Производителем круглопильного торцовочного станка ЦПА-40 является Уссурийский машиностроительный завод.
Предприятие ЗАО Уссурийский машиностроительный завод прекратил свое существование в 2014 г.
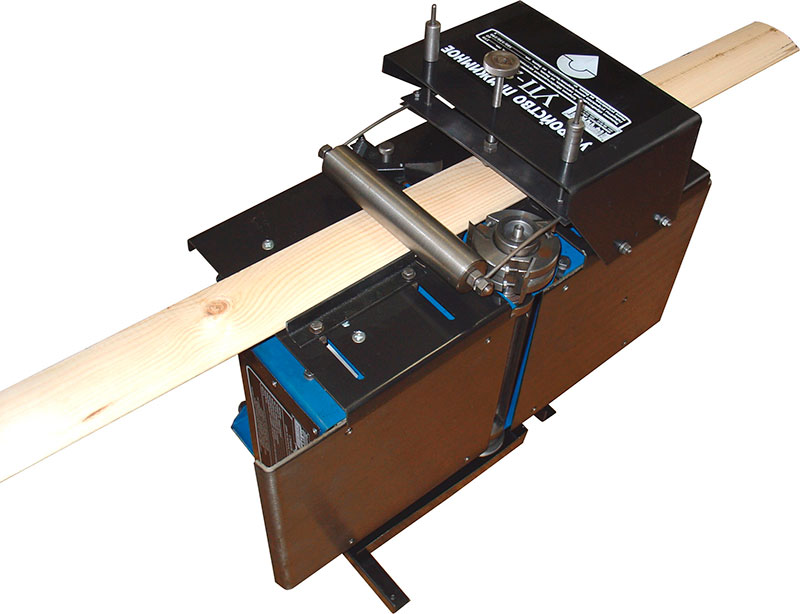
Линейная направляющая пильного узла ограничивает ширину заготовки только собственной длиной. Так, в модели ЦПА-40 ход пильного суппорта достигает 400 мм. Чтобы устройство двигалось в одном направлении — направлении подачи пилы, суппорт имеет несколько типов роликов. Да и форма самой направляющей достаточно сложная. Она подвержена интенсивному износу, воздействию контактных и изгибных нагрузок, так как имеет консольную форму.
ЦПА-40 Станок торцовочный круглопильный с прямолинейным движением суппорта. Назначение, область применения
Станок круглопильный торцовочный с прямолинейным движением суппорта модели ЦПА-40 предназначен для поперечной распиловки досок, брусьев и щитов, а также может быть использован для вырезки пазов.
Станок является оборудованием общего назначения для деревообрабатывающих производств.
Суппорт опирается на подшипники качения и, в начале работы, может вручную подниматься и опускаться посредством маховичка и зубчатой передачи. После подъема или опускания суппорт фиксируется на определенной высоте.
В течении работы посредством гидропривода суппорт совершает возвратно-поступательные движения. В головной части суппорта крепится электродвигатель с режущим диском на валу.
Устройство и описание составных частей станка
Посадочные размеры вала торцовочного станка ЦПА-40
ЦПА-40 Расположение составных частей торцовочного станка
Перечень составных частей торцовочного станка ЦПА-40:
Педаль управления подачей суппорта Маховичок подъема и опускания суппорта
Зажим суппорта по высоте
Валики транспортные
Защита пильного диска
Дисковая пила
Вал пильного диска
Упорная планка
Суппорт
Гидроцилиндр подачи суппорта
Опорный корпус суппорта
Станина станка
Электродигатель — привод насоса гидростанции
ЦПА-40 Расположение органов управления торцовочного станка
Схема кинематическая торцовочного станка ЦПА-40
Устройство и описание составных частей станка
Станок торцовочный модели ЦПА-40 прост по устройству и надежный в эксплуатации при условии выполнения всех требований, изложенных в настоящем руководстве.
На станине — полой чугунной отливке, являющейся одновременно масляным резервуаром, смонтирован опорный корпус суппорта. Корпус совместно с суппортом, при надобности, может подниматься и поворачиваться на определенную величину. Суппорт опирается на подшипники качения и посредством гидропривода совершает возвратно-поступательные движения. В головной части суппорта крепится электродвигатель с режущим инструментом на валу.
Управляется станок дистанционно, посредством педали
Электросхема станка ЦПА-40 предусматривает дистанционное управление электродвигателями станка посредством кнопочной станции.
Подключение станка к электросети производится включением автомата В.
Включение электродвигателей Ml, M2 производится кнопкой КнП с помощью магнитных пускателей Р1 и Р2.
Остановка электродвигателей осуществляется кнопкой КнС, разрывающей цепь управления. Пускатели Р1 и Р2, отключаются, при этом нормально закрытый блок-контакт Р1 замыкается, срабатывает пускатель РЗ и на обмотки электродвигателя Ml подается постоянный ток — происходит динамическое торможение.
Через определенный промежуток времени электросхема обесточивается посредством реле времени — Р4.
Гидропривод станка состоит из следующих узлов и механизмов:
Лопастной насос Г12-33
Золотник
Предохранительный клапан Г52-23
ГидроЦилиндр подачи суппорта
Механизм управления
В процессе работы станка гидропривод обеспечивает три позиции (положения) суппорта:
«рабочий ход»
«обратный ход»
«стоп»
Для получения рабочего хода, ногой нажимают на педаль управления. При этом золотник сообщает с насосом обе полости цилиндра одновременно. Вследствие разности создаваемых усилий, поршень движется в сторону штоковой полости — суппорт совершает рабочий ход.
В конце рабочего хода специальный упор (ограничитель) перемещает золотник в положение, при котором последний сообщает бесштоковую полость цилиндра со сливом — суппорт совершает обратный ход.
Подходя к исходному положению, суппорт посредством ограничителя холостого хода ставит золотник в среднее — нейтральное положение — слив из бесштоковой полости прекращается, суппорт останавливается. Масло через сверление в золотнике свободно идет на слив.
Для повторения цикла необходимо снова нажать на педаль управления.
Технические характеристики торцовочного станка ЦПА-40
Надежные торцовочные пилы для стройплощадки и мастерской
Торцовочные пилы компании Metabo сконструированы с учетом многолетнего опыта. Программа включает свыше 10 пил для самых различных случаев применения. Номинальная потребляемая мощность в зависимости от модели варьируется от 1350 Вт до 2200 Вт. Можно выбрать пильные полотна диаметров от 216 мм до 315 мм, от этого зависит максимальная ширина и высота детали. Большая торцовочная и усорезная пила KGS 315 Plus обеспечивает ширину реза 320 мм при глубине реза 120 мм, если пильное полотно установлено под углом 90°. Конечно, с использованием функции протяжки, которая интегрирована практически во все модели торцовочных пил. Для мобильного применения мы рекомендуем компактные легковесы с рукояткой для переноски, которые вряд ли весят больше 10 кг. Единственной в своем роде является пила KGSV 72 Xact SYM, представляющая собой комбинацию панельной и реечной пилы с симметрично переставляемой системой упора. Реальный прогресс в операциях точного распиливания с экономией времени для специалистов по укладке напольных покрытий.
Функции для максимального комфорта при пилении
Во всех торцовочных пилах поворотный диск можно поворачивать с обеих сторон. Стандартной функцией является также наклон пильной рамы, в некоторых моделях даже вправо и влево. Косые резы, криволинейные пропилы и комбинированные распилы/резы возможны без каких-либо проблем. При наличии торцовочной пилы с регулированием числа оборотов можно при соответствующей скорости вращения без проблем распиливать алюминий и пластик. Встроенный лазер для ведения реза и выдвижные расширения стола, являются для Metabo стандартным оборудованием так же, как и возможность отсасывания стружки. Другие свойства указаны в описании отдельных изделий.
Большая программа пильных полотен для торцовочных пил
От чернового реза строительной древесины до точных чистых резов в сложных деталях — имеются пильные полотна всех необходимых диаметров и систем зубьев. Специальные полотна для пластика и алюминия завершают обширный ассортимент принадлежностей для торцовочных пил. Для распиливания стоя можно использовать подставки. Легкая и прочная подставка, возможно с колесиками, для мобильного применения — это ценный помощник на стройплощадке. Для распиливания длинных деталей в подставке для торцовочных пил KSU 401 можно вытянуть опорную поверхность на ширину до 4 метров.
Стройплощадка без кабелей с аккумуляторными торцовочными пилами
Благодаря новейшей аккумуляторной технологии аккумуляторные торцовочные пилы являются эффективными машинами, которые в основном используются на стройплощадках или при работах по монтажу и прокладке. Например, с помощью мощного аккумуляторного блока LiHD (8 А·ч) можно за одну-единственную зарядку аккумулятора выполнить до 340 резов в мягкой древесине размером 60 x 60 мм. В нашей аккумуляторной системе для всех устройств на 18 В можно использовать любой аккумуляторный блок Metabo на 18 В. Также можно использовать аккумуляторные блоки других ведущих брендов от партнерского объединения CAS. Узнайте сейчас на сайте www.cordless-alliance-system.com
Определение и значение обрезки – Merriam-Webster
обрезка · мин
три-минь
1
а
: дополнительное украшение
индейка и все гарниры
б
: декоративный аксессуар или дополнительный предмет
окантовка для шляпы
с
: остатки чего-то подстриженного : обрезка
обрезки деревьев/травы/изгороди
2
: поражение 3
0003
: действие того, кто подстригает
Синонимы
избиение
поражение
избиение
лизать
потеря
комок
свержение
штукатурка
маршрут
шеллак
избиение
порка
Просмотреть все синонимы и антонимы в тезаурусе
Примеры предложений
наша футбольная команда перенесла довольно серьезную обрезку
— Кевин Пол Дюпон, BostonGlobe.com , 11 декабря 2022 г.
В период с 2018 по 2020 год сокращение из позволило CIHR финансировать дополнительно 87 грантов на каждый конкурс.
— Байбрайан Оуэнс, science.org , 1 декабря 2022 г.
Перейдите по ссылке, чтобы узнать, как создать свой собственный , отделочный материал , или остановитесь на проверенном временем.
— Хэдли Келлер, 9 лет.0077 Красивый дом , 30 ноября 2022 г.
Пасхальный совет: чтобы легко обрезать , приклейте кусок ленты васи к коврику для резки.
— Эмили Ваншмус, Better Homes & Gardens , 20 октября 2022 г.
Наденьте к своим коричневым платьям подходящую куртку, например, флисовый вариант за 49 долларов или модную кожаную байкерскую куртку с отделкой из искусственного меха .
— Клэр Хармейер, 9 лет.0077 Peoplemag , 20 октября 2022 г.
Многие жители ждут поздней зимы, прежде чем начнется рост, и позднего лета, когда многие листья могут увядать, чтобы провести обрезку .
— Том Маккуббин, Orlando Sentinel , 13 августа 2022 г.
Сохраняйте четкость линий с помощью ежедневного подравнивания или бритья , но сохраняя немного большую длину волос на подбородке, вы визуально удлините любую форму лица.
— Гаррет Манс, 9 лет.0077 Мужское здоровье , 10 ноября 2022 г.
Синий верх и желтый низ с розовой отделкой и отделкой также сочетались с улыбкой, и певица подписала пост о себе в ансамбле, рассказав о жизни после свадьбы.
— Джулиана Перри, PEOPLE.com , 5 июля 2022 г.
Узнать больше
Эти примеры предложений автоматически выбираются из различных онлайн-источников новостей, чтобы отразить текущее использование слова «обрезка». Мнения, выраженные в примерах, не отражают точку зрения Merriam-Webster или ее редакторов. Отправьте нам отзыв.
История слов
Первое известное использование
около 1525 года, в значении, определенном в смысле 3
Путешественник во времени
Первое известное использование обрезка была около 1525 г.
Посмотреть другие слова того же года
Словарные статьи Рядом с
обрезка
сигнал триммера
обрезка
обрезная доска
Посмотреть другие записи рядом
Процитировать эту запись
Стиль
MLAЧикагоAPAMМерриам-Вебстер
«Обрезка». Словарь Merriam-Webster.com , Merriam-Webster, https://www.merriam-webster.com/dictionary/trimming. По состоянию на 28 декабря 2022 г.
Копия цитирования
Детское определение
обрезка
существительное
обрезка · мин
ˈtrim-iŋ
1
: Действие одного, которое обрезает
2
:
обрезки для шляпы
индейка со всеми украшениями
Еще от Merriam-Webster об отделке
Английский: Перевод trimming для говорящих на испанском языке
Britannica English: Перевод trimming для говорящих на арабском языке
Последнее обновление:
— Обновлены примеры предложений
Подпишитесь на крупнейший словарь Америки и получите тысячи дополнительных определений и расширенный поиск без рекламы!
Merriam-Webster без сокращений
Обрезка Определение и значение | Dictionary.
com.
[ обрезка ]
/ ˈtrɪm ɪŋ /
Сохранить это слово!
См. синонимы для: обрезки / обрезки на Thesaurus.com
Показывает уровень оценки в зависимости от сложности слова.
сущ.
все, что используется или служит для украшения или дополнения: обрезки рождественской елки.
Обычно обрезки . сопровождение или гарнир к основному блюду: жареная индейка со всеми гарнирами.
обрезки, куски, отрезанные при обрезке, резке, очистке или обрезке.
действие лица или предмета по обрезке.
Неофициальный. избиение или побои.
Неофициальный. поражение: Наша команда выдержала изрядную расчистку.
ВИКТОРИНА
ТЫ НАПЛОНУШЬСЯ НА ЭТИ ВОПРОСЫ ПО ГРАММАТИКЕ?
Плавно переходите к этим распространенным грамматическим ошибкам, которые ставят многих людей в тупик. Удачи!
Вопрос 1 из 7
Заполните пропуск: Я не могу понять, что _____ подарил мне этот подарок.
Переделка обычного 3-х осевого под 4-ю ось от А до Я — Модернизация
#1
OFFLINE
sp34
Отправлено 20 Февраль 2015 — 15:03
Постараюсь описать в этой теме весь процесс переделки обычного 3-х осевого с параметрами Y-1000 X-750 Z-95 под четвертую ось — своими руками и с минимальными затратами !
Начал я с увеличения высоты портала — моя высота была 95мм
Решил остановиться на высоте 175 мм — это чистая высота от стола до портала + возможность передвинуть шпиндель выше в его хомуте крепления (это чисто для плоскости безопасности ) до 30мм !
Изготовил вот такие проставки (они пронизаны 3-я длинными 100мм болтами на сквозь — закрученные в штатные места + дополнительно короткими для жесткости еще два с верху и два с низу ) на фото видно все и установил их.
Далее проверив работоспособность станка и расстояние от стола до фрезы в крайнем левом положении и крайнем правом — увидел разницу в 0. 45мм (очень много) как избавился , да очень просто — кувалдой как дал по той стороне что была выше и все !!!
А теперь серьезно — взял листовую нержавейку 0.45 мм (ее сейчас валом от 0.4 до 0.8) у жестянщиков — которые вытяжки делают и изготовил из нее пластину в моем случае 150х20 с 3-я отверстиями , установил ее между проставкой и порталом с той стороны которая ниже (на фото я стрелкой показал пластину — там ее еле видно) и о чудо разница в высотах по оси Х стала 0.03 мм — ну на этом я решил успокоиться меня устраивает !
Следующим шагом приобретал токарный шпиндель — немного поискав нашел 130мм (с обратными кулачками как раз зажмет 175мм на нем и остановился )
Прикрепленные изображения
Сообщение отредактировал sp34: 20 Февраль 2015 — 15:07
Наверх
#2
OFFLINE
sp34
Отправлено 20 Февраль 2015 — 16:18
В этом сообщении о редукторе для токарного шпинделя!
Посмотрев о предложениях уже готовых поворотных осей — все они крепились на стол в рабочую зону тем самым их надо было либо снимать — чтобы рабочее поле было свободным (тем самым нарушая его установку — об этом позже ) либо смириться с потерей части рабочего поля.
Я решил сделать дополнительную площадку для установки 4-оси рядом с рабочей зоной ! решив при этом выше описанные проблемы и получив преимущество такие как : не занимает рабочее поле , не нужно демонтировать и одна из самых главных (при разведении кулачков они могут выходить далеко за пределы диаметра токарного шпинделя и тем самым упереться в стол , а установив площадку чуть ниже рабочего стола — я этого избежал ! )
Ну это я чуть забежал в перед — и перед изготовления площадки нужно найти подходящий редуктор — тут поиск без ограничений !
Я лично придерживался таких параметров как тип редуктора , компактность , передаточное число и диаметр выходного вала для крепления шпинделя !
Самый точный редуктор — это без спорно волновой , но есть варианты и червячных не плохие !
Соотношение редукции выбирал следующим образом — так как на моем станки стоят ШВП с шагом 05 (это своего рода и есть редуктор — за один оборот вала ШД — ось перемещается на 5мм) — отсюда я и оттолкнулся взяв максимальный диаметр обработки 170мм находим длину круга по формуле L = D * 3. 14 получаем L = 549.5мм делим ее на наш шаг 5мм и получаем соотношение (редукцию) 110 — что это — это если бы редуктор вращать ШД любой из нашей оси то за один оборот ШД на поверхности заготовки в диаметре 175мм будет пройден отрезок в 5мм — получаются точно тикие-же параметры как и у нашего станка , НО !!! есть и второй вариант событий !
Возьмем заготовку ну скажем в 50мм — по выше описанной формуле получаем L = 157мм / 5мм = (редукция) 31 — отсюда видим , что если мы хотим сохранить параметры станка не меняя настройки драйверов и т д на малом диаметре то редукция в 110 нам великовата !
Вывод : если планируете использовать точную обработку (как и на оси Z и Y) на максимальном диаметре то редукция должна быть как в 1 варианте если нет то можно и редукцию чуть меньше !
Лично я остановился на редукторе 1 х 83 так как не планировал ювелирную точность на большом диаметре (но забегая далеко в перед своего описания я решил и эту проблему и теперь я могу поставить любой шаг от 0. 1 до 5.0 на диаметре от 0 до 250мм — но об этом позже !!!)
Диаметр выходного вала редуктора мне попался 30мм , что так же меня устроило (не сталь обрабатывать) !
Тип редуктора червячный — люфт примерно 1 гр (далее я его исключил до 0.2 — об этом позже)
Вот такой редуктор я выбрал ! Волновой — так за гуманные деньги я и не нашел !
Сообщение отредактировал sp34: 20 Февраль 2015 — 16:23
Наверх
#3
OFFLINE
sp34
Отправлено 21 Февраль 2015 — 00:32
Извините не успел фотки прикрепить .
Ниже фото где выступающие кулачки для этого я и обнесли стол и второе общее то что получилось + трапеция для жесткости и гашения вибраций !
Далее изготавливался переходной фланец с осью — вот такого плана.
