3Д модель редуктора: 3D-модели различных редукторов и мотор-редукторов
3D-модели различных цилиндрических редукторов и мотор-редукторов
Редуктор одноступенчатый 6:1 3D-модель
Состав: 3D модель полная деталировка
Описание : Передаточное отношение 6:1
Софт: Компас-3D, IGES, STEP
Редуктор одноступенчатый косозубая передача 3D-модель
Состав: 3D модель полная деталировка
Описание : Межосевое — 160 мм.
Софт: Компас-3D, IGES, STEP
Редуктор одноступенчатый 3D-модель
Состав: 3D модель полная деталировка
Описание :Число зубьев: Z1=36, Z2=14
Софт: Компас-3D, IGES, STEP
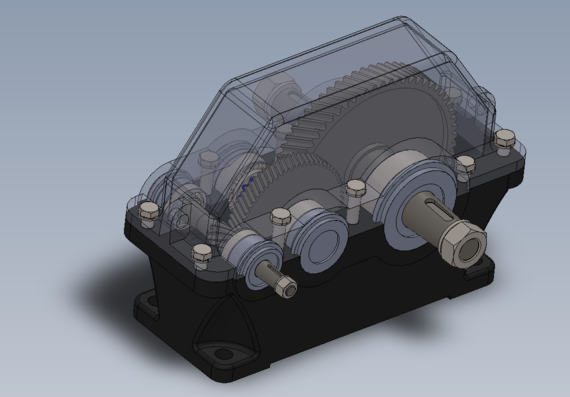
Редуктор цилиндрический двухступенчатый
Состав: 3D модель полная деталировка
Софт: Компас-3D, IGES, STEP
Соосно-цилиндрический мотор-редуктор MNHL — 50-2 — 3.
 07 — PAM160B5 — B3-1
07 — PAM160B5 — B3-1
Диаметр вала — 50 мм.
Состав: 3D модель габаритная
Софт: Компас-3D, IGES, STEP
3D-модель Мотор-редуктор цилиндрический RF27 DT80N2
Диаметр вала — 25 мм.
Состав: 3D модель габаритная
Софт: SolidWorks 2009, IGES, STP
Редукторный электродвигатель VEM ZG4 KMR
D-60 мм.
Состав: 3D модель габаритная
Софт: SolidWorks 2009, IGES, STP
Редуктор цилиндрический двухступенчатый 1-ц2у-160 ( Подробная модель)
Состав: 3D модель габаритная
Софт: SolidWorks 2009, IGES, STP
Редуктор цилиндрический двухступенчатый 1-ц2у-160 ( Подробная модель)
Состав: 3D модель габаритная
Софт: SolidWorks 2009, IGES, STP
Двухступенчатый косозубый цилиндрический редуктор
Состав: 3D модель (Деталировка)
Софт: SolidWorks 2009, IGES, STP
Редуктор цилиндрический двухступенчатый РМ-250-31,5-21У2
Состав: 3D модель (Габаритная модель)
Софт: SolidWorks 2009, IGES, STP
Редукторы цилиндрические 1Ц2У-100
Состав: 3D модель (деталировка)
Софт: SolidWorks 2009, IGES, STP
Мотор-редуктор 4МЦ2С-100 Ф
Состав: 3D модель (габаритная модель)
Софт: SolidWorks 2009, IGES, STP
Цилиндрический редуктор R107AM132S-M SEW Eurodrive1
Состав: 3D модель (габаритная модель)
Софт: SolidWorks 2009, IGES, STP
Цилиндрическиq мотор-редукторы в чугунном корпусе серии TR, TR108AM100
Состав: 3D модель (габаритная модель)
Софт: SolidWorks 2009, IGES, STP
Авторское приложение для КОМПАС-3D.
 Автоматизируем проектирование редукторов
Автоматизируем проектирование редукторов
Максим Кидрук
Развитие новых технологий постоянно ужесточает требования, предъявляемые к инженеру-конструктору. На первое место в современном конструировании выходят скорость и динамичность выполнения проектов (чертежей или моделей) в графическом редакторе, а также возможность быстрого внесения в них изменений без какого бы то ни было влияния на качество выполняемых работ или проектируемого объекта. Наверное, каждый инженер неоднократно сталкивался с задачей создания чертежа или модели на основе уже существующего, когда детали вроде бы и не очень различаются, но перерисовывать необходимо все заново. Для решения этой проблемы в системе КОМПАС-3D имеются средства параметризации, посредством которых можно задать определенные связи между отдельными элементами графического компонента, позволяющие при последующей разработке типовых конструкций не переделывать всю модель (чертеж), а изменить лишь несколько параметров. Это дает возможность многократно использовать единожды построенную модель, значительно сокращает время на формирование новых ее модификаций и т.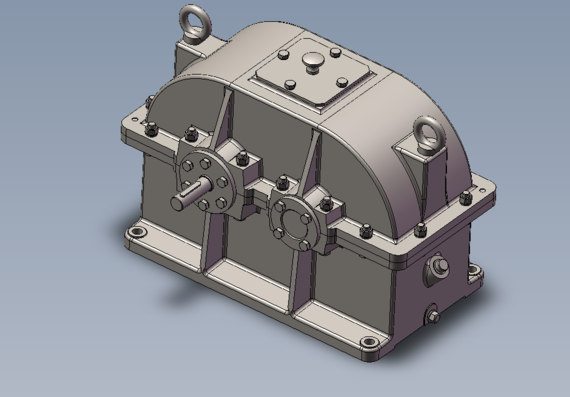 п.
п.
Но что делать, если одних средств параметризации недостаточно, если проектируемые новые 3D-модели хотя и схожи с эталоном, но имеют различия, не позволяющие использовать параметрические зависимости при построении? Например, когда какие-либо значения принимаются конструктивно или выбираются из справочников в зависимости от третьих величин? Иногда расчетные параметры модели изменяются дискретно (к примеру, модуль зубчатых колес всегда согласовывается со стандартными значениями и не может принимать значений, отличных от приведенных в ГОСТ) или не связаны аналитически ни с одним другим параметром. В этом случае на помощь приходят инструментальные средства разработки дополнительных модулей (прикладных библиотек) для КОМПАС-3D KompasAutomation, которые позволяют использовать всю мощь современного объектно-ориентированного программирования совместно с функциями КОМПАС для создания очень гибких и функциональных приложений. Хорошо владея одним из языков программирования и основами трехмерного моделирования в КОМПАС-3D, можно научиться самостоятельно разрабатывать различные по структуре программные модули под КОМПАС для решения широкого круга узкопрофильных задач конструирования. Такие приложения смогут производить сложные вычисления, самостоятельно выбирать необходимые параметры из баз данных, обмениваться данными с внешними приложениями и, как результат, строить 3D-модель или чертеж неограниченной сложности с учетом всех параметров.
Такие приложения смогут производить сложные вычисления, самостоятельно выбирать необходимые параметры из баз данных, обмениваться данными с внешними приложениями и, как результат, строить 3D-модель или чертеж неограниченной сложности с учетом всех параметров.
Конечно, практика разработки подключаемых модулей (plug-in) на языках Object Pascal, C++ и др. далеко не нова. Архитектура очень многих известных программ трехмерной графики формируется открытой, обеспечивая пользователям возможность самостоятельно расширять функциональность. Речь, в частности, идет об Adobe Photoshop, 3D Studio Max (некоторые plug-in к 3D Studio Max по своим возможностям даже превышают стандартные средства программы, к которой они подключаются) и др. В этой статье нам хотелось бы рассказать о создании проектно-конструкторских библиотек к системе КОМПАС-3D и о тех возможностях, которые предоставляет проектировщику их использование.
Рис. 1. Главное окно подключаемого модуля «РЕДУКТОР-3D V2. 1»
1»
Примером, который будет рассмотрен ниже, может служить написанный автором данной статьи на Delphi проект «РЕДУКТОР-3D V2.1» (рис. 1). Этот модуль может производить проектный расчет одноступенчатых редукторов трех видов: цилиндрического, конического или червячного, с последующим построением трехмерной модели (сборки) выбранного и рассчитанного редуктора в среде КОМПАС-3D. Данный проект носит академический характер, поскольку, несмотря на то что все методики расчета и параметры согласованы с ГОСТом, сами редукторы не привязаны к определенным условиям конкретного производства. Зато проект в полной мере демонстрирует возможности применения объектов автоматизации и то, насколько значимых результатов можно достичь в отдельно взятой отрасли машиностроения, расширив возможности КОМПАС-3D за счет использования подобного plug-in. Уровни функциональности и автоматизации проектов практически неограниченны все зависит лишь от фантазии, конструкторских навыков и профессионального уровня программистов разработчиков САПР.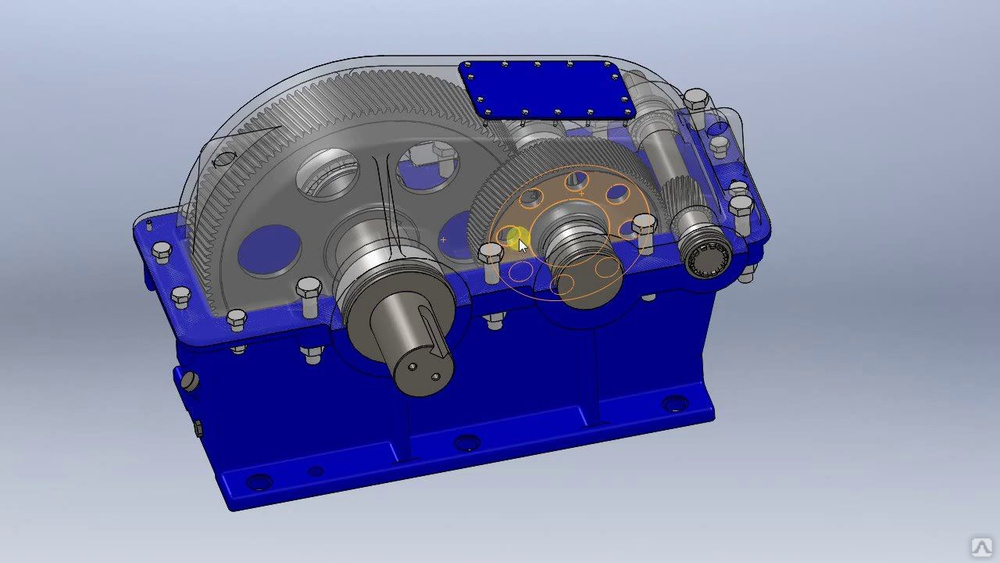 Судите сами исходными данными для производимых «РЕДУКТОРом» расчетов служат три числа: вращающий момент ведомого вала, его угловая скорость и передаточное число редуктора (правда, некоторые параметры перед построением можно изменить по желанию проектировщика, например число зубьев шестерни, угол наклона зубьев и др.). Все остальное программа проделает самостоятельно: определит геометрические характеристики, проведет проверочные расчеты, подберет подшипники и шпонки, выполнит компоновку редуктора. После всего этого библиотека готова к формированию 3D-модели. Без какого-либо вмешательства со стороны пользователя за считаные минуты будут построены все детали и сборочные единицы, входящие в редуктор, и создана сборка. Наглядные примеры того, что можно делать с помощью проектного модуля «РЕДУКТОР-3D V2.1», приведены на рис. 2 и 3 (заметьте, что разрезы в моделях также реализованы программно, а не вручную).
Судите сами исходными данными для производимых «РЕДУКТОРом» расчетов служат три числа: вращающий момент ведомого вала, его угловая скорость и передаточное число редуктора (правда, некоторые параметры перед построением можно изменить по желанию проектировщика, например число зубьев шестерни, угол наклона зубьев и др.). Все остальное программа проделает самостоятельно: определит геометрические характеристики, проведет проверочные расчеты, подберет подшипники и шпонки, выполнит компоновку редуктора. После всего этого библиотека готова к формированию 3D-модели. Без какого-либо вмешательства со стороны пользователя за считаные минуты будут построены все детали и сборочные единицы, входящие в редуктор, и создана сборка. Наглядные примеры того, что можно делать с помощью проектного модуля «РЕДУКТОР-3D V2.1», приведены на рис. 2 и 3 (заметьте, что разрезы в моделях также реализованы программно, а не вручную).
Рис. 2. Цилиндрический шевронный редуктор, построенный
с помощью библиотеки «РЕДУКТОР-3D V2. 1»
1»
Рис. 3. Конический редуктор, спроектированный
в библиотеке «РЕДУКТОР-3D V2.1»
Сколько бы у вас ушло времени на моделирование изображенных на рисунках механизмов вручную, даже при достаточном опыте работы в КОМПАС-3D? День-два, не меньше (это еще без учета времени на проектный и проверочный расчеты, предшествующие моделированию). Тогда как при помощи описанной здесь подключаемой библиотеки все построение обоих редукторов не превысило и 10 минут!
Верится с трудом? Убедитесь сами: скачать библиотеку «РЕДУКТОР-3D V2.1» можно на официальном сайте компании АСКОН (www.ascon.ru) в разделе «Техническая поддержка бесплатное ПО».
Разумеется, на то, чтобы «научить» программу автоматически создавать такие сборки, потребовалось немало времени, но это уже головная боль программистов САПР, а не инженеров. Хотя без помощи опытных конструкторов разработчикам программного обеспечения никак не обойтись, ведь помимо досконального знания приемов объектно-ориентированного программирования нужно неплохо разбираться в сопромате, теоретической механике, основах конструирования и многих других предметных науках.
Остановимся более подробно на некоторых деталях программной реализации формирования сборки в КОМПАС-3D на примере уже знакомой вам программы расчета и проектирования редукторов. На мой взгляд, изложенный далее материал будет интересен не только узкому кругу разработчиков программного обеспечения под КОМПАС, но и широкой аудитории инженеров, поскольку множество реализованных программно подходов к формированию сборки способны впоследствии оказывать серьезную помощь при создании схожих сборок вручную.
Хотелось бы поделиться секретами создания графической трехмерной модели зубчатого зацепления. Казалось бы, здесь все просто: создаем 3D-модели колеса и шестерни, вставляем в сборку и… Возможно, опытному пользователю и не составит труда, используя команды панели «Сопряжения», соединить зубчатые колеса так, чтобы они соприкасались точно по линии зацепления и зубья не «зарывались» друг в друга, даже если зацепление косозубое. Но что делать программисту, который, по сути, формирует сборку «вслепую»? Как быть, когда количество зубьев, модуль зацепления, угол наклона зубьев выражены переменными и каждый раз могут принимать различные значения? Ведь при любых параметрах, введенных пользователем или рассчитанных по алгоритму, программа должна не только корректно строить модели зубчатых колес, но и правильно осуществлять их сборку.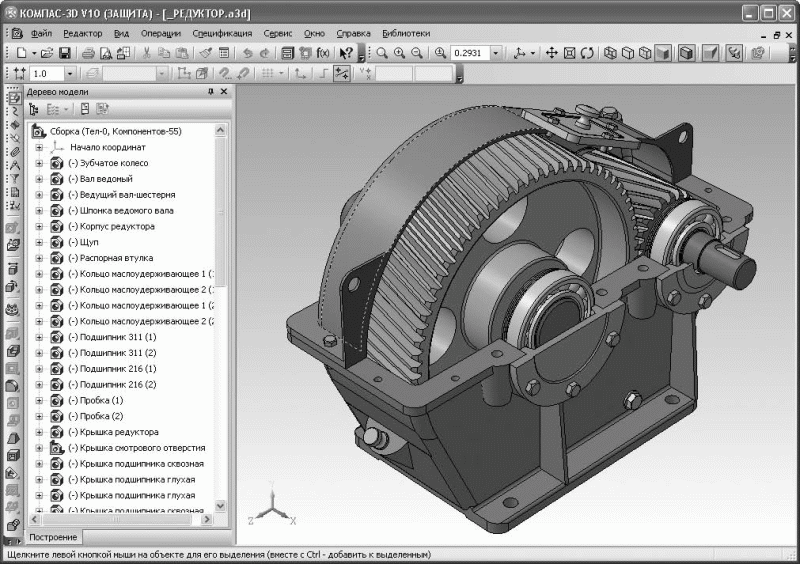
Здесь я считаю нужным, не вдаваясь в подробности, сказать несколько слов о том, как именно в моей программе реализовано построение самих колес чтобы читателю было понятнее, о чем дальше пойдет речь. Зубчатый венец формируется копированием по концентрической сетке выреза между зубьями в заготовке зубчатых колес, имитируя работу зубонарезного инструмента (количество копий равно количеству зубьев). Сам вырез создается с помощью операции вырезания выдавливанием для прямозубых колес или с помощью операции вырезания по сечениям для косозубых (рис. 4).
Рис. 4. Создание зубьев цилиндрического колеса с помощью операции вырезания
Теперь можно приступать к решению ранее поставленной задачи, то есть собственно формирования зубчатого зацепления. Сначала на ум приходит, казалось бы, неплохая идея после вставки деталей в сборку повернуть колесо или шестерню в вертикальной плоскости на определенный угол таким образом, чтобы зубья вошли в зацепление.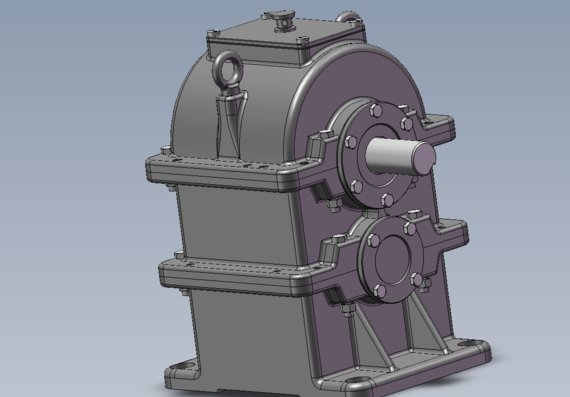 Но не забывайте, что мы создаем сборку программно. При попытке точно определить значение угла поворота нужно будет учитывать то, что количество зубьев и шестерни, и колеса может быть как парным, так и непарным (в зависимости от передаточного числа редуктора), а также что даже при одинаковом количестве зубьев, но при разных модулях диаметр колес будет разным. Записать однозначную аналитическую зависимость определения угла поворота от перечисленных параметров (модуль, диаметр, число зубьев обеих колес) для меня оказалось непосильной задачей, и я сомневаюсь, существует ли такая зависимость вообще…
Но не забывайте, что мы создаем сборку программно. При попытке точно определить значение угла поворота нужно будет учитывать то, что количество зубьев и шестерни, и колеса может быть как парным, так и непарным (в зависимости от передаточного числа редуктора), а также что даже при одинаковом количестве зубьев, но при разных модулях диаметр колес будет разным. Записать однозначную аналитическую зависимость определения угла поворота от перечисленных параметров (модуль, диаметр, число зубьев обеих колес) для меня оказалось непосильной задачей, и я сомневаюсь, существует ли такая зависимость вообще…
На самом деле есть значительно более простой способ, позволяющий не вводить в программу лишних расчетов и даже не изменять положения колес после вставки их в сборку, формируя зацепление на этапе проектирования отдельных деталей, а не сборки. Вы уже наверняка догадались, в чем дело. Необходимо так сформировать зубчатый венец колеса и шестерни, чтобы на оси, соединяющей центры колес, с одной стороны (например, на шестерне) всегда размещался зуб, а с другой (на колесе) вырез. Таким образом, вырезать первым нужно именно ту пару зубьев, которая и будет находиться в зацеплении в собранной передаче, что позволит при сборке просто вставить модели и ничего не подгонять. Задача свелась к построению эскизов вырезов, которые будут соприкасаться в одной точке, если нарисовать их в одной плоскости, но на самом деле они будут размещены в разных моделях. Добиться этого совсем не сложно: точку зацепления следует разместить на линии центров, а эскизы вырезов вычертить по обе стороны этой линии, привязываясь к точке зацепления, но отдельно для шестерни и колеса. Думаю, рис. 5 поможет лучше разобраться в этом. Если у вас все равно возникли вопросы, запустите библиотеку «РЕДУКТОР-3D V2.1», создайте модель цилиндрического редуктора и рассмотрите размещение эскизов в зубчатом зацеплении. После этого, думаю, все вопросы должны исчезнуть.
Таким образом, вырезать первым нужно именно ту пару зубьев, которая и будет находиться в зацеплении в собранной передаче, что позволит при сборке просто вставить модели и ничего не подгонять. Задача свелась к построению эскизов вырезов, которые будут соприкасаться в одной точке, если нарисовать их в одной плоскости, но на самом деле они будут размещены в разных моделях. Добиться этого совсем не сложно: точку зацепления следует разместить на линии центров, а эскизы вырезов вычертить по обе стороны этой линии, привязываясь к точке зацепления, но отдельно для шестерни и колеса. Думаю, рис. 5 поможет лучше разобраться в этом. Если у вас все равно возникли вопросы, запустите библиотеку «РЕДУКТОР-3D V2.1», создайте модель цилиндрического редуктора и рассмотрите размещение эскизов в зубчатом зацеплении. После этого, думаю, все вопросы должны исчезнуть.
Рис. 5. Размещение эскизов вырезов при программном моделировании зубчатого зацепления
