Во-первых, мы можем установить направляющую оси Y на центральную пластину с помощью трех болтов.
Затем мы можем установить два шаговых двигателя NEMA 17.
 Один идет на верхнюю сторону, а другой на нижнюю сторону пластины. Как я упоминал ранее, нам понадобятся болты и гайки M5 для установки шкивов GT2 на место. Два шкива здесь на самом деле являются натяжными шкивами, которые используются для обеспечения захвата ремня GT2 оси X, и зубчатого шкива, который идет на шаговый двигатель.
Один идет на верхнюю сторону, а другой на нижнюю сторону пластины. Как я упоминал ранее, нам понадобятся болты и гайки M5 для установки шкивов GT2 на место. Два шкива здесь на самом деле являются натяжными шкивами, которые используются для обеспечения захвата ремня GT2 оси X, и зубчатого шкива, который идет на шаговый двигатель.Что касается установки этого шкива, мы должны измерить и выровнять его по натяжным шкивам. Что касается оси Y, нам нужен только один натяжной ролик, который идет с другой стороны рельса, так как ремень для этой оси будет установлен в виде петли.
Ок, дальше брак или соединение двух осей вместе. Мы просто делаем это, прикрепляя центральную пластину к скользящему блоку оси X с помощью четырех болтов M3. Благодаря этому машина приобрела свою основную форму, и теперь скользящий блок оси Y может занимать любое положение в рабочей зоне.
Теперь мы можем продолжить сборку механизма подъема ручки. Этот механизм состоит из двух частей, одна из которых прикреплена болтами к скользящему блоку оси Y, а другая будет скользить вверх и вниз.
 Как только неподвижная часть закреплена на месте, мы можем установить на нее шаговый двигатель оси Z. Этот шаговый двигатель также соответствует стандарту NEMA 17, но он короче, 23 мм вместо 40 мм, чтобы уменьшить вес.
Как только неподвижная часть закреплена на месте, мы можем установить на нее шаговый двигатель оси Z. Этот шаговый двигатель также соответствует стандарту NEMA 17, но он короче, 23 мм вместо 40 мм, чтобы уменьшить вес.Затем мы можем установить подъемник, который просто крепится к валу шагового двигателя. Установочный винт, который у меня был, был длинноват для него, поэтому я прикрепил подъемник к валу без него, но его отверстие имеет форму вала, поэтому движение будет хорошо передаваться. На самом деле я немного изменил эту часть, но не беспокойтесь, вы получите ее обновленную версию в загружаемых файлах.
Затем я вставил четыре линейных подшипника в скользящую часть и закрепил микросервопривод на месте. Затем я также закрепил часть держателя ручки рядом с сервоприводом.
Чтобы соединить неподвижную и подвижную части вместе, сначала нам нужно пропустить провод сервопривода через отверстие в неподвижной части, а затем вставить 6-миллиметровые стержни сверху через подшипники и отверстие неподвижной части.
 При установке этого стержня мы также должны вставить пружину между неподвижной и подвижной частью таким образом, чтобы она толкала подвижную часть вниз.
При установке этого стержня мы также должны вставить пружину между неподвижной и подвижной частью таким образом, чтобы она толкала подвижную часть вниз.Это поможет ручке лучше контактировать с рабочей поверхностью. На нижней стороне неподвижной части есть отверстие, куда мы можем вставить гайки M3 и использовать их для крепления стержней 6 мм на месте.
Затем мы можем собрать блок держателя ручек, который идет с одной стороны машины. Он состоит из верхней и нижней части с отверстиями для размещения до 12 ручек.
Продолжил установку ремней. Для начала нам нужно отмерить нужную нам длину и отрезать примерно по размеру. Для крепления ремня к скользящему блоку я сделал вот такие крутые соединители для ремня, где ремень проходит вокруг полого вала и между двумя стенками, которые не позволяют ремню двигаться.
Используя болт М3, мы можем закрепить первый разъем на одной стороне блока и повторить ту же процедуру для другой стороны. Мы можем перемещать разъемы вдоль этих пазов здесь и натягивать ремень так, как мы хотим.
Что касается оси X, то ремень будет проходить по прямой от одной стороны к другой, проходя через шкивы таким образом, чтобы обеспечить натяжение или сцепление со шкивом шагового двигателя.
Для натяжения ремня оси X я сделал эти соединители, которые имеют форму ремня, поэтому мы можем притянуть их к бокам машины.
Далее мы можем установить концевые выключатели.
На самом деле я немного опустил этот концевой выключатель по оси Z, а что касается концевых выключателей X и Y, я использовал те, что были в моем предыдущем проекте, к которым уже были подключены провода.
Подключение электроники
На этом механическая часть машины готова и можно переходить к подключению электроники.
Как я уже упоминал, мы используем плату Arduino Uno в сочетании с экраном с ЧПУ и тремя A49.88 шаговых драйверов.
Для крепления платы Arduino к машине я сделал дополнительную 3D-печатную деталь, которая идет на боковой панели. Я закрепил плату Arduino двумя болтами M3, а поверх нее вставил шилд ЧПУ.
Здесь нам нужно вставить три перемычки для каждого драйвера шагового двигателя, чтобы выбрать разрешение 16 th /step, а затем мы вставляем драйверы шагового двигателя.
Затем мы можем правильно подключить двигатели к щиту ЧПУ. Для подключения микроконцевых выключателей на месте я просто припаял провода прямо к ним, а с другой стороны припаял штыревые разъемы, которые я получил от соединительных проводов.
Что касается серводвигателя, я использовал несколько удлинительных кабелей сервопривода, чтобы он мог добраться до экрана ЧПУ. Для питания станка нам понадобится блок питания 12В. Вот принципиальная схема того, как все должно быть подключено.
Электрическая схема самодельного ЧПУ-плоттера
Вот принципиальная схема того, как все должно быть подключено.
Вы можете получить компоненты, необходимые для этого проекта, по ссылкам ниже:
- Шаговый двигатель — NEMA 17……………… Amazon / Banggood / AliExpress
- Шаговый двигатель — NEMA 17 23 мм ….
 . Amazon / Banggood / AliExpress
. Amazon / Banggood / AliExpress - A4988 Драйвер шагового двигателя………………..…..… Amazon / Banggood
Express
Express Двигатель ………………………………….… Amazon / Banggood / AliExpress
- Arduino CNC Shield ……………………….. Amazon / Banggood / AliExpress
- Arduino Uno………………………………….… Amazon / Banggood / AliExpress
- Концевой выключатель ……………………………………. Amazon / Banggood /ALIEXPRESS
- DC Power Foodse ……………………………… Amazon / Banggood /Aliexpress
91939 /Aliexpress
3 Amazon 3 / AliExpress
9191993938/Aliexpress
919193938/ALIEXPRES Как партнер Amazon я зарабатываю на соответствующих покупках.
Итак, мы используем плату Arduino UNO в сочетании с CNC Shield и тремя шаговыми драйверами A4988. У нас есть три микровыключателя для возврата станка в исходное положение и небольшой серводвигатель для механизма захвата. Для питания нам понадобится блок питания 12v с минимальной силой тока 2 ампера.
У нас есть три микровыключателя для возврата станка в исходное положение и небольшой серводвигатель для механизма захвата. Для питания нам понадобится блок питания 12v с минимальной силой тока 2 ампера.
Завершение сборки машины
Осталось сделать несколько последних штрихов, чтобы закончить этот перьевой плоттер. Здесь я устанавливаю захват для пера, который просто присоединяется к серводвигателю через рожок сервопривода.
Для прокладки кабелей от подъемника для ручек я использовал коврик для обеденного стола, материал которого был прочным, но гибким, поэтому он идеально подходил для этой работы.
На этом наша чертежная машина завершена. Тем не менее, есть несколько вещей, которые мы должны отметить здесь. Поскольку направляющая оси Y не поддерживается с одной стороны, а сам материал PLA для 3D-печати не такой жесткий, при полном выдвижении подъемник пера был на 4 мм ниже по сравнению с поддерживаемой стороной.
Это слишком много, но мне удалось решить эту проблему, немного приподняв переднюю часть машины. Таким образом я уменьшил разницу примерно до 1 мм, что было приемлемо. если вы планируете использовать эти большие рельсы, я бы определенно предложил поддержать рельс оси Y с другой стороны.
Таким образом я уменьшил разницу примерно до 1 мм, что было приемлемо. если вы планируете использовать эти большие рельсы, я бы определенно предложил поддержать рельс оси Y с другой стороны.