Затем переход на ШД чертеж и готовое установленное изделие внутри корпуса переходника применил разъемную муфту из D16 c эластичной вставкой и затем ШД тип nema 23 только усиленный ( LONG) на 28 кг с (подбор вел по току в районе 3-х ампер , силе более 20 кг и самое главное минимальной индуктивности (сопротивления в Ом) — для работы двигателя на повышенных оборотах)
Прикрепленные изображения
Сообщение отредактировал sp34: 21 Февраль 2015 — 01:02
Наверх
#4
OFFLINE
sp34
Отправлено 21 Февраль 2015 — 02:46
Теперь о подборе задней бабки — много вариантов рассматривал и опять решил сделать сам !
Приобрел вот такой токарный инструмент. — он копеечный !
И из переходника конус морзе 2 на конус морзе 3 (ВНИМАНИЕ !!! не на оборот 3-й на 2-й !!!) я изготавливаю подвижную ось для корпуса бабки ! а именно всего навсего протачиваю весь хвостовик конуса морзе 2 диаметром 12мм и по всей его длине нарезаю резьбу М12
Затем сам корпус бабки — номер подшипника там указал он двух рядный ну и куда он там устанавливается я думаю понятно !
Чертеж ручки я удалил к сожалению но приложу сборочный чертеж — там все понятно !
1. красные — это стопорные кольца
2..3..4 — видно и так
Саму раму крепления бабки я изготовил из листовой стали при помощи (листогиба , сварки и болгарки)
она крепиться в пазы рабочего стола и перемещается по всей его длине ! И в нее уже сварил корпус бабки — работа очень точная чтобы попасть ровно в центр токарного патрона !!! (заходя в перед у меня получилась не соосность 0.1мм — я переживу)
Прикрепленные изображения
Сообщение отредактировал sp34: 21 Февраль 2015 — 03:09
Наверх
#5
OFFLINE
sp34
Отправлено 24 Февраль 2015 — 02:08
Продолжение . …
Ниже наглядно показано как обработан конус морзе 2 х 3 — из чего и получен шток бабки.
На втором фото бабка в сборе.
Далее узел зажима штока в бабке на чертежах его нет — там ничего сложного (свершится отверстие 5-6 мм (его видно) и от него распил поперек бабки на 50% всего диаметра и вдоль до начала бабки ) — получается своего рода хомут !
На следующей фотке показана как изготовлена ручка — она произвольная без чертежа (видно стопорное кольцо и т д)
И последнее показан рабочий ход — он примерно 70-80мм я думаю достаточно и отверстия можно посверлить если в бабку сверлильный патрон зажать и уж темболее поджать деталь.
После того как все детали готовы произвел сборку всех узлов !!!
Следующие шаги были по проверки соостности — токарного шпинделя и конуса морзе 3
Проверку провел таким образом — без усилия !!! зажал в токарный патрон 20мм — стержень длинной 900мм предварительно отцентрованный в токарном станке , подвел сверху к стержню фрезер с острой фрезой не касаясь стержня 0. 1 — 0.3 мм поработал осью Y по всей длине 900мм — (выявился перекос осей в 1 мм т.е токарный патрон оказался ниже бабки — но не беда (я уже выше описывал данный способ о выравнивании портала) берем 1 мм листовой нерж сталь и изготовил прокладку по всему контору редуктора с токарным шпинделем) — установив ее под редуктор и еще раз проверив все — все несовпадения осей сошли на нет !
Вот так , вся механика готова — и следующее сообщения будут про то — как узнать на какие скорости наша механика способна !
Прикрепленные изображения
Сообщение отредактировал sp34: 24 Февраль 2015 — 02:13
Наверх
Gnuplot 5.0. Spiderplot на 4 оси своими руками / Хабр
При работе над визуализацией данных для статьи возникла необходимость иметь 4 оси с положительными метками на всех.
Как и для других графиков статьи, я решил использовать gnuplot. Первым делом заглянул на официальный сайт, где есть множество примеров. Очень порадовался, когда обнаружил нужный пример (не много поработаю напильником и будет красиво, подумал я).
Быстренько скопировал код, запускаю. Получаю ошибку. Разбираюсь. Оказалось, что у меня старенький gnuplot (Version 5.0 patchlevel 3 last modified 2016-02-21) и он так не умеет.
Зная о гибкости gnuplot, начал шарить просторы всемирной паутины и наткнулся на несколько подходящих примеров на stackoverflow (Double x-axis on a spider plot with Gnuplot и How to Create a Spider Plot in Gnuplot?) и github (gnuplot-radarchart). Они стали отправной точкой.
Далее, мои манипуляции с командами привели к следующему:
0) Отключаем границы
unset border
1) Создаем 4 нулевых линии — 2 основных и 2 дополнительных:
set xzeroaxis
set yzeroaxis
set x2zeroaxis
set y2zeroaxis
Пара слов о нулевых линиях в документации. Данная операция позволяет свести оси в центр рисунка. А дополнительные нужны, чтобы на них отображать положительные тики.
2) Настраиваем отображение тиков на осях:
max = 1.5 # Для гибкости
min = -max
set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35
set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify
set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify
set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify
С тиками на осях настроек чуть больше. axis — где будут находиться тики, на оси или (border — на границе).
Для оси x, которая уходит вправо 0,.5,max. Первое число — начало отсчета, второе — шаг, третье — конец отсчета. Для первой от 0, а для остальных от 0.5, чтобы нули не мешались в начале координат.
Настройка scale 0. 5,0.25 mirror добавляет засечки на ось. Если поиграться с числами, то будет меняться их размер.
Также ввожу переменные max, min, с помощью которых управляю границами осей графика.
Дополнительную информацию по настройке тиков можно найти в документации в разделе Xtics.
3) Настраиваем диапазоны осей:
set xrange [ min : max ]
set yrange [ min : max ]
set x2range [ max : min ]
set y2range [ max : min ]
Здесь следует отметить, что 2 оси начинают отсчет от min на увеличение и 2 оси — с max на уменьшение.
Дополнительная информация в разделе Xrange.
4) Даем осям имена и красиво их размещаем:
set label "H_1" at 0, max center offset char 2, 0
set label "H_2" at max+0.1, 0 center offset char -1, 1
set label "H_3" at 0, min center offset char -2, 0
set label "H_4" at min, 0 center offset char 0, 1
5) Формируем входные данные
На каждый график выделено по 2 столбца. Номер строки — номер оси, пятая строка, чтобы замкнуть контур. Нечетная колонка — координата x, четная — y. Ввиду того, что все точки располагаются на осях, то из пары (x, y) одна всегда равна нулю.
Несмотря на то, что все 4 оси положительные, некоторые данные искусственно перемещаются на отрицательную половину, потому что располагаются на основных осях x и y.
#!/usr/bin/gnuplot -persist
#файл в кодировке cp1251 чтоб русские буквы отображались в eps
set encoding cp1251
set terminal postscript eps enhanced monochrome size 5cm,5cm
set output "./img/eps/fig2.eps"
unset border
set key at -2, 1.5 font 'LiberationSerif, 23'
set key left top samplen 4.5
set xzeroaxis
set yzeroaxis
set x2zeroaxis
set y2zeroaxis
max = 1. 5
min = -max
set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35 font 'LiberationSerif, 20
set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set xrange [ min : max ]
set yrange [ min : max ]
set x2range [ max : min ]
set y2range [ max : min ]
set label "H_1" at 0, max center offset char 2, 0 font 'LiberationSerif, 23'
set label "H_2" at max+0.1, 0 center offset char -1, 1 font 'LiberationSerif, 23'
set label "H_3" at 0, min center offset char -2, 0 font 'LiberationSerif, 23'
set label "H_4" at min, 0 center offset char 0, 1 font 'LiberationSerif, 23'
set style line 1 linetype 1 pointtype 7 linewidth 3 linecolor black
set style line 2 linetype 2 pointtype 7 linewidth 3 linecolor black
plot 'data. csv' using 1:2 title "1" w lp ls 1 ,\
'data.csv' using 3:4 title "2" w lp ls 2
DIY ЧПУ 4-я ось с тормозом
Посмотреть галерею
Команда (1)
Фернандо
Присоединяйтесь к команде этого проекта
завершенный проект
аппаратное обеспечение
Этот проект был
создано 04.02.2020
и последний раз обновлялся 3 года назад.
Основой проекта является импортированный из Японии привод подавления гармоник 100:1. Для компактности я выбрал один из их блоков CSD (CSD-25-100-2A-GR-SP), который имеет общую длину всего 17 мм и внешний диаметр 85 мм. Номинальный крутящий момент для этой модели составляет 47 Нм при 2000 об/мин, с ограничением 110 Нм для повторного крутящего момента.
Вход гармонического привода управляется шаговым двигателем с обратной связью 4,6 Нм (Nema 34). Выходная сторона прикреплена к валу с наружным диаметром 40 мм, поддерживаемому парой прецизионных конических роликоподшипников P5 (32008 XA P5), при этом узел удерживается внутри стального корпуса кубической формы со стороной 120 мм.
Детали
Интересная часть этого проекта, на мой взгляд, электромагнитный тормоз. Большинство самодельных сборок 4-й оси, которые я нашел в Интернете и основаны на гармонических приводах, не включают тормоз. Это приводит к некоторым проблемам с производительностью, поскольку гармонические приводы заметно не очень жесткие на кручение устройства. Например, для выбранного мной привода крутящий момент 10 Нм на выходе приводит к крутильному смещению 76 угловых секунд. Это линейное смещение 28 микрон при радиусе 75 мм. Это означает, что мы можем выполнять только очень легкую обработку или очень маленькие детали…
Поскольку я планирую использовать эту 4-ю ось в основном только для индексации, наличие тормоза в основном решает эту проблему жесткости.
Тормоз состоит из алюминиевого диска, прикрепленного к основному валу через осевой изгиб (пришлось перебрать 2 варианта изгиба, пока не нашел подходящую конструкцию). По умолчанию диск прижат стальной пластиной к неподвижному алюминиевому корпусу. Эта пластина предварительно нагружена 8 пакетами тарельчатых (пружинных) шайб, закрепленных на винтах с внутренним шестигранником M5. Преднатяг пружины, определяющий тормозной момент, можно регулировать, затягивая или ослабляя винты M5.
Использование алюминия в качестве тормозных поверхностей может показаться странным выбором, но эта комбинация материалов на самом деле имеет довольно высокий статический коэффициент трения (около 1,0, в зависимости от источника данных). Поскольку цель этого «тормоза» состоит в том, чтобы зафиксировать 2 поверхности вместе, а не на самом деле ломать (то есть, поверхности скользят вместе), я не ожидаю слишком много проблем с износом или истиранием алюминиевых поверхностей. Но я могу ошибаться, и если я новый диск и корпус можно легко сделать из разных материалов.
Когда дело доходит до приведения в действие тормозов, существует множество доступных способов (гидравлический, пневматический, гидравлический вместо пневматического и т. д.). Я выбрал электромагнитный привод, так как его было довольно легко аккуратно интегрировать в 4-ю ось и просто подключить к обрабатывающему центру, в который он войдет.
Привод состоит из 700-витковой катушки из эмалированной медной проволоки диаметром 0,65 мм, вставленной в переднюю часть стального подшипникового узла. В состоянии покоя зазор между стальной пластиной, которая предварительно нагружает тормоз, и стальным подшипниковым блоком составляет 0,2 мм. Когда на катушку подается ток 2,4 А, магнитные силы оттягивают стальную пластину от алюминиевого диска, тем самым отпуская тормоз. Как только стальная пластина приклеится к стальному подшипниковому блоку, ток можно уменьшить вдвое (около 1,2 А), чтобы не перегреть и не сжечь катушку. На практике это достигается включением резистора последовательно с катушкой через реле задержки.
Измеренный удерживающий момент для оптимального предварительного натяга составил около 90 Нм, что кажется разумным для 4-й оси такого размера, которая будет использоваться в основном для обработки алюминиевых деталей. Измеренный люфт (который возникает как из-за гистерезисных потерь внутри гармонического привода, так и из-за дискретных шагов шагового двигателя) составил около 18 угловых секунд без нагрузки.
Я надеюсь, что это может быть полезно/вдохновить всех, кто думает о создании 4-й оси своими руками.
IMG_7.jpg
Тормозная катушка и стальной корпус подшипника
Изображение в формате JPEG — 1,13 МБ — 04. 02.2020 в 12:01
Предварительный просмотр
Скачать
IMG_6.jpg
Контргайка предварительного натяга главного вала и подшипника
Изображение в формате JPEG — 912,09 КБ — 04. 02.2020 в 12:01
Предварительный просмотр
Скачать
IMG_26.jpg
Тормозной узел
Изображение в формате JPEG — 1,31 МБ — 04. 02.2020 в 12:01
Предварительный просмотр
Скачать
IMG_14.jpg
Обработка тормозного диска (версия 2.0)
Изображение в формате JPEG — 1,77 МБ — 04. 02.2020 в 12:01
Предварительный просмотр
Скачать
IMG_13.jpg
Подшипники с предварительным натягом
Изображение в формате JPEG — 1,34 МБ — 04. 02.2020 в 12:01
Предварительный просмотр
Скачать
Просмотреть все 22 файла
Нравится этот проект?
Делиться
HobbyCNC 3- и 4-осевой драйвер шагового двигателя для DIY ЧПУ
HobbyCNC 3- и 4-осевой драйвер шагового двигателя. Компактный, мощный, простой в сборке. Для фрезерного, фрезерного, токарного станка или робота с ЧПУ своими руками!
Только высококачественные компоненты от основных производителей
Минимальный счет и собирайте его сами
Легкие для следования пошаговых направлений
Drive 3 или 4 steppers. до 3 ампер каждый
С 1999 года HobbyCNC продает различные высококачественные изделия с ЧПУ для хобби: комплекты контроллеров шаговых двигателей, чертежи фрезерных станков с ЧПУ и шаговые двигатели для настольных машинистов и любителей.
Наборы драйверов шаговых двигателей HobbyCNC
PRO 3 Axis Kit
Модернизируемый
$ 79
3 Axis
Модернизируемый до 4 TH AXIS
42 DCV MAX вход
6,8 ″ x 3,7 ″ (173 x 94 мм)
Current Current Current
3.0. 5-, 6- или 8-проводные степперы (4-проводные не используются)
Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
Соединения исходного/предельного выключателя
Радиатор
Узнать больше
Комплект PRO 4 Axis
Полностью загружен
$ 105
4 Axis
Обновляется до 4 TH AXIS
42 DCV MAX вход
6,8 ″ x 3,7 ″ (173 x 94 мм)
Идентификационный ток.
5-, 6- или 8-проводные степперы (4-проводные не используются)
Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
Соединения исходного/конечного выключателя
Радиатор
Узнать больше
PRO 4 оси
Собрано и протестировано
$ 174
4 Axis
Обновление до 4 TH AXIS
42 DCV MAX вход
6,8 ″ x 3,7 ″ (173 x 94 мм)
Cuccure Current
3.0.0.0.0
5-, 6- или 8-проводные степперы (4-проводные не используются)
Микрошаговые (1/1, 1/2, 1/4, 1/8 и 1/16)
Соединения исходного/конечного выключателя
Радиатор
Узнать больше
Комплект защиты Arduino
Arduino Uno/GRBL для PRO
24,95 $
Плата Arduino® UNO для подключения к HobbyCNC PRO
Оптоизолированные входы. Предел X, Y и Z и датчик.
Внешний источник питания 6 В пост. тока (в комплекте)
При выборе надежного триммера для дома или работы пользовали часто останавливаются на компании Husqvarna. Шведский производитель много лет является флагманом садово-паркового и лесного оборудования, регулярно обновляет модельные линейки и внедряет собственные разработки. В ТОП-7 лучших триммеров Husqvarna наша редакция включила семь топовых моделей, которые пользователи оценили выше прочих. Электрические и бензиновые косы шведского бренда завоевали популярность не случайно. Устройства отлично обрабатывают участки с самым сложным рельефом, просты в обращении и неприхотливы. А внедрение уникальных технологий вывели продукцию в ранг лидеров по качеству и надежности.
Содержание:
Лучшие бензиновые триммеры Husqvarna
1. Husqvarna 236R
2. Husqvarna 128R
3. Husqvarna 143R-II
4. Husqvarna 545RX
Лучшие электрические триммеры Husqvarna
1. Husqvarna 536LiLX
2. Husqvarna 115iL (967 09 88-01)
3. Husqvarna 520iLX
Какой триммер Husqvarna выбрать
Лучшие бензиновые триммеры Husqvarna
Разрабатывать качественные бензиновые триммеры для травы – стиль бренда Husqvarna. Важные особенности бензиновых кос компании – собственные уникальные технологии:
LowVib – эффективная система гашения вибрации;
X-Torq – не имеющая аналогов технология разработки двигателя, которая снизила выбросы на 75% и сделала его экономичнее на 20%;
E-TECH® II – еще одна технология, которая обеспечивает высокую экологичность без ущерба для показателя мощности;
Smart Start® – система легкого запуска для комфортной работы и долгого срока службы стартера.
Практически все модели отличает простая замена режущих элементов и регулируемые рукоятки, позволяющие адаптировать триммер полностью под свои данные. Бензиновая техника Хускварна подходит и для дома, и для профессионального использования – благоустройства территорий парков, скверов, а также для коммунальных служб.
1. Husqvarna 236R
Один из лучших триммеров фирмы Хускварна отличается неприхотливостью, увеличенным ресурсом и достаточной для обработки больших площадей мощностью. Как свидетельствуют многочисленные положительные отзывы, ножом триммер срубает ветки и кустарники толщиною свыше 2 см даже на средних оборотах, а на максимальных справляется и с более сложными порослями. Также его хвалят за отличную сбалансированную конструкцию, высокое качество изготовления и возможность работать без перерывов «от заправки до заправки». Единственный выявленный недостаток относится не к самому триммеру, а к ножу, идущему в комплектации, который изначально требует заточки.
Достоинства:
отсутствие вибраций;
небольшой вес;
качество деталей и сборки;
сбалансированная конструкция;
низкий расход топлива;
подходит и для мужчин, и для женщин.
Недостатки:
в комплекте поставляется плохо заточенный нож;
неинформативная инструкция.
2. Husqvarna 128R
Хороший и недорогой бензотриммер Husqvarna 128R – один из самых легких в модельном ряду – его вес всего 5 кг. При этом он достаточно производителен и способен срезать любую траву от небольших сорняков до жесткого сухостоя. Как и более мощные косы, эта популярная модель триммера оснащается всеми фирменными «примочками», облегчающими работу оператора. В первую очередь – это функция легкого запуска, благодаря которой нет необходимости интенсивно дергать за ручку стартера. Помимо этого, на инструмент установлена очень удобная Т-образная ручка с возможностью регулировки во всех плоскостях и полноценный разгрузочный ремень, распределяющий вес на оба плеча.
Достоинства:
низкая цена;
малый вес;
небольшой расход топлива;
пригоден для обработки больших участков;
хорошее качество комплектующих.