Такой подход в трехмерном моделировании сложных механизмов может помочь как программисту, так и инженеру-конструктору. Ведь разумно выбранный способ построения отдельных деталей проектируемого агрегата способен в дальнейшем значительно упростить сборку.
Ведь разумно выбранный способ построения отдельных деталей проектируемого агрегата способен в дальнейшем значительно упростить сборку.
После того как созданы вырезы с помощью выдавливания или операции по сечениям при любых значениях модуля, числа зубьев, передаточного числа или угла наклона зубьев, вы получите очень точную модель зубчатого зацепления. Чтобы еще больше усовершенствовать программу, можно строить шестерню не в начале координат, а сместив ее на величину межосевого расстояния a w по одной из координатных осей (у меня это ось Z ). Это нисколько не усложнит процесс моделирования шестерни, зато вся программная сборка ограничится в этом случае двумя-тремя инструкциями вставки 3D-модели колес из соответствующих файлов. По умолчанию все детали установятся в точку начала системы координат, но поскольку шестерня «подвинута» на величину a w , то сборка произойдет сама собой!
Рис. 6. Модель косозубого зубчатого
зацепления
Рис. 7. Зубчатое коническое колесо и плоскость, содержащая эскиз для формирования выреза зубов
7. Зубчатое коническое колесо и плоскость, содержащая эскиз для формирования выреза зубов
Не меньший интерес представляет сборка конических колес. Здесь ситуацию значительно усложняют конструктивные особенности конического зацепления, в котором оси колес пересекаются в пространстве под прямым углом. Сама форма конических зубчатых колес достаточно сложна для моделирования. Плоскость, содержащая эскиз для выреза проточки между зубьями, должна быть касательной к боковой поверхности колеса, что имеет форму усеченного конуса, для того, чтобы вырезание выдавливанием формировалось в направлении образующей делительного конуса. В результате простое рисование и размещение эскиза доставит немало трудностей программисту, решившему создать приложение, моделирующее конические колеса. Но, допустим, все это уже позади и ваш модуль успешно создает и трехмерные модели, и колеса, и шестерни. Как собрать их в один механизм, именуемый зубчатой конической передачей?
Скажу сразу: методика создания этой сборки не будет отличаться от той, что применялась для цилиндрической передачи. То есть желательно сразу же строить зубчатые колеса таким образом, чтобы при вставке в сборку они автоматически вошли в зацепление. На словах все просто, а на практике процесс оказался гораздо более сложным.
То есть желательно сразу же строить зубчатые колеса таким образом, чтобы при вставке в сборку они автоматически вошли в зацепление. На словах все просто, а на практике процесс оказался гораздо более сложным.
Внимательно присмотревшись к структуре конического зацепления, легко увидеть, что эскизы вырезов, прилегающих к паре зубьев, которые будут находиться в зацеплении, размещены в разных плоскостях (рис. 8). В отличие от цилиндрической передачи, где оба эскиза лежали в одной торцевой плоскости и при их построении можно было легко привязаться к точке зацепления, в коническом редукторе сложно определить местоположение этой точки в пространстве, общее для обоих эскизов при их построении в разных плоскостях. Можно, конечно, начать решать задачу «в лоб» и попробовать рассчитать угловое смещение одной плоскости относительно другой, а также местоположение в них эскизов. Честно говоря, не видя иного выхода, поначалу я так и сделал. Но, тщетно провозившись дня два, переписав не один десяток строк программного кода, я ни на шаг не сдвинулся с мертвой точки. Программа прекрасно моделировала отдельно шестерню и колесо, но упрямо отказывалась правильно складывать сборку. Окончательно запутавшись в расчетах, я понял, что нужно искать другой выход… И нашел его! Как всегда бывает, выход этот оказался невероятно простым!
Программа прекрасно моделировала отдельно шестерню и колесо, но упрямо отказывалась правильно складывать сборку. Окончательно запутавшись в расчетах, я понял, что нужно искать другой выход… И нашел его! Как всегда бывает, выход этот оказался невероятно простым!
Один мой друг когда-то сказал: «Хороший программист ленивый программист»… Действительно, иногда, столкнувшись со сложной задачей, стоит сесть и подумать, прежде чем начинать что-либо делать. Поверьте это может серьезно сэкономить вам время.
Итак, я думал о том, что построение одной плоскости не представляет затруднений. Но каким образом привязать к ней вторую плоскость, я не знал. Вдруг меня осенило: плоскость эскиза выреза зуба колеса и плоскость эскиза профиля зуба шестерни, находящиеся в зацеплении, совпадают! То есть, вы построили, например, плоскость в модели колеса, касательную к торцевой поверхности и содержащую эскиз выреза между зубами. Так вот, в этой же плоскости, но уже в модели шестерни, следует разместить эскиз, но не выреза, а профиля зуба! Проще говоря, на коническом колесе зубчатый венец мы будем вырезать, а на шестерне «приклеивать».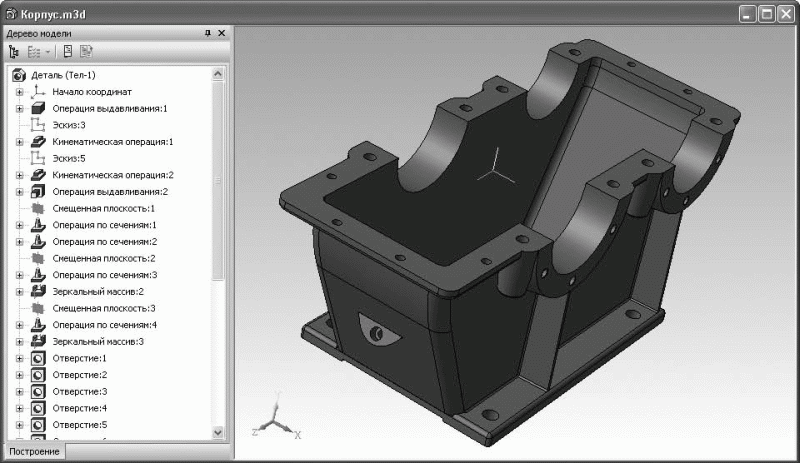 При этом начинать следует опять-таки с того выреза в колесе и с того зуба шестерни, которые будут в зацеплении в сборке, а затем делать их копию по концентрической сетке. Для наглядности приведу один пример (рис. 9).
При этом начинать следует опять-таки с того выреза в колесе и с того зуба шестерни, которые будут в зацеплении в сборке, а затем делать их копию по концентрической сетке. Для наглядности приведу один пример (рис. 9).
Рис. 8. Зубчатое коническое зацепление
Рис. 9. Модели конического колеса с одним вырезом
и конической шестерни с одним зубом
Этот пример вдвойне интересен: помимо демонстрации того, насколько может упроститься сборка вследствие грамотного построения деталей, он показывает, как важно иногда использовать нетрадиционный подход к процессу создания трехмерных моделей. Воображение инженера подсказывает ему способы моделирования деталей, зачастую имитирующие различные методы обработки заготовок (нарезание, точение, штамповка, литье и др.). На самом деле, иногда полезно отойти от стереотипов и начать мыслить абстрактно, не по шаблону, видя перед собой лишь конечный результат готовую модель, а не стандартные пути к ее созданию. В реальной жизни зубчатые колеса изготавливаются, как правило, литьем или штамповкой, а потом в них фрезой вырезается зубчатый венец. И при моделировании (как вручную, так и программно) мы волей-неволей повторяем (имитируем) те же операции. Пример с конической шестерней показал, как нетипичный подход к созданию модели до предела упростил сборку передачи, а сама модель при этом ничуть не пострадала.
В реальной жизни зубчатые колеса изготавливаются, как правило, литьем или штамповкой, а потом в них фрезой вырезается зубчатый венец. И при моделировании (как вручную, так и программно) мы волей-неволей повторяем (имитируем) те же операции. Пример с конической шестерней показал, как нетипичный подход к созданию модели до предела упростил сборку передачи, а сама модель при этом ничуть не пострадала.
Рис. 10. 3D-модель конической шестерни
с «приклеенными» зубьями
Рис. 11. Червячный редуктор
Рис. 12. Создание модели вала-червяка
Было бы несправедливо не упомянуть еще об одном типе механических передач, проектирование которых реализовано в подключаемой библиотеке «РЕДУКТОР-3D V2.1». Речь идет о червячных редукторах. Червячное зацепление также задача не из простых, но после всего вышеизложенного создание сборки больше не представляется таким уж сложным делом.
Витки вала-червяка можно сформировать с помощью кинематического вырезания. В качестве траектории вырезания следует взять объект «спираль цилиндрическая» с параметрами, подобранными таким образом, чтобы угол подъема спирали был равен углу подъема витков червяка, а ее диаметр делительному диаметру червяка. Суть программной сборки заключается в определении такого положения эскиза для кинематической операции, чтобы после вырезания витки червяка вошли точно между зубьями червячного колеса (считаем, что на вертикальной оси червячного колеса всегда будет находиться вырез между зубьями). В этом случае особенно изощряться не приходится смещение эскиза несложно рассчитать аналитически. На рис. 13 видно, что расстояние, на которое нужно сместить эскиз, можно принимать как 2,5·P или 3,5·P, где P шаг витков червяка, рассчитывается по формуле P = р·m, а m модуль червячного зацепления. Желательно принимать значение с запасом (3,5·P), поскольку длина нарезной части червяка может быть разной.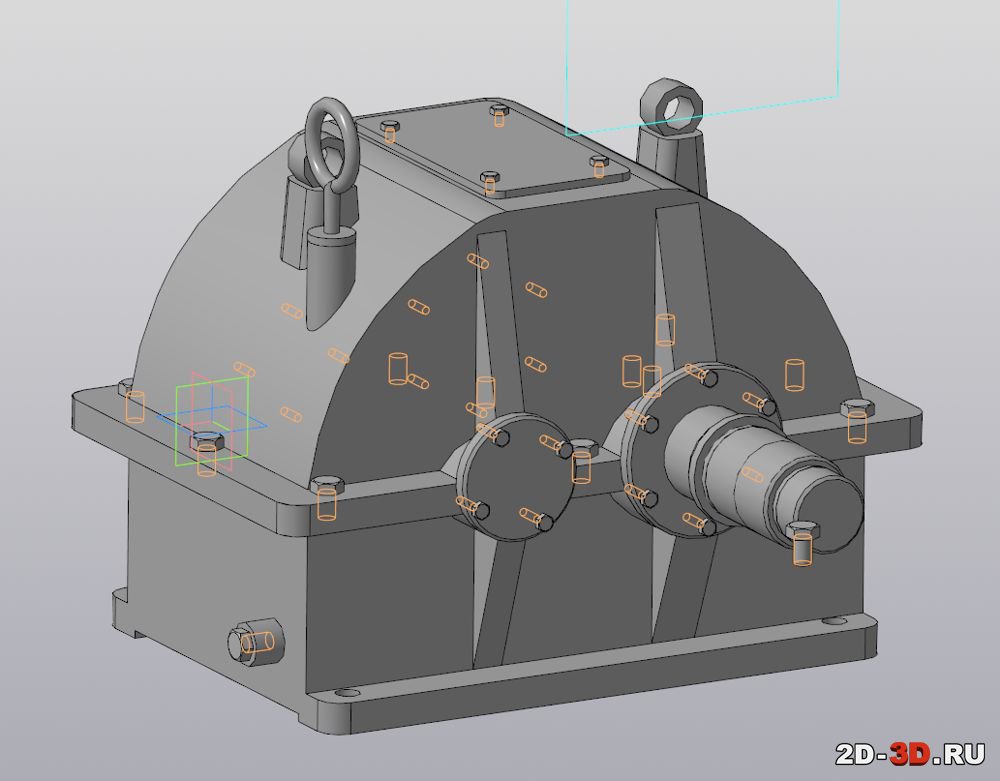 Полученная сборка представлена на рис. 14.
Полученная сборка представлена на рис. 14.
Рис. 13. Размещение эскиза для кинематического вырезания витков червяка
Рис. 14. Червячное зацепление
В заключение хочу отметить, что возможности автоматизации на основе системы КОМПАС-3D практически безграничны. С помощью современных языков объектно-ориентированного программирования можно создавать гибкие функциональные приложения, способные обеспечить значительную экономию времени и сил на формирование трехмерных моделей и сборок. Подключаемые модули могут быть полезны при серийном производстве (с их помощью можно в считаные минуты получить готовые сборки любого из выпускаемых агрегатов, размеры которых будут занесены в базу данных), использоваться при проектировании новых механизмов (в расчетную часть библиотеки можно включать циклы оптимизации различных параметров с тем, чтобы программа сама находила оптимальный вариант построения), а также для любых других целей в отдельно взятых отраслях машиностроения. Расширение сферы использования конструкторских библиотек и их функциональности значительно упростит работу инженера-проектировщика, а появление все новых библиотек позволит абстрагироваться от рутинной работы и сосредоточиться исключительно на конструировании. Возможно, уже в недалеком будущем, благодаря обширному арсеналу конструкторских библиотек, работа по созданию громоздких трехмерных сборок превратится в увлекательную игру наподобие конструктора. Ведь большая часть рутинной и малоэффективной работы будет быстро выполняться посредством подключаемых модулей. На мой взгляд, КОМПАС-3D одна из наиболее продвинутых графических систем в плане внедрения новых решений в сфере автоматизации и развития трехмерной графики в целом.
Расширение сферы использования конструкторских библиотек и их функциональности значительно упростит работу инженера-проектировщика, а появление все новых библиотек позволит абстрагироваться от рутинной работы и сосредоточиться исключительно на конструировании. Возможно, уже в недалеком будущем, благодаря обширному арсеналу конструкторских библиотек, работа по созданию громоздких трехмерных сборок превратится в увлекательную игру наподобие конструктора. Ведь большая часть рутинной и малоэффективной работы будет быстро выполняться посредством подключаемых модулей. На мой взгляд, КОМПАС-3D одна из наиболее продвинутых графических систем в плане внедрения новых решений в сфере автоматизации и развития трехмерной графики в целом.
|
Максим Кидрук Студент Национального университета водного хозяйства
|
 Сертифицированный специалист
Сертифицированный специалист
САПР и графика 11`2005
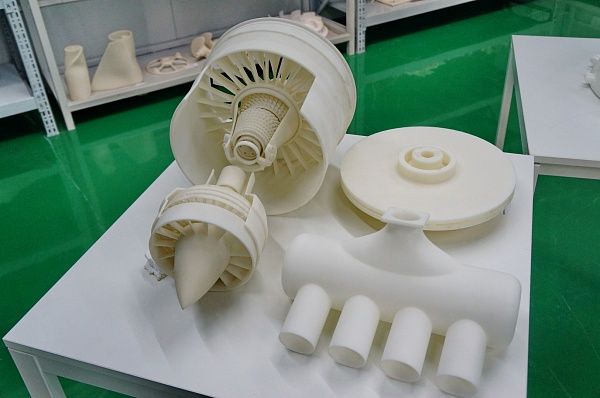
3D-принтер с коробкой передач
— 3DXTECH
Gearbox™ HT2 печатает из широкого спектра материалов, включая PEEK, PEKK, Ultem PEI.
- вкладка-1
- вкладка-2
- вкладка-3
- вкладка-4
- вкладка-5
- tab-6
Большая рабочая камера с подогревом
Прецизионное управление для печати ультраполимерами
- Камера с активным нагревом до 250ºC
- Идеально подходит для печати на таких материалах, как Ultem™ PEI, PPSU и PEEK
- Повышенная прочность деталей и стабильность размеров
- Огромный 18″ x 18″ x 32″ [объем 10 368 дюймов³]
- Печать крупных деталей или нескольких мелких деталей
Двойной высокотемпературный экструдер
Идеально подходит для сложных деталей из нескольких материалов [Модель + Поддержка]
- Температура экструдера до 500º C для печати ультраполимерами
- Бесступенчатая система подъема сопла для модели печати и поддержки
- Закаленная система, предназначенная для углеродных и стеклянных волокон
- Модели и вспомогательные сопла для доставки сложных деталей
- Печать с действительно водорастворимыми носителями — без агрессивных химикатов
Простой в использовании ЧМИ
Большой сенсорный экран с простой в использовании навигацией
- Интуитивно понятный 7-дюймовый сенсорный экран
- Простые в использовании и интерпретации функции
- Простая пошаговая навигация для печати
- Простой мониторинг всех основных систем
- При необходимости отрегулируйте, чтобы сократить количество отпечатков и сократить время простоя
Большая платформа сборки с вакуумной защитой
Проверенная временем система – надежные и воспроизводимые результаты
- Бесконтактное автоматическое выравнивание кровати
- Прочные монтажные листы с вакуумной защитой
- Платформа для сборки, нагретая до 225°C
- Простая замена сборочных листов между отпечатками
- Отличная адгезия оттиска к строительным листам
Отсеки для активно просушенных нитей
Полностью интегрированная система управления материалами
- Большой объем нити до 16 кг [≈ 900 дюймов³]
- Поддерживаемые отсеки для нитей, чтобы высококачественные материалы оставались сухими
- Система влагопоглотительной сушки для непрерывного регулирования влажности в отсеках для филамента
- Автоматический загрузчик нити для облегчения запуска новых отпечатков
- Непрерывная автоматическая сборка с автоматическим переключением барабанов
Высокоскоростная сервосистема
Прецизионная разработка для быстрой и точной сборки
- Скорость — скорость печати +300 мм/с
- Точность – точные характеристики и интеграция
- Надежность – проверенная система перемещения промышленного класса
- Повторяемость — максимальная производительность и время безотказной работы
- Continuous — автоматическая печать для длинных сборок
Получите предложение сейчас
Получите предложение сейчас
Поднимите печать на новый уровень
Пожалуйста, заполните форму сегодня, чтобы заказать Gearbox™ HT2 и получить дополнительную информацию.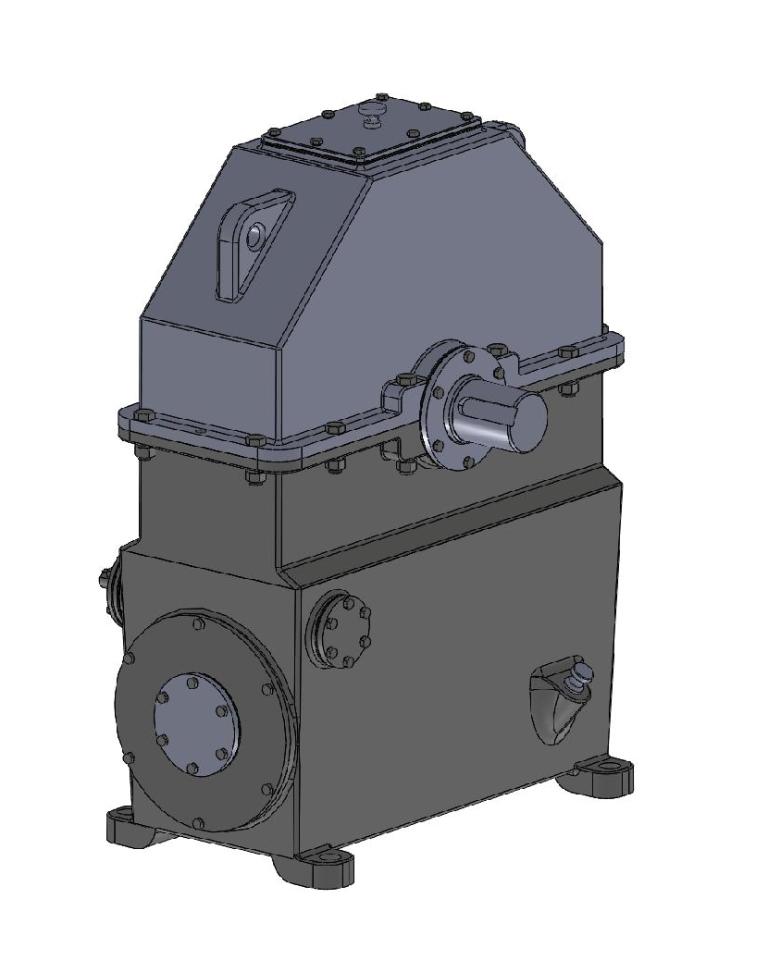
Получите расчет стоимости принтера Gearbox HT2
Gearbox лучшие модели для 3D-печати・Культы
Фильтровать по:
Безопасный
Бесплатно
Лучший
В продаже
С марками
Сортировать по:
ДатаЦенаЗагрузкиНравится
💡
Помощь в поиске
Слишком много результатов? Вы можете попробовать еще раз:
- , написав ключевые слова в кавычках 9.0167 «…» указать поиск
- , написав дефис
-перед термином, чтобы удалить конкретный термин из поиска - , написав
от:и имя дизайнера, чтобы отфильтровать поиск по имени дизайнера - , написав номер конструкции для поиска конкретной конструкции
Среди этих результатов вы обнаружили один или несколько дизайнов, которые не соответствуют вашему запросу или не имеют отношения к нему? Пожалуйста, свяжитесь с нами, чтобы сообщить об этой проблеме, чтобы мы могли вмешаться.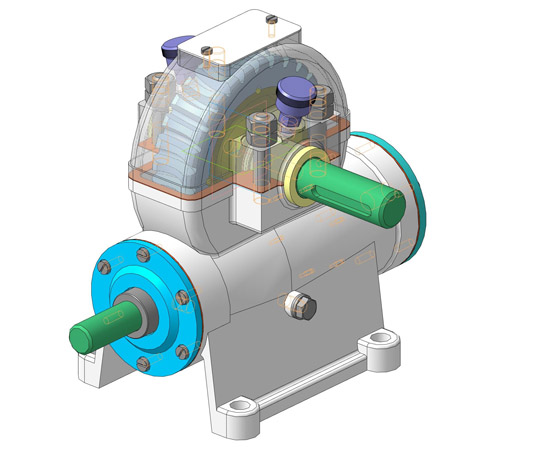
КОРОБКА ПЕРЕДАЧ CVT
3,49 €
Двойной редуктор Tamiya и Velleman на одинарную переходную пластину
Бесплатно
Жетон счетчика Gearbox Gasland
Бесплатно
Триггерный блок с микропереключателем для страйкбола
Бесплатно
Составной планетарный редуктор 51:1 (без крепления)
€5
Коробка передач Subaru Xmember Втулки в стиле Laile
2,84 €
чудо механики — мраморный бег
€3,20
-40%
€1,92
Адаптер двигателя для счетверённого механизма намотки часов
Бесплатно
Адаптер двигателя для счетверённого механизма намотки часов от FoodieHao
Бесплатно
Коробка передач для Carrera D124 с шарикоподшипником
Бесплатно
Кронштейн внутреннего блока ксенона
2,50 €
Селекторная пластина Airsoft G36
Бесплатно
Grind My Gears F-YOU Брелок для среднего пальца Gear Box
1,17 €
Механическая коробка передач Tremec TKO600
5,45 €
Коробка передач CVT Автоматическая коробка передач
3,64 €
Макет правильной машины.