Еще одна проблема связана с держателем для ручек, поскольку в этом случае ручки плохо удерживаются на месте. Здесь я бы предложил увеличить верхние отверстия и добавить немного мягкого материала по бокам, чтобы ручки оставались на месте, а машине было легко вставлять их.
Наконец, мы можем вставить доску под всю машину, чтобы получить ровную поверхность.
Вот и все, наша машина готова.
Прошивка и управляющее ПО для самодельного перьевого плоттера
Осталось дать ему жизнь или сделать из него настоящий станок с ЧПУ. Для этого нам нужно установить прошивку на Arduino для управления движением станка с ЧПУ, и нам нужно управляющее программное обеспечение, с помощью которого мы будем отправлять G-коды и сообщать станку, что делать.
Наиболее популярным выбором для станков с ЧПУ своими руками является прошивка GRBL с открытым исходным кодом. Однако для этого перьевого плоттера нам нужна его модифицированная версия, которая может управлять серводвигателем. Эта модифицированная версия, называемая «grbl-servo», изменяет частоту ШИМ по умолчанию для вывода управления шпинделем (или цифрового вывода номер 11) с 1 кГц до 50 Гц, что необходимо для управления этим типом серводвигателя.
Однако для этого перьевого плоттера нам нужна его модифицированная версия, которая может управлять серводвигателем. Эта модифицированная версия, называемая «grbl-servo», изменяет частоту ШИМ по умолчанию для вывода управления шпинделем (или цифрового вывода номер 11) с 1 кГц до 50 Гц, что необходимо для управления этим типом серводвигателя.
После того, как мы загрузим и установим эту прошивку GRBL в папку библиотеки нашей Arduino IDE, нам также необходимо изменить ее файл config.h, чтобы включить 3-осевое самонаведение вместо стандартного 2-осевого.
Что касается программного обеспечения для управления, мы будем использовать GRBL-Plotter, который предназначен для управления плоттерами и включает в себя графический преобразователь, с помощью которого мы можем генерировать G-код из наших изображений или графики. Это также программное обеспечение с открытым исходным кодом, которое можно загрузить с Github.
Здесь первое, что нам нужно сделать, это подключить нашу плату Arduino к программному обеспечению через подходящий COM-порт.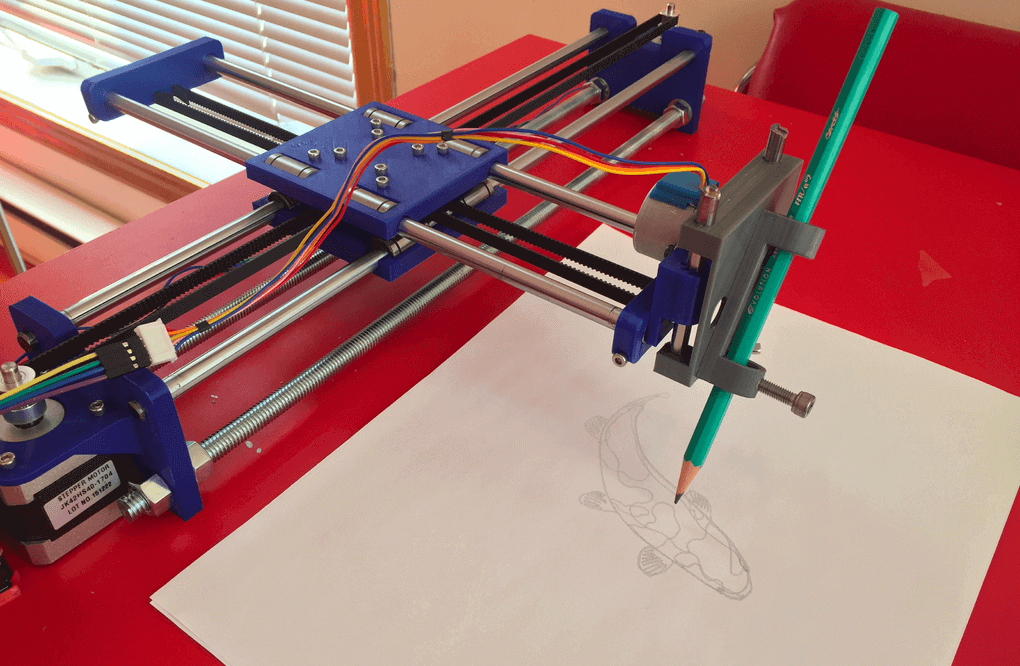 Как только мы нажмем кнопку «Kill Alarm», на последовательном мониторе мы получим список наших текущих параметров GRBL. Нам нужно изменить некоторые из этих параметров в соответствии с нашей машиной.
Как только мы нажмем кнопку «Kill Alarm», на последовательном мониторе мы получим список наших текущих параметров GRBL. Нам нужно изменить некоторые из этих параметров в соответствии с нашей машиной.
Параметры GRBL
Первое, что мы должны настроить здесь, это разрешение перемещения или значения шагов/мм. Эти значения показывают, сколько шагов должен сделать двигатель, чтобы переместиться на 1 мм. Это зависит от типа имеющегося у нас шагового двигателя, выбранного разрешения шага и передачи движения, в данном случае ремня и шкива GT2.
Для нашего станка требуется значение 80 шагов/мм, чтобы оси X и Y были точными. Что касается оси Z, я установил значение 40, что на самом деле не точно с точки зрения реального движения, но мы все равно не можем достичь этого с нашим возвратно-поступательным движением.
Мы также должны установить номер параметра 23 на 0, который сообщает, где расположены наши концевые выключатели, установить максимальную скорость подачи, ускорение, максимальную скорость перемещения и параметр номер 1 на значение 255, которое поддерживает работу шаговых двигателей.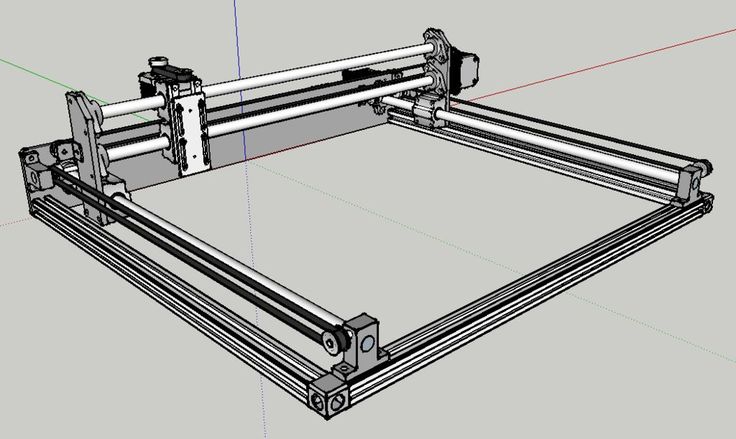 все время. Тем не менее, мы должны отметить, что при включении этой функции, особенно для шагового двигателя с осью Z, мы должны настроить предел тока драйвера A4988 на минимум, потому что более короткий шаговый двигатель NEMA 17 может быстро нагреться.
все время. Тем не менее, мы должны отметить, что при включении этой функции, особенно для шагового двигателя с осью Z, мы должны настроить предел тока драйвера A4988 на минимум, потому что более короткий шаговый двигатель NEMA 17 может быстро нагреться.
Настройка плоттера GRBL
Хорошо, теперь давайте посмотрим на настройку контроллера. Здесь так много вариантов настройки, что поначалу это может немного пугать. Здесь сначала нам нужно установить перемещение пера вверх и вниз по оси Z и установить значения для положения вверх и вниз.
На вкладке Таблица инструментов мы можем определить цвет перьев и их положение. Здесь следует отметить, что эти значения относятся к G53 или системе координат станка. Это означает, что они определяются жесткими концевыми выключателями машины и максимальным ходом, который мы установили ранее в параметрах GRBL.
Для определения положения каждого пера я использовал значения смещения, которые в данном случае равны 0 для оси X и 277 для оси Y. Эти значения располагают захват перед первой ручкой, а затем мне просто нужно было определить значение Y для каждой ручки, которое составляет 21,7 мм в отрицательном направлении.
Эти значения располагают захват перед первой ручкой, а затем мне просто нужно было определить значение Y для каждой ручки, которое составляет 21,7 мм в отрицательном направлении.
Здесь мы также можем отрегулировать скорость подачи и положение вверх и вниз для каждого пера отдельно, если это разные перья.
Затем в разделе «Смена инструмента» мы должны выбрать «Выполнить смену инструмента на Tx M06», что говорит станку выполнить смену инструмента, когда эта команда появляется в G-коде.
Значение «x» после буквы T указывает номер инструмента из таблицы инструментов. Чтобы выполнить смену инструмента, мы должны включить сценарии «выбрать» и «удалить», которые выполняются при появлении команды Tx M06. В этих сценариях мы определяем движение захвата, чтобы взять или удалить инструмент.
Для выбора пера захват сначала позиционируется перед фактическим пером в абсолютных координатах станка, определенных в таблице инструментов. Затем сервопривод открывает захват, он поднимается еще на 4 мм, затем движется к ручке в направлении X и немного в направлении Y. Затем захват закрывается, поднимает перо вверх и возвращается в то же положение перед выполнением сценария. Для удаления пера шаги сценария такие же, но в обратном порядке.
Затем захват закрывается, поднимает перо вверх и возвращается в то же положение перед выполнением сценария. Для удаления пера шаги сценария такие же, но в обратном порядке.
Разумеется, все эти параметры зависят от самих ручек, их размеров и размеров держателей. Единственный способ сделать этот процесс правильным — это протестировать и исправить значения.
Генерация G-кода для перьевого плоттера с ЧПУ с автоматической сменой инструмента
Наконец, давайте посмотрим, как мы можем генерировать G-код из изображений с помощью этого программного обеспечения GRBL-Plotter.
После того, как мы загрузили изображение, мы можем нажать «Предварительный просмотр с цветами из таблицы», чтобы увидеть, как будет выглядеть изображение. На вкладке коррекции изображения мы можем поиграть со значениями яркости, контрастности, гаммы и насыщенности, чтобы добиться цветов, похожих на реальное изображение или на те, которые нам действительно нужны. Мы можем установить размер вывода в мм, а в кране замены цвета мы можем удалить цвета, которые мы не хотим использовать.
Например, мы можем удалить абрикосовый цвет, который является белым цветом изображения. Затем мы можем нажать кнопку «Создать G-код», и G-код будет сгенерирован.
Мы также можем генерировать G-коды из файлов SVG, которые мы можем просто перетащить, и программа сразу же сгенерирует G-код.
Прежде чем мы начнем рисовать, мы должны установить нулевую позицию в любом месте рабочей области, а затем нажать кнопку воспроизведения.
Перьевой плоттер заработает, и мы сможем наслаждаться его волшебством.
Надеюсь, вам понравилось это видео и вы узнали что-то новое. Если у вас есть какие-либо вопросы, не стесняйтесь задавать их в разделе комментариев ниже.
Плоттер с ЧПУ | Хакадей
7 февраля 2022 г., Майкл Шауб
Запустите эти 3D-принтеры, потому что, если вы похожи на нас, вам нужен собственный PlottyBot. Тем не менее, у вас есть куча благодарственных писем, которые вы можете написать за недавний обмен подарками к зимним праздникам? Надеетесь вручить письменные приглашения на свадьбу или другое знаменательное событие? Нужны новые произведения искусства, чтобы украсить ваш закрытый приют или магазин? Похоже, [Бен] мог бы тебе в этом помочь.
Помимо красиво оформленного настольного DrawBot, этот проект от [Бена], похоже, имеет надежное программное обеспечение для его запуска, сообщество разработчиков, которые проверили воду, и очень подробные инструкции по сборке. К ним относятся все, от спецификации со ссылками для заказа деталей до анимированной сборки GIF для более сложных шагов.
Если вы хотите перейти от «рукописных» карточек и букв к чему-то размером с плакат, воспользуйтесь советами по настройке для расширенных размеров X и Y. Как мы упоминали в других недавних статьях, следует упомянуть об одном предостережении: в настоящее время не хватает Raspberry Pi Zeros, которые требуются PlottyBots. Но если у вас есть один бот под рукой или вы думаете, что сможете получить его к тому времени, когда вы напечатаете все детали на 3D-принтере, возможно, это идеальное время, чтобы добавить еще одного бота в свою семью. Напоминаем, что этот проект размещен на сервере, работающем от солнечной энергии, так что, возможно, по очереди прочитайте полный журнал сборки.
Приятный бонус, если вам нужна помощь в рисовании чего-то достаточно сложного, чтобы потребовалась помощь робота, [Бен] также создал MandalGaba, который выглядит как отличный онлайн-инструмент для рисования, подобных показанным выше.
Рубрика: Искусство, оборудование, Raspberry PiTagged искусство, плоттер с ЧПУ, рисовальщик, рисовальщик, перьевая ручка, почерк, рукописный ввод в шрифт, перьевой плоттер, плоттербот, raspberry pi, Raspberry Pi Zero 2 W
17 сентября 2020 г., Левин Дэй
Ошибка ЧПУ — обычное заболевание в этих краях. Часто пациенты проявляют постоянную одержимость машинами, управляемыми компьютером, чаще всего после первоначального контакта с шлюзовым оборудованием, таким как 3D-принтеры или простые плоттеры. Однажды поставленный диагноз не лечится — просто желание строить и строить снова. [Адам Хейл] слишком хорошо это знает и построил Киберплоттер на службе бедствия.
Cyberplotter — это кульминация списка желаний [Адама] с ЧПУ — двухосевая сборка с очень большой площадью сборки и возможностью установки целого ряда различных инструментов для разных задач. С рабочей зоной до 800 мм x 750 мм в зависимости от того, что установлено, он может производить очень большие результаты. С Smoothieboard 5X, управляющим шоу, [Адам] делает всевозможные изящные хаки, чтобы заставить систему работать с различными гаджетами на бизнес-конце. Есть лазер для гравировки и первоклассный перьевой плоттер с высококачественной линейной направляющей для точного перемещения. Но на этом веселье не заканчивается — [Адам] заходит так далеко, что устанавливает ось Z, камеру и даже аэрограф на основе Sharpie, о чем мы даже не думали раньше.
С рабочей зоной до 800 мм x 750 мм в зависимости от того, что установлено, он может производить очень большие результаты. С Smoothieboard 5X, управляющим шоу, [Адам] делает всевозможные изящные хаки, чтобы заставить систему работать с различными гаджетами на бизнес-конце. Есть лазер для гравировки и первоклассный перьевой плоттер с высококачественной линейной направляющей для точного перемещения. Но на этом веселье не заканчивается — [Адам] заходит так далеко, что устанавливает ось Z, камеру и даже аэрограф на основе Sharpie, о чем мы даже не думали раньше.
Это не первая сборка [Адама], и здесь виден прошлый опыт — вооружившись предварительными знаниями, сборка делает многие вещи хорошо, не ставя под угрозу явные возможности. Имя [Адама] может показаться вам знакомым — мы уже упоминали его Гравировщик на этих страницах. Видео после перерыва.
Продолжить чтение «Киберплоттер использует несколько инструментов для достижения большого успеха» →
Posted in cnc hacksTagged cnc, плоттер с чпу, плоттер
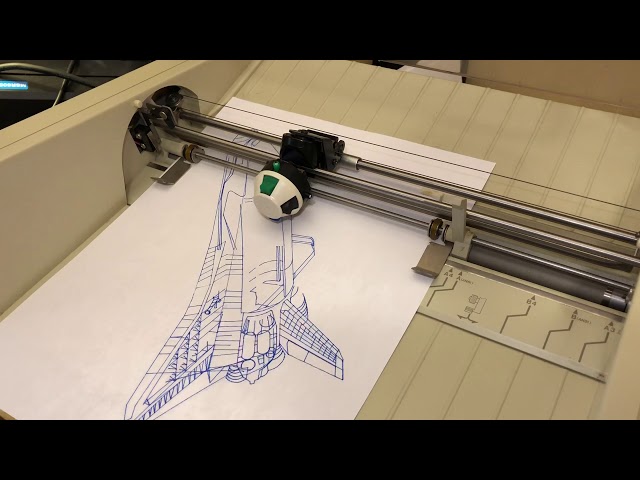
16 января 2015 г.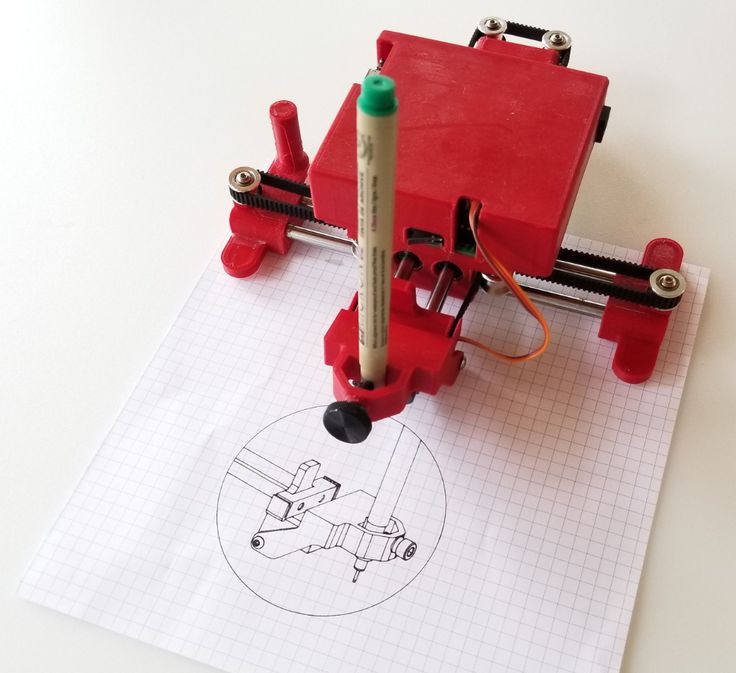 , Рич Бремер
, Рич Бремер
[Мортен] недавно был занят изготовлением перьевого плоттера. Это простая и элегантная конструкция, которую он полностью разработал с нуля. Здесь нет лишних фривольных деталей. Каркас изготовлен из плексигласа, вырезанного лазером, что упрощает изготовление, если у вас есть доступ к лазерному резцу. Два двигателя NEMA17 отвечают за движение машины. Каретка для пера перемещается вперед и назад с помощью ремня. Другой соединен с помощью вырезанных лазером шестерен с роликовым стержнем, извлеченным из струйного принтера, который перемещает бумажный носитель вперед и назад под ручкой.
Цепочка программного обеспечения, используемая здесь, довольно необычна по сравнению с другими недорогими станками с ЧПУ, которые мы видим здесь, на Hackaday. [Мортен] создает свою геометрию с помощью Rhino, а затем использует подключаемый модуль Grasshopper для создания g-кода, управляющего машиной. Этот g-код отправляется с помощью gRemote на Arduino с интерпретатором g-кода contraptor.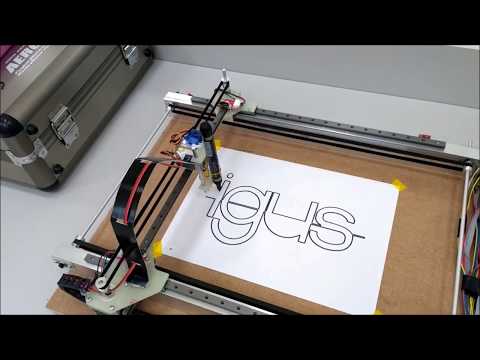 org. Плата RAMPS принимает сигналы шага и направления, генерируемые Arduino, и соответствующим образом перемещает два шаговых двигателя.
org. Плата RAMPS принимает сигналы шага и направления, генерируемые Arduino, и соответствующим образом перемещает два шаговых двигателя.
В типичной манере открытой поддержки [Мортен] сделал свои файлы дизайна бесплатными для скачивания любым пользователем. Его плоттер перемещает перо из стороны в сторону и бумагу спереди назад, чтобы рисовать фигуры, но это не единственный способ работы плоттера. Посмотрите на этот полярный плоттер и на тот, что висит.
Посмотрите видео после перерыва…
Продолжить чтение «Простой самодельный перьевой плоттер, отличный первый проект с ЧПУ» →
Posted in cnc hacks, NewsTagged cnc, плоттер с чпу, перьевой плоттер, плоттер
6 ноября 2014 г., Рич Бремер
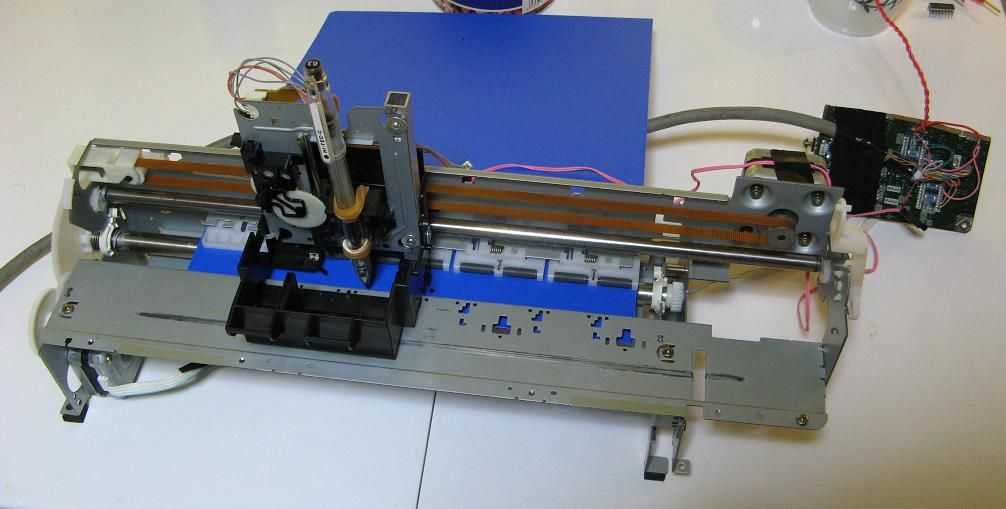
Можно утверждать, что окунуться в хобби с ЧПУ действительно может в конечном итоге стоить больше, чем ожидалось. Но это не должно быть причиной, чтобы удерживать кого-либо от этого! [msassa11] показывает нам, как сделать это в полной мере с его определенно уникальным и чрезвычайно недорогим самодельным плоттером.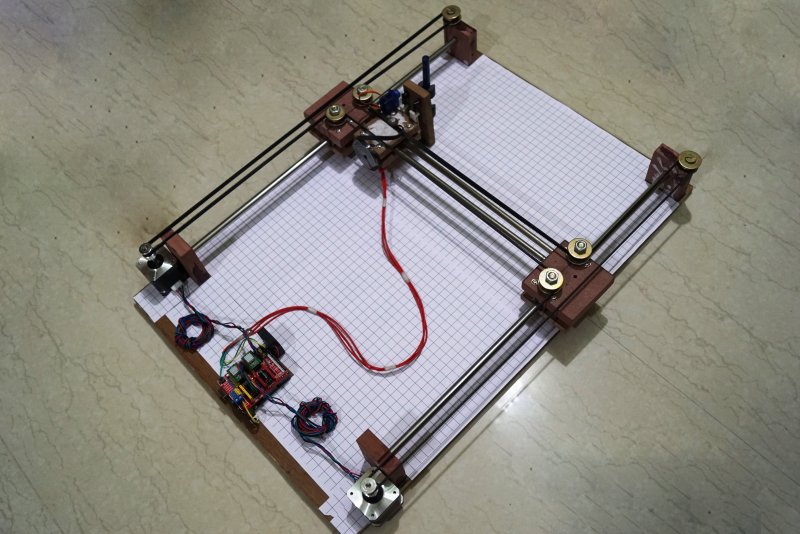
Цель разработки заключалась в том, чтобы сделать эту машину как можно более дешевой, в то же время используя материалы, которые можно найти в любой мастерской или, по крайней мере, купить на месте. Прежде всего, вы заметите, что линейный рельс всего один, да, один рельс для двух осей движения. Единственная направляющая была снята со струйного принтера вместе с ответной втулкой, которая первоначально позволяла печатающей головке свободно перемещаться вперед и назад. Ходовой винт с резьбовым стержнем выполняет здесь двойную функцию: не дает каретке оси X вращаться вокруг линейной направляющей, а также передает усилие для перемещения каретки вперед и назад. И ведущая гайка, и втулки удерживаются на месте с помощью литых эпоксидных опор.
Как бы ни была уникальна ось X, ось Y определенно дает ей преимущество в цене. Линейные рельсы не используются, только два ходовых винта поддерживают положение портала. Чтобы гравитация не тянула раму вниз и не изгибала ходовые винты оси Y, с обеих сторон имеется пара подшипников, которые перемещаются вдоль станины станка.
Всего комментариев: 0