3. Husqvarna 143R-II
Благодаря мощному двигателю профессиональный триммер Husqvarna подойдет не только для дачи, но и для большого участка в 25-30 соток. Для безотказной работы он оснащен неразборной прямой штангой и надежной системой фильтрации поступающего в мотор воздуха. Комфорт и удобство обеспечивают плечевой ремень с регулировкой и хорошая виброзащита. По мнению владельцев – это лучший триммер в сочетании цена-качество. К недостаткам относят сравнительно большой расход топлива, однако, это плата за высокую производительность инструмента.
Достоинства:
подходит для больших площадей;
высокий ресурс;
отсутствие вибраций и низкий уровень шума;
легкая замена лески;
надежность и выносливость в работе;
большой запас мощности.
Недостатки:
ощутимый расход топлива.
4. Husqvarna 545RX
Мощный триммер Husqvarna с двигателем в 2. 8 л.с. подходит не только для бытового применения, но и для работы в коммунальных хозяйствах и других профессиональных сферах. За счет увеличенных оборотов и значительной энерговооруженности он способен срезать кусты и небольшие деревья, и по отзывам покупателей, в большинстве случаев, даже не требуется открывать газ полностью. Помимо этого, бензотриммер оснащен системой предварительной очистки воздуха, сохраняющей основной фильтр в чистоте даже после продолжительной работы. И очень удобной разгрузкой, полностью нивелирующей большую массу инструмента.
Достоинства:
большая мощность;
дополнительная фильтрация воздуха;
высокая производительность;
легкий запуск;
отличная эргономика;
прочный приводной вал;
экологичный мотор X-Torq.
Недостатки:
большая масса;
высокая стоимость.
Лучшие электрические триммеры Husqvarna
ТОП-3 лучших электрических триммеров включил только аккумуляторные модели. Их веские преимущества – высокая мобильность, легкость, а отсутствие бензинового двигателя упростило обслуживание до элементарного.
Как и мотокосы, аккумуляторные не лишены передовых технологий Husqvarna – легкая и безопасная замена оснастки, удобные регулировки, эффективное гашение вибрации. А система SavE гарантирует длительную работу устройства без подзарядки. При этом аккумуляторная техника не уступила бензиновой по ключевым параметрам – площади обрабатываемой поверхности и мощности.
Важное преимущество аккумуляторных моделей – минимальный шум даже при интенсивной работе. Это лучший выбор, если тишина – основной критерий комфортного использования.
1. Husqvarna 536LiLX
Самая легкая аккумуляторная модель в линейке оснащена современным, бесщеточным мотором собственной разработки Husqvarna, с увеличенной на 25 процентов эффективностью. Дополнительно у инструмента есть режим SaveTM, обеспечивающий максимальную экономичность и обратный ход режущего элемента. Управляется триммер всего тремя кнопками, которые расположены на удобной рукоятке корпуса, а идеальная развесовка и малый вес позволяют работать даже одной рукой.
Достоинства:
малый вес;
простота управления;
надежный бесщеточный двигатель;
хорошая эргономика;
есть режим экономии энергии.
Недостатки:
в комплектации нет ножа и подвеса.
высокая стоимость.
2. Husqvarna 115iL (967 09 88-01)
Недорогой, надежный триммер с питанием от АКБ дает полную свободу от проводов и возможность работать там, где нет электричества. Тихий электромотор бесщеточного типа работает в паре с Li-ion аккумулятором, рассчитанным на 1500 циклов зарядки, и обеспечивает максимальный комфорт при работе. Телескопическая штанга значительно упрощает транспортировку и хранение триммера, а функция SavE увеличит время непрерывной работы на одном заряде в случае необходимости.
Достоинства:
телескопическая штанга;
бесщеточный мотор;
прекрасная балансировка;
низкая цена;
бесшумность;
функция save.
Недостатки:
широкий защитный кожух цепляет почву.
3. Husqvarna 520iLX
Одна из самых технологичных моделей бренда пользуется большой популярностью не только у простых пользователей, но и у профессионалов, занимающихся ландшафтным дизайном, а также садовников. Питание от аккумулятора дает триммеру необходимую мобильность и значительно расширяет его возможности. Выделяется инструмент и наличием влагозащиты стандарта IPX4, благодаря которой производитель допускает работу при любых погодных условиях, даже под дождем. По отзывам покупателей, триммер электрический Husqvarna по своим характеристикам полностью сопоставим с проводными аналогами, а по функционалу их превосходит.
Достоинства:
мобильность;
возможность работать при осадках;
универсальное гнездо под различные типоразмеры АКБ;
реверс;
высокое качество изготовления.
Недостатки:
высокая стоимость.
Какой триммер Husqvarna выбрать
Прежде, чем купить триммер для травы, необходимо определиться с его основными характеристиками:
мощность;
площадь обработки;
емкость аккумулятора или объем двигателя.
Чтобы выбрать самый лучший триммер от Husqvarna, необходимо разобраться с плюсами и минусами различных моделей. Устройства с бензиновым двигателем независимы от электричества, очень производительны и могут использоваться в любых условиях. При этом они тяжелее электрических, с питанием от аккумулятора и более требовательны в обслуживании – оператору необходимо понимать, как обращаться с бензотехникой. Также стоит учитывать, что не все модели комплектуются ножом и подходят для жесткой травы.
Электрические косы, в частности, аккумуляторные менее прихотливы в обслуживании, легче, тише, не выделяют выхлопных газов. Но время работы ограничено емкостью и количеством батарей.
Струнные триммеры | Husqvarna US
CameroonCȏte d’lovioreEgyptEquatorial GuineaGambiaGhanaGuinea BissauIsraelKenyaKuwaitLebanonLiberiaMozambiqueOmanQatarSaudi ArabiaSenegalSeychellesSouth AfricaTanzaniaTunisiaTurkeyUgandaUnited Arab EmiratesZambiaZimbabwe
AustraliaAzerbaijanMainland ChinaFijiFrench PolynesiaHong KongIndiaIndonesiaJapanKazakhstanMalaysiaNew CaledoniaNew ZealandPapua New GuineaThe PhilippinesSingaporeSouth KoreaTaiwanThailandTurkmenistanUzbekistanVanuatuVietnam
ArgentinaBoliviaBrazilChileColombiaCosta RicaDominican RepublicEcuadorGuatemalaMexicoNicaraguaRepublic of ПанамаПарагвайПеруУругвай
Канада (en)Канада (fr)МексикаСША
Категории продуктов
Являетесь ли вы профессионалом или любителем выходного дня, найдите лучший триммер для сорняков для следующей задачи по уходу за газоном с новым аккумулятором, бензиновым или комбинированным триммером. от Хускварна.
ArgentinaBoliviaBrazilChileColombiaCosta RicaDominican RepublicEcuadorGuatemalaMexicoNicaraguaRepublic of ПанамаПарагвайПеруУругвай
Канада (en)Канада (fr)МексикаСША
Категории продуктов
Husqvarna предлагает лучшую линейку газовых триммеров для различных работ по обрезке и окантовке, независимо от того, являетесь ли вы коммерческим ландшафтным дизайнером или домовладельцем, работающим на заднем дворе. .
Подробнее
Газовые триммеры
Газовые триммеры
130C
Рабочий объем цилиндра 1,7 куб.дюйма Выходная мощность1 л.с.0002 цилиндр смещения1,7 Cu.inchpower Выход1 HP
газовые триммеры
122C
Diflameding1,3 Cu.inchpower Outwork0,8 HP
газовые триммерные триммеры
128L
DAPLINGER -INPLAY1.7.
Газовые триммеры
430LS
Рабочий объем цилиндра 1,8 куб.дюйма Выходная мощность 1,3 л.с.0003
Gas String Trimmers
535LST
Cylinder displacement2.11 cu.inchPower output2.15 hp
Gas String Trimmers
525LK
Cylinder displacement1.55 cu.inchPower output1.34 hp
Промышленный робот официально определен Международной организацией по стандартизации ( ISO ) в качестве системы с автоматическим управлением, мульти-приложений, перепрограммируемые, многофункциональная, манипулятором программируемые в три или более осей.
Типичные области применения включают роботов для сварки, покраски и сборки . Преимущество промышленной робототехники — это скорость выполнения и точность, а также повторение этой точности с течением времени.
Однако опрос, проведенный ОЭСР в 2018 году, показывает, что промышленная роботизация означает потерю рабочих мест примерно на 15% и изменение для 32% из них.
Промышленные роботы широко используются в автомобильной промышленности . Их проектирование требует хороших технических знаний и очень высокого уровня в области инженерии .
Резюме
1 Определение
2 История
3 Промышленная робототехника в мире
4 Области использования
5 типов промышленных роботов
5. 1 Шарнирно-сочлененные роботы
5.2 Декартовы роботы
5.3 Цилиндрические роботы
5.4 Дельта-роботы
5.5 Полярные роботы
5.6 Роботы SCARA
6 Эксплуатация
7 Программирование
8 производителей
9 Список промышленных роботов
9.1 Промышленные роботы
9.2 Доильные роботы (сельское хозяйство)
10 Примечания и ссылки
10.1 Примечания
10.2 Ссылки
11 Приложения
11.1 Статьи по теме
11.2 Внешние ссылки
Определение
Промышленный робот Motoman SDA10, сборочный робот
Промышленный робот — это система, имеющая несколько осей, таких как человеческая рука, часто состоящая из шести степеней свободы, трех осей, предназначенных для позиционирования, и трех осей для ориентации, позволяющих перемещать и ориентировать инструмент (исполнительный орган) в заданном рабочем пространстве.
Мы можем выделить:
сборочные роботы часто меньших размеров,
мобильные роботы, предназначенные для инспекций, часто связанные с искусственным интеллектом и способные в некоторых случаях учитывать окружающую среду.
Робот состоит из механической части, самой руки, шкафа управления, состоящего из центрального блока, который управляет управляющей электроникой одной или нескольких осей, обеспечивающих сервоуправление приводами с регулируемой скоростью. Скорость и специализированный язык программирования, позволяющий управлять роботом (LM, разработанный Ensimag Grenoble, базовый язык типа Adept), который объединяет преобразователь координат для преобразования декартовых значений в данные кодировщика двигателя.
Некоторые роботы имеют режим обучения, который позволяет повторять движения, выполняемые свободно вручную, при этом важным элементом является верность способности робота последовательно достигать одного и того же положения в пределах определенного допуска, процедура калибровки позволяет принимать нулевое значение. каждая из осей. Их можно связать с системой искусственного зрения, которая позволяет им корректировать движения.
Из соображений безопасности эти роботы защищены клетками или кожухами, чтобы люди не приближались к ним слишком близко.
Распространение и совершенствование робототехники позволяет фабрикам работать в темноте .
История
Предки роботов роботов, тем XVII — го века. В некотором смысле, поскольку компьютеры сделали их полностью интерактивными с людьми, первые роботы были первыми компьютерами, разработанными во время Второй мировой войны и созданными вскоре после этого. Но их действия ограничиваются интеллектуальными операциями, поэтому первые роботы, строго говоря, представляют собой устройства, которые, синтезируя автоматы и компьютеры, могут автоматически выполнять физические задачи вместо людей, причем более эффективно, быстро и точно.
В 1954 году американец Джордж Девол подал патент на первого промышленного робота Unimate . Это шарнирно-сочлененная рука, способная переносить объект из одного места в другое, вдохновленная телеоператорами, использовавшимися в ядерной промышленности в 1950-х годах для манипулирования радиоактивными элементами.
В 1956 году партнером Devol Джозефом Энгельбергером была создана компания Unimation Inc.
В 1961 году Unimate был установлен на сборочных линиях завода Ewing Township (принадлежащего General Motors и расположенного в пригороде Трентона, штат Нью-Джерси ), Unimate . Он отвечает за то, чтобы собирать куски металла при очень высоких температурах и перемещать их в охлаждающие ванны. В то время руководство General Motors не публиковало информацию, полагая, что это экспериментальный процесс, который может не сработать. Однако в итоге было заказано 66 экземпляров.
В 1968 году Unimation была мировым лидером в области робототехники.
В 1976 году первой компанией, внедрившей свою продукцию во Франции, была Renault в 1976 году.
В 1983 году компания Westinghouse (у истоков первых роботов-гуманоидов ) купила Unimation Inc. , а три года спустя продала ее Stäubli .
Промышленная робототехника по всему миру
По данным Министерства промышленности Франции, общее количество промышленных роботов в мире оценивается как минимум в 1,15 миллиона в 2010 году и ожидается, что в 2017 году ожидается 3,58 миллиона. Эти оценки основаны на предположении, что средний срок службы составляет 12 штук. годы. При средней продолжительности жизни в 15 лет в 2011 году будет 1,4 миллиона промышленных роботов.
Около 69 000 промышленных роботов было произведено в мире в 1998 году, 120 000 в 2005 году, но 113 000 в 2008 году. Производство резко упало в 2009 году (60 000), чтобы снова подняться (120 600 в 2010 году, 166 000 в 2011 году, 207 500 ожидается в 2015 году).
В 2011 году объем продаж промышленных роботов составил 9,5 миллиарда долларов. Рынок промышленных роботизированных систем, включая программное обеспечение, периферийные устройства и системную инженерию, оценивается в 28,5 млрд долларов в 2011 году; ожидается, что в будущем он будет увеличиваться, но более низкими темпами, чем в прошлом.
По данным Международной федерации робототехники, Китай является рынком номер один для промышленных роботов: в 2017 году было продано 141000 единиц, что составляет ежегодный скачок на 58,1% и составляет треть мирового спроса.
Области использования
Промышленные роботы были сначала разработаны для работы в среде с высоким риском ( ядерной, сильно корродированной и т. Д.), А затем в автомобиле с роботом Unimate, первым промышленным роботом американской компании Unimation, в начале 1960-х годов.
Они также часто используются при работе с тяжелыми предметами.
Небольшая точность сборки на небольших сериях.
Виды промышленных роботов
Шарнирно-сочлененные роботы за работой на заводе
Некоторые роботы запрограммированы на точное выполнение определенных повторяющихся действий. Они запрограммированы с высокой степенью точности. Другие роботы гораздо более гибкие. Например, они используются в живописи. Искусственный интеллект является важным фактором в промышленной робототехнике.
Шарнирно-сочлененные роботы
В шарнирных роботах являются наиболее распространенными промышленными роботами. Они похожи на человеческую руку, поэтому их еще называют роботизированной рукой или рукой манипулятора . Их шарнирно-сочлененные конструкции с несколькими степенями свободы обеспечивают шарнирно-сочлененным рукам широкий диапазон движений.
Декартовы роботы
Декартов робот с 5 осями для пластмассовой промышленности
Мы называем декартовым роботом роботов, имеющих шарнирные соединения призматического типа для перемещения инструмента, но обязательно 3 ротоида для ориентации этого инструмента.
Чтобы иметь возможность перемещать и ориентировать эффекторный орган во всех направлениях в 3D, такому роботу необходимо 6 осей: 3 призматических для движения, 3 ротоида для ориентации. В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
Цилиндрические роботы
Эти цилиндрические роботы различаются по их радиальному уплотнению в основании и по меньшей мере один призматические уплотнение элементов, соединяющие. Они могут перемещаться вертикально и горизонтально, скользя. Компактная конструкция исполнительного механизма позволяет роботу достигать тесных рабочих пространств без потери скорости.
Дельта-роботы
В роботы Delta также называют робот параллельным соединением. Они состоят из параллельных звеньев, соединенных с общей базой. Роботы Delta особенно полезны для задач прямого управления и операций с высоким маневрированием (например, для задач быстрой посадки и высадки). Роботы Delta используют систему четырех стержневых или параллелограммных рычагов .
Полярные роботы
Мы называем полярным роботом роботов, имеющих только сочленения ротоидного типа . Чтобы иметь возможность перемещать и ориентировать эффекторный орган во всех направлениях в 3D, такому роботу необходимо 6 осей: 3 для движения, 3 для ориентации. В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
Роботы SCARA
SCARA — это аббревиатура от Selective Compliance Assembly Robot Arm . Роботов SCARA можно узнать по двум параллельным шарнирам, которые обеспечивают движение в плоскости XY. Вращающиеся валы расположены вертикально, а концевой эффектор перемещается горизонтально.
Роботы SCARA используются для выполнения работ, требующих точных боковых перемещений, и они идеально подходят для сборки.
Функционирование
Одни роботы используют электродвигатели, другие — гидроцилиндры . Первые работают быстрее, вторые — прочнее и удобнее в таких применениях, как распыление краски.
Программирование
Программирование движений робота на компьютере
Движения промышленного робота программируются двумя основными способами.
Метод обучения впервые появился в истории. Он состоит в создании траекторий, заставляя робота запоминать точки, соответствующие декартовым координатам и определяющие его положение. Это делается непосредственно на роботе с помощью блока управления.
Второй и более свежий метод — это автономное программирование . На специальном рабочем компьютере оператор может запрограммировать следующую задачу с помощью программного обеспечения для автономного программирования, импортировав модель САПР, с помощью которой он может генерировать движения. Затем он сможет визуализировать результат своего программирования с помощью интегрированного симулятора, который представляет собой виртуальное представление рабочей среды робота со всеми ее компонентами.
1. Перейти к P1
2. Перейдите к P2.
3. Перейдите на P3.
4. Закройте зажим.
5. Перейдите к P2.
6. Перейти к P4.
7. Перейти к P5.
8. Откройте зажим.
9. Перейти к P4.
10. Перейдите к P1 и закончите.
Строители
Япония : OMRON Corporation
Швейцария : Stäubli International AG
Швейцария / Швеция : ABB Robotics
США : Adept Technology
Германия : Bosch
Германия : Cloos GmbH
Германия : Festo
Германия : Дюрр (живопись)
Германия : Ротег
Австрия : IGM
Италия : Комау
Япония : DENSO Robotics
Япония : Epson Robots
Япония : FANUC Robotics
Япония : Fuji Yusoki Robotics
Южная Корея : Hyundai Robotics
Япония : интеллектуальный привод (IAI)
США : Intelitek
Япония : Яноме
Япония : Kawasaki Heavy Industries
Германия : Кука
Испания : Локсин
Франция : Робототехника Шавериа
Франция : LUCAS France
Франция : MIP robotics
Япония : Mitsubishi Electric.
Япония : Яскава-мотоман
Япония : Nachi Robotic Systems Inc.
Япония : Нидек Санкё
Япония : OTC-Daihen
Япония : Panasonic Corporation
Германия : Reis Robotics
Южная Корея : Samsung
Франция : SCEMI (бывшая дочерняя компания Alsthom), деятельность которой в области робототехники прекратилась в 1980-х годах.
Франция : SEPRO Group
США / Великобритания : ST Robotics
Япония : Toshiba Machine
Дания : универсальные роботы
Япония : Yamaha Motor Company
Список промышленных роботов
Промышленные роботы
Air-Cobot, мобильный робот для совместной работы, предназначенный для осмотра внешнего вида самолета .