 org/PropertyValue»>
org/PropertyValue»> org/PropertyValue»>
org/PropertyValue»> org/PropertyValue»>
org/PropertyValue»> org/PropertyValue»>
org/PropertyValue»> Если ваша посылка повреждена при получении, просто ОТКАЖИТЕ ее. Если транспортная компания уехала, и вы обнаружили, что ваша посылка повреждена, немедленно свяжитесь со СЛУЖБОЙ КЛИЕНТОВ по телефону 847-779-3079. Вы должны связаться со службой поддержки клиентов в течение 24 часов с момента получения посылки. Все поврежденные обмены должны быть возвращены в двойной упаковке (коробка производителя должна быть внутри другой коробки, предназначенной для транспортировки) с четко написанным номером RMA на внешней коробке, сопровождаемым примечанием, объясняющим, почему продукт возвращается, в оригинальной товарной коробке. Обмен производится только на аналогичную модель.
Если ваша посылка повреждена при получении, просто ОТКАЖИТЕ ее. Если транспортная компания уехала, и вы обнаружили, что ваша посылка повреждена, немедленно свяжитесь со СЛУЖБОЙ КЛИЕНТОВ по телефону 847-779-3079. Вы должны связаться со службой поддержки клиентов в течение 24 часов с момента получения посылки. Все поврежденные обмены должны быть возвращены в двойной упаковке (коробка производителя должна быть внутри другой коробки, предназначенной для транспортировки) с четко написанным номером RMA на внешней коробке, сопровождаемым примечанием, объясняющим, почему продукт возвращается, в оригинальной товарной коробке. Обмен производится только на аналогичную модель.



 Если вы заказали товар с бесплатной доставкой, с вас будет снята полная стоимость доставки. Кроме того, если ваша посылка не может быть доставлена из-за неверной информации, предоставленной вами, покупателем, или по любой другой причине, которая не является ошибкой GANDHI APPLIANCES, покупатель несет ответственность за оплату полной стоимости доставки. При отказе в доставке по специальному заказу или крупному заказу также взимается плата за пополнение запасов.
Если вы заказали товар с бесплатной доставкой, с вас будет снята полная стоимость доставки. Кроме того, если ваша посылка не может быть доставлена из-за неверной информации, предоставленной вами, покупателем, или по любой другой причине, которая не является ошибкой GANDHI APPLIANCES, покупатель несет ответственность за оплату полной стоимости доставки. При отказе в доставке по специальному заказу или крупному заказу также взимается плата за пополнение запасов. 
 Обмен производится только на аналогичную модель.
Обмен производится только на аналогичную модель.
 ). Все возвращаемые товары должны быть без каких-либо повреждений и находиться в оригинальной заводской упаковке со всеми оригинальными упаковочными материалами, гарантийными талонами, руководствами, аксессуарами, этикеткой UPC и любыми другими включенными материалами.
). Все возвращаемые товары должны быть без каких-либо повреждений и находиться в оригинальной заводской упаковке со всеми оригинальными упаковочными материалами, гарантийными талонами, руководствами, аксессуарами, этикеткой UPC и любыми другими включенными материалами. Возврат средств за товары, заказанные по специальному заказу, НЕвозможен. Возврат или обмен зарегистрированных тарифных планов не предусмотрен.
Возврат средств за товары, заказанные по специальному заказу, НЕвозможен. Возврат или обмен зарегистрированных тарифных планов не предусмотрен.
 6
6
 org/ImageObject»>
org/ImageObject»> 42 КБ
42 КБ org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> 12 КБ
12 КБ 27 КБ
27 КБ org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> 08KB
08KB 03KB
03KB org/ImageObject»>
org/ImageObject»> 95 КБ
95 КБ 09KB
09KB org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> 31 КБ
31 КБ 97KB )
97KB ) org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»> org/ImageObject»>
org/ImageObject»>
 Все генераторы работают с бесщёточной системой возбуждения и имеют электронную регулировку напряжения. Генераторы выдерживают короткое замыкание на три фазы в течение 5 секунд.
Все генераторы работают с бесщёточной системой возбуждения и имеют электронную регулировку напряжения. Генераторы выдерживают короткое замыкание на три фазы в течение 5 секунд. Момент вращения от дизельного двигателя передаётся на генератор через упругую резиновую муфту, обеспечивающую соосность и амортизацию колебаний кручения. К 2012 году предприятие освоило более 100 новых видов продукции. Одним из основных заказчиков компактных и надёжных дизельных электростанций является Министерство обороны.
Момент вращения от дизельного двигателя передаётся на генератор через упругую резиновую муфту, обеспечивающую соосность и амортизацию колебаний кручения. К 2012 году предприятие освоило более 100 новых видов продукции. Одним из основных заказчиков компактных и надёжных дизельных электростанций является Министерство обороны.


 Доступна информация об импорте растений, насекомых, микроорганизмов и не домашних животных на Гавайи.
Доступна информация об импорте растений, насекомых, микроорганизмов и не домашних животных на Гавайи. Все эти вещи проверяются в порту или аэропорту, чтобы убедиться, что они безопасны для всех нас.
Все эти вещи проверяются в порту или аэропорту, чтобы убедиться, что они безопасны для всех нас.
 Недавнее открытие в Нью-Йорке жука-жука Anoplophora.
Недавнее открытие в Нью-Йорке жука-жука Anoplophora.
 Есть
Есть Например,
Например, )
)
 В конце 1950-е годы в Томской области (Западная Сибирь), вредитель
В конце 1950-е годы в Томской области (Западная Сибирь), вредитель Зимуют взрослые жуки,
Зимуют взрослые жуки, Во время вспышки
Во время вспышки


 Чтобы более эффективно
Чтобы более эффективно 48. В: Труды, Департамент США.
48. В: Труды, Департамент США. Портленд, Орегон: Университет штата Орегон.
Портленд, Орегон: Университет штата Орегон.



 2 l
2 l
 5/5
5/5
 6/5
6/5 8/5
8/5 5 l
5 l
 7/5
7/5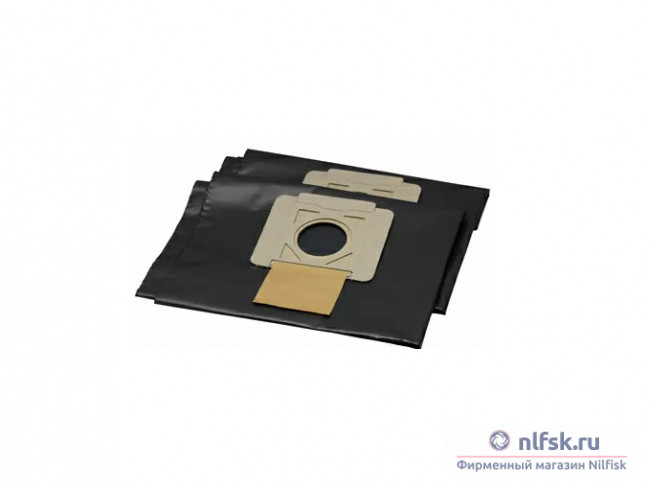 9 l
9 l




 9/5
9/5 24 l
24 l Они питаются от аккумуляторов, которых хватает на работу продолжительностью 15-30 минут. Их нельзя трактовать в качестве альтернативы классическому пылесосу, о
Они питаются от аккумуляторов, которых хватает на работу продолжительностью 15-30 минут. Их нельзя трактовать в качестве альтернативы классическому пылесосу, о Это технологическое новшество получило много положительных отзывов, но все еще есть сомнения в выгоде и преимуществах этих уст
Это технологическое новшество получило много положительных отзывов, но все еще есть сомнения в выгоде и преимуществах этих уст
 Например, именно у нас вы найдете пылесосы от Samsung, Karcher, пылесосы с контейнером и многие другие уникальные пылесосы от таких производителей, как Philips, Adler, Beko, Beper, Bosch, Electrolux, Samsung, Thomas, Sencor, Xiaomi и др. Благодаря такому большому выбору и разнообразию цен, вы быстро сумеете найти нужную модель пылесоса, которая поможет вам справиться со всеми задачами!
Например, именно у нас вы найдете пылесосы от Samsung, Karcher, пылесосы с контейнером и многие другие уникальные пылесосы от таких производителей, как Philips, Adler, Beko, Beper, Bosch, Electrolux, Samsung, Thomas, Sencor, Xiaomi и др. Благодаря такому большому выбору и разнообразию цен, вы быстро сумеете найти нужную модель пылесоса, которая поможет вам справиться со всеми задачами! С момента создания первого пылесоса эти устройства претерпели ряд существенных изменений и сегодня современные бытовые пылесосы умеют не только собирать пыль, но и выполняют влажную уборку любых напольных покрытий. Кроме того, они отличаются большим разнообразием моделей по габаритам, функциональным возможностям, показателям мощности, уровню шума и другим параметрам. Купить в Риге и Латвии качественный пылесос, отвечающий всем вашим требованиям, предлагаем на сайте нашего интернет — магазина. В ассортименте вы найдете широкий выбор различных пылесосов для сухой и влажной уборки, среди которых сможете выбрать наиболее подходящую для вас модель.
С момента создания первого пылесоса эти устройства претерпели ряд существенных изменений и сегодня современные бытовые пылесосы умеют не только собирать пыль, но и выполняют влажную уборку любых напольных покрытий. Кроме того, они отличаются большим разнообразием моделей по габаритам, функциональным возможностям, показателям мощности, уровню шума и другим параметрам. Купить в Риге и Латвии качественный пылесос, отвечающий всем вашим требованиям, предлагаем на сайте нашего интернет — магазина. В ассортименте вы найдете широкий выбор различных пылесосов для сухой и влажной уборки, среди которых сможете выбрать наиболее подходящую для вас модель. 5 l
5 l
 04.2023 до 23.04.2023.
04.2023 до 23.04.2023.

 8/5
8/5
 2 l
2 l

 3 l
3 l






 198-115.0
198-115.0
 При выборе т
При выборе т В каталоге нашего магазина представлены пылесосы в разных ценовых категориях, которые отличаются функциональными возможностями и техническими характеристиками.
В каталоге нашего магазина представлены пылесосы в разных ценовых категориях, которые отличаются функциональными возможностями и техническими характеристиками.


 После того, как вы дали свое разрешение, вас могут попросить ответить на запрос безопасности для отправки формы. Если вы не согласны, к сожалению, вы не можете использовать форму. Пожалуйста, свяжитесь с нами другим способом.
После того, как вы дали свое разрешение, вас могут попросить ответить на запрос безопасности для отправки формы. Если вы не согласны, к сожалению, вы не можете использовать форму. Пожалуйста, свяжитесь с нами другим способом. После того, как вы дали свое согласие, сторонние данные могут быть загружены. Для этого на вашем устройстве могут храниться сторонние файлы cookie. Вы можете изменить эти настройки в любое время (значок отпечатка пальца в левом нижнем углу). Дополнительные сведения см. в Уведомлении о конфиденциальности.
После того, как вы дали свое согласие, сторонние данные могут быть загружены. Для этого на вашем устройстве могут храниться сторонние файлы cookie. Вы можете изменить эти настройки в любое время (значок отпечатка пальца в левом нижнем углу). Дополнительные сведения см. в Уведомлении о конфиденциальности. 529
529 831
831 347
347 НДС
НДС  номер 107407544 EAN/UPC 5711145171474 Описание продукта: Nilfisk-Alto ATTIX 30-21 PC — Пылесос — Пылесос для пола Тип продукта Пылесос Тип пылесоса: Пылесос для пола Метод уборки Сухой, влажный сбор пыли С мешком / без мешка Уровень шума (макс. ) 59дБ Напряжение 230 В / 50/60 Макс. Гц. Энергопотребление 1500 Вт Размеры (ширина x глубина x высота) 38 см x 45 см x 59,5 см Вес 10 кг Детали: Общий тип продукта Тип пылесоса Тип пылесоса Тип пылесоса Универсальное использование Метод уборки Сухой, влажный сбор пыли С мешком / без рукавного фильтра типа ПЭТ Объем пылесборника 30 литров Расход воздуха 61,7 л/с Вакуум 25 кПа Особенности Встроенный набор аксессуаров, очищаемый фильтр, плавный пуск, встроенные колеса, система очистки фильтра Push&Clean, антистатическая система, система аксессуаров multifitblue-С фильтром мешочный паркет/ламинат, твердый пол, ковер № производителя: 107407544
номер 107407544 EAN/UPC 5711145171474 Описание продукта: Nilfisk-Alto ATTIX 30-21 PC — Пылесос — Пылесос для пола Тип продукта Пылесос Тип пылесоса: Пылесос для пола Метод уборки Сухой, влажный сбор пыли С мешком / без мешка Уровень шума (макс. ) 59дБ Напряжение 230 В / 50/60 Макс. Гц. Энергопотребление 1500 Вт Размеры (ширина x глубина x высота) 38 см x 45 см x 59,5 см Вес 10 кг Детали: Общий тип продукта Тип пылесоса Тип пылесоса Тип пылесоса Универсальное использование Метод уборки Сухой, влажный сбор пыли С мешком / без рукавного фильтра типа ПЭТ Объем пылесборника 30 литров Расход воздуха 61,7 л/с Вакуум 25 кПа Особенности Встроенный набор аксессуаров, очищаемый фильтр, плавный пуск, встроенные колеса, система очистки фильтра Push&Clean, антистатическая система, система аксессуаров multifitblue-С фильтром мешочный паркет/ламинат, твердый пол, ковер № производителя: 107407544 01.2018
01.2018 0067
0067
 04.2014 г. № 14411.1929999.11.028
04.2014 г. № 14411.1929999.11.028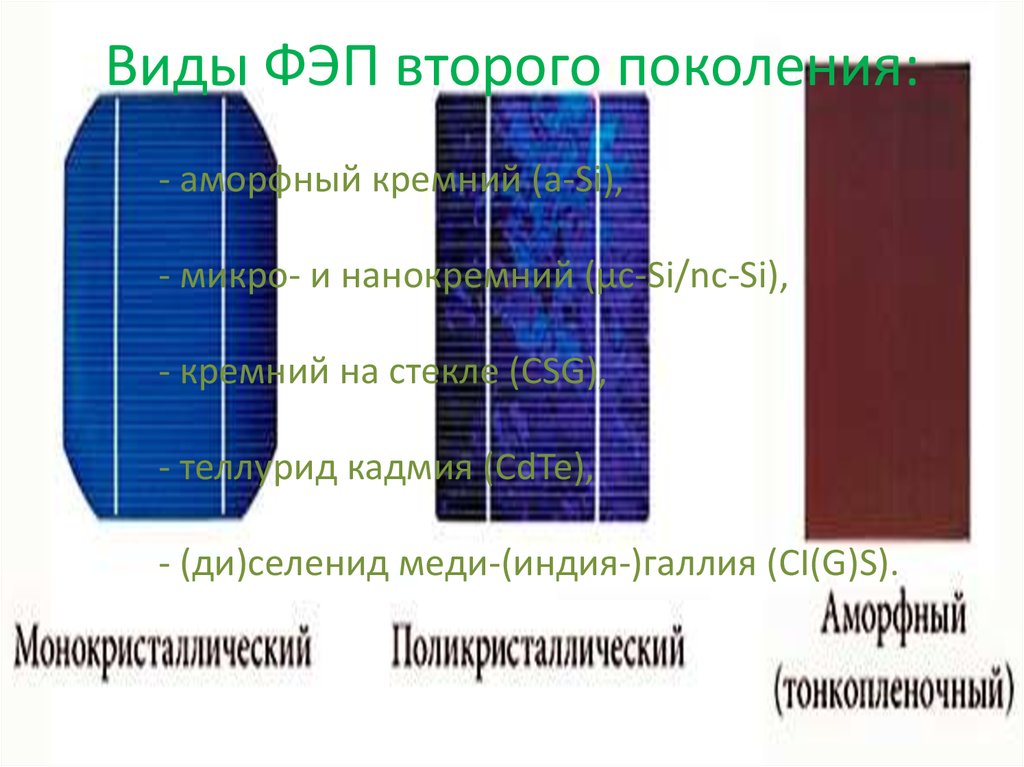 Высокая теплопроводность покрытия повышает выработку энергии вследствие лучшего охлаждения модуля
Высокая теплопроводность покрытия повышает выработку энергии вследствие лучшего охлаждения модуля 0
0 8
8 34 мм цвет белый, Huitian New Material Co
34 мм цвет белый, Huitian New Material Co


 США, пройдя тест Blue Health Assessment
США, пройдя тест Blue Health Assessment США, пройдя тест Blue Health Assessment
США, пройдя тест Blue Health Assessment

 — Сегодня в рамках плана государственных льгот Blue Cross® и Blue Shield® (BCBS), также известного как Федеральная программа для служащих® (FEP®), объявлены льготы 2022 года, доступные правомочным участникам. в Программе медицинского страхования федеральных служащих (FEHB) и Программе страхования зубов и зрения федеральных служащих (FEDVIP). Среди изменений — расширенные программы поощрения лечения гипертонии и ухода за беременными, стоматологические и офтальмологические льготы для детей, а также добавление дополнительной страховки для международных поездок со скидкой через GeoBlue®.
— Сегодня в рамках плана государственных льгот Blue Cross® и Blue Shield® (BCBS), также известного как Федеральная программа для служащих® (FEP®), объявлены льготы 2022 года, доступные правомочным участникам. в Программе медицинского страхования федеральных служащих (FEHB) и Программе страхования зубов и зрения федеральных служащих (FEDVIP). Среди изменений — расширенные программы поощрения лечения гипертонии и ухода за беременными, стоматологические и офтальмологические льготы для детей, а также добавление дополнительной страховки для международных поездок со скидкой через GeoBlue®.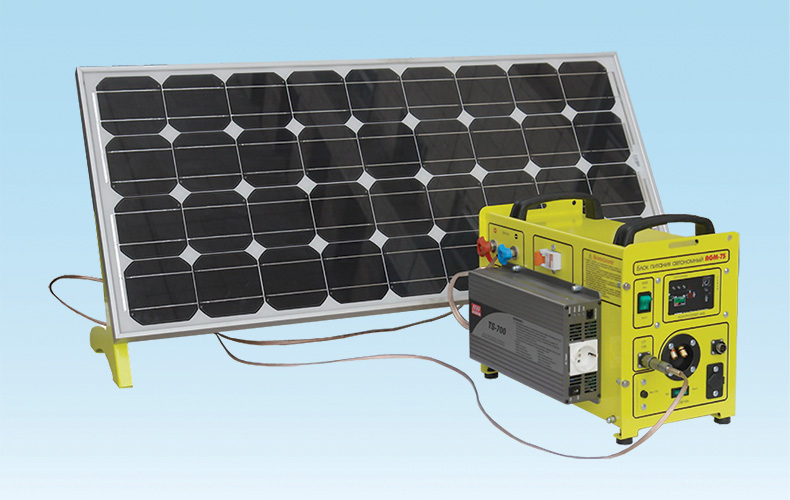
 BCBS FEP Dental также выпустила набор новых функций для своего мобильного приложения, которые позволят участникам просматривать информацию о льготах, покрытии и требованиях, а также получать доступ к своей идентификационной карте в одном месте.
BCBS FEP Dental также выпустила набор новых функций для своего мобильного приложения, которые позволят участникам просматривать информацию о льготах, покрытии и требованиях, а также получать доступ к своей идентификационной карте в одном месте. США
США  .22
.22  Посетите www.fepblue.org/whatsnew или позвоните по телефону 1-800-411-BLUE (2583).
Посетите www.fepblue.org/whatsnew или позвоните по телефону 1-800-411-BLUE (2583).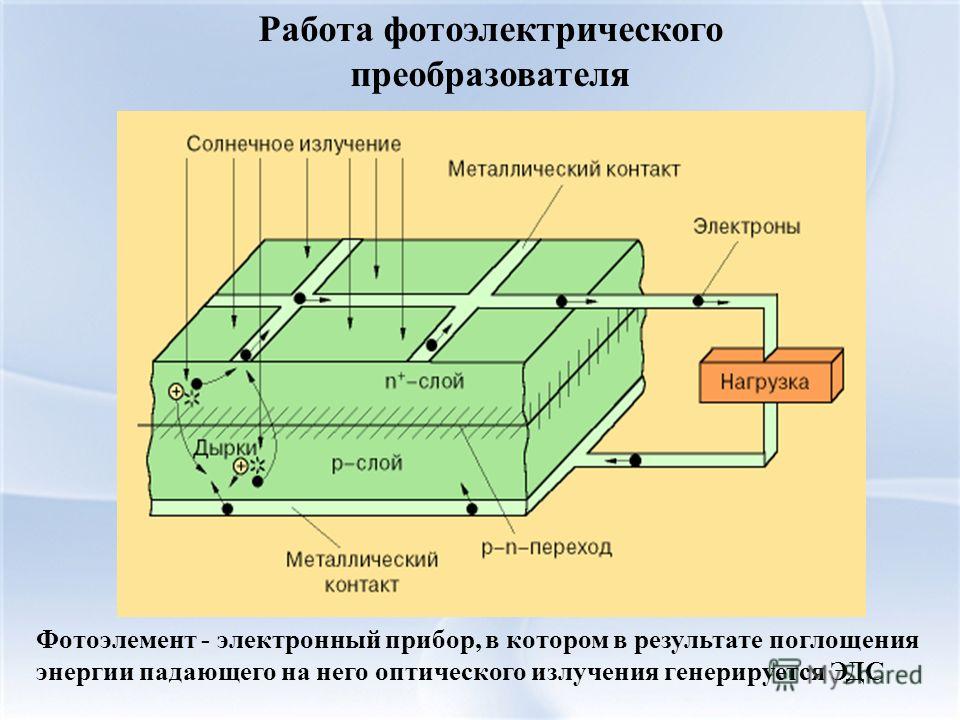

 При этом они диссоциируют на ионы:
При этом они диссоциируют на ионы:
 0084 секунд (в токе водорода и при разряжении 1-2 мм рт.ст.)[1], но его можно уменьшить или продлить при помощи катализаторов или ингибиторов.
0084 секунд (в токе водорода и при разряжении 1-2 мм рт.ст.)[1], но его можно уменьшить или продлить при помощи катализаторов или ингибиторов.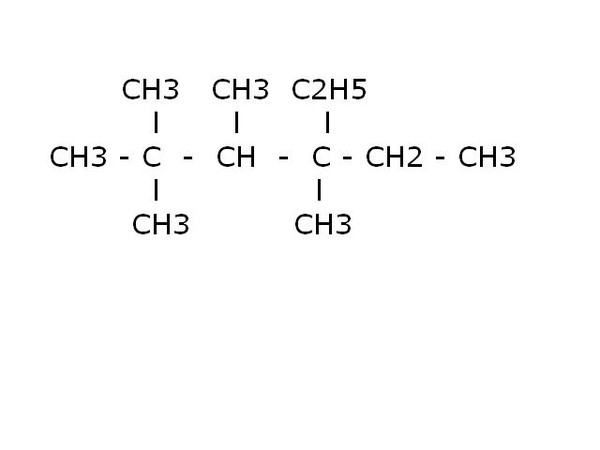 Также терминальный заместитель в углеводородах Введение метильной группы может осуществляется:
Также терминальный заместитель в углеводородах Введение метильной группы может осуществляется: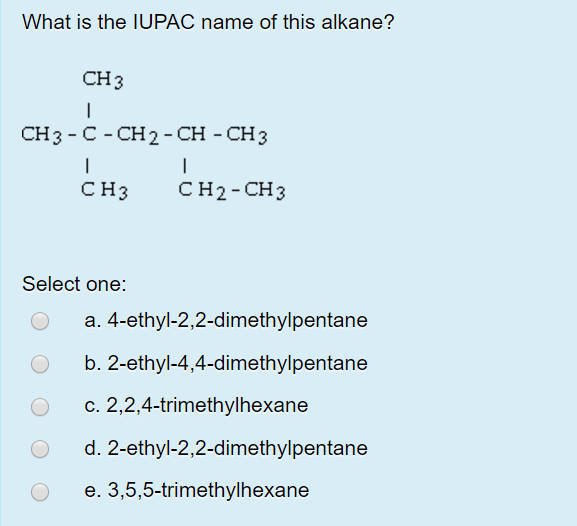
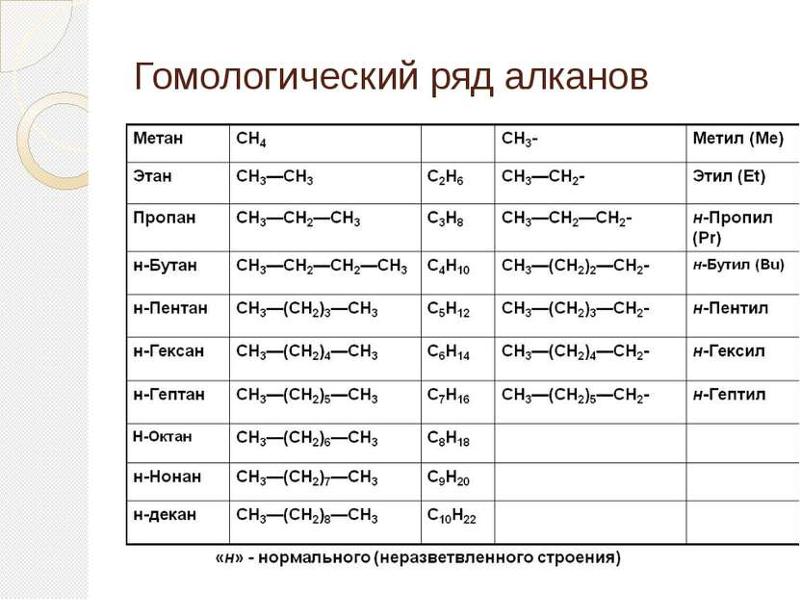
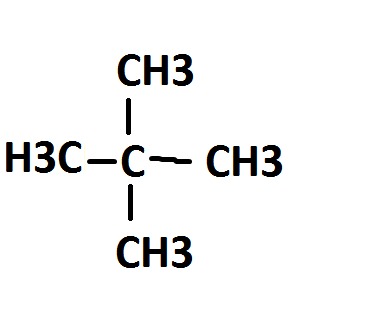 Это простейший член ряда углеводородов. Каждый последующий член ряда имеет на один атом углерода больше, чем предыдущий член. Этот ряд соединений называется алканов ( С n H 2n+2 ) . Более легкие газы и используются в качестве топлива. Средние (от 7 углеродов до 12 углеродов) — это жидкости, используемые в бензине (бензине). Высшие представляют собой воскообразные твердые вещества. Свечной воск представляет собой смесь алканов. Алканы являются насыщенными, что означает, что они содержат максимальное количество атомов водорода на углерод и не содержат двойных или тройных связей.
Это простейший член ряда углеводородов. Каждый последующий член ряда имеет на один атом углерода больше, чем предыдущий член. Этот ряд соединений называется алканов ( С n H 2n+2 ) . Более легкие газы и используются в качестве топлива. Средние (от 7 углеродов до 12 углеродов) — это жидкости, используемые в бензине (бензине). Высшие представляют собой воскообразные твердые вещества. Свечной воск представляет собой смесь алканов. Алканы являются насыщенными, что означает, что они содержат максимальное количество атомов водорода на углерод и не содержат двойных или тройных связей.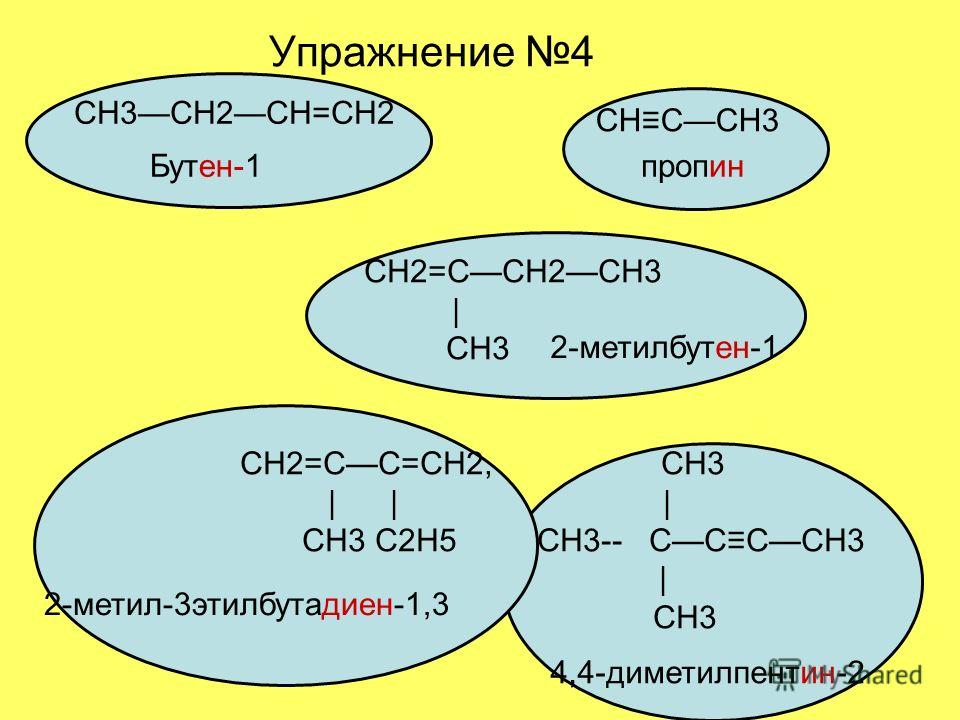 Найдите и назовите самую длинную непрерывную углеродную цепь.
Найдите и назовите самую длинную непрерывную углеродную цепь.  Это означает, что для каждой молекулярной формулы можно нарисовать две или более различных структурных формул.
Это означает, что для каждой молекулярной формулы можно нарисовать две или более различных структурных формул.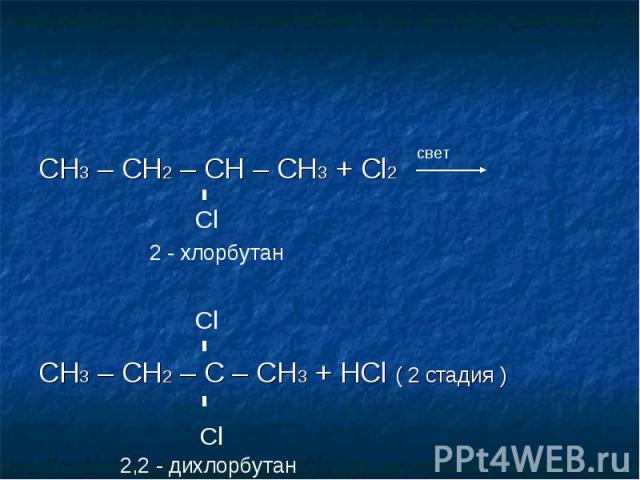
 Следуя этому правилу, на этой молекуле вы нумеруете справа налево, так как 2-углеродный заместитель находится ближе к этому концу.
Следуя этому правилу, на этой молекуле вы нумеруете справа налево, так как 2-углеродный заместитель находится ближе к этому концу. Таким образом, правильная номенклатура этого алкана — 4-этилоктан. Обратите внимание, что тире используется для отделения числа от заместителя.
Таким образом, правильная номенклатура этого алкана — 4-этилоктан. Обратите внимание, что тире используется для отделения числа от заместителя.
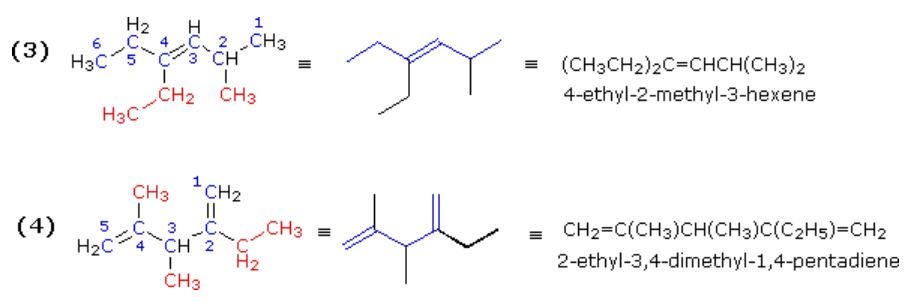 Самая длинная цепь, выбранная для корневого названия, должна включать 90 551 оба атома углерода двойной связи 90 552 .
Самая длинная цепь, выбранная для корневого названия, должна включать 90 551 оба атома углерода двойной связи 90 552 . 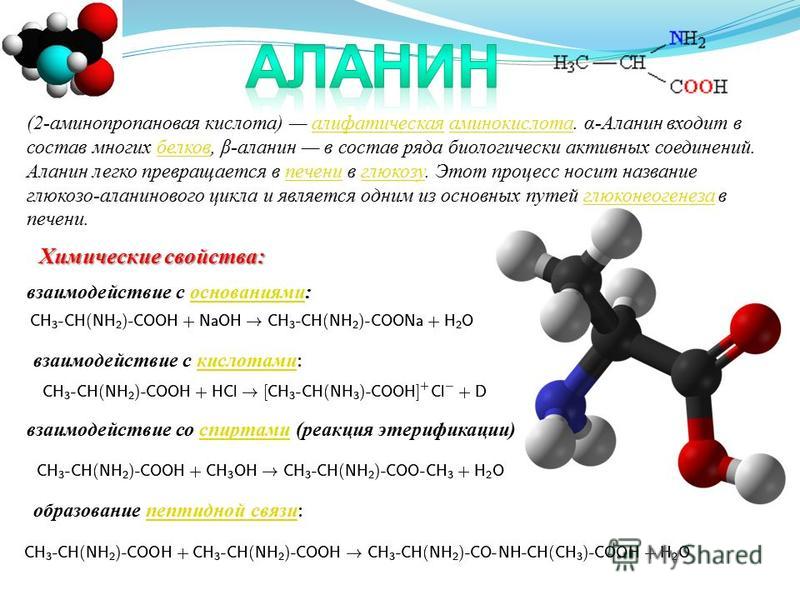 Они имеют следующую формулу: C n H 2n-2 .
Они имеют следующую формулу: C n H 2n-2 .  Двойные связи предшествуют тройным связям в названии IUPAC, но цепочка нумеруется с конца, ближайшего к кратной связи, независимо от ее природы.
Двойные связи предшествуют тройным связям в названии IUPAC, но цепочка нумеруется с конца, ближайшего к кратной связи, независимо от ее природы. 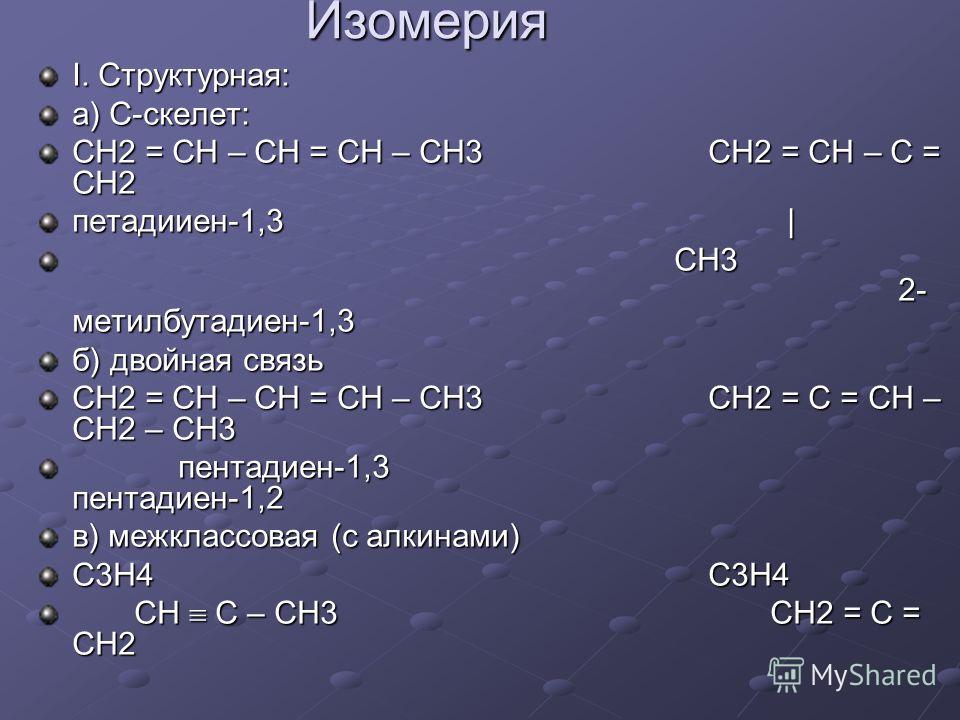 Имеется 3 пентана, 5 гексанов, 9 гептанов и 18 октанов. Было бы трудно присвоить уникальные индивидуальные имена, которые мы могли бы запомнить. Систематический способ именования углеводородов и других органических соединений был разработан Международным союзом теоретической и прикладной химии (IUPAC). Эти правила, используемые во всем мире, известны как Система номенклатуры IUPAC. (Некоторые названия, которые мы использовали ранее, такие как изобутан, изопентан и неопентан, не соответствуют этим правилам и называются общих имен .) Название основы (Таблица \(\PageIndex{1}\)) указывает количество атомов углерода в самой длинной непрерывной цепи (LCC). Атомы или группы, присоединенные к этой углеродной цепи, называемые заместителями , затем называются, а их положения обозначаются цифрами. Сейчас мы будем рассматривать только те заместители, которые называются алкильными группами.
Имеется 3 пентана, 5 гексанов, 9 гептанов и 18 октанов. Было бы трудно присвоить уникальные индивидуальные имена, которые мы могли бы запомнить. Систематический способ именования углеводородов и других органических соединений был разработан Международным союзом теоретической и прикладной химии (IUPAC). Эти правила, используемые во всем мире, известны как Система номенклатуры IUPAC. (Некоторые названия, которые мы использовали ранее, такие как изобутан, изопентан и неопентан, не соответствуют этим правилам и называются общих имен .) Название основы (Таблица \(\PageIndex{1}\)) указывает количество атомов углерода в самой длинной непрерывной цепи (LCC). Атомы или группы, присоединенные к этой углеродной цепи, называемые заместителями , затем называются, а их положения обозначаются цифрами. Сейчас мы будем рассматривать только те заместители, которые называются алкильными группами.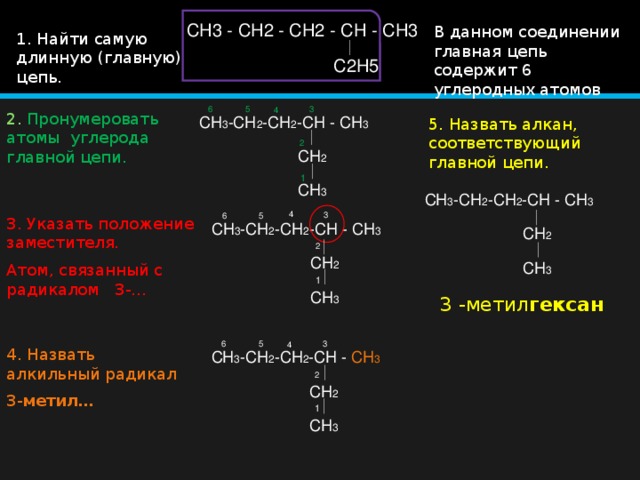 Группа названа путем замены суффикса -ane исходного углеводорода на .-ил . Например, группа -CH 3 , полученная из метана (CH 4 ), получается в результате вычитания одного атома водорода и называется метильной группой . Алкильные группы, которые мы будем использовать чаще всего, перечислены в таблице \(\PageIndex{2}\). Алкильные группы не являются независимыми молекулами; это части молекул, которые мы рассматриваем как единое целое, чтобы систематически называть соединения.
Группа названа путем замены суффикса -ane исходного углеводорода на .-ил . Например, группа -CH 3 , полученная из метана (CH 4 ), получается в результате вычитания одного атома водорода и называется метильной группой . Алкильные группы, которые мы будем использовать чаще всего, перечислены в таблице \(\PageIndex{2}\). Алкильные группы не являются независимыми молекулами; это части молекул, которые мы рассматриваем как единое целое, чтобы систематически называть соединения. We will introduce the other three where appropriate.»> метан
We will introduce the other three where appropriate.»> метан We will introduce the other three where appropriate.»> CH 3 CH 2 –
We will introduce the other three where appropriate.»> CH 3 CH 2 – We will introduce the other three where appropriate.»> изопропил
We will introduce the other three where appropriate.»> изопропил Мы представим остальные три, где это уместно.
Мы представим остальные три, где это уместно. Если одна и та же алкильная группа встречается более одного раза, указываются номера всех атомов углерода, к которым она присоединена. Если одна и та же группа появляется более одного раза у одного и того же атома углерода, номер этого атома углерода повторяется столько раз, сколько появляется группа. Причем количество одинаковых групп обозначается греческими префиксами di -, три -, тетра — и так далее. Эти префиксы , а не учитываются при определении алфавитного порядка заместителей. Например, этил указан перед диметилом; di- просто игнорируется. Последняя названная алкильная группа ставится перед названием исходного алкана, образуя одно слово.
Если одна и та же алкильная группа встречается более одного раза, указываются номера всех атомов углерода, к которым она присоединена. Если одна и та же группа появляется более одного раза у одного и того же атома углерода, номер этого атома углерода повторяется столько раз, сколько появляется группа. Причем количество одинаковых групп обозначается греческими префиксами di -, три -, тетра — и так далее. Эти префиксы , а не учитываются при определении алфавитного порядка заместителей. Например, этил указан перед диметилом; di- просто игнорируется. Последняя названная алкильная группа ставится перед названием исходного алкана, образуя одно слово. Это проще, чем кажется.
Это проще, чем кажется.
 Оно становится хрупкой.
Оно становится хрупкой.
 Ожидаемый предел прочности равен 16,533 фунта на квадратный дюйм (114 мПа), устойчивость на разрыв – 120%. Taulman3D 645 Nylon обладает всеми теми же качествами, что и Taulman3D 618 Nylon, но с улучшенными характеристиками. Рекомендованная температура печати от ~230°C до 265°C.
Ожидаемый предел прочности равен 16,533 фунта на квадратный дюйм (114 мПа), устойчивость на разрыв – 120%. Taulman3D 645 Nylon обладает всеми теми же качествами, что и Taulman3D 618 Nylon, но с улучшенными характеристиками. Рекомендованная температура печати от ~230°C до 265°C. Если поверхность, напечатанная из Nylon, достаточно тонкая, то она может продемонстрировать хорошую гибкость при сохранении прочности.
Если поверхность, напечатанная из Nylon, достаточно тонкая, то она может продемонстрировать хорошую гибкость при сохранении прочности.

 Первые применяются для деталей, требующих стойкости к ультрафиолету и ударам, вторые выбирают для получения повышенной прочности и жесткости элементов. Существуют также порошковые варианты армированного полиамида, известные как составы из нейлоновых композиционных материалов, которые, помимо Nylon, обычно содержат частицы стекла, алюминия или углеродного волокна.
Первые применяются для деталей, требующих стойкости к ультрафиолету и ударам, вторые выбирают для получения повышенной прочности и жесткости элементов. Существуют также порошковые варианты армированного полиамида, известные как составы из нейлоновых композиционных материалов, которые, помимо Nylon, обычно содержат частицы стекла, алюминия или углеродного волокна. Дюйм]
Дюйм] | 50-60 Гц
| 50-60 Гц С точки зрения рациональности, это преимущество перед FDM, поскольку любой ресурс, используемый в качестве поддержек, обычно не преобразуется обратно в нить для повторного применения. Нейлон отлично подходит для изготовления функциональных деталей, а технология селективного лазерного спекания помогает создавать сложные конфигурации.
С точки зрения рациональности, это преимущество перед FDM, поскольку любой ресурс, используемый в качестве поддержек, обычно не преобразуется обратно в нить для повторного применения. Нейлон отлично подходит для изготовления функциональных деталей, а технология селективного лазерного спекания помогает создавать сложные конфигурации. Однако в то время как при SLS лазер начал бы спекание, MJF вводит дополнительный этап в процесс печати в виде добавления химических агентов.
Однако в то время как при SLS лазер начал бы спекание, MJF вводит дополнительный этап в процесс печати в виде добавления химических агентов.

 Он встречается во многих вариантах, но наиболее распространенными из них являются нейлон 6, нейлон 6-6 и нейлон 12. Это термопластичный материал, т. Е. Он становится мягким при нагревании или жидким при нагревании выше точки плавления и твердеет при охлаждении. Этот процесс нагревания и охлаждения можно проводить несколько раз без существенного влияния на присущие ему химические или механические свойства.
Он встречается во многих вариантах, но наиболее распространенными из них являются нейлон 6, нейлон 6-6 и нейлон 12. Это термопластичный материал, т. Е. Он становится мягким при нагревании или жидким при нагревании выше точки плавления и твердеет при охлаждении. Этот процесс нагревания и охлаждения можно проводить несколько раз без существенного влияния на присущие ему химические или механические свойства.


 Этот разрыв оставляет видимые зазоры в 3D-печатных деталях, что приводит к ухудшению качества печати.
Этот разрыв оставляет видимые зазоры в 3D-печатных деталях, что приводит к ухудшению качества печати. Одним из примеров этих передовых профессиональных функций является закрытая камера с подогревом, которая сводит к минимуму деформацию и непостоянное охлаждение во время печати, а также может использоваться перед печатью для сушки нити на катушке. Еще одной такой особенностью являются герметичные отсеки для материалов, которые предотвращают контакт материала с окружающей средой. Эти два дополнения почти полностью решают проблемы, связанные с нейлоновой 3D-печатью, и их, возможно, стоит рассмотреть при покупке, если нейлон является предпочтительным материалом для 3D-печати.
Одним из примеров этих передовых профессиональных функций является закрытая камера с подогревом, которая сводит к минимуму деформацию и непостоянное охлаждение во время печати, а также может использоваться перед печатью для сушки нити на катушке. Еще одной такой особенностью являются герметичные отсеки для материалов, которые предотвращают контакт материала с окружающей средой. Эти два дополнения почти полностью решают проблемы, связанные с нейлоновой 3D-печатью, и их, возможно, стоит рассмотреть при покупке, если нейлон является предпочтительным материалом для 3D-печати. дюйм
дюйм
 com/method.
com/method.
 Если вы не хотите постоянно монтировать и снимать катушку с нитью, в продаже также имеются контейнеры для хранения, в которых нить будет оставаться сухой, но при этом она будет вытягиваться из отверстия в контейнере.
Если вы не хотите постоянно монтировать и снимать катушку с нитью, в продаже также имеются контейнеры для хранения, в которых нить будет оставаться сухой, но при этом она будет вытягиваться из отверстия в контейнере.

 Из-за прицела управлять отдачей немного сложнее. Точность, особенно из-за недавних изменений точности, не потрясающая, она хорошая, вы ПРОМАЕТЕ около 25% своих выстрелов. Урон и скорострельность потрясающие, пистолет иногда может даже побить ППШ в БКК, если вы попадете в цель. На средних и дальних дистанциях он одолеет всех, кроме снайперов и хороших стрелков, даже в этом случае у вас есть хорошие шансы против них из-за вашего магазина на 30 патронов.
Из-за прицела управлять отдачей немного сложнее. Точность, особенно из-за недавних изменений точности, не потрясающая, она хорошая, вы ПРОМАЕТЕ около 25% своих выстрелов. Урон и скорострельность потрясающие, пистолет иногда может даже побить ППШ в БКК, если вы попадете в цель. На средних и дальних дистанциях он одолеет всех, кроме снайперов и хороших стрелков, даже в этом случае у вас есть хорошие шансы против них из-за вашего магазина на 30 патронов.
 Я думаю, что это должно быть в состоянии удалить. Пистолет хорош и забавен, но ничего не ломает игру. Это не ОП. Российские пистолеты-пулеметы по-прежнему лучше CQC, но у STG больше шансов. Новые русские дополнения скучны.
Я думаю, что это должно быть в состоянии удалить. Пистолет хорош и забавен, но ничего не ломает игру. Это не ОП. Российские пистолеты-пулеметы по-прежнему лучше CQC, но у STG больше шансов. Новые русские дополнения скучны. Так кто и когда захватил первый немецкий Maschinenkarabiner 42?
Так кто и когда захватил первый немецкий Maschinenkarabiner 42? Этот MKb42(H) прошел предварительные исследования и испытания 19 июля.43. Поскольку трех оригинальных патронов было недостаточно для каких-либо испытаний, полигону было приказано изготовить 500 патронов совместимых боеприпасов «путем повторной обжатия немецких гильз и обрезки пуль» на месте.
Этот MKb42(H) прошел предварительные исследования и испытания 19 июля.43. Поскольку трех оригинальных патронов было недостаточно для каких-либо испытаний, полигону было приказано изготовить 500 патронов совместимых боеприпасов «путем повторной обжатия немецких гильз и обрезки пуль» на месте. Линия фронта в этом районе была относительно стабильной, поэтому отправить сюда партию нового оружия для боевых испытаний наверняка показалось немецкому командованию отличной идеей. Однако немцы не учли высокую активность разведка , подразделения советской полевой разведки в этом районе. В отличие от армейских рейнджеров США, эти высококвалифицированные операторы в маскарадных костюмах, часто с опытом охоты в Сибири, регулярно совершали рейды глубоко в тылу врага, чтобы разведать свежие разведданные о вражеских силах и вернуть живых заключенных для допроса. Их второстепенной целью было помешать своим немецким коллегам сделать то же самое.
Линия фронта в этом районе была относительно стабильной, поэтому отправить сюда партию нового оружия для боевых испытаний наверняка показалось немецкому командованию отличной идеей. Однако немцы не учли высокую активность разведка , подразделения советской полевой разведки в этом районе. В отличие от армейских рейнджеров США, эти высококвалифицированные операторы в маскарадных костюмах, часто с опытом охоты в Сибири, регулярно совершали рейды глубоко в тылу врага, чтобы разведать свежие разведданные о вражеских силах и вернуть живых заключенных для допроса. Их второстепенной целью было помешать своим немецким коллегам сделать то же самое.

 Прочитать больше отзывов или оставить свой вы можете в комментариях к этой странице. Спасибо за ваш отзыв или оценку!
Прочитать больше отзывов или оставить свой вы можете в комментариях к этой странице. Спасибо за ваш отзыв или оценку! с.
с.
