Применение промышленных роботов в производстве: Сферы применения промышленных роботов — виды и классификация
Сферы применения промышленных роботов — виды и классификация
Сферы применения промышленных роботов — виды и классификация
Статьи
Оценить мой проект
Заказать сервис
Уже стало привычным использование производственных роботов для сварки, для укладки на паллеты или фасовки.
А ведь применение промышленных роботов значительно шире. Все что может сделать рука человека может повторить манипулятор своей механической рукой. А иногда робот может и больше. Ни один человек не поднимет груз в 1000 кг. А такие автоматизированные машины есть.
В промышленности роботы широко применяются для процессов сварки, перемещения изделий, механической обработки, окраски, сборки и т.д
Рассмотрим некоторые нестандартные применения различных типов:
Робот для тестирования:
Компания Volvo начала разработку систем безопасности, чтобы защитить людей на случай ДТП, связанных со съездом автомобиля с дороги.
Проведение необходимых тестов на реальных автомобилях было признано очень затратным и найдено альтернативное решение, совместно со шведским производителем промышленных машин АВВ.
Промышленный робот тяжелой серии был запрограммирован на движения имитирующие случаи съезда автомобиля с дороги. Что позволило проводить тесты и получить необходимые статистические данные о поведении тела человека в этот момент.
И вот аналогичный тест на автомобиле.
Компания «ДС-Роботикс» предлагает современные промышленные роботизированные системы, подходящие для самых разных производственных задач. К услугам клиентов — надежная техника для автоматизации процесса производства, направленная на решение задач, от резки, сборки, укладки, упаковки, окраски и до профессионального выполнением сварочных работ.
Зачем нужны промышленные роботы
Роботизированные помощники производственного назначения в последние годы применяются достаточно активно. И это отнюдь не удивительно. Промышленные манипуляторы работают без перерывов, отпусков и выходных и более экономично с позиции расходов. Тогда как люди устают, болеют, нуждаются в перерывах, отдыхе и заработной плате.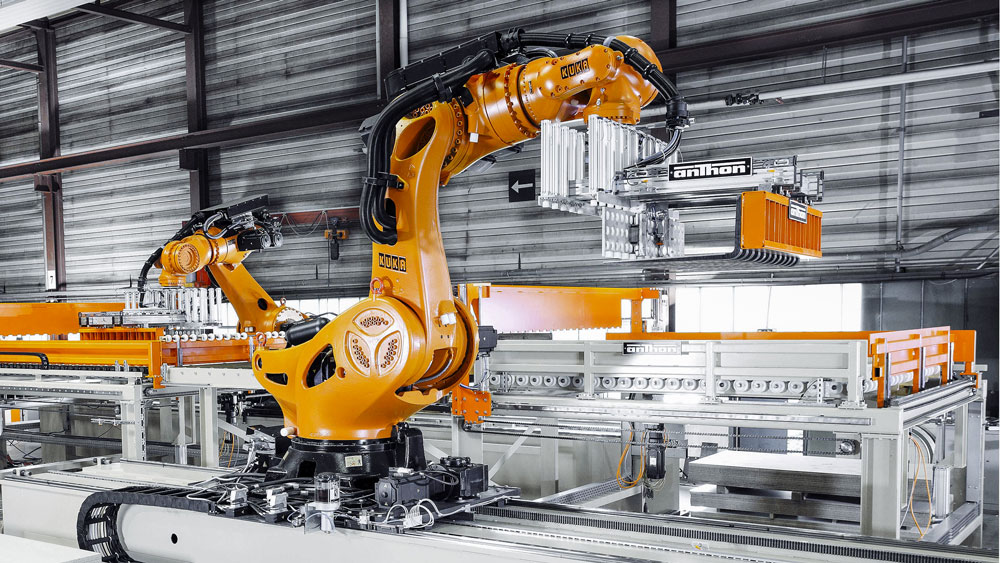
В большинстве случаев автоматизированные машины заменяют усилия как минимум нескольких специалистов. Они не требуют постоянного контроля за работой и делают процесс более качественным, быстрым и главное постоянным. Если человек может допустить ошибку, опоздать или уйти, то техника всегда функционирует и обеспечивает высокие показатели труда.
Таким образом, инвестиции в приобретение промышленных роботов для производства оказываются очень перспективными. Приобретение такого роботизированного помощника значительно упростит производственный процесс различным предприятиям, например, занятым в сфере производств: машиностроительного, пищевого, деревообработки, строительства, фармацевтики и металлургии.
Даже компаниям с ограниченным бюджетом следует серьезно задуматься о том, покупке промышленного робота, хотя, цена в Москве на них довольно высокая, зато в дальнейшем затраты окупятся сполна.
Большой выбор промышленных роботов
Для тех организаций, кто собирается купить промышленные роботы уже сейчас, мы предлагаем направить запрос на проработку к нашим специалистам.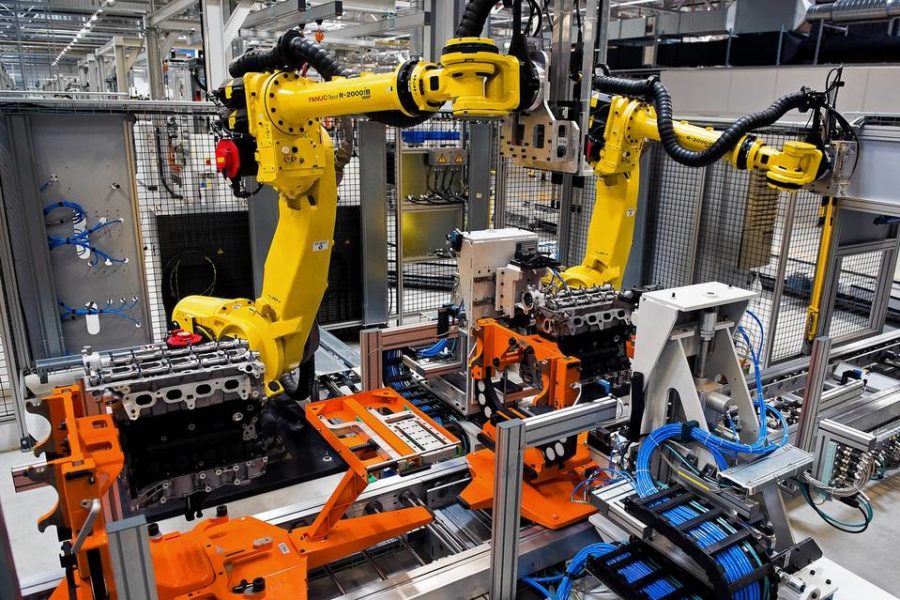 В большинстве случаев стандартное решение не совсем подходит, мы подготовим предложение именно для вашего производства. Наши сотрудники с удовольствием помогут выбрать технику и проконсультируют по интересующим вопросам. Компания «ДС-Роботикс» — это техника от известных производителей, брендов ABB и KUKA, преимущества которой проверены временем.
В большинстве случаев стандартное решение не совсем подходит, мы подготовим предложение именно для вашего производства. Наши сотрудники с удовольствием помогут выбрать технику и проконсультируют по интересующим вопросам. Компания «ДС-Роботикс» — это техника от известных производителей, брендов ABB и KUKA, преимущества которой проверены временем.
Специалисты «ДС-Роботикс» помогут провести экспертизу вашего предприятия и предложить роботизацию вашим призводственных мощностей. В конечном итоге ваша компания получит надежное оборудование, которое может работать по 24 часа и которому не требуется частое сервисное обслуживание.
Для вас — простые в управление, безопасные и максимально эффективные в использовании практически в любой промышленности роботизированные системы. Это машины, способные успешно решать любые задачи и вывести вашего производство на современный уровень.
Высокое качество
Продуманность решений, качественная компонентная база и опыт сотрудников — вот ключевые показатели, определяющие выбор клиентов в пользу оборудования от «ДС-Роботикс». Заказчики традиционно высоко оценивают наши роботизированные комплексы и часто обращаются повторно для роботизации следующих участков.
Заказчики традиционно высоко оценивают наши роботизированные комплексы и часто обращаются повторно для роботизации следующих участков.
Проектирование и производство роботизированных комплексов, пусконаладка и программирование, сервисное обслуживание и поставка запчастей — все это Вы получаете, воспользовавшись нашими услугами.
С тех пор, как промышленные машины и роботы стали неотъемлемой составляющей производственных процессов, прошло уже полвека.
Первый прототип современного промышленного роботизированного участка напоминал по своей конструкции человеческую руку, был способен выполнять лишь несколько операций. Данное техническое решение дало толчок как для развития промышленности, так и для совершенствования робототехники. За 50 лет период инженеры проделали большую работу, наделяя автоматизированных помощников новыми функциями и адаптируя их к работе в различных отраслях производства.
Сегодня благодаря видовому многообразию автоматизированных машин в промышленности их классифицируют по большому количеству признаков. Рассмотрим информацию подробнее.
Рассмотрим информацию подробнее.
-
По характеру выполняемых задач:
- производственные – выполняют операции в рамках конкретного технологического процесса. Например, сборка деталей, сварка, покраска, литье;
- вспомогательные – применяются для обслуживания производственного оборудования: подъем, складирование, снятие заготовок, инструментов;
- универсальные – могут выполнять различные задачи в зависимости от потребностей производства.
-
По типу управления
Промышленные роботы делятся на две крупные категории: полностью автоматизированные машины, а также системы, в управлении которыми в различной степени принимает участие оператор.
2.1. Автоматические роботы:
- роботы с программным управлением – широко распространенная категория оборудования, применяемого для совершения наиболее простых технологических операций. В числе преимуществ – относительно невысокая стоимость.
 Важная особенность — агрегаты действуют строго в рамках заложенной программы и не имеют сенсора;
Важная особенность — агрегаты действуют строго в рамках заложенной программы и не имеют сенсора; - роботы с адаптивным управлением – оснащены системой очувствления и блоком программ. Датчики передают сигналы, система их анализирует и принимает решение об использовании данной программы или о переходе на другую;
- обучаемые роботы – оборудование способно использовать информацию и таким образом «учиться». Специалист задает в блоке управления порядок действий, которому и следует машина;
- роботы с элементами искусственного интеллекта – промышленные машины, которые при помощи датчиков могут самостоятельно, без содействия специалиста, анализировать окружающую обстановку, делать выводы и даже принимать решения о дальнейших действиях. Такие аппараты накапливают информацию о предыдущих операциях.
2.2. Биотехнические роботы:
- с командным управлением – их еще называют «роботами наполовину», потому что значительную роль в их регулировании играет человек.
 Это категория манипуляторов, дистанционно управляемых оператором. Специалист дает команды каждому сочленению устройства;
Это категория манипуляторов, дистанционно управляемых оператором. Специалист дает команды каждому сочленению устройства; - с копирующим управлением – также «полуроботы». Они копируют операции задающего устройства, а его приводит в движение человек;
- полуавтоматические – для их работы специалист только задает перемещение органа манипулятора. Затем система управления самостоятельно формирует движения в различных сочленениях и если нужно, корректирует их.
2.3. Интерактивные роботы:
- с автоматизированным управлением – это оборудование чередует биотехнические и автоматические режимы управления;
- с супервизорным управлением – осуществляют смену этапов работы в промышленности благодаря управлению человека, но при этом оборудование самостоятельно автоматически выполняет все стадии запрограммированного цикла операций;
- с диалоговым управлением – это автоматизированные устройства, которые могут взаимодействовать со специалистом на определенном языке (например, посредством голосовых команд, передачи текстовых сообщений).
По виду производства и функционалу роботы в промышленности подразделяются: агрегаты для нанесения покрытий, штамповочные, сварочные, машины механической обработки, лазерной обработки, сборочные, транспортно-складские и др.
- В зависимости от задач, роботизированные системы могут быть мобильными или стационарными.
- По количеству степеней подвижности выделяют промышленные машины с одной, с двумя, с тремя, с четырьмя степенями, а также со степенями подвижности более четырех.
- Роботы в промышленности могут иметь один, два, три, четыре манипулятора.
- По точности позиционирования:
- малой точности – с погрешностью выполнения операций от 1 мм и больше;
- средней точности – с погрешностью позиционирования от 0,1 мм до 1 мм;
- высокой точности – их погрешность не превышает 0,1 мм.
- В зависимости от специфики технологических процессов, автоматизированные машины могут быть стационарными или подвижными.
- По системам координат, в которых действует промышленный робот:
- прямоугольная система координат;
- полярная система координат;
- угловая система координат.
3. По грузоподъемности роботизированная техника бывает следующих видов:
- сверхлегкая – ее грузоподъемность не превышает 1 кг.;
- легкая – грузоподъемность от 1 до 10 кг;
- средняя – от 10 до 200 кг;
- тяжелая – от 200 до 1000 кг;
- сверхтяжелая – более 1000 кг.
И это еще не все признаки классификации. Дополнительно промышленные манипуляторы разделяют по скорости выполнения операций, количеству манипуляторов, типу силового привода, условиям исполнения, характеру обработки программы, дискретности перемещения и др.
Сферы применения промышленных роботов
Распространение автоматизированного оборудования позволяет мировому производству активно развиваться. Инновации не стоят на месте, они применяются во все большем количестве сфер. При этом неверно думать, что человеку ничего не остается, кроме как искать новую работу. Профессионалы занимают особенную позицию в роботизированной промышленности – они управляют процессами.
В каких же сферах используются промышленные роботы? Приведем примеры:
- пищевая промышленность
- автомобильная промышленность
- медицина
- электроэнергетика
- лазерная резка
- металлообработка
- оптическое оборудование
- космическая отрасль
Данным списком количество сфер не ограничивается. Различные типы промышленных помощников могут выполнять сотни сложнейших задач. Они инспектируют трубопроводы, обезвреживают неразорвавшиеся мины, помогают в контрольно-измерительных операциях, обрабатывают крупногабаритные детали.
Как понять, какой тип роботов нужен именно вам?
Вам не нужно запоминать все виды роботизированных машин. Чтобы сэкономить самое дорогое – средства и время – обратитесь к профессионалам за консультацией! Специалисты ДС-РОБОТИКС имеют опыт в области роботизации промышленности. Они оперативно изучат потребности вашего производства и помогут принять решение по его модернизации.
Мы не только проведем комплексный анализ технологического процесса, но также посоветуем оборудование, обеспечим его установку, наладку, внедрение в работу. Наши специалисты обучат ваших сотрудников работе с новыми устройствами и всегда придут на помощь, когда она будет необходима.
Мы берем на себя ответственность за высокое качество услуг. Главная ценность компании ДС-РОБОТИКС – это высококвалифицированные инженеры, программисты и конструкторы. Благодаря их опыту мы признаны «Лучшим интегратором в России в 2016 и 2017 годах» по версии одного из мировых ведущих производителей промышленных роботов – шведской компании АВВ.
Запрос на обратную связь
Укажите Ваше имя и телефон.
Мы с Вами обязательно свяжемся.
Ваше имя *
Телефон *
* обязательные поля
Согласие на обработку персональных данных в соответствии с Пользовательским соглашением
Спасибо за Ваше обращение!
Наши менеджеры обязательно свяжутся с Вами.
Применение промышленных роботов | ROBOMATIC Промышленные роботы и автоматизация производства
Промышленные роботы находят все более широкое применение в различных отраслях промышленности, выполняя множество разнообразных задач. Применение промышленных роботов для автоматизации производственных процессов имеет массу неоспоримых преимуществ для предприятий.
- Исключение влияния человеческого фактора на конвейерном производстве, а также при проведении монотонных работ и решении задач, требующих высокой точности движения.
- В отличие от человека робот не ошибается при выполнении однотипных, монотонных операций в быстром темпе
Высокоскоростная сортировка и укладка являются довольно утомительными задачами для человека. Дельта-робот с системой технического зрения идеально подходит для ее решения, повышая производительность линии.
Роботы способны перемещать тяжелые изделия с высокой скоростью, позволяя эффективно решать задачи по упаковке и паллетизации повышение точности выполнения технологических операций и, как следствие, улучшение качества
- Повышение точности выполнения технологических операций и, как следствие, улучшение качества
- Точность позиционирования робота (десятые доли миллиметра) обеспечивает соблюдение требований по качеству и внешнему виду изделий
Высокая точность позиционирования роботов при сохранении высокой скорости движения позволяют с успехом применять роботов в операциях по сварке, обработке, резке материалов, сборке изделий, а также по позиционированию заготовок для станков.
- Возможность использования технологического оборудования в три-четыре смены, 365 дней в году
- Современные промышленные роботы являются высоконадежным оборудованием, спроектированным для непрерывного производства. При соблюдении всех технических требований срок эксплуатации манипулятора может составлять от 8 до 20 лет.
На многих автомобильных заводах применяются роботы, выпущенные более 15 лет назад, продолжая с успехом выполнять свои функции.
- Рациональность использования производственных помещений
- Производственная система на базе робота-манипулятора часто занимает меньше места, чем аналогичные системы на базе станков или специальных линий. Также стоит отметить, что манипуляторы, в отличие от станков, могут быть закреплены в любом положении (на стенах и даже на потолке). Робот также может быть оснащен системой перемещения, которая позволит манипулятору обрабатывать большие детали или обслуживать большее количество станков.
Дельта-роботы устанавливаются над производственными линиями и транспортерами
Установка роботов непосредственно над лентой конвейера позволяет расширить зону досягаемости и сэкономить рабочее пространство
Применение рельсовой системы перемещения позволяет значительно расширить зону досягаемости робота, позволяя обрабатывать большие по габаритам изделия либо множество изделий при помощи одного робота
- Исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью
- Промышленные роботы могут быть использованы в тех случаях, когда производственная среда не позволяет людям выполнять те или иные операции. Такими опасными факторами могут быть повышенная или пониженная температура, неприемлемое для человека давление, отсутствие воздуха (вакуум), наличие в воздухе ядовитых и взрывоопасных примесей, работа со взрывчатыми и радиоактивными веществами, повышенные уровни вибрации и шума, загрязнение воздуха газами, аэрозолями и взвесями и др. Противоположным примером, также подразумевающим применение роботов, являются так называемые «чистые комнаты» — производственные помещения с абсолютной стерильностью, для доступа в которые человеку приходится проходить процедуру очистки. Также роботы могут использоваться для выполнения операций с повышенной степенью риска для человека, таких как загрузка/разгрузка прессов, литейных машин и станков, оперирование горячими жидкостями и расплавленными металлами.
Для защиты роботов от загрязнения, низких температур и высоких применяются специальные чехлы и кожухи
- Экономическая выгода от использования робототехнических комплексов
- На современном этапе стоимость покупки и внедрения на производство для промышленного робота практически равняется таковой для станка. Но при этом робот является значительно более «гибким» вложением. В отличие от станка, манипулятор может быть переведен на другой производственный участок, для выполнения совершенно иной работы. Для этого требуется заменить исполнительный орган, изменить управляющую программу и скомпоновать новую роботизированную производственную ячейку. Также внедрение роботов позволяет снизить прямые и накладные расходы предприятия, например расходы на заработную плату замененного персонала, электроэнергию (освещение, вентиляция), обогрев помещений, очистку воздуха, затраты на аренду площадей.
Применение промышленной робототехники: роль в производстве
Опубликовано — Келси Тейлор
Промышленная робототехника применяется во многих производственных секторах, таких как фабрики и склады. В эту новую эру производства промышленные роботы играют важную роль в секторе автоматизации, и, следовательно, наблюдается значительный рост производства. Используя промышленных роботов, производители могут удешевить производство, ускорить производство и улучшить качество.
Инвестиции в промышленного робота велики, но и выгоды от него тоже велики. Следовательно, в промышленных роботов стоит инвестировать из-за их эффективной работы на производстве. В этой статье мы увидим некоторые важные области применения промышленных роботов.
- Общие сведения о промышленных роботах
- Какие существуют типы промышленных роботов?
- Как работают промышленные роботы?
- Основные области применения промышленной робототехники
Общие сведения о промышленных роботах
Промышленные роботы — это машины, запрограммированные для выполнения автомобильных задач, связанных с производством. Различные отрасли промышленности используют роботов для гибкой автоматизации и большого объема производства. Эти роботы могут выполнять сложные серии действий и сокращать время производства.
UNIMATE — первый промышленный робот, использовавшийся General Motors в начале 1960-х годов. Роботы в производстве могут выполнять множество действий, от обработки материалов до упаковки. Поэтому они предназначены для выполнения различных и повторяющихся задач и сокращения времени, необходимого для производства. Фактически промышленные роботы снабжены системами искусственного интеллекта и машинного обучения, которые помогают производителю реагировать на ситуации в реальном времени.
Какие существуют типы промышленных роботов?
Благодаря быстрому развитию робототехники и технологий автоматизации внедрение промышленных роботов в производственных секторах увеличилось. Кроме того, многочисленные промышленные роботы используются для выполнения множества задач с повторяемостью, что приводит к производству продукции хорошего качества. Таким образом, существует несколько применений промышленной робототехники в производственном секторе. Здесь мы изучим некоторые основные типы промышленных роботов.
Роботы с шарнирно-сочлененной рамой
Роботы с шарнирно-сочлененной рамой — это повседневные промышленные роботы, которые своей механической структурой напоминают человеческие руки. Эта человеческая рука прикреплена к основанию в виде скрученного сустава. Поворотный шарнир, прикрепленный к руке шарнирно-сочлененных роботов, параллелен и имеет шесть степеней свободы. Шесть степеней свободы шарнирных роботов обеспечивают максимальную гибкость.
Преимущества:
- Шарнирно-сочлененные роботы легче приспосабливаются к нескольким пространствам.
- Это высокоскоростные роботы.
Недостатки:
- Сложное программирование
- Требуется специальный контроллер робота
Декартовы роботы
Прямолинейные или портальные роботы — другое название декартовых роботов. Он имеет прямоугольную форму и имеет три призматических соединения. Эти суставы перпендикулярны своим трем осям, X, Y и Z, которые обеспечивают линейное движение. Декартовы роботы могут иметь запястья, прикрепленные к их суставам, которые позволяют совершать вращательные движения. Кроме того, они более гибкие и используются в нескольких производственных секторах, что делает их подходящими для конкретных приложений.
Преимущества:
- Простое управление
- Широкие возможности настройки
Недостатки:
- Сложная сборка
- Ограниченное движение только в одном направлении.
Роботы SCARA
Роботы-манипуляторы с селективным соответствием (SCARA) состоят из двух параллельных шарниров. Он имеет оболочку в форме пончика, которая обеспечивает соответствие в одном направлении. Рычаг, прикрепленный к вращающемуся валу, расположен вертикально и движется горизонтально. Таким образом, по сравнению с цилиндрическими и декартовыми роботами роботы SCARA перемещаются быстрее и легче интегрируются.
Преимущества:
- Отличная воспроизводимость.
- Высокая скорость
Недостатки:
- Роботы SCARA ограничены строгальными поверхностями.
- Трудно программировать в автономном режиме.
Дельта-роботы
Дельта-роботы или роботы с параллельным соединением состоят из параллельных шарнирных соединений, прикрепленных к общему основанию в его механической структуре. Он обеспечивает высокую скорость работы и, как правило, используется для быстрого переноса товара.
Преимущества:
- Очень высокая скорость
- Обеспечивают высокую точность.
Недостатки:
- Сложность эксплуатации.
- Требуется специальный контроллер робота.
Роботы Polar
Роботы Polar имеют витые шарниры, прикрепленные к манипулятору, и два поворотных шарнира с одним линейным шарниром, соединенным со звеньями. Эти роботы являются сферическими роботами, поскольку они имеют сферическую рабочую оболочку. Кстати, доступ к этой конфигурации противоположного манипулятора ограничен в пределах его рабочего пространства.
Преимущества:
- Требуется меньше места на полу
- Большой рабочий объем
Недостатки:
- Не может подняться выше себя
- Короткий вертикальный вылет
Цилиндрические роботы
Прежде всего, цилиндрические роботы имеют цилиндрическое рабочее пространство и поворотный вал с по крайней мере одним призматическим шарниром и одним поворотным шарниром, прикрепленным к звеньям. Далее стойка перемещается вертикально за счет выдвижного рычага и скольжения. Благодаря своей цилиндрической конструкции эти роботы обеспечивают горизонтальное и вертикальное линейное перемещение со своими осями.
Преимущества:
- Во-первых, он прост в эксплуатации и установке.
- Во-вторых, он сам может охватывать все вокруг.
Недостатки:
- Низкая точность
- Самое главное, он не может обходить препятствия.
Как работают промышленные роботы?
Промышленные роботы выполняют несколько производственных задач с помощью датчиков, контроллеров и приводов. Они выполняют повторяющийся цикл движения, запрограммированный производителем, с набором команд. Кроме того, роботы разрабатывают машины, которые могут уменьшить вмешательство человека. Их можно использовать для различных производственных процессов или там, где люди не могут выжить, например, в космосе, при высокой температуре, под водой и т. д.
Кроме того, они предназначены для работы в опасных условиях, включая проверку радиоактивных материалов, обезвреживание бомб и т. д. Роботы программируются и могут двигаться по трем и более осям. Следовательно, они имеют некоторые типичные области применения, такие как сварка, сборка, покраска и т. д.
Основные области применения промышленной робототехники
Промышленные роботы широко применяются в производственных секторах. Здесь мы изучим некоторые важные области применения промышленных роботов.
- Сборка и дозирование
- Обработка и сбор
- Обработка и резка
- Сварка и пайка
- Литье и литье
- Отделка и шлифование
- Окраска и покрытие
- Очистка и гигиена
- Логистика и хранение
- Упаковка и паллетирование
- Инспекция и контроль качества
- Сбор урожая
Сборка и дозирование
Как известно, производственный процесс включает в себя сборку небольших узлов в большие. Благодаря техническому прогрессу теперь можно использовать роботов в производственных секторах для одновременного выполнения нескольких задач. Во время процессов сборки в промышленности требуются клеевые роботы, поскольку большинство операций по сборке являются липкими.
Сборочные роботы не могут менять свое положение, так как прикрепляются к полу. Большинство сборочных роботов имеют декартову конфигурацию. Автомобильная промышленность первой начала использовать роботов-сборщиков. Для таких работ, как клей и эпоксидная смола, нужны высокоскоростные роботы.
Обработка и комплектование
Промышленные роботы, которые перевозят товары на складе, являются роботами-манипуляторами. Кроме того, роботы, используемые для сбора предметов и помещения их в упаковочный мешок, являются примерами роботов-сборщиков. Эти роботы полезны для компании электронной коммерции. Короче говоря, роботы для обработки материалов, роботы для обработки жидкостей, роботы для захвата и размещения являются другими примерами роботов для обработки и сбора.
Механическая обработка и резка
В любом производственном секторе или промышленной среде существует потребность в повторяющихся операциях. Таким образом, для автоматизации процесса единственным вариантом являются роботы. Точно так же для машин и областей резки в производственном секторе требуются разные роботы, такие как роботы для обслуживания и загрузки станков, фрезерные роботы, сверлильные роботы, малые режущие роботы, роботы для плазменной резки и роботы для гидроабразивной резки.
Сварка и пайка
В промышленности дуговая сварка используется для соединения металлических деталей с помощью электричества. Тепло помогает металлическим деталям соединяться и окончательно соединяться при остывании. Между тем, роботы для дуговой сварки упрощают этот процесс, поскольку он становится автоматизированным. После этого этот процесс автоматизации теперь множится.
Конечно, процесс пайки требует добавления в соединение расплавленного присадочного материала. В последствии температура плавления этого материала ниже рабочей. Самое главное, что паяльные роботы помогают сделать этот процесс автоматизированным и быстрым.
Литье и литье
В процессе литья металлический объект формируется путем впрыскивания жидкого металла в полость объекта. Литье и литье одинаковы, но материал, используемый для плавки, разный. Использование пластика в процессе литья. Но формование происходит быстрее, чем процесс литья. Таким образом, роботы для литья под давлением, отделочные, шлифовальные и т. д. являются примерами роботов для процессов литья и формования.
Отделка и шлифование
Нежелательный материал удаляется в процессе отделки и шлифования для получения конечного желаемого продукта. Другими словами, это процесс отделки и шлифования. Во многих производственных секторах, таких как литье, сварка и сверление, ненужный материал остается, поэтому для изготовления конечного продукта этот материал должен быть чистым. Кроме того, роботы для удаления заусенцев, шлифовальные роботы и роботы для полировки являются примерами роботов, упрощающих и автоматизирующих этот процесс.
Окраска и покрытие
Для промышленной окраски и покрытия требуется заготовка для изготовления конечного продукта. Точно так же нанесение краски или покрытия на заготовку представляет собой процесс промышленной окраски и покрытия. Кроме того, этот процесс очень повторяющийся и требует автоматизации. Следовательно, роботы для окраски, роботы для окраски распылением и роботы для нанесения покрытий используются для окраски и нанесения покрытий.
Очистка и гигиена
Очистка и гигиена необходимы для поддержания чистоты промышленных объектов и качества продукции. Кроме того, безопасность имеет решающее значение на любом рабочем месте, поэтому гигиена является еще одним важным параметром. Поэтому этот процесс повторяется и требует роботов-уборщиков.
Логистика и хранение
Как следует из названия, нам нужна логистика для перевозки товаров или любых заготовок. Итак, для выполнения этой деятельности складу требуются роботы-доставщики. Кроме того, существует потребность в автоматизации транспортировки, упаковки товаров, маркировки и т. д. Подводя итог, можно сказать, что складские роботы и роботы-доставщики являются примерами промышленных роботов.
Упаковка и укладка на поддоны
Различные отрасли промышленности, такие как склады, производство и места распределения, имеют процессы упаковки и укладки на поддоны. Точно так же для упаковки небольших посылок нам нужны роботы, так как это повторяющийся процесс. Например, для этого процесса требуются два робота: роботы для упаковки и роботы для укладки на поддоны.
Инспекция и контроль качества
Как мы знаем, некоторые вопросы инспекции и контроля качества опасны и представляют собой жизнь и смерть. Точно так же, если мы не установим эту часть, это может привести к опасной для жизни ситуации. Следовательно, для 100% точности нам нужны роботы. В результате роботы технического зрения являются лучшим примером приложений для инспекции и контроля качества.
Сбор урожая
Своевременный сбор урожая овощей и фруктов крайне важен. Однако, чтобы обеспечить высокое качество продукции, нам необходимо своевременно проводить уборку урожая. Зерновые культуры чувствительны ко времени и требуют времени для сбора урожая. Итак, для выполнения этой задачи нам понадобится робот-сборщик.
Заключение
В заключение отметим, что промышленные роботы имеют несколько возможностей и применений в производственном секторе. Вышеупомянутые приложения показывают, что роботы обеспечивают более высокое качество, более низкую стоимость и меньшее количество травм на рабочем месте. Чтобы уточнить, промышленные роботы теперь стали привычным явлением для многих отраслей.
Вам также может быть интересно прочитать:
Обзор основных принципов передвижения роботов
Промышленные облачные вычисления: возможности и будущее
Примеры промышленных роботов: новая эра производства!
8 Применение промышленного Интернета вещей
Примеры промышленного Интернета вещей (IIoT)
Автоматизация | Технология, типы, рост, история и примеры
Жаккардовый ткацкий станок
Смотреть все СМИ
- Ключевые люди:
- Жак де Вокансон
- Похожие темы:
- компьютерно-интегрированные производства
гибкая автоматизация
стационарная автоматика
машинное программирование
промышленный робот
Просмотреть весь связанный контент →
Сводка
Прочтите краткий обзор этой темы
автоматизация , применение машин к задачам, которые когда-то выполнялись людьми или, все чаще, к задачам, которые иначе были бы невозможны. Хотя термин механизация часто используется для обозначения простой замены человеческого труда машинами, автоматизация обычно подразумевает интеграцию машин в самоуправляемую систему. Автоматизация произвела революцию в тех областях, в которых она была внедрена, и едва ли найдется аспект современной жизни, на который она не повлияла.
Термин «автоматизация» был придуман в автомобильной промышленности примерно в 1946 году для описания более широкого использования автоматических устройств и средств управления на механизированных производственных линиях. Происхождение слова приписывают Д. С. Хардеру, в то время техническому директору Ford Motor Company. Этот термин широко используется в производственном контексте, но он также применяется вне производства в связи с различными системами, в которых механическое, электрическое или компьютеризированное действие в значительной степени заменяет человеческие усилия и интеллект.
В общем случае автоматизацию можно определить как технологию, связанную с выполнением процесса с помощью запрограммированных команд в сочетании с автоматическим контролем обратной связи для обеспечения надлежащего выполнения инструкций. Полученная система способна работать без вмешательства человека. Развитие этой технологии все больше зависит от использования компьютеров и связанных с ними технологий. Следовательно, автоматизированные системы становятся все более изощренными и сложными. Усовершенствованные системы представляют собой уровень возможностей и производительности, которые во многих отношениях превосходят способности людей выполнять те же действия.
Технологии автоматизации созрели до такой степени, что ряд других технологий развился из них и получил собственное признание и статус. Робототехника — одна из таких технологий; это специализированная отрасль автоматизации, в которой автоматическая машина обладает определенными антропоморфными или человекоподобными характеристиками. Наиболее типичной человеческой характеристикой современного промышленного робота является его механическая рука с приводом. Рука робота может быть запрограммирована на выполнение последовательности движений для выполнения полезных задач, таких как загрузка и разгрузка деталей на производственной машине или выполнение последовательности точечных сварок на листовых частях кузова автомобиля во время сборки. Как показывают эти примеры, промышленные роботы обычно используются для замены людей в фабричных операциях.
В этой статье рассматриваются основы автоматизации, включая ее историческое развитие, принципы и теорию работы, применение на производстве и в некоторых сферах услуг и отраслях, важных в повседневной жизни, а также влияние на человека и общество в целом. В статье также рассматривается разработка и технология робототехники как важная тема в области автоматизации. Связанные темы см. в разделе Информатика и обработка информации.
Историческое развитие автоматизации
Технология автоматизации развилась из родственной области механизации, начало которой положила промышленная революция. Механизация относится к замене силы человека (или животного) механической силой той или иной формы. Движущей силой механизации была склонность человечества к созданию инструментов и механических устройств. Здесь описаны некоторые важные исторические разработки в области механизации и автоматизации, приведшие к созданию современных автоматизированных систем.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
Ранние разработки
Первые инструменты из камня представляли собой попытки доисторического человека направить свою физическую силу под контроль человеческого разума. Тысячи лет, несомненно, потребовались для разработки простых механических устройств и машин, таких как колесо, рычаг и шкив, с помощью которых можно было увеличить силу человеческих мышц. Следующим расширением стала разработка механических машин, для работы которых не требовалась человеческая сила. Примеры этих машин включают водяные колеса, ветряные мельницы и простые устройства с паровым приводом. Более 2000 лет назад китайцы разработали отбойные молотки, приводимые в движение проточной водой и водяными колесами. Первые греки экспериментировали с простыми реактивными двигателями, работающими от пара. Механические часы, представляющие собой довольно сложный узел с собственным встроенным источником питания (гирей), были разработаны около 1335 года в Европе. Ветряные мельницы с механизмами автоматического поворота парусов были разработаны в средние века в Европе и на Ближнем Востоке. Паровой двигатель стал крупным достижением в развитии механических машин и положил начало промышленной революции. В течение двух столетий, прошедших с момента появления паровой машины Уатта, были изобретены механические двигатели и машины, получающие энергию от пара, электричества, химических, механических и ядерных источников.
Каждая новая разработка в истории механических машин влекла за собой повышенные требования к устройствам управления для использования мощности машины. Самые ранние паровые двигатели требовали, чтобы человек открывал и закрывал клапаны, чтобы сначала впустить пар в поршневую камеру, а затем выпустить его. Позже был разработан механизм золотникового клапана для автоматического выполнения этих функций. Единственная потребность человека-оператора заключалась в том, чтобы регулировать количество пара, которое контролировало скорость и мощность двигателя. Это требование человеческого внимания при работе паровой машины было устранено регулятором летающих шаров. Это устройство, изобретенное Джеймсом Уаттом в Англии, состояло из утяжеленного шара на шарнирном рычаге, механически соединенного с выходным валом двигателя. По мере увеличения скорости вращения вала центробежная сила заставляла утяжеленный шар двигаться наружу. Это движение управляло клапаном, который уменьшал подачу пара в двигатель, тем самым замедляя двигатель. Регулятор летающего шара остается элегантным ранним примером системы управления с отрицательной обратной связью, в которой увеличение выходной мощности системы используется для снижения активности системы.
Отрицательная обратная связь широко используется как средство автоматического управления для достижения постоянного уровня работы системы. Типичным примером системы управления с обратной связью является термостат, используемый в современных зданиях для контроля температуры в помещении. В этом устройстве понижение температуры в помещении приводит к замыканию электрического выключателя, в результате чего нагреватель включается.
 DSS610GA037,GA038HG5012,HG551V,HG5002,HG651V и др.HK0500HK1820,HR2800,HR2810,HR2811F,HR2811FTHM0860CHM0870CHM0871CHM1101C и др.HM1111CHM1202CHM1213CHM1214C и др.HM1304,HM1304BHM1307C,HM1307CBHM1317C,HM1317CBHP330D,DF030D,DF330D,TD090D,TW100D и др.HP330D и др.HP1630,HP1631HP2030,HP2031,HP2032,HP2033 и др.HP2050,HP2051,HP2070,HP2071,HR1830,HR2020,HR2440,HR2450,HR2470 и дрHR2010 и др.HR2040,HR2042 и др.HR2230,HR2460,HR2470,HR2470F,HR2470FT и др.HR2300,HR2600,HR2630 и др.HR2400,HR2410 и др.HR2432HR2450,HR2450FT,HR2455,HR2470,HR2475,HR2641 и др.HR2470 и др.HR2610 и др.HR2611F и др.HR2630 и др.HR2631FT и др.HR3000CHR3200C,HR3540C,HR3541FC и др.HR3210C,HR3210FCT,HR3541FCHR4000C,HR4001CHR4001C,HR4010C и др.HR4011C и др.HR4500CHR4501C,HR5201CHR4510C,HR5210CHR4511C,HR5211CHR5001CHR5202C,HR5212C и др.HS7601JR001JR100D,JR102DJR3050T,JR3060T,JR3070CTJV0600JV100DJV101DKP0800,1902KP0810,KP0810CPJ7000RP0900,3620SP6000TM30TM3000CTW0200TW0350UC120D и др.Болгарки 115 мм и 125 ммБолгарки 115 мм и 125 мм 9555HN,9557HN,9558HN,9565HZ,GA5030 и др.
DSS610GA037,GA038HG5012,HG551V,HG5002,HG651V и др.HK0500HK1820,HR2800,HR2810,HR2811F,HR2811FTHM0860CHM0870CHM0871CHM1101C и др.HM1111CHM1202CHM1213CHM1214C и др.HM1304,HM1304BHM1307C,HM1307CBHM1317C,HM1317CBHP330D,DF030D,DF330D,TD090D,TW100D и др.HP330D и др.HP1630,HP1631HP2030,HP2031,HP2032,HP2033 и др.HP2050,HP2051,HP2070,HP2071,HR1830,HR2020,HR2440,HR2450,HR2470 и дрHR2010 и др.HR2040,HR2042 и др.HR2230,HR2460,HR2470,HR2470F,HR2470FT и др.HR2300,HR2600,HR2630 и др.HR2400,HR2410 и др.HR2432HR2450,HR2450FT,HR2455,HR2470,HR2475,HR2641 и др.HR2470 и др.HR2610 и др.HR2611F и др.HR2630 и др.HR2631FT и др.HR3000CHR3200C,HR3540C,HR3541FC и др.HR3210C,HR3210FCT,HR3541FCHR4000C,HR4001CHR4001C,HR4010C и др.HR4011C и др.HR4500CHR4501C,HR5201CHR4510C,HR5210CHR4511C,HR5211CHR5001CHR5202C,HR5212C и др.HS7601JR001JR100D,JR102DJR3050T,JR3060T,JR3070CTJV0600JV100DJV101DKP0800,1902KP0810,KP0810CPJ7000RP0900,3620SP6000TM30TM3000CTW0200TW0350UC120D и др.Болгарки 115 мм и 125 ммБолгарки 115 мм и 125 мм 9555HN,9557HN,9558HN,9565HZ,GA5030 и др. Болгарки 125 мм и 230 мм (для 2-х штук)Болгарки 180 мм и 230 мм GA7030S,GA7040S,GA9030,GA9030S,GA9040,GA9040S и др.Болгарки 230 мм 9049,9059 и др.Болгарки 230 мм 9069,GA9020 и др.Для оснастки DF010D,DF012D,DF030D,DF330D,HP330D,TD090D и др.Для оснастки мультитулов BTM40,BTM50,DTM40,DTM50,TM3000CДля цепных пилДля цепных пил UC3030,UC3530,UC4030,UC4530Защёлка для кейсовУниверсальный Набор Li-ion (Перфоратор, фонарь, УШМ, шуруповерт)Универсальный Набор Li-ion (Циркульная пила, фонарь, сабельная пила, шуруповерт)Универскальный Набор Li-ion (сабельная пила, фонарь, УШМ, шуруповерт)
Болгарки 125 мм и 230 мм (для 2-х штук)Болгарки 180 мм и 230 мм GA7030S,GA7040S,GA9030,GA9030S,GA9040,GA9040S и др.Болгарки 230 мм 9049,9059 и др.Болгарки 230 мм 9069,GA9020 и др.Для оснастки DF010D,DF012D,DF030D,DF330D,HP330D,TD090D и др.Для оснастки мультитулов BTM40,BTM50,DTM40,DTM50,TM3000CДля цепных пилДля цепных пил UC3030,UC3530,UC4030,UC4530Защёлка для кейсовУниверсальный Набор Li-ion (Перфоратор, фонарь, УШМ, шуруповерт)Универсальный Набор Li-ion (Циркульная пила, фонарь, сабельная пила, шуруповерт)Универскальный Набор Li-ion (сабельная пила, фонарь, УШМ, шуруповерт) Изделия известных производителей, как правило (в разных комплектациях), комплектуются фирменным «чемоданчиком», но если его нет, то нужный вариант можно подобрать в специализированном магазине. Для этого необходимо ознакомиться с критериями выбора.
Изделия известных производителей, как правило (в разных комплектациях), комплектуются фирменным «чемоданчиком», но если его нет, то нужный вариант можно подобрать в специализированном магазине. Для этого необходимо ознакомиться с критериями выбора. п.), необходимые дополнительные приспособления, расходные материалы (смазка и т.п.) и другие нужные предметы.
п.), необходимые дополнительные приспособления, расходные материалы (смазка и т.п.) и другие нужные предметы. «Чемоданчик» снабжается удобной ручкой и замком.
«Чемоданчик» снабжается удобной ручкой и замком. Могут использоваться такие варианты:
Могут использоваться такие варианты: Определяет он в основном размерами УШМ. Можно выделить такие основные категории:
Определяет он в основном размерами УШМ. Можно выделить такие основные категории: Аналогичные изделия выпускаются фирмой Metabo (модели 623854000 и 623857000).
Аналогичные изделия выпускаются фирмой Metabo (модели 623854000 и 623857000). В них размещается только самое необходимое для работы. Более вместительны кейсы, в которых ячейки располагаются на обеих створках. Обычно УШМ фиксируется в нижней части, а остальные элементы — на откидной створке. Специфическую конструкцию имеют кейсы со съемными аккумуляторами. В них предусматривается отдельная ячейка для размещения батарей.
В них размещается только самое необходимое для работы. Более вместительны кейсы, в которых ячейки располагаются на обеих створках. Обычно УШМ фиксируется в нижней части, а остальные элементы — на откидной створке. Специфическую конструкцию имеют кейсы со съемными аккумуляторами. В них предусматривается отдельная ячейка для размещения батарей. требуется серьезный подход к выбору кейса. У них размеры могут заметно отличаться для разных марок изделий, а потому кейс выбирается под конкретную модель. Он может выполняться из металла или пластика.
требуется серьезный подход к выбору кейса. У них размеры могут заметно отличаться для разных марок изделий, а потому кейс выбирается под конкретную модель. Он может выполняться из металла или пластика. Если УШМ куплена без такой упаковки, то можно приобрести кейс и отдельно. При выборе следует обратить внимание на торговую марку и модель, т.к. по ним можно определить область применения.
Если УШМ куплена без такой упаковки, то можно приобрести кейс и отдельно. При выборе следует обратить внимание на торговую марку и модель, т.к. по ним можно определить область применения.
 Корпус — пластиковый.
Корпус — пластиковый. Положительные отзывы имеет пластиковый кейс для УШМ Dexter Power NC800AF с диском 125 мм. и ящик-кейс из алюминия размером 23х12х32 см.
Положительные отзывы имеет пластиковый кейс для УШМ Dexter Power NC800AF с диском 125 мм. и ящик-кейс из алюминия размером 23х12х32 см. Высота нижнего короба выбирается, исходя из высоты УШМ. Вторая половина исполняет роль крышки. Наружная сторона фанеры тщательно шлифуется и покрывается лаком или краской.
Высота нижнего короба выбирается, исходя из высоты УШМ. Вторая половина исполняет роль крышки. Наружная сторона фанеры тщательно шлифуется и покрывается лаком или краской.

 Эти угольные щетки совместимы с моделью Skil: SPT84-01 (продается отдельно). Пожалуйста, обратитесь к схеме инструмента, чтобы убедиться, что часть…
Эти угольные щетки совместимы с моделью Skil: SPT84-01 (продается отдельно). Пожалуйста, обратитесь к схеме инструмента, чтобы убедиться, что часть… в упаковке)
в упаковке) Эти чаши имеют…
Эти чаши имеют… Высококачественная непористая стеклянная поверхность этой чаши хороша по двум причинам: она не впитывает запахи,…
Высококачественная непористая стеклянная поверхность этой чаши хороша по двум причинам: она не впитывает запахи,… ..
..
 Как пример, модификация двигателя внутреннего сгорания под капотом автомобиля. Чтобы изменить конструкцию двигателя и продумать его размещение в корпусе, разумнее всего создать 3D‑модель и проделать все расчеты в виртуальном пространстве. Сделать это можно, заказав услугу 3D‑сканирования или применив моделирование по фотографии.
Как пример, модификация двигателя внутреннего сгорания под капотом автомобиля. Чтобы изменить конструкцию двигателя и продумать его размещение в корпусе, разумнее всего создать 3D‑модель и проделать все расчеты в виртуальном пространстве. Сделать это можно, заказав услугу 3D‑сканирования или применив моделирование по фотографии.
 Из-за сложностей настроек скорее подойдет сотрудникам профессиональных киностудий
Из-за сложностей настроек скорее подойдет сотрудникам профессиональных киностудий
 Другие, например, Blender, предоставляют возможность редактирования с помощью ракурсов виртуальных камер.
Другие, например, Blender, предоставляют возможность редактирования с помощью ракурсов виртуальных камер.

 Давайте перейдем к уроку по созданию 3D-моделей из ваших фотографий.
Давайте перейдем к уроку по созданию 3D-моделей из ваших фотографий.
 Вы можете добавлять анимацию, создавать 3D-истории и добавлять визуальные эффекты (VFX) для улучшения визуального качества. Это лучшее программное обеспечение для 3D-моделирования. Кроме того, это в автономном режиме и бесплатно! Так чего же ты ждешь? Давайте воспользуемся этой программой, чтобы научиться создавать 3D-модели для печати из ваших фотографий.
Вы можете добавлять анимацию, создавать 3D-истории и добавлять визуальные эффекты (VFX) для улучшения визуального качества. Это лучшее программное обеспечение для 3D-моделирования. Кроме того, это в автономном режиме и бесплатно! Так чего же ты ждешь? Давайте воспользуемся этой программой, чтобы научиться создавать 3D-модели для печати из ваших фотографий. Нажимать G схватить вершины или точки. Нажми на вершины, Затем нажмите E для перемещения объекта.
Нажимать G схватить вершины или точки. Нажми на вершины, Затем нажмите E для перемещения объекта.

 Это приложение для 3D-моделирования с базовыми функциями. Отлично подходит для любителей, чтобы получить базовые знания и опыт.
Это приложение для 3D-моделирования с базовыми функциями. Отлично подходит для любителей, чтобы получить базовые знания и опыт. Мы желаем вам всего наилучшего в ваших будущих начинаниях.
Мы желаем вам всего наилучшего в ваших будущих начинаниях. При использовании любого из этих решений вы должны помнить, что результаты сильно зависят от 2D-материала, который у вас есть в начале вашей работы. Вот почему не существует универсального или уникального решения. Опираясь на свой опыт, Cyberfox даст вам несколько практических советов, как создать максимально эффективную съемку для вашей личной модели, а также правильно ее преобразовать и получить в итоге наилучший результат.
При использовании любого из этих решений вы должны помнить, что результаты сильно зависят от 2D-материала, который у вас есть в начале вашей работы. Вот почему не существует универсального или уникального решения. Опираясь на свой опыт, Cyberfox даст вам несколько практических советов, как создать максимально эффективную съемку для вашей личной модели, а также правильно ее преобразовать и получить в итоге наилучший результат.
 Все доступно на CyberFox.
Все доступно на CyberFox. Все возможно с программным обеспечением настоящего времени.
Все возможно с программным обеспечением настоящего времени. Программное обеспечение создает и экспортирует файлы в форматах 3D-печати. Используя простые инструменты редактирования, даже пользователи начального уровня могут создавать 3D-изображения.
Программное обеспечение создает и экспортирует файлы в форматах 3D-печати. Используя простые инструменты редактирования, даже пользователи начального уровня могут создавать 3D-изображения.

 (Если ваша фотография недостаточного качества или не имеет необходимого количества деталей, то вам нужно будет нарисовать их самостоятельно.)
(Если ваша фотография недостаточного качества или не имеет необходимого количества деталей, то вам нужно будет нарисовать их самостоятельно.)
 Добавление света поможет вам получить хорошую светочувствительность и уменьшить шум. Независимо от того, используете ли вы естественный или искусственный свет, важно избегать теней, которые размывают очертания объекта.
Добавление света поможет вам получить хорошую светочувствительность и уменьшить шум. Независимо от того, используете ли вы естественный или искусственный свет, важно избегать теней, которые размывают очертания объекта. Он идеально подходит не только для профессионалов, но и для неопытных пользователей.
Он идеально подходит не только для профессионалов, но и для неопытных пользователей.
 Широко используется Министерством транспорта, коммерческими картографическими компаниями, а также национальными и региональными картографическими органами, поскольку предлагает множество инструментов для работы: различные типы облаков точек для преобразования фотографий и управления большими данными.
Широко используется Министерством транспорта, коммерческими картографическими компаниями, а также национальными и региональными картографическими органами, поскольку предлагает множество инструментов для работы: различные типы облаков точек для преобразования фотографий и управления большими данными.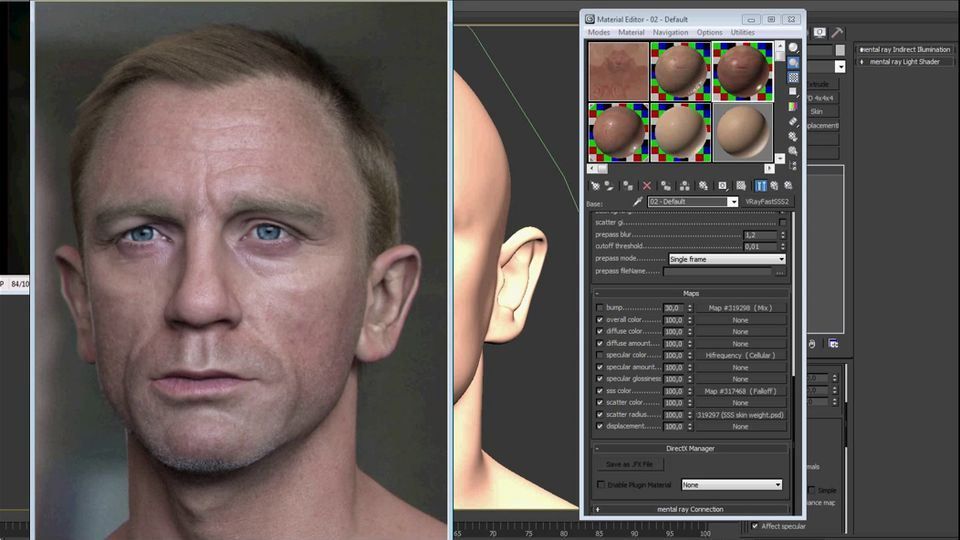
 е. текстур), что довольно часто бывает, если вы сделали фотографию на телефон. Существуют 3D-программы, предлагающие инструменты для создания подходящих файлов, такие как работа с разрешением, повышение резкости и так далее.
е. текстур), что довольно часто бывает, если вы сделали фотографию на телефон. Существуют 3D-программы, предлагающие инструменты для создания подходящих файлов, такие как работа с разрешением, повышение резкости и так далее. За короткое время они стали не только проще в использовании, но и лучше по качеству и надежности. Простота использования во всех приложениях также была значительно улучшена.
За короткое время они стали не только проще в использовании, но и лучше по качеству и надежности. Простота использования во всех приложениях также была значительно улучшена. нанять профессионального 3D-художника, который сделает это за вас. В этом руководстве мы перечислили все различные способы превращения ваших изображений в 3D-модель в зависимости от вашего бюджета, уровня навыков и вашей общей цели для вашего проекта.
нанять профессионального 3D-художника, который сделает это за вас. В этом руководстве мы перечислили все различные способы превращения ваших изображений в 3D-модель в зависимости от вашего бюджета, уровня навыков и вашей общей цели для вашего проекта. rocks
rocks Большинство моделей платные, но продаются по более низкой цене, чем на большинстве аналогичных ресурсов.
Большинство моделей платные, но продаются по более низкой цене, чем на большинстве аналогичных ресурсов. Сайт предлагает в основном технические и инженерные модели не предназначенные для 3D-печати. Так же сайт позволяет фильтровать базу моделей не только по категориям, но и по программам, в которых были созданы проекты. Сайт больше подойдёт для тех, кто ищет инженерные 3D-дизайны. Для доступа к базе и скачивания необходима авторизация.
Сайт предлагает в основном технические и инженерные модели не предназначенные для 3D-печати. Так же сайт позволяет фильтровать базу моделей не только по категориям, но и по программам, в которых были созданы проекты. Сайт больше подойдёт для тех, кто ищет инженерные 3D-дизайны. Для доступа к базе и скачивания необходима авторизация. Сайт позволяет сортировать базу данных для поиска моделей для 3D-печати. Необходимо поставить галочка ‘Only Show Printable Models’ в расширенной форме поиска. Большинство моделей может быть оптимизирована для печати через 3DPrintCloud.
Сайт позволяет сортировать базу данных для поиска моделей для 3D-печати. Необходимо поставить галочка ‘Only Show Printable Models’ в расширенной форме поиска. Большинство моделей может быть оптимизирована для печати через 3DPrintCloud. cgtrader.com/
cgtrader.com/
 Содержит базу бесплатных моделей для 3D-печати. В основном это сборная солянка как с популярных баз данных, так и загруженные модели пользователей ресурса. Так же содержит каталог платных моделей от участников портала.
Содержит базу бесплатных моделей для 3D-печати. В основном это сборная солянка как с популярных баз данных, так и загруженные модели пользователей ресурса. Так же содержит каталог платных моделей от участников портала. myminifactory.com/ru/
myminifactory.com/ru/ sketchup.com/
sketchup.com/
 Поскольку это не нишевое сообщество, вы можете найти на этой платформе почти все.
Поскольку это не нишевое сообщество, вы можете найти на этой платформе почти все.
 Наряду с современным сервисом CGTraders позволяет вам нанять дизайнера по вашему выбору.
Наряду с современным сервисом CGTraders позволяет вам нанять дизайнера по вашему выбору.
 Здесь вы можете скачать бесплатный или платный файл STL или поделиться своим файлом с другими. Вы также можете продать свой файл по предпочтительной цене на этой платформе.
Здесь вы можете скачать бесплатный или платный файл STL или поделиться своим файлом с другими. Вы также можете продать свой файл по предпочтительной цене на этой платформе.

 Загрузка продуктов на веб-сайт бесплатна, но когда дело доходит до покупки, Threeding взимает комиссию.
Загрузка продуктов на веб-сайт бесплатна, но когда дело доходит до покупки, Threeding взимает комиссию.

 Все они созданы вашими любимыми дизайнерами высшего класса, такими как Clerx, MaxLab, TOYMAKR3D, VanDragon_DE, 3DZipGuy или SimonRob.
Все они созданы вашими любимыми дизайнерами высшего класса, такими как Clerx, MaxLab, TOYMAKR3D, VanDragon_DE, 3DZipGuy или SimonRob.


 Это потому, что изобретатель проекта RepRap, Адриан Бойер, входит в совет директоров этого веб-сайта.
Это потому, что изобретатель проекта RepRap, Адриан Бойер, входит в совет директоров этого веб-сайта. На этом веб-сайте даже представлены составные роботизированные модели, которые помогают создать новое движение в культуре 3D-печати.
На этом веб-сайте даже представлены составные роботизированные модели, которые помогают создать новое движение в культуре 3D-печати.
 Помимо поисковых запросов, он предоставляет интересные статьи, связанные с 3D-печатью, и имеет довольно интерактивную домашнюю страницу.
Помимо поисковых запросов, он предоставляет интересные статьи, связанные с 3D-печатью, и имеет довольно интерактивную домашнюю страницу.
 И помните, как мы уже говорили вам ранее, что, когда вы получите свой 3D-принтер, все, что останется, — это материал, 3D-модели и ваша страсть! Итак, моделируйте, печатайте и выставляйте напоказ свои творения, присоединяясь к этим сообществам и наслаждайтесь бесплатными или премиальными файлами STL, предоставляемыми этими веб-сайтами.
И помните, как мы уже говорили вам ранее, что, когда вы получите свой 3D-принтер, все, что останется, — это материал, 3D-модели и ваша страсть! Итак, моделируйте, печатайте и выставляйте напоказ свои творения, присоединяясь к этим сообществам и наслаждайтесь бесплатными или премиальными файлами STL, предоставляемыми этими веб-сайтами.

 Иногда база данных может показаться немного менее организованной, чем более чистый и простой дизайн таких сайтов, как Pinshape и Cults.
Иногда база данных может показаться немного менее организованной, чем более чистый и простой дизайн таких сайтов, как Pinshape и Cults. Ищете ли вы архитектуру, дизайн продукта или масштабные модели, 3D Warehouse предлагает все, что было создано с помощью популярного программного обеспечения для 3D-моделирования SketchUp. К счастью, они также позволяют вам фильтровать свою базу данных для моделей для 3D-печати, выбрав «Показывать только модели для печати» в своей функции расширенного поиска. Все остальные модели можно сделать пригодными для печати благодаря подключению к 3DPrintCloud.
Ищете ли вы архитектуру, дизайн продукта или масштабные модели, 3D Warehouse предлагает все, что было создано с помощью популярного программного обеспечения для 3D-моделирования SketchUp. К счастью, они также позволяют вам фильтровать свою базу данных для моделей для 3D-печати, выбрав «Показывать только модели для печати» в своей функции расширенного поиска. Все остальные модели можно сделать пригодными для печати благодаря подключению к 3DPrintCloud. TurboSquid
TurboSquid 

 Доступно множество списков, но в этой статье основное внимание будет уделено сайтам, на которых есть большинство или, по крайней мере, большое количество моделей, разработанных специально для 3D-печати.
Доступно множество списков, но в этой статье основное внимание будет уделено сайтам, на которых есть большинство или, по крайней мере, большое количество моделей, разработанных специально для 3D-печати. Дизайнеры награждаются либо настоящими нитями, либо значками веб-сайтов.
Дизайнеры награждаются либо настоящими нитями, либо значками веб-сайтов.
 Эти модели могут быть бесплатными или платными, бесплатными для использования или по лицензии, но в основном вы найдете то, что ищете.
Эти модели могут быть бесплатными или платными, бесплатными для использования или по лицензии, но в основном вы найдете то, что ищете.
 Идеальные настройки для печати этой модели, по словам создателя, — разрешение 0,1 мм и 100% заполнение. Все части были оптимизированы для ориентации при печати, и их нужно будет склеить.
Идеальные настройки для печати этой модели, по словам создателя, — разрешение 0,1 мм и 100% заполнение. Все части были оптимизированы для ориентации при печати, и их нужно будет склеить.

 Вам также понадобятся шурупы 5 мм для крепления к стене, а также брус диаметром 28 мм.
Вам также понадобятся шурупы 5 мм для крепления к стене, а также брус диаметром 28 мм.

 Создатель не поделился многими настройками печати, но это можно напечатать с разрешением 0,2 мм и с заполнением 20%. Некоторые детали необходимо отшлифовать перед окончательной сборкой.
Создатель не поделился многими настройками печати, но это можно напечатать с разрешением 0,2 мм и с заполнением 20%. Некоторые детали необходимо отшлифовать перед окончательной сборкой. Удобное для пользователя программное обеспечение упрощает подготовку, планирование, мониторинг и создание отчетов о заданиях на печать. GrabCAD Print, который может считывать файлы САПР, обеспечивает эффективный рабочий процесс, упрощающий управление заданиями в условиях общего офиса и модельного магазина.
Удобное для пользователя программное обеспечение упрощает подготовку, планирование, мониторинг и создание отчетов о заданиях на печать. GrabCAD Print, который может считывать файлы САПР, обеспечивает эффективный рабочий процесс, упрощающий управление заданиями в условиях общего офиса и модельного магазина.
 Несмотря на то, что ее можно распечатать на 3D-принтере, создатель сделал эту модель довольно большой (150x150x50 мм), поэтому печатать ее не имеет смысла.
Несмотря на то, что ее можно распечатать на 3D-принтере, создатель сделал эту модель довольно большой (150x150x50 мм), поэтому печатать ее не имеет смысла._grut_3855183.jpg)
 Fab365 включает оценки времени печати для всех частей, поэтому вы точно знаете, во что ввязываетесь.
Fab365 включает оценки времени печати для всех частей, поэтому вы точно знаете, во что ввязываетесь.
 Он подходит для проектов VR и AR. Создатель не поделился, можно ли его распечатать или нет; однако пользователь напечатал эту модель на SLA-принтере, и она печатает отлично.
Он подходит для проектов VR и AR. Создатель не поделился, можно ли его распечатать или нет; однако пользователь напечатал эту модель на SLA-принтере, и она печатает отлично.
 д. Корпус выполнен из алюминиевого сплава, который обеспечивает надежную защиту от внешних воздействий. Прорезиненная рукоятка хорошо лежит в руке и не скользит в процессе проведения работ.
д. Корпус выполнен из алюминиевого сплава, который обеспечивает надежную защиту от внешних воздействий. Прорезиненная рукоятка хорошо лежит в руке и не скользит в процессе проведения работ.


 дюйм)
дюйм)
 дюйм)
дюйм)

 Netira CT Label Designer позволяет собирать эскизы только на принтерах Datamax.
Netira CT Label Designer позволяет собирать эскизы только на принтерах Datamax.

 Печайте фотографии из Facebook и Instagram, печатайте прямо на компакт-дисках, создавайте коллажи, нестандартные открытки, персональную почтовую бумагу и преобразовывайте свои фотографии в веселые раскраски.
Печайте фотографии из Facebook и Instagram, печатайте прямо на компакт-дисках, создавайте коллажи, нестандартные открытки, персональную почтовую бумагу и преобразовывайте свои фотографии в веселые раскраски. Приложение iPrint совместимо с большинством принтеров Epson, оснащенных подключением к локальной сети или Wi-Fi, включая устройства серий Epson Stylus Photo, Office и WorkForce Pro.
Приложение iPrint совместимо с большинством принтеров Epson, оснащенных подключением к локальной сети или Wi-Fi, включая устройства серий Epson Stylus Photo, Office и WorkForce Pro.
 Благодаря ему проекторы Epson стало еще удобнее использовать в офисе для демонстрации презентаций или проектов, а также в учебных учреждениях для наглядности образовательного процесса.
Благодаря ему проекторы Epson стало еще удобнее использовать в офисе для демонстрации презентаций или проектов, а также в учебных учреждениях для наглядности образовательного процесса.
 Вы можете заранее ввести все сетевые настройки и настройки проецирования, что может значительно сократить время и усилия, необходимые для установки нескольких проекторов.
Вы можете заранее ввести все сетевые настройки и настройки проецирования, что может значительно сократить время и усилия, необходимые для установки нескольких проекторов.
 Вы сможете выполнять предварительный просмотр результатов, отправлять отсканированные документы в нужном формате по электронной почте, а также в другие приложения и облачные сервисы, такие как DropBox®, Evernote®, Google Drive™ и Microsoft® OneDrive.
Вы сможете выполнять предварительный просмотр результатов, отправлять отсканированные документы в нужном формате по электронной почте, а также в другие приложения и облачные сервисы, такие как DropBox®, Evernote®, Google Drive™ и Microsoft® OneDrive.
 Для работы с ПО требуется спектрофотометр.
Для работы с ПО требуется спектрофотометр. Подходит для начинающих пользователей. Требует лицензии. В архиве содержится только обновление до последнией версии. Если вы устанавливаете программу первый раз, то сперва скачайте базовую версию на странице ПО.
Подходит для начинающих пользователей. Требует лицензии. В архиве содержится только обновление до последнией версии. Если вы устанавливаете программу первый раз, то сперва скачайте базовую версию на странице ПО.
 Подходит для начинающих пользователей. Требует лицензии. В архиве содержится только обновление до последнией версии. Если вы устанавливаете программу первый раз, то сперва скачайте базовую версию на странице ПО.
Подходит для начинающих пользователей. Требует лицензии. В архиве содержится только обновление до последнией версии. Если вы устанавливаете программу первый раз, то сперва скачайте базовую версию на странице ПО.
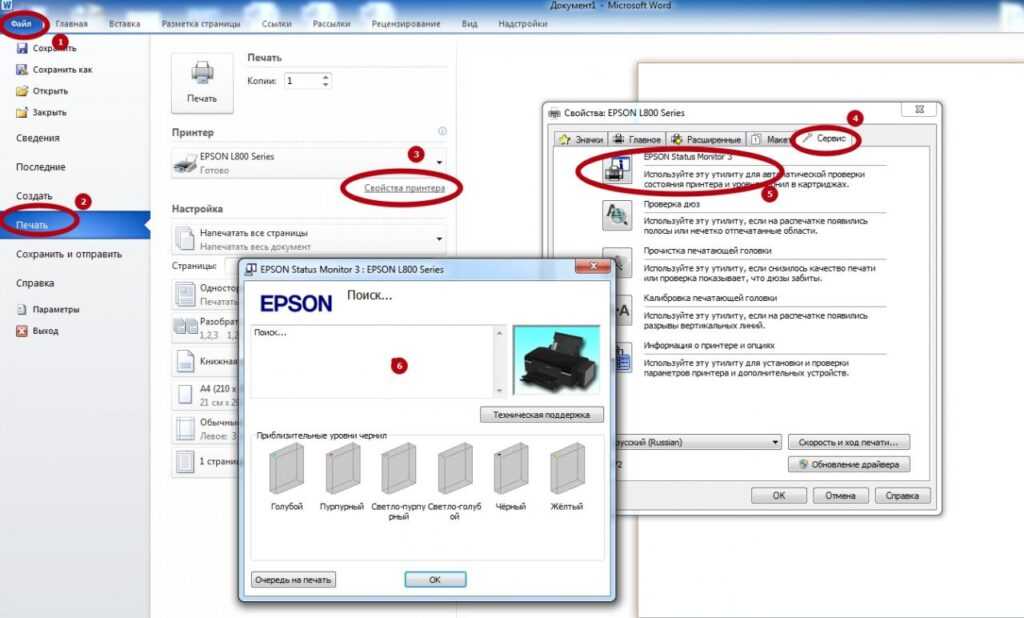
 С помощью данной программы можно отслеживать объемы печати на устройствах, следить за уровнем расходных материалов, своевременно обновлять прошивку на устройствах, а также своевременно устранять неисправности.
С помощью данной программы можно отслеживать объемы печати на устройствах, следить за уровнем расходных материалов, своевременно обновлять прошивку на устройствах, а также своевременно устранять неисправности.
 org/ListItem»>
org/ListItem»> org/ListItem»>
org/ListItem»> org/ListItem»>
org/ListItem»>
 org/ListItem»>
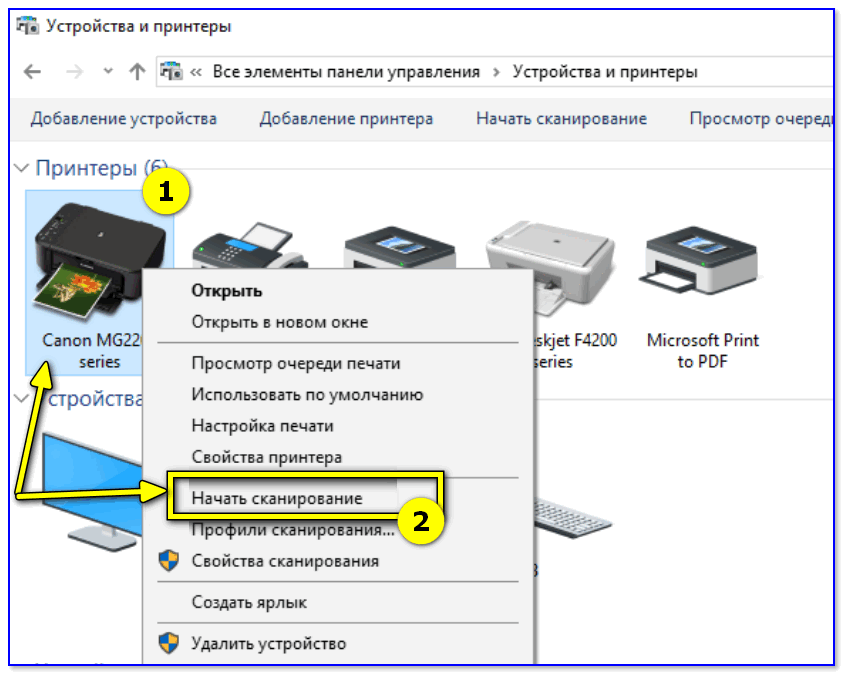
org/ListItem»> раздел Устранение неполадок с принтером, работающим в автономном режиме.
раздел Устранение неполадок с принтером, работающим в автономном режиме. д.). Эта страница также может помочь вам, если у вас есть струйный принтер или лазерный принтер.
д.). Эта страница также может помочь вам, если у вас есть струйный принтер или лазерный принтер. Обычно кнопка питания находится в правом переднем углу принтера. Однако расположение кнопки зависит от типа вашего принтера. У старых лазерных принтеров может быть даже выключатель питания в одном из задних нижних углов принтера.
Обычно кнопка питания находится в правом переднем углу принтера. Однако расположение кнопки зависит от типа вашего принтера. У старых лазерных принтеров может быть даже выключатель питания в одном из задних нижних углов принтера.

 Большой выбор доступных конфигураций. Возможность работы в одну, две смены или круглосуточно.
Большой выбор доступных конфигураций. Возможность работы в одну, две смены или круглосуточно. Гидростанция прижимает загруженное в бункер сырье к вращающимся фрезам. Измельченная щепа осыпается через сито. Крупные фракции подвергаются повторной переработке.
Гидростанция прижимает загруженное в бункер сырье к вращающимся фрезам. Измельченная щепа осыпается через сито. Крупные фракции подвергаются повторной переработке. При необходимости возможна ручная ил механизированная загрузка, в том числе и с помощью шнекового загрузчика.
При необходимости возможна ручная ил механизированная загрузка, в том числе и с помощью шнекового загрузчика. Их количество подбирается по индивидуальным заявкам с учетом потребностей конкретного предприятия.
Их количество подбирается по индивидуальным заявкам с учетом потребностей конкретного предприятия.
 Их применение вместо обычных дров в печах, каминах и дровяных котлах дает следующие преимущества:
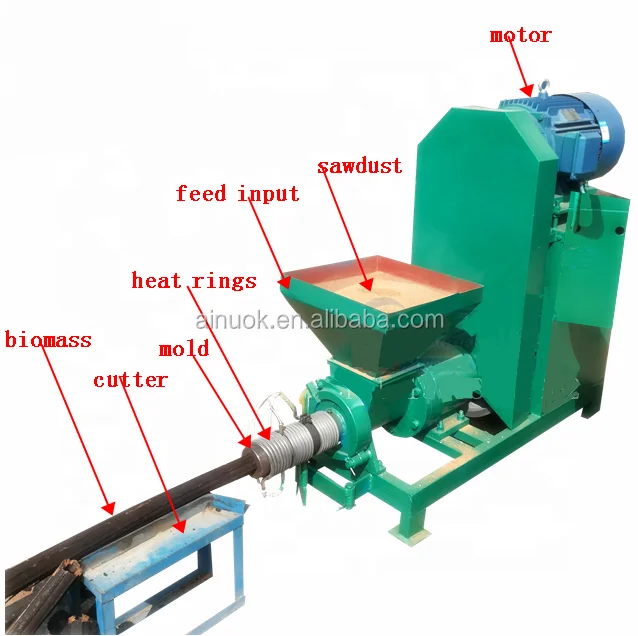
Их применение вместо обычных дров в печах, каминах и дровяных котлах дает следующие преимущества: Зачастую сырьем для изготовления брикетов служат отходы деревообработки – стружки, опилки, щепки. Крупные куски дерева измельчаются до состояния опилок размером не более 4 мм.
Зачастую сырьем для изготовления брикетов служат отходы деревообработки – стружки, опилки, щепки. Крупные куски дерева измельчаются до состояния опилок размером не более 4 мм.
 Опилки и стружка в чистом виде малопригодны для горения, а после обработки на станке для прессовки опилок из них выходит хорошее топливо.
Опилки и стружка в чистом виде малопригодны для горения, а после обработки на станке для прессовки опилок из них выходит хорошее топливо. Поэтому в сырье для самостоятельного брикетирования обязательно надо добавлять материалы, которые помогут связать, склеить сырье в монолитный брикет. Чаще всего для этих целей используют:
Поэтому в сырье для самостоятельного брикетирования обязательно надо добавлять материалы, которые помогут связать, склеить сырье в монолитный брикет. Чаще всего для этих целей используют: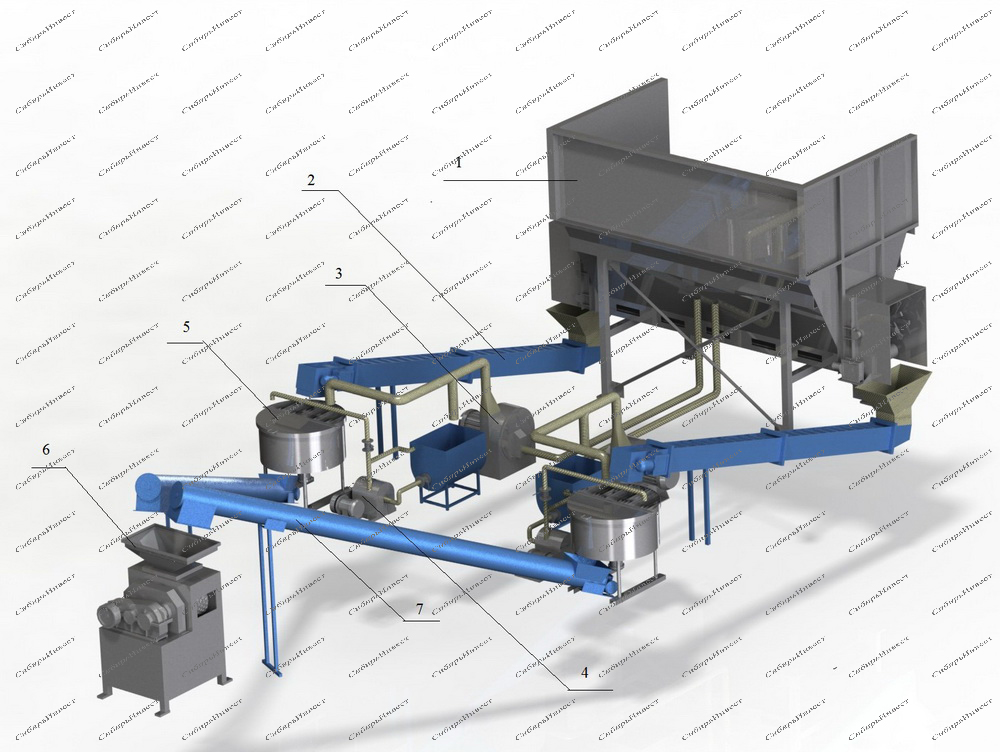 Сушат топливные брикеты уже после прессовки, чтобы они затвердели, держали форму и хорошо горели.
Сушат топливные брикеты уже после прессовки, чтобы они затвердели, держали форму и хорошо горели. Рычажные прессы работают быстрее. Нужно только продумать способ или механизм выталкивания готового брикета из прессовочной формы. В этой же форме должны быть отверстия для выхода воды при сдавливании, поскольку при ручном производстве сырье замачивается.
Рычажные прессы работают быстрее. Нужно только продумать способ или механизм выталкивания готового брикета из прессовочной формы. В этой же форме должны быть отверстия для выхода воды при сдавливании, поскольку при ручном производстве сырье замачивается. Форма матрицы, в которой будет прессоваться сырье, может быть круглой или прямоугольной. Для круглых форм можно использовать стальные трубы нужного диаметра.
Форма матрицы, в которой будет прессоваться сырье, может быть круглой или прямоугольной. Для круглых форм можно использовать стальные трубы нужного диаметра.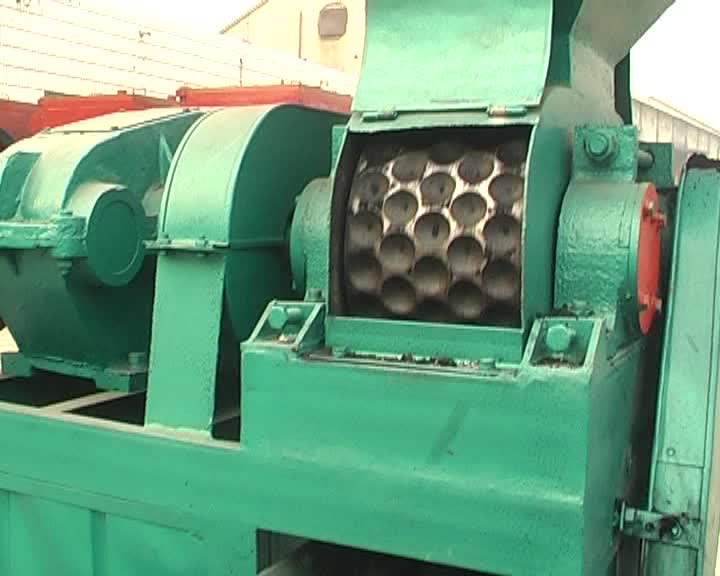 К ней приваривается пуансон, свободно входящий в матрицу. Другой конец штока крепится к гидравлическому механизму.
К ней приваривается пуансон, свободно входящий в матрицу. Другой конец штока крепится к гидравлическому механизму. Он может заменить традиционное угольное топливо, уменьшить загрязнение окружающей среды. топливный брикет из биомассы имеет преимущество высокой теплотворной способности, низкой стоимости, высокой плотности, небольшого объема, удобного хранения и транспортировки, санитарии и чистоты. При сжигании брикетного топлива из биомассы не образуется вредных газов, поэтому оно безопасно для окружающей среды. Кроме того, диапазон применения брикетировочной машины из биомассы очень широк, она подходит для промышленного производства электроэнергии, сельскохозяйственного производства, отопления, водоснабжения и других областей. Для защиты окружающей среды сыграла каталитическую роль.
Он может заменить традиционное угольное топливо, уменьшить загрязнение окружающей среды. топливный брикет из биомассы имеет преимущество высокой теплотворной способности, низкой стоимости, высокой плотности, небольшого объема, удобного хранения и транспортировки, санитарии и чистоты. При сжигании брикетного топлива из биомассы не образуется вредных газов, поэтому оно безопасно для окружающей среды. Кроме того, диапазон применения брикетировочной машины из биомассы очень широк, она подходит для промышленного производства электроэнергии, сельскохозяйственного производства, отопления, водоснабжения и других областей. Для защиты окружающей среды сыграла каталитическую роль. корм для жвачных животных. А вот кормовая трава и брикеты опилок всегда использовались в качестве топлива из биомассы. Поскольку топливо из биомассы удобно использовать и имеет меньше золы, его приветствуют дома и за рубежом.
корм для жвачных животных. А вот кормовая трава и брикеты опилок всегда использовались в качестве топлива из биомассы. Поскольку топливо из биомассы удобно использовать и имеет меньше золы, его приветствуют дома и за рубежом.
 Поэтому при использовании машины зазор между матрицей и прижимным роликом должен быть отрегулирован в минимальном диапазоне.
Поэтому при использовании машины зазор между матрицей и прижимным роликом должен быть отрегулирован в минимальном диапазоне.
 F. Nielsen поставила более 1000 машин во многие страны на всех 5 континентах.
F. Nielsen поставила более 1000 машин во многие страны на всех 5 континентах.  По сравнению с альтернативами брикеты удобны, выгодны и экологичны.
По сравнению с альтернативами брикеты удобны, выгодны и экологичны.
 Например, для брикетирования можно использовать солому, отходы ананаса, жмых сахарного тростника, березу, лиственницу и т.д.
Например, для брикетирования можно использовать солому, отходы ананаса, жмых сахарного тростника, березу, лиственницу и т.д. Он определяется как количество теплоты, выделяющееся при полном сгорании спрессованного топливного брикета и охлаждении продуктов сгорания. А высшая теплотворная способность, сокращенно GCV, относится к теплотворной способности с конденсацией воды в скрытой теплоте, также известной как более высокая теплотворная способность. Тогда как при сгорании теплота конденсации воды, содержащейся в топливе и образующаяся при сгорании, станет недоступной из-за испарения воды. И затем полезная теплотворная способность получается после вычитания теплоты конденсации воды из высшей теплотворной способности, которая называется чистой теплотворной способностью или низшей теплотворной способностью.
Он определяется как количество теплоты, выделяющееся при полном сгорании спрессованного топливного брикета и охлаждении продуктов сгорания. А высшая теплотворная способность, сокращенно GCV, относится к теплотворной способности с конденсацией воды в скрытой теплоте, также известной как более высокая теплотворная способность. Тогда как при сгорании теплота конденсации воды, содержащейся в топливе и образующаяся при сгорании, станет недоступной из-за испарения воды. И затем полезная теплотворная способность получается после вычитания теплоты конденсации воды из высшей теплотворной способности, которая называется чистой теплотворной способностью или низшей теплотворной способностью.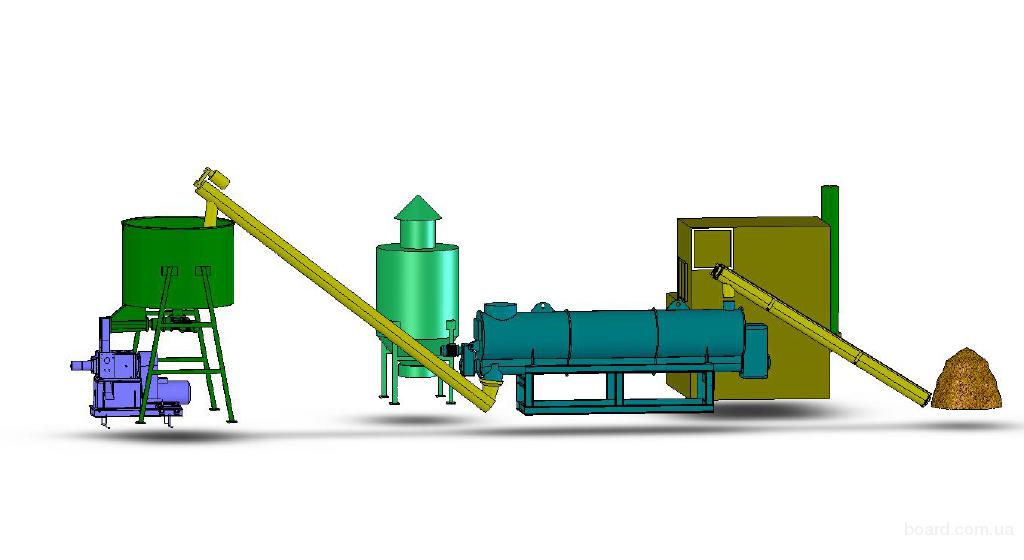
 F. Nielsen имеет возможность производить различные формы, типы и формы брикетов, которые адаптированы к конкретным запросам рынка из разных стран.
F. Nielsen имеет возможность производить различные формы, типы и формы брикетов, которые адаптированы к конкретным запросам рынка из разных стран.
 Характеризуется, во-первых, как инженерный, конструкционный материал высокой прочности и термостойкости от -15 гр. С. до +150 гр. С. Во-вторых, как точный и прочный материал, отвечающий высоким требованиям стабильности.
Характеризуется, во-первых, как инженерный, конструкционный материал высокой прочности и термостойкости от -15 гр. С. до +150 гр. С. Во-вторых, как точный и прочный материал, отвечающий высоким требованиям стабильности. Мы принимаем к оплате карты платежных систем VISA, Mastercard, МИР, JSB. Также вы можете для оплаты воспользоваться SberPay.
Мы принимаем к оплате карты платежных систем VISA, Mastercard, МИР, JSB. Также вы можете для оплаты воспользоваться SberPay.
 В список войдут самые продаваемые устройства в двух ценовых диапазонах (до 30 т.р. и до 60 т.р.). Будут представлены принтеры работающие как с пластиковым филаментом (FDM), так и с фотополимерами (LCD/DLP). Данный список всегда будет актуальным, так как периодически обновляется и дополн
В список войдут самые продаваемые устройства в двух ценовых диапазонах (до 30 т.р. и до 60 т.р.). Будут представлены принтеры работающие как с пластиковым филаментом (FDM), так и с фотополимерами (LCD/DLP). Данный список всегда будет актуальным, так как периодически обновляется и дополн  Все больше и больше людей во всем мире начинает увлекаться технологией трехмерной печати, поскольку с каждым днем она становится все доступнее и дешевле. Сейчас практически любой человек может позволить себе купить 3D принтер, и при помо
Все больше и больше людей во всем мире начинает увлекаться технологией трехмерной печати, поскольку с каждым днем она становится все доступнее и дешевле. Сейчас практически любой человек может позволить себе купить 3D принтер, и при помо 
 Новый состав, поставляемый в настоящее время, имеет HDT 238 °C при 0,45 МПа и улучшенное удлинение для снижения хрупкости.
Новый состав, поставляемый в настоящее время, имеет HDT 238 °C при 0,45 МПа и улучшенное удлинение для снижения хрупкости.


 Если бы у нас не было Form 2 [и High Temp Resin], мы бы не смогли этого добиться. Когда мы перешли на полный производственный цикл, мы были уверены, что это сработает».
Если бы у нас не было Form 2 [и High Temp Resin], мы бы не смогли этого добиться. Когда мы перешли на полный производственный цикл, мы были уверены, что это сработает».
 Однако это может зависеть от типа используемой смолы и условий, необходимых для их отверждения.
Однако это может зависеть от типа используемой смолы и условий, необходимых для их отверждения.


 Это может позволить вам создать модель, выдерживающую температуру до 1000 °C.
Это может позволить вам создать модель, выдерживающую температуру до 1000 °C.
 Это означает, что отпечатки становятся мягкими или податливыми при этой температуре и могут выгорать при более высоких температурах. Пользователь с тепловым пистолетом и лазерным термометром обнаружил, что смола Elegoo начинает трескаться при температуре около 200°C.
Это означает, что отпечатки становятся мягкими или податливыми при этой температуре и могут выгорать при более высоких температурах. Пользователь с тепловым пистолетом и лазерным термометром обнаружил, что смола Elegoo начинает трескаться при температуре около 200°C. 
 Эта смола также имеет низкую усадку, поэтому ваши модели сохраняют форму, в которой они были созданы.
Эта смола также имеет низкую усадку, поэтому ваши модели сохраняют форму, в которой они были созданы.
 Некоторые пользователи упомянули, что Formlabs использует довольно мощный УФ-лазер, поэтому, если вы собираетесь использовать его в своем полимерном принтере, увеличьте время экспозиции.
Некоторые пользователи упомянули, что Formlabs использует довольно мощный УФ-лазер, поэтому, если вы собираетесь использовать его в своем полимерном принтере, увеличьте время экспозиции.


 com
com Вместе с экспертами Valmet и правильными решениями вы сможете справиться с этой задачей. Как заявляют наши клиенты, Valmet может предоставить решения, позволяющие производить легкую бумагу с высокой скоростью и особенно с очень хорошей стабильностью. Мы можем предоставить производственные линии, отличающиеся хорошей производительностью, стабильностью и управляемостью в сочетании с низкими эксплуатационными расходами.
Вместе с экспертами Valmet и правильными решениями вы сможете справиться с этой задачей. Как заявляют наши клиенты, Valmet может предоставить решения, позволяющие производить легкую бумагу с высокой скоростью и особенно с очень хорошей стабильностью. Мы можем предоставить производственные линии, отличающиеся хорошей производительностью, стабильностью и управляемостью в сочетании с низкими эксплуатационными расходами. Наши клиенты используют энергосберегающие производственные линии мирового класса, использующие последние инновации рынка для производства легкого, но прочного тарного картона.
Наши клиенты используют энергосберегающие производственные линии мирового класса, использующие последние инновации рынка для производства легкого, но прочного тарного картона.


 Срок службы нового покрытия рулона составляет более 200 дней, что обеспечивает более высокую эксплуатационную готовность машины и лучшее качество бумаги.
Срок службы нового покрытия рулона составляет более 200 дней, что обеспечивает более высокую эксплуатационную готовность машины и лучшее качество бумаги. Его новая высокотехнологичная производственная линия PM10, управляемая командой высококвалифицированных специалистов, работающих с умом, чтобы производить лучший переработанный легкий лайнерный картон в Северной Америке, оснащена передовой технологией производства тарного картона, интегрированным заводом OCC и устойчивыми производственными процессами.
Его новая высокотехнологичная производственная линия PM10, управляемая командой высококвалифицированных специалистов, работающих с умом, чтобы производить лучший переработанный легкий лайнерный картон в Северной Америке, оснащена передовой технологией производства тарного картона, интегрированным заводом OCC и устойчивыми производственными процессами. Этот на 100% переработанный картон доказывает, что экологичность и высокое качество не исключают друг друга.
Этот на 100% переработанный картон доказывает, что экологичность и высокое качество не исключают друг друга.

 Прочные крепежи надежно удерживают мотор. На шкале выбиты риски, что позволяет контролировать рабочую глубину фрезы.
Прочные крепежи надежно удерживают мотор. На шкале выбиты риски, что позволяет контролировать рабочую глубину фрезы.
 В стандартный комплект поставки входят три подошвы. Чтобы избежать недоразумений, уточняйте все детали перед подтверждением покупки.
В стандартный комплект поставки входят три подошвы. Чтобы избежать недоразумений, уточняйте все детали перед подтверждением покупки.
 С помощью копировальной (направляющей) втулки 16 мм (артикул 344364-5 для погружного основания) или 10 мм (артикул 343577-5 для кромочного основания) фрезером можно вырезать одинаковые фигуры различной формы при помощи заранее изготовленного шаблона. Обе втулки входят в комплектацию. Особенность фрезера Makita RT0700CX2 заключается в том, что он поставляется в комплекте с тремя сменными основаниями. Основание кромочное (артикул 195560-6) позволяет обрабатывать кромки изделия при помощи фрез с подшипником. Основание кромочное наклонное (артикул 195561-4) позволяет обрабатывать кромки изделия и делать фаски пазовыми фрезами без подшипника. Основание для погружного фрезерования (артикул 195563-0) позволяет выполнять фрезеровку, врезаясь в любом месте изделия. Отдельно можно купить основание для фрезерования в углах (артикул 195562-2), которое позволяет производить работы на расстоянии от 18 мм от вертикальной поверхности. Фрезер Makita RT0700CX2 является настолько универсальным, что позволит выполнить практически любую работу, которую можно выполнять фрезером.
С помощью копировальной (направляющей) втулки 16 мм (артикул 344364-5 для погружного основания) или 10 мм (артикул 343577-5 для кромочного основания) фрезером можно вырезать одинаковые фигуры различной формы при помощи заранее изготовленного шаблона. Обе втулки входят в комплектацию. Особенность фрезера Makita RT0700CX2 заключается в том, что он поставляется в комплекте с тремя сменными основаниями. Основание кромочное (артикул 195560-6) позволяет обрабатывать кромки изделия при помощи фрез с подшипником. Основание кромочное наклонное (артикул 195561-4) позволяет обрабатывать кромки изделия и делать фаски пазовыми фрезами без подшипника. Основание для погружного фрезерования (артикул 195563-0) позволяет выполнять фрезеровку, врезаясь в любом месте изделия. Отдельно можно купить основание для фрезерования в углах (артикул 195562-2), которое позволяет производить работы на расстоянии от 18 мм от вертикальной поверхности. Фрезер Makita RT0700CX2 является настолько универсальным, что позволит выполнить практически любую работу, которую можно выполнять фрезером.
 После регулировки, надо снова крепко затянуть рычаг, чтобы закрепить основание инструмента. Глубина погружения фрезы может задаваться в пределах от 0 до 25 мм.
После регулировки, надо снова крепко затянуть рычаг, чтобы закрепить основание инструмента. Глубина погружения фрезы может задаваться в пределах от 0 до 25 мм. У основания для погружного фрезерования можно заменить одну из рукояток в виде грибка на удлинённую рукоятку, которая поставляется вместе с инструментом. Таким образом, увеличивается рычаг, и улучшается контроль над инструментом.
У основания для погружного фрезерования можно заменить одну из рукояток в виде грибка на удлинённую рукоятку, которая поставляется вместе с инструментом. Таким образом, увеличивается рычаг, и улучшается контроль над инструментом.
 Регулятор скорости расположен верхней части инструмента. Скорость вращения может задаваться 6 режимами. Скорость вращения можно регулировать в диапазоне от 10000 до 30000 оборотов в минуту. Такая функция позволяет подобрать необходимый режим для качественной обработки различных материалов для фрез различных размеров.
Регулятор скорости расположен верхней части инструмента. Скорость вращения может задаваться 6 режимами. Скорость вращения можно регулировать в диапазоне от 10000 до 30000 оборотов в минуту. Такая функция позволяет подобрать необходимый режим для качественной обработки различных материалов для фрез различных размеров. В сумке много отсеков и карманов для хранения. Удобный ремень позволяет переносить сумку на плече.
В сумке много отсеков и карманов для хранения. Удобный ремень позволяет переносить сумку на плече.

 Для получения информации о сборе и использовании информации на любом из этих веб-сайтов или других сторонних сайтах см. условия использования и политики, предусмотренные этими веб-сайтами.
Для получения информации о сборе и использовании информации на любом из этих веб-сайтов или других сторонних сайтах см. условия использования и политики, предусмотренные этими веб-сайтами.