Адепт Кватро, робот с четырьмя руками
FANUC Robotics — лидер отрасли
Кука Фамулус, первый 6-осевой робот с электромеханическим приводом (1973)
Лемур, промышленный робот на 6 ногах
MIP robotics Junior 300: коллаборативный четырехосевой манипулятор нового поколения
Motoman SDA10, робот, который готовит
Робот Delta, робот с манипулятором, состоящим из трех параллелограммов
Робот-дельта 360 ° в версии 2D и 3D: изобретенные Питером Бамбурой в 2013 году «Робот-дельта», эти роботы предназначены для сборки мелких деталей путем копирования режима сборки оператора.
Stäubli, Ассортимент промышленных роботов
Unimate, то 1 — й промышленный робот
Universal Robots, создатель первых роботов для совместной работы, предназначенных для работы вместе с операторами
Доильные роботы (сельское хозяйство)
Испытания автоматизированного доения были предприняты в 1980-х годах, в частности, Исследовательским институтом сельскохозяйственной и экологической инженерии (CEMAGREF) во Франции. Основная трудность связана с определением местоположения вымени коровы, которое сильно варьируется от одной коровы к другой, но также и для одной и той же коровы в зависимости от периода. Доильные роботы разрабатывают либо основные производители доильного оборудования, либо специализированные компании.
Доильный робот Proflex BouMatic
Доильный робот VMS Delaval
Доильный робот Lely Astronaut
Доильный робот Titan Westfalia Surge
Доильный робот Merlin Fullwood
Доильный робот RDS Futureline SAC Christensen, использующий промышленного робота для работы с доильными аппаратами.
Примечания и ссылки
Примечания
↑ От имени их конструкторов Latombe-Mazer
↑ Некоторые авторы также говорят о повторяемости
использованная литература
↑ ОЭСР, « Риски автоматизации рабочих мест значительно различаются в зависимости от региона внутри страны », на oecd.org ,(по состоянию на 12 октября 2020 г. )
↑ a b c d and e L’usine nouvelle, 30 июля 2014 г.
↑ Блог-канал, февраль 2012 г.
↑ World Robotics 2012 — Промышленные роботы. Краткое содержание, стр. 8-18 . Пресс-конференция IFR, Тайбэй, 30 августа. 2012, 14 с.
↑ BFMTV, « В Китае роботы готовы заменить людей, чтобы революционизировать экономику », на BFMTV (по состоянию на 20 августа 2018 г. )
↑ a b c d e f g и h « Техническое руководство OSHA (OTM) | Раздел IV: Глава 4 — Промышленные роботы и безопасность робототехнических систем | Администрация по охране труда » на сайте www.osha.gov (по состоянию на 14 ноября 2020 г. ).
↑ a b c d and e (ru-CA) Гуарана-DIY, « Шесть основных типов промышленных роботов в 2020 году », о DIY-Robotics ,(по состоянию на 14 ноября 2020 г. )
↑ a и b « Промышленная робототехника: практическое руководство » на сайте www.usinenouvelle.com (по состоянию на 12 октября 2020 г. )
↑ « Как узнать, подходит ли робот SCARA для вашего приложения », на сайте www. fanuc.eu (по состоянию на 14 ноября 2020 г. )
↑ » Air-Cobot: новый визуальный метод контроля для самолетов «, на competitivite.gouv.fr, Les Поляки де конкурентоспособность (доступ к 29 мая 2016 )
↑ « Проект Air-Cobot продолжается », Air et Cosmos ,( читайте онлайн, консультация 29 мая 2016 г. )
↑ « Fanuc Robotics — The Industry Leader », на RobotWorx (по состоянию на 14 ноября 2020 г. )
Приложения
Статьи по Теме
Поточная линия
Фордизм
Автономное программирование
Роботмастер
Промышленность
Управление
Производство
Продуктивизм
Робот
Робототехника
Тейлоризм
Тойотизм
внешние ссылки
История робототехники, Go Tronic
( fr) Промышленные роботы
(ru) IFR — Международная федерация робототехники
(in) Риа — Робототехника онлайн
— Япония и Корея по-прежнему лидируют
Антропоморфный робот FEDOR полетел в космос пресс-релизом НПО «Андроид-технологии» 22 августа 2019 года.
[видео] Робот Алеша, «брат» Федора (позывной : МПМ-100) — Официальный видеоматериал Росатома на YouTube
Определение робота. Классификация роботов (Обзор Сбербанка, часть 2) — Журнал «Я Robot»
Сбербанк на форуме Skolkovo Robotics 24 апреля представил аналитический обзор мирового рынка робототехники. Обзор подготовлен Лабораторией робототехники Сбербанка. Вторая часть обзора — «Определение робота. Классификация роботов».
ОПРЕДЕЛЕНИЕ РОБОТА
Международный стандарт ISO 8373:2012 определяет робота как приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий предназначенные ему задачи.
На наш взгляд, более полезным для понимания того, что есть робот, может быть функциональное определение (определение STA, рисунок 1): роботом можно назвать любое устройство (механизм), выполняющее предназначенные ему действия, которое одновременно отвечает трем условиям.
Рисунок 1. Определение STA
1. SENSE: воспринимать окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электро механические сенсоры и прочее.
2. THINK: понимать окружающий физический мир и строить модели поведения, для того чтобы выполнять предназначенные ему действия.
3. ACT: воздействовать на физический мир, тем или иным способом.
ЕСЛИ ОДНО ИЗ ВЫШЕНАЗВАННЫХ УСЛОВИЙ НЕ ВЫПОЛНЯЕТСЯ, ТО УСТРОЙСТВО НЕ ЯВЛЯЕТСЯ РОБОТОМ.
К примеру, автономное транспортное средство можно отнести к робототехнике. Робот-автомобиль обладает сенсорами (SENSE), строит модели, понимает окружающий мир и принимает решения (THINK) и совершает необходимые действия, чтобы двигаться, выполняя свою задачу (ACT) (перевезти пассажиров или груз).
Такой робот работает в невероятно сложной, недетерминированной среде, в которой постоянно возникает громадное количество непредвиденных ситуаций. Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время.
С другой стороны, устройство, которое может воспринимать окружающий мир (SENSE) и действовать (ACT), но при этом не имеет никакой модели окружающего мира, можно отнести к автоматизации. Широко распространенный пример такого устройства — кофейный автомат.
Исходя из данного определения, правильнее всего называть современную, передовую робототехнику интеллектуальной.
КЛАССИФИКАЦИЯ РОБОТОВ
Существует также принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
1. промышленная робототехника;
2. сервисная робототехника.
Промышленный робот — это автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем и более осям. Он может быть либо зафиксирован в заданном месте, либо может иметь возможность передвижения для выполнения промышленных задач по автоматизации.
Если немного упростить терминологию, то промышленная робототехника — это все, что находится в производственном цеху; главным образом это различные манипуляторы. На сегодняшний день это самый распространенный вид роботов — всего в мире установлено почти два миллиона промышленных роботов.
Роботы, работающие в цилиндрической системе координат
Прочие
Сервисный робот — это робот, выполняющий полезную работу для людей и оборудования, исключая промышленные задачи по автоматизации.
Аналогично, немного упрощая ситуацию, мы можем сказать, что сервисная робототехника — это все, что находится за пределами производственного цеха.
Классификация сервисных роботов основана на данном в стандарте определении, но существенно доработана Международной федерацией робототехники (International Federation of Robotics — IFR), консалтинговым агентством, которое является крупнейшим и наиболее авторитетным источником информации об отрасли.
В соответствии с этой классификацией сервисная робототехника делится на два типа:
1. для персонального использования. Это те роботы, которых мы приобретаем для использования в нашей повседневной жизни;
2. для профессионального использования. Это роботы, которые приобретаются для того, чтобы использовать их с целью извлечения выгоды при оказании различных услуг.
Подводные системы (общего/гражданского назначения)
Силовые экзоскелеты
Мобильные платформы (общего назначения)
Роботы для продвижения услуг (PR) и развлечения
Другие профессиональные роботы различного назначения
Как можно видеть на рисунке 3, существует множество видов сервисных роботов. Некоторые из них очень популярны и находятся в очень хорошей степени технологической зрелости, а некоторые существуют в единичном экземпляре: в мире миллионы роботов-пылесосов и лишь один действующий робот-планетоход (Марсоход Curiosity является роботом, согласно IFR).
Ссылки:
ISO/TC 299 Robotics — ISO 8373:2012 Robots and robotic devices — Vocabulary, 2012 https://www.iso.org/standard/55890.html
International Federation of Robotics — “Industrial Robots — Definition and Types”, 2016 https://ifr.org/img/office/Service_Robots_2016_Chapter_1_2.pdf
С полным текстом Аналитического обзора мирового рынка робототехники можно ознакомиться на сайте Сбербанка по ссылке.
Международная федерация робототехники
Определение
Использование IFR термина « промышленный робот » основано на определении Международной организации по стандартизации: « автоматически управляемый, перепрограммируемый многоцелевой манипулятор, программируемый по трем или более осям ”, который может быть закреплен на месте или передвижен для использования в приложениях промышленной автоматизации. (ISO 8373)
Термины, используемые в определении, означают:
Перепрограммируемый : разработан таким образом, что запрограммированные движения или вспомогательные функции могут быть изменены без физических изменений;
Многоцелевой : может быть адаптирован к другому применению путем физического изменения;
Физическое изменение : изменение механической системы (механическая система не включает носители данных, ПЗУ и т. д.)
Ось : направление, используемое для указания движения робота в линейном или вращательном режиме
Промышленные роботы могут быть классифицированы в соответствии с механической структурой:
Декартовский робот : робот, рука которого имеет три призматических шарнира и оси которого связаны с декартовой системой координат
Робот SCARA : робот с двумя параллельными поворотными шарнирами для обеспечения соответствия в плоскости
Шарнирный робот : робот, рука которого имеет не менее трех вращающихся шарниров
Параллельный/дельта-робот : робот, руки которого имеют параллельные призматические или поворотные шарниры
Цилиндрический робот : робот, оси которого образуют цилиндрическую систему координат
Узнайте больше о различных типах роботов в файле ниже.
Статистический отдел IFR собирает статистические данные о ежегодных установках многоцелевых промышленных роботов примерно в 40 странах с разбивкой по областям применения, отраслям-заказчикам, типам роботов и другим техническим и экономические аспекты.
World Robotics — Industrial Robots предоставляет глобальную статистику по промышленным роботам в стандартизированных таблицах и позволяет проводить национальные сравнения. Данные о производстве, экспорте и импорте указаны для выбранных стран. Он также предлагает плотность роботов, то есть количество роботов на 10 000 сотрудников, в качестве меры степени автоматизации.
Резюме доступно для бесплатной загрузки. Полный отчет доступен для покупки в разделе World Robotics.
Значительно улучшенные характеристики роботизированных систем и повышенная простота использования открывают новые решения для автоматизации, многие из которых выходят за рамки «классических» приложений промышленных роботов. Кроме того, производители роботов и системные интеграторы все чаще поставляют гибкие рабочие ячейки со стандартной конфигурацией, которые можно быстро интегрировать в существующие производственные системы для стандартных приложений.
Это означает, что даже мелкосерийное производство может быть эффективно автоматизировано в таких областях, как сварка и резка деталей, гибкая сборка и упаковка, а также укладка на поддоны. Инвестиции в роботов становятся все более прибыльными и, следовательно, получают все большее распространение в промышленности.
Примеры использования промышленных роботов можно найти здесь.
Основные преимущества инвестиций в роботов
Причины, по которым компании рассматривают возможность инвестирования в робототехнические системы, сильно различаются. Некоторые факторы включают положительное влияние на качество деталей, повышение производительности производства (более быстрое время цикла) и/или доходность (меньше брака), повышение безопасности рабочих, сокращение незавершенного производства, большую гибкость производственного процесса и снижение затрат. .
Основные причины для инвестиций в промышленных роботов:
Повышенная гибкость для быстрой адаптации производства и реагирования на изменения спроса и меньшие размеры партий
Повышенная устойчивость к пикам производства и системным потрясениям, таким как COVID-19
Эффективность использования энергии и ресурсов за счет оптимизированной производительности (снижение энергопотребления, отходов материалов и увеличение выхода продукции)
Повышение производительности и поддержка производственных работников (Повышение качества работы сотрудников, соблюдение правил охраны труда и техники безопасности)
Снижение операционных или капитальных затрат
Повышение качества продукции
Увеличение объемов производства
Экономия места в крупных производственных помещениях
В целом, роботы повышают производительность и конкурентоспособность. При эффективном использовании они позволяют компаниям стать или оставаться конкурентоспособными. Это особенно важно для предприятий малого и среднего бизнеса (МСП), которые составляют основу экономики как развитых, так и развивающихся стран. Это также позволяет крупным компаниям повысить свою конкурентоспособность за счет более быстрой разработки и поставки продукции. Более широкое использование роботов также позволяет компаниям в странах с высокими издержками «перебазировать» или возвращать на свои внутренние базовые части цепочки поставок, которые они ранее передавали на аутсорсинг источникам более дешевой рабочей силы.
Коллаборативные роботы
Коллаборативные промышленные роботы предназначены для выполнения задач совместно с рабочими в промышленных секторах. Международная федерация робототехники определяет два типа роботов, предназначенных для совместного использования. Одна группа охватывает роботов, предназначенных для совместного использования, которые соответствуют норме 10218-1 Международной организации по стандартизации, в которой указаны требования и рекомендации в отношении конструкции, обеспечивающей безопасность, защитных мер и информации по использованию промышленных роботов. Другая группа охватывает роботов, предназначенных для совместного использования, которые не удовлетворяют требованиям ISO 10218-1. Это не означает, что эти роботы небезопасны. Они могут соответствовать различным стандартам безопасности, например, национальным или внутренним стандартам.
Существуют значительные различия в типах коллаборативных роботов, отвечающих вышеуказанным спецификациям, и уровне контакта между роботом и работником в коллаборативных приложениях. На одном конце технического спектра находятся традиционные промышленные роботы, работающие в отдельном рабочем пространстве, в которое рабочие могут периодически входить, не отключая питание робота и заранее не защищая производственную ячейку — трудоемкая процедура, которая может стоить тысячи долларов в минуту. простоя машины. Рабочее пространство робота может быть оснащено датчиками, которые обнаруживают движение человека и обеспечивают работу робота на очень низкой скорости или остановку, когда работник находится в пределах отведенного рабочего пространства. На другом конце спектра находятся промышленные роботы, специально предназначенные для совместной работы с людьми в общем рабочем пространстве. Часто называемые «коботами», эти роботы имеют множество технических характеристик, которые гарантируют, что они не причинят вреда, когда рабочий вступает в прямой контакт, преднамеренно или случайно. Эти функции включают в себя легкие материалы, закругленные контуры, набивку, «кожу» (набивку со встроенными датчиками) и датчики на основании или суставах робота, которые измеряют и контролируют силу и скорость и гарантируют, что они не превышают определенные пороговые значения в случае контакта.
Типы сотрудничества человека и промышленных роботов
Рынок для совместных роботов все еще находится в зачаточном состоянии. Конечные пользователи и системные интеграторы все еще набираются опыта в отношении того, что работает, а что нет при разработке и реализации приложений для совместной работы. Технологические разработки в области датчиков и захватов обещают расширить диапазон действий, которые может выполнять исполнительный орган робота. Интерфейсы программирования будут становиться все более интуитивно понятными не только для коботов, но и для традиционных промышленных роботов.
В 2019 году около 4,8% (18 000 из более чем 373 000) установленных промышленных роботов были коботами, что на 11% больше, чем в 2018 году.
к позиционному документу IFR по Демистификация коллаборативных роботов и кейс-стади.
Роботы и ИИ
Искусственный интеллект в роботах дает компаниям новые возможности повысить производительность, сделать работу более безопасной и сэкономить ценное время людей. Существенные исследования посвящены использованию ИИ для расширения функциональности роботов. Коммерчески доступные приложения включают использование ИИ для:
Позволяет роботам ощущать окружающую среду и реагировать на нее: это значительно расширяет спектр функций, которые могут выполнять роботы.
Оптимизируйте производительность роботов и процессов, экономя деньги компаний.
Позволяет роботам функционировать в качестве мобильных интерактивных информационных систем в самых разных условиях, от общественных мест до больниц и торговых точек, экономя время людей.
Для получения дополнительной информации см. информационный бюллетень IFR для СМИ по теме «Искусственный интеллект в робототехнике» .
Интеллектуальные подключенные роботы преобразуют производство
IFR определила пять распространенных сценариев, в которых роботы подключаются в рамках более широких стратегий автоматизации:
Автоматизированное производство: Последующие процессы, такие как заказ деталей и составление расписания машин, позволяют производителям сразу понять, какие ресурсы необходимы для производства нового продукта или заказа, и лучше оптимизировать организацию производства.
Оптимизация производительности: Подключение роботов и других машин к центральному вычислительному серверу позволяет производителям извлекать и агрегировать данные, которые можно использовать для оптимизации производительности машин в режиме реального времени или ретроспективно, избегая незапланированных простоев машин, которые могут стоить производителям более 1 миллиона долларов. в час.
Цифровые двойники: Виртуальные представления роботов и других производственных машин позволяют производителям моделировать операции и влияние изменений параметров и программ до их внедрения, что позволяет улучшить планирование производства и избежать дорогостоящих простоев.
Роботы как услуга: Внедрение роботов на основе оплаты по мере использования может быть особенно выгодно для малых и средних производителей, избавляя их от первоначальных капиталовложений и непредсказуемых затрат на техническое обслуживание, а также обеспечивая предсказуемость их работы. расходы.
Sense and Respond: Датчики и системы технического зрения позволяют роботам реагировать на внешнюю среду в режиме реального времени, расширяя спектр задач, которые может выполнять робот, например, сбор и размещение несортированных деталей, а также повышая мобильность робота. Мобильные роботы играют ключевую роль в обеспечении гибкого производства, в котором производство разделено на отдельные процессы и производственные ячейки, работающие параллельно.
Что такое промышленная автоматизация и робототехника?
Промышленная автоматизация и робототехника — это использование компьютеров, систем управления и информационных технологий для управления промышленными процессами и машинами, заменяющих ручной труд и повышающих эффективность, скорость, качество и производительность.
Автоматизированные промышленные приложения варьируются от сборочных линий производственных процессов до хирургии и космических исследований. Ранние автоматизированные системы были ориентированы на повышение производительности (поскольку этим системам не нужно отдыхать, как людям), но теперь этот акцент смещается на повышение качества и гибкости производства и многое другое. Современные автоматизированные системы выходят за рамки механизации с добавлением искусственного и машинного обучения.
Однако автоматизация и робототехника — это не одно и то же:
Автоматизация — это использование компьютерного программного обеспечения, машин или других технологий для выполнения задач, которые в противном случае выполнял бы человек. Существует несколько видов автоматизации, которые могут включать в себя как виртуальные, так и физические задачи.
1. Программная автоматизация
Это автоматизация задач, обычно выполняемых людьми с помощью компьютерных программ. Эта область включает в себя автоматизацию бизнес-процессов (BPA) с использованием программного обеспечения для формализации и оптимизации бизнес-процессов, роботизированную автоматизацию процессов (RPA), которая использует «программных роботов» для имитации людей, использующих компьютерные программы, и интеллектуальную автоматизацию процессов (IPA), которая включает в себя использование искусственного интеллекта, чтобы узнать, как люди выполняют задачи с помощью компьютерной программы. Разница между BPA и RPA невелика: BPA похож на замену человеческой производственной линии автономной фабрикой, а RPA — на добавление робота для совместной работы, который будет работать вместе с существующей рабочей силой.
2. Промышленная автоматизация
Это управление физическими процессами с помощью машин и систем управления для автоматизации производственных процессов. В этом типе физической автоматизации используются роботы, а также другие нероботизированные машины, такие как станки с ЧПУ.
Эта область инженерии использует несколько дисциплин для проектирования, создания, программирования и использования роботов. Роботы — это программируемые машины, которые используют датчики и приводы для взаимодействия с физическим миром и выполнения действий автономно или полуавтономно. Поскольку их можно перепрограммировать, роботы более гибкие, чем однофункциональные машины. Коллаборативные роботы предназначены для выполнения задач так же, как люди, в то время как традиционные промышленные роботы, как правило, выполняют задачи более эффективно, чем люди.
У автоматизации и робототехники есть области, в которых они пересекаются, например, использование роботов для автоматизации физических задач, например, на линиях сборки автомобилей. Однако не вся автоматизация использует физических роботов и не все области робототехники связаны с автоматизацией.
Ранней формой промышленной автоматизации было использование станков с числовым программным управлением (ЧПУ) для высокоточного аэрокосмического производства в Соединенных Штатах во время Второй мировой войны. Используя первые промышленные вычислительные системы, первые станки с ЧПУ все еще требовали высокого уровня человеческого участия, пока они не стали более автоматизированными в 19 веке.50-е годы.
Современная промышленная автоматизация включает использование систем сбора данных, распределенных систем управления, диспетчерского управления и программируемых логистических контроллеров. Они постоянны и предсказуемы, что делает их идеальными для обработки химикатов, целлюлозы, бумаги, нефти и газа или другого сырья. Добавляя к этим системам возможности Индустрии 4.0, промышленная автоматизация также может включать доступ к периферийным данным для дальнейшей оптимизации операций на основе данных в реальном времени.
Рост промышленной автоматизации и робототехники пришелся на 19Механизированная промышленность -го века -го века, в которой люди должны были управлять все более сложным оборудованием для обеспечения более высокой производительности. По мере развития механизации операторы машин становились все более второстепенными в работе, и это понятие получило дальнейшее развитие с промышленной автоматизацией.
Промышленная автоматизация требовала еще меньшего участия человека для выполнения основных и повторяющихся задач, что привело к сокращению некоторых рабочих мест, но также создало новые возможности, связанные с самой автоматизацией. Это сместило роли в сторону экономики белых воротничков, поскольку такие страны, как Япония, достигли высоко роботизированного производства электроники и автомобилей к 1919 году. 80-е годы.
Этот параллельный рост промышленной автоматизации и робототехники продолжился с появлением искусственного интеллекта, машинного обучения и роботизированного зрения. Сегодня можно автоматизировать не только производство, но и программирование и организацию процессов, что позволяет людям сосредоточиться на добавлении ценности за счет улучшения конструкции продукта.
Роботы могут использоваться в физической промышленной автоматизации, но не требуются для виртуальных задач и программных приложений.
Промышленная автоматизация, с роботами или без них, предлагает ряд преимуществ:
1. Снижение эксплуатационных расходов
Отсутствие необходимости в медицинском обслуживании, оплачиваемом отпуске, пенсионных выплатах или других пособиях персоналу и без выплаты заработной платы промышленная автоматизация, как правило, дешевле, чем нанимать людей. Хотя могут быть затраты на техническое обслуживание, при правильном управлении они должны быть намного меньше, чем затраты на персонал для того же результата или лучше.
2. Повышенная производительность
Промышленная автоматизация позволяет предприятиям работать 24 часа в сутки, 7 дней в неделю без потери времени на передачу персонала или отпуск, повышая производительность предприятия.
3. Улучшенное качество
Промышленная автоматизация отличается высокой повторяемостью без ошибок, связанных с человеческим персоналом. Техника также не будет уставать, что может повлиять на качество и производительность в определенное время смены.
4. Высокая гибкость
Автоматизированная система, включая роботов, может быть запрограммирована на выполнение другой задачи, обеспечивая большую гибкость, чем люди, которым может потребоваться обучение для выполнения другой задачи.
5. Повышение точности и сбора данных
Автоматизированный сбор данных не только более надежен, но и позволяет повысить точность данных, предоставляя необходимые факты для принятия решений по сокращению отходов и улучшению процессов.
6. Повышенная безопасность
Использование роботов для опасных ролей или условий повысит безопасность на вашем предприятии по сравнению с использованием сотрудников-людей.
Промышленная автоматизация позволяет выполнять больше работы, дешевле и эффективнее, чем с людьми. Это также означает, что вам не нужно искать квалифицированную рабочую силу там, где вместо нее можно было бы использовать робота.
Основным недостатком промышленной автоматизации являются высокие затраты, связанные с переключением с человека на автоматическую производственную линию. Существуют также последующие расходы, связанные с переподготовкой или наймом персонала для работы со сложным оборудованием.
Услуги, связанные с промышленной автоматизацией и робототехникой, уже оцениваются в миллиарды долларов в год и будут расти по мере развития технологий.
Поскольку производство роботов увеличилось, связанные с этим затраты снизились, и эта тенденция должна сохраниться, поскольку все больше стран с развивающейся экономикой начинают рассматривать робототехнику как решение. В результате увеличения производства роботов также увеличилась доступность необходимых навыков для их проектирования, установки, эксплуатации и обслуживания. Кроме того, повышенная доступность программного обеспечения сократила связанные с этим время и риски проектирования, в то же время сделав программирование роботов намного проще и дешевле.
Поскольку технологии продолжают развиваться, эти тенденции должны сохраниться и в будущем с роботизированными системами, способными собирать данные, отслеживать процессы и устранять любые проблемы. Роботы уже могут использовать датчики и другие точки данных для мониторинга и адаптации своих движений в режиме реального времени, имитируя навыки человека-ремесленника для улучшения процесса и снижения требований к доработке или проверке.
Хотя роботы по-прежнему будут использоваться для автоматизации повторяющихся физических задач, новые технологии могут позволить роботам реагировать на голосовые команды, поскольку искусственный интеллект позволяет им справляться с более широким кругом задач и адаптироваться к изменениям в рабочей среде. Это приведет к тому, что роботы будут использоваться в таких областях, как сельское хозяйство, где автоматизированным системам сложно найти, оценить и собрать урожай. Роботизированная точность — еще одна область, в которой в будущем должны быть достигнуты успехи, поскольку она позволяет выполнять более сложные задачи с улучшенной координацией.
По мере развития роботов можно будет решать, какие задачи должны быть автоматизированы, а какие должны выполняться людьми, а благодаря передовым системам безопасности роботы также будут чаще использоваться для работы вместе с людьми, не подвергая их потенциальной опасности.
В настоящее время автоматизированные системы совершенствуются, чтобы иметь возможность контролировать и автоматически регулировать скорость целых производственных линий, чтобы максимизировать производительность и минимизировать затраты.
Со всеми этими достижениями стратегия автоматизации будет зависеть от успешного решения, какие области автоматизировать и на каком уровне.
Что такое промышленная автоматизация?
Промышленная автоматизация — это использование информационных технологий и систем управления, таких как компьютеры и роботы, для управления машинами и физическими или виртуальными процессами вместо того, чтобы полагаться на людей. Промышленная автоматизация — это шаг вперед по сравнению с механизацией как частью производственных процессов.
Что означает промышленная робототехника?
Промышленная робототехника — это использование робота для производства или других промышленных процессов, включая сборку, упаковку, маркировку, покраску, проверку, испытания, сварку и т. д. Использование роботов для этих задач должно обеспечивать высокую выносливость, точность и скорость выполнения задач.
В чем разница между робототехникой и автоматизацией?
Хотя иногда они взаимозаменяемы, робототехника и автоматизация — разные вещи. Автоматизация — это процесс использования технологий для выполнения задач, которые в противном случае выполнялись бы людьми. Эти задачи могут быть как физическими, так и виртуальными, и для их выполнения могут использоваться роботы. Робототехника — это процесс разработки и использования роботов (конкретно) для определенной функции, которая может или не может быть автоматизирована.
Хотя промышленная автоматизация и робототехника не одно и то же, они часто идут рука об руку для повышения производительности, качества и безопасности при низких затратах в различных отраслях промышленности.
Использование автоматизированной робототехники в таких приложениях, как производственные линии и прецизионная хирургия, продолжает развиваться вместе с ростом возможностей подключения к Интернету вещей (IoT), поскольку все больше предприятий изучают преимущества Индустрии 4.0.
Однако, как роботы не нуждаются в автоматизации, так и промышленная автоматизация зависит не только от физических роботов. Промышленная автоматизация охватывает любой аспект операции, который может быть выполнен машиной, а не человеком, а это означает, что в автоматизации также есть много виртуальных аспектов.
Производитель компрессорной и газоразделительной техники
Каталог
Ресиверы
Производим воздухосборники 900 л
Воздухосборники
Онлайн заявка
Презентация в формате PDF
Подбор оборудования
28. 04.2022
Получены сертификаты «ИНТЕРГАЗСЕРТ»
16.09.2022
Приняли участие в XI Петербургском международном газовом форуме (ПМГФ-2022)
23.09.2022
Поздравляем коллег с профессиональным праздником
05.09.2022
С Днем работников нефтяной и газовой промышленности
Российский производитель компрессорной и газоразделительной техники. С 2005 года наше предприятие специализируется на изготовлении и комплексных поставках компрессорных и газоразделительных станций, а также предоставлении услуг по шефмонтажу, пуско-наладке, ремонту и сервисному обслуживанию.
Основными направлениями нашей деятельности являются газоразделительные станции, компрессорные станции на основе винтовых, поршневых и роторно-пластинчатых компрессоров, а также компрессорные станции комбинированного типа.
Предприятие полного цикла с собственной производственной площадкой, конструкторским отделом и отделом технического контроля. Вся продукция производится в соответствии с нормами сертификата качества ИСО 9001:2015 без привлечения подрядных организаций.
Ознакомиться с полным списком технологических возможностей производства — по ссылке
В короткие сроки изготовим:
Осушители адсорбционные (АО) холодной и горячей регенерации
Сосуды для приема, хранения и выдачи газообразных сред (К)
Аппараты воздушного охлаждения (АВО)
Установки газоразделительные (PRONITRON A) мембранные и адсорбционные
Аппараты очистки газа (АОГ) вертикальные
Трехфазные сепараторы
Светодиодное оборудование
Технологические трубопроводы
Металлические/строительные конструкции
Блок-боксы
Емкостное оборудование (ресиверы, маслоотделители)
Фильтры жидкости, газовые, магистральные
Часть оборудования в наличии на складе. Спрашивайте!
+7 (351) 2-777-566
Блочно-модульные станции очистки воды
Блочно-модульные станции используют для очистки и обеззараживания воды, поступающей из подземных и поверхностных источников.
Газовые и воздушные компрессорные установки
Газовые и воздушные компрессорные установки являются одними из наиболее востребованных видов современного оборудования. Компрессоры находят применение практически во всех отраслях промышленности.
Запчасти для компрессоров
Компрессор – важный механизм, необходимый для полноценной работы прибора. Чаще всего изнашиваются и требуют замены детали и запчасти.
Влагомаслоотделитель
Поступающие во время работы в компрессор пары масла или воды негативно влияют на все работающие механизмы.
Конденсатоотводчик
При подготовке воздуха всегда появляется и скапливается конденсат. В результате того, что пар частично остывает в трубопроводе, а потом отдает тепло в теплообменнике и образуется конденсат.
Компрессорная станция
Компрессорная станция – это комплект оборудования, предназначенный для компримирования газов.
Винтовой и поршневой компрессоры: сравнительные характеристики
Винтовой компрессор был запатентован в 1934 году. С этого момента в целях обеспечения предприятий сжатым воздухом специалисты стали делать выбор между винтовой и поршневой системами.
Монтаж компрессора в помещении
Монтаж компрессора на заводе, производстве или цехе требует соблюдения правил безопасности. Необходимо знать назначение машины, чтобы обеспечить ее стабильное функционирование.
Воздушный компрессор: как выбрать
Компрессор необходим для проведения работ, требующих на выходе подачи сжатого воздуха. Не важно, идет речь об автосервисе, строительстве, медицине или хобби.
Получение азота в промышленности
Азот не добывают из земных недр или океанских глубин. Его получают непосредственно из атмосферы, которая примерно на 78% состоит именно из этого вещества.
Как выбрать безмасляный компрессор
Существуют компрессоры различного типа. Также они представлены множеством брендов. Поэтому выбор безмасляной установки может вызвать ряд затруднений.
Способы очистки сжатого воздуха от масла
Многие предприятия применяют сжатый воздух как энергоноситель, то есть используют компрессоры.
Применение безмасляных компрессоров
Компрессоры применяются на любом современном предприятии. Сжатый воздух необходим при различных технологических процессах.
Устройство компрессорных установок
Компрессорная установка представляет собой совокупность устройств, которые устанавливаются единично или группами и снабжаются вспомогательным оборудованием и приборами, необходимыми для их нормальной эксплуатации.
Преимущества адсорбционной технологии получения азота (КЦА) по сравнению с мембранной технологией
Почему адсорбционные генераторы азота лучшее решение?
1.
Работаем с девизом: «КАЧЕСТВО — ПРЕВЫШЕ ВСЕГО»
2.
Разработка оборудования для специфических задач в сжатые сроки
3.
Имеем собственную аккредитованную лабораторию неразрушающего контроля
4.
Вся продукция и комплектующие имеют все необходимые сертификаты и разрешительную документацию
5.
Быстрая адаптация к изменяющимся реалиям в отрасли
6.
Оперативный выезд специалистов по обслуживанию
7.
Оказание бухгалтерских, технических и юридических консультаций
8.
Реализована активная программа импортозамещения
9.
Подбор схем оплаты и отгрузки в индивидуальном порядке
10.
Соответствие всей продукции современным техническим стандартам
Наши клиенты
Как с нами связаться?
Для покупки промышленного оборудования в Челябинске вы можете обратиться к нашим специалистам, которые проведут консультацию и подберут нужную модель. Кроме продажи компрессоров мы занимаемся сервисным обслуживанием агрегатов. На официальном сайте ООО «Завод Промышленного Оборудования» в Челябинске указаны телефоны для получения нужной вам информации или для совершения заказа. Мы гарантируем, что вы получите отличный результат по разумной цене!
Задать вопрос
ООО “Промышленное Оборудование и Системы Контроля”
Производители:
614107, Россия, г. Пермь, ул. Хрустальная 8а; тел./факс.: (342) 207-49-59
О компании
ООО «Промышленное Оборудование и Системы Контроля», сокращенное название ООО «ПОИСК» создано в 2015 г. в процессе реорганизации в форме преобразования ЗАО «Промышленное Оборудование и Системы Контроля» , сокращенное название ЗАО «ПОИСК», основанного в 2004 году.
Основное направление деятельности — поставки оборудования для систем тепло-, водо- и газоснабжения, а также для управления и автоматизации производственных процессов в различных отраслях промышленности.
Оборудование: ООО «ПОИСК» является официальным дистрибьютором компаний АДЛ, ВИКА МЕРА, курского завода КЭАЗ и ООО «Ольвия», и представляет на российском рынке широкий спектр высококачественной трубопроводной арматуры, парового оборудования, насосного оборудования, электрооборудования для защиты и управления электродвигателями, низковольтное электрооборудование, оборудования КИПиА.
Сфера применения: Данная продукция успешно применяется в секторе жилищно-коммунального хозяйства, при строительстве как гражданских, так и промышленных объектов, в химической, нефтехимической, металлургической, целлюлозно-бумажной, пищевой и других отраслях промышленности.
Реквизиты
Полное наименование: Общество с ограниченной ответственностью “Промышленное Оборудование и Системы Контроля” Сокращенное наименование: ООО «ПОИСК»
Карточка предприятия
Генеральный директор Голдобин Александр Валерьевич, на основании Устава
Главный бухгалтер Торсунова Наталья Александровна
Исполнительный директор Бурмасов Евгений Сергеевич на основании Доверенности 01/2021 от 19.02.2021 г.
ИНН/КПП 5906077770/590601001 ОГРН 1155958011142 Юридический адрес 614107, г. Пермь, ул. Хрустальная 8а Фактический адрес 614107, г. Пермь, ул. Хрустальная 8а ОКПО 72188937 ОКВЭД 51.70, 51.61.3, 51.61.2, 51.61.1, 51.61, 51.62, 51.63,51.64.3, 51.64.2, 51.64.1, 51.64, 51.65.6, 51.65.5, 51.65.4, 51.65.3, 51.65.2, 51.65.1, 51.65, 51.66.2, 51.66.1, 51.66, 74.20.14
ОКОПФ 12300 ОКФС 16 ОКАТО 57401375000 ОКТМО 57701000001 ОКОГУ 4210014 р/с 40702810869820000031 БИК 046577795 к/с 30101810900000000795 Банк ПАО КБ «УБРиР» г. Екатеринбург Телефон/факс (342)207-49-59 (многоканальный) E-mail Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. Сайт poiskperm.ru
Дилерский договор с ООО «Ольвия»
Новая линейка манометров
Доступен новый интерфейс IO-Link V1. 1. для переключателей WIKA
Новости промышленного оборудования
Роботизированные насесты для птиц на уступе в инженерном деле First
Никогда прежде орнитоптер не мог приземляться так, как настоящая птица.
Сбои в подаче электроэнергии усиливают призывы к коммунальным службам переосмыслить газ
В какой-то момент во время арктического взрыва зависло важное оборудование.
2 января 2023 г.
Tesla продала рекордные 1,3 миллиона автомобилей в прошлом году
Это было всего лишь меньше 1,4 миллиона, необходимых для достижения компанией цели роста на 50%.
2 января 2023 г.
Faction представляет беспилотные автомобили для доставки в Сан-Франциско
Автопарк компании сочетает автономию с удаленным дистанционным управлением людьми для осуществления доставки.
27 декабря 2022 г.
VW отзывает Beetles для замены подушек безопасности Takata
Компания отзывает почти 42 000 автомобилей.
31 декабря 2022 г.
Китайское производство ослабевает из-за вспышки COVID-19
Производственный сектор страны сокращается третий месяц подряд.
31 декабря 2022 г.
Компании урегулируют схему уклонения от уплаты таможенных пошлин
3 января 2023 г.
Гигантские взрывы в аквариуме; Промышленность пластмасс под угрозой; Атаки Смакера Самозванец | Сегодня в Производство Ep. 99
26 декабря 2022 г.
12 рождественских фильмов (с производственным ракурсом)
17 декабря 2021 г.
Дни газовых транспортных средств сочтены вдоль западного побережья
22 декабря 2022 г.
5 9 Сегодня в Производство Pocast0003
Сегодня в Производстве есть новый подкаст, подготовленный для вас редакторами Industrial Media. В каждом эпизоде мы обсуждаем пять самых больших историй в производстве и то, как они влияют на развитие отрасли.
21 ноября 2022 г.
Кондиционеры воздуха в сверхтонком корпусе, идеально подходящие для установки на двери
Блоки переменного тока серии Access имеют тонкий профиль толщиной 5 дюймов.
3 января 2023 г.
Oshkosh Lands $102M JLTV Order
Международные партнеры продолжают использовать мобильность, защиту, надежность и совместимость JLTV.
3 января 2023 г.
Инструмент распознавания лиц привел к ошибочному аресту, говорит адвокат
Критики говорят, что технология приводит к более высокому уровню ошибочной идентификации цветных людей.
3 января 2023 г.
Успехи дронов в Украине могут привести к появлению роботов-убийц
Чем дольше длится война, тем больше вероятность того, что дроны будут использоваться для идентификации, выбора и атаки целей без помощи человека.
3 января 2023 г.
Необъявленный запуск ракеты вызывает панику в связи с НЛО
Военные не уведомили общественность о запуске, потому что это касалось важных вопросов военной безопасности.
31 декабря 2022 г.
Летние дноуглубительные работы в канале угрожают черепахам, говорится в судебном иске
Инженерный корпус армии хочет отменить давние сезонные ограничения.
30 декабря 2022 г.
Rolls-Royce готов к испытаниям массивного реактивного двигателя
Демонстрационный образец UltraFan имеет вентилятор диаметром 140 дюймов и обеспечивает повышение эффективности использования топлива на 25% по сравнению с двигателем Trent первого поколения.
30 декабря 2022 г.
ZeroAvia получает разрешение на следующую фазу водородно-электрических испытательных полетов
19-местный двухмоторный самолет был модернизирован в конфигурации инженерного испытательного стенда.
29 декабря 2022 г.
Ключевые тенденции, которые следует помнить на 2023 г.
Рост процентных ставок, нехватка квалифицированной рабочей силы и нерешенные проблемы с цепочками поставок коснутся всех, но не более, чем неподготовленных.
29 декабря 2022 г.
5 лучших критериев выбора ERP
Помимо функциональности заинтересованные стороны должны учитывать другие важные аспекты ERP.
29 декабря 2022 г.
Дрон XAG поддерживает панамских фермеров, которые переключают внимание на экономичное устойчивое развитие
Интерес к XAG P100 проявляют средние и крупные фермы.
28 декабря 2022 г.
Модернизация ядра двигателя F135 получила еще 75 миллионов долларов от Omnibus Bill
Модернизация просрочена и будет стоить на миллиарды меньше, чем новый двигатель.
28 декабря 2022 г.
Наручные часы помогают пациентам с посттравматическим стрессовым расстройством проходить курс лечения
Bio Ware разработан для усиления эффекта терапии длительного воздействия, распространенной доказательной терапии для пациентов с посттравматическим стрессовым расстройством.
28 декабря 2022 г.
Финляндия получает плавучий СПГ-терминал взамен российского газа
Он рассчитан на 68 000 тонн СПГ и будет введен в эксплуатацию в начале 2023 г.
28 декабря 2022 г.
Промышленное оборудование , расходные материалы, инструменты и товары для техобслуживания
Избранные категории
9d8=»»> Инструменты и обработка
9d8=»»>
9d8=»»> Ручной инструмент
9d8=»»> Электроинструменты и аксессуары
9d8=»»> Режущие инструменты
9d8=»»> Хранение и рабочее пространство
9d8=»»>
9d8=»»> Стеллажи и стеллажи
9d8=»»> Ящики для хранения, коробки и сумки
9d8=»»> Органайзеры для мелких деталей
9d8=»»> Электроснабжение
9d8=»»>
9d8=»»> Промышленный контроль и автоматизация
9d8=»»> Распределение питания и защита цепей
9d8=»»> Трубопровод и дорожки
9d8=»»> Территория и на открытом воздухе
9d8=»»>
9d8=»»> Газон и сад
9d8=»»> Навесы, покрытия и наружные конструкции
9d8=»»> Снегоуборочное оборудование
9d8=»»> Сантехника
9d8=»»>
9d8=»»> Трубы, клапаны и фитинги
9d8=»»> Водные нагреватели
9d8=»»> Смесители
9d8=»»> Отопление охлаждение
9d8=»»>
9d8=»»> Отопительное оборудование
9d8=»»> Вентиляция
9d8=»»> HVACR и средства управления приборами
9d8=»»> Передача энергии
9d8=»»>
9d8=»»> Компрессоры, воздушные резервуары и пневматические детали
9d8=»»> Подшипники, клиновые ремни и оборудование для передачи мощности
9d8=»»> Моторы
9d8=»»> Крепеж
9d8=»»>
9d8=»»> Винты и болты
9d8=»»> Орехи
9d8=»»> Шайбы
9d8=»»> Техническое обслуживание автомобиля
9d8=»»>
9d8=»»> Автосервис и инструменты для магазинов
9d8=»»> Автомобильные аксессуары
9d8=»»> Автомобильная электрика и освещение
9d8=»»> Уборка и чистящие средства
9d8=»»>
9d8=»»> Моющие средства
9d8=»»> Бумажные изделия и диспенсеры
9d8=»»> Чистящие химикаты
9d8=»»> Электроника
9d8=»»>
9d8=»»> Аккумуляторы и зарядные устройства
9d8=»»> Аудио
9d8=»»> Безопасность и наблюдение
9d8=»»> Безопасность
9d8=»»>
9d8=»»> Средства индивидуальной защиты (СИЗ)
9d8=»»> Безопасность объектов и рабочих площадок
9d8=»»> Знаки и этикетки
Знаменитые бренды
Посмотреть все бренды
Стэнли
Риджид
Милуоки Инструменты
Дейтон
на запад
ДЕУОЛТ
3 причины, по которым вы можете на нас рассчитывать
Обслуживание клиентов от людей, которые заботятся.
Мы знаем, что вы хотите быстрое, дружелюбное обслуживание и ответы на все ваши вопросы. Вот почему каждый раз, когда вы звоните нам, вы будете разговаривать с реальными людьми.
Узнать больше →
Популярные запросы
milwaukee
closeout
hsm securio b24
hsm securio b32
irwin
file cabinets
business essentials
950 lumens led
clorox
duct tape
полотно ленточной пилы
кроил
саморезы
огнетушители
столы
Ваш пункт назначения для промышленного оборудования и товаров для бизнеса
В магазине Zoro вы найдете миллионы товаров премиум-класса от тысяч проверенных брендов, включая инструменты, промышленное оборудование, товары для бизнеса и многое другое.
Оборудование для производства метизов и крепежа. Проекты под ключ с кредитованием.
Уважаемые коллеги!
Примите наши искренние поздравления с Рождеством и наступающим Новым Годом!
Для каждого из нас Новый Год и Рождество есть небольшое волшебство, в которое мы верим.
У каждого человека, где бы он не работал и в какой стране он бы не проживал есть своя сокровенная мечта сделать свою жизнь и жизнь своей семьи ещё ярче и счастливее. Пусть наступающий год станет для вас успешным и будет новой ступенью в развитии и росте с укреплением позиций на рынке.
Желаем вам крепкого здоровья и процветания, а также добра и благополучия вам и вашим семьям!
Rost Group & Technology Co., Ltd
Главное преимущество группы компаний ТМА — кредитование поставок оборудования на период 3-5 лет и дальнейшее гарантийное и послегарантийное обслуживание с поставкой запасных частей, химии, инструмента и оснастки. Также мы предлагаем инструмент и оснастку для холодновысадочного и накатного оборудования.
Мы предоставляем комплексные решения по техническому оснащению предприятий оборудованием для производства крепежа и метизов, которые включают в себя — предконтрактную работу, организацию кредитования, согласование технических параметров, контроль за качеством изготовления оборудования, инспекцию на заводе изготовителя с представителем заказчика, доставку до заказчика, шеф-монтаж, пуско-наладочные работы, сдачу проектов под ключ, обучение персонала заказчика, техническое обслуживание, поставку запасных частей, сменного инструмента, сырья и расходных материалов.
Наша компания имеет опыт разработки жаропрочной оснастки для печей термообработки, конвейерной ленты для проходных закалочно-отпускных агрегатов, опыт изготовления сменного (высадочного, резьбонакатного, резьбонарезного, волочильного) инструмента согласно чертежам готовых изделий различной сложности, размеров и технических требований, опыт производства инструмента и оснастки (обсечные матрицы, пуансоны, штампы и др. ) по готовым чертежам заказчика.
Оборудование для производства метизов, крепежа и деталей, произведенное на Тайване, является основой успеха многих тайванских компаний на международном рынке.
ТАЙВАНЬ МЕТИЗ АЛЬЯНС — группа лучших тайваньских компаний производителей оборудования для производства крепежа, метизов, автомобильных и специальных деталей, включая:
аэрокосмическую промышленность;
оборонно-промышленный комплекс;
судостроение;
топливно-энергетическая промышленность.
Основой группы компаний Тайвань Метиз Альянс являются компании — лидеры мирового рынка в области оборудования для производства метизов, крепежа и разных деталей. ТМА сейчас объединяет 26 передовых предприятий Тайваня по производству специального оборудования, инструмента и металла для метизной промышленности – от подготовки металла под высадку и штамповку, термической обработки, цинкования до автоматического контроля качества и упаковки готовой продукции, холодновысадочного, резьбонакатного инструмента и металла для холодной высадки для полного автоматизированного холодновысадочного производства.
Оборудование компаний ТМА используется на крупнейших заводах мира, продукция которых, поставляется для таких известных компаний как Toyota, Mersedes-Benz, Volvo, BMW, Nissan, Ford, Honda, Hyundai, Suzuki, Yamaha, компаниям аэрокосмической индустрии, а также многим другими компаниям в разных отраслях промышленности. Ярким примером может быть и компания Apple, продукция которой комплектуется метизами, сделанных полностью на тайваньском оборудовании.
Более 60% крепежа и метизной продукции в мире производится на тайваньском оборудовании.
Группа компаний Тайвань Метиз Альянс также является лидером рынка СНГ по поставкам оборудования для производства метизов, крепежа и деталей, имеет долгосрочные партнёрские связи с ведущими компаниями, производящими продукцию на рынке СНГ.
Главный офис сервисного центра Тайвань Метиз Альянс в лице Rost Group & Technology Co. Ltd находится в Тайване, г.Тайбэй. В компании работают квалифицированные специалисты со знанием русского языка.
Компания ведёт предконтрактную работу, организует финансирование, сопровождает изготовление оборудования, выполняет монтаж и сдачу проектов под ключ, производит обучение персонала, оказывает сервис в гарантийном и послегарантийном обслуживании, поставке запасных частей и сменного инструмента, также имеет большой опыт в поставке конвейерных лент для проходных закалочных печей.
ПРОЕКТЫ ПОД КЛЮЧ С РАССРОЧКОЙ ПЛАТЕЖА И КРЕДИТОВАНИЕМ 3-5 ЛЕТ
Печи для отжига проволоки
Линия травления катанки
Оборудование для удаления окалины проволоки
Дробеструйные машины для очистки проволоки
Линии волочения
Линия цинкования проволоки
Оборудование для высадки болтов, гаек и деталей
Оборудование для высадки саморезов и шурупов
Высокоскоростное оборудование для высадки гвоздей
Коллаторы для производства барабанных и реечных гвоздей для пневмопистолетов
Оборудование для высадки микрокрепежа
Высадка горячим способом больших болтов, гаек и специальных изделий
Накатка резьбы на болтах
Нарезка резьбы на гайках
Накатка резьбы на саморезах и шурупах
Формирование сверла самореза
Линии химико-термической обработки
Линии гальванического покрытия болтов, гаек, саморезов
Оборудование для сборки самореза с шайбой
Оборудование для упаковки крепежа
Оборудование для производства сварной сетки
Оборудование для навивки пружин
Оборудование для литья под давлением деталей
Оборудование для автоматического тестирования качества крепежа и разбраковки
Химия для гальванической обработки поверхности метизов, очистки воды
Инструмент для высадки метизов. Резьбонакатный инструмент.
НАШИ ПРИНЦИПЫ В РАБОТЕ
ЧЕСТНОСТЬ, ОТКРЫТОСТЬ, ДОВЕРИЕ. Мы предлагаем Вам русскоязычный сервис в работе с нами по проектам поставки оборудования для производства метизов и крепежа, специальных деталей, в том числе «заводов под ключ» с дальнейшим сервисом их обслуживания и обеспечением инструментом для их производства.
КОНСАЛТИНГ
Услуги по обследованию предприятий, разработке техзаданий, удаленные и выездные консультации
ПРОЕКТИРОВАНИЕ
Услуги по разработке ПСД как отдельно, так и в объеме выполнения работ «под ключ»
ПОСТАВКА ОБОРУДОВАНИЯ
Выполнение инженерно-проектных работ и поставка оборудования для металлообработки клиентам
МОНТАЖ И ПУСКОНАЛАДКА
Выполнение монтажных, шефмонтажных работ в объеме выполнения комплекса работ «под ключ»
СОПРОВОЖДЕНИЕ И ПОДДЕРЖКА
Гарантийное и послегарантийное обслуживание
РАЗРАБОТКА ОБЪЕКТА «ПОД КЛЮЧ»
Основным принципом деятельности нашей компании является реализация проектов «под ключ»
Почему партнеры из разных стран выбирают оборудование производства Тайваня?
В настоящее время тайванские компании, производящие метизы и крепеж, контролируют более 60% мирового рынка крепежа и метизов. На Тайване работают более 1000 таких предприятий.
Машиностроение является основной отраслью экономики Тайваня. Страна экспортирует 79% производимых станков и является ведущим экспортёром станков, метизного оборудования, сменного инструмента для производства крепежа, калиброванного металлопроката и прочей метизной продукции.
Тайвань — это лидер современной мировой метизной промышленности. Исторически сложилось, что сразу после второй мировой войны США разместили на Тайване производство крепежа для нужд своей армии. Благодаря этому, Тайвань сейчас является, во-первых, главным разработчиком и производителем оборудования для изготовления крепежа (более 60% мирового рынка крепежа и метизной продукции делается на тайваньском оборудовании), а во-вторых, главным поставщиком сложного высокотехнологичного крепежа. Что касается производства простых крепежных изделий, то оно постепенно было перенесено в материковый Китай, который Тайвань обеспечивает новейшей техникой и технологиями.
Основное направление модернизации оборудования на Тайване идет в сторону полной автоматизации с минимальным привлечением человеческих ресурсов. Если рассматривать проект завода под ключ, то вся технологическая линия оборудования работает в автоматическом режиме, с применением фотоэлектрических датчиков, контролируется промышленным компьютером, программируемым логическим контроллером, зачастую японского или германского производства. Продвижение продукции по технологической линии осуществляется конвейерами (ленточными, роликовыми).
Сейчас наиболее передовые предприятия внедряют технологию промышленных сканеров (спектограф), лазерных устройств для проверки качества готовой продукции, с возможностью интеграции в производственную линию, с возможностью вывода данных, технических параметров продукции на ПК. Сканеры дополнительно решают вопрос автоматизации.
Как оказалось фактор — цена / качество также довольно привлекателен. В этом отношении Тайвань занимает средние позиции между Европой и Японией. Что касается производства простых изделий, то оно постепенно было перенесено в материковый Китай, который Тайвань обеспечивает новейшей техникой и технологиями. В этом отношении Тайвань является очень хорошей платформой для модернизации отечественных производственных мощностей.
Мы предоставляем комплексные решения по техническому оснащению предприятий оборудованием для производства крепежа и метизов, которые включают в себя — предконтрактную работу, организацию кредитования, согласование технических параметров, контроль за качеством изготовления оборудования, инспекцию на заводе изготовителя с представителем заказчика, доставку до заказчика, шеф-монтаж, пуско-наладочные работы, сдачу проектов под ключ, обучение персонала заказчика, техническое обслуживание, поставку запасных частей, сменного инструмента, сырья и расходных материалов.
Наша компания имеет опыт разработки жаропрочной оснастки для печей термообработки, конвейерной ленты для проходных закалочно-отпускных агрегатов, опыт изготовления сменного (высадочного, резьбонакатного, резьбонарезного, волочильного) инструмента согласно чертежам готовых изделий различной сложности, размеров и технических требований, опыт производства инструмента и оснастки (обсечные матрицы, пуансоны, штампы и др. ) по готовым чертежам заказчика.
ГЕОГРАФИЯ ПОСТАВОК ОБОРУДОВАНИЯ
География поставок оборудования Тайвань Метиз Альянс для производства метизов, крепежа и деталей включает следующие страны и регионы:
ЕВРОПА
Германия, Италия, Бельгия, Франция, Англия, Россия, Беларусь, Украина, Испания, Польша
Иран, Турция, Алжир, Объединенные Арабские Эмираты, Южно-Африканская Республика
АМЕРИКА
США, Канада, Аргентина, Чили, Бразилия, Мексика
ЛОГИСТИКА И ДОСТАВКА ГРУЗОВ
Нам удалось создать прочную и гибкую инфраструктуру логистики, которая позволяет удовлетворять потребности наших клиентов в области безопасности продукции, условий поставок и эффективности затрат.
Наши партнеры сертифицированы должным образом и в полном объёме соответствуют нормативно-правовым актам и процедурам, установленными государством.
Они являются крупными компаниями в сфере логистики и способны доставлять груз в короткие сроки в любую точку мира.
Производство интерактивного сенсорного оборудования — BM Group
Мы создаём умные устройства для всех сфер
Популярное оборудование
Интерактивные столы
Интерактивные трибуны
Интерактивные панели
Терминалы самообслуживания
Сенсорные киоски
Всё наше оборудование
Закажите онлайн экскурсию по заводу или посетите шоурум в режиме видеоконференции!
Более 50 готовых отраслевых решений
Интерактивная навигация
Доступная среда
Для образовательных учреждений
Аппаратные комплексы для предотвращения эпидемий
Для сбора пожертвований
Для детских садов
Для ритейла
Смотрите всё
Лидер рынка по производству интерактивного оборудования
5000 квадратных метров производственных площадей
Полная техническая поддержка 24/7 и обслуживание
6000 реализованных проектов по всей России
Программное
обеспечение
Программная оболочка AURA
Оболочка BM AURA предназначена для комфортного использования интерактивного устройства. Бесплатно в комплекте с оборудованием
посмотреть все
Нам доверяют
Отзывы
Сергей Собянин
Мэр Москвы
«Мы много слышали об умных городах (Smart City) и всегда думали, что это где-то очень далеко, не у нас. Но наш любимый патриархальный город Москва стремительно превращается в умный город. Если сравнить по тем или иным параметрам информационные сервисы, которые есть у нас и в других городах, то вы c очевидностью увидите, что Москва становится одним из мировых лидеров в этой отрасли»
официальный сайт мэра Москвы
Александр Прищеп
Заместитель директора ФИПС
Выражаем благодарность Вам и Вашим сотрудникам за поставленное оборудование. Высокая квалификация и компетентность позволили качественно и в срок выполнить свои обязательства в рамках заключенных договоров.
Дмитрий Чибисов
Начальник Управления ИТ и связи АК «АЛРОСА»
Мы сократили финансовые и временные затраты связанные с процессами бухгалтерии и кадров. Теперь любой сотрудник компании может быстро и качесвтенно получить информацию и распечатать нужные ему справки, например справку 2НДФЛ или расчетный лист прямо с киоска! Вот она настоящая автоматизация!
Замыцкий Михаил Дмитриевич
Директор по развитию сети «Ситилинк»
«Сотрудники компании за короткий срок выпустили 413 терминалов самообслуживания, содержащих все необходимое оснащение для работы с биометрическими данными. Мы благодарны коллегам за проделанную работу, в первую очередь, за скорость выполнения сложного заказа под наши индивидуальные требования»
Алханов Руслан Шахаевич
Министр Генерал-лейтенант полиции
От имени Руководства МВД по Чеченской Республике и себя лично выражаю BM GROUP «Фабрика инноваций» признательность и благодарность за высокий профессионализм и сотрудничество с органами внутренних дел Чеченской Республики
Е.Ю. Жукова
Директор МУНИЦИПАЛЬНОГО УЧРЕЖДЕНИЯ ДОПОЛНИТЕЛЬНОГО ОБРАЗОВАНИЯ «ДЕТСКАЯ ШКОЛА ИСКУССТВ No 8» имени Ю. Г. Суткового города ЧЕЛЯБИНСКА
В рамках национального проекта «Культура» федерального проекта «Культурная среда» в МБУДО «ДШИNo8» им. Ю.Г. Суткового г. Челябинска появился очень необычный экспонат. Это – мультимедийный стол Genius 43.
Благодарим BM GROUP «Фабрика инноваций» за качественную и надежную продукцию, за возможность популяризации образовательных услуг нашей школы и создание ее позитивного, идущего в ногу со временем имиджа.
Дмитрий Чернов
IT управление Москвариума на ВДНХ
Мы решили проблему с автоматизацией и очередями в нашем океанариуме. Процесс получился очень простым и понятным для посетителя: подошел к терминалу, приложил свою карточку, увидел свою фотосессию, выбрал нужные фотографии на огромном и ярком тач дисплее и все.
Микулина Елена Николаевна
Заведующий МБДОУ №16
Благодарим нашего поставщика ООО BM GROUP «Фабрика инноваций» за добросовестное отношение и профессанальную работу в области поставок нтерактивного оборудования для детского сада №16 г. Кингисеппа
Никулинская Нина Николаевна
Директор МБУК “Тотемская ЦБС”
МБУК “Тотемская ЦБС” выражает искреннюю благодарность BM GROUP «Фабрика инноваций».
За период нашего сотрудничества мы отметили Вашу компетентность, оперативность и стремление сделать свою работу качественно и своевременно.
Благодарим за оказанную профессиональную помощь в подготовке документации и приобретении современного интерактивного стола. Хотим особенно отметить Ваших менеджеров, которые оперативно предоставляют информацию и подробно отвечают на все возникшие вопросы.
Благодарим за профессионализм!
Николай Степанов
Директор и основатель
Компания «Копир-Техно» благодарит нашего партнера BM GROUP «Фабрика инноваций» за высокую оперативность и индивидуальный подход при изготовлении и поставке интерактивной панели.
О.Н. Макарова
Директор КГКУ Центр занятости населения города Петропавлоска-Камчатского
Краевое государственное казеное учреждение «Центр занятости населения города Петропавлоска-Камчатского» выражает искреннюю благодарность
Обществу с ограниченно йответственностью BM GROUP «Фабрика инноваций»
за добросовестное отношение и профессиональную работу в области поставок оборудования для КГКУ ЦЗН города Петропавлоска-Камчатского в 2020 году.
П.А. Збиняков
Заместитель генерального директора СПб ГБУК «МВЦ»
Благодарим сервисный центр BM GROUP «Фабрика инноваций» за высокий профессионализм и качество оказаных услуг, проявленных в ходе технического обслуживания, ремонта и обеспечения бесперебойной работы мультимедийного, проекционного, сетевого и коммутационного оборудования мультимедийного исторического парка «Россия — Моя история» Санкт-Петербург.
Пресс-служба
Аэропорт Толмачево
«Киоски имеют современный дизайн, боковую светодиодную подсветку и фирменный стиль оформления. Также рассматривается возможность программной доработки и создания на базе информационных киосков интерактивной карты аэропорта с навигацией»
ВашГород.ru
Михаил Федяев
Президент холдинга «Сибирский деловой союз»
«Сотрудниками BM GROUP «Фабрика инноваций» была произведена застройка мероприятия «Дни Кузбасса» проекционным и интерактивным оборудованием в Совете Федерации, которое позволило отобразить все разнообразие экономики из жизни Кузбасса и сделать выставку яркой и незабываемой»
Татьяна Емельянова
Долго искала подарок для своей внучки, случайно в интернете увидела рекламу интерактивного стола BM GROUP «фабрика инноваций», решила купить. Покупкой очень довольны. Хотя, стоимость достаточно высокая, но оно того стоит. В стоимость входило несколько образовательных программ для детей от 3-х лет до 5-ти «Я расту». Экран очень яркий, ребенку все прекрасно видно под любым углом. Корпус не имеет острых углов. Моя внучка с большой радостью занимается, результат от занятий уже есть. Определенно удачная покупка. Оставляю свой отзыв для выражения благодарности специалистам за желание понять и помочь.
Д.А. Рычков
Исполняющий обязанности генерального директора ООО «НПЦ «НовАТранс»
Выраажаем благодарность сервисному центра BM GROUP «Фабрика инноваций» за заботу о своих клиентах, качественную работу и ответственный подход. Спасибо за то, что всегда идете навстречу, решая самые неординарные вопросы.
Реализованные проекты
АЛРОСА
РЖД
Больше проектов
Станьте нашим дилером
Оставьте ваши контакты в форме и наш менеджер свяжется с вами в течение дня для уточнения деталей
Национальный поставщик FRP и стальных резервуаров для хранения
PPE TANKS ЯВЛЯЕТСЯ НАЦИОНАЛЬНЫМ ПОСТАВЩИКОМ FRP И СТАЛЬНЫХ РЕЗЕРВУАРОВ ДЛЯ ХРАНЕНИЯ. МЫ ВАШИ СПЕЦИАЛИСТЫ ПО ЗАКУПКАМ РЕЗЕРВУАРОВ, КОГДА БЕЗОПАСНОСТЬ, ОБСЛУЖИВАНИЕ И ДОЛГОВЕЧНОСТЬ ЯВЛЯЮТСЯ ГЛАВНЫМИ ПРИОРИТЕТАМИ.
PPE Tanks специализируется на проектах промышленного и коммерческого производства, требующих изготовления качественных заводских резервуаров из стекловолокна и стали, а также больших резервуаров для хранения, устанавливаемых на месте, для клиентов в Соединенных Штатах.
Все наши продукты производятся в соответствии со строгими отраслевыми стандартами и кодами (например, кодами API 650, API 12F, API 12P, UL 142 и ASME), чтобы обеспечить высочайший уровень безопасности и качества. Наши индивидуальные возможности распространяются на создание резервуаров, которые требуют сертификации или соответствия NSF 61 для питьевой воды (есть разница) и NFPA 22 для резервуаров пожаротушения и соответствия ASME RTP-1. Наши клиенты предпочитают работать с нами постоянно, потому что, когда речь идет о правилах, требованиях к смоле и выполнении требований проекта, наши инженеры предлагают нестандартные технические решения, которые превосходят конкурентов. Наша приверженность успеху вашего проекта не имеет себе равных. Мы не поставщик танков, мы партнер проекта.
Наши отраслевые эксперты предлагают широкий спектр решений для резервуаров и оборудования, которые точно соответствуют спецификациям наших клиентов, благодаря индивидуальному процессу управления проектами. Будьте уверены, мы не только предоставим продукт премиум-класса, но и будем сотрудничать с вашей организацией, чтобы обеспечить исключительное качество обслуживания клиентов, что сделает процесс закупок беспрепятственным.
Есть вопросы? Позвоните нам по телефону (512) 601-5525
НУЖНА ЦЕНА?
ИННОВАЦИОННЫЕ РЕШЕНИЯ ДЛЯ УНИКАЛЬНЫХ ПРОЕКТОВ
PPE Tanks предлагает самые конкурентоспособные цены и сроки поставки, оперативное обслуживание клиентов, индивидуальное производство и наиболее эффективную доставку. Если у вас есть уникальный индивидуальный проект с множеством задач или вам нужна консультация специалиста по типу резервуара, который наилучшим образом соответствует вашим потребностям и бюджету, мы можем помочь. Имея впечатляющую сеть отраслевых партнеров, мы обеспечиваем бесперебойную работу всех компонентов проекта. Когда вы сотрудничаете с PPE Tanks, мы делаем тяжелую работу, чтобы ваш проект резервуара был выполнен правильно.
Наши коммерческие резервуары изготавливаются по индивидуальному заказу для удовлетворения уникальных потребностей каждого проекта. Мы можем управлять каждой деталью, от сертификатов NSF до оптимальных материалов для климата и условий окружающей среды.
Компания PPE производит качественные решения для хранения от септических до едких сточных вод как для промышленных, так и для муниципальных нужд. Мы завершили успешные проекты для городов, округов и коммерческих клиентов, которые соответствуют всем нормативным требованиям.
Мы поставляем безопасные, надежные и долговечные резервуары из стекловолокна и стали, соответствующие стандартам, одобренным AWWA и NFPA22. Существует множество вариантов противопожарной защиты или тушения. Мы можем помочь вам выбрать правильный для вашего проекта.
Резервуары для хранения химикатов могут изготавливаться различных размеров и форм и используются для статического хранения, обработки, смешивания и транспортировки как сырья, так и готовых химических продуктов .
Изготовленные в соответствии с вашими требованиями, мы предлагаем множество решений для ликероводочных заводов, пивоваренных заводов, виноделен, пищевых продуктов и многого другого.
QUICK QUOTE
Соблюдение и обеспечение соблюдения федерального Закона о безопасной питьевой воде (SDWA) для защиты здоровья населения (относящегося к питьевой воде) осуществляются в соответствии с положениями отдельных штатов. Большинство государственных программ питьевой воды находится в ведении государственных департаментов здравоохранения, окружающей среды и/или природных ресурсов. Чтобы узнать ответы на многие распространенные вопросы о правилах питьевой воды, ознакомьтесь с публикацией Национального санитарного фонда (NSF) «Питьевая вода имеет значение 9». 0003
первоклассные продукты начинаются на этапе проектирования
Разработаны для обеспечения долговечности и безопасности
Наша миссия для каждого проекта — достичь идеального уровня качества, продуманного дизайна и экономической эффективности для обеспечения долговечности. Когда эти принципы проекта находятся на переднем крае, результатом является продукт, изготовленный в соответствии с самыми высокими стандартами безопасности, который превзойдет по своим характеристикам резервуар низкого качества. Резервуары, для которых долговечность и безопасность являются приоритетом № 1, требуют менее дорогостоящего обслуживания, надежны в течение всего срока службы резервуара и неизменно отвечают требованиям производительности. Результатом является первоклассный продукт, когда безопасность имеет первостепенное значение.
Ищете хранилище для питьевой воды, соответствующее NSF/ANSI 61? Большинство государственных учреждений регулируют поставки питьевой воды и требуют, чтобы хранение питьевой воды соответствовало требованиям. Мы можем провести вас через проект, порекомендовать правильную смолу и применение, которое является подходящим, рентабельным и, самое главное, безопасным.
опытная команда, преданная вашему проекту
Первоклассные ресурсы у вас под рукой
PPE Tanks обладает более чем 30-летним опытом работы. Наши специалисты креативны, находчивы и целеустремленны. У нас есть опыт предоставления уникальных решений для сложных и сложных проектов. Партнерство с PPE означает использование нашей общенациональной сети поставщиков сырья, производителей и грузовых перевозчиков для получения самого прочного, безопасного и надежного продукта по самой конкурентоспособной цене.
Мы обеспечиваем высочайший уровень обслуживания каждого клиента и каждого проекта от концепции до завершения. Наша философия заключается в том, что мы не просто поставщик проекта, а партнер в вашем успехе.
Независимо от того, ищете ли вы стальной бак с плоскими панелями или нестандартный бак из стекловолокна, мы можем заказать резервуары для хранения, изготовленные в нашем магазине, со стандартным плоским дном, цилиндрическим корпусом, конфигурацией с куполообразным верхом или по индивидуальному заказу. Мы предлагаем конические днища с ножками или юбкой, вертикальные или горизонтальные резервуары на полозьях или седлах. Мы можем настроить ваш резервуар для хранения в соответствии с точными спецификациями для проектов по водоснабжению и сточным водам, химикатам, продуктам питания и напиткам, сельскому хозяйству, нефти и газу.
У вас есть большой проект, который нужно построить на месте? Мы можем помочь вам и в этом.
Когда время — деньги, мы используем нашу сеть ресурсов
Находчивый подход к сокращению сроков выполнения заказов
Используя нашу обширную сеть производственных партнеров в Соединенных Штатах, мы можем быстро найти поставщиков в непосредственной близости от проекта сайт и значительно сократить общее время выполнения заказа и транспортные расходы, а также легко соблюдать нормативные акты штата .
На сегодняшнем нестабильном топливном рынке транспортировка продукта может сильно ударить по бюджету проекта. Большинство производителей резервуаров заключают контракты с одной или двумя транспортными компаниями с установленными ценами. У нас также есть огромный список партнеров по грузоперевозкам, и мы можем предложить вам самое выгодное предложение.
ГОТОВЫ СДЕЛАТЬ ПРЕДЛОЖЕНИЕ?
Отзывы
«PPE Tanks справились со сложным проектом, который требовал настоящего аналитического взгляда. Они потратили время, чтобы оценить чертежи, существующую инфраструктуру и дали новые рекомендации по дизайну, которые в конечном итоге сэкономили нам средства на проект».
Патрик Томсон
«Наши инженеры вызвали стальные резервуары для проекта замены. После того, как PPE все проверил, оказалось, что FRP будет более подходящим и требует меньше обслуживания. Они изготовили резервуары ближе к строительной площадке, поэтому у него была примерно половина фрахта по сравнению с другими участниками торгов. В итоге мы выиграли проект».
Джефф Доу
«Наш проект по тушению пожара в больнице требовал сборки на месте, что требовало консультации специалиста. СИЗ пришли и обеспечили необходимый дизайн, чтобы сделать его успешным. Наша команда инженеров была очень признательна за их вклад.
Чак Дж. Реддинг
Некоторые из наших клиентов
Оборудование для производства видео | Гитарный центр
00000″, «defaultDisplayName»: «Широкоугольный кинообъектив Rokinon Cine DS 24 мм T1.5 для Canon EF», «styleThumbWidth»: «60», «styleThumbHeight»: «60», «Параметры стиля»: [ ] }
Широкоугольный кинообъектив Rokinon Cine DS 24 мм T1.5 для Canon EF
Ваша цена $699,00 MSRP:799.0,низкаяЦена:699.0
0 Отзывы
Сравнить Сравнить сейчас сайт51500000000328099 1500000354535
{ «inCheckoutPromo»:[] , «thumbImageID»: «Набор из двух-2-регулируемых по высоте подставок с поворотными светодиодными кольцами и универсальными держателями для телефонов/L82733000000000», «defaultDisplayName»: «Набор Gator из двух (2) регулируемых по высоте подставок с поворотными светодиодными кольцевыми фонарями и универсальными держателями для телефонов», «styleThumbWidth»: «60», «styleThumbHeight»: «60», «Параметры стиля»: [ ] }
Набор Gator из двух (2) регулируемых по высоте подставок с поворотными светодиодными кольцевыми фонарями. ..
Ваша цена $49,99 MSRP:79.99,низкаяЦена:49.99
0 Отзывы
Сравнить Сравнить сейчас сайт51500000000320235 1500000344786
{ «inCheckoutPromo»:[] , «thumbImageID»: «10-дюймовая-светодиодная-кольцевая-подставка-с-держателем-телефона-штативом-базой/L82711000000000», «defaultDisplayName»: «10-дюймовая светодиодная кольцевая подставка Gator с держателем для телефона и основанием для штатива», «styleThumbWidth»: «60», «styleThumbHeight»: «60», «Параметры стиля»: [ ] }
Gator 10-дюймовая светодиодная кольцевая подставка с держателем для телефона и основанием для штатива
Ваша цена $39,99 MSRP:47,99,низкаяЦена:39,99
0 Отзывы
Сравнить Сравнить сейчас сайт51500000000320239 1500000344789
Сравнить Сравнить сейчас сайт51500000000315137 1500000336963
{ «inCheckoutPromo»:[] , «thumbImageID»: «Halo-16-Bicolor-16in-LED-AC-Battery-16in-LED-Ring-Light-with-USB-Power-Passthrough/L86596000000000», «defaultDisplayName»: «NANLITE Halo 16 Bicolor 16in LED AC/Battery 16in LED Ring Light with USB Power Passthrough», «styleThumbWidth»: «60», «styleThumbHeight»: «60», «Параметры стиля»: [ ] }
NANLITE Halo 16 Bicolor 16″ LED AC/Battery 16″ LED Ring Light с USB Po. ..
Ваша цена $149.00 MSRP:149.0,низкаяЦена:149.0
0 Отзывы
Сравнить Сравнить сейчас сайт51500000000328364 1500000355048
Wehrhahn Оборудование | Оптимальное оборудование для Ваших потребностей
Продукты из газобетона
Производственный процесс
Производственные линии
Эффективность производства
Системы электроуправления
Модернизация
Сделано в Германии
Сервис
Самая высокая продуктивность в сочетании с экологичностью: безотходность производства, высокоточная резка и безупречная геометрия изделий, низкий расход энергоресурсов и сырья.
Чтобы наилучшим образом удовлетворять разнообразные требования рынка, мы предлагаем два основных типа линий: Wehrhahn SMART и Wehrhahn PLUS с производительностью от 200 до 2000 м3/сутки.
Общей особенностью всех линий Wehrhahn является то, что массив всегда режется в вертикальном положении. Это обеспечивает самую высокую точность резки и профилирование массива до автоклавной обработки.
Все линии Wehrhahn обеспечивают производство продукции самого высокого качества.
Какой тип линии оптимальным образом соответствует Вашим потребностям?
Мы будем рады проконсультировать Вас и ответить на все Ваши вопросы. Мы предложим Вам линию, полностью соответствующую Вашим потребностям и пожеланиям.
Производственные линии Wehrhahn нового поколения
подкупают своей инновационностью, эффективностью каждой единицы оборудования и технологического процесса в целом. Новая концепция успешно реализована на заводе Н+Н в пригороде Лондона.
Что делает новую линию особенно эффективной?
1. Производственные площади сократились почти на 30 % и используются максимально эффективно.
2. Фундаменты дешевле и быстрее: почти без приямков — невероятно, но факт!
3. Гидравлика на 60% заменена электромеханическими компонентами. Это позволяет снизить энергоемкость производства и затраты на техобслуживание оборудования.
4. Новые разработанные Wehrhahn модули систем электроуправления обеспечивают максимальную эффективность производственного процесса, в том числе благодаря саморегулирующемуся электроуправлению машин и прогнозирующим системам техобслуживания оборудования. Благодаря этому достигаются максимально высокий показатель Общей Эффективности Оборудования (OEE) и очень короткое время производственного цикла.
5. Линия резки полностью модифицирована с учетом новых требований с ассортименту и качеству продукции. Так, на установке продольной резки струны размещаются теперь ступенчато. Это уменьшает нагрузку на массив во время резки тонких блоков и панелей. Струны и ножи чистятся автоматически, что улучшает качество поверхности реза и предотвращает повреждение струн из-за налипания материала. Боковой триммер оборудован новой системой быстрой замены ножей и их автоматической чисткой.
6. Технологический процесс Линия оснащена установкой деления зеленого массива нового поколения. Внедрен новый элемент технологии, который позволяет подавать массив на резку при его оптимальной пластической прочности и одновременно предотвращает образование на блоках отпечатков от разделительной машины и автоклавных решеток.
WEHRHAHN SMART (массив автоклавируется в горизонтальном положении)
200 — 2 000 м3/сутки
На наших линиях SMART массив после резки снова кантуется в горизонтальное положение. Это позволяет разделять массив по линиям реза перед автоклавной обработкой. На линиях SMART возможно производство панелей с супергладкой поверхностью.
WEHRHAHN PLUS (массив автоклавируется в вертикальном положении)
700 — 1 400 м3/сутки
Линия PLUS – единственная линия по производству газобетона на рынке, позволяющая выпускать массивы, проходящие автоклавную обработку в вертикальном положении, без отходов производства. Это обеспечивает наша запатентованная установка удаления нижнего подрезного слоя массива. Линия PLUS характеризуется компактным расположением оборудования и простой эффективной упаковкой.
Наши линии по производству автоклавного газобетона
отличаются самой высокой продуктивностью и универсальностью: отсутствие технологических отходов, максимальная точность резки, малая энергоемкость производства (кВт·ч/м3) и минимальный расход сырья.
НЕМЕЦКОЕ ОБОРУДОВАНИЕ: ПОКУПАЮТ МНОГО, НО НЕМНОГИЕ
Второй год подряд Россия занимает первое место в структуре экспорта немецкого деревообрабатывающего оборудования. По официальным данным в 2013 году российские клиенты закупили оборудования на сумму около 177 млн. евро (без налогов). Это меньше, чем в 2012 году на 11 %. Второе и третье место заняли соответственно Китай ( 153 млн. евро со снижением 21%) и Франция ( 125 млн. евро — плюс 5 %). До 2011 года место импортера номер один занимал Китай. Например, в 2010 году соотношение немецкого экспорта в Россию и Китай было 102 и 231 млн. евро.
При этом Германия произвела в 2013 году на 5 % меньше деревообрабатывающих станков, чем год назад. Годовой оборот составил 2,2 млрд. евро против 2,3 в 2012 г. Общий объем экспорта составил 1,7 млрд. евро.
Расчеты показывают, что 177 млн. евро экспорта без НДС (EXW) соответствуют минимум 260 млн. евро с НДС, потраченным российскими фабриками на покупку немецкого деревообрабатывающего оборудования с учетом транспортных, таможенных расходов, НДС и дилерского процента.
Чтобы понять много это или мало попробуем определить сколько с среднем пришлось на каждое предприятие. Росстат утверждает, что деревообработкой в России занимаются около 18,7 тысяч предприятий (мебельных, столярных, лесопильных и т.д.). Но мы знаем, что практически каждое производственное предприятие представлено несколькими юридическими лицами. Часть предприятий занимаются не производством, а торговлей или другими услугами, а часть – вообще только числятся на бумаге. Возьмем на себя смелость оценить число реальных производств, закупающих какое-либо оборудование очень приблизительно в 10 тыс. ( в данном случае точная цифра не так важна).
2013 год был не простым и примерно половине российских деревообработчиков (т.е. 5 тыс.) в 2013 году было вообще не до новых станков. А остальные 5 тыс. покупали не только немецкое, но и итальянское, и китайское оборудование. По европейской статистике в стоимостном выражении экспорт в Россию распределяется примерно так: 53 % Германия, 20 % Италия, 13 % Китай. Данные Евросоюза по китайскому экспорту в Россию (особенно в азиатскую часть) явно не полные. С учетом этого, а также разницы в ценах на оборудование из этих стран соотношение в натуральном выражении ( в штуках) будет несколько иным. Точных данных нет, но рискнем предположить, что эти страны распределятся примерно по 30 % (10 % оставим на другие страны и отечественные станки).
Также понятно, что каждое отдельное предприятие закупает оборудование из разных стран, но для расчета представим, что покупатели также по 30 % распределены по основным экспортерам. Тогда получается, что в «одни руки» немецкого оборудования в среднем попадает на 260 000 000 /( 5 000 х 0,3) ≈ 170 тыс. евро.
Средняя цифра в 170 тыс. евро, выведенная нами из достаточно субъективных допущений, выглядит тем не менее достаточно правдоподобно. То, что при этом многие фирмы покупают относительно недорогие немецкие станки ( форматные, фрезерные, ручные кромкооблицовочные) по цене 20 – 30 тыс. евро, говорит о том, что полученный нами средний результат достигается за счет контрактов в сотни и даже миллионы евро.
В любом случае ясно следующее:
— дорогостоящее немецкое оборудование продается в Россию в достаточно больших объемах,
— распределяется оно не равномерно, оседая в основном у ограниченного круга предприятий, обладающих для этого необходимыми ресурсами,
— эти наиболее сильные игроки рынка, благодаря хорошему техническому оснащению, могут обеспечить высокое качество, чем и привлекают все больше клиентов,
— в результате без заказов остаются остальные производители,
— круг замыкается – ресурсы продолжают концентрироваться. Появляются фабрики, сопоставимые по оснащенности с европейскими.
Это естественный процесс становления рынка. Следующим этапом развития отрасли могла бы стать кооперация, когда оснащенные на высоком индустриальном уровне фабрики, выполняли бы заказы не только конечных потребителей, но и развитой сети небольших цехов, дизайн-студий и т.п. Пока же в России множество «гаражных» мастерских, выпускающих мебель или двери на «детских» станках, но стремящихся сохранить полный цикл производства. В результате страдает качество, не хватает технического персонала, постоянный аврал и сбои.
Приведенные выше цифры позволяют оценить объем произведенного деревообрабатывающего оборудования, оставшегося в 2013 году на внутреннем рынке Германии: 2,2 млрд – 1,7 млрд = 0,5 млрд. евро. Обратите внимание — это больше, чем суммарный экспорт в Россию, Китай и Францию. Таким образом, если импортером номер один для Германии является Россия, то покупателем номер один с большим отрывом является сама Германия.
Смотрите также…
ЭТО – МНЕ, ЭТО – ТЕБЕ, ЭТО – ОБРАТНО ТЕБE, ЭТО ВСЕ ВРЕМЯ ТЕБЕ …
РОССИЯ — БЫЛА ПЕРВОЙ, СТАЛА ВОСЬМОЙ ДЕРЕВООБРАБАТЫВАЮЩЕЕ ОБОРУДОВАНИЕ — НОВЫЕ РЕКОРДЫ
Машины и оборудование — ЗАВОД ГЕРМАНИЯ.
Машины и оборудование — ЗАВОД ГЕРМАНИЯ.
Эти результаты поиска предоставлены germanyworks.com и используют базу данных German Trade & Invest, агентства экономического развития Федеративной Республики Германии, для предоставления дополнительной информации.
Машиностроение Германии в цифрах
3-й
Германия занимает третье место по обороту индустрии МиО в мире (Китай № 1, США № 2).
Индустрия 4.0
Немецкая индустрия МиО делает Германию ведущей страной в мире Индустрии 4. 0 с заметным ростом рынка с 2015 по 2019 год.
6 600
С точки зрения уровня активности МиО является крупнейшим сектором Германии, в котором задействовано почти 6 600 компаний по всей цепочке создания стоимости.
16 процентов
Немецкая индустрия M&E является ведущим мировым производителем промышленного оборудования, на долю которого приходится 16 процентов мировой торговли промышленным оборудованием.
Подробнее на GTAI.com
Даже в производственном секторе энергоэффективные решения в производственных технологиях будут играть решающую роль в достижении амбициозных целей Германии в области защиты окружающей среды. Немецкие компании, работающие в энергоемких отраслях промышленности, десятилетиями работали над оптимизацией энергоэффективности производственных процессов.
Германия с самой высокой плотностью роботов является европейским центром робототехники и автоматизации: 346 роботов / 10 000 сотрудников
R&A Оборот отрасли увеличился более чем вдвое с 2009 по 2019 год: 6,2-14,7 млрд евро
В 2019 году по сравнению с 2 млрд евро в 2015 году машинное зрение имеет самые высокие темпы роста. Комплексные сборочные решения остаются крупнейшим сегментом отрасли.
Автомобильная промышленность является крупнейшим производственным сектором в Германии, а также крупнейшим потребителем робототехники.
Технология производства претерпевает радикальные изменения с появлением на фабрике Интернета вещей. Индустрия 4.0 позволит компаниям создавать взаимосвязанные процессы и делать их более гибкими и клиентоориентированными. Ожидается, что Индустрия 4.0 увеличит валовую добавленную стоимость сектора МиО на 23 миллиарда евро до 2025 года.
Индустрия 4.0
является движущей силой изменений в автомобильном секторе Германии. Внутренний рынок решений Industrie 4.0 в этой отрасли вырос на 20 процентов до 2,1 миллиарда евро в 2016/17 году.
Битком
Немецкая ассоциация информационных технологий, телекоммуникаций и новых медиа прогнозирует ежегодный потенциал добавленной стоимости в размере 2,1 млрд евро до 2025 года для решений Industrie 4. 0 в автомобильной промышленности, таких как данные в реальном времени и человеко-машинные интерфейсы.
Ожидается, что профилактическое обслуживание будет играть особенно важную роль в автомобильном производстве в течение двух-пяти лет.
Смарт
Согласно рейтингу Staufen German Industrie 4.0 Index 2017, практически все компании автомобильного сектора уже используют «умные» концепции.
Подробнее на GTAI.com
Германия занимает ведущее место в мире в области интеллектуальной собственности в отношении промышленных роботов.
Подробнее на GTAI.com
Исследовательские кластеры стимулируют инновации и предлагают отличные инвестиционные возможности – например, технологическая сеть it’s OWL, одна из самых важных инициатив Industrie 4.0 в Германии. it’s OWL объединяет более 200 компаний и исследовательских институтов с целью поиска решений для обработки данных с машин, создания новых услуг и бизнес-моделей, а также использования технологий для улучшения условий труда.
Подробнее читайте на its-owl.com
Машиностроительная промышленность Германии может похвастаться продуктивной, образованной рабочей силой , а также стабильными ставками заработной платы с течением времени. Гибкие методы работы, такие как срочные контракты и посменная система, повышают конкурентоспособность Германии, предлагая инвесторам доступный и высококачественный климат для производства.
Рабочая сила Германии по уровню профессионального образования в 2018 г. В 2018 г. было выпущено более 55 000 инженеров и около 60 000 математиков и естествоиспытателей.
50
квалифицированные мастера (ученики двойного образования)
%
23
выпускников вузов
%
17
неквалифицированный
%
10
выпускники профессиональных колледжей и техники
%
Машиностроительная промышленность Германии заняла первое место среди всех других европейских стран в качестве направления для ПИИ в 2010–2020 годах, в общей сложности 1180 проектов ПИИ.
Ведущая роль Германии в области промышленных машин и оборудования обусловлена синтезом высококвалифицированной рабочей силы, превосходных ресурсов поддержки для исследований и разработок и давних инженерных традиций — все необходимые детали для последней промышленной революции, Industrie 4.0. Свяжитесь с нами, чтобы узнать больше.
✉
Промышленность
Аэрокосмическая промышленность
Новая мобильность
Строительная промышленность
Химическая промышленность
Потребительская промышленность
Корпоративные услуги
Электроника и микротехнологии
Энергия
Экономика замкнутого цикла
Водородные технологии
Финансы
ИКТ
Науки о жизни
Логистика
Машины и оборудование
О
Связаться с
загрузок
Германия
Сетевой этикет
Официальное уведомление
Политика конфиденциальности
Германия Машиностроение и оборудование – вершина мира
Большинство современных станкостроительных компаний находятся в Германии. Будучи самой развитой в мире станкостроительной страной, правительство Германии всегда придавало большое значение важному стратегическому положению станкостроительной промышленности, а также как фундаментальным научным исследованиям, так и исследованиям в области прикладных технологий.
Машиностроение мира-Германия
Сфера машиностроения включает машиностроение в широком смысле и машиностроение в узком смысле. Машиностроение в широком смысле включает общее машиностроение, электронные двигатели, транспортные средства, прецизионные приборы и т. Д. Машиностроение в узком смысле обычно относится к машиностроению и производству оборудования. В Германии английский язык для машиностроения и оборудования — «Машиностроение», а в Японии английский язык для общего машиностроения — «Общее машиностроение».
Представителями лучших мировых механических держав являются Германия, США и Япония. Население Германии составляет 82,79 миллиона человек, а национальный доход составляет 47 450 долларов США на человека в год. Население Соединенных Штатов составляет 327,16 миллиона человек, а национальный доход составляет 62 850 долларов США на человека в год. Население Японии составляет 126,23 миллиона человек, а национальный доход составляет 41 340 долларов США на человека в год.
Германия – мировой лидер в области машиностроения. Население Германии составляет 65% населения Японии, а экспорт машин и оборудования в 1,77 раза превышает экспорт Японии. Население Германии составляет всего 25% населения США, а экспорт в 1,52 раза больше, чем в США. Немецкая ассоциация машиностроения VDMA объявила, что ее экспорт в 2018 году составил 177,8 млрд евро, из которых на Европу пришлось 57%, на Азию — 24%, на Северную Америку — около 12%, а на другие рынки — около 7%.
Согласно информации, опубликованной Немецкой ассоциацией машиностроения VDMA, в 2017 году на долю Германии приходилось 15,9% мировой торговли машинами и оборудованием, на Китай приходилось 13,2%, на США приходилось 10,0%, на Японию приходилось 9,6%, на Италию. приходилось 7,3%, а на пятерку вместе взятых приходилось около 6 В объеме торговли.
По оценкам Немецкой ассоциации машиностроения VDMA, мировой оборот машиностроительной промышленности в 2018 году составил 2,600 миллиарда евро. В первую пятерку стран-производителей входят материковый Китай, США, Германия и Япония, на которые вместе может приходиться более 70% мирового дохода. На первую десятку может приходиться более 80% мирового дохода. Выручка машиностроительной промышленности Германии достигла 297 миллиардов евро в 2018 году, что составляет 11,4% мировой индустрии машин и оборудования.
Индустрия 4.0 Немецкие станки ориентированы на умные заводы
Доля общего машиностроения в производстве
Общее машиностроение является наиболее важным в развитых странах. По данным развитых стран, таких как Германия и Япония, машиностроение в широком смысле составляет около половины всей обрабатывающей промышленности.
Согласно данным обрабатывающей промышленности Германии, в 2018 году доход машиностроения и оборудования составил 232 миллиарда евро, электронной и электрической промышленности — 193 миллиарда евро, производства транспортных инструментов — 300 миллиардов евро, а доход от производства — 1,5010 млрд евро. На долю машиностроения в Германии приходилось 48% обрабатывающей промышленности.
Типичные показатели немецкого машиностроения и оборудования
Машиностроение является наиболее важным в развитых странах. По данным развитых стран, таких как Германия, Япония и США, машиностроение составляет около половины всей обрабатывающей промышленности.
Машиностроение и оборудование должны поддерживать обрабатывающую промышленность страны в целом и, что более важно, оборонную промышленность. Производственный бизнес страны опирается на машиностроение и оборудование для повышения своей конкурентоспособности. Независимая оборонная промышленность нуждается в поддержке отличной техники и оборудования.
Характеристиками отрасли машин и оборудования являются крупные инвестиции, медленное восстановление, высокотехнологичные таланты и т. д. Промышленность машин и оборудования является действительно капиталоемкой, технологичной и трудоемкой отраслью, а машиностроение и промышленность оборудования имеет много малых и средних предприятий, а в Германии много скрытых чемпионов отрасли.
Машиностроение Германии является отраслью с наивысшей производительностью инженерно-технического персонала. Он занимает одно из первых мест в мире по количеству немецких компаний, занимающихся машинами и оборудованием, занятости, корпоративным доходам, производительности труда персонала, производству и экспорту. Германия также является производителем машин и оборудования номер один в мире.
В 2018 году в немецкой машиностроительной промышленности насчитывалось 6 523 предпринимателя (3 200 членов VDMA, что составляет около половины), общий промышленный доход составил 232,5 миллиарда евро, занято 1,05 миллиона сотрудников и производительность труда 218 200 евро / человеко-год. Объем производства составляет 224,3 млрд евро, общий экспорт – 177,8 млрд евро, импорт – 75 млрд евро, продажи на внутреннем рынке – 46,5 млрд евро, внутренний рынок – 121,5 млрд евро.
Репрезентативная продукция немецкого машиностроения и оборудования
Машиностроение и производство оборудования являются важнейшей отраслью в развитых странах. Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Отрасль машин и оборудования должна поддерживать обрабатывающую промышленность страны в целом. Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Промышленность машин и оборудования в Германии можно разделить на более чем 30 продуктов, из которых более 100 продуктов находятся в середине и тысячи продуктов подкатегорий и т. д.
Типичные отрасли немецкого машиностроения и оборудования включают машиностроение, технологии обработки материалов, технологии воздушного транспорта, станки, оборудование для упаковки пищевых продуктов, сельскохозяйственное оборудование, клапаны и трубопроводную арматуру, строительную технику и машины для производства строительных материалов, гидравлическое силовое оборудование. и т. д. На долю отрасли может приходиться около половины экспорта. Кроме того, оборудование для пластмасс и резины, текстильное оборудование, насосы, деревообрабатывающее оборудование, системы двигателей, горнодобывающее оборудование, оборудование для всего завода, роботы и автоматизация, компрессорные и вакуумные системы, прецизионные инструменты, технологии контроля и испытаний, технологии печати и изготовления бумаги и т. д. ., есть представители пола.
Прочее, такое как полупроводниковое и панельное оборудование, технология теплопередачи, лифты и эскалаторы, