В наличии! Станция Gardena 3000/4 01753-20.000.00 в Кемерово и Новокузнецке
Автоматическая станция бытового водоснабжения Gardena 3000/4 Classic Eco 01753-20.000.00 отличается Эко-режимом для экономии электроэнергии до 15%. На входе установлен фильтр предварительной очистки, который предотвращает попадание внутрь твердых включений. Предусмотрена сливная резьбовая пробка для быстрого слива воды, например, перед похолоданием. Данный агрегат применяется для постоянного водоснабжения на даче и организации полива сада или огорода. Благодаря автоматической системе защиты от перегрева обеспечена долговременная эксплуатация.
Характеристики:
Мощность, Вт 650
Защита от сухого хода нет
Высота подъема, м 40
Производительность, л/мин 46
Эжектор есть
Тип насосная станция
Объем бака, л 24
Глубина всасывания, м 8
Уровень шума, дБ 75/78
Материал корпуса пластик
Трубное соединение, дюймвнешняя G 1
Допустимая температура жидкости, °С+ 35°С
Давление, атм 1. 5
Класс защиты ipx4
Напряжение, В 220
Вес, кг 13.6
Производитель
Gardena
Высота подъема воды
40
м
Глубина всасывания
8
м
Производительность
46
л. /мин.
Станция бытового водоснабжения автоматическая Gardena 3000/4 Classic Eco
Товар закончился. Похожие товары в наличии
10 390 р. 11 750 р. -12%
Станция водоснабжения Вихрь АСВ-800/24
14 690 р. 16 670 р. -12%
Станция водоснабжения Вихрь АСВ-800/50
15 390 р. 17 390 р. -12%
Станция водоснабжения Вихрь АСВ-1200/50
9 990 р. 11 390 р. -12%
Станция водоснабжения Вихрь АСВ-800/19
10 990 р. 12 470 р. -12%
Станция водоснабжения Вихрь АСВ-800/24H
12 990 р. 13 790 р. -6%
Станция водоснабжения Вихрь АСВ-1200/24H
Автоматическое включение/отключение при отборе воды
Максимальная производительность (л/ч): 2800
Максимальная высота подачи (м): 40
Максимальная высота всасывания (м): 8
Давление (бар): 4,0
Мощность (Вт): 650
Соединительная резьба: G1
Длина кабеля (м): 1. 5
Размеры (Д х Ш х В) (мм): 478х 308х 650
Масса (кг): 13,6
Все характеристики
Поставка прекращена
15 775 ₽
Автоматическое включение/отключение при отборе воды
Максимальная производительность (л/ч): 2800
Максимальная высота подачи (м): 40
Максимальная высота всасывания (м): 8
Давление (бар): 4,0
Мощность (Вт): 650
Соединительная резьба: G1
Длина кабеля (м): 1.5
Размеры (Д х Ш х В) (мм): 478х 308х 650
Масса (кг): 13,6
Станция бытового водоснабжения автоматическая Gardena 3000/4 Classic Eco – это мощная насосная станция, предназначенная для водоснабжения частного дома и организации системы полива на приусадебном участке.
При отборе воды сначала расходуется вода из бака, а при понижении давления автоматически включается насос.
Плавный регулируемый Эко-режим экономит до 15% энергии по сравнению с обычным режимом. Имеет установленный на входе фильтр для защиты внутреннего механизма станции от попадания твердых включений. Двигатель оборудован системой защиты от перегрева.
Имеется специальный манометр для контроля рабочего давления. Также у данной насосной станции имеется пробка для быстрого слива воды и ножки для надежной установки аппарата во время работы.
Длина кабеля – 1,5 м, максимальная температура жидкости — 35ºC.
Старый артикул: 01770-20.000.00
Написать отзыв
Код изделия: 01753-20.000.00
Статусы товара
В наличии — товар есть на нашем складе, либо у поставщика в Санкт-Петербурге. Как правило, получить товар можно уже в день заказа, либо на следующий рабочий день. Редко возможна задержка на 1-3 дня.
Нет в наличии / Заказ — поставка в срок от 3-х до 30 дней. Для заказа некоторых товаров требуется предоплата.
Нет в наличии (длит. срок) — срок поставки не известен (для уточнения обратитесь к менеджеру по телефону), либо превышает 30 дней.
Откройте для себя наш ассортимент поливочных насосов Gardena
Новые продукты
Новые продукты
Последние статьи в блоге
Дождевальный насос — незаменимый аксессуар, который сочетает в себе удобство, надежность и легкость. Среди всех доступных моделей вы можете выбрать между поверхностным насосом, погружным насосом или насосной станцией.
Сетка
Список
Товаров: 16.
Сортировать по:
Релевантность
Showing 1-16 of 16 item(s)
Quick view
Last items in stock
3500/4th Classic Gardena pumping station
€213. 83
The Насосная станция 3500/4E Classic GARDENA идеально подходит для полива сада или воды. Очень легко включается, он также оснащен информативными диодами для сообщения об инцидентах в работе.
Быстрый просмотр
В наличии
Насосная станция 5000/5E LCD Comfort -…
313,42 €
Насосная станция 5000/5E LCD Comfort GARDENA идеально подходит для полива сада или воды. Очень легко включается и оснащен ЖК-экраном (24 языка), показывающим рабочие инциденты и действия по их устранению.
Быстрый просмотр
Нет в наличии
Разрыв со склада
Нет в наличии
Автоматический насос из нержавеющей стали 5900/4…
251,33 €
Автоматический насос из нержавеющей стали 5900/4 GARDENA — эффективное решение для всех ваших потребностей в поливе. Идеально подходит для глубоководья, практически бесшумен и полива вашего сада.
Quick View
Последние предметы в складе
Премиум 6000/6E Нестандартная сталь LCD …
€ 379.17
Премиум 6000/6E PREM 1000/6E PREM 1000/6E PREM 1000/6E PREM 1000/6E PREM 1000/6E PREM 1000/6E PREM 1000/6E Начат LADIMA LADEMA LADEMA LADEMA LADEMALING. полив огорода или воды. Очень легко включается и оснащен ЖК-экраном, показывающим рабочие инциденты
Quick View
Последние предметы в запасе
Группа избыточного давления 3700/4 Gardena
€ 158,75
. водоснабжение дома и сада.
Быстрый просмотр
Нет в наличии
Разрыв в наличии
Нет в наличии1
039 Умный напорный насос GARDENA Kit
499,17 €
Умный напорный насос идеально подходит для подачи воды в дом и полива сада. The smart Gateway case is the heart of the smart system GARDENA
Quick view
Last items in stock
6100/5 automatic stainless steel pump.
..
€289.58
The Автоматический насос из нержавеющей стали 6100/5 GARDENA — эффективное решение для всех ваших потребностей в поливе. Идеально подходит для глубоководья, практически бесшумен и полива вашего сада. Он гарантирует хорошую производительность благодаря высокой пропускной способности.
Быстрый просмотр
Насос для поверхностного орошения 3000/4 — GARDENA
112,33 €. или цистерна для полива вашего сада. Очень прочный
Быстрый просмотр
Последний на складе
4000/5 Насос для поверхностного полива…
210020 € 94.0100011
Легкий, мощный и быстродействующий насос для поверхностного полива 4000/5 Comfort позволяет GARDENA забирать воду непосредственно из колодца, скважины или цистерны для полива вашего сада.
Quick View
Последние предметы в складе
5000/5 Comfort Surafce Водяной насос .
..
€ 278,42
ИЗ Насос для поверхностного полива Comfort позволяет GARDENA забирать воду прямо из колодца, скважины или цистерны для полива вашего сада.
Quick View
Последние предметы в складе
6000/6 Премиум из нержавеющей политики …
€ 305.83
Мощный, тихий и проницательный, премиум 6000/6 € 305.83
мощный, тихий и устойчивый поливочный насос позволяет GARDENA забирать воду непосредственно из колодца, скважины или цистерны для полива вашего сада.
Быстрый просмотр
Последний на складе
3500/4 Classic Насос для поверхностного полива…
172,67 €
Насос для поверхностного полива 3500/4 Classic отличается легкостью и быстротой запуска, что позволяет GARDENA набирать воду непосредственно из колодца, скважины или цистерны для полива сада.
Quick View
OFT Stock
Rupture de Stock
Остановка
резервного въезда с 38 мм (1 1/2 «) .
..
46,33 €
Резервный шланг с зажимным шлангом 38 мм (1 1/2″) GARDENA позволяет очень быстро сливать или перекачивать воду. Очень прочный, поставляется с хомутом диаметром 38 мм
Быстрый просмотр
Последний на складе
Насосная станция Smart Pressure Pump…
414,25 € Вода идеально подходит для подачи воды в умный дом. При подключении к интеллектуальной системе GARDENAdevice всеми функциями помпальной станции можно легко управлять дистанционно в любое время благодаря умному приложению GARDENA
Быстрый просмотр
Только онлайн
Комплект насоса для поверхностного полива 3000/4 -…
164,25 €
Компактный дождевальный насос 3000/4 GARDENA является оптимальной универсальной базовой моделью. Высокая мощность всасывания и напора делает этот насос идеальным инструментом для полива.
Quick View
Последние предметы в складе
Насос для утилизации воды 11000 .
..
€ 120,08
11000 Aquasensor Gardena Clear Ploun помещение на случай повреждения водой (протечка стиральной машины, ванны и т.п.) или для опорожнения бассейна
3000/4 Classic, 5000/5 Eco и 4000 Comfort продукция, отзывы
В настоящее время многие в частных домах стремятся использовать для водоснабжения жилища собственную скважину или колодец. Но для прерывистой подачи воды с хорошим напором требуется специализированная насосная станция. На рынке техники для дома представлен достаточно большой выбор данных агрегатов. Особого внимания заслуживает насосная станция Gardena. О том, что это такое, и какие виды выпускает данный производитель, пойдет речь в этой статье.
О производителе
Компания Gardena была основана в 1961 году в Германии и с тех пор прошла долгий путь в своем развитии, завоевав лидирующие позиции на мировом рынке садоводства и домашнего хозяйства. Среди продукции этой компании вы найдете все, чтобы ваш приусадебный участок радовал вас, не отнимая много времени при уходе за ним. Gardena производит арматуру для систем полива, садовый инвентарь, газонокосилки, а также бытовые насосы и насосные станции.
Особенности
Насосные станции Gardena предназначены для подачи воды из внешнего источника, например колодца, и представляют собой целый комплекс оборудования. Они состоят из самого насоса, гидроаккумулятора, а также системы управления.
С помощью этого агрегата вы сможете не только обеспечить дом в несколько этажей бесперебойным водоснабжением, но и организовать полив в своем саду, используя, например, бак для дождевой воды.
Станция бытовой воды Gardena может работать автономно. Благодаря гидроаккумулятору накапливает определенное количество воды и некоторое время может работать без электропитания. Поэтому эти насосные станции можно устанавливать даже в местах, где часто отключают электричество.
Работает напорная станция Gardena следующим образом. Реле давления, установленное в данном агрегате, автоматически контролирует уровень давления в резервуаре для воды. При уменьшении количества жидкости в баке включается насос, который наполняет бак до уровня, необходимого для подачи жидкости под давлением. При этом давление в гидроаккумуляторе можно регулировать до нужных вам параметров, тем самым изменяя напор подаваемой воды.
Насосные станции Gardena могут быть дополнительно оснащены фильтром механической очистки. Будет необходимо, если вода поступает из загрязненного источника. Но если в вашем колодце много посторонних растворенных примесей, например, ржавчины или различных солей, то вам потребуется установка дополнительных фильтров для обеспечения дома питьевой водой.
Напорные станции этого производителя поверхностны. Их монтируют возле источника водоснабжения. Вода поступает в устройство с помощью трубы, опущенной в колодец или колодец.
Планируя круглогодичное использование данного устройства, в процессе его установки необходимо учитывать тот факт, что устройство не может работать в условиях отрицательных температур. Поэтому его следует устанавливать в отапливаемом помещении, а трубы от него до жилища прокладывать ниже уровня промерзания грунта.
Преимущества и недостатки
Водяные станции Gardena имеют ряд преимуществ:
Как и большинство устройств, произведенных в Германии, эти устройства отличаются высоким качеством и соответствуют всем международным стандартам для данного типа устройств.
Срок службы этих насосных станций достаточно большой. Но чтобы устройство прослужило вам долгие годы, ему необходим периодический технический осмотр и устранение мелких недостатков. Производитель дает гарантию на бак в 5 лет, но по истечении этого времени можно заменить только этот накопительный элемент, при этом на станцию в целом тратиться не придется.
При работе практически всех моделей агрегатов их практически не слышно. Уровень шума минимальный.
Большинство моделей ГЭС оснащены системой Eco, которая не позволяет прибору работать, если в него не поступает вода.
Насосные станции данного производителя представлены четырьмя типами моделей, что позволит выбрать агрегат с наиболее оптимальными для вас параметрами.
Более дорогие модификации агрегатов оснащены жидкокристаллическим экраном, по которому можно следить за параметрами прибора.
К каждой насосной станции в комплекте есть подробная инструкция, которая расскажет обо всех тонкостях установки и эксплуатации данного агрегата.
К недостаткам напорных станций Gardena можно отнести лишь цену некоторых моделей, но она полностью оправдывается качеством устройства, которое способно безотказно работать долгие годы.
Как выбрать
На выбор насосной станции Gardena для дачи или жилого дома влияет несколько аспектов:
Необходимое количество воды. Станцию нужно выбирать в зависимости от того, сколько санузлов в вашем доме, и сколько людей проживает в доме. Не стоит приобретать агрегат с большим запасом воды, если он вам не нужен, потому что вода в баке будет застаиваться и терять свой вкус. Так, для дачи, где проживает небольшая семья, достаточно приобрести станцию с гидроаккумулятором на 25 литров и объемом перегоняемой жидкости до 4000 литров в час.
Максимальная глубина и высота подъема воды. В зависимости от того, на каком расстоянии от поверхности воды находится вода, вам понадобится различная мощность устройства. Насосные станции Gardena рассчитаны на глубину воды до 8 м. Высота, на которую устройство может поднять воду, варьируется от 25 до 50 метров.
Дополнительные функции. Лучше выбирать устройства с защитой от перегрева и сухого хода. Они остановят работу устройства, если на него не подается жидкость, а также в том случае, если температура привода превысит допустимые параметры.
Виды
Насосные станции Gardena представлены в нескольких вариантах. Вот самые популярные из них:
Gardena 3000/4 Classic 1770
Этот агрегат можно отнести к самым доступным, поэтому он самый популярный на нашем рынке. Он оснащен баком на 25 литров, способным поднимать воду с глубины 8 метров и подавать ее на сорокаметровую высоту. Производительность устройства 2800 л/ч. Мощность устройства составляет 650 Вт.
Этот прибор вполне подойдет для обеспечения водой или небольшого частного дома. В комплект входит фильтр грубой очистки воды, а прибор оснащен функцией защиты от перегрева и механическим барометром. Экосистема в устройстве отсутствует.
Стоимость насосной станции Gardena 3000/4 Classic около 12 000 руб. Более новая версия этого устройства — Gardena 3000/4 Classic Eco — оснащена системой защиты от сухого хода, но такая станция будет стоить около 17 000 рублей.
Gardena 4000/5 Comfort
Самая надежная насосная станция в модельном ряду данного производителя. Мощность устройства составляет 850 Вт. Установка способна поднимать воду с глубины 8 метров, подавать ее на высоту до 45 метров и перегонять до 3500 литров в час. При этом емкость гидроаккумулятора, как и в предыдущей модели, составляет 25 л.
Устройство имеет ЖК-экран, оснащено системой термозащиты и защитой от сухого хода. К данной насосной станции можно подключить дополнительный насос. Но это устройство достаточно шумное, уровень шума составляет 90 дБ. Поэтому, если вы устанавливаете насосную станцию в жилом доме, то помещение, где будет располагаться агрегат, потребует дополнительного утепления. Стоимость модели Gardena 4000/5 Comfort около 23 000 рублей.
Gardena 5000/5 eco Premium inox
Самая мощная насосная станция из всего модельного ряда этого производителя, способная перегонять до 4500 литров воды в час. Давление, которое агрегат нагнетает в систему, составляет 5 бар. Он способен поднять воду на высоту до 50 метров. Станция оснащена нержавеющим баком, системами защиты от перегрева и сухого хода, а также режимом экономного энергопотребления. Стоимость этого устройства составляет около 33 000 рублей.
Отзывы
Покупатели отзываются о бытовых водопроводных станциях Gardena преимущественно положительно.
Неочевидные на первый взгляд, но дико полезные при умении пользоваться.
Сложно представить современный покер без обилия используемых покерных программ, таких как Holdem Manager 2. Цель одних – дать понять вам, кем являются ваши оппоненты, показать слабости в их игре. Другие же помогут вам понять теорию и математику покера в кратчайшие сроки.
Получи бесплатный курс по покеру. Каждому ученику чарты стартовых рук и крутой софт в подарок.
— Ты сформируешь крепкую покерную базу — Научишься работать с софтом — Узнаешь стратегии на каждый этап игры
На занятиях тренер составит тебе индивидуальный план развития.
Выбирай себе курс и оставляй заявку!
Подобрать курс
Далеко не все игроки уделяют достаточно времени работе над игрой вне столов. Но без программ по сбору статистики покера в нынешних реалиях не обходится практически никто. И сегодня у меня для вас, уважаемые читатели, несколько стат, которые могут быть крайне полезны для эксплоита (использования слабостей) ваших оппонентов. В то же время они не являются очень популярными и не присутствуют в HUD’ах большинства игроков. А даже если и присутствуют, то многие просто не понимают, как с ними работать и использовать.
Наша сегодняшняя тройка героев. Вся троица предоставляет вам общую информацию по постфлоп игре оппонента. Правильно понимая показатели данных пунктов статистики, можно понять, склонен ли ваш оппонент часто блефовать на постфлопе или же играет по карте. А также есть ли у него склонность к «лайтовым» коллам на ривере, т.е. коллам ваших ставок со слабыми руками.
WTSD% (Went to Showdown% (when saw flop)) – доход до шоудауна после увиденного флопа. Данная стата отображает, как часто ваш оппонент, оказавшись на флопе, доходит до вскрытия.
Действительно сильные, достойные вскрытия комбинации покера на постфлопе в среднем сдаются всем одинаково часто. Поэтому чем выше показатель этой статистики, тем чаще ваш оппонент оказывается на шоудауне со слабой или средней рукой, либо же со вскрытым блефом.
Средними показателями WTSD% будут числа от 24 до 28. Чем больше – тем чаще, так или иначе, ваш оппонент вскрывается, не имея сильной комбинации.
W$SD%, он же WonSD% (Win on Showdown%) – частота выигрыша на вскрытии. Этот показатель напрямую связан и наиболее эффективно работает в паре с предыдущим. Достаточно очевидно, что чем чаще оппонент доходит до шоудауна (а значит вскрывает не только сильные, но и средние комбинации, и, возможно, часто неуместно блефует), тем реже он на нем выигрывает.
Средними показателями являются числа от 46 до 58. Ниже вы не увидите почти никогда – это показатель откровенно слабых игроков, которые вообще не умеют ничего выбрасывать. Выше – практически нереально математически. В паре с предыдущей статой, средние показатели пары WTSD – W$SD у разных игроков будут варьироваться примерно от 24%-58% до 28%-46%
Низкий показатель WTSD (23-25%) и высокий W$SD (55-58%) означает, что оппонент играет постфлоп исключительно по карте и, возможно, является фит-о-фолдером (fit-or-fold – попал в доску или выбросил). Такие оппоненты редко блефуют (успешно, если W$SD ближе к 58, и неуспешно, если W$SD 55 или ниже).
Примерные показатели фит-о-фолдера
Средний WTSD (25-27%) и средний W$SD (51-55%) может означать как очень сильного и в меру лузово-агрессивного игрока с уместными блефами, так и игрока, не очень сильно понимающего постфлоп и иногда теряющегося по ходу раздачи. Именно подобные показатели имеет большинство сильных игроков.
Статистика «среднего» оппонента. Понять его лучше нам поможет третья статистика
Высокий WTSD (27-29%) и низкий W$SD (46-51%) вашего оппонента означает, что он часто доходит до шоудауна и проигрывает на нем, не имея сильной руки. Также это может означать, что он может неуместно блефовать на не очень подходящих досках, либо просто блефовать где попало (чем ниже W$SD, тем хуже он блефует).
Показатели слабого игрока, часто вскрывающегося со слабыми руками
Изредка вы можете увидеть игроков, имеющих не подходящие ни под один из примеров связки этих двух стат. Например, игрока с WTSD 28 и W$SD 56. Скорее всего, человек является очень сильным регуляром. Он умеет и чекнуть сильную руку на ривере на опасной доске, удержавшись от плохого вэлью бета, и грамотный тонкий вэлью бет поставить, и правильно блефануть. Но как правило зависимость этих двух статистик линейная. Чем выше WTSD в покере, тем ниже W$SD.
Для того, чтобы разобраться в игроках со странными статами WTSD и W$SD, а также для полного понимания типа вашего оппонента, нам поможет третья стата из нашей убийственной связки.
W$WSF (Won when saw flop) отображает, как часто ваш оппонент выигрывает банки на постфлопе в принципе. Средние показатели игроков – от 42 до 52. Если взять абсолютно средний показатель, не привязанный к игроку, то он будет ниже 50%. Многие этого не понимают. Это происходит из-за того, что в некоторых банках вы оказываетесь не хедз-ап (вдвоем), а втроем или более (мультипот). В мультипоте ваш средний теоретический шанс в покере выиграть банк гораздо ниже. Например, в банке на троих такой шанс составляет 33,3%. Потому и абсолютно средний показатель W$WSF будет ниже 50%.
Если ваш оппонент является фит-о-фолдером и вскрывается только со своими лучшими руками на ривере, значит он часто фолдит на флопе или терне. Поэтому у него этот показатель будет крайне низким, в районе 42. Такие игроки выигрывают много по синей линии графика (выигрыш на вскрытии) и проигрывают много по красной (выигрыш без вскрытия).
Закономерно низкий W$WSF фит-о-фолдера.
Низким он будет и у оппонентов, часто и глупо блефующих. Ведь их блефы будут часто вскрываться.
Закономерно низкий W$WSF слабого игрока, часто блефующего и вскрывающего свои мусорные руки.
Самым высоким этот показатель будет у наиболее сильных и опытных игроков. Ведь именно они выигрывают максимально возможное количество банков как с сильной рукой, так и с блефом, не совершая при этом неоправданных блефов. На микролимитах такого не бывает.
Показатель больше 50% встречается крайне редко. Для этого игрок должен обладать просто феноменальным и чуть ли не идеальным пониманием игры и структур досок. Пример о WTSD 28% и W$SD 56% – это как раз о таких игроках.
Среди неплохих регуляров чаще встречается показатель, равный 46-48. Это значит, что игрок выигрывает не только с сильными руками, но умеет и украсть банк у своего оппонента грамотным блефом. Блефы такого игрока имеют положительное математическое ожидание и, в среднем, тоже приносят ему деньги.
Так вот, дополняем пример из предыдущей части статьи W$WSF’ом. Высокий WTSD (27-29%) и низкий W$SD (46-51%) означает, что на вскрытии оппонент часто проигрывает. Но! Если при этом у него огромный показатель W$WSF в покере – это может означать, что он проворачивает еще большое количество и успешных блефов тоже. И может оказаться весьма достойным игроком с хорошим винрейтом.
Дополняем W$WSF’ом оппонента из предыдущей части статьи – он оказывается сильным регуляром!
Вот таким интересным способом работает данная связка статистик.
Напоследок оговорюсь, что для правильного анализа на основе нашей «убийственной связки» нужно иметь хорошую выборку рук на вашего оппонента. На короткой дистанции, под влиянием фактора удачи эти статистики имеют тенденцию очень сильно удаляться от реального показателя и выдавать вам неверную информацию. Это, в свою очередь, наверняка приведет к неверным выводам. Думаю, дистанции от 10-20 тысяч раздач будет достаточно, чтобы эти статы были более-менее показательными.
Мой покер ВОД о статах HM2:
Конечно, чтобы наиграть такое количество раздач против одного оппонента, нужно противостоять ему очень часто. Но в век современного онлайн-покера и наличия майнинга для всех, обзавестись огромной выборкой рук на оппонента не составит особого труда. Однако если у вас все-таки нету подходящих оппонентов для анализа, вы всегда можете оценить свои показатели и сделать выводы о собственной игре. Это может указать вам на ваши лики (от англ. leak – ошибки) в игре и устранить их.
На курсах по турнирному покеру IRON-MTT наши тренеры большое внимание уделяют работе с покерными программами. Обучение стоит $150, но сейчас у нас действует акция, и вы можете пройти курс абсолютно бесплатно! Также в подарок вы получите тот самый Holdem Manager 2 – тренеры помогут установить и разобраться. Кликайте на баннер и записывайтесь!
WTSD, WWSF, WonSD в покере — самые важные статистические показатели
Профессиональные игроки принимают решения за столом, в том числе ориентируясь на статистику соперников. Она отображается в виде числовых параметров в специальном инструменте HUD. WTSD в покере — это один из ключевых статов постфлопа. Он показывает, как часто игрок доходит до вскрытия. Для принятия прибыльных решений необходимо соотносить его с действиями на префлопе и показателями W$WSF и Won$SD.
Статистика и ее показатели (WTSD, WWSF, WonSD) в покере
Статистика крайне важна для профессионального онлайн игрока в покер. Однако насколько бы крупной ни была собранная база рук, она бесполезна без правильной интерпретации. Это одно из главных заблуждений начинающих регуляров. Миллионы раздач в Holdem Manager не обеспечат преимущество сами по себе.
Новички легко разбираются в статистике на префлопе и быстро учатся определять диапазоны. Но WTSD, WWSF, W$SD вкупе с другими постфлоп-показателями помогают понять, как именно соперник поступает с выбранными для розыгрыша картами.
Умение связывать цифры между собой и представлять, как они формируют стиль соперника — вопрос опыта и тренировок. Но владение этим навыком делает стратегию эффективнее за счет лучшего выбора ситуаций для своевременного блефа, баррелинга или пот-контроля.
WTSD
WTSD расшифровывается как Went to Showdown. Стат отображается в виде процента от количества раздач, в которых игрок посмотрел флоп.
Значение стата зависит от позиции
Интерпретируя показатель, необходимо помнить, что на него влияют:
Игровой стиль покериста.
Размер эффективного стека и SPR.
Позиции и действия оппонентов на префлопе.
Разновидность и формат игры.
Выборка рук (чем больше, тем репрезентативнее информация).
Все соперники с одинаковой частотой получают слабые, средние и сильные руки. Однако WTSD различается, потому что подход к их розыгрышу разный. Кому-то достаточно пары, чтобы коллировать три ставки и перейти к вскрытию. А кто-то действует осторожно и готов на опасном борде расстаться даже с сетом.
Важность WTSD в покере
WTSD% подсказывает, как можно эксплуатировать оппонента. Его средние значения находятся в районе 23-29%. Чем ниже число, тем осторожнее соперник. Он склонен выбрасывать в пограничных ситуациях и на опасных бордах.
Если HUD показывает значение ниже 24%, разумно рассматривать оппонента как мишень для недорогих блефов. У некоторых сторонников тактики fit or fold проход до шоудауна и вовсе может быть меньше 20%.
Пример статов фит-о-фолдера
Но и высокий WTSD% не говорит о силе. Он характерен для лузово-пассивных «телефонов» и маньяков, которые либо до последнего коллируют, либо сами активно накачивают банк фишками. У сильного соперника WTSD редко опускается ниже 26%.
WTSD для разных форматов и дисциплин
Частота прохода до шоудауна связана с префлоп-стратегией. Чем шире диапазон стартовых рук у соперника, тем реже ему приходится доводить их до шоудауна. Кроме того, значение также зависит от агрессии. Сильные регуляры часто выбивают оппонентов и забирают банк без вскрытия.
Поэтому средние значения отклоняются в зависимости от формата покера:
За столами 9-макс WTSD выше, чем в 6-макс, потому что префлоп-диапазоны участников уже.
В хедз-апе соперникам приходится использовать широкие спектры и активнее блефовать. Непозволительно часто сдаваться без готовой руки, иначе оппонент будет много выигрывать без шоудауна.
В МТТ участники дорожат турнирной жизнью и действуют скованнее под влиянием ICM. И чем позднее стадия, тем ниже WTSD (это связано еще и с переходом в пуш-фолд).
Омаха, в отличие от Холдема, позволяет игрокам чаще попадать в комбинации и дро. Поэтому они активнее вскрывают друг друга и оказываются на шоудауне.
WWSF — что это за показатель
W$WSF расшифровывается как Won Money When Saw Flop. WWSF в покере — это показатель, отображающий структуру постфлоп-рук соперника. Например, у нита с PFR 12-15 он всегда выше, чем у ТАГа с PFR 20-25. Первый изначально подходит к флопу с топ-спектром, который чаще остается достаточно сильным, чтобы проследовать до шоудауна.
WWSF означает «как часто покерист выигрывает деньги в раздачах, в которых видел флоп».
Данный стат зависит от префлоп-диапазона, умения анализировать структуру борда и подстраиваться под соперников. У большинства игроков он находится в районе от 44% до 53%.
WWSF в отчете Holdem Manager
Как правило, чем больше значение, тем сильнее соперник на постфлопе. Если число выше 48%, он хорошо реализует эквити вэлью-диапазон и эффективно совершает блефы. Показатель от 43% до 47% у регуляра обычно означает, что он полагается на готовые комбинации и реже побеждает без шоудауна.
На микролимитах можно добиваться 50%+ за счет прямолинейной стратегии. Здесь много слабых оппонентов, совершающих дорогие ошибки. Но чем выше игровой лимит, тем жестче сопротивление. Поэтому нужно учиться зарабатывать не только на шоудауне, то есть эффективно блефовать и полублефовать.
Что такое WonSD, и как он используется в игре
Правильная интерпретация WonSD в покере — это возможность представить, как часто рука оппонента на вскрытии оказывается выигрышной и подстроиться соответствующим образом.
WonSD = победы на вскрытии / общее количество шоудаунов * 100%.
Аббревиатура переводится как Won Money on Showdown. В трекерах стат также может обозначаться как W$SD% или Won$SD%.
Средние значения WonSD для низких лимитов
Практически все игроки имеют процент побед на шоудауне от 45% до 57%. Добиться меньшего значения можно только умышленно. А держать стат выше 57% на длинной дистанции нереально. Даже некомпетентные оппоненты-любители не будут настолько часто показывать слабые комбинации.
W$SD в отчете покерного трекера
Чем выше WTSD, тем ниже WonSD, потому что с широким диапазоном сложнее оставаться впереди на последней улице. Поэтому наблюдается закономерность:
Тот, кто заводит на постфлоп много рук, реже выигрывает на шоудауне. В статистике это отображается, например, в виде связки WTSD%/W$SD 25%/55%.
Тот, у кого узкий спектр на постфлопе, чаще доводит свои сильные карты до вскрытия и старается с ними собрать банк покрупнее. Его связка близка к 28%/47%.
Чтобы принять правильное решение, нужно учесть и другие статистические показатели постфлопа. Например, высокий W$WSF при скромном WTSD% говорит, что игрок действует агрессивно и выдавливает соперников, забирая банки без шоудауна.
Как дисперсия может влиять на WonSD
Дисперсия сказывается на любых статистических показателях. Поэтому делать выводы о противнике следует при наличии крупной базы рук. Теоретически возможно попадание в «белую» полосу, когда на дистанции в несколько тысяч раздач средний участник показывает W$SD выше 55% при WTSD 26-28%. Но эта аномалия постепенно устранится за счет попадания в обратный виток дисперсии, когда будет трудно победить на вскрытии, даже редко до него доходя.
Как будет меняться стратегия игрока в зависимости от WonSD оппонента
Анализируя статистику противника на шоудауне, необходимо отталкиваться от основного принципа:
Низкий W$SD — часто показывает на вскрытии слабые руки.
Высокий W$SD — обычно имеет на шоудауне сильные комбинации.
Далее следует соотнести эти данные с другой информацией по его стратегии на постфлопе. Например, низкий WTSD и высокий WonSD — это излишне осторожный соперник. Он часто расстается со средними руками на флопе и терне. Поэтому ничего (за исключением сильных комбинаций) у него на вскрытии быть не может. Чтобы эксплуатировать такого соперника, достаточно просто не проплачивать его натсы и выдавливать средние руки до ривера.
Статистика сильного оппонента: высокий проход до шоудауна без провалов по выигрышам
А если у соперника высокий WTSD и низкий WonSD, то он:
Часто коллирует ривер со слабыми руками, пытаясь поймать блеф.
Переоценивает средние комбинации.
Делает много коллов с пограничными картами.
Недобирает на ривере, часто чекая там, где можно тонко добрать или совершить блеф.
Пассивно разыгрывает дро, не выбивая соперников из банка.
Такого оппонента следует эксплуатировать, просто реализуя эквити сильных готовых рук.
Использование статистики в покере
Стратегия на раздачу должна включать несколько вариантов розыгрыша, каждый из которых корректируется в соответствии со статистикой соперников. Вовремя замеченная особенность оппонента позволяет увеличить вероятность успеха при блефе или подобрать приемлемый для колла размер ставки:
Тип
Лузово-пассивный
Тайтово-пассивный
Маньяк
Регуляр с ликом
Регуляр с ликом
WTSD%
> 30%
> 28%
W$WSF
> 46%
WonSD%
Тенденции
Крупный разрыв между VPIP и PFR.
Часто тянет слабые и средние комбинации.
Даже не со всеми сильными руками готов повышать.
Крупный разрыв.
Легко сдается с руками средней силы.
С мощными готовыми комбинациями действует агрессивно.
Высокие PFR и VPIP.
Много ставит и блефует, зачастую не обращая внимания на рисунок борда.
Часто ловит блефы.
Пассивно разыгрывает дро.
Делает лишние коллы со средними руками.
Излишняя агрессия.
Переигрывание пограничных рук.
Лишние ставки на ривере с недостаточным эквити
Ориентировочная связь статистики со слабостями в стратегии
Определение слабых игроков на основе статистики
Каждая ситуация уникальна, поэтому гарантированно рабочих советов не существует. Однако характерные значения статов отображают постфлоп-тенденции оппонентов:
Автоответчики любят из любопытства посмотреть на карты оппонентов, поэтому отличаются высоким WTSD%. При этом W$SD у них редко бывает выше 48%.
Маньяки тоже не любят рано сдаваться, но действуют агрессивно. Их W$SD, как правило, еще ниже, чем у автоответчиков. Дело в том, что они сами выбивают слабые руки соперников и оставляют себя против мощного диапазона.
Нитовые регуляры используют тактику fit or fold. Они легко фолдят, если не попадают на флопе в пару или дро. Поэтому их проход до шоудауна невысок, а W$SD, в свою очередь, внушителен.
Поначалу сложно быстро представить, как постфлоп-тенденции того или иного соперника позволяют предугадать его действия. Но этому можно научиться. Необходимо анализировать историю рук из покерного трекера. Большие выборки доказывают, что есть несколько характерных стилей, приверженцы которых одинаково действуют в схожих ситуациях. А еще разбор базы помогает найти эксплуатируемые слабости в стратегии регуляров.
Часто задаваемые вопросы
Каковы показатели агрессии у среднего оппонента на низких лимитах?
На флопе — от 44% до 50%, на терне — от 25% до 36%, на ривере — от 21% до 27%.
Какие статы постфлопа нужно добавлять в HUD?
Желательно не усложнять интерфейс игрового стола слишком большим количеством чисел. Постфлоп-показатели можно быстро посмотреть через попап, привязанный к стату агрессии или продолженной ставке.
Что делать, если статы не соответствуют средним значениям?
Если удается выигрывать с такой стратегией на длинной дистанции — ничего. Когда нет — анализировать историю и изучать раздачи, в которых совершаются дорогие ошибки. После их устранения статистика изменится сама.
Отражаются ли статы на графике результатов?
Напрямую нет. Но стиль постфлопа влияет на структуру профита. W$SD связан с выигрышами на шоудауне, это синяя линия. Красная — банки, забранные без ШД. Разница между ними — чистая прибыль покериста.
Какие статы у лучших игроков мира?
Зависит от стиля, формата игры и подбора соперников. Например, у LLinusLove WTSD 31, WonSD 51, WWSF 49.
Расписание — The Legends
7 дней в неделю / 24 часа в сутки
Национальные новости, местные новости и местная погода Верх и конец часа — Актуальные местные новости с 6 утра 9:00 – Национальные новости ABC Дважды в час – Актуальная местная погода Дважды в час
Субботняя линейка
«Chamber Talk» с Риком Стэнли Суббота: 90:00 – 18:00Послушайте, как президент Торговой палаты Сэнфорда/Спрингвейла разговаривает с местными общественными деятелями и представителями бизнеса. Прослушайте это шоу еще раз
Senior Power По субботам: с 8:00 до 8:30 Senior Power of Maine — это радиопрограмма, которую ведут Дэвид Нилли, бывший издатель журнала MAINE SENIORS Magazine, и его остроумная соведущая Линн МакГрегор. Senior Power of Maine — это ток-шоу с интервью на познавательные темы, с другими интересными и развлекательными сегментами. Только для взрослой аудитории. Послушайте это шоу еще раз
The Doo-Wop Show с капитаном Карлом Кэшем Суббота: 19:00–21:00 Все эти замечательные уличные гармонии 50-х и 60-х годов для вашего удовольствия от прослушивания и танцев. Это Ду-Воп сделано правильно!
ДИК БАРТЛИ ПРЕДСТАВЛЯЕТ ЛУЧШИЕ ХИТЫ РОК-Н-РОЛЛА: ШОУ 60-Х По субботам: с 21:00 до 12:00 Hickley Barits и Classic Barits 9 90. Его теплое, мягкое и дружелюбное звучание, а также его знание хитов — идеальное сочетание для исполнения того, что любят слушатели… потрясающего многочасового тура по одной из величайших музыкальных композиций всех времен.
Sunday’s Line Up
Французский час с Роджером Воскресенье: 7:30–9:00 Roger Hurtubise играет замечательную французскую музыку для сообщества French-Cdian! Послушайте это шоу еще раз
The Real Estate Buzz With Peggy Hill Воскресенье: 9:00–9:30 Покупка, продажа или просто размышления об этом? Не пропустите отличный совет от Пегги и ее гостей. Недвижимость, ипотека и полезные советы по покупке и владению жильем. Прослушайте это шоу еще раз
Bill O’Neil’s Forgotten 45’s Воскресенье: 19:00–21:00 Билл получил свои первые 45 пластинок на Рождество в 1961 году и до сих пор собирает их. Билл, уроженец Портленда, окончил школу Чеверус Хай и Фэрфилдский университет. С 1972 года по сегодняшний день Билла можно услышать, играя старые песни и 40 лучших пластинок на радио Южного Мэна. Прослушайте это шоу еще раз
Boston Country Oldies. В 1994 году их судьба была решена, когда они были привлечены к участию в еженедельном шоу старины в стиле кантри, которое более 20 лет транслировалось по бостонскому радио.
Конференция
«Весь мир — один цветок» — Школа дзен Кван Ум
Две тысячи пятьсот лет назад на Пике Стервятника в Индии Будда поднял цветок лотоса и продемонстрировал вселенскую истину. В конце Второй мировой войны дзен-мастер Ман Гонг взял лепесток с листа корейского национального цветка, окунул его в чернила и написал грубой каллиграфией, которая гласила: «Весь мир — это один цветок».
Это означает равенство, гармонию и мир. Это значит, что мы с вами, солнце и луна, земля и небо, воздух и вода принципиально не разделены и не различны. У каждого из нас один и тот же корень.
Дзен Мастер Ман Гонг очень надеялся, что все люди вернутся к этому общему корню, нашей изначальной субстанции, и из корня снова может появиться единый прекрасный мировой цветок равенства, гармонии и мира.
Дзен-мастер Сын Сан основал конференцию «Весь мир — один цветок» (WWSF), чтобы объединить людей из разных стран и традиций в духе единства и гармонии.
Сохраните даты:
Конференция «Весь мир — один цветок»
8–18 октября 2023 г.
Место: Храм Мусангса, Южная Корея
Тема: Традиции дзэн в постоянно меняющемся мире Аэропорт Инчхон для всех участников
18 октября: Конец конференции.
19 октября: участники могут отправиться в Гонконг на мероприятие, посвященное 30-летию монастыря Су Бонг (21–23 октября 2023 г.), продлить пребывание в Корее или запланировать поездку домой.
История конференции WWSF
1987
Первая конференция WWSF была проведена в Корее в 1987 году, в связи с 60-летием Дзен Мастера Сунг Сана. Конференция проходила частично в отеле Lotte в Сеуле, а также в храме Су Деок Са, главном храме нашей монашеской семьи. Конференция прошла успешно, открыв путь в светлое будущее этого мероприятия. Вторая конференция также была проведена в Корее тремя годами позже, в 1990 году. Эта конференция также включала речи о дхарме и совместную практику в храмах Хва Ге Са и Су Деок Са.
1993
Третья конференция была проведена в 1993 году, половина в Корее, а половина в Гонконге и Китае в храме Шестого Патриарха Нам Хва Са. В этой конференции участвовало много людей, в том числе китайские монахи из храма Нам Хва Са. Дзен-мастер Сунг Сан произнес речь о дхарме, и в храме была проведена церемония обетов, во время которой несколько наших монахов получили монашеские обеты.
1996
Следующая конференция прошла в Гонконге и Китае в 1996. Темой конференции было «Стань единым целым, помоги всем существам», что правительство Китая сочло более подходящим, чем первоначальный лозунг «Просто сделай это!» Присутствовали дзен-мастер Сын Сан, а также его лучший друг, великий мастер Бёк Ам Суним, камбоджийский патриарх Маха Госананда и многие другие люди со всего мира.
1999
В 1999 году конференция проводилась в Дзен-центре Провиденс в Камберленде, Род-Айленд. Помимо трехдневной конференции, участники смогли посетить Бостон, Кембриджский дзен-центр, международный дзен-центр Чогье в Нью-Йорке, а люди издалека съездили на Ниагарский водопад. Группа также посетила историческую Плимут-Рок, которую дзен-мастер Сын Сан назвал «основной точкой Соединенных Штатов». Конференцию посетило много людей из Кореи, в том числе организация мирян из Хва Ге Са.
2002
Конференция в 2002 году проходила в Му Санг Са, на горе Ге Рён Сан в Корее. Помимо самой конференции, участники посетили важные корейские храмы.
2005
В 2005 году конференция проходила в Сингапуре. Присутствовало много людей из Сингапура и Малайзии, а также из более отдаленных стран, таких как Корея и Соединенные Штаты. Конференция включала в себя поездку в новый ретритный центр в Малайзии.
2008
Конференция проходила в Варшаве, Польша, в 2008 году. Конференционный тур включал поездки в Варшаву, Краков, Освенцим, Прагу и Будапешт. На эту конференцию приехало много людей из-за рубежа, вместе со многими корейцами из семей Му Сан Са и Хва Ге Са.
2011
Участники WWSF 2011 отправились в тур по штатам Уттар-Прадеш и Бихар, Индия, следуя по стопам Будды Шакьямуни, начав в священном городе Варанаси с утренней прогулки на лодке по реке Ганг. Участники посетили Сарнатх, где Будда произнес свою первую проповедь, Бодхгая и храм Махабодхи, а также посидели под деревом Бодхи. Они посетили Пик Стервятника, где Будда держал цветок, Кушинагар, где Будда достиг Махапаранирваны после своей смерти, и, наконец, Лумбини, Непал, место рождения Будды, где многие мастера дзен и почетные гости давали замечательные беседы о дхарме. Фото и видео с конференции можно найти здесь: группа WWSF в Facebook.
2014
В 2014 году в Южной Корее состоялась конференция WWSF, организованная Мусангса, главным храмом KUSZ в Азии. 10-дневная поездка включала двухдневную конференцию на темы дзен и текущей ситуации в мире, актуальности духовности в профессиональной жизни и воспитании молодежи в современном обществе. В мероприятии приняли участие более 200 участников из 17 стран и многие другие из Кореи. После конференции группа отправилась в Мусангсу, где состоялась 10-я церемония памяти дзен-мастера Сунг Сана. Затем последовало паломничество в различные храмы в Унмунсе, Боэмосе и Пэкдамсе, где проходят обучение многие из наших иностранных монахов и монахинь.
Під замовленняАвтоматична система розкладання KT-L 20s на 20 пробірок 250/300 мл, нагрівання до 430°С ± 0.5 °З
Ціну уточнюйте
+380 (67) 441-35-76
Київстар
+380 (63) 488-81-32
Life
+380 (66) 441-35-76
Vodafone
+380 (67) 433-11-80
Київстар
+380 (44) 227-75-13
Міський
Під замовлення
Код: KT-L 20s Gerhardt
Відправка з 12 лютого 2023
повернення товару протягом 14 днів за домовленістю
Опис
Характеристики
Інформація для замовлення
Автоматична система розкладання KT-L у пробірках за методом К’єльдаля з ліфтом, серія Kjeldatherm, Gerhardt
Автоматичний дигестор KT-L призначений для визначення білка за методом Къельдаля в зразках з вмістом азоту в мікро і макро діапазонах. Прилад оснащений ліфтом для підйому і опускання повністю завантаженого вставного штатива і блоку уловлювання парів. Температура нагріву: 430°С. Об’єм пробірок: 100, 250 або 400 мл Кількість місць: 8-, 20 — або 40 — місцеві системи.
Зручні функції систем KT-L
Безпечний автоматичний підйом і опускання повністю завантаженого вставного штатива і блоку уловлювання парів
Функція попереднього нагрівання і утримання температури між проведенням розкладань, встановлюється оператором
99 програм з 40 різними кроками нагріву, з програмованими часом і потужністю нагріву
Розмежування прав користувачів
Світлодіодне підсвічування пробірок
Кольоровий дисплей 3,5″ (діагональ ≈ 9 см)
USB інтерфейс
Авто управління скрубером TURBOSOG і клапаном охолоджуючої води
Захист від перегріву
Піддон з легкоочищаемого матеріалу.
Токарный станок с наклонной станиной KTL 60/1000 (NL504SC) — цена, отзывы, характеристики с фото, инструкция, видео
Токарный станок KTL 60/1000 (NL504SC) с ЧПУ предназначен для высокоскоростной токарной обработки наружных и внутренних поверхностей деталей типа тел вращения со ступенчатым и криволинейным профилем, различной сложности, включая нарезания резьбы, сверление, зенкерование.
Высокоточные токарные обрабатывающие центры серии KТL применяются во всех отраслях машиностроительной индустрии, а также в авиационно-космической и военной промышленности, приборостроении.
Получаемые изделия
Схемы обработки
Особенности станков KTL60
Направляющие осей X, Z и задней бабки имеют цельную жесткую конструкцию. Ширина верхней направляющей оси Z составляет 80 мм, ширина нижней направляющей – 70 мм, ширина направляющей оси X – 50 мм. Твердость направляющих составляет от 49 — 52 HRC. Шарико-винтовые пары осей X и Z со сдвоенными гайками имеют класс C3. Диаметр и шаг шарико-винтовых пар осей X и Z оставляют 32×10 мм и 40×10 мм соответственно. Данные технические параметры позволяют применять тяжелые режимы резания, работать на «удар». Деформации и вибрации в системе «СПИД» станка имеют минимальные значения.
Станина, корпуса шпиндельного узла, задней бабки и суппорта после литья на заводе проходят несколько этапов старения перед окончательной механообработкой.
Достоверно известно, что тепловые деформации составляют существенную долю в общем балансе погрешностей при изготовлении деталей. Погрешности вызванные тепловыми деформациями составляют до 30-70% от общей погрешности обработки. Особенно заметно их влияние при выполнении чистовых операций.
При разработке конструкции станка, в частности шпиндельной бабки, конструкторами завода учтено воздействие тепловых деформаций, распределение механических напряжений при помощи систем математического моделирования, что позволило добиться внушительных результатов по точности изготовления и сборки шпиндельных узлов.
Осевое отклонение на длине 20 / 300 мм — 0,01 / 0,022 мм
Радиальное биение фланца шпинделя — 0,008 мм
Торцевое биение фланца шпинделя — 0,008 мм
Конструктивные особенности
Шпиндель собственной разработки
Высокоскоростная шпиндельная бабка разработана с учетом минимальных тепловых деформаций и высокой точностью обработки. В шпинделе установлены высокоточные подшипники компании NSK (Япония).
Цельнолитая наклонная станина высокой жесткости
На данной серии станков используется цельная станина с углом наклона 45°, изготовленная из модифицированного чугуна – механита с внутренними ребрами жесткости. Такая конструкция станины обеспечивает лучшую устойчивость, жесткость, гашение вибраций. Так же наклонная станина занимает меньшую площадь, что позволяет легко удалять стружку и эксплуатировать станок.
Направляющие скольжения
После термообработки твердость поверхности направляющих составляет от 49 — 52 HRC. Преимущества подобной системы в простоте и компактном устройстве, такие направляющие обладают большой нагрузочной возможностью, жёсткостью, способностью демпфировать вибрации. В станке установлены все передачи ШВП производства HIWIN (Тайвань).
Преимущества
Цельнолитая станина, угол наклона 45˚ с повышенной виброустойчивостью и жесткостью.
Направляющие скольжения с большой нагрузочной способностью.
Усиленный шпиндель для силовой обработки.
Конструкция станка спроектирована с учетом уникальной системы математического моделирования ANSYS.
Характеристика
Значение
Параметры обработки
Диаметр патрона, дюйм
10″
Макс. диаметр устанавливаемого изделия над станиной, мм
600
Макс. диаметр устанавливаемого изделия над суппортом, мм
450
Макс. диаметр обработки, мм
500
Макс. длина обработки, мм
1000
Макс. диаметр прутка, мм
51
Оси X и Z
Перемещение по оси X, мм
295
Перемещение по оси Z, мм
1100
Ускоренные перемещения по осям X/ Z, м/мин
12/6
Диаметр/шаг винта оси X, мм
32/8
Диаметр/шаг винта оси Z, мм
40/10
Крутящий момент серводвигателя X/Z, Нм
10,5 / 10,5
Шпиндель
Торец шпинделя, ISO
А2 — 6
Диаметр отверстия шпинделя, мм
65
Максимальная скорость вращения, мин-1
3000
Высота оси шпинделя от пола, мм
1000
Мощность электродвигателя главного привода (пост. /30 мин.), кВт
11 / 15
Инструментальная система
Количество инструмента, шт
8 (опция 10/ 12)
Размер сечения державки резца, мм
25 x 25
Размер сечения державки расточного резца, мм
40
Гидравлическая задняя бабка
Диаметр пиноли, мм
100
Ход пиноли, мм
100
Размер конуса, Морзе
5
Точность
Точность позиционирования по осям X / Z, мм
0,012 / 0,016
Повторяемость по осям X / Z, мм
0,006 / 0,008
Энергопотребление
Напряжение, В
380 ± 5%
Частота, Гц
50
Полная мощность, кВА
25
Габаритные размеры
ДхШхВ, мм
4750x1880x1950
Вес KTL 60/1000 (NL504SC) , кг
4800
Стандартная комплектация
Система ЧПУ FANUC (Япония)
Промышленная система ЧПУ самая распространённая в России, более проста в использовании, легко найти операторов. Сервис по всей России, запасные части в наличии на складах. Для удобства оператора стойка снабжена маховиком ручного управления.
Револьверная головка
В стандартной конфигурации станок оснащен гидравлической револьверной головкой Тайваньского производства на 8 инструментов (10/12 опция), обладающей повешенной жесткостью, надежным захватом, высокой скоростью индексации и высокой повторяемостью позиционирования.
Гидравлическая задняя бабка
В стандартной конфигурации станок оснащен гидравлической задней бабкой. Выдвижение пиноли задней бабкой управляется гидравлической системой.
Гидравлический 3-х кулачковый патрон
В стандартной конфигурации станок оснащен гидравлической задней бабкой. Выдвижение пиноли задней бабкой управляется гидравлической системой.
Педаль зажима/разжима патрона/пиноли задней бабки
Предназначена для зажима/разжима гидравлического патрона и пиноли задней бабки.
Транспортер для удаления стружки
Предназначен для автоматизации сбора стружки из черных и цветных металлов в процессе работы станка.
Система автоматической смазки
Система автоматической смазки станка обеспечивает периодическую подачу смазочного материала.
Бесступенчатое регулирование скорости вращения шпинделя.
12 позиционная револьверная головка позволит расширить технологические возможности вашего производства, увеличить номенклатуру обрабатываемых изделий, позволит производить обработку конструктивно более сложных деталей за одну установку.
Задняя бабка управляемая по оси Z от ЧПУ
Опционально возможно оснащение задней бабки серво-двигателем для перемещения по оси Z.
Редукторный привод
У серии станков Z шпиндельная бабка оснащается редукторным приводом. Привод шпинделя осуществляется посредством редуктора для обеспечения высокого момента на низких оборотах, что позволяет обрабатывать особо тяжёлые заготовки и точить с максимальными припусками закаленные и легированные материалы.
Система измерения инструмента
Привязка инструмента производится не по детали — «по первой стружке», что является непомерно большой потерей времени в общем цикле изготовления детали (привязка, измерение, корректировка), а при помощи специальной системы измерения смонтированной на корпус станка. Сердцем такой системы является комплект датчиков и щупа, которые обеспечивают измерения, а также комплект программного обеспечения, который обеспечивает интеграцию с системой ЧПУ и предлагает ряд разнообразных возможностей.
Люнеты
Технологические возможности оборудования могут быть расширены за счет применения люнетов. Основное назначение данного приспособления — поддержка длинных заготовок (длина которых превышает в 10 -12 раз диаметр) и создание условий для надежной обработки, исключающей образование вибрации.
Устройство подачи прутка
прост и надёжен в работе
программируемый расход материала
возможность программирования реверс
индикация ошибок (при недостаточном количестве материала или при передвижении сигнализируется на ЖК-мониторе)
быстрая смена диаметра заготовки
возможность использования 6-тигранных заготовок
быстрая смена заготовок
экономия материала
Комментарии и вопросы:
Комментариев пока нет, но ваш может быть первым.
Разметить комментарий или вопрос
Отзывы о KTL 60/1000 (NL504SC):
Отзывов пока нет, но ваш может быть первым.
Оставить отзыв
Решения Microsoft для любой отрасли
Предоставление облачных и локальных технологий для вашей организации
Microsoft Office 365
Учить больше
Майкрософт Динамика 365
Учить больше
Microsoft Azure
Учить больше
Microsoft Силовая платформа
Учить больше
КТЛ 360 Управляемые услуги
Учить больше
Предоставление облачных и локальных технологий для вашей организации
Microsoft Office 365
Microsoft для государственных учреждений
Предоставление облачных и локальных технологий для вашей организации
Microsoft Dynamics 365 — ERP
Microsoft Dynamics 365 — CRM
Microsoft for Government
Предоставление облачных и локальных технологий для вашей организации
Microsoft Azure
Microsoft для государственных учреждений
Предоставление облачных и локальных технологий для вашей организации
Microsoft Power Platform
Microsoft для государственных учреждений
Предоставление облачных и локальных технологий для вашей организации
KTL 360 Управляемые услуги
KTL 360 Коммерческие услуги
KTL 360 Государственные услуги
Предоставление облачных и локальных технологий для вашей организации
Посмотреть платформы
Представьте, что вы смотрите за пределы срочного
Правильная технология может процветать даже в неожиданном.
Ни один бизнес не может быть устойчивым на 100 %, но те, кто укреплен технологиями, могут использовать любой поворот как возможность переосмыслить и переопределить. Вам просто нужен правильный технологический партнер, который поможет вам справиться с этими проблемами.
Ожидайте лучшего от партнера Microsoft по внедрению
Эффективность, действенность
решение проблем
Все, что влияет на повседневную деятельность, имеет далеко идущие последствия для ваших долгосрочных планов технической зрелости. Мы исправим это быстро, чтобы вы могли сосредоточиться на более широкой картине.
Креативные долгосрочные
решения
Когда вы не паникуете, пытаясь потушить пожар, вы можете сосредоточиться на формировании того, что возможно. Наши консультационные услуги предназначены для обработки деталей, чтобы вы думали о долгосрочной перспективе и сосредоточились на творческих решениях для своего бизнеса.
Общий успех
подход
Мы не рассматриваем обязательства как односторонние отношения; каждый проект, за который мы беремся, становится настоящим партнерством, в котором добиваются успеха обе стороны. Работа с KTL Solutions означает, что наш успех полностью зависит от вашего.
Наш процесс
Мы поможем вам применить правильные технологии для улучшения ваших финансовых процессов, обслуживания клиентов и операционных процессов, чтобы вы могли беспокоиться о самой важной задаче — росте.
Проконсультируйтесь по телефону
Давайте поговорим о том, что действительно мешает вам вести бизнес. Мы оценим ваше видение проекта, чтобы создать цели и ключевые показатели эффективности, прежде чем выделять ресурсы и планировать результаты.
Конфигурация
Мы настраиваем программное обеспечение для ваших бизнес-процессов, собирая все необходимые требования по каждому направлению бизнеса.
Test & Train
Когда дело доходит до ваших бизнес-операций, второстепенных решений не бывает. Мы тщательно тестируем и гарантируем, что все чувствуют себя уверенно перед запуском.
Выход в эфир
Мы поддержим вас во время запуска и любых проблем, с которыми вы можете столкнуться во время работы.
Готовы превратить прерывания
в вдохновение?
При наличии правильной технологии и поддержки вы можете построить масштабируемую бизнес-модель.
О компании | Команда лидеров
Внедряйте технологии и создавайте цифровые возможности.
Технологические группы находятся под сильным давлением необходимости создавать современные платформы. Вы измеряетесь своей способностью оценивать новые технологии, внедрять приложения, которые лучше всего подходят для вашего бизнеса, а затем поддерживать и масштабировать их с течением времени. Вам нужно одновременно мыслить масштабно и двигаться быстро. И все это приходится делать с меньшими внутренними ресурсами.
В мире гиперскорости вам нужно доверять своим деловым партнерам
В KTL мы стремимся создавать решения, которые позволят вам развивать свой бизнес и цифровые возможности. Именно поэтому мы начали помогать таким компаниям, как ваша, с первой версией Microsoft Dynamics в 1999 году. Именно поэтому сегодня мы продолжаем помогать предприятиям в каждой отрасли — от малых и средних предприятий до корпоративных клиентов — получать больше от своих цифровых проектов.
Отличие решений KTL
Преданность
Мы понимаем, как важно оставаться в курсе постоянно меняющихся технологий во всех областях. Мы инвестируем в непрерывное образование и обучение не только внутри компании КТЛ, консультантов, разработчиков и представителей по работе с клиентами, но и за ее пределами, предлагая образовательное обучение нашим клиентам.
Опыт
Наша команда, состоящая из профессионалов из разных областей и отраслей, способна помочь вашей компании наилучшим образом использовать ваши технологии. Независимо от того, разрабатываем ли мы индивидуальные дополнения или отдельные продукты или внедряем процессы, которые помогут вам стать более эффективными, у нас есть опыт, чтобы сделать все правильно. KTL Solutions является сертифицированным партнером Microsoft Gold в нескольких областях и авторизованным CMMC-RPO.
Согласованность
Определенные нами методы внедрения бизнес-решений согласуются в подходе к каждому проекту внедрения и разработки программного обеспечения. Это гарантирует, что индивидуальный проект будет выполнен вовремя, в рамках бюджета и соответствует ожиданиям клиента.
Группа руководителей KTL Solutions
Тимоти (Тим) Лалли-старший
Генеральный директор/основатель
Обладая проверенной репутацией и более чем 20-летним опытом управления продажами, консультирования и развития…
Читать далее
Тим Лалли-старший является основателем и генеральным директором KTL Solutions, консалтинговой фирмы полного цикла. В качестве генерального директора Тим отвечает за управление всеми аспектами бизнеса, включая, помимо прочего, наставничество новых разработчиков, обучение принципам и процессам бухгалтерского учета, а также руководство разработкой и проектированием индивидуальных решений. Тим также работает напрямую с клиентами, укрепляя прочные отношения, анализируя бизнес-процессы и предлагая эффективные решения для повышения производительности. Он дает рекомендации высокого уровня клиентам KTL, чтобы помочь им лучше использовать технологии в своей организации.
Имея подтвержденный послужной список руководителей и более чем 20-летний опыт управления продажами, консультирования и развития в технологической отрасли, Тим имеет особый опыт в области внедрения и разработки программного обеспечения Microsoft Business Solutions. Тим начал внедрять MAC GP в 1987 году и работает в Microsoft Dynamics GP с 1994 года. Тим является бездействующим сертифицированным бухгалтером со степенью бакалавра бухгалтерского учета Университета Мэриленда.
Кимберли (Ким) Лалли
HR/вице-президент по финансам
Ким работает в KTL с момента ее основания в 1999 году. часть КТЛ с момента ее основания в 1999 году. Она выполняет несколько функций, поскольку отвечает за финансовый, административный и кадровый отделы. Она отвечает за поддержание привлекательной рабочей среды и обеспечение высокого уровня обслуживания клиентов. Ее основная обязанность заключается в работе с поставщиками и клиентами по системным заказам и проблемам, а также в реализации процессов, влияющих на поддержку и общение с нашими клиентами. В свободное время Кимберли реализует мероприятия для команды КТЛ. Кимберли так же активна со своей личной семьей, как и со своей рабочей семьей.
Эндрю Лалли
Вице-президент по разработке программного обеспечения и технологиям
Эндрю окончил Колледж Парк Университета Мэриленда со степенью в области компьютерных наук…
Подробнее
Эндрю окончил Колледж Университета Мэриленда Парк со степенью в области компьютерных наук. Он также является сертифицированным специалистом Microsoft с несколькими учетными данными Microsoft, включая веб-приложения, App Builder, Azure Administrator и другие.
Барри Кроуэлл, MBA
Вице-президент по консультационным услугам
Барри имеет более чем 20-летний опыт работы в сфере бухгалтерского учета и Microsoft Dynamics GP… хорошее знание стека Microsoft BI (SSIS, SSRS, SSAS и Power BI). Он проектировал, разрабатывал и развертывал бизнес-аналитику клиентов, используя стек бизнес-аналитики Microsoft и/или Solver BI360. Его решения включают инструменты SSIS ETL, отчеты и информационные панели SSRS, информационные панели Excel, отчеты и информационные панели Power BI, а также кубы SSAS. Он выполнял внедрение в качестве ведущего консультанта и/или менеджера проекта конечного пользователя. Барри имеет более чем 20-летний опыт работы в сфере бухгалтерского учета и Microsoft Dynamics GP, а также в различных отраслях, таких как жилищные органы, университеты, правительства племен и казино. Он имеет степень бакалавра бухгалтерского учета и делового администрирования Государственного университета Блэк-Хиллз и степень магистра делового администрирования Университета Ла Саль. Опыт Барри как в области ИТ-консультанта, так и в качестве бухгалтера дает ему возможность понимать проблемы как с точки зрения ИТ, так и с точки зрения финансов, и предлагать решение, которое соответствует потребностям всех вовлеченных сторон.
Стив Рид
Вице-президент по продажам и маркетингу
Будучи неизменно лучшим менеджером по продажам, Стив построил успешную карьеру благодаря своей способности оценивать… — исполнительный директор по продажам, Стив построил успешную карьеру благодаря своей способности оценивать и предвидеть потребности клиентов, определять уникальные альтернативы, а также разрабатывать и внедрять долгосрочные решения. За более чем 25 лет лидерства в области стратегических продаж и маркетинга в сегменте B2B искреннее стремление Стива к постоянному обслуживанию клиентов и их удовлетворенности позволило ему построить отношения, которые переросли в прочные и устойчивые партнерские отношения.
Стив окончил Университет Кентукки по специальности бухгалтерский учет и финансы. Его уникальное сочетание основных навыков управления бизнесом позволяет ему достигать консенсуса и инициировать новые программы и процессы, расширяющие возможности высокоэффективных команд.
Практика применения: 3D-принтер помогает проектировать дома
О том, что технологии объемной печати достигли уже такого уровня, что при их помощи уже успешно строят дома (в том числе многоэтажные) мы уже писали. Однако на фоне прогресс не следует забывать и о том, что строительство всякого дома и в принципе любой серьезной конструкции, начинается с проектирования и тут 3d-печать уже в принципе не имеет себе равных, став незаменимым инструментом в работе наиболее успешных архитекторов, инженеров и конструкторов.
Очередным примером данному явлению стал материал, опубликованный пользователем под псевдонимом amforma на страницах портала 3dToday.ru. Представляем вашему вниманию данную статью. Орфография и пунктуация автора сохранены. Также следует отметить, что по словам автора данного кейса он относится к технологии RepRap.
Думаю, каждый архитектор в своей работе сталкивается с людьми, не имеющими достаточного образного или пространственного мышления. Когда проектируешь очередной дом, беседку, летнюю кухню или баню, стандартно приходится разрабатывать кроме 2D модели в AutoCAD или ArchiCAD ее 3D модель, с последующей визуализацией.
Визуализация – сильная вещь, но даже она не так осязаема и понимаема человеком неподготовленным, как физический макетик будущего здания-сооружения.
– начинает свой рассказ автор.
В макетах мы можем считать себя профессионалами, и знаем огромное количество способов воссоздать копию объема в миниатюре. Но чаще всего это кропотливая, вдумчивая работа, требующая создания «проекта» самого макета, а не только проекта того или иного здания. Плюсом хороший макет всегда имеет внушительный бюджет, и поэтому заказчики малого строительства, например коттеджа, не видят в нем никакого смысла.
Программа ArchiCad, специально заточена для работы с объектами будущего строительства и моделировать их в ней проще, чем где бы то ни было. Так же она позволяет за секунду выделить все невесомые объекты, не пригодные для печати, например стеклопакеты и заменить пустыми проемами. Вуаля – модель для 3d печати готова. Достаточно залечить, например в netfabb.
В своей практике, на очередном объекте, обзаведясь 3D принтером, мы решили провести эксперимент над заказчиком – распечатали ему 3D модель его будущего дома в М 1:100, таким простым способом. Эффект оказался потрясающим и непредсказуемо успешным даже для нас самих. Себестоимость макета оказалась минимальной, затраты времени на «проект» макета – минимальные. Реакция заказчика – максимально положительная. Все последующие переговоры велись непосредственно на макете, а не чертежах.
– продолжает повествование разработчик и демонстрирует фотографии.
Крыша здания снимается, видны ее конструктивные особенности и уклоны. Под съемной крышкой – понятная , с проемами и окнами, планировка второго этажа, над которой можно объективно раздумывать по цветовой гамме, расстановке мебели и фактическому расположению покрытий в комнатах.
Снимая второй этаж – так же видим объективно всю планировку первого этажа с его окнами, дверями, крыльцами и функциональными помещениями.
При желании можно распечатать мебель, бытовую технику, камины, приложить к этому человечков в масштабе.
Как итог – получился яркий, необычный инструмент осязаемой визуализации и крутейший способ донесения архитектурной концепции заказчику, с которым в последствии прекрасно играют его дети!
– подводит итоги энтузиаст применения 3д-печати в области проектирования жилых домов..
Нам принтер строить и жить помогает!
– перефразировав знаменитую песню, комментирует данный пост один из пользователей 3D Today. Не можем не согласиться.
Заметили ошибку? Выделите ее и нажмите Ctrl+Enter
Твитнуть
3D-принтер нового поколения для микродеталей с высоким разрешением
Новейший метод 3D-печати позволяет получать микродетали с чрезвычайно гладкими поверхностями без необходимости дополнительной обработки, экономя время и деньги при промышленном прототипировании.
Компания Microlight3D, производитель, специализирующийся на 3D-принтерах для микропечати со сверхвысоким разрешением для промышленного и научного применения, объявила о выпуске Altraspin™, компактного новейшего 3D-принтера для производства крайне сложных микродеталей с субмикронным разрешением.
Принтер Altraspin печатает микродетали с разрешением в 100 раз меньше пряди волос для областей применения, требующих высочайшей точности и качественной отделки поверхностей. Для этого используется микрооптика, микродатчики и печатные профили, помещаемые внутрь микроструйных устройств. Принтер также работает с метаматериалами, клеточными культурами, технологиями тканевой инженерии, микроробототехникой и структурированием поверхности.
«Altraspin, спроектированный компанией Microlight3D, отвечает требованиям к более индивидуальному изготовлению и быстрому прототипированию субмикронных деталей без ограничений, накладываемых их геометрией или естественной формой», — говорит Дэнис Барбьер. «Мы избавились еще от одного ограничения, расширив выбор пользователя в отношении материалов, доступных для 3D-микропечати. Принтер Altraspin совместим с широким спектром полимеров и биоматериалов. Нет сомнений, что субмикронное разрешение, которое обеспечивает наша технология, является ключевым фактором нашего успеха в научном сообществе. Мы ожидаем, что промышленные компании также выиграют от преимуществ нашего 3D-принтера для микродеталей, созданного преодолевать ограничения и сокращать время вывода продукции на рынок».
Субмикронное разрешение принтера Altraspin, доходящее до 0,2 мкм, основано на методе прямой лазерной записи при двухфотонной полимеризации, а также запатентованной технологии «непрерывной печати». Данная технология не ограничена традиционным подходом к нанесению материала слоями, при котором разрешения 3D-печати составляет 25 мкм. Благодаря субмикронному разрешению Microlight3D можно печатать настолько гладкие микродетали, что они не требуют дополнительной обработки. Устранение этого этапа обеспечивает экономию времени и денег для производителей.
В Altraspin входит новый режущий элемент, принтер обладает высоким разрешением записи и точностью, высокой скоростью записи для создания сложных 3D-конструкций. Он совместим с любыми моделями и файлами из САПР, а его компактная конструкция позволяет размещать его в шкафах с ламинарным потоком воздуха, чистых комнатах и стерильных средах, необходимых для предотвращения загрязнений полупроводниковых пластин.
При проектировании Altraspin в компании Microlight3D уделили особое внимание простоте использования. После того, как пользователь создает 3D-модель с помощью стандартных инструментов САПР и выбирает подходящий полимерный материал, алгоритмы Microlight3D рассчитывают маршрут движения лазера для создания объекта. Лазерными импульсами выполняется запись непосредственно внутри ванны с жидким материалом, при этом по маршруту движения происходит затвердевание с высочайшей точностью — менее микрона. Поскольку лазер может свободно и непрерывно перемещаться, с его помощью можно создавать весьма сложную архитектуру без ограничений традиционного подхода с нанесением по одному слою за раз. По завершении операции растворителем смывается избыток мономера, поэтому пользователь может сразу брать объект, идентичный исходной модели, в руки.
лучших моделей игрушек для 3D-печати・Культы
Серп
1,14 €
Garchomp — фан-арт концепт покемонов
14,75 €
Перебор по средам
4,92 €
Weapon X Full Body Concept — росомаха — логан
24,59 €
КАПИТАН УТКА — КРАСНЫЙ ПАТРУЛЬ
28,51 €
Eternal Edge ~Kamen Rider Eternal
3,45 €
Приятель под покраску
0,56 €
Transformers Studio Series Дополнение Optimus Prime Energon Swords
1,89 €
Дополнение Starscream Thruster серии Transformers Studio
Российская противобатарейная радиолокационная система.
14 евро
Игрушки 3D Модели — Скачать Игрушки 3D Модели 3DExport
Игрушки 3D Модели — Скачать Игрушки 3D Модели 3DExport
3D-модели / Игрушки 3D-модели
2487 товар (ы)
Здесь у нас есть широкий ассортимент игрушек 3d моделей создан профессиональными 3D-художниками. Вы будете впечатлены их реалистичным дизайном и высоким качеством. Здесь вы можете найти и скачать 3d модели игрушек . Эти 3D-игрушки идеально удовлетворят потребности ваших проектов, и каждая модель доступна в форматах MAX, C4D, BLEND, FBX, STL и OBJ. Свяжитесь с нашей службой поддержки для получения нужного вам формата. Не забудьте просмотреть категории Спортивные 3D-модели и 3D-модели транспортных средств.
Фильтр поиска
Конкретный продавец
Детали
Анимированные
Текстурированный
Оснащенный
Материалы
Низкополигональная
Коллекция
UVW картографирование
Используемые плагины
Готов к печати
3D сканирование
Контент для взрослых
ПБР
Идентификатор товара
Только бесплатные продукты
Скидка
Популярные форматы (.max) 3DS MAX (.3ds) 3DS MAX все версии (.c4d) Cinema4D (.fbx) Autodesk FBX (.obj) Wavefront OBJ (.dxf) ArchiCAD (собственный) (. dwg) AutoCAD (собственный) (.ma) Maya (.lwo / lws) Lightwave (.xsi) Softimage XSI (.3dm) Rhinoceros (.stl) Stereolithography (.iges) IGES (.step) STEP (.blend) Blender (.skp ) SketchUp(.jpg) Текстуры изображений(.png) Текстуры изображений3DS MAX(.max) 3DS MAX вер.2022(.max) 3DS MAX вер.2021(.max) 3DS MAX вер.2020(.max) 3DS MAX вер. 2019(.max) 3DS MAX ver.2018(.max) 3DS MAX ver.2017(.max) 3DS MAX ver.2016(.max) 3DS MAX ver.2015(.max) 3DS MAX ver.2014(.max) 3DS MAX вер.2013(.max) 3DS MAX вер.2012(.max) 3DS MAX вер.2011(.max) 3DS MAX вер.2010(.max) 3DS MAX вер.2009(.max) 3DS MAX вер.2008( .max) 3DS MAX ver.9(.max) 3DS MAX ver.8(.max) 3DS MAX ver.7(.max) 3DS MAX ver.6(.max) 3DS MAX ver.5(.max) 3DS MAX версия 4(.max) 3DS MAX версия 3(.max) 3DS MAX(.3ds) 3DS MAX все версии Cinema4D(.c4d) Cinema4D(.c4d) Cinema4D r21(.c4d) Cinema4D r20(.c4d) Cinema4D р19(.c4d) Cinema4D r18(.c4d) Cinema4D r17(.c4d) Cinema4D r16(.c4d) Cinema4D r15(.c4d) Cinema4D r14(.c4d) Cinema4D r13(.c4d) Cinema4D r12(.c4d) Cinema4D r11(. c4d) Cinema4D r10(.c4d) Cinema4D r9Maya(.mb) Maya 2018(.mb) Maya 2017(.mb) Maya 2016(.mb) Maya 2015(.mb) Maya 2014(.mb) Maya 2013(.mb) Maya 2012(.mb) Maya 2011(.mb) Maya 2010(.mb) Maya 2009(.mb) Maya 2008(.mb) Maya 8.5(.mb) Maya 8(.mb) Maya(.ma) MayaLightwave(. lwo / lws) Lightwave вер. 11.6(.lwo / lws) Lightwave вер. 11,5(.lwo / lws) Lightwave вер. 9(.lwo / lws) Lightwave вер. 8(.lwo / lws) Lightwave вер. 7Softimage(.xsi) Softimage 7.5(.xsi) Softimage 7(.xsi) Softimage 6(.xsi) Softimage XSIImage Textures(.jpg) Image Textures(.png) Image Textures(.psd) Adobe Photoshop(.hdr) Image Textures (.exr) Текстуры изображений (.tif) Текстуры изображений (.tga) Текстуры изображений (.gif) Текстуры изображений (.svg) Текстуры изображений (.psp) Paint Shop Pro (.i3d) Houdini Image 3D Fileother (.sat) ACIS (.rvt) Autodesk Revit (.rfa) Autodesk Revit Family (.iam) Autodesk Inventor IAM (.ipt) Autodesk Inventor IPT, (.gsm) ArchiCAD GSM (.lcf) ArchiCAD Librry Файл-контейнер (.pla) PLA (.pln) ) PLN(.ls) Lumion 3D(. tcw) TurboCAD(.lxo) Luxology Modo(.w3d) Shockwave3D(.r3d) Realsoft 3D(.bip) Hypershot(.zpr) ZBrach(.vue) Vue(.vob) Bentley Eon Vue(.vdb) DreamWorks Animation OpenVDB(.tpf) PlantFactory(.3b) 3D Coat(.jas) Cheetah4D(.ply) Agisoft Photoscan(.m3d) КОМПАС 3D(.ms3d) MilkShape 3D(.gmf) Leaderwerks(. dbo) DarkBASIC Object(.dts) Torque(.dff) Zanoza ZModeler 3(.b3d) Beyond3D(.rh) Deep Exploration(.sldprt) SolidWorks(.prt) Creo 4 (файл детали)(.dae) Collad тип файла (.ocs) Octane Render (.pdf) Portable Document Format (.doc) Microsoft Word (.mpg) MPEG (.avi) Video (.mp4) Video (.zprj) CLO3D Project File (.jcad/.jcd ) Jewelry Cad(.vox) MagicaVoxel(.ifc) Интерполярность BIM(.x) DirectX(.wrl) VRML Worlds(.unitypack) Unity 3D(.uasset) Unreal Engine(.psmodel) PowerShape(.pdo) Pepakura Designer 4( .x_t) Parasolid (.ksp) Keyshot (.glb / .gltf) Формат передачи GL (.catpart / .catproduct) CATIA (.abc) Alembic (.py) Python (.fbm) FreeShip (.art) ARTCam (.jrs) ) T-Flex.cad(.tm) Twinmotion(.duf) DAZ Studio
RelevancePrice: High firstPrice: Low firstNewestViewsRatingVotesCommentsBest Sales
Друзья, мы продолжаем рассказывать вам о новых функциях и улучшениях Fusion 360, которыми разработчики радуют пользователей с завидной регулярностью. Сегодня разберем интересные инструменты октябрьского релиза. Надеемся, это поможет вам в вашей работе. Приятного чтения!
Удобство использования
Доступ к истории версий дизайна из браузера
Теперь у вас есть возможность получить доступ к истории версий вашего проекта прямо из компонента в браузере. В настоящее время можно использовать для этого как корневые, так и вставленные компоненты. Это первое из многих изменений во Fusion 360, которые уменьшают различия между привычным ПО для настольных ПК и облачной средой данных.
Сохранение изменений и этапов на уровне детали
Ранее при редактировании по месту (Edit-in-Place), когда вы пытались сохранить изменения в сборке, в составе которой есть детали, связанные с внешней ссылкой, и помечали изменения как этап (milestone), он фиксировался только в самой сборке, а не в детали, на которую указывает ссылка.
Разработчики расширили возможности сохранения. Теперь вы можете включить более детальные параметры, позволяющие фиксировать этапы как на уровне сборки, так и на уровне детали.
Теперь команда отмены Undo отменяет состояние документа
Наверняка вы замечали, что при внесении изменений в сохраненный документ рядом с его названием на вкладке появляется звездочка (*). Это показывает, что в документе есть несохраненные изменения. Раньше при нажатии кнопки Undo действие отменялось, но состояние документа оставалось прежним. Теперь же при использовании кнопки Undo отменяется как действие, так и состояние документа – он возвращается к первоначальному состоянию до момента внесения изменений, на что указывает отсутствие звездочки рядом с именем на вкладке документа.
Смена среды и процесс редактирования по месту теперь не меняет состояние документа
Когда вы использовали Edit-in-Place без фактического выполнения каких-либо действий, в ваш документ добавлялась звездочка, которая указывала на изменение состояния проекта. Переключение с Design на другое рабочее пространство также приводило к подобному эффекту. Этот алгоритм был изменен. Теперь, когда вы входите и выходите из Edit-in-Place без какого-либо фактического моделирования или переключения на другое рабочее пространство, проект будет оставаться неизменным.
Улучшения в использовании инструментов анализа Zebra, Curvature Map, & Curvature Comb
Ранее при использовании в проектах инструментов анализа Zebra, Curvature Map, & Curvature Comb вам было сложно найти различные параметры. Расположение ползунков также было неудобным, поэтому разработчики решили это улучшить. Теперь параметры в этих типах анализа отображаются в виде кнопок, которые больше не прячутся в раскрывающихся меню. Неудобные переходы по стрелкам исчезли, а ползунки располагаются напротив соответствующих параметров, что делает использование диалогов удобным и интуитивно понятным.
Эскизы и моделирование
Создание текста по контуру
Теперь у вас появилось множество возможностей при создании текста в среде эскиза.
Как видно на скриншотах, все опции в команде говорят сами за себя. Чтобы увидеть их в действии и узнать, как работают команды, посмотрите руководство Кевина Кеннеди.
Доступ к инструментам Arrange и Simplify можно получить из среды Design
Теперь у вас есть возможность добавить инструменты раскроя и упрощения в рабочее пространство моделирования, перейдя в раздел General > Design ваших настроек и установив флажок Enable Arrange and Simplify tools. После применения вы увидите инструменты Arrange и Simplify под вкладкой Solid Tab > раскрывающееся меню панели Modify.
Примечание. Инструмент Arrange появится только в том случае, если у вас включен параметр Arrange Preview Feature (Preferences > Preview Features). Обратите внимание, что эта функция доступна только в студенческой, стартап- и платной подписках.
Параметр Tangency Weight для команды Fillet
В команду «Сопряжение» добавлена новая опция Tangency Weight. Изменение значения данного параметра приведет к изменению кривизны касательности сопряжения, что позволит точно настроить геометрию сопряжения.
Создание линейчатых поверхностей из эскизов
Этим летом разработчики представили инструмент Ruled Surface. С тех пор его алгоритмы улучшились и стали более надежными, что повысило производительность создания линейчатых поверхностей из эскиза.
Разработка электроники
Дополнительный контроль размещения отверстий со ссылкой
Теперь вы сможете размещать отверстия прямо в редакторе 3DPCB, используя ссылки. Отверстия, размещенные непосредственно на печатной плате, также появятся на шкале времени 3DPCB, что позволит вам точно настроить их расположение, параметрически привязав к краям других компонентов.
Настройка посадочных мест Footprint Pads
Редактор библиотеки Fusion 360 включает калькулятор корпусов, который способен построить 3D-модель и посадочное место компонента за один шаг. Теперь в диалоговом окне Package Generator у вас есть возможность выбрать использование соответствия IPC или настроить параметр посадочного места без ущерба для деталей 3D-модели. Есть некоторые преимущества изменения размера контактной площадки, например, увеличение площади контактной площадки для ручной пайки или уменьшение ее размера из-за ограниченного пространства. Эта функция в настоящее время поддерживается в шаблонах SOIC, Chip, SOD и Molded Body. В будущих обновлениях будет добавлено больше возможностей.
Поддержка шрифтов True Type
В последнем обновлении была добавлена поддержка промышленного экспорта для собственных шрифтов, доступных в редакторах электроники. Теперь Fusion 360 поддерживает все установленные шрифты True Type. Вы сможете задокументировать свою схему и печатную плату с помощью различных шрифтов, которые улучшат эстетику вашего электронного проекта. Все шрифты True Type поддерживаются в CAM Gerber Output.
Создание копии дизайна
После создания документа электронного устройства у вас есть возможность создать новую схему / плату или сослаться на готовые. Обычно готовые проекты переделываются и адаптируются к обновлению продукта. Связь существующих проектов с новыми может привести к проблемам согласованности исходного проекта при добавлении новых компонентов или соединений. В диалоговое окно Reference to добавлена опция Create a Copy, которая защитит целостность оригинального дизайна.
Назначение Spice Model
Редактор схем Fusion 360 включает движок NGSPICE, который позволяет запускать моделирование на вашей схеме в аналоговом, цифровом и смешанном режимах. Чтобы это работало, вам нужно добавить в компонент модель SPICE. Обновленный интерфейс позволит легко находить инструменты для добавления и удаления моделей SPICE к вашим схематическим символам. Сопоставление моделей SPICE можно выполнить в редакторе библиотеки или непосредственно в схеме.
Уведомление проверки входных данных
В шаблоны генератора корпусов добавлено сообщение об ошибке проверки, которое извещает о недопустимом параметре.
Интерфейс устройства
Новый интерфейс устройства предоставляет более подробную информацию о посадочном месте устройства, имени корпуса, имени варианта и успешном назначении 3D-модели.
Пользовательский интерфейс устройства был обновлен, чтобы предоставить более детальную информацию о том, какие посадочные места можно использовать.
Generative Design
Избранные итерации результатов
Теперь вы можете добавлять итерации промежуточных вариантов в избранное (Favorites) и рассматривать их как обычные результаты. После добавления избранные итерации результатов отображаются в представлениях исследования и могут быть отфильтрованы. Опция Favorites позволяет сравнить промежуточную итерацию с другими результатами. Кроме того, она дает возможность анализировать разные итерации одного и того же варианта.
Тенденция итераций
Разработчики также расширили функциональность представления точечной диаграммы, чтобы показать тенденцию итераций процесса оптимизации варианта.
Рекомендуемые результаты
Механизм рекомендаций предлагает рекомендуемые результаты на основе указанных критериев и отображает 4 лучших варианта, чтобы помочь вам быстро найти среди всех сгенерированных результатов те, которые наиболее соответствуют вашим требованиям. Панель настроек рекомендаций также позволяет настраивать критерии и определять, насколько они важны.
Удобство использования панели итераций
Отныне все основные характеристики итераций варианта, такие как полученный дизайн, метки, избранное и рекомендация, будут представлены в виде отдельного значка на панели итераций в представлении результатов.
Дополнительный вариант для методов производства 2-осевой резки, 3- и 5-осевого фрезерования
Экспериментальные решатели для генеративного дизайна и Features Tech Preview предоставляют два дополнительных варианта для производственных настроек 2-осевой резки, а также для каждой производственной настройки 3- и 5-осевого фрезерования. Ограничение симметрии поддерживается для 3- и 5-осевого фрезерования.
Расчеты
Отдаленные ограничения (Remote Constraints)
Теперь вы можете добавить отдаленное ограничение как часть задания условий для вашего исследования моделирования Simulation Study. Выберите грань модели, а затем определите положение узла, используя координаты x, y, z, и зафиксируйте направления поступательного и вращательного движения. Граничное условие Remote Constraint передается в модель через линейные элементы.
Отдаленный момент (Remote Moment)
Кроме того, вы также можете добавить Remote Moment. Выберите грань модели, а затем определите местоположение узла, используя координаты x, y, z, а затем укажите значение момента либо нормальное направление, либо направление угла с опорными векторами или векторами x, y, z. Граничное условие Remote Moment передается через линейные элементы в модель.
В области сердечника вентилятора отображается значение скорости
Как показано ниже, ранее при просмотре результатов скорость воздуха рядом с лопастью в области сердечника вентилятора охлаждения отображалась как нулевая. Это могло привести к неверному представлению о том, как воздух перемещается вентилятором.
Теперь скорость в области сердечника вентилятора отображается правильно.
Чертежи
Создайте иерархическую спецификацию деталей или для всех уровней
До сих пор в среде «Чертежи» спецификации ограничивались компонентами верхнего уровня, что не позволяло вам углубляться в структуру узлов сборки. В этом обновлении команда Parts List позволяет вам выбирать между структурой первого уровня (First) или всех уровней (All Level). При этом в спецификации для всех уровней перечислены все подсборки и подкомпоненты с поддержкой автоматической простановки позиций, перенумерации на первом или последнем уровне, а также шаблоны.
Примечания к отверстию и резьбе
В этом релизе появилась одна из наиболее востребованных функций. Теперь у вас есть возможность создавать условные обозначения отверстий с помощью новой команды Hole and Thread Note.
Вы можете автоматически размещать примечания к отверстиям для элементов отверстий, принадлежащих выбранной кромке, в соответствии со стандартами ISO и ASME (в зависимости от вашего чертежа). Хотя Fusion 360 пока не поддерживает резьбовые элементы, разработчики планируют реализовать это в ближайшем будущем (отсюда и название ??). В этой функции есть нечто большее, чем кажется на первый взгляд – узнайте больше о команде для умных примечаний здесь, чтобы быстро добавлять аннотации для разных объектов, включая примечания к отверстию.
Производство
Manufacturing Models
Вы когда-нибудь хотели внести правки в модель для конкретного способа производства, не изменяя исходный дизайн? В этом вам могут помочь Manufacturing Models.
Теперь вы можете создать несколько производственных моделей в рабочем пространстве Manufacture, которые ссылаются на модели из текущего документа или даже из внешних документов. Вы также можете редактировать эти производственные модели, чтобы упростить производственные операции, и это не повлияет на исходную модель. Однако, если в какой-то момент вы вернетесь в рабочую область Design и внесете изменения в исходную модель, эти изменения будут перенесены на все существующие и будущие производственные модели.
Инструменты для обработки канавок при профилировании
Концентрация усилий разработчиков на совершенствовании алгоритма токарной обработки была вызвана настройкой более гибкой среды. Частью долгосрочного плана является предоставление пользователям возможности использовать любой тип инструмента в любой стратегии.
Включение инструментов для обработки канавок в стратегии профилирования чистовой обработки профиля является первым шагом в этом направлении. Позже планируется внедрить такую же возможность и в черновую обработку профиля. Это даст пользователям больший контроль, чтобы использовать эти стратегии без каких-либо ограничений.
Библиотека шаблонов
Новая библиотека шаблонов – это эффективный способ хранения, управления и повторного использования шаблонов траекторий для обработки. Это лучший способ автоматизировать программирование.
Part Alignment (Расширенные опции)
Измерение деталей сложной формы на фрезерном станке. Измеряет состояние припуска произвольной геометрии с помощью замера Inspect Surface и регулирует положение траекторий фрезерования, чтобы оптимально разместить их для имеющейся заготовки. Типичные области применения – это машинные настройки для обработки заготовки сложной конфигурации, изготовленной с минимальными припусками по размерам и форме от конечной детали, такими как литье или ковка. Part Alignment позволяет оптимизировать установку по 3, 4 или 5 осям в зависимости от возможностей станка.
Angled Entry
Разработчики внедрили угловой подвод в новые стратегии профилирования! Это была одна из самых востребованных функций предыдущей профильной стратегии.
Более надежный алгоритм черновой обработки поддерживает краеугольные функции, такие как фиксированные циклы в стратегиях.
Разработчики изменили способ управления подводом и отводом фрезы для черновой обработки. Добавление двух полей для зазора по Z и X расширяет черновые проходы за пределы заготовки для обеспечения дополнительных перемещений резания за пределами определенной области материала. Однако при выполнении нестандартных черновых проходов необходимо контролировать угол столкновения фрезы с материалом и то, насколько быстро или медленно происходит этот процесс.
Angled Entry автоматически проверяет подвод, чтобы убедиться, что вы не зарезаете модель или область, в которую не может поместиться созданная траектория инструмента.
Угол, который вы выбираете для подвода в черновых проходах, отсчитывается от Z и обычно находится в диапазоне от 0 до 120 градусов. Вы можете поменять значение угла на 360, но при учете зарезов большинство значений за пределами этого диапазона будет непригодно.
Entry Angle также включает два других параметра – зазор подвода Entry Clearance, который представляет собой длину прохода под заданным углом, и скорость подачи при подводе Entry Feed – позволяющие устанавливать индивидуальную скорость подачи для каждого движения инструмента при подводе независимо от скорости подачи траектории резания.
Импорт результатов проверки
Import Inspection Results теперь показывает предварительный просмотр результатов проверки, когда вы выбираете файл, содержащий измеренные точки или объекты. Это поможет вам визуализировать результаты при импорте и позволяет при необходимости установить тела для проекции (Bodies for Projection). Также использование процесса Part Alignment может быть очень полезно, если вы используете разные тела для определения заготовки и приспособлений.
Проверка поверхности
Инструмент Inspect Surface был дополнен поддержкой расчета результатов проверки в реальном времени на контроллере ЧПУ по мере выполнения команд измерения. Чтобы поведение Inspect Surface было более согласованным с Probe Geometry, также была добавлена вкладка Action, которая позволяет вам останавливать последовательность замеров с предупреждением, в случае если результаты проверки выходят за пределы допуска.
Import Macro Print Results
Эта новая возможность, расширяющая отчеты о проверках, позволяет включать в отчет круговые элементы Probe Geometry. Эта функция, доступная теперь в режиме Preview, позволяет измерять ответственные отверстия и выступы, а также сохранять результаты во Fusion 360. Она импортирует результаты печати, полученные с помощью решений на основе макросов (например, Renishaw), создает графическую визуализацию результатов и позволяет включить эти элементы в отчет о проверке.
Управление ориентацией инструмента поворотом и наклоном (Расширенные опции)
В раздел Tool Orientation формы стратегии траектории инструмента были добавлены новые графические средства управления ориентацией инструмента поворот (Turn) и наклон (Tilt). Эти элементы управления позволяют настроить ориентацию инструмента в нужном направлении. Средства управления поворотом и наклоном очень полезны, когда требуемая ориентация инструмента не может быть определена путем выбора существующего элемента геометрии.
В дополнение к этим графическим средствам управления есть новая кнопка Align to View, при нажатии которой ориентация инструмента совмещается с углом обзора пользователя. Этот вариант может быть полезен, когда сборка инструмента должна уместиться в ограниченном пространстве. Пользователь может повернуть вид перед нажатием кнопки Align to View. Значения параметров поворота и наклона обновятся.
Данный инструмент управления ориентацией сохраняет полную ассоциативность с геометрией, на основе которой она изначально была определена.
Аддитивные технологии
Technology–agnostic
Индивидуальные настройки автоматической ориентации (доступны для FFF и SLM) и настройки опорных структур (только SLM) могут быть сохранены в библиотеке шаблонов для повторного использования в других настройках аддитивного производства, что упростит подготовку к 3D-печати.
Поддержка FFF-принтеров Anycubic
Библиотека Fusion Machine теперь включает шесть 3D-принтеров Anycubic. В библиотеке постпроцессоров также есть постпроцессор для данного типа принтеров, поэтому пользователи могут настраивать печать и генерировать g-код для своих машин.
Additive Build Extension
Разработчики внедрили во Fusion 360 рабочие процессы производства порошкового металла, которые теперь доступны в диалоговом окне Extensions в новом разделе Additive Build. Этот производственный процесс позволит вам упорядочивать / ориентировать детали на платформе, создавать полностью ассоциативные опорные структуры, резать модели по слоям и выводить подготовленные файлы в нативном формате, включая параметры лазера или файл 3MF.
Multi-extruder selector
Теперь вы можете выбрать, какой экструдер будет использоваться в качестве основного для мультиэкструдерных принтеров FFF на вкладке Basic диалогового окна Print Settings Editor.
Выпадающая панель Supports
Раньше раскрывающаяся панель Supports представляла собой плоский список инструментов без видимого порядка. Разработчики добавили несколько разделителей и реорганизовали их, чтобы они лучше подходили для настройки аддитивного производства с принтерами для печати металлическим порошком.
Следите за новостями продукта и общайтесь с единомышленниками в официальной группе Fusion 360 на платформе ВКонтакте. А мы постараемся чаще делиться с вами полезным контентом. До встречи!
Как создать футуристичную пулю во Fusion 360
Привет, я Женя Пак, художник по оружию в People Can Fly и преподаватель курса Hard Surface в XYZ. В этом материале я на примере конкретного проекта покажу, как устроена программа Fusion 360, а также немного расскажу о принципах дизайна. Всё будет просто — можешь скачать Fusion и повторять за мной.
Почему Fusion?
Fusion 360 — это программа кат-моделинга, которая позволяет забыть о топологии. В ней мы, по большей части, работаем с solid-объектами и операциями сочетания и вычитания, — и нам не нужно думать о полигонах.
Совет: отключаем «историю» при работе во Fusion – основные действия и объекты будут доступны в другой панели.
Любое моделирование начинается с дизайна. Тут есть два возможных подхода:
Практический — тщательное размышление о том, как этот объект должен быть устроен, какую несёт функцию, как используется в быту и т.д. Обычно используется при работе в реалистичном стиле.
Эстетический — отталкиваемся от назначения объекта в целом: его места в сеттинге и того, насколько он интересен. Этот подход отлично себя чувствует в фантастическом жанре: художник опирается не на реальные законы физики, а на заданную сеттингом условность. Это даёт больший простор фантазии и позволяет развернуться.
Сегодня наша цель – создать простую, но интересную модель. Для этого ещё на этапе подготовки нужно собрать референсы. Выбрав один главный референс, ты сможешь отталкиваться в работе от конкретного образа, добавляя к нему своё.
В данном случае за основу был выбран снаряд.
Работа с основной формой
Начнём со скетча, — иначе говоря, с чертежа. Разместить его можно на любой плоскости по трём осям, придав любую форму. В случае с пулей мы создаём круг на плоскости X, Y: из него мы затем сможем сделать solid-объект. Нажимаем в открывшейся панели Solid на инструмент Extrude, и с помощью него вытягиваем solid-объект нужной нам высоты.
Ещё один способ вернуться к созданию скетчей — нажать хоткей «L».
При этом сам скетч остался: мы можем переключиться на него, нажав соответствующую вкладку на панели слева, и продолжить работу. Можем изменять скетчи, выдавливать из них новые solid-объекты и применять к ним различные инструменты.
Дизайн пули часто не подразумевает сложных форм и силуэтов, но чтобы работа получилась более интересной, мы сделаем насечки. Для этого возвращаемся к скетчам:
Выбираем Line Sketch. Скетчи, как я уже говорил, можно создавать на одной из трёх плоскостей — на этот раз нам нужна Z, Y. Применяем для созданного скетча Extrude и задаём нужную высоту. Чтобы вытянуть объект в обе стороны, выбираем в меню Symmetric, и с помощью опции Cut отрезаем часть ранее созданного solid-объекта.
Таким образом можно сделать насечку, работая со скетчем. Неплохой способ, когда деталь нужна одна. Но если их требуется больше, то есть более удобный вариант.
Чтобы сделать сразу несколько «вырезов», вместо Cut выбираем New Body, и к появившемуся новому объекту применяем Circular Pattern. Теперь для появившихся объектов используем команды Combine и Cut, и получаем на выходе solid-объект с насечками в нужном нам количестве.
В контекстном меню выбираем объект, который будем множить и ось, из которой будет исходить программа.
Если итоговый результат нас не устраивает, например, нужно изменить длину насечки, — то можно вернуться к размноженным объектам, и с помощью Offset Face поэкспериментировать с формой объектов.
Забегая вперёд, важно сказать ещё пару слов о таком правиле дизайна, как комплексность.
При работе с объектом не стоит визуально делить его на равные части — фокус внимания теряется. Чтобы этого избежать, соседние сегменты должны отличаться по длине. Вот как это выглядит в нашем случае:
На скриншоте выше видно, что у нашей пули появилась хвостовая часть. Для её создания мы использовали всё те же инструменты.
Через Extrude вытягиваем всё тот же основной solid-объект, но выбираем пункт New Body. Таким образом, у нас появился второй объект, с которым мы можем работать отдельно.
Для удобства скрываем ненужные в работе элементы, нажав на иконку «глаз» рядом с объектом.
Итак, чтобы дизайн смотрелся органично, нам нужно визуально разделить две его части. Для этого сделаем кольцевую насечку, используя всё те же чертежи: на плоскости объекта рисуем два круга разных диаметров и выделяем область, которую будем отрезать.
Затем, чтобы так же уравновесить дизайн, изменим форму нижней части детали. На этот раз с помощью Offset Plane создаём вторую рабочую поверхность от нижнего основания детали. Этот способ позволит не просто выдавить объект, а сделать плавный переход из одной формы в другую.
Для примера возьмём чертежи — круг и шестигранник. Первый размещаем на созданной только что рабочей поверхности, второй (чуть меньший) — на ещё одной, специально созданной уже от неё. Если нам нужны не слишком резкие углы у шестигранника, применяем к ним Fillet.
Создаём поверхности.
Теперь с помощью Loft соединяем два скетча и получаем новый объект нестандартной формы.
Раскрыв первый объект, мы можем посмотреть на композицию в целом. При желании, воспользовавшись инструментов Move/Copy, изменяем положение детали относительно других. Завершает этот этап команда Combine: с её помощью выделяем объекты и объединяем их в один.
Совет: на этапе работы с грубой формой и при размещении деталей время от времени отдаляйте камеру и смотрите на результат со стороны. Так вы сможете вовремя заметить нарушающие композицию элементы и легко переместить/удалить.
Приступаем к завершающему этапу работы с формой — составлению наконечника. Он станет нашей главной точкой интереса.
Так как мы делаем пулю для фантастического сеттинга, можно добавить ей парящую деталь. Для этого используем все те инструменты, о которых я рассказал выше, либо создаём новый объект из уже имеющегося с помощью Offset Plane и Split Body.
Во втором случае выбираем объект, который хотим разрезать и плоскость, которая будет разрезающей. Применяем Move/Copy и поднимаем новый объект «в воздух».
Есть и другой способ. Если нам нужен не весь срез, а конкретная его часть, переходим в скетчи и изображаем нужную фигуру на поверхности объекта. В нашем случае это «звезда».
Делается она просто: с помощью скетчей и инструментов Mirror и Press Pull.
Создаём плейн и рисуем на нём скетч: отмеряем линию, по которой будем отражать лучи, и размещаем остальные. Применяем Mirror, выбрав команду Circular Pattern, задаём нужное количество паттернов, после чего соединяем их между собой.
Доделав скетч нужной формы, нажимаем Press Pull и выделяем объекты, которые хотим вытягивать.
О том, как создавались элементы в центре наконечника, расскажем во втором блоке, а на этом работа с основной формой завершена.
Чтобы шаг за шагом разобраться в программе Fusion 360 и задизайнить сложный футуристичный ассет всего за девять занятий — записывайся на курс Hard Surface LITE. Читай подробности в статье.
Прорабатываем детали
Начнём с проработки наконечника. Теперь поговорим о том, как сделать те самые детали, на которые просили не обращать внимание.
Возвращаемся к Body 7 (третий объект, над которым парит «звезда»). На скрине выше видно, что он имеет три засечки. Их мы сделали с помощью инструмента Chamfer.
Выделяем нужные грани.
Лайфхак: если не можешь найти тот или иной инструмент во вкладках, есть и другой способ. Нажимаем горячую клавишу «S» и вводим название в открывшейся панели Design Shortcuts.
Чтобы закрепить команду на панели, жмём стрелку рядом с командой.
Далее переходим к чертежам, размещать их будем на поверхности объекта.
Здесь всё просто: используя различные инструменты, составляем нужную нам фигуру. В нашем случае это круг и прямоугольники — как сделать их в нужном количестве и положении ты уже знаешь.
Далее берём скетч и выделяем те его части, которые хотим «выдавить». Применив Offset Place, можно вручную настроить, насколько будут выступать отдельные детали.
Совет: при работе с деталями всегда держите в голове их количество. Это позволит избежать ситуации, когда обилие деталей делает дизайн слишком «шумным».
Вот так выглядит верхнее основание с отображением звезды:
Этот вариант мне показался скучным, и я решил добавить уровней. Для этого возвращаемся к скетчу звезды и выделяем другие области, к которым применим Extrude.
Но теперь эти два объекта слишком похожи и смотрятся неинтересно. Исправляем это, применив Fillet к верхней звезде.
Порой во время творческого процесса какой-то элемент может показаться неуместным или не столь удачным, как планировалось. Смело избавляйтесь от него, как это сделал я, применив Offset Face к пирамидам в центре.
Если выделить вершины, а затем навести мышь на поверхность и применить команду Offset Face, то можно сравнять вершины с поверхностью
А на месте пирамид появился круглый вырез, который уравновесил композицию. Смягчили переход чамфером.
Теперь поговорим о том, как добавлять детали на остальной модели.
Здесь нам поможет «бутерброд». Это ещё одно правило, которое помогает уравновесить элементы дизайна. Его иллюстрирует вот эта картинка:
Добавляя детали вблизи границ секций, мы «поддерживаем» их, и композиция обретает осмысленность.
На финальном этапе продолжаем делать засечки с помощью Sketch Palette и Extrude.
Возвращаемся к нижней части модели, чтобы доработать форму и сделать её интереснее.
Итоговая модель выглядит так:
Важно: следи за контрастом плоскостей. В то время как за мелкие детали глаз цепляется, большие плоскости уравновешивают их и дают «отдых».
Работаем с нижней частью модели — добавляем засечки. Чтобы сделать их сразу несколько на разных ярусах, создаём Midplane. Как ясно из названия, он автоматически размещается посреди выбранного объекта. Дальше — снова «зеркалим» нужные.
Финальный штрих — дорабатываем основание модели, также исходя из правила комплексности, и обрабатываем грани при помощи Fillet.
Вот так выглядит наша модель после подбора материалов:
***
Если хочешь более глубоко освоить программу Fusion 360 и научиться создавать более интересные модели, — записывайся на мой курс Hard Surface Lite. Он стоит гораздо дешевле, чем основные курсы XYZ, но, пройдя его, ты сможешь спокойно создавать несложные hard surface модели.
Что ты получишь на курсе?
Доступ ко всем лекциям курса
Доступ в специальный канал в дискорде
Общий стрим с выборочной проверкой дипломных работ
Скидку на полный курс Hard Surface
Ежемесячный стрим с ответами на вопросы на протяжении 5 месяцев
Узнать подробности о курсе и зарегистрироваться можно здесь: https://www.school-xyz.com/hard-surface-lite
Рисование на криволинейных поверхностях и сферах в Fusion 360
Fusion 360
ByMohamed Fakhry
Результат — с помощью облачной визуализации в Fusion 360.
Вы узнаете, как оборачивать 3D-текст вокруг изогнутой поверхности и сферы. Не пропускайте ни один из шагов. Каждый этап в этом руководстве дополняет другой для достижения указанного выше результата.
✨ Совет: прочитайте наш предыдущий пост об основах скетчинга.
Рисование на криволинейной поверхности
Обтекание цилиндра текстом, эскизами и узорами.
Шаг 1
В раскрывающемся меню СОЗДАТЬ на панели инструментов > Щелкните Создать эскиз. Выберите плоскость, параллельную грани кривой.
В режиме редактирования перейдите в меню СОЗДАТЬ > Текст > Нажмите и перетащите, чтобы ввести текст. Используйте окно ТЕКСТ для настройки свойств > Нажмите OK.
Выберите текстовый эскиз > раскрывающееся меню ИЗМЕНИТЬ > Нажмите «Переместить/Копировать» (сочетание клавиш: M). С помощью стрелок перетащите эскиз перед поверхностью.
✨ Совет. Чтобы использовать импортированный профиль: перейдите в раздел Вставить стрелку раскрывающегося списка > Вставить SVG/DXF > Нажмите Вставить с моего компьютера > Найдите и выберите файл чертежа > Нажмите Открыть > Выберите плоскость, вертикально параллельную цилиндру > Перетащите стрелки, чтобы выровняйте профиль с цилиндром > В окне INSERT SVG нажмите OK. Перейдите к следующему шагу…
Шаг 2
Выберите эскиз > раскрывающееся меню СОЗДАТЬ > Нажмите Тиснение.
Шаг 3
В окне EMBOSS рядом с «Границы» > нажмите «Выбрать» > выберите цилиндр > нажмите «ОК».
✨ Совет: немного увеличьте значение глубины для большего контроля над экструзией в дальнейшем.
Эскизы скрыты по умолчанию после тиснения, в случае нескольких тиснений, отобразите слой эскиза в БРАУЗЕРЕ, под стрелкой раскрывающегося списка категории «Эскизы» > переключите глаз слоев эскиза, чтобы отобразить их.
На втором этапе мы создаем сферу, используем команду Press Pull, чтобы захватить заднюю поверхность всех букв в центр сферы, затем используем смещенную поверхность, чтобы разделить переднюю поверхность букв. В результате имеем концентрические рельефные поверхности и единый сферический корпус.
Эскиз на сфере
Вставьте эскиз из цилиндра в сферу.
Создать сферу
Раскрывающееся меню СОЗДАТЬ > Щелкните Сфера.
В окне СФЕРА назначьте тот же диаметр, что и у цилиндра.
Рядом с «Операция» > «Новое тело».
Нажмите на центр цилиндра, чтобы поместить сферу.
Выберите сферу, перейдите в раскрывающееся меню ИЗМЕНИТЬ > Нажмите «Переместить/Копировать» (сочетание клавиш: M).
Переместите сферу вверх, чтобы выровнять ее с текстом.
Вырезать цилиндр
В БРАУЗЕРЕ разверните Тела > переключите значок глаза сферического тела, чтобы скрыть его.
Выберите верхнюю поверхность цилиндра.
В раскрывающемся меню «СОЗДАТЬ» > нажмите «Выдавливание» (сочетание клавиш: E).
Нажмите стрелку выдавливания вниз, чтобы выполнить операцию «Вырезать».
В окне ВЫДАЧА рядом с Тип экстента > Выбрать ВСЕ.
Нажим Тяга
Нажмите SHIFT на клавиатуре + Щелкните по внутренним граням букв.
На вкладке «Поверхность» в раскрывающемся меню «ИЗМЕНИТЬ» > нажмите «Нажмите и потяните» (сочетание клавиш: Q).
Втяните стрелу в центр сферы.
Смещенная поверхность
Раскрывающееся меню СОЗДАТЬ > Щелкните Смещение.
В окне OFFSET определите глубину тиснения, изменив значение Distance.
Рядом с гранями / поверхностными телами > нажмите «Выбрать».
Выберите сферу > Нажмите OK.
Разделить тело
Раскрывающееся меню ИЗМЕНИТЬ > щелкните Разделить тело.
Выделить все буквы.
В окне РАЗДЕЛИТЬ ТЕЛО инструмент(ы) разделения > щелкните Выбрать.
Выберите сферу.
Нажмите OK.
Текст будет сферически обернут с использованием поверхности смещения.
Затем в раскрывающемся списке БРАУЗЕР > Тела найдите смещенную поверхность сферы, отмеченную оранжевым значком, и все разделенные тела под ней, скройте их, переключив значок глаза, или удалите их навсегда.
Буквы по-прежнему являются отдельными плавающими телами, объедините их со сферой…
Объедините
Выберите все в представлении> перейдите в меню ИЗМЕНИТЬ> нажмите Объединить. В окне ОБЪЕДИНИТЬ нажмите кнопку ОК.
Вот и все. Давайте катимся..
Буквальное катание.
✨ Совет: чтобы узнать, как вращать рендеринг вокруг оси без использования облачных сервисов, ознакомьтесь с этим руководством по 360-градусной вращающейся анимации из 3D-модели.
Похожие сообщения
Как рисовать в Fusion 360
Добро пожаловать в мою коллекцию советов по рисованию в Fusion 360. Я расскажу вам, как рисовать линии и вспомогательные линии, рисовать на изогнутых поверхностях и комбинировать ваши наброски….
Узнайте, как делать наброски в Fusion 360Продолжить
Масштабирование эскизов и моделей в Fusion 360
В Fusion 360 есть два инструмента масштабирования. масштаб эскиза, инструмент для управления…
Изучение масштабных эскизов и моделей в Fusion 360Продолжить
К концу этого видео вы узнаете, как смоделировать поверхность фена в Fusion 360. Прежде чем смотреть это видео, вы должны знать, что это руководство предназначено для пользователей среднего уровня или тех, кто понимать основные функции Fusion 360. Поэтому вам необходимо настроить эталонное изображение в соответствии с приведенными ниже инструкциями.
Эталонное изображение фена
Эталонное изображение фенаЗагрузить изображение
Просмотр технических характеристик фена (Amazon)
Настройка эталонного изображения
После загрузки эталонного изображения (выше) вам нужно вставить изображение и откалибровать его.
Чтобы вставить изображение : выберите раскрывающийся список вставить > холст > выберите исходную плоскость XZ в качестве грани > выберите изображение из локальной папки.
Чтобы откалибровать изображение : откройте папку «Холсты» в браузере Fusion 360 > щелкните изображение правой кнопкой мыши > выберите «Калибровать» > установите первую точку в передней части сушилки > установите вторую точку в задней части сушилка > установите расстояние 150 мм > нажмите клавишу ввода на клавиатуре.
Предварительные условия / требования для этого руководства
Это руководство предназначено для пользователей Fusion 360 среднего уровня или тех, кто понимает следующие функции:
вставка и калибровка эталонного изображения
навигация между контекстными вкладками
базовые знания об ограничениях эскиза
использование окна быстрого доступа
использование меню маркировки (меню, вызываемое правой кнопкой мыши)
вспомогательные плоскости
9 создание геометрии эскиза 90
линии проецирования и пересечения
Начните здесь — начните с поверхности
Расшифровка:
К концу этого видео вы узнаете, как моделировать поверхность феном в Fusion 360. Прежде чем мы начнем, вы должны знать что это руководство предназначено для пользователей среднего уровня или тех, кто понимает основные функции Fusion 360. Поэтому я не буду подробно рассказывать вам о каждой мелочи, например о настройке эталонного изображения.
Вы можете загрузить эталонное изображение и прочитать требования или то, что вам следует знать перед тем, как приступить к работе с этим учебным пособием, по адресу ProductDesignOnline.com/12… это ProductDesignOnline.com/12 [один — два].
В этом уроке я познакомлю вас с некоторыми распространенными методами моделирования поверхностей. Поэтому нам нужно будет использовать инструменты моделирования поверхности.
С этим новым пользовательским интерфейсом панели инструментов вам нужно сначала убедиться, что вы находитесь в рабочей области «Дизайн», которая раньше была рабочей областью моделирования. Затем отсюда мы найдем все инструменты моделирования поверхности на вкладке «Поверхность».
Поскольку этот урок посвящен моделированию поверхности, мы будем работать с внешней поверхностью или внешней кривизной. Я не буду освещать какие-либо внутренние компоненты.
При настройке эталонного изображения нам нужно начать с создания эталонной геометрии, которую мы будем использовать для создания модели поверхности.
Мы собираемся разбить эту модель поверхности на две основные части. Сначала мы обработаем верхнюю часть фена, а затем обработаем ручку фена. Затем я покажу вам несколько вещей, на которые следует обращать внимание при моделировании поверхностей.
Я начну с инструмента «Линия» и выберу плоскость XZ в качестве плоскости для создания эскиза.
Я нарисую первую линию по длине передней части фена. После рисования линии я добавлю размер 43 мм, что является приблизительным диаметром.
Затем я нарисую линию сзади фена. Эта линия будет иметь длину 48 мм.
Далее я собираюсь соединить линии от середины до середины. После создания этой горизонтальной линии я также собираюсь щелкнуть правой кнопкой мыши по линии и добавить к ней горизонтальное ограничение, так как мы будем использовать его в качестве оси вращения чуть позже, поэтому мы хотим убедиться, что эта линия находится на ноль градусов.
Теперь нам нужно создать верхнюю кривизну с помощью инструмента Fit Point Spline.
Мне нравится использовать меню маркировки для доступа к сплайну Fit Point. На некоторых моих уроках для начинающих я использую меню маркировки, щелкая правой кнопкой мыши, а затем медленно показываю вам, где щелкнуть, чтобы вы могли начать запоминать, где находится каждый инструмент. Однако это не является целью меню маркировки. Маркин-меню предназначено для быстрого действия с помощью мыши.
Чтобы быстро использовать меню маркировки, вам нужно будет удерживать правую кнопку мыши, и, удерживая эту правую кнопку, вы захотите перетащить прямо вниз и прямо вправо.
Я сделаю это несколько раз, чтобы показать вам, как это должно выглядеть. Как видите, как только вы привыкнете к расположению команд, меню маркировки станет чрезвычайно полезным при переходе к более сложным концепциям.
Я начну с верхней точки первой линии слева и буду следовать кривизне. Я также собираюсь указать точку, где находится наша линия разделения, где эти две части соединяются.
У вас должно быть только 4 или 5 точек сплайна для этой линии, так как ее кривизна меняется не слишком сильно.
Прежде чем мы создадим поверхность, мы добавим несколько ограничений.
Я удалю все команды с помощью клавиши «escape», а затем выберу первый маркер точки сплайна. Затем я выберу ограничение «Горизонтальное» на панели инструментов. Это гарантирует, что начальная точка сплайна образует угол 90 градусов с этой вертикальной линией… и в самом конце мы смягчим его с помощью инструмента скругления.
На этом этапе, если ваш сплайн не соответствует кривизне эталонного изображения, вы можете потратить несколько минут, чтобы настроить точки сплайна или их маркеры.
Наконец, мы создадим прямую линию для линии разъема. Если вы внимательно посмотрите, то заметите, что эта линия разъема на эталонном изображении не идеально прямая. Он действительно немного изгибается в конце. Однако для простоты я просто создам прямую линию, идущую от верхней точки сплайна вниз к нижней части ручки.
В конечном итоге мы воспользуемся этим для разделения модели, пока что мы можем выбрать линию и превратить ее в вспомогательную линию.
Теперь, когда мы настроили нашу справочную геометрию, мы можем использовать команду вращения. Поскольку мы работали с инструментами эскиза, вы увидите, что мы все еще находимся на контекстной вкладке эскиза.
Нам нужно щелкнуть вкладку «Поверхность», чтобы вернуться к инструментам всплытия. Затем на панели инструментов вы увидите команду вращения «поверхности». Он также находится в раскрывающемся списке создания, если вы настроили панель инструментов.
Я обязательно отменю выбор цепи и выберу верхний сплайн в качестве профиля. Затем я выберу селектор оси, что позволит нам выбрать нашу длинную горизонтальную линию в качестве оси вращения. Вы увидите, что форма нашего профиля вращается вокруг, создавая поверхностное тело. Я удостоверюсь, что операция настроена на «новое тело», а затем нажму «ОК».
Если я открою папку с телами, вы увидите, что у нас есть поверхностное тело, которое обозначено тонким оранжевым значком поверхности.
Вы также увидите, что внутренние поверхности желтые… и это никак не повлияет на вашу модель, это просто для того, чтобы вы знали, что в настоящее время это поверхность и она не имеет реальной толщины.
Очень быстро, если я скрою эталонное изображение, я просто хочу указать, что эта верхняя линия не является фактической линией разъема в модели. Это просто визуальная настройка, которая поможет вам лучше понять контур. Если я изменю визуальный стиль на «затененный», то вы заметите, что линия исчезнет, и наша фигура приобретет красивую гладкую поверхность.
Однако мне нравится настройка «Заштриховано с видимыми краями», особенно при работе с поверхностными моделями, так как она помогает лучше понять кривизну. Я включу это обратно, используя сочетание клавиш управления и числа 6.
Я снова включу эталонное изображение, и давайте теперь посмотрим на наш дескриптор. Наше верхнее тело было довольно просто создать с помощью команды вращения. Для создания ручки мы воспользуемся командой loft, и она потребует немного больше работы из-за ее кривизны.
Опять же, сначала нам нужно создать некоторую геометрию для ссылки.
Я выберу ту же плоскость XZ, что и плоскость для создания эскиза.
Если бы вы держали ручку фена, левая и правая стороны были бы симметричны. У нас также есть эта линия разъема, разделяющая их посередине. Таким образом, эта ручка состоит из четырех разных секций. Нам нужно будет нарисовать только левую и правую части этих сторон, которые находятся ближе всего к нам, а затем мы в конечном итоге отразим их на другой стороне.
Я прослежу, чтобы первоначальный эскиз был включен в Браузере. Это позволит нам использовать команду проекта для проецирования прямой линии разъема. Затем мы будем использовать эту линию в качестве отправной точки для нижней части сплайнов.
Убедившись, что опция построения отключена, я собираюсь нарисовать сплайны для краевых линий ручки. Опять же, я начну с нижней точки и буду продвигаться к вершине.
Как правило, при использовании сплайнов точки нужно размещать только на высоких или низких пиках. Важная вещь с этим сплайном заключается в том, что мы хотим убедиться, что мы выходим за границу поверхности верхней части сушилки, поскольку мы намеренно создадим эту ручку, торчащую через верхнюю часть корпуса. Мы делаем это, чтобы затем обрезать его, что является обычной практикой и концепцией, которую вам необходимо понять, чтобы стать лучше в моделировании поверхностей.
Я также должен отметить, что в этом уроке я не учитывал заднюю волнистую часть сушилки, и что нам не нужно точно имитировать это эталонное изображение.
На этом этапе важно убедиться, что мы находимся над верхней поверхностью тела. Чтобы заставить это, мы могли бы добавить измерение. Я буду использовать инструмент размера эскиза, чтобы добавить размер 20 мм от верхней точки сплайна до средней горизонтальной линии из нашего первого эскиза. Вы увидите, что линия мгновенно станет фиолетовой, поскольку она автоматически проецируется на наш текущий эскиз.
Наконец, я выберу нижнюю точку сплайна и выберу горизонтальное ограничение на панели инструментов. Я хочу, чтобы эта нижняя ручка сплайна имела горизонтальное ограничение, потому что это гарантирует, что у этих частей не будет выемки или странной полости, когда грани сходятся внизу.
Теперь нам нужно повторить эти шаги с другой стороны, а затем я подчищу точки сплайна.
Вы заметите, что, поскольку это учебник среднего уровня, я пытаюсь показать вам, ребята, некоторые рабочие процессы, которые я использую при моделировании продуктов, такие как частое использование окна быстрого доступа или меню маркировки. Во всех моих руководствах для начинающих я стараюсь действительно замедлить работу и часто воздерживаюсь от многих вещей, которые сделают вас более эффективным пользователем Fusion 360.
Теперь, когда я очистил свои сплайны и следуя общей форме эталонных изображений, я могу превратить их в ручки с помощью команды поверхностного лофта.
Но во-первых, если вам пока нравится обучение, нажмите кнопку «Мне нравится»! И будьте честны, если вам это не нравится, нажмите кнопку «не нравится». Если вы хотите увидеть больше учебных пособий среднего уровня, прокомментируйте аббревиатуру «INT» заглавными буквами ниже… и если вы предпочитаете учебные пособия для начинающих, прокомментируйте аббревиатуру «BEG» ниже.
Другой важной концепцией, если вы хотите получить больше информации о моделировании поверхностей, будет использование гребней кривизны. Я выберу один из этих сплайнов, а затем нажму кнопку «гребенка кривизны» в палитре эскизов. Я не буду подробно обсуждать гребенку кривизны в этом уроке, так как это легко может быть самостоятельным уроком. Короче говоря, эта гребенка кривизны поможет вам проверить переходы ваших сплайнов. Вы захотите использовать их, чтобы убедиться, что ваши поверхности абсолютно гладкие и что у вас нет каких-либо странных переходов или небольших изгибов в контуре.
Теперь, когда мы закончили с геометрией сплайна, мы хотим ее выдавить. Я выберу вкладку поверхности, чтобы активировать команду вытягивания поверхности. Вы должны убедиться, что используете эту выдавливание поверхности, а не букву «E» на клавиатуре, так как обычное выдавливание моделирования работает только с закрытыми формами профиля.
Активировав команду вытягивания поверхности, я выберу внешнюю геометрию сплайна и просто потяну от нас синюю одинарную стрелку направления. Меня не беспокоит расстояние, так как я создаю его только для обозначения края… так что 10 или 20 мм вполне достаточно. Затем я нажму «ОК».
Далее нам нужно создать вспомогательную плоскость, совпадающую с нашей линией разъема. Я собираюсь использовать опцию «плоскость под углом» из выпадающего списка построения. Затем я выберу ту прямую линию разъема, которую мы создали. Мы хотим, чтобы это было под углом 0 градусов, чтобы оно разделялось прямо по бокам, поэтому я нажму «ОК».
В качестве дружеского напоминания: рекомендуется переименовывать объекты при их создании. Я не всегда делаю это во время уроков, потому что стараюсь, чтобы они были краткими, но в своей повседневной работе я всегда переименовываю ресурсы по мере их создания.
Теперь мы можем использовать эту вспомогательную плоскость для разделения тела верхней поверхности.
Я буду использовать инструмент «Разделить тело», который находится в раскрывающемся списке «Изменить». Я выберу тело верхней поверхности в качестве тела для разделения. Я выберу вспомогательную плоскость в качестве инструмента разделения и нажму «ОК».
Теперь мы можем скрыть эскиз 1 и вспомогательную плоскость, так как нам не нужно их видеть.
Теперь у нас есть два разных тела для верхней части. Передняя половина и задняя половина.
Я разделил верхнюю поверхность перед тем, как закончить ручку, чтобы наша поверхность была разделена там, где она будет пересекаться с нашей ручкой.
Сейчас я собираюсь создать новый эскиз из вспомогательной плоскости. Мы будем использовать этот эскиз для создания нового сплайна, чтобы определить контур в другом направлении.
Этот сплайн должен будет пройти от нижней части ручки к верхней поверхности, где находится наш разрез.
Если я использую меню маркировки для активации инструмента сплайна, вы увидите, что он не хочет привязываться к нижней части ручки.
Что нам нужно сделать, так это пересечь эту нижнюю линию, чтобы у нас была точка для начала. Я собираюсь активировать инструмент пересечения из окна ярлыков. Затем я выберу линию и конечную точку. Я также собираюсь выделить заднюю часть верхней части нашего фена, чтобы мы могли использовать инструмент пересечения для создания линии, где находится линия разъема. Теперь важно отметить, что мы могли бы использовать инструмент пересечения, не разделяя сначала верхнюю часть тела, однако нам все равно нужно разделить наше тело, поскольку они должны быть двумя разными частями.
У меня выбраны все 3 элемента геометрии, поэтому я нажму кнопку «ОК».
Направлюсь к «задней» стороне модели. Затем я буду использовать меню маркировки, чтобы снова активировать инструмент сплайна. Я нарисую сплайн снизу и замечу, как он теперь привязывается к этой нижней точке.
Поскольку у нас нет эталонного изображения в этом направлении, я просто создам некоторую кривизну, основываясь на том, какой, по моему мнению, должна быть ручка.
Я удостоверюсь, что последняя точка привязывается к верхней линии разделения, где мы создали другое пересечение.
Еще раз, мы хотим убедиться, что добавили ограничение по горизонтали к нижнему маркеру сплайна. Затем я нажимаю клавишу выхода и просто перетаскиваю точки сплайна, пока не буду доволен общей формой.
Теперь, когда у нас есть геометрия эскиза, нам нужно снова использовать выдавливание поверхности. Я выберу вкладку «Поверхность», а затем команду «Выдавливание». Еще раз, я вытяну этот сплайн от нас на случайное расстояние, так как мы собираемся использовать это ребро в качестве ссылки, чтобы определить нашу фактическую ручку всего через минуту.
Есть еще одна вещь, которую нам нужно сделать, прежде чем мы сможем использовать команду loft. Нам нужно создать изогнутую опорную линию, которая соединяется с этим краем с другим краем. Для этого я создам сплайн на плоскости XY.
После создания эскиза нам сначала нужно использовать инструмент пересечения, чтобы мы могли начать и закончить сплайн, соединяющий каждое ребро.
Я активирую инструмент пересечения из окна ярлыков. Затем я собираюсь просто выбрать обе эти экструзии поверхности, прежде чем нажать «ОК».
Вы увидите, что теперь у нас есть фиолетовые пересекающиеся линии и точки, на которые мы можем ссылаться. Я буду использовать меню маркировки, чтобы активировать инструмент сплайна. Тогда я просто соединю точки.
Чтобы убедиться, что этот сплайн имеет хорошую кривизну, мы должны применить касательные ограничения к сплайнам и пересечениям.
Удерживая клавишу Shift, я выберу и сплайн, и одну из пересекающихся линий. Затем я нажму на касательную зависимость на панели инструментов. Затем, когда ограничение по касательной все еще активно, я могу просто щелкнуть две другие линии. Вы увидите, что теперь у нас есть ограничение, примененное к обоим концам сплайна, заставляющее его оставаться касательным. Мы также можем настроить ручки сплайна, если нам нужно.
Теперь мы можем использовать команду поверхностного лофта. Я выберу вкладку «Поверхность», а затем найду команду «Лофт» в раскрывающемся списке «Создать». В противном случае, если вы воспользуетесь полем быстрого доступа, вы увидите, что оранжевый цвет будет отличать поверхностный лофт от твердого лофта.
Первое, что нам нужно сделать, это перепроверить, что опция «выбор цепочки» не отмечена. Это гарантирует, что мы не выберем всю ненужную геометрию, которая касается наших профилей ручки.
Я выберу край на правой поверхности. Затем, чтобы выбрать другое ребро, мы можем нажать кнопку «новый ввод», что сэкономит вам немного времени в пути, поскольку вам не нужно выбирать кнопку «Добавить новый выбор» в диалоговом окне. После выбора другого ребра нам нужно выбрать селектор «рельсы» и выбрать только что созданный горизонтальный сплайн.
Прежде чем нажать «ОК», мы хотим изменить подключение нашего профиля. Я выберу раскрывающийся список и выберу опцию «Кривизна» для обоих из них. Это лишь немного изменит его, но сгладит эту кривизну на соединениях. Наконец, давайте нажмем «ОК».
Теперь вы можете заметить, что эта поверхность желтая снаружи, так как она перевернута. Это никак не влияет на модель, кроме ее внешнего вида. Когда вы создаете модели поверхности, вы время от времени сталкиваетесь с этим, когда поверхность кажется вывернутой наизнанку. Мы можем легко изменить это, используя команду «обратить нормаль» из раскрывающегося списка «Изменить». Просто выберите лицо и нажмите «ОК». Вы увидите, что лицо теперь выглядит как другие.
Теперь, когда мы закончили с обратной стороной рукояти, нам просто нужно создать переднюю часть, так как мы зеркально отразим их обе на другой стороне.
Я выберу эту переднюю поверхность и скрою ее с помощью сочетания клавиш.
Нам нужно будет выполнить те же действия, что и раньше. Я создам эскиз на плоскости XY.
Я пересеку две смежные грани.
Затем я создам сплайн и добавлю касательные ограничения к обоим концам сплайна.
Снова воспользуемся инструментом Surface Loft. Выберите оба ребра в качестве профилей и горизонтальный шлиец в качестве направляющей. И изменю типы соединения на «Кривизна (G2).
Если ваша поверхность вывернута наизнанку, то мы можем использовать обратную нормаль, чтобы перевернуть и эту.
На этом этапе мы можем скрыть эталонное изображение и любые другие эскизы или плоскости, которые нам не нужны.
Мы также хотим скрыть тело с другой стороны, так как это нужно нам только для справки.
Теперь нам нужно сшить две поверхности ручки вместе. Я выберу стежок на панели инструментов. Выберите обе половины, и я нажму «ОК».
Теперь мы можем использовать команду зеркала в раскрывающемся списке создания. Я установлю тип узора на вариант «тела», чтобы мы могли выбрать все сшитое тело. Затем мы выберем «зеркальную» плоскость или исходную плоскость YZ, прежде чем нажать «ОК».
Теперь нам нужно сшить вместе две половинки ручек, чтобы мы могли использовать их с инструментом обрезки, чтобы обрезать лишние части, торчащие сверху.
Я выберу оба тела в браузере. Выберите стежок. Затем я нажму «ОК».
Наконец, нам нужно сшить вместе два верхних тела.
Теперь мы можем выбрать «обрезать» на панели инструментов. Во-первых, мы выберем ручку, которую мы только что сшили. Затем нам нужно выбрать внутреннюю область вращения. Процесс выбора может быть немного запутанным, так как не всегда ясно, что вы обрезаете, поэтому вам, возможно, придется отменить и повторить попытку, если вы выберете неправильную вещь.
После нажатия «ОК» вы увидите, скрою ли я ручку, что край был обрезан или вырезан из вращения.
Теперь нам нужно обрезать торчащие верхние части.
Я повторю обрезку и на этот раз сделаю вращающийся корпус инструментом обрезки.
Я выберу две внутренние части в качестве области для обрезки, и вы увидите, что они красного цвета, что показывает, какие части будут обрезаны.
Если я нажму «ОК», вы увидите, что части поверхности теперь обрезаны.
Наконец, нам нужно пришить ручку к верхней части корпуса, чтобы у нас была только одна поверхность.
Теперь воспользуемся командой «утолщение», чтобы превратить эту единственную поверхность в твердотельную модель. Я создам внутреннюю толщину 3 мм.
После создания толщины мы можем снова использовать инструмент «Разделить тело», чтобы разделить это тело на две половины по линии разъема. Я буду использовать ту же вспомогательную плоскость, которую мы использовали для инструмента разделения.
Теперь у нас есть два отдельных твердых тела, которые мы можем переименовать в Браузере.
На этом этапе мы хотим проверить наш предварительный анализ, чтобы увидеть, как эта модель выйдет из шаблона, и нужно ли нам изменять какие-либо области.
При активном инструменте «Анализ уклона» я выберу оба тела. Затем для направления мы выберем ось «Y», так как они будут выходить из формы справа налево.
Сразу же вы увидите, что у нас есть несколько красных проблемных областей. Однако мы также можем уменьшить угол уклона. Угол уклона зависит от того, как это будет изготовлено, но если бы эти оболочки были отлиты под давлением, то мы могли бы получить угол всего 0,5 мм.
После уменьшения угла наклона вы увидите, что у нас есть красный цвет на передней части, об этом мы можем позаботиться с помощью команды скругления.
У нас также есть проблемы здесь, на задней части, а также здесь, на ручке. Это то, что нам может понадобиться для настройки контура задней части, чтобы вершина кривой была той же точкой, что и наша линия разъема. Для ручки нам, вероятно, потребуется увеличить ширину в ее центральной точке.
Я собираюсь добавить скругление 1 или 1,5 мм к переднему и заднему краям. Если я снова включу анализ, вы увидите, что он позаботится о главной проблеме.
Точная настройка геометрии поверхности имеет решающее значение при изготовлении пластиковых деталей, особенно если вы хотите избежать проблем при производстве. В конечном счете, вы захотите изменить свою модель поверхности до тех пор, пока в анализе уклона почти не останется признаков красного.
Последнее, что я хочу кратко обсудить, это важность создания «открытия» с помощью линии разъема. Если вы посмотрите на пульт от телевизора или любой другой предмет, состоящий из двух пластиковых половинок, вы заметите, что швы не совпадают, а вплотную прилегают друг к другу на одной и той же поверхности. Вместо этого создается зазор в месте сопряжения деталей, что помогает избежать неровностей на краях пластика.
Чтобы создать врезку, вам нужно создать серию смещений, сшить их вместе, а затем отрезать от края твердого тела.
Еще два полезных инструмента, которые вы захотите использовать при работе с поверхностными телами, — это инструмент анализа зебры и инструмент анализа кривизны.
Если я применю анализ зебры, вы увидите, что полосы помогают нам лучше понять непрерывность всей модели.
Обычно вам нужно изменить направление, чтобы увидеть разные части модели. Вы увидите, что горизонтальные полосы лучше всего подходят для верхней части модели; тогда как вертикальные полосы лучше всего подходят для ручки. Обратите внимание, что на ручке есть странные полосы в месте соединения с верхней частью. В идеале полосы шли бы от одной части к другой без этих неудобных точек разрыва. Мы хотели бы вернуться к этому переходу и улучшить его, изменив наши первоначальные сплайны.
Анализ кривизны работает аналогично, за исключением того, что он использует цвет, чтобы помочь оценить высокие и низкие области. Что мы хотим видеть, так это плавные переходы, которые мы видим вверху. Опять же, мы видим, что для создания более плавного перехода для этой геометрии потребуется дополнительная работа с ручкой.
Подводя итог этому руководству, мы обсудили несколько ключевых концепций моделирования поверхностей. Во-первых, с помощью инструментов поверхности вы можете определить внешнюю геометрию модели. Инструменты стежка и обрезки — это часто используемые функции, которые вы захотите освоить по мере знакомства с моделированием поверхностей.
При работе с геометрией поверхности важно использовать инструменты анализа, чтобы следить за кривизной и непрерывностью. Вы должны иметь в виду, где деталь будет разделена пополам линией разъема, как будет работать раскрытие и какие области могут потребовать радиуса скругления или некоторой настройки, чтобы деталь прошла анализ черновика.
Инспекционная камера Bosch UniversalInspect 0. 603.687.000 предназначена для инспектирования труднодоступных и слабоосвещенных мест. Головка и кабель камеры имеют защиту класса IP67, поэтому выдерживают временное погружение в воду и защищены от пыли. Предусмотрен режим съемки с черно-белым контрастом для поверхностей с высокими отражающими свойствами, например воды. Комплектуется дополнительными принадлежностями, расширяющих функционал прибора: крюком, магнитом и зеркалом. Для удобства хранения и транспортировки камера поставляется в чехле.
Характеристики
Внесен в госреестрнет
Элементы питанияAA
Передача изображения на ПКmicroSD-карта
Разрешение, пикс320×240
org/PropertyValue»>Количество и напряжение элементов питания2х1.5B
Диаметр камеры, мм8
Размер дисплея, дюйм2.31
Длина зонда, м0.95
Min радиус изгиба, мм30
Степень защитыIP67
Габариты, мм161х70х41
Количество аккумуляторов в комплекте4
org/PropertyValue»>Возможность работы со смартфономнет
Время работы на одном заряде, ч4
Рабочая температура, град.-10…+50
Вес, кг0.39
Напишите свой отзыв о «Инспекционная камера Bosch UniversalInspect 0.603.687.000»
Имя / Псевдоним
Плюсы
Минусы
Комментарий
Оценка товара
Нажимая на кнопку я соглашаюсь с политикой обработки моих персональных данных
UniversalInspect, Видеокамера с ЖК дисплеем (Видеоскоп, Эндоскоп), Bosch
* Изображения служат только для ознакомления, см. техническую документацию
410 BYN
360 BYN
от 2 шт. —
348 BYN
Добавить в корзину 1 шт.
на сумму 360 BYN
Номенклатурный номер: 9000481412
Артикул: UniversalInspect
PartNumber: 0603687000
Страна происхождения: КИТАЙ
Бренд / Производитель: Bosch
Описание
Bosch Universal Inspect — первая инспекционная камера от Bosch для домашних мастеров! Благодаря простоте и компактности отлично подходит для использования в быту: осмотр трубопровода, гипсокартонной конструкции, водосточного желоба, различных бытовых приборов или мебели.
Измеряйте и фиксируйте Картинка с камеры выводится на цветной дисплей разрешением 320х240 пикселей. В памяти можно сохранить 8 снимков, например, если вы обнаружили проблему и хотите показать результат специалистам. Есть функция поворота снимка на 180°. Память можно увеличить, если установить дополнительно карту MicroSD.
Максимум возможностей у вас на ладони
∙ Класс IP67 Дает возможность погружать кабель с камерой в воду без риска повреждения электрокомпонентов
∙ Компактный корпус Легко помещается на ладони, так как имеет размеры всего 161х70х41 мм и вес в 390 г
∙ Контрастный режим Показывает черно-белую картинку для работы с отражающими поверхностями, например, гладким металлом и водой
∙ Намотка кабеля Осуществляется по периметру корпуса и обеспечивает компактное хранение без риска повреждения
∙ Понятное управление Помогает выбрать нужный режим, поворачивать, сохранять и просматривать фотографии
∙ Широкий диапазон температур Составляет от -10 до +50 °С, поэтому можно работать на улице и вблизи нагретых объектов
Источник питания батарейки Передача изображения на ПК microSD-карта Диаметр камеры, мм 8 Трехступенчатый зум (0-1.5-2) Трехступенчатая подсветка 0% — 50% — 100% Длина зонда, м 0. 95 Степень защиты IP67 Возможность работы со смартфоном нет Время работы на одном заряде, ч 4 Рабочая температура, град. -10…+50 Разрешение, пикс 320×240 Размер дисплея, дюйм 2.31 Min радиус изгиба, мм 30 Количество аккумуляторов в комплекте 4 Напряжение питания, В 1.5 Количество батареек, шт. 4 Габариты, мм 161х70х41 Вес, кг 0.39
15AUP(A316/LR6/AA)4, Элемент питания алкалиновый Ultra Plus (4шт) 1. 5В
9.20 BYN
Basic LR6 (MN1500/А316/AA)4, Элемент питания алкалиновый (4шт) 1.5В
12.50 BYN
Ultra LR6 (MX1500/А316/AA)4, Элемент питания алкалиновый (4шт) 1.5В
15.50 BYN
Подставки для паяльников, кронштейны и крепления для паяльных станций
Измерители температуры и влажности комбинированные
Монтажные лупы
Газовые паяльники и горелки
Пинцеты
Беспроводная камера для осмотра GIC 120
Беспроводная камера для осмотра GIC 120 | Бош Профессионал
Камеры для досмотра
Беспроводная камера для досмотра
Функции и основные характеристики
Ваш выбор
с 4 батареями (AA), кабелем для камеры
Показать вариант
87,00 KWD
Рекомендованная розничная цена без НДС
Найти местного дилера
Инспекционные камеры
GIC 120
Подробные цены
Кабель камеры для GIC 120 C, диаметр 8,5 мм, длина 120 см
Крючок, магнит, зеркало
4 батарейки 1,5 В LR6 (AA)
Номер заказа: 0601241100
87,00 KWD
Рекомендованная розничная цена без НДС.
Ваш выбранный вариант
Ваш выбранный вариант
с 4 батареями (AA), кабелем камеры
0 601 241 100
87,00 кувейтских динаров
Рекомендованная розничная цена без НДС
Найти местного дилера
GIC 120 Professional
Ваш выбор
с 4 батареями (AA), кабелем камеры
Номер для заказа: 0 601 241 100
Выберите вариант
87,00 KWD
Рекомендованная розничная цена без НДС
Найти местного дилера
GIC 120
Подробные цены
Кабель камеры для GIC 120 C, диаметр 8,5 мм, длина 120 см
Крючок, магнит, зеркало
4 батарейки 1,5 В LR6 (AA)
Номер заказа: 0601241100
87,00
Рекомендованная розничная цена без НДС.
Этот продукт включает
Кабель камеры для GIC 120 C, диаметр 8,5 мм, длина 120 см 1 600 A00 9B9
Крючок, магнит, зеркало
4 батарейки 1,5 В LR6 (AA)
Показать меньше
Показать больше
Дополнительные данные
Размер дисплея
2,7 »
Разрешение экрана
320 х 240 пикселей
Диаметр головки камеры
8,5 мм
Длина кабеля камеры
120 см
Количество ступеней светодиодного освещения
3
Масса
0,5 кг
GIC 120 Professional: Дополнительная информация
Особенности продукта
Инспекционная камера GIC 120 Professional представляет собой компактный инструмент для быстрого и простого осмотра. Оснащенный функцией Compass View, он предлагает четкую пространственную ориентацию. Кроме того, технология Quick Connector позволяет пользователю быстро и легко менять кабель камеры, а также обеспечивает организованное хранение инструмента. Компактный дизайн с улучшенной эргономикой обеспечивает наилучшее управление в любой возможной ситуации, даже в необычных положениях.
Оборудование и применение
Он подходит для многих применений, таких как осмотр внутренних коробок и труб, за стенными полостями, а также для гидравлических систем и автомобильных приложений.
Дополнительная информация
Для лучшего распознавания деталей в GIC 120 Professional предусмотрена удобная функция цифрового масштабирования. Кроме того, кабель камеры длиной 120 см с прикрепленной яркой светодиодной подсветкой обеспечивает достаточный доступ в узкие пространства и освещает темные области для четкого обзора.
Для того, чтобы страница отображалась оптимально, ее необходимо перезагрузить. Пожалуйста, нажмите кнопку ниже, чтобы перезагрузить страницу.
Перезагрузить сейчас
Bosch Professional GIC 120 C – Измеритель
MeasuritecГлавная
Bosch Professional GIC 120 C — Инспекционная камера (длина кабеля 120 см, дисплей: 3,5’’, 4 батарейки AA, в коробке)
Bosch Professional GIC 120 C — Инспекционная камера (длина кабеля 120 см, дисплей: 3,5’’, 4 батарейки AA, в коробке)
Bosch Professional GIC 120 C — Инспекционная камера (длина кабеля 120 см, дисплей: 3,5’’, 4 батарейки AA, в коробке)
Описание
Марка: Bosch Professional
Обвязка: Инструмент
Профессиональная инспекционная камера, предназначенная для осмотра и документирования труднодоступных мест. Большой 3½-дюймовый дисплей для полного обзора. Беспроводная инспекционная камера Bosch GIC 120 C Professional — это компактный инструмент для быстрого и простого осмотра. Удобный осмотр и документирование труднодоступных мест. Функция Up is Up предлагает оптимальная ориентация пользователя благодаря автоматическому повороту изображения Передача изображений и видео напрямую через кабель micro USB или карту micro SD для документирования важных областей
Изображения и видео можно сохранять на карту micro SD и передавать через micro USB для удобного документирования. Кабель камеры длиной 1,2 м с узкой головкой камеры диаметром 8,5 мм обеспечивает легкий доступ к труднодоступным местам для осмотра. Быстроразъемный разъем для легкого снятия головки камеры и компактного хранения. Яркий светодиодный рабочий фонарь обеспечивает освещение в темноте. Может питаться от перезаряжаемой литий-ионной батареи емкостью 1,5 Ач или от 4 батареек типа АА. Поставляется со вкладышем L-Boxx.
Преимущества
Эффективный осмотр и документирование труднодоступных мест.
Для оптимальной ориентации в пространстве функция «Вверх есть вверх»™ поворачивает и одновременно выравнивает изображение на большом экране
Непосредственная передача изображений и видео через USB-кабель для быстрого сохранения высококачественной документации критических областей
Технология Dual Power Source позволяет использовать литий-ионную батарею 12 В или стандартные щелочные батареи
Области применения
Камера эндоскопа идеально подходит для многих применений в мастерских, таких как осмотр внутренних коробок и труб, полостей за стенами, а также для гидравлических систем и автомобилей.
Компактность
GIC 120 C Professional поставляется с технологией Quick Connector, которая позволяет быстро и легко менять кабель камеры, а также обеспечивает организованное хранение инструмента. Его компактный дизайн с идеальной эргономикой обеспечивает наилучшее управление в любой возможной ситуации. Кроме того, кабель камеры длиной 120 см с прикрепленной яркой светодиодной подсветкой обеспечивает достаточный доступ в узкие пространства и освещает темные области для четкого обзора.
ДЛЯ ТРУДНОДОСТУПНЫХ МЕСТ Инспекционная камера GIC 120 C имеет кабель камеры длиной 120 см и толщиной 8,5 мм со светодиодной подсветкой для удобного освещения, осмотра и документирования даже труднодоступных мест. Изображения и видео можно удобно передавать с помощью кабеля micro USB или карты micro SD. ЗНАТЬ, ГДЕ ВЕРХ Функция «Верх вверху» автоматически поворачивает дисплей для лучшей ориентации, чтобы пользователь знал, где находится верх. ПРОСТАЯ ПЕРЕДАЧА ДАННЫХ Передача изображений и видео через кабель micro USB или карту micro SD для быстрого и удобного документирования и хранения данных. ДВОЙНОЙ ИСТОЧНИК ПИТАНИЯ Для большей гибкости эндоскоп можно использовать с литий-ионной батареей 12 В или с батареями AA через адаптер для батареи. КОМПЛЕКТ ПОСТАВКИ Инспекционная камера, GIC 120 C, 4 батарейки AA, адаптер для батареи, кабель камеры, крючок, магнит, зеркало, кабель micro USB, карта памяти micro SD на 4 ГБ. ГИБКОСТЬ И ХРАНЕНИЕ Кабель камеры предлагает оптимальный компромисс между жесткостью и гибкостью, облегчая прокладку. Технология Quick Connector позволяет легко отсоединять кабель камеры для удобного хранения эндоскопа. Для большей гибкости камеру эндоскопа можно использовать либо с литий-ионной батареей 12 В, либо с обычными батареями AA через адаптер для батареи.
Функции
Особенности
Технология Quick Connector для быстрой и простой замены кабеля камеры и компактного хранения инструмента
Компактный корпус с улучшенной эргономикой для оптимального использования в любых ситуациях
3 этапа светодиодного освещения
Цифровой зум для лучшего распознавания деталей
Кабель камеры длиной 120 см для лучшего доступа к проблемным зонам
Может работать как с литий-ионной батареей 10,8 В, так и со стандартными щелочными батареями
Головка камеры 8,5 мм с 1 светодиодной подсветкой
1,2-метровый съемный гибкий шейный зонд с изолированной камерой
Цветной ЖК-экран 3½ дюйма
320 x 240 пикселей Разрешение
Батарейки типа АА, 4 шт. в комплекте
5 часов Время работы
Просмотр в реальном времени
Встроенный слот для карт памяти MicroSD
Технические характеристики
Напряжение: 12 В
Размер дисплея: 3,5 дюйма
Количество ступеней светодиодного освещения: 3
Разрешение экрана: 320 x 240 пикселей
Диаметр головки камеры: 8,5 мм
Длина кабеля камеры: 1200 мм
Вес: 0,64 кг
Комплект поставки
1 батарея LR6 1,5 В (AA)
Карта MicroSD 4 ГБ
Кабель камеры для GIC 120 C, диаметр 8,5 мм, длина 120 см
Крючок, магнит и зеркало
Вставка L-BOXX
Кабель микро-USB
Детали
688px;»> Разрешение экрана
320 x 240 пикс.
Напряжение аккумулятора
12 В
Размер дисплея
3,5 дюйма
Диаметр головки камеры
8,5 мм
Длина кабеля камеры
120 см
Количество ступеней светодиодного освещения
3
Вес
0,64 кг
Марка: Bosch Professional
Обвязка: Инструмент
Профессиональная инспекционная камера, предназначенная для осмотра и документирования труднодоступных мест. Большой 3½-дюймовый дисплей для полного обзора. Беспроводная инспекционная камера Bosch GIC 120 C Professional — это компактный инструмент для быстрого и простого осмотра. Удобный осмотр и документирование труднодоступных мест. Функция Up is Up предлагает оптимальная ориентация пользователя благодаря автоматическому повороту изображения Передача изображений и видео напрямую через кабель micro USB или карту micro SD для документирования важных областей
Изображения и видео можно сохранять на карту micro SD и передавать через micro USB для удобного документирования. Кабель камеры длиной 1,2 м с узкой головкой камеры диаметром 8,5 мм обеспечивает легкий доступ к труднодоступным местам для осмотра. Быстроразъемный разъем для легкого снятия головки камеры и компактного хранения. Яркий светодиодный рабочий фонарь обеспечивает освещение в темноте. Может питаться от перезаряжаемой литий-ионной батареи емкостью 1,5 Ач или от 4 батареек типа АА. Поставляется со вкладышем L-Boxx.
Преимущества
Эффективный осмотр и документирование труднодоступных мест.
Для оптимальной ориентации в пространстве функция «Вверх есть вверх»™ поворачивает и одновременно выравнивает изображение на большом экране
Непосредственная передача изображений и видео через USB-кабель для быстрого сохранения высококачественной документации критических областей
Технология Dual Power Source позволяет использовать литий-ионную батарею 12 В или стандартные щелочные батареи
Области применения
Камера эндоскопа идеально подходит для многих применений в мастерских, таких как осмотр внутренних коробок и труб, полостей за стенами, а также для гидравлических систем и автомобилей.
Компактность
GIC 120 C Professional поставляется с технологией Quick Connector, которая позволяет быстро и легко менять кабель камеры, а также обеспечивает организованное хранение инструмента. Его компактный дизайн с идеальной эргономикой обеспечивает наилучшее управление в любой возможной ситуации. Кроме того, кабель камеры длиной 120 см с прикрепленной яркой светодиодной подсветкой обеспечивает достаточный доступ в узкие пространства и освещает темные области для четкого обзора.
ДЛЯ ТРУДНОДОСТУПНЫХ МЕСТ Инспекционная камера GIC 120 C имеет кабель камеры длиной 120 см и толщиной 8,5 мм со светодиодной подсветкой для удобного освещения, осмотра и документирования даже труднодоступных мест. Изображения и видео можно удобно передавать с помощью кабеля micro USB или карты micro SD. ЗНАТЬ, ГДЕ ВЕРХ Функция «Верх вверху» автоматически поворачивает дисплей для лучшей ориентации, чтобы пользователь знал, где находится верх. ПРОСТАЯ ПЕРЕДАЧА ДАННЫХ Передача изображений и видео через кабель micro USB или карту micro SD для быстрого и удобного документирования и хранения данных. ДВОЙНОЙ ИСТОЧНИК ПИТАНИЯ Для большей гибкости эндоскоп можно использовать с литий-ионной батареей 12 В или с батареями AA через адаптер для батареи. КОМПЛЕКТ ПОСТАВКИ Инспекционная камера, GIC 120 C, 4 батарейки AA, адаптер для батареи, кабель камеры, крючок, магнит, зеркало, кабель micro USB, карта памяти micro SD на 4 ГБ. ГИБКОСТЬ И ХРАНЕНИЕ Кабель камеры предлагает оптимальный компромисс между жесткостью и гибкостью, облегчая прокладку. Технология Quick Connector позволяет легко отсоединять кабель камеры для удобного хранения эндоскопа. Для большей гибкости камеру эндоскопа можно использовать либо с литий-ионной батареей 12 В, либо с обычными батареями AA через адаптер для батареи.
Функции
Особенности
Технология Quick Connector для быстрой и простой замены кабеля камеры и компактного хранения инструмента
Компактный корпус с улучшенной эргономикой для оптимального использования в любых ситуациях
3 этапа светодиодного освещения
Цифровой зум для лучшего распознавания деталей
Кабель камеры длиной 120 см для лучшего доступа к проблемным зонам
Может работать как с литий-ионной батареей 10,8 В, так и со стандартными щелочными батареями
Головка камеры 8,5 мм с 1 светодиодной подсветкой
1,2-метровый съемный гибкий шейный зонд с изолированной камерой
Цветной ЖК-экран 3½ дюйма
320 x 240 пикселей Разрешение
Батарейки типа АА, 4 шт. в комплекте
5 часов Время работы
Просмотр в реальном времени
Встроенный слот для карт памяти MicroSD
Технические характеристики
Напряжение: 12 В
Размер дисплея: 3,5 дюйма
Количество ступеней светодиодного освещения: 3
Разрешение экрана: 320 x 240 пикселей
Диаметр головки камеры: 8,5 мм
Длина кабеля камеры: 1200 мм
Вес: 0,64 кг
Комплект поставки
1 батарея LR6 1,5 В (AA)
Карта MicroSD 4 ГБ
Кабель камеры для GIC 120 C, диаметр 8,5 мм, длина 120 см
Изготовлена из водонепрониуаемого высококачественного полиэстера 1680D Оксфорд
Длина пояса 130 см
Прочный двухрядный пояс с мощной металлической пряжкой и металлической окантовкой отверстий
Сумки закреплены на поясе металлическими заклепками
Полезный размер сумки: 280х200 мм
4 наружных кармана и металлическая петля для подвешивания молотка на каждой сумке
Одно внутреннее отделение
Металлические заклепки в местах наивысшей нагрузки на сумке
Вес: 0. 50 кг
Эксплуатационные характеристики (лет)
Гарантийный срок хранения2
Гарантийный срок эксплуатации0.1
Срок службы3
Упаковка
SKU
товарные позиции
кол-во в упаковке
тип упаковки
штрих-код EAN-13
длина (см)
ширина (см)
высота (см)
вес брутто (кг)
объем упак. (куб.м)
66146
С-12 (КВТ)
1
п/э пакет
4670016353016
28
28
10
0.9
0.00784
Характеристики
SKU
товарные позиции
Тип изделия
Материал
66146
С-12 (КВТ)
сумка поясная
полиэстер 1680D Оксфорд
Kw vrečko zp001 (kw) 75910 \ Города
jpeg»>
В кошарико
Подобные изделия
Мультивеликость Heksagonalna Zakonsko koncu Vijak Tapnite Extractor Jekla Zdrobljen Glavo Pipe Odstranjevalec Izloča Nastavite Vijak Odstranite Orodja v Kombinaciji Vrata
Opis: 100% čisto nov in visoko kakovostnih Značilnosti: Vstavite extractor v tapnite režo iste specifikacije.Ne poškoduje končal svilenih površino, delovanje je lažje in učinkovito.Zavrtite ročico ročico v nasprotni smeri urnega kazalca (traja levo, tapnite in zavrtite v smeri урига казалца), да одстраните тапните в дело. Спецификация: Наконечник: экстрактор Vijak Tapnite Материал: ковина Применение: Vijak Tapnite Zdrobljen
8,81 €
11,30 €
Orodje 15шт Diamantno orodje, Набор коронок для сверления за стекло для Moč home delo Lesnoobdelovalnih Ročno Orodje#sw keramike, marmorja 6-50мм Значение: Николи не опорабляйте вайе, медтем ко строй йе в удара.
Luknje ne zahtevajo nadaljnje delo, kot je rezanje je čista. Барва: Kot kažejo slike Набор алмазных свечей отличается от стекла, керамики, мрамора толщиной 6–50 мм. Prosimo, dodajte vodo za hladilne tekočine in vaja počasi. Зачели
5,24 €
7,60 €
Večfunkcijsko Orodje Zapestnica Tekalne Plasti Zapestnica Iz Nerjavečega Jekla, Vijačne Voznik Orodja Complet Prijazno Nosljivi Kolo Multitool Prostem Orodje
Значения: 1. Vsak oddelek jekla verige je enaka orodja, vključno z izvijačem, lahko odpirač, odpirač za steklenice, odpirač, imbus ključ. 2. Лахко наключно здружити все 29jeklene verige za različne funkcije, ali zmanjšanje nekaterih oddelkih za zapestnico. 3. 29 различных ородов в 10 повезав лакко сеставлени веч начинов, да прилагодите та мульти-ородье за ваше потребление. 4. Изделана из
14,23 €
20,05 €
FIXFANS 2Pcs Težka Močan Sealni LCD Заслон Одежды Ородья для iPhone, iPad iMac MacBook Заслон Страниток Ородья за Поправило Kit
2Pcs Težka Sesalni LCD Заслону на Dotik Odpiranje Orodje для iPhone, iPad iMac Orodja za Popravilo Ima Strokovno težka sesalno pokal. Izdelana iz trpežne ABS plastike in silikona.Ki se uporabljajo za odstranjevanje telefon in tablični računalnik steklene plošče.Uporabljate lahko dve kos dvignite zaslon stekla off aluminija so iMacs, mora imeti orodje za popravilo ali zamenjavo zdrobljen, počeno ali zdrobljeno iMac заслонку. Спецификация
3,10 €
3,88 €
Равно ключ Автомобиль Дент Одстранитев дент Поправило Точе дент краль палико Кавлем комплект
Веч слогов веч концессий Равно ключ Автомобиль Дент Странитев PDR Поправило Toče PDR край палико Kavljem completi Равно Кавел материал: помлад джекла 1 превечное поле из большого комплекта
244,62 €
359,74 €
15 великости Силиконско-теснило Просойни 225шт. кольцо MVQ или обручи Точка Избор Комплект из Поле Home Orodja
7,58 €
8,91 €
46pcs Vtičnico Ključa Orodja Ključ za Ročno Orodje Set kljuă Vtičnico Klešče, Garaža Orodja Avto Wrenchs Univerzalno Ragljo Popravilo Avtomobila
1PC Wk — 400 Prenosno Hladilno sredstvo Cevi za Hidravlično Orodje za razširjanje & Izgorevanju Instrument Bakrenih Cevi za Hidravlične Cevi Orodje za razširjanje Set
1PC Wk — 400 Prenosno Hladilno sredstvo Cevi za Hidravlično Orodje za razširjanje & Žgočim Инструмент Bakrenih Cevi Za Hidravlične Cevi Orodje Za Razširjanje Set Приказ: Опомба: Če vaš območje jeddaljeno območje, boste мораль dodati ločeno plačilo. Obvestilo: ko je pošiljka prispela na vaše navade, prosimo, plačati davek in pick up посылки, нисмо одговорни за все каринске
106,60 €
119,78 €
Aluminijeve Zlitine T-track Režo Mitre Skladbo Šablona Stalnica T-Reže In Skladbo Stop za Mizarja Priročniku Usmerjevalnika Tabela Lesnoobdelovalnih Orodja
Nakup Povezavo Mitre Drsnik Tabela Videl Mitre Merilnik Palico Спецификация: Материал: алюминий zlitine 6061 Совет: Mitre skladbo stop/ T-reža miter progi Барва: Чрна За: Т-Режо, Т-Следи Великость: Kot slika prikazuje Пакет Je Включено: 1 х Mitre skladbo stop ali 1 T-Sledi Опомба: 1. Prosimo, довольствуйтесь 1-3см напак zaradi ročnega merjenja.Prosimo, poskrbite,
5,85 €
10,27 €
43 v 1 IC, Čip Odstranite Orodja CPU NAND Odstranite Rezilo Komplet za iPhone Popravilo matične plošče CPU Lepilo Odstranjevanje Čiščenje Orodja Komplet
43 V 1 telefon motherboard razstaviti rezilo komplet za iPhone PCB BGA čipa burin Hujše strgalo za iPhone A8 A9 A10 A11 BGA Čipa orodje za поправило kit se uporablja za CPU rezilo chip odstranite lepilo, Specialied za iphone поправило orodje za rob gume, lepila rezilo Значение: 43 В 1 нояб. слог для iPhone, ipad разставить чипсет 43 rezila nastavite z visoko žilavost jekla material in rezila 43в1
Opis Velikost: 3 Cm/6 inch Material: Ogljikovo Jeklo Površinska Obdelava: Toplotna obdelava Штевиль: Двери Кремля Uporabe: Стройне опреме, Orodja DIY Материал: Industrija Упаковка: Vrečko is_customized: Ne Značilnosti: — Изделан из высоко-огликовега jekla, ki je bil uporabljen, da bi težko za proizvodnjo jekla. — Lahko се obrne од центра Рама, себе бодо kmalu lahko dotik дело центр je potegnil. —
6,84 €
9,90 €
ALLOET 21Pcs Krog Mehanske Udarec Nastavite Jeklo Pin Kladivo Plastičnih Udarcev Z Medenina, Usnje Tiskarstvo Tools Ročno Orodje Set Toolbox
Функция: Chrome-platirani jekleno kladivo с sesalno površino, najlon in bronasto glavo, da se zagotovi podjetje, ampak ne-škodljivo stik med uporabo. Brabrass8 ударов 8 игло ролик ударцев, включно z 1/8, 9/64, 5/32, 3/16 7/32, 1/4, 9/32 в 5/16, из медине, за површине, ки се лахко пошкодуеджо з еклено ударцев. Votlo-out koncu, 4pcs votlih-out koncu starter kit, ki je sestavljen iz 1/8 palca, 5/32
105082, г. Москва, Рубцовская набережная, д. 3, стр. 1, эт. 1, пом. I, к. 31, оф. 11
Показать на карте
ОГРН
1057749283206
ИНН
7701631720
КПП
770101001
ОКПО
79409413
Код ОКОГУ
4210014
Организации, учрежденные юридическими лицами или гражданами, или юридическими лицами и гражданами совместно
Код ОКОПФ
12300
Общества с ограниченной ответственностью
Код ОКФС
16
Частная собственность
Код ОКАТО
45286555000
Басманный
Код ОКТМО
45375000000
муниципальный округ Басманный
Регистрация в ФНС
Регистрационный номер 1057749283206 от 29 ноября 2005 года
Межрайонная инспекция Федеральной налоговой службы №46 по г. Москве
Регистрация в ПФР
Регистрационный номер 087108064193 от 6 декабря 2005 года
Государственное учреждение — Главное Управление Пенсионного фонда РФ №10 Управление №2 по г. Москве и Московской области муниципальный район Басманное г. Москвы
Регистрация в ФСС
Регистрационный номер 772703614877271 от 5 декабря 2005 года
Филиал №27 Государственного учреждения — Московского регионального отделения Фонда социального страхования Российской Федерации
Щербачев Сергей Вячеславович
ИНН 772871949232
с 29.11.2005
100%
46.9
Торговля оптовая неспециализированнаяОСНОВНОЙ
43.99.6
Работы каменные и кирпичные
43.99.2
Работы по установке строительных лесов и подмостей
35.14
Торговля электроэнергией
43. 32
Работы столярные и плотничные
43.99.4
Работы бетонные и железобетонные
43.34
Производство малярных и стекольных работ
42.21
Строительство инженерных коммуникаций для водоснабжения и водоотведения, газоснабжения
+ ещё 34
Финансовая отчётность ООО «РПФ САНДЭР» согласно данным ФНС и Росстата за 2013–2021 годы
Уплаченные ООО «РПФ САНДЭР» – ИНН 7701631720 – налоги и сборы за 2021 год
Страховые и другие взносы на обязательное пенсионное страхование, зачисляемые в Пенсионный фонд Российской Федерации
43,5 тыс. ₽
Налог на добавленную стоимость
949,3 тыс. ₽
Страховые взносы на обязательное медицинское страхование работающего населения, зачисляемые в бюджет Федерального фонда обязательного медицинского страхования
12,8 тыс. ₽
Страховые взносы на обязательное социальное страхование на случай временной нетрудоспособности и в связи с материнством
4,4 тыс. ₽
Налог на прибыль
466,3 тыс. ₽
Итого
1,5 млн ₽
Согласно данным ФНС, среднесписочная численность работников за 2021 год составляет 1 человек
2021 г.
1 человек
20,8 тыс. ₽
2020 г.
1 человек
5,2 тыс. ₽
Значения рассчитаны автоматически по сведениям о взносах в фонд обязательного медицинского страхования и среднесписочной численности ООО «РПФ САНДЭР», эта информация может быть неточной
Согласно данным ЕГРЮЛ от ФНС, ООО «РПФ САНДЭР» имеет 1 лицензию
Виды лицензируемой деятельности
Деятельность по монтажу, техническому обслуживанию и ремонту средств обеспечения пожарной безопасности зданий и сооружений
1
Тип
Количество
Общая сумма
94-ФЗ
—
—
44-ФЗ
—
—
223-ФЗ
—
—
Тип
Количество
Общая сумма
94-ФЗ
3
832,4 тыс. ₽
44-ФЗ
2
4,2 млн ₽
223-ФЗ
—
—
Согласно данным ФГИС «Единый Реестр Проверок», с 2015 года в отношении ООО «РПФ САНДЭР» была инициирована 1 проверка
1
без нарушений
0
выявлены нарушения
0
результатов ещё нет
Последняя проверка
Внеплановая документарная и выездная проверка № 77170803015199 от 18 декабря 2017 года
Проверку проводит Главное управление МЧС России по г Москве
Нарушений не выявлено
Согласно данным картотеки арбитражных дел, в арбитражных судах РФ было рассмотрено 1 судебное дело с участием ООО «РПФ САНДЭР»
0
в роли истца
1
в роли ответчика
Последнее дело
№ А40-239142/2021 от 8 ноября 2021 года
Экономические споры по административным правоотношениям
Ответчик
ООО «РПФ САНДЭР»
Полная хронология важных событий с 29 ноября 2005 года
07. 11.2017
В ЕГРЮЛ внесена отметка о недостоверности юридического адреса
14.11.2017
Юридический адрес изменен с 105082, г. Москва, ул. Почтовая Б., д. 34, стр. 12 на 105082, г. Москва, Рубцовская набережная, д. 3, стр. 1, этаж 1 пом. I к. 31 офис 11
Удалена отметка о недостоверности юридического адреса
03.04.2018
Сдана финансовая отчётность за 2017 год
04.04.2019
Сдана финансовая отчётность за 2018 год
01.04.2020
Сдана финансовая отчётность за 2019 год
31.03.2021
Сдана финансовая отчётность за 2020 год
31.03.2022
Сдана финансовая отчётность за 2021 год
Похожие компании
ООО «АРДИС»
г. Ковров, Владимирская область
3305800960
ООО «АЛЬФА»
г. Челябинск, Челябинская область
7447267712
ООО «КО»
г. Курган, Курганская область
4501223809
ООО ПТСК «СОМЕС ИНТЕРНЕШНЛ»
г. Нижний Новгород, Нижегородская область
5262281326
ООО «ОЛМЕТ»
г. Москва
7721785580
ООО «ОСНОВА»
г. Пенза, Пензенская область
5836897720
ООО «ТК АРИОН»
г. Нижнекамск, Республика Татарстан
1651088215
ООО «РПФ САНДЭР» из Москвы | ИНН 7701631720, КПП 770101001
Причина жалобы
Вернуться Подписаться на изменения
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР»
Показатели надежности
Сведения о регистрации
по данным ЕГРЮЛ и ЕГРИП
Финансовые показатели
Доходы, тыс. ₽
2021 79.42%
7 691 000,00 ₽
2020 365.65%
37 373 000,00 ₽
2019 0. 59%
8 026 000,00 ₽
2018 23.3%
7 979 000,00 ₽
2017
6 471 000,00 ₽
Расходы, тыс. ₽
2021 79.34%
7 251 000,00 ₽
2020 355.81%
35 093 000,00 ₽
2019 0.22%
7 699 000,00 ₽
2018 25.36%
7 682 000,00 ₽
2017
6 128 000,00 ₽
Страховые взносы в ПФ, тыс. ₽
2021 308.19%
43 541,04 ₽
2020
10 666,80 ₽
За 2021 год доход ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР» уменьшился на 79.42% и составил 7 691 000,00 ₽. Расход упал на 79.34% — 7 251 000,00 ₽.
За 2021 год организация внесла в ПФР 43 541,04 ₽, что на 308.19% выше, чем за предыдущий 2020 год.
Заказчик закупок
Общая сумма по договорам с поставщиками 0 ₽
Информация об актуальных тендерах и завершенных закупках ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР» отсутствует.
Участник закупок
Общая сумма по договорам с заказчиками 4 229 013,72 ₽
100.00%4 229 013,72 ₽
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ НАУЧНОЕ УЧРЕЖДЕНИЕ «ВСЕРОССИЙСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МЯСНОЙ ПРОМЫШЛЕННОСТИ ИМЕНИ В.М. ГОРБАТОВА»
Компания продавала товары
Приборы и аппаратура для физического или химического анализа прочие, не включенные в другие группировки
17
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР» участвовала в 2 закупках и стала победителем в 2 из них. Больше всего раз принято участие в тендерах заказчика ФГБНУ «ВНИИМП им. В.М. Горбатова». ООО «РПФ САНДЭР» предоставила 1 товар и услугу 1 заказчику, на общую сумму по договорам 4 229 013,72 ₽. Наиболее популярный объект закупки — Приборы и аппаратура для физического или химического анализа прочие, не включенные в другие группировки — был продан в количестве 17.
У ООО «РПФ САНДЭР» найдено 1 номер телефона и 2 адреса электронной почты, по которым можно связаться.
Виды деятельности
46.9
Торговля оптовая неспециализированная
43.99.7
Работы по сборке и монтажу сборных конструкций
35.14
Торговля электроэнергией
41.20
Строительство жилых и нежилых зданий
43.2
Производство электромонтажных, санитарно-технических и прочих строительно-монтажных работ
42.21
Строительство инженерных коммуникаций для водоснабжения и водоотведения, газоснабжения
42.22.1
Строительство междугородних линий электропередачи и связи
42.22.2
Строительство местных линий электропередачи и связи
42.99
Строительство прочих инженерных сооружений, не включенных в другие группировки
43.11
Разборка и снос зданий
43.12.3
Производство земляных работ
43.99.3
Работы свайные и работы по строительству фундаментов
43.99.4
Работы бетонные и железобетонные
43.99.5
Работы по монтажу стальных строительных конструкций
43. 21
Производство электромонтажных работ
43.22
Производство санитарно-технических работ, монтаж отопительных систем и систем кондиционирования воздуха
43.29
Производство прочих строительно-монтажных работ
43.3
Работы строительные отделочные
43.31
Производство штукатурных работ
43.32
Работы столярные и плотничные
43.99.6
Работы каменные и кирпичные
43.33
Работы по устройству покрытий полов и облицовке стен
43.34
Производство малярных и стекольных работ
43.39
Производство прочих отделочных и завершающих работ
43.91
Производство кровельных работ
43.99
Работы строительные специализированные прочие, не включенные в другие группировки
43.99.1
Работы гидроизоляционные
43.99.2
Работы по установке строительных лесов и подмостей
46.43
Торговля оптовая бытовыми электротоварами
46.44
Торговля оптовая изделиями из керамики и стекла и чистящими средствами
46. 46
Торговля оптовая фармацевтической продукцией
46.49
Торговля оптовая прочими бытовыми товарами
46.49.33
Торговля оптовая писчебумажными и канцелярскими товарами
46.6
Торговля оптовая прочими машинами, оборудованием и принадлежностями
46.66
Торговля оптовая прочей офисной техникой и оборудованием
46.74
Торговля оптовая скобяными изделиями, водопроводным и отопительным оборудованием и принадлежностями
Торговля розничная изделиями, применяемыми в медицинских целях, ортопедическими изделиями в специализированных магазинах
47.75
Торговля розничная косметическими и товарами личной гигиены в специализированных магазинах
52.24
Транспортная обработка грузов
73.1
Деятельность рекламная
Учредители
Щербачев Сергей Вячеславович
100%
Филиалы и представительства
Сведения о филиалах и представительствах ООО «РПФ САНДЭР» отсутствуют.
Лицензии
Руководители
Щербачев Сергей Вячеславович
Генеральный директор
У ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР» обнаружено 2 связи с организациями.
По юридическому адресу «105082, г Москва, Басманный р-н, Рубцовская наб, д 3 стр 1, помещ I ком 31 офис 11» зарегистрировано 2 связанные фирмы, статус которых «Ликвидирована».
Связи по руководителю, связи по учредителям, дочерние организации не зафиксированы.
Среднесписочная численность
Численность, чел.
2021
1
2020
1
2019
1
2018
1
2017
1
Краткая справка:
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «РПФ САНДЭР» находится в Москве по адресу 105082, г Москва, Басманный р-н, Рубцовская наб, д 3 стр 1, помещ I ком 31 офис 11. Статус организации: Действующая. Руководитель: Щербачев Сергей Вячеславович. Основной вид деятельности организации — Торговля оптовая неспециализированная, также ООО «РПФ САНДЭР» работает по следующим направлениям: Работы по сборке и монтажу сборных конструкций, Торговля электроэнергией, Строительство жилых и нежилых зданий, Производство электромонтажных, санитар.
Среднесписочная численность компании за 2021: 1 Финансовые показатели за 2020: доходы — 37373000, расходы — 35093000, взносы в ПФР — 10666.8. Дата регистрации: 29.11.2005 ИНН 7701631720, КПП 770101001, ОГРН 1057749283206, ОКПО 79409413. Огранизационно-правовая форма: Общество с ограниченной ответственностью (12300). Форма собственности: Частная собственность (16). Территориальная принадлежность: Басманный (45286555000), муниципальный округ Басманный (45375000000). Классификатор органов государственной власти и управления: Организации, учрежденные юридическими лицами или гражданами, или юридическими лицами и гражданами совместно (4210014).
Победы в строительных закупках — 2, участник закупок — 0 (за последние 3 года) Основной контрагент — ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ НАУЧНОЕ УЧРЕЖДЕНИЕ «ВСЕРОССИЙСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МЯСНОЙ ПРОМЫШЛЕННОСТИ ИМЕНИ В.М. ГОРБАТОВА», основные товары и услуги: Приборы и аппаратура для физического или химического анализа прочие, не включенные в другие группировки
Данные актуальны на 05.01.2023. Контактные данные ООО «РПФ САНДЭР»
Информация получена из официальных источников и предоставляется в соответствии со ст. 7 Федерального закона «Об информации, информационных технологиях и о защите информации» от 27.07.2006 N 149-ФЗ
Сандерс рекламирует налог на финансовые операции как задолженность по студенческой ссуде Rx
Хотя это не совсем ограбление Питера, чтобы заплатить Полу, новое законодательное предложение направлено на погашение всей задолженности по студенческой ссуде — за счет поступлений от налога, который ударит по пенсионным сбережениям.
Сначала рекламируемый как попытка ограничить спекулятивную торговлю, так называемый налог на финансовые транзакции теперь предлагается, чтобы помочь списать все долги по студенческим кредитам.
Сенатор США и кандидат в президенты Берни Сандерс (I-VT) перераспределил доходы от своего Закона об инклюзивном процветании, чтобы помочь оплатить Закон о колледже для всех, который, как он утверждает, устранит все 1,6 триллиона долларов студенческого долга для 45 миллионов американцев.
Законодательство, к которому в Палате представителей присоединились представители Прамила Джаяпал (D-WA) и Ильхан Омар (D-MN), также направлено на отмену платы за обучение во всех государственных четырехлетних колледжах и университетах, а также общественные колледжи, профессиональные училища и программы ученичества бесплатно для всех.
Согласно пресс-релизу, предполагаемая стоимость законопроекта в размере 2,2 триллиона долларов будет полностью оплачена за счет «налога на спекуляции на Уолл-стрит», в соответствии с которым сделки будут облагаться налогом по ставке 0,5% для акций, 0,1% для облигаций, и 0,005% для деривативов. Спонсоры отмечают, что закон привлечет до 220 миллиардов долларов в первый год и более 2,4 триллиона долларов в течение 10 лет.
Законодатели утверждают, что в дополнение к тому, что обучение в государственных колледжах станет бесплатным, налог на финансовые операции поможет «сократить спекуляции и высокочастотную торговлю, которые дестабилизируют финансовые рынки».
«Поскольку рост торговли на Уолл-Стрит за последние несколько десятилетий не принес пользы работающим американцам, сокращение торговли в результате налога на финансовые операции не повредит сбережениям среднего класса, которые инвестируют через пенсионные фонды или взаимные фонды». далее утверждают законодатели. На самом деле они утверждают, что «эти люди, вероятно, сэкономят деньги, потому что с них будет взиматься меньшая комиссия за сделки».
Более того, Сандерс, Джаяпал и Омар утверждают, что для «редких домохозяйств со скромным достатком, которые торгуют напрямую или через брокера», законодательство предоставит льготу по подоходному налогу для компенсации всего налога на финансовые операции для лиц с доходом менее более 50 000 долларов США и супружеские пары с доходом менее 75 000 долларов США. Этот язык идентичен тому, который использовался для описания воздействия налога в конце мая.
В то время авторы законопроекта заявляли, что «…сокращение торговли в результате введения налога на финансовые операции не повредит сбережениям среднего класса, инвестирующим через пенсионные фонды или взаимные фонды. На самом деле, эти люди, скорее всего, сэкономят деньги, потому что с них будет взиматься меньшая комиссия за сделки».
Хотя маловероятно, что этот транзакционный налог получит какое-либо значение в нынешнем Конгрессе, ожидайте, что он станет горячей темой предвыборной кампании. Закон об инклюзивном процветании аналогичен Закону о налогах Уолл-стрит, представленному ранее в этом году сенатором и кандидатом в президенты Кирстен Гиллибранд (штат Нью-Йорк), среди прочих, но он устанавливает другие ставки по акциям, облигациям и деривативам на основе существующих транзакционных издержек в каждый рынок.
Красные шлифовальные машины найдены в поезде Мумбаи
13 января 2023 г. | Последнее обновление: 03:44 IST
РАЗРЫВ! :
BVR Mohan Reddy: живой пример успеха благодаря дизайну
Нация Текущие события 28 ноября 2017 г. Ченнаи: Ред Сандерс …
Нация, текущие события
ДЕКАНСКАЯ ХРОНИКА. | DECCAN CHRONICLE
Опубликовано 28 ноября 2017 г., 1:51 IST
Обновлено 28 ноября 2017 г., 1:51 IST
По словам источника РПФ, в понедельник вечером группа саперов РПФ проверила поезд, прибывший из Центрального Мумбаи в Ченнаи.
Ченнаи: Во время антидиверсионной проверки в поезде на Центральном железнодорожном вокзале Ченнаи Силы защиты железных дорог (RPF) обнаружили контрабандные красные шлифовальные машины на сумму 10 000 рупий.
Согласно источнику РПФ, группа саперов РПФ проверила поезд, прибывший из Центрального Мумбаи в Ченнаи, в понедельник вечером.
Робототехника и автономные системы: 13 важных фактов
Тема обсуждения: Робототехника и автономные системы.
В этой статье мы обсудим основные идеи робототехники и автономных систем с небольшими представлениями и предварительными исследованиями. Статья «Робототехника и автономные системы» даст ответы и в следующих темах.
Что такое робот?
Предпосылки робототехники
Отец робототехники
Что такое автономная система?
Чем он отличается от робота?
Сравнение робототехники и автономных систем
Все ли автономные роботы сегодня — настоящие роботы?
Есть ли что-то, чего не может сделать робот?
В чем главный недостаток использования робота?
Захватят ли роботы людей?
Каковы применения робототехники и автономных систем?
Типы роботов по приложениям
Типы роботов по средам взаимодействия
Будущее робототехники и автономных систем
Что такое робот?
A робот — это машина, в частности та, которую люди могут запрограммировать с помощью компьютера для автоматического выполнения множества сложных действий. Другими словами, робот — это автономная машина, которая спроектирована и создан для воспроизведения движений, подобных человеческим.
Роботы могут быть полуавтономными или полностью автономными в зависимости от степени предоставляемого им контроля. Первый тип обычно управляется локализованным устройством управления вне робота, тогда как последний обычно имеет встроенную систему управления. Отрасль технологии, которая обеспечивает полное развитие робота, начиная с его проектирования и заканчивая развитием его функциональности, называется робототехникой.
Гуманоидный робот, Image Source: Softbank Robotics Европа, Робот NAO (bleu et rouge) , CC BY-SA 4.0
Айзек Азимов, в 1942 году представил три закона робототехники, которые до сих пор используются в качестве образца, направляя нас к разработке робота:
Предпосылки робототехники
Термин ‘робот» происходит от славянского корня, который имеет значения, идентифицируемые с ‘труда«. Одним из первых инцидентов, которые засвидетельствовали зарождение ранней робототехники, была разработка механического устройства около 3000 г. до н.э., которое было сконструировано для регулярного выполнения определенной физической задачи. Работа заключалась в том, чтобы бить часовые колокола в египетских водяных часах, и для этой цели они построили человеческие фигурки.
Эпоха 400 г. до н.э. ознаменовалась дальнейшими инновациями в робототехнике изобретателем шкива и винта Архитасом Тарентским, который создал летающего голубя из дерева. За ним последовали статуи с гидравлическим приводом в Греческом Египте в 200 г. до н.э. Кукла, построенная Петронием Арбитером в 100 г. до н.э., была первым экземпляром робота-гуманоида. Джованни Торриани был создателем деревянного робота, который мог приносить хлеб насущный императора из магазина в 1557 году.
XIX век также стал свидетелем множества роботизированных творений, таких как говорящая кукла Эдисона и робот с паровым двигателем, созданный канадцами. Несмотря на эти корни вдохновения для современного робота, научный прогресс в робототехнике и автономных системах, достигнутый в 19 веке, в огромной степени превзошел предыдущие достижения.
Отец робототехники
Геродж С. Девол был изобретателем из Луисвилля, штат Кентукки, который построил самых первых роботов, о которых мы знаем, в начале 1950-х годов. Он изобрел перепрограммируемый манипулятор и запатентовал его как «Объединить, »Из« Универсальной автоматизации ». В течение следующего десятилетия он предпринял несколько попыток создать рынок для своего продукта в области робототехники и автономных систем, но безуспешно. Джозеф Англебергер приобрела патент на робота Devol в конце 1960-х годов. Он был инженером и бизнесменом, который преобразовал Unimate в промышленного робота и основал компанию Unimation для производства и продажи роботов. Англебергер добился успеха в своих усилиях и известен в отрасли как «Отец робототехники.
Shakey был усовершенствованием оригинального Unimate, разработанного Стэнфордским исследовательским институтом в 1958 году, который был разработан для специализированных промышленных приложений, хотя и ограничивался академической сферой. У Шейки был улучшенный уровень восприятия с помощью телевизионных «глаз» и колес для передвижения по незнакомой местности. Это также могло в определенной степени реагировать на его окружение. Имя Шейки получил из-за его шаткого и грохочущего движения.
Сравнение робототехники и автономных систем
Что такое автономная система? Чем он отличается от робота?
Робототехника и автономные системы: Автономность — это способность системы принимать собственные решения на основе того, как она воспринимает окружающую среду. Автономность у людей порождает способность выполнять самые основные и значимые задачи, связанные с их конечностями и другими внешними частями тела. Он может варьироваться от ходьбы и разговора до еды и подъема вещей. Следовательно, автономность — это характеристика самого робота, которая определяет степень контроля, который он может иметь в отношении реакции на воспринимаемую среду.
3 балла робототехники и автономных систем
Три концепции, которые играют решающую роль в развитии автономных действий в роботе: восприятие, решение и приведение в действие.
Восприятие:
С точки зрения восприятия человеческими существами наибольшее внимание уделяется пяти основным чувствам. Мы используем наши глаза, уши, нос, язык и кожу, чтобы воспринимать окружающую среду через зрение, слух, запах, вкус и прикосновение. Эти виды чувств передаются роботу с помощью широкого набора датчиков, которые действуют как устройства ввода робота.
Фактически, в сегодняшнюю информационную эпоху Интернет представляет собой море данных, которые могут быть переданы робототехнике и автономным системам в качестве входных данных. Такой нематериальный источник информации отличается от обычных датчиков, основанных на оборудовании. Например, лазерные сканеры и камеры стереовидения могут действовать как глаза робота, датчики ударов могут обеспечивать восприятие, эквивалентное человеческой коже, а датчики силы-момента могут давать расчет напряжения мышц.
Решение:
У людей нервная система посылает сигнал в мозг в подходящее время, который принимает большинство решений о том, как тело должно реагировать на определенную среду. Мозг принимает самые сложные решения. Тем не менее, иногда рефлекторное поведение в среде, представляющей опасность, является примером того, как наша сложная анатомия захватывает мозг. Мы называем это ситуацией «бей или беги». Следовательно, наше тело достаточно умно, чтобы принимать решения о наших действиях, чтобы обезопасить нас, даже до того, как мозг поймет, что происходит в непосредственной близости от опасных элементов.
Автономные роботы имитируют аналогичную систему принятия решений. Компьютер действует как мозг робота, который воспринимает окружающую среду, понимает ее миссию / цель и принимает меры в отношении нее. Автономность дает роботу возможность повысить интеллект в процессе принятия решений. Это похоже на управление машиной в безопасном режиме. Автономный робот будет достаточно умен, чтобы ощущать опасности вокруг себя и либо останавливать, либо изменять свой образ действий по пути. Автономность приравнивает человеческую неврологическую систему роботов.
Действие:
Мышечные ткани у людей работают как приводы. Они работают с помощью химических сигналов, посылаемых в мозг. Эти мышцы могут иметь различную форму в зависимости от выполняемой ими функции. У роботов также есть разные типы исполнительных механизмов, которые работают с помощью двигателя и бесконечного количества переключений. Двигатель действует как сердце привода. Этот привод может быть гидравлическим, пневматическим и даже электрическим. Гидравлические приводы используют жидкость, пневматические приводы используют давление воздуха, а последний использует электрический ток для преобразования энергии в желаемое движение.
Все ли автономные роботы сегодня — настоящие роботы?
За прошедшие годы определение робота несколько раз разрывалось, чтобы сделать его более подходящим для соответствия маркетинговым трендам. Этот термин взаимозаменяемо используется для обозначения предварительно запрограммированных машин, использующих компьютер, и они многократно повторяют один и тот же процесс, который был введен в их систему управления.
Сегодня промышленные роботы-манипуляторы, которые выполняют основную операцию «подобрать и разместить», являются наиболее ярким примером таких заранее запрограммированных машин, которые не обладают способностью воспринимать неизвестную среду. Например, если такой робот научился перемещаться из одного места в другое без препятствий между ними, для выполнения определенной работы, сможет ли он сделать то же самое в случайной среде с точными координатами местоположения, но полной препятствий? Ну нет. Это потому, что они не могут понять случайную среду и извлечь уроки из ее неопределенностей.
С другой стороны, робот-пылесос Roomba — это настоящий робот, потому что он может воспринимать окружающую среду за пределами своей памяти и принимать решения о дальнейших действиях. Проще говоря, если Roomba наткнется на игрушку на полу, он сможет изменить свое направление и двинуться вперед к своей цели.
Есть ли что-то, чего не может сделать робот?
Даже если робот достигнет уровня интеллекта, эквивалентного человеческому существу, ему всегда будет не хватать сочувствия. Робот никогда не сможет позаботиться о ребенке, как мать. Он также не сможет добавить к процессу обучения и умственного развития ребенка, которые требуют реального человеческого взаимодействия.
Независимо от того, насколько мы продвинулись в совершенствовании шеф-бота (робота, который умеет готовить), он никогда не будет достаточно умен, чтобы овладеть искусством приготовления пищи. Потому что робот не может чувствовать запах и вкус и никогда не сможет развить интуитивную способность смешивать ингредиенты и измерять, что делает человека поваром.
Также робот не может развить творческие способности, чтобы стать художником. Следовательно, мы можем с уверенностью признать, что в человеческих существах есть определенные качества, которые нельзя создать искусственно в автономной машине, и которые также отличают человеческий вид от других живых организмов, не говоря уже о роботах.
В чем главный недостаток использования робота?
Требования к питанию и обслуживание:
Электроэнергия, потребляемая роботом для круглосуточной работы на фабриках и в промышленности, требует значительных инвестиций. Объем необходимого технического обслуживания и оборудование, необходимое для ремонта и постоянной эксплуатации, стоит таких денег, которые могут отнять у человека работу. В случае поломки это только увеличит финансовые потери компании.
Зависимость от программы:
Поскольку роботы строго придерживаются программ, которые загружаются в их систему, они часто не попадают в цель при малейших ошибках и создают проблему для самого создателя.
Потеря работы:
Наконец, если роботы возьмут на себя всю работу людей, это повлияет на человеческое тело из-за отсутствия основных движений и упражнений. Это также заставит человеческий разум бездействовать.
Какое будущее у роботов? Захватят ли роботы людей?
Робот против человека
Робототехник Кен Голдберг говорит, что мы должны перестать думать о роботах как о проблеме для человечества, но воспринимать их как нечто, что может сотрудничать с человеком, чтобы делать вещи лучше. Если мы спросим, захватят ли когда-нибудь роботы людей, то это успокаивающе дает нам понять, что мы не увидим такого рода восстания роботов в ближайшее время.
Но мы почти не понимаем, насколько сложно то, что мы, люди, делаем. И то, что роботы могли выполнять до настоящего времени, по своей природе довольно элементарно. Независимо от того, насколько близки гуманоидные роботы к людям с точки зрения эстетики, робототехника и автономные системы далеки от реальности, имитируя сложные мышечные рефлексы человеческого тела. Таким образом, робототехника и автономные системы значительно продвинутся вперед в ближайшие годы, но роботы, завоевавшие человечество, все еще остаются далекой реальностью.
Каковы приложения робота?
Робототехника имеет несколько типичных применений в автомобильной промышленности, таких как покраска, пайка, сварка и сборка футеровки. Эта отрасль в основном использует роботов для выполнения повторяющихся задач в логистике и производстве. Роботы находят применение и в других областях, помимо автомобильной промышленности. Следовательно, можно сделать широкую классификацию в области робототехники и автономных систем в ее приложениях.
Типы роботов по приложениям:
С другой стороны, роботы, ориентированные на обслуживание, помогают людям в их задачах. Ранее мы читали о Roomba как о домашнем сервисном роботе, предназначенном для уборки пылесосом. У обороны есть СВУ (самодельное взрывное устройство) и разведывательные дроны. Кроме того, в медицине используются робототехника и автономные системы при обучении и реабилитации.
Типы роботов по средствам взаимодействия:
Другой способ классификации роботов относится к средствам взаимодействия с окружающей средой.
Роботы могут локомотив в окружающей среде через любую ее среднюю сушу, воздух или воду, в зависимости от того, что они могут быть ногами или колесным роботом, подводным роботом или летательным аппаратом. Летательный аппарат можно подразделить на самолет с неподвижным крылом и вертолет. У нас также есть роботы-амфибии, которые работают как на суше, так и в воде. Ученые постоянно делают успехи в разработке роботов-вездеходов. На рисунке ниже мы увидим различные применения робототехники и автономных систем, такие как наземный робот, водный робот и воздушный робот. Есть несколько других приложений робототехники и автономных систем в современную эпоху.
Колесные роботы широко используются в исследованиях внеземной поверхности. В то время как у нас есть подводные роботы, которые используются для мытья полов в бассейне или аналогичном водоеме. Однако у воздушных роботов есть применение в более широком диапазоне областей, начиная от оборонного сектора и заканчивая индустрией развлечений.
Дополнительные статьи нажмите здесь.
Топ-10 автономных роботов для сельского хозяйства
Будущее сельского хозяйства за автономными роботами, которые будут выполнять всю работу на полях. И среди них уже есть довольно любопытные прототипы.
Последние несколько лет начинает появляться все больше разработок в робототехнике, которые автоматизируют различные процессы в сельском хозяйстве. При этом самыми интересными из них являются автономные аппараты, которые уже сегодня могут работать и принимать решения самостоятельно. Разработкой автономных роботов чаще всего занимаются небольшие компании или стартапы, а также университеты со всего мира.
Вот подборка из 10 наиболее перспективных роботов для сельского хозяйства.
1. Adigo Field Flux Robot — специалист по азоту
Азотные удобрения выделяют N2O, который негативно влияет на экологию и может повредить растения: пожелтение листьев, разрушение мембраны или замедление роста. В первую очередь, чтобы предотвратить негативное воздействие закиси азота на растения нужно определить количество N2О на поле. В среднем такой тест занимает 27 часов, но компания Adigo разработала робота, который может это сделать за час. Внешне аппарат напоминает коромысло, он опускает алюминиевые блоки на землю и проводит анализ почвы.
На данный момент компания разрабатывает новую версию робота, которая будет легче и более производительной.
Field Flux Robot. Источник: adigo.no
2. Ecorobotix — теннисный стол, который борется с сорняками
Робот Ecorobotix. Источник: inventerdemain.org
Стартап Ecorobotix презентовал этого робота в начале 2016 года. Робот оснащен камерами, благодаря которым он отличает сорняки от других растений, затем он направляет на них подвижный опрыскиватель и выпускает небольшую дозу гербицидов. Такой подход в 2-3 раза сокращает использование гербицидов на поле. Робот ориентируется в пространстве благодаря GPS-трекеру и датчикам, а сверху на нем установлены солнечные панели, которые позволяют ему работать 12 часов без подзарядки.
3. Ladybird — робот-картограф, который мониторит состояние посевов
Ladybird. Источник: confluence.acfr.usyd.edu.au
Робот Ladybird или «Божья коровка» был спроектирован и построен специально для овощной промышленности. Его используют для наблюдения за фермой и составления технологических карт. На нем установлен целый ряд датчиков и солнечных панелей, которые позволяют роботу следить за ростом растений и появлением вредителей круглосуточно. Тесты показали, что робот может работать три дня без подзарядки. У «Божьей коровки» также есть механическая рука, которая позволяет удалять с поля сорняки.
Создатель робота, профессор Сиднейского университета Салах Суккари, в дальнейшем планирует использовать свое изобретение для сбора урожая. Напомним, что он также является автором робота-пастуха SwagBot.
4. Rosphere — колобок, который найдет больные растения
Робот-колобок Rosphere. Источник: phys.org
Исследователи из Мадридского университета создали сферического робота для сбора информации о состоянии почвы и посевов. Принцип передвижения робота напоминает зорб или прогулочный шар — внутри Rosphere находится маятниковый механизм, способный двигаться в двух независимых направлениях по команде электронной системы управления. Конструкция позволяет роботу не только катиться по прямой, но и совершать повороты. Робот-колобок оснащен GPS-трекером и целым рядом датчиков, благодаря которым он собирает информацию о здоровье посевов, составе почвы, ее температуре и влажности. Затем он передает эту информацию на компьютер фермера с помощью Wi-fi.
Стартап Harvest Automation создал робота, который перемещает горшки с растениями. Эта работа является одной из самых низкооплачиваемых в питомниках для растений, но использование робота намного дешевле человеческого труда. Вначале роботу нужно указать местоположение растений, после этого Nursery Bot с помощью датчиков находит горшок, закрепляет его механической рукой и перевозит в нужное место. Аппарат может работать на протяжении 10 часов и обойдется фермерам в $30 000.
В будущем разработчики робота планируют добавить ему возможность обрезать и опрыскивать растения пестицидами.
6. Prospero — робот, который умеет сажать семена
Робот-паук Prospero. Источник: directindustry.com
Робота-паука по имени Prospero разработал инженер Дэвид Доурхаут, который работает в MIT. На данный момент существуют рабочие прототипы, которые могут лишь садить семена на поле. В дальнейшем изобретатель хочет, чтобы его Prospero мог пропалывать грядки, вносить удобрения и собирать урожай. Шестиногие роботы способны решать, где и когда сеять семена на различных типах почвы в пределах одного поля. Также они могут общаться друг с другом, находясь на расстоянии около трех метров. При помощи светодиодов один робот может сообщить другому, что ему нужна помощь в посадке семян.
По словам разработчика, самым сложным в процессе создания было «научить» робота узнавать, где семена уже есть. Чтобы решить эту проблему Доурхаут научил Prospero отмечать место, где посажено семя пятном белой краски. Когда соседние роботы, оснащенные специальными датчиками, обнаруживают это место, они перемещаются на другой участок поля.
7. Aquarius — передвижная леечка
Робот-водолей Aquarius. Источник: parallax.com
Еще один робот Дэвида Доурхаута. Aquarius способен перевозить 114 литров воды и используется для полива тепличных растений. Робот работает в двух режимах: фиксированный и пропорциональный. В первом случае, аграрий сам устанавливает нужную дозу для полива растений и потом уже аппарат работает по заданным настройкам. Второй вариант — робот с помощью сенсоров анализирует сколько воды нужно каждому растению и сам решает вопрос дозировки.
Помимо полива растений Aquarius может также открывать двери и перемещаться между комнатами — это весьма удобно, если растения находятся в разных помещениях.
8. Vitirover — робот, который не любит сорняки на виноградниках
Vitirover — это робот, который предназначен для срезания травы и сорняков между виноградными лозами. Благодаря датчикам и GPS-трекеру маленький французский робот умеет различать виноград от других растений и может двигаться по полю без посторонней помощи. Предвадварительно настроить робота можно с помощью мобильного приложения. В общей сложности, один робот может обработать 1 га за 150 часов работы, работая даже ночью благодаря установленной солнечной панели.
9. Oz — робот, который умеет следовать за фермером
Oz Weeding Robot. Источник: naio-technologies.com
Компания Naio Technologies разработала автономного робота по имени Oz, который пропалывает грядки и убирает сорняки. Аппарат работает в трех режимах: автономный, ручной и «слежка». Последний режим означает, что робот едет за определенным объектом в поле видимости. Помимо уборки Oz может также помочь в перетягивании небольших грузов. Например, он может везти за вами канистру или орудие труда.
На роботе установлено четыре электрических двигателя мощностью 110 ватт, полного заряда ему хватает на 7-10 часов работы в зависимости от режима работы. Самый энергозатратный — автономный режим.
Rowbot следит за состоянием и развитием посевов, а также анализирует содержание азота в почве. Если робот обнаружит, что в почве очень мало азота, то он рассчитывает нужную дозу и удобряет почву. Такой подход поможет повысить урожайность кукурузы, ведь культура получит нужные микроэлементы в наиболее подходящий момент.
Помимо того, что автономные роботы облегчают жизнь фермеру, они еще и снижают расходы на рабочую силу и быстрее выполняют монотонную работу. Поэтому в будущем использование роботов-беспилотников будет обычным делом для эффективного фермера. И хотя пока не существует универсального робота, который может делать «все и сразу», но в комплексе эти аппараты позволяют создать практически автономную ферму.
Применение автономных мобильных роботов — 7 ключевых применений
Благодаря расширенным возможностям плавной навигации AMR могут решать проблемы, с которыми не могут справиться AGV.
Это открывает множество возможностей для обработки приложений, которые AGV сочли бы трудными или невозможными, и дает важные операционные преимущества для бизнеса. Следующие примеры их использования покажут, что я имею в виду.
7 приложений AMR, которые AGV не могут выполнять
Несмотря на то, что они во многом похожи, AMR обычно обладают более высоким уровнем способности принимать независимые решения, чем AGV, особенно когда речь идет о навигации.
Подождите. .. если вы не понимаете, о чем я, не пропустите эту статью: Различия между AGV и AMR на пути AMR он может обойти его . В той же ситуации AGV будет придерживаться своего фиксированного, заранее определенного пути, затем остановится и будет ждать, пока препятствие не будет удалено.
По сути, эти две функции, такие как безрельсовая навигация и автономное решение о пути , делают AMR лучшим вариантом для определенных задач. Конечно, есть и другие достойные применения agvs.
Важнейшим из многих преимуществ как AGV, так и AMR является то, что они избавляют людей от необходимости выполнять утомительные задачи и позволяют им сосредоточиться на более важных видах деятельности.
У них нет требований к заработной плате, перерывам на отдых, сну или отпуску по болезни, и они не делают ошибок. Они работают быстро, эффективно и непрерывно, а их использование легко увеличивать и уменьшать по мере изменения спроса.
Distribution Centers
Cleaning and Disinfection
Autonomous Security Robots (ASRs)
Hospitals and Healthcare
Hospitality
Продуктовые магазины
Доставка последней мили
1. AMR в распределительных центрах
Мобильные роботы широко применяются на складах и в распределительных центрах. AMR могут выполнять погрузку, разгрузку, транспортировку, штабелирование и извлечение паллетированных и других крупных грузов.
Автономные мобильные роботы для склада добавляют большую гибкость при выполнении этой работы, но их превосходство становится еще более очевидным при работе с отдельными упаковками или предметами, а не целыми массовыми единицами.
Кто главный в этом приложении ? Конечно, Амазон. Роботы Amazon выполняют множество различных задач в центрах обработки данных и центрах обработки заказов с выдающимися уровнями производительности, что позволяет доставлять посылки менее чем за 24 часа.
Для относительно сложных операций, таких как сбор заказов, AMR могут выйти далеко за рамки возможностей AGV.
Зарегистрируйтесь и загрузите инфографику agvnetwork.com о AMR в центрах электронной торговли. Вы можете скачать это здесь.
Имя пользователя
Пароль
Запомнить меня
Создать учетную запись
Забыли имя пользователя?
Забыли пароль?
Комплектование определенных товаров для выполнения заказов клиентов является самой дорогостоящей складской операцией. Помимо сложности и большого количества ошибок, он требует очень много времени.
А так же тратить время на поиск нужного товара , люди-сборщики заказов обычно обнаруживают, что более половины их дня уходит на пешие прогулки (или поездки на самодвижущихся машинах) между пунктами комплектации и зонами упаковки.
Все, что делает процесс более плавным, быстрым и точным , может значительно сократить эксплуатационные расходы.
Еще одним важным фактором повышения скорости и эффективности является растущий спрос со стороны клиентов на доставку на следующий день или даже быстрее .
Центры выполнения заказов электронной коммерции, склады и другие предприятия, работающие для удовлетворения этих ожиданий, могут использовать AMR для комплектования и сортировки заказов, чтобы получить конкурентное преимущество.
AMR предлагают множество альтернативных подходов к традиционному комплектованию .
С одной стороны, существуют автономные роботы-сборщики предметов, которые фактически заменяют людей-сборщиков . Доехав до запрошенных предметов и найдя их, они используют манипулятор с всасывающим устройством на конце, чтобы забрать товары, поместить их в место для хранения на борту, а затем доставить на упаковочную станцию.
Другая стратегия состоит в том, чтобы сэкономить время на ходьбу путем доставки выбранных юнитов, содержащих запасы, человеку-сборщику. В этом подходе «товар к человеку » AMR приносят последовательность контейнеров или стеллажей сборщику, которому затем нужно только выбрать заказанные товары — часто с помощью систем с голосовым или световым управлением.
Для этой цели обычно используются тележки с нижней опорой, а другие возможности включают AMR с телескопическими вилами.
WELLWIT UNDER RIDE
ВИДЕО
О WELLWIT
WELLWIT UNDER RIDE
Shenzhen Wellwit robotics Co. , Ltd разрабатывает, производит и внедряет роботов для автоматизации логистики. Мы предлагаем мобильных роботов грузоподъемностью 500 кг и 1000 кг, идеально подходящих для складов, логистики электронной коммерции и производственных операций. Свяжитесь с поставщиком сейчас.
Подробнее
FlexQube eQart
ВИДЕО
О FlexQube
FlexQube eQart
Цель eQart® — предложить наиболее удобное решение для автоматизации. Сохраняя ДНК концепции FlexQube, клиенты могут использовать весь потенциал для создания самых разных размеров и индивидуальных конструкций верхней части.
Нажмите здесь, чтобы узнать больше о eQart®
Подробнее
Еще одна категория AMR была разработана для сбора предметов у сборщиков и доставки их на упаковочную станцию. В этом случае каждый комплектовщик заказов закрепляется за определенной зоной на складе, и ему не нужно перемещаться между зонами. AMR переходят от сборщика к сборщику, собирая предметы, необходимые для выполнения данных им заказов.
Гибкая сортировка AMR автоматизируют процесс направления определенных товаров в потоке к их правильным местам назначения в рамках операции. Сканирование штрих-кода или другие сенсорные системы используются для идентификации предметов, чтобы их можно было направить соответствующим образом.
В простейшем случае сортировочные AMR могут быть спроектированы для загрузки и выгрузки человеком. Для более автоматизированной работы некоторые из них оснащены роликовым или ленточным конвейером, который позволяет перемещать товары на другое транспортное оборудование и обратно или выгружать их в желоба или контейнеры.
Другой метод выгрузки — через наклонный лоток на AMR.
Существуют даже сортировочные AMR с роботизированными руками для сбора и выгрузки предметов.
Учитывая способность AMR автономно перемещаться, эти мобильные сортировочные роботы могут использоваться для перемещения продуктов между любым набором мест в операции, поэтому людям не нужно ходить или искать.
Их также можно использовать для автоматической сортировки элементов в оптимальной последовательности. Например, предметы для укладки на поддоны можно расположить так, чтобы самые тяжелые были внизу, а посылки для доставки можно расположить в порядке адреса.
2. Автономные мобильные роботы для очистки и дезинфекции
в результате пандемии Covid-19 .
Сегодня клиенты хотят быть уверены, что помещения гигиенически чисты . Помимо использования дезинфицирующих средств против болезнетворных организмов, компании также платят за то, чтобы их здания выглядели чистыми и производили хорошее впечатление.
AMR предлагают очень экономичный способ достижения этой цели путем развертывания автоматизированного оборудования для очистки и дезинфекции везде, где это необходимо.
Принимая во внимание сложную форму поверхностей и мебели любого здания, а также вероятность внезапного появления потенциальных препятствий, автономная навигация AMR жизненно важна в этих приложениях. Кроме того, его технология может гарантировать обработку каждого квадратного дюйма целевой области.
Автоматическая поломоечная машина удаляет видимую грязь и может применять моющие и дезинфицирующие средства для эффективной санитарной обработки. Некоторые оснащены распылительными устройствами для дезинфекции поверхностей выше уровня пола.
Для большей уверенности, есть роботы для дезинфекции. Они оснащены излучателем УФ-излучения , который, если указан для обеспечения правильной интенсивности, может эффективно убивать вирусы, бактерии и грибки в пределах нескольких метров от AMR, в том числе по вертикали.
WELLWIT UV ROBOT
ВИДЕО
О WELLWIT
WELLWIT UV ROBOT
Shenzhen Wellwit Robotics Disinfection предлагает мобильных роботов с пульсирующим светом, способных дезинфицировать опасные для заражения зоны в больницах, например, хирургические операционные, туалеты и т. д. Нажмите здесь, чтобы узнать Wellwit
Подробнее узнать больше, не забудьте скачать agvnetwork.com технический документ о роботах для УФ-дезинфекции . Просто зарегистрируйтесь (это бесплатно) и скачайте.
Имя пользователя
Пароль
Запомнить меня
Создать учетную запись
Забыли имя пользователя?
Забыли пароль?
Щелкните здесь, чтобы загрузить
9 (ASRous Security Robots)0028
Безопасность — это растущий рынок, который требует больших затрат труда. Автономные роботы-охранники (ASR) работают с существующим персоналом службы безопасности, численность которого в некоторых случаях может быть сокращена, чтобы заполнить пробелы в охвате и обеспечить гораздо более эффективное обслуживание.
Это изображение взято из инфографики agvnetwork.com о роботах безопасности. Вы можете скачать это здесь.
Оснащенные камерами , они обеспечивают непрерывный поток видео и данных в центр управления для контроля и принятия решений офицерами, находящимися там.
При необходимости ASR может быть переведен из автономного режима в режим дистанционного управления, чтобы офицер мог более внимательно рассмотреть все подозрительное. Все собранные видео и другие данные регистрируются и предоставляются для дальнейшего изучения и анализа.
С автономная навигация способность AMR, ASR могут выполнять патрулирование без необходимости вмешательства человека для преодоления препятствий или изменений в окружающей среде. Кроме того, искусственный интеллект (ИИ) позволяет им адекватно реагировать на различные события.
Это изображение взято из инфографики agvnetwork.com о роботах безопасности. Вы можете скачать это здесь.
Их сенсорные преимущества перед людьми могут включать инфракрасное зрение при слабом освещении и тепловое зрение , которые обнаруживают активность, невидимую человеческому глазу. Они также могут быть оснащены такими функциями, как распознавание лиц и номерных знаков.
Для различных сред доступны как внутренние, так и наружные ASR. Команды службы безопасности особенно приветствуют свое присутствие на удаленных или потенциально опасных объектах, а также во время длительных ночных смен. Помимо наблюдения, они действуют как визуальный сдерживающий фактор для преступников и даже могут быть запрограммированы на положительное взаимодействие с представителями общественности.
4. Автономные роботы в больницах и здравоохранении
Больницы также могут использовать AMR на внутреннем транспорте в отношении таких предметов, как питание, белье, лекарства, стерильные принадлежности, чистящее оборудование и отходы.
Одним из важных преимуществ этих AMR по сравнению с тележками, толкаемыми людьми, является то, что они сокращают число перемещений людей между зонами и, следовательно, вероятность распространения вирусов и бактерий через человека.
Связанный вопрос, который помогают решить AMR, – это прослеживаемость материалов и оборудования . Данные, собранные AMR о его местонахождении и деятельности, отправляются в систему управления AMR и связываются с отсканированными данными о маркированных контейнерах, которые он перевозит.
Ключевой задачей мобильных роботов в больницах является то, как справляться с присутствием большого количества пациентов и посетителей, поведение которых трудно предсказать. В то время как AGV обладают относительно небольшой способностью к осведомленности и взаимодействию, AMR могут быть оснащены для оценки ситуаций и безопасного реагирования.
В то время как больниц пытаются уложиться в ограниченные бюджеты и оказывать медицинскую помощь с ограниченными ресурсами, экономические аргументы в пользу AMR становятся все сильнее. Они могут значительно сократить общие расходы на заработную плату и в то же время высвободить персонал для выполнения более полезных задач, связанных с уходом за больными.
5. Роботы для гостиничного бизнеса
Предприятия гостиничного бизнеса, в том числе отелей, конференц-залов и ресторанов , особенно сильно пострадали от ограничений, связанных с Covid.
У гостиничных роботов есть несколько преимуществ: они дают возможность не только сократить затраты на рабочую силу, чтобы восстановить прибыльность, но и обеспечить безопасное и социально дистанцированное обслуживание клиентов.
Например, есть гостиничные роботы, которые доставляют еду, напитки и товары гостям в их номера или в места общего пользования.
Клиентам в текстовом сообщении отправляется PIN-код, с помощью которого можно открыть робота и получить доступ к своим заказам. Тот же принцип можно применить к услугам официантов и к доставке закусок в любом месте.
Для отеля ведение домашнего хозяйства , AMR заменяют те привычные большие тележки для уборки и стирки, которые имеют тенденцию загромождать коридоры. Уборка AMR курсирует по отелю, привозит свежие продукты по запросу и вывозит мусор и предметы для стирки в центральные пункты сбора, в то время как персонал выполняет свои обязанности в номере.
Домашние роботы автоматизируют внутреннюю обработку и транспортировку материалов в любой сфере гостеприимства. Наряду с едой и напитками это могут быть, например, скатерти, столовые приборы и посуда.
6. Автономные роботы в продуктовых магазинах
Конкуренция постоянно растет, и продуктовые магазины ищут пути повышения эффективности своей деятельности. В то же время социальное дистанцирование стало проблемой, которую необходимо учитывать во всех публичных деловых мероприятиях. Оба этих водителя проявляют повышенный интерес к возможности роботизированной помощи.
AMR продуктового магазина теперь доступны на рынке . Хотя мы находимся на довольно ранней стадии их разработки, а ранние модели, как правило, фокусируются только на одном или двух типах задач, вскоре мы должны увидеть расширяющийся выбор универсальных решений AMR.
Как всегда, автономная навигация является очень полезным атрибутом для роботов, работающих в сложных и часто быстро меняющихся пространствах в непосредственной близости от клиентов. ИИ — еще один важный актив, который обещает расширить роль AMR.
Одной из первоначальных задач было обнаружение разливов, предупреждение клиентов об этих потенциальных опасностях, связанных с поскользнуться, а в некоторых случаях и фактическое их удаление.
Приложения Back-of-shop включают поиск и извлечение контейнеров, из которых сотрудник может выбирать отдельные товары для выполнения онлайн-заказов клиентов. Это имеет много общего со сборкой заказов на складе, как обсуждалось в разделе 1.
Другим направлением, которое получает дальнейшее развитие, является работа, связанная с инвентаризацией . Существуют роботы, которые сканируют полки и сообщают о таких проблемах, как отсутствие товаров на складе, их расположение в неправильном месте или неверная цена.
Зная о продуктах и их местонахождении, AMR могут направлять клиентов к тому, что им нужно.
Одна компания фактически превратила AMR в тележки для покупок, которые следуют за покупателем по магазину и сканируют каждый собранный товар.
7. Последняя миля Доставка Автономные роботы
из быстрого роста E-Commerce и Resultivity Deliivations, ожидаемые. Секция 1 (Распределительные центры) создала стимул для дополнительной скорости и эффективности по всей цепочке поставок.
Одним из аспектов, требующих особого внимания, является доставка последней мили , что составляет более половины от общей стоимости доставки . Этому способствуют такие факторы, как сложность доставки и загруженность трафика.
Основная проблема, однако, заключается в том, что индивидуальная доставка каждого пакета очень дорогая по сравнению с оптовой доставкой, которая распределяет затраты на большое количество пакетов.
AMR предлагают различные подходы , чтобы сделать автономную автономную доставку «последней мили» быстрее и экономичнее. Если они должны предоставить универсальное решение, это может быть решение, объединяющее двух или более роботов для доставки посылки. Это связано с тем, что, в отличие от контролируемой среды распределительного центра, условия доставки «последней мили» чрезвычайно разнообразны.
Возьмем, к примеру, автономные фургоны для доставки. Помимо сложной задачи n по разумному и безопасному передвижению по дорогам общего пользования , они сталкиваются с проблемой, когда достигают намеченного адреса. Получатели ожидают, что посылки доставят через входную дверь, чего автономный транспорт сделать не может, особенно если адресат не живет на первом этаже.
Варианты могут включать вызов получателя, чтобы он спустился и забрал из фургона.
Для многоэтажных зданий, возможно, в будущем на каждый этаж будет доставляться специальный внутренний робот. В краткосрочной перспективе вполне вероятно, что более мелкие роботы, такие как упомянутые ниже дроны и тротуарные AMR, будут путешествовать на фургоне и завершать последнюю часть пути посылки.
В некоторых городских районах или районах кампуса с пешеходными дорожками и тихими дорогами можно использовать колесные или ножные AMR, известные как тротуарные капсулы. Колесные модели обладают большей устойчивостью, но AMR на ножках лучше справляются с более неровными поверхностями. Из-за своих небольших размеров и низкой скорости они не представляют угрозы безопасности.
Пересеченная местность не помеха для автономных дронов, которые составляют еще одну категорию AMR доставки. Они лучше всего подходят для сельской местности, так как городское небо создает много потенциальных препятствий и проблем с безопасностью.
Продолжайте учиться! Другие интересные статьи по теме:
Тенденции автоматизации основного склада — Знаете ли вы, каковы 7 основных тенденций автоматизации склада?
Применение AGV — где используются автоматизированные транспортные средства?
Автономные мобильные роботы на складе – AMR приносят огромные преимущества в распределительные центры электронной коммерции0003
Эта статья была написана Марком Николсоном для AGV NETWORK
Типы автономных роботов и их основные функции (2022) технологии постоянно совершенствуют способы использования автономных мобильных роботов (AMR).
И с этими улучшениями перспективы отрасли демонстрируют незначительные признаки замедления, и Business Wire прогнозирует глобальный CAGR (совокупный годовой темп роста) на уровне 15,12% в период с 2021 по 2026 год.
Однако когда дело доходит до AMR, существует несколько различных типов. Каждый из них может процветать в правильных условиях и барахтаться в неправильном приложении, поэтому определение правильного типа промышленных роботов для вас имеет решающее значение.
Что такое автономные мобильные роботы?
Автономные мобильные роботы — это машины, которые функционируют самостоятельно. Они работают в сотрудничестве и сожительствуют с людьми, и у них есть решения по обеспечению безопасности на борту, которые не позволяют им повредить конструкции.
Эти решения для обнаружения безопасности или обнаружения и обнаружения устройств называются LiDAR или «обнаружение света и определение дальности», — это решение с обзором на 360 градусов, которое ищет фиксированные препятствия (стойки, стойки, рабочие станции и т. д.) или переменные препятствия (люди, вилочные погрузчики и поддоны). LiDAR позволяет автономному роботу останавливаться и безопасно работать с окружающими людьми.
Что делает AMR уникальными по сравнению с некоторыми из их предшественников (такими как автоматизированные транспортные средства (AGV)), так это их картографические возможности. Они не только нанесут на карту весь объект, но и регулярно обновят эту карту, указав наиболее эффективные маршруты.
Например, если автономный мобильный робот выйдет из строя, он определит место на карте, где ему помешали, и, если он будет интегрирован с системой управления складом , автоматически перенаправит себя обратно на другой доступный ему путь. .
Еще одним преимуществом является то, что они постоянно следят за временем автономной работы. Если они понимают, что у них заканчивается заряд, они могут немедленно выйти из строя, приостановив свои текущие задачи в очереди и автоматически переключившись на зарядку. После зарядки автономный робот возобновит выполнение своих задач с того места, на котором остановился.
Короче говоря, AMR обладают более высоким уровнем интеллекта, чем предыдущий уровень технологий; они могут принимать решения о перенаправлении. Без человеческого контроля они могут решать, как выполнять свою работу, основываясь на том, что является оптимальным.
Почему AMR актуальны в 2022 году и какое влияние они оказали с момента создания?
Существует множество причин популярности AMR, но основными из них являются рост стоимости рабочей силы из-за сокращения числа рабочих, более жестких сроков доставки и технологических достижений.
Благодаря этим усовершенствованиям автономные мобильные роботы сильно изменились по сравнению с тем, что все изначально предполагали.
Мы видим в отрасли, что они оказывают меньшее влияние на процесс комплектования (как многие изначально ожидали) и больше используются в качестве транспортного средства.
В 2022 году использование AMR для процессов комплектования и горизонтальной транспортировки станет более общепринятым благодаря их эффективности и подтвержденной рентабельности инвестиций.
Вдобавок к этим двум типам, мобильные сортировочные роботы вызвали большой интерес.
Они перемещают роботизированные заказы, где у вас может быть много пунктов выдачи и множество отвлекающих пунктов назначения.
И если вы добавите физический конвейер или сортировочное решение типа обуви, у него будет слишком много входов и слишком много отводов для недорогого решения.
Типы автономных роботов
Роботы для совместной работы
Роботы для перевозки инвентаря
Масштабируемые роботы-сборщики
Автоматически управляемые транспортные средства (AGV)
1. Роботы для совместной работы
Источник изображения: GreyOrange
Наиболее распространенными автономными мобильными роботами являются роботы для совместной работы.
Некоторые примеры: Fetch Robotics , Otto Motors и GreyOrange .
Эти программируемые роботы предназначены для работы в приложениях по размещению, сбору, подсчету, пополнению и сортировке.
Они работают, получая загруженные заказы и отправляясь в указанное место комплектования, где находится оператор, принимающий комплект.
Затем оператор перемещается в это место и либо берет товар со склада и кладет его в робота, либо вытаскивает товар из робота и кладет его на полку, конвейер или стеллаж. Затем рабочий нажимает кнопку «завершить», приказывая роботу уйти и перевезти инвентарь в следующее место.
В этой ситуации AMR занимается горизонтальной транспортировкой продуктов или товаров по объекту, в то время как более сложные процессы, такие как сбор, сортировка или распаковка, выполняются работником.
Пешие прогулки обуславливают потребность в эквиваленте полной занятости (ЭПЗ) или людях и оборудовании. Чем больше требуется ходьбы, тем больше FTE требуется в вашей цепочке поставок.
Это приносит пользу компании и руководителям складов за счет сокращения пешеходных расстояний для рабочих, сокращения рабочего времени, которое работники тратят на поездки по объекту, повышения безопасности работников и удержания работников в более сложных и сложных задачах, тем самым сокращая общее количество необходимых ЭПЗ. .
Однако роботы для совместной работы имеют некоторые недостатки.
Во-первых, это решение не полностью избавляет рабочих от ходьбы, потому что они все равно должны найти роботов и перейти к этим решениям, чтобы вытащить необходимые предметы из робота.
Таким образом, это по-прежнему решение «человек-товар», а не «товар-человек».
Во-вторых, некоторые коботы могут не работать в определенных зонах из-за проблем с безопасностью сотрудников.
Последний недостаток заключается в том, что коботы сотрудничают друг с другом. Это означает, что они зависят от человеческого взаимодействия или помощи для выполнения задач и повышения эффективности вашей работы.
2. Роботы для перевозки инвентаря
Второй тип AMR транспортирует инвентарь и продукты внутри объекта.
Эти адаптивные роботы скорее заменяют куб, например Grey Orange или Geek Plus .
Роботы для перевозки запасов — это решение для обмена товарами с людьми, введенное для поддержки процессов комплектования на складах, поскольку транспортировка запасов из одного места в другое требует низкой квалификации.
Эти программируемые роботы собирают товары и приносят стеллажи с товаром работнику, в то время как работник остается на одном месте.
У них тут же есть несколько миниатюрных (по сравнению с традиционными стеллажами) стеллажей (КИВА называла их «контейнерами»; Grey Orange называет их «передвижными складскими единицами»), выстроенных в ряд таким образом, чтобы после того, как рабочий взял партию продукта со стеллажа , рабочий поворачивается, а робот перемещает другую стойку на ее место или поворачивает стойку в другую сторону для оптимального захвата.
Наиболее существенным недостатком этого решения является то, что оно оптимизировано только в том случае, если оно работает на одном уровне и не использует куб здания.
Другими словами, он занимает много квадратных метров, а не целый куб в здании.
Алгоритмы совершенствуются, а системы предназначены для самообучения. Они понимают, какие SKU перемещаются медленнее и быстрее, тем самым перетасовывая Pod хранения (передвижную полку), что сокращает расстояния, пройденные AMR, и сокращает время поиска.
Отлично, если у вас низкопрофильное здание — например, некоторые из старых зданий с клиренсом 12 или 14 футов хорошо там работают.
Однако, когда у вас 40-футовые потолки, а самая высокая стойка имеет высоту около 15 футов, вы не используете пространство над ней, потому что остается еще 25 футов вертикального пространства, которое можно использовать.
Есть много разных способов обойти это, и некоторые объекты накладывают мезонины друг на друга.
Источник изображения: Locus Robots
Этот тип решения, однако, является очень дорогостоящим мезонином с дорогостоящим этажом, а затем вам также необходимо иметь вертикальные подъемные устройства (лифты) для перемещения ботов между 2 или 3 уровнями, и есть много времени теряется в этом переходе.
Другой способ сделать это — выбрать только эти два уровня и отправить их в область консолидации заказов. Однако это добавляет штрихов.
3. Роботы-подборщики с масштабируемым хранилищем
Это еще одна версия, в которой робот-подборщик товаров к людям идет к месту подбора, извлекает из этого места сумку или коробку и передает ее оператору или роботизированным рукам. .
Эти роботы очень легко адаптируются, и некоторые из них будут взбираться на стеллажи, подъезжая к стойкам, прикрепляясь и масштабируя стеллаж, чтобы они могли вытащить из него код или коробку, вернуться вниз и доставить товар человеку.
Чтобы масштабируемые роботы работали должным образом, вашему предприятию потребуется специальная стойка и соответствующие размеры. Таким образом, вы должны учитывать стоимость не только роботов, но и инфраструктуры.
Недостатком этих адаптивных роботов является то, что вы, как правило, имеете дело с одной складской единицей (SKU) за раз, поэтому для достижения любой высокой пропускной способности требуется значительное количество автономных роботов.
4. Автоматически управляемые транспортные средства (AGV)
Источник изображения: Balyo
Автопогрузчики. Большие или объемные грузчики. Авто 1500с.
Проще говоря, они берут поддоны и перемещают их в другое место.
Однако существует широкий спектр операций для AGV .
Одно из применений, в котором я видел это, было в Канаде, где они перемещали коробки передач на сборочном заводе Toyota.
AGV были на приспособлении, которое перемещало эти трансмиссии в другую точку сборочной линии.
Обычно их используют для захвата поддонов в зоне приема и их транспортировки в зону резервного хранения.
Сегодня многие AGV могут быть переведены в ручное управление и использованы оператором при необходимости, и они выпускаются в нескольких типах моделей, таких как тележки для поддонов, ричтраки, тягачи и оборудование, используемое в очень узких проходах.
AGV существуют уже некоторое время, и несколько типов моделей охватывают почти все операции, необходимые от отправки до получения, транспортировки и хранения.
Основным недостатком AGV является их скорость работы. Из-за множества функций безопасности они движутся в среднем со скоростью 2 мили в час, в то время как средний оператор будет двигаться со скоростью до 15 миль в час при длительных поездках.
И хотя они могут работать в том же рабочем пространстве, что и другие операторы на вилочных погрузчиках, это не идеально из-за их более медленного темпа и большой занимаемой площади.
Каковы недостатки всех AMR?
У этих интеллектуальных роботов есть много преимуществ, но один существенный недостаток заключается в том, что они не так быстры, как человек, идущий по проходу, или кто-то на рации или ричтраке, едущий по проходу, просто из-за всех требований безопасности.
Большинство AMR предназначены для перевозки товаров меньшего размера, поэтому не хватает автономных роботов для перемещения негабаритных поддонов или компонентов производителя. Однако преимущества в том, что у них нет перерывов, у них нет выходных, у них нет выходных, им не нужен свет, и они могут работать, если у них есть электричество.
Это означает, что вы должны разработать систему, в которой постоянно есть работа, чтобы сделать ее полезной. Таким образом, вам, возможно, придется иметь несколько банков накопления на стороне получателя и элементы авансового отбора между этими операциями в резервных операциях.
Безопасность AMR
Хорошо, а как насчет безопасности? Может ли автономный робот сойти с ума и сбиться с курса или врезаться в стойку или сумку, если он блокирует путь? Что, если на объективе его камеры или датчиков есть пятно?
Как правило, предполагается, что они не видят того же изображения, которое они видели во время предыдущих поездок в определенные районы или при программировании. В этом случае они остановятся в этой точке и сообщат системе, что у них ошибка, и они либо будут сидеть там и подавать звуковой сигнал, пока кто-нибудь не придет и не исправит проблему, либо они перенаправят маршрут на ранее использовавшийся маршрут.
Заключение
Теперь, когда вы знаете типы автономных роботов, какой следующий шаг?
Если вы не знаете, с чего начать, сузьте круг вариантов, выбрав тип(ы), которые лучше всего подходят для вашего бизнеса.
Затем рассмотрите возможность посещения отраслевого эксперта для детального ознакомления с вашим предприятием и текущими системами.
ДЛЯ ЧЕГО ИСПОЛЬЗУЮТСЯ АВТОНОМНЫЕ РОБОТЫ?
Для улучшения рабочего времени, связанного с выполнением заказов или транспортировкой грузов.
ЧТО ЗНАЧИТ УПП?
Автономный мобильный робот
ЧТО ТАКОЕ СТАЦИОНАРНЫЙ РОБОТ?
Стационарный робот обычно представляет собой роботизированную руку, часто называемую «6-осевым роботом», потому что, как и человеческая рука, он имеет шарниры, которые могут вращаться. Это может быть портал, но порталы обычно перемещаются и не имеют осей вращения. Стационарные роботы-манипуляторы созданы для конкретных функциональных решений, которые остаются на одном месте. Как правило, вы приносите целый поддон с продуктами, и робот отбирает X ящиков и кладет их на другой конвейер, а затем вы отправляете остатки обратно по конвейеру. Или вы можете использовать транспортный конвейер AMR или транспортный робот обратно к месту хранения. Но механические руки берут ящики с паллетайзера и кладут некоторые на конвейер ящиков или наоборот, снимают ящики с конвейера ящиков и кладут их на поддон. Он укладывает их на поддоны. Это роботы с фиксированной рукой или роботы для захвата и размещения. Примером, который у нас есть, было бы решение для Verizon, где робот делал выбор. Мы приносили коробку или сумку, полную одного и того же артикула, мы сканировали ее, а робот с помощью вакуумных чашек подбирал сколько угодно или делал столько граммов, сколько им нужно было для выполнения партии заказов, и помещал их в сумки для заказов или заказать коробки, чтобы уйти, чтобы быть закрытым.
Маска сварщика Fubag Хамелеон OPTIMA 9-13 за 3089 руб.
Код: 3119950
Арт: 38072
В избранное
Сравнить
Поделиться
Видеоконсультация
0 в наличии
0 отзыв
Код: 3119950
Арт: 38072
Действительный цвет и текстура могут отличаться от картинки
0 в наличии
3 089 ₽/шт
RUB
Купить в кредит
?
Выберите способ оплаты «Онлайн-кредит» в корзине и заполните заявку. Банк ответит
через несколько минут.
Подробнее
Добавить в корзину
Цена действительна только для интернет-магазина
Способы получения
Самовывоз: 22.01 (8:00 — 22:00) бесплатно
Уточнить условия доставки
Доставка: 22.01 (9:00 — 21:00) от 550₽
Описание
Fubag OPTIMA 9-13 — сварочная маска, которая рекомендована для работы в различных режимах сварки (MMA, MIG/MAG, TIG). Оптимальные характеристики и невысокая стоимость делают ее идеальным выбором для тех, кто ищет надежное средство защиты глаз от светового излучения в видимой части спектра. Усовершенствованный механизм регулировки позволяет настраивать угол наклона, сдвига вперед/назад и размер. Светофильтр «Хамелеон», технология Natural Color. Зона обзора – 95×36 мм. Диапазон светопропускания — 9-13 DIN. Количество сенсоров – 2 шт. Режимы Сварка/Шлифовка. Плавная настройка чувствительности и степени затемнения. Выполнена из ударопрочного полиамида.
Характеристики
Основные
Весогабаритные
Параметры упаковки
Вид упаковки
картонная коробка
Длина упаковки, м
0,29
Ширина упаковки, м
0,23
Высота упаковки, м
0,23
Вес в упаковке, кг
0,774
Сертификаты
Смотреть сертификат
Похожие товары
5 в наличии
Маска сварщика Patriot WH 300
2 090 ₽/шт
RUB
3 в наличии
Маска сварщика Fubag Хамелеон OPTIMA 11
2 559 ₽/шт
RUB
2 в наличии
Маска сварщика Fubag Хамелеон ULTIMA 11
2 990 ₽/шт
RUB
0 в наличии
Маска сварщика Fubag Хамелеон ULTIMA 9-13
4 147 ₽/шт
RUB
1 в наличии
Маска сварщика Ресанта МС-5
3 290 ₽/шт
RUB
4 в наличии
Маска сварщика Ресанта МС-3
2 590 ₽/шт
RUB
11 в наличии
Маска сварочная QE LAMBDA
700 ₽/шт
RUB
7 в наличии
Маска сварочная QE GAMMA, хамелеон
1 890 ₽/шт
RUB
7 в наличии
Маска сварщика с автоматическим светофильтром, хамелеон
1 199 ₽/шт
RUB
57 в наличии
Маска сварщика Ресанта МС-6
940 ₽/шт
RUB
24 в наличии
Маска сварщика Ресанта МС-1
1 540 ₽/шт
RUB
10 в наличии
Маска сварочная QE DELTA, хамелеон
1 664 ₽/шт
RUB
23 в наличии
Маска сварщика Ресанта МС-4
1 190 ₽/шт
RUB
Маски Fubag Optima 9.
13 хамелеон в Омске
Каталог
Маска сварщика FUBAG Хамелеон OPTIMA 9-13
в магазин
Маска сварщика хамелеон FUBAG OPTIMA 9.13 RED
в магазин
Маска сварщика хамелеон FUBAG OPTIMA TEAM 9-13 SILVER
в магазин
Маска сварщика хамелеон FUBAG OPTIMA TEAM 9-13 RED
в магазин
Маска сварщика Fubag Optima 9-13, светофильтр хамелеон, степень затемнения 9 DIN-13 DIN, смотровое окно 36×95 мм (38072)
в магазин
хамелеон Маска сварщика FUBAG «Хамелеон» ULTIMA 9-13 Optima 9.13
 5
5 /мин.
/мин.
 5
5

 83
83
 ..
.. ..
.. ..
.. ..
.. Gardena производит арматуру для систем полива, садовый инвентарь, газонокосилки, а также бытовые насосы и насосные станции.
Gardena производит арматуру для систем полива, садовый инвентарь, газонокосилки, а также бытовые насосы и насосные станции. Реле давления, установленное в данном агрегате, автоматически контролирует уровень давления в резервуаре для воды. При уменьшении количества жидкости в баке включается насос, который наполняет бак до уровня, необходимого для подачи жидкости под давлением. При этом давление в гидроаккумуляторе можно регулировать до нужных вам параметров, тем самым изменяя напор подаваемой воды.
Реле давления, установленное в данном агрегате, автоматически контролирует уровень давления в резервуаре для воды. При уменьшении количества жидкости в баке включается насос, который наполняет бак до уровня, необходимого для подачи жидкости под давлением. При этом давление в гидроаккумуляторе можно регулировать до нужных вам параметров, тем самым изменяя напор подаваемой воды. Вода поступает в устройство с помощью трубы, опущенной в колодец или колодец.
Вода поступает в устройство с помощью трубы, опущенной в колодец или колодец.

 Лучше выбирать устройства с защитой от перегрева и сухого хода. Они остановят работу устройства, если на него не подается жидкость, а также в том случае, если температура привода превысит допустимые параметры.
Лучше выбирать устройства с защитой от перегрева и сухого хода. Они остановят работу устройства, если на него не подается жидкость, а также в том случае, если температура привода превысит допустимые параметры. Экосистема в устройстве отсутствует.
Экосистема в устройстве отсутствует. Поэтому, если вы устанавливаете насосную станцию в жилом доме, то помещение, где будет располагаться агрегат, потребует дополнительного утепления. Стоимость модели Gardena 4000/5 Comfort около 23 000 рублей.
Поэтому, если вы устанавливаете насосную станцию в жилом доме, то помещение, где будет располагаться агрегат, потребует дополнительного утепления. Стоимость модели Gardena 4000/5 Comfort около 23 000 рублей.


 В шпинделе установлены высокоточные подшипники компании NSK (Япония).
В шпинделе установлены высокоточные подшипники компании NSK (Япония).
 /30 мин.), кВт
/30 мин.), кВт Сервис по всей России, запасные части в наличии на складах. Для удобства оператора стойка снабжена маховиком ручного управления.
Сервис по всей России, запасные части в наличии на складах. Для удобства оператора стойка снабжена маховиком ручного управления.




 Работа с KTL Solutions означает, что наш успех полностью зависит от вашего.
Работа с KTL Solutions означает, что наш успех полностью зависит от вашего. Вуаля – модель для 3d печати готова. Достаточно залечить, например в netfabb.
Вуаля – модель для 3d печати готова. Достаточно залечить, например в netfabb.

 Мы ожидаем, что промышленные компании также выиграют от преимуществ нашего 3D-принтера для микродеталей, созданного преодолевать ограничения и сокращать время вывода продукции на рынок».
Мы ожидаем, что промышленные компании также выиграют от преимуществ нашего 3D-принтера для микродеталей, созданного преодолевать ограничения и сокращать время вывода продукции на рынок».
 Российская противобатарейная радиолокационная система.
Российская противобатарейная радиолокационная система.
 dwg) AutoCAD (собственный) (.ma) Maya (.lwo / lws) Lightwave (.xsi) Softimage XSI (.3dm) Rhinoceros (.stl) Stereolithography (.iges) IGES (.step) STEP (.blend) Blender (.skp ) SketchUp(.jpg) Текстуры изображений(.png) Текстуры изображений3DS MAX(.max) 3DS MAX вер.2022(.max) 3DS MAX вер.2021(.max) 3DS MAX вер.2020(.max) 3DS MAX вер. 2019(.max) 3DS MAX ver.2018(.max) 3DS MAX ver.2017(.max) 3DS MAX ver.2016(.max) 3DS MAX ver.2015(.max) 3DS MAX ver.2014(.max) 3DS MAX вер.2013(.max) 3DS MAX вер.2012(.max) 3DS MAX вер.2011(.max) 3DS MAX вер.2010(.max) 3DS MAX вер.2009(.max) 3DS MAX вер.2008( .max) 3DS MAX ver.9(.max) 3DS MAX ver.8(.max) 3DS MAX ver.7(.max) 3DS MAX ver.6(.max) 3DS MAX ver.5(.max) 3DS MAX версия 4(.max) 3DS MAX версия 3(.max) 3DS MAX(.3ds) 3DS MAX все версии Cinema4D(.c4d) Cinema4D(.c4d) Cinema4D r21(.c4d) Cinema4D r20(.c4d) Cinema4D р19(.c4d) Cinema4D r18(.c4d) Cinema4D r17(.c4d) Cinema4D r16(.c4d) Cinema4D r15(.c4d) Cinema4D r14(.c4d) Cinema4D r13(.c4d) Cinema4D r12(.c4d) Cinema4D r11(.
dwg) AutoCAD (собственный) (.ma) Maya (.lwo / lws) Lightwave (.xsi) Softimage XSI (.3dm) Rhinoceros (.stl) Stereolithography (.iges) IGES (.step) STEP (.blend) Blender (.skp ) SketchUp(.jpg) Текстуры изображений(.png) Текстуры изображений3DS MAX(.max) 3DS MAX вер.2022(.max) 3DS MAX вер.2021(.max) 3DS MAX вер.2020(.max) 3DS MAX вер. 2019(.max) 3DS MAX ver.2018(.max) 3DS MAX ver.2017(.max) 3DS MAX ver.2016(.max) 3DS MAX ver.2015(.max) 3DS MAX ver.2014(.max) 3DS MAX вер.2013(.max) 3DS MAX вер.2012(.max) 3DS MAX вер.2011(.max) 3DS MAX вер.2010(.max) 3DS MAX вер.2009(.max) 3DS MAX вер.2008( .max) 3DS MAX ver.9(.max) 3DS MAX ver.8(.max) 3DS MAX ver.7(.max) 3DS MAX ver.6(.max) 3DS MAX ver.5(.max) 3DS MAX версия 4(.max) 3DS MAX версия 3(.max) 3DS MAX(.3ds) 3DS MAX все версии Cinema4D(.c4d) Cinema4D(.c4d) Cinema4D r21(.c4d) Cinema4D r20(.c4d) Cinema4D р19(.c4d) Cinema4D r18(.c4d) Cinema4D r17(.c4d) Cinema4D r16(.c4d) Cinema4D r15(.c4d) Cinema4D r14(.c4d) Cinema4D r13(.c4d) Cinema4D r12(.c4d) Cinema4D r11(. c4d) Cinema4D r10(.c4d) Cinema4D r9Maya(.mb) Maya 2018(.mb) Maya 2017(.mb) Maya 2016(.mb) Maya 2015(.mb) Maya 2014(.mb) Maya 2013(.mb) Maya 2012(.mb) Maya 2011(.mb) Maya 2010(.mb) Maya 2009(.mb) Maya 2008(.mb) Maya 8.5(.mb) Maya 8(.mb) Maya(.ma) MayaLightwave(. lwo / lws) Lightwave вер. 11.6(.lwo / lws) Lightwave вер. 11,5(.lwo / lws) Lightwave вер. 9(.lwo / lws) Lightwave вер. 8(.lwo / lws) Lightwave вер. 7Softimage(.xsi) Softimage 7.5(.xsi) Softimage 7(.xsi) Softimage 6(.xsi) Softimage XSIImage Textures(.jpg) Image Textures(.png) Image Textures(.psd) Adobe Photoshop(.hdr) Image Textures (.exr) Текстуры изображений (.tif) Текстуры изображений (.tga) Текстуры изображений (.gif) Текстуры изображений (.svg) Текстуры изображений (.psp) Paint Shop Pro (.i3d) Houdini Image 3D Fileother (.sat) ACIS (.rvt) Autodesk Revit (.rfa) Autodesk Revit Family (.iam) Autodesk Inventor IAM (.ipt) Autodesk Inventor IPT, (.gsm) ArchiCAD GSM (.lcf) ArchiCAD Librry Файл-контейнер (.pla) PLA (.pln) ) PLN(.ls) Lumion 3D(.
c4d) Cinema4D r10(.c4d) Cinema4D r9Maya(.mb) Maya 2018(.mb) Maya 2017(.mb) Maya 2016(.mb) Maya 2015(.mb) Maya 2014(.mb) Maya 2013(.mb) Maya 2012(.mb) Maya 2011(.mb) Maya 2010(.mb) Maya 2009(.mb) Maya 2008(.mb) Maya 8.5(.mb) Maya 8(.mb) Maya(.ma) MayaLightwave(. lwo / lws) Lightwave вер. 11.6(.lwo / lws) Lightwave вер. 11,5(.lwo / lws) Lightwave вер. 9(.lwo / lws) Lightwave вер. 8(.lwo / lws) Lightwave вер. 7Softimage(.xsi) Softimage 7.5(.xsi) Softimage 7(.xsi) Softimage 6(.xsi) Softimage XSIImage Textures(.jpg) Image Textures(.png) Image Textures(.psd) Adobe Photoshop(.hdr) Image Textures (.exr) Текстуры изображений (.tif) Текстуры изображений (.tga) Текстуры изображений (.gif) Текстуры изображений (.svg) Текстуры изображений (.psp) Paint Shop Pro (.i3d) Houdini Image 3D Fileother (.sat) ACIS (.rvt) Autodesk Revit (.rfa) Autodesk Revit Family (.iam) Autodesk Inventor IAM (.ipt) Autodesk Inventor IPT, (.gsm) ArchiCAD GSM (.lcf) ArchiCAD Librry Файл-контейнер (.pla) PLA (.pln) ) PLN(.ls) Lumion 3D(. tcw) TurboCAD(.lxo) Luxology Modo(.w3d) Shockwave3D(.r3d) Realsoft 3D(.bip) Hypershot(.zpr) ZBrach(.vue) Vue(.vob) Bentley Eon Vue(.vdb) DreamWorks Animation OpenVDB(.tpf) PlantFactory(.3b) 3D Coat(.jas) Cheetah4D(.ply) Agisoft Photoscan(.m3d) КОМПАС 3D(.ms3d) MilkShape 3D(.gmf) Leaderwerks(. dbo) DarkBASIC Object(.dts) Torque(.dff) Zanoza ZModeler 3(.b3d) Beyond3D(.rh) Deep Exploration(.sldprt) SolidWorks(.prt) Creo 4 (файл детали)(.dae) Collad тип файла (.ocs) Octane Render (.pdf) Portable Document Format (.doc) Microsoft Word (.mpg) MPEG (.avi) Video (.mp4) Video (.zprj) CLO3D Project File (.jcad/.jcd ) Jewelry Cad(.vox) MagicaVoxel(.ifc) Интерполярность BIM(.x) DirectX(.wrl) VRML Worlds(.unitypack) Unity 3D(.uasset) Unreal Engine(.psmodel) PowerShape(.pdo) Pepakura Designer 4( .x_t) Parasolid (.ksp) Keyshot (.glb / .gltf) Формат передачи GL (.catpart / .catproduct) CATIA (.abc) Alembic (.py) Python (.fbm) FreeShip (.art) ARTCam (.jrs) ) T-Flex.cad(.tm) Twinmotion(.duf) DAZ Studio
tcw) TurboCAD(.lxo) Luxology Modo(.w3d) Shockwave3D(.r3d) Realsoft 3D(.bip) Hypershot(.zpr) ZBrach(.vue) Vue(.vob) Bentley Eon Vue(.vdb) DreamWorks Animation OpenVDB(.tpf) PlantFactory(.3b) 3D Coat(.jas) Cheetah4D(.ply) Agisoft Photoscan(.m3d) КОМПАС 3D(.ms3d) MilkShape 3D(.gmf) Leaderwerks(. dbo) DarkBASIC Object(.dts) Torque(.dff) Zanoza ZModeler 3(.b3d) Beyond3D(.rh) Deep Exploration(.sldprt) SolidWorks(.prt) Creo 4 (файл детали)(.dae) Collad тип файла (.ocs) Octane Render (.pdf) Portable Document Format (.doc) Microsoft Word (.mpg) MPEG (.avi) Video (.mp4) Video (.zprj) CLO3D Project File (.jcad/.jcd ) Jewelry Cad(.vox) MagicaVoxel(.ifc) Интерполярность BIM(.x) DirectX(.wrl) VRML Worlds(.unitypack) Unity 3D(.uasset) Unreal Engine(.psmodel) PowerShape(.pdo) Pepakura Designer 4( .x_t) Parasolid (.ksp) Keyshot (.glb / .gltf) Формат передачи GL (.catpart / .catproduct) CATIA (.abc) Alembic (.py) Python (.fbm) FreeShip (.art) ARTCam (.jrs) ) T-Flex.cad(.tm) Twinmotion(.duf) DAZ Studio
 Переключение с Design на другое рабочее пространство также приводило к подобному эффекту. Этот алгоритм был изменен. Теперь, когда вы входите и выходите из Edit-in-Place без какого-либо фактического моделирования или переключения на другое рабочее пространство, проект будет оставаться неизменным.
Переключение с Design на другое рабочее пространство также приводило к подобному эффекту. Этот алгоритм был изменен. Теперь, когда вы входите и выходите из Edit-in-Place без какого-либо фактического моделирования или переключения на другое рабочее пространство, проект будет оставаться неизменным.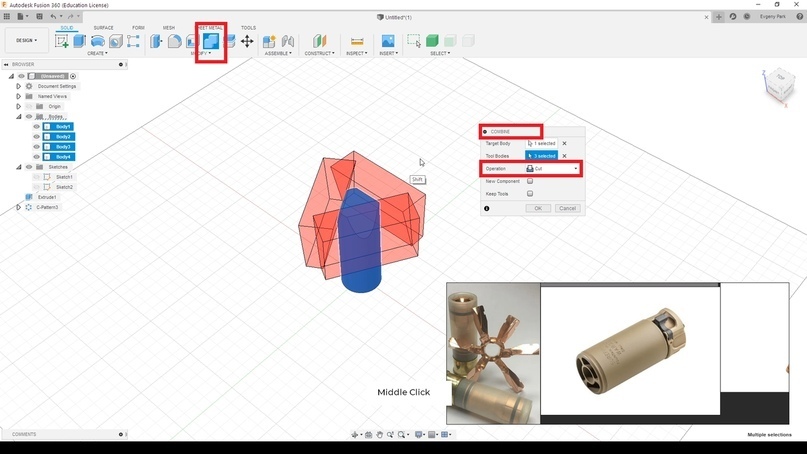
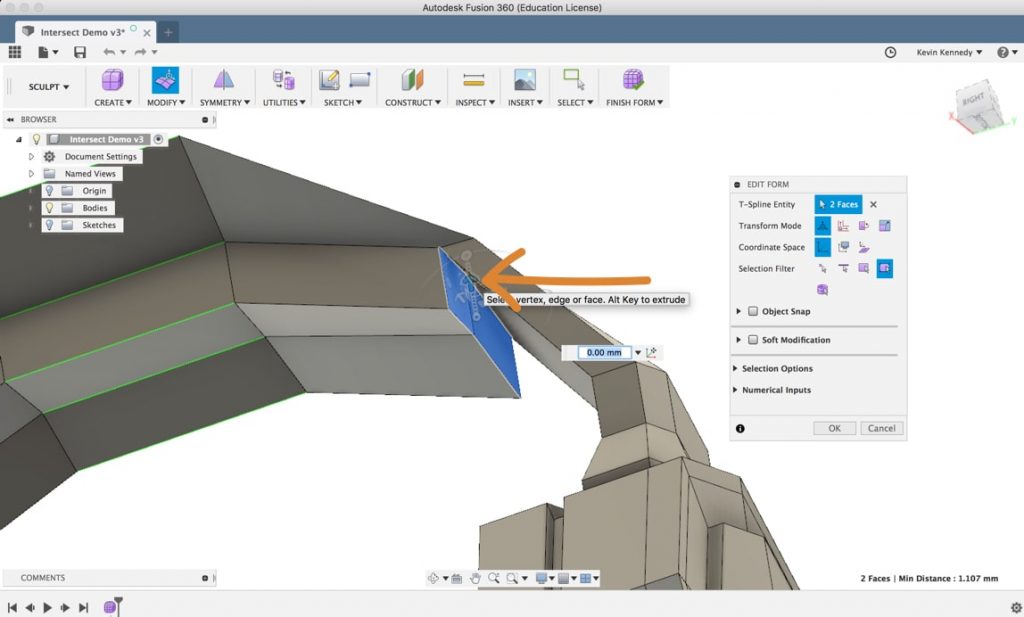 Изменение значения данного параметра приведет к изменению кривизны касательности сопряжения, что позволит точно настроить геометрию сопряжения.
Изменение значения данного параметра приведет к изменению кривизны касательности сопряжения, что позволит точно настроить геометрию сопряжения.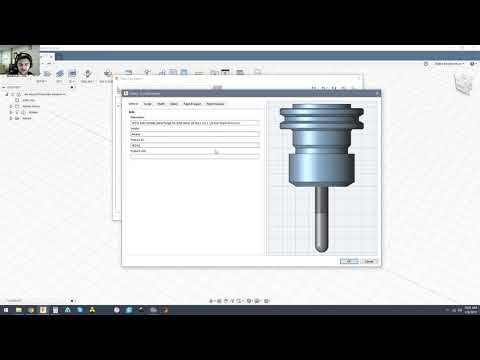 Теперь в диалоговом окне Package Generator у вас есть возможность выбрать использование соответствия IPC или настроить параметр посадочного места без ущерба для деталей 3D-модели. Есть некоторые преимущества изменения размера контактной площадки, например, увеличение площади контактной площадки для ручной пайки или уменьшение ее размера из-за ограниченного пространства. Эта функция в настоящее время поддерживается в шаблонах SOIC, Chip, SOD и Molded Body. В будущих обновлениях будет добавлено больше возможностей.
Теперь в диалоговом окне Package Generator у вас есть возможность выбрать использование соответствия IPC или настроить параметр посадочного места без ущерба для деталей 3D-модели. Есть некоторые преимущества изменения размера контактной площадки, например, увеличение площади контактной площадки для ручной пайки или уменьшение ее размера из-за ограниченного пространства. Эта функция в настоящее время поддерживается в шаблонах SOIC, Chip, SOD и Molded Body. В будущих обновлениях будет добавлено больше возможностей.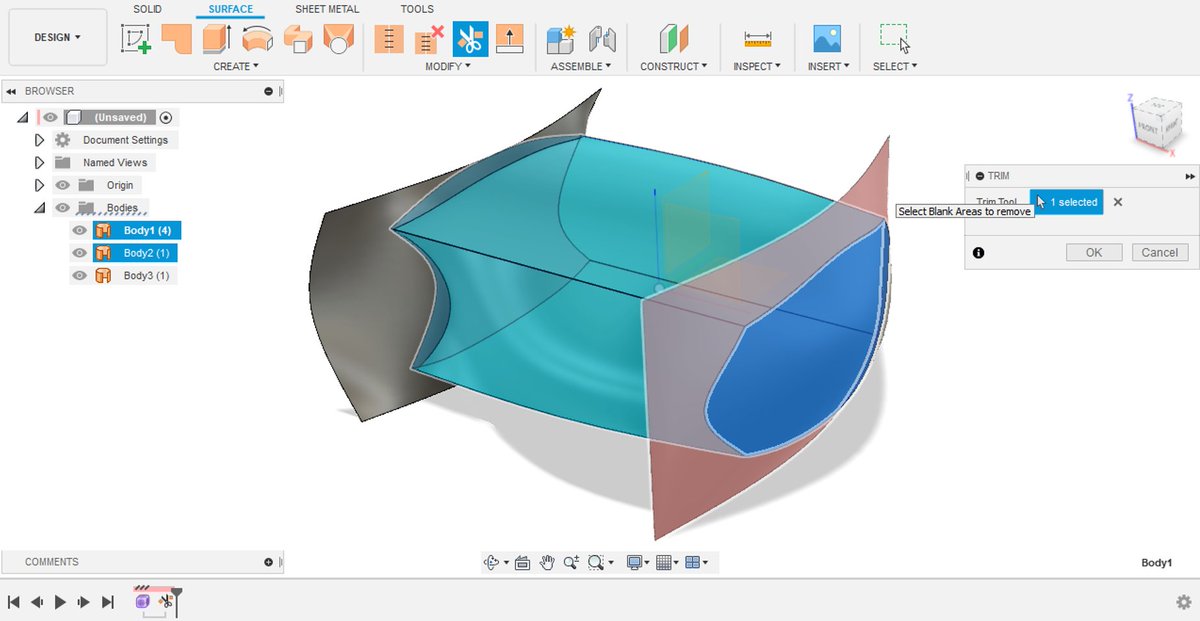 Обычно готовые проекты переделываются и адаптируются к обновлению продукта. Связь существующих проектов с новыми может привести к проблемам согласованности исходного проекта при добавлении новых компонентов или соединений. В диалоговое окно Reference to добавлена опция Create a Copy, которая защитит целостность оригинального дизайна.
Обычно готовые проекты переделываются и адаптируются к обновлению продукта. Связь существующих проектов с новыми может привести к проблемам согласованности исходного проекта при добавлении новых компонентов или соединений. В диалоговое окно Reference to добавлена опция Create a Copy, которая защитит целостность оригинального дизайна.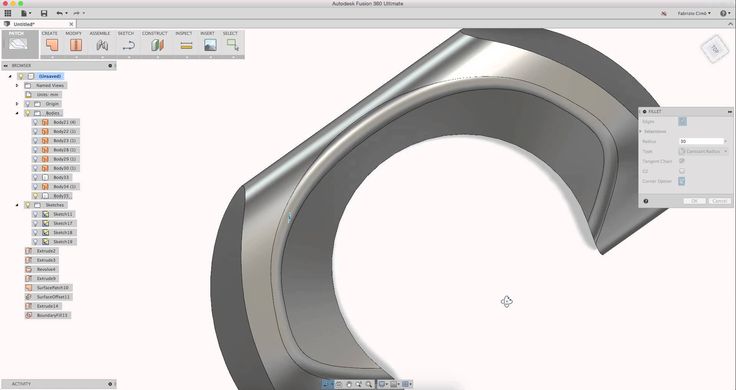

 Ограничение симметрии поддерживается для 3- и 5-осевого фрезерования.
Ограничение симметрии поддерживается для 3- и 5-осевого фрезерования. Это могло привести к неверному представлению о том, как воздух перемещается вентилятором.
Это могло привести к неверному представлению о том, как воздух перемещается вентилятором.
 Однако, если в какой-то момент вы вернетесь в рабочую область Design и внесете изменения в исходную модель, эти изменения будут перенесены на все существующие и будущие производственные модели.
Однако, если в какой-то момент вы вернетесь в рабочую область Design и внесете изменения в исходную модель, эти изменения будут перенесены на все существующие и будущие производственные модели. Это лучший способ автоматизировать программирование.
Это лучший способ автоматизировать программирование.

 В библиотеке постпроцессоров также есть постпроцессор для данного типа принтеров, поэтому пользователи могут настраивать печать и генерировать g-код для своих машин.
В библиотеке постпроцессоров также есть постпроцессор для данного типа принтеров, поэтому пользователи могут настраивать печать и генерировать g-код для своих машин. Разработчики добавили несколько разделителей и реорганизовали их, чтобы они лучше подходили для настройки аддитивного производства с принтерами для печати металлическим порошком.
Разработчики добавили несколько разделителей и реорганизовали их, чтобы они лучше подходили для настройки аддитивного производства с принтерами для печати металлическим порошком.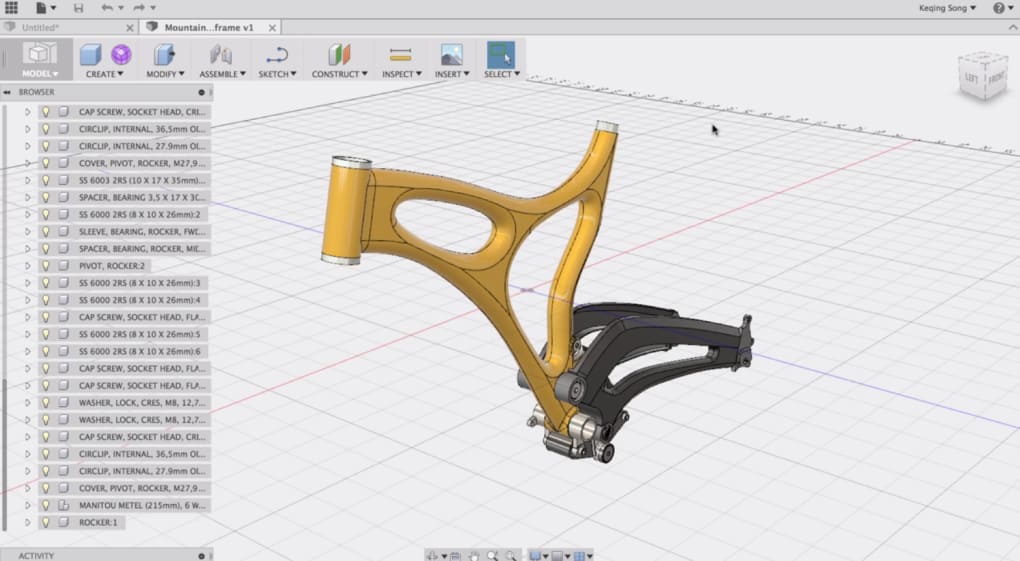
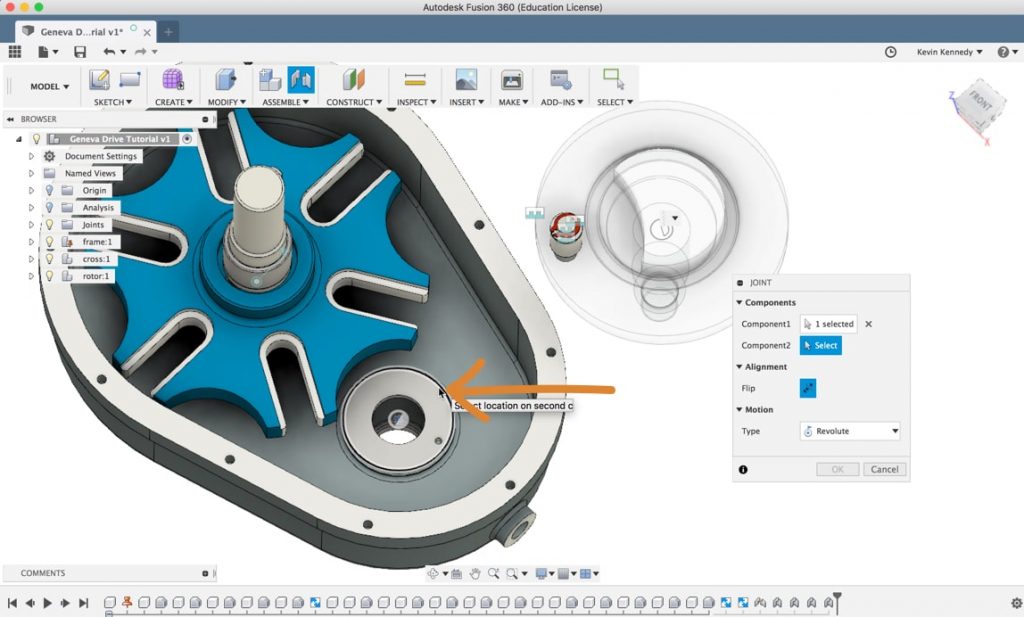 Разместить его можно на любой плоскости по трём осям, придав любую форму. В случае с пулей мы создаём круг на плоскости X, Y: из него мы затем сможем сделать solid-объект. Нажимаем в открывшейся панели Solid на инструмент Extrude, и с помощью него вытягиваем solid-объект нужной нам высоты.
Разместить его можно на любой плоскости по трём осям, придав любую форму. В случае с пулей мы создаём круг на плоскости X, Y: из него мы затем сможем сделать solid-объект. Нажимаем в открывшейся панели Solid на инструмент Extrude, и с помощью него вытягиваем solid-объект нужной нам высоты.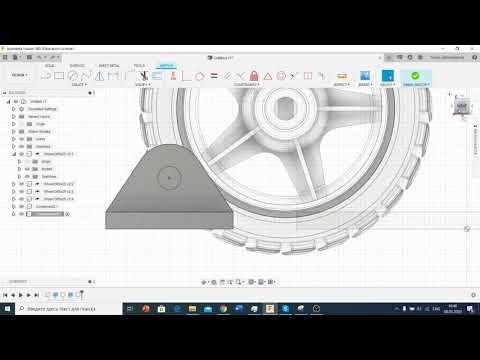 Чтобы вытянуть объект в обе стороны, выбираем в меню Symmetric, и с помощью опции Cut отрезаем часть ранее созданного solid-объекта.
Чтобы вытянуть объект в обе стороны, выбираем в меню Symmetric, и с помощью опции Cut отрезаем часть ранее созданного solid-объекта.
 Этот способ позволит не просто выдавить объект, а сделать плавный переход из одной формы в другую.
Этот способ позволит не просто выдавить объект, а сделать плавный переход из одной формы в другую.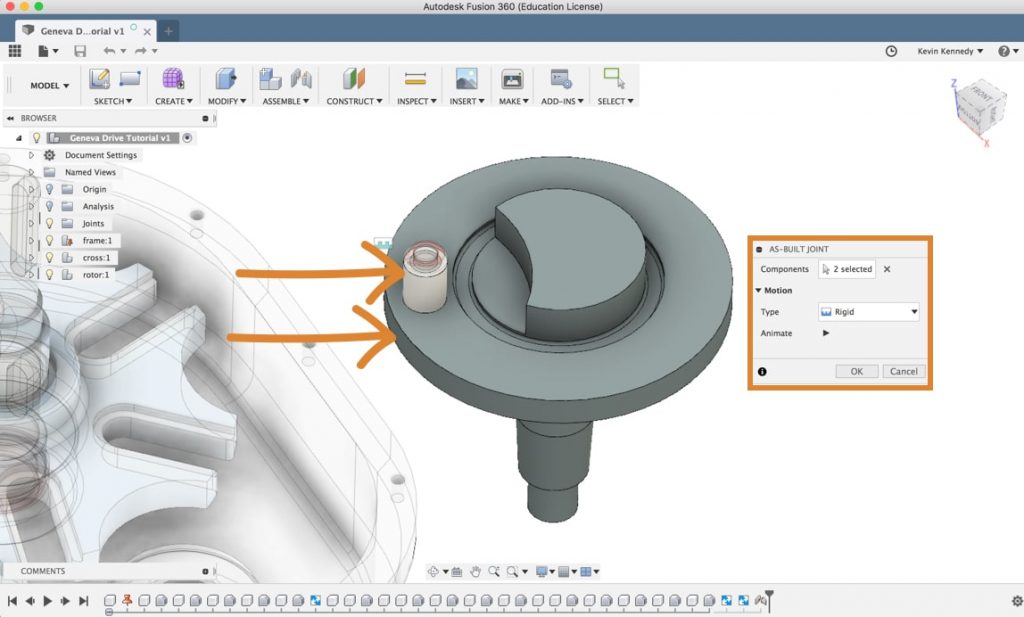
 Исправляем это, применив Fillet к верхней звезде.
Исправляем это, применив Fillet к верхней звезде.

 Перейдите к следующему шагу…
Перейдите к следующему шагу…
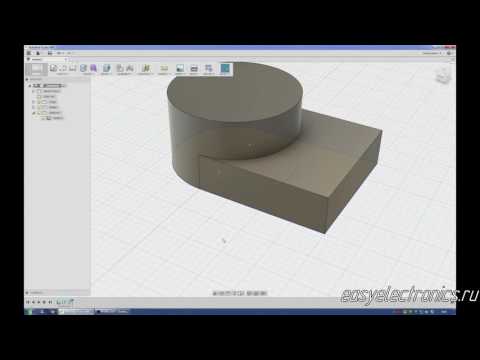 Прежде чем смотреть это видео, вы должны знать, что это руководство предназначено для пользователей среднего уровня или тех, кто понимать основные функции Fusion 360. Поэтому вам необходимо настроить эталонное изображение в соответствии с приведенными ниже инструкциями.
Прежде чем смотреть это видео, вы должны знать, что это руководство предназначено для пользователей среднего уровня или тех, кто понимать основные функции Fusion 360. Поэтому вам необходимо настроить эталонное изображение в соответствии с приведенными ниже инструкциями.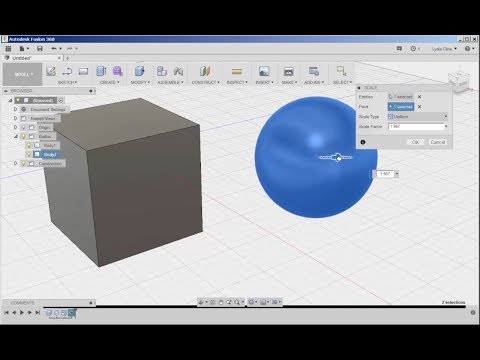
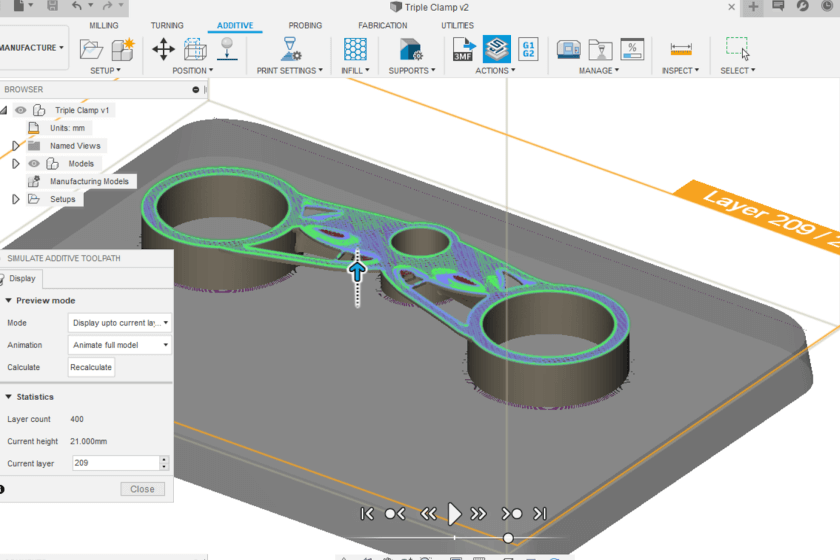 Прежде чем мы начнем, вы должны знать что это руководство предназначено для пользователей среднего уровня или тех, кто понимает основные функции Fusion 360. Поэтому я не буду подробно рассказывать вам о каждой мелочи, например о настройке эталонного изображения.
Прежде чем мы начнем, вы должны знать что это руководство предназначено для пользователей среднего уровня или тех, кто понимает основные функции Fusion 360. Поэтому я не буду подробно рассказывать вам о каждой мелочи, например о настройке эталонного изображения.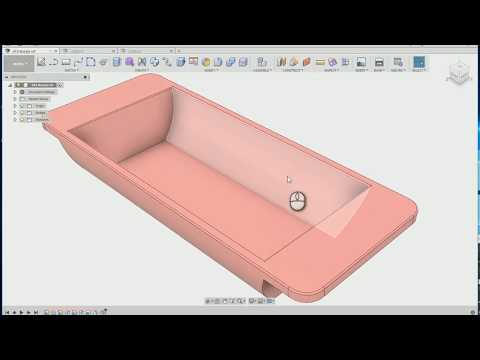 Я не буду освещать какие-либо внутренние компоненты.
Я не буду освещать какие-либо внутренние компоненты.

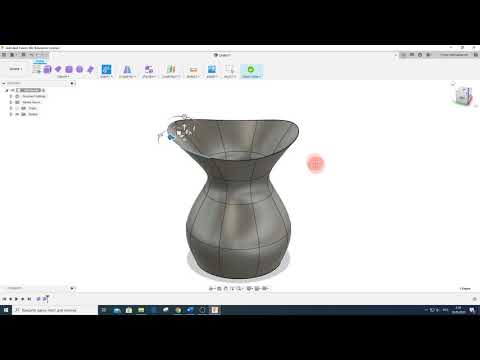 Важная вещь с этим сплайном заключается в том, что мы хотим убедиться, что мы выходим за границу поверхности верхней части сушилки, поскольку мы намеренно создадим эту ручку, торчащую через верхнюю часть корпуса. Мы делаем это, чтобы затем обрезать его, что является обычной практикой и концепцией, которую вам необходимо понять, чтобы стать лучше в моделировании поверхностей.
Важная вещь с этим сплайном заключается в том, что мы хотим убедиться, что мы выходим за границу поверхности верхней части сушилки, поскольку мы намеренно создадим эту ручку, торчащую через верхнюю часть корпуса. Мы делаем это, чтобы затем обрезать его, что является обычной практикой и концепцией, которую вам необходимо понять, чтобы стать лучше в моделировании поверхностей.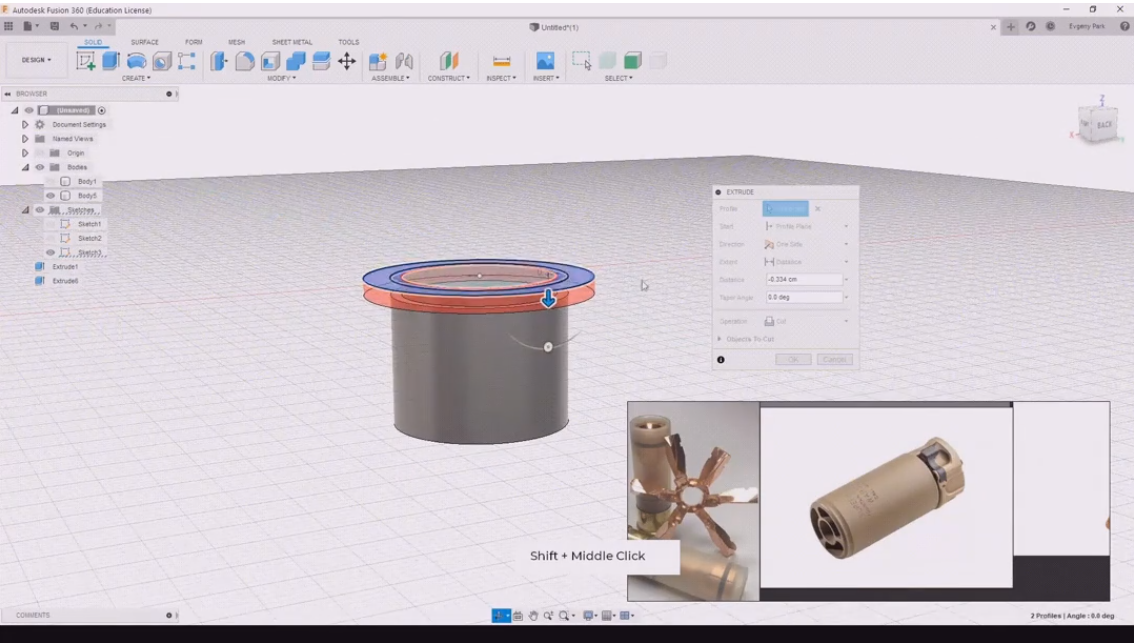 Я хочу, чтобы эта нижняя ручка сплайна имела горизонтальное ограничение, потому что это гарантирует, что у этих частей не будет выемки или странной полости, когда грани сходятся внизу.
Я хочу, чтобы эта нижняя ручка сплайна имела горизонтальное ограничение, потому что это гарантирует, что у этих частей не будет выемки или странной полости, когда грани сходятся внизу.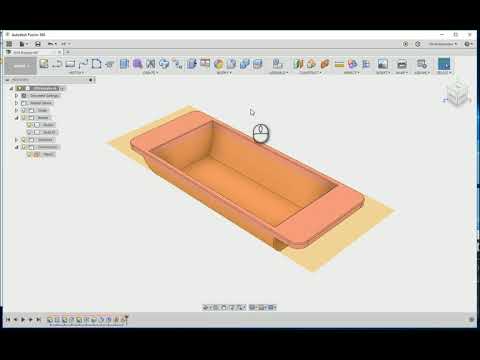 Если вы хотите увидеть больше учебных пособий среднего уровня, прокомментируйте аббревиатуру «INT» заглавными буквами ниже… и если вы предпочитаете учебные пособия для начинающих, прокомментируйте аббревиатуру «BEG» ниже.
Если вы хотите увидеть больше учебных пособий среднего уровня, прокомментируйте аббревиатуру «INT» заглавными буквами ниже… и если вы предпочитаете учебные пособия для начинающих, прокомментируйте аббревиатуру «BEG» ниже.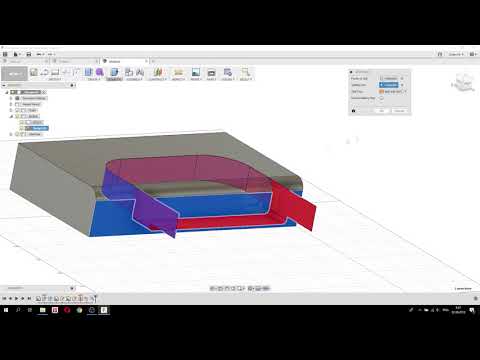

 Я выберу вкладку «Поверхность», а затем найду команду «Лофт» в раскрывающемся списке «Создать». В противном случае, если вы воспользуетесь полем быстрого доступа, вы увидите, что оранжевый цвет будет отличать поверхностный лофт от твердого лофта.
Я выберу вкладку «Поверхность», а затем найду команду «Лофт» в раскрывающемся списке «Создать». В противном случае, если вы воспользуетесь полем быстрого доступа, вы увидите, что оранжевый цвет будет отличать поверхностный лофт от твердого лофта. Наконец, давайте нажмем «ОК».
Наконец, давайте нажмем «ОК». Выберите оба ребра в качестве профилей и горизонтальный шлиец в качестве направляющей. И изменю типы соединения на «Кривизна (G2).
Выберите оба ребра в качестве профилей и горизонтальный шлиец в качестве направляющей. И изменю типы соединения на «Кривизна (G2).

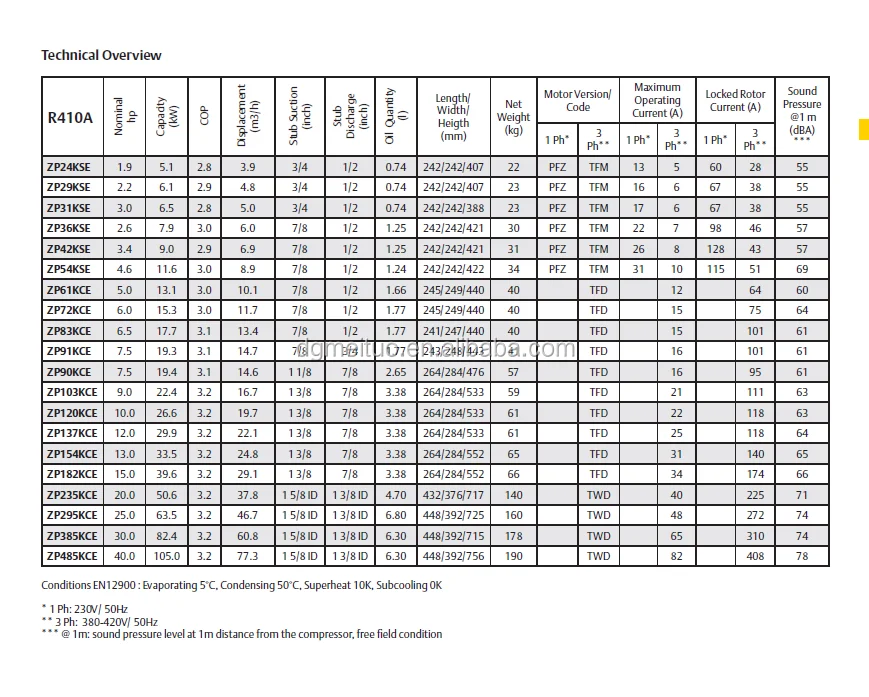 (куб.м)
(куб.м) jpeg»>
jpeg»>
 Izdelana iz trpežne ABS plastike in silikona.Ki se uporabljajo za odstranjevanje telefon in tablični računalnik steklene plošče.Uporabljate lahko dve kos dvignite zaslon stekla off aluminija so iMacs, mora imeti orodje za popravilo ali zamenjavo zdrobljen, počeno ali zdrobljeno iMac заслонку.
Izdelana iz trpežne ABS plastike in silikona.Ki se uporabljajo za odstranjevanje telefon in tablični računalnik steklene plošče.Uporabljate lahko dve kos dvignite zaslon stekla off aluminija so iMacs, mora imeti orodje za popravilo ali zamenjavo zdrobljen, počeno ali zdrobljeno iMac заслонку. Извиджач Рочадж Лахко Изполнгджуе Серье Глав (Križ T Tipa Plum Blossm Plug Glavo šsta razšritev palico Univerzalne Skupne, Lahko prejmete upogibanje palico) 2. vtiachnice, jakan -vanele vanele ranela -vanela -vaneleva raneleva raneleva raneleva raneleva raneleva ranelev nade ranelev nade ranelev nade ranelev.0009
Извиджач Рочадж Лахко Изполнгджуе Серье Глав (Križ T Tipa Plum Blossm Plug Glavo šsta razšritev palico Univerzalne Skupne, Lahko prejmete upogibanje palico) 2. vtiachnice, jakan -vanele vanele ranela -vanela -vaneleva raneleva raneleva raneleva raneleva raneleva ranelev nade ranelev nade ranelev nade ranelev.0009 Prosimo, довольствуйтесь 1-3см напак zaradi ročnega merjenja.Prosimo, poskrbite,
Prosimo, довольствуйтесь 1-3см напак zaradi ročnega merjenja.Prosimo, poskrbite,

 )
)
 32
32 11
11 12
12 8%
8% ₽
₽ ₽
₽ 11.2017
11.2017 Челябинск, Челябинская область
Челябинск, Челябинская область 59%
59%

 21
21 46
46


 Спонсоры отмечают, что закон привлечет до 220 миллиардов долларов в первый год и более 2,4 триллиона долларов в течение 10 лет.
Спонсоры отмечают, что закон привлечет до 220 миллиардов долларов в первый год и более 2,4 триллиона долларов в течение 10 лет. Этот язык идентичен тому, который использовался для описания воздействия налога в конце мая.
Этот язык идентичен тому, который использовался для описания воздействия налога в конце мая. | Последнее обновление: 03:44 IST
| Последнее обновление: 03:44 IST
 Одним из первых инцидентов, которые засвидетельствовали зарождение ранней робототехники, была разработка механического устройства около 3000 г. до н.э., которое было сконструировано для регулярного выполнения определенной физической задачи. Работа заключалась в том, чтобы бить часовые колокола в египетских водяных часах, и для этой цели они построили человеческие фигурки.
Одним из первых инцидентов, которые засвидетельствовали зарождение ранней робототехники, была разработка механического устройства около 3000 г. до н.э., которое было сконструировано для регулярного выполнения определенной физической задачи. Работа заключалась в том, чтобы бить часовые колокола в египетских водяных часах, и для этой цели они построили человеческие фигурки. Несмотря на эти корни вдохновения для современного робота, научный прогресс в робототехнике и автономных системах, достигнутый в 19 веке, в огромной степени превзошел предыдущие достижения.
Несмотря на эти корни вдохновения для современного робота, научный прогресс в робототехнике и автономных системах, достигнутый в 19 веке, в огромной степени превзошел предыдущие достижения.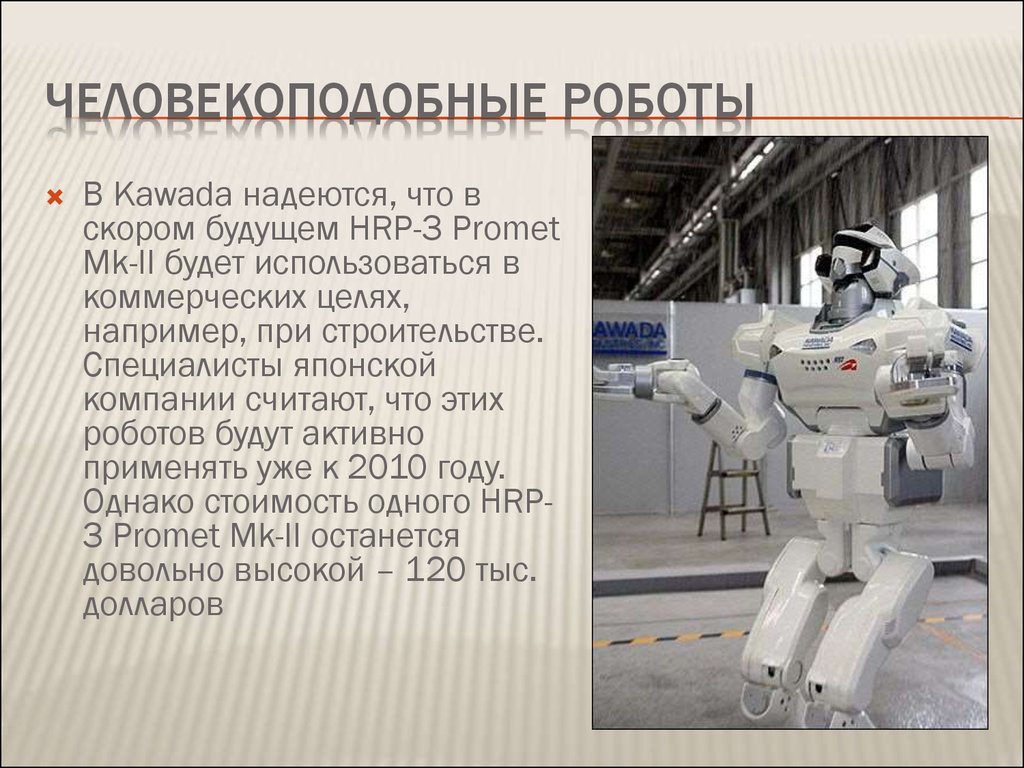
 Следовательно, автономность — это характеристика самого робота, которая определяет степень контроля, который он может иметь в отношении реакции на воспринимаемую среду.
Следовательно, автономность — это характеристика самого робота, которая определяет степень контроля, который он может иметь в отношении реакции на воспринимаемую среду.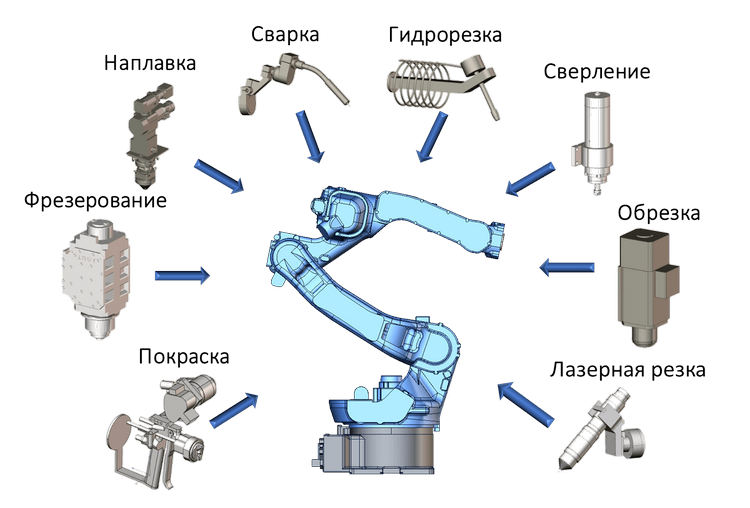 Например, лазерные сканеры и камеры стереовидения могут действовать как глаза робота, датчики ударов могут обеспечивать восприятие, эквивалентное человеческой коже, а датчики силы-момента могут давать расчет напряжения мышц.
Например, лазерные сканеры и камеры стереовидения могут действовать как глаза робота, датчики ударов могут обеспечивать восприятие, эквивалентное человеческой коже, а датчики силы-момента могут давать расчет напряжения мышц. Автономность дает роботу возможность повысить интеллект в процессе принятия решений. Это похоже на управление машиной в безопасном режиме. Автономный робот будет достаточно умен, чтобы ощущать опасности вокруг себя и либо останавливать, либо изменять свой образ действий по пути. Автономность приравнивает человеческую неврологическую систему роботов.
Автономность дает роботу возможность повысить интеллект в процессе принятия решений. Это похоже на управление машиной в безопасном режиме. Автономный робот будет достаточно умен, чтобы ощущать опасности вокруг себя и либо останавливать, либо изменять свой образ действий по пути. Автономность приравнивает человеческую неврологическую систему роботов.



 Таким образом, робототехника и автономные системы значительно продвинутся вперед в ближайшие годы, но роботы, завоевавшие человечество, все еще остаются далекой реальностью.
Таким образом, робототехника и автономные системы значительно продвинутся вперед в ближайшие годы, но роботы, завоевавшие человечество, все еще остаются далекой реальностью. Кроме того, в медицине используются робототехника и автономные системы при обучении и реабилитации.
Кроме того, в медицине используются робототехника и автономные системы при обучении и реабилитации. В то время как у нас есть подводные роботы, которые используются для мытья полов в бассейне или аналогичном водоеме. Однако у воздушных роботов есть применение в более широком диапазоне областей, начиная от оборонного сектора и заканчивая индустрией развлечений.
В то время как у нас есть подводные роботы, которые используются для мытья полов в бассейне или аналогичном водоеме. Однако у воздушных роботов есть применение в более широком диапазоне областей, начиная от оборонного сектора и заканчивая индустрией развлечений.
 Такой подход в 2-3 раза сокращает использование гербицидов на поле. Робот ориентируется в пространстве благодаря GPS-трекеру и датчикам, а сверху на нем установлены солнечные панели, которые позволяют ему работать 12 часов без подзарядки.
Такой подход в 2-3 раза сокращает использование гербицидов на поле. Робот ориентируется в пространстве благодаря GPS-трекеру и датчикам, а сверху на нем установлены солнечные панели, которые позволяют ему работать 12 часов без подзарядки. Напомним, что он также является автором робота-пастуха SwagBot.
Напомним, что он также является автором робота-пастуха SwagBot. Эта работа является одной из самых низкооплачиваемых в питомниках для растений, но использование робота намного дешевле человеческого труда. Вначале роботу нужно указать местоположение растений, после этого Nursery Bot с помощью датчиков находит горшок, закрепляет его механической рукой и перевозит в нужное место. Аппарат может работать на протяжении 10 часов и обойдется фермерам в $30 000.
Эта работа является одной из самых низкооплачиваемых в питомниках для растений, но использование робота намного дешевле человеческого труда. Вначале роботу нужно указать местоположение растений, после этого Nursery Bot с помощью датчиков находит горшок, закрепляет его механической рукой и перевозит в нужное место. Аппарат может работать на протяжении 10 часов и обойдется фермерам в $30 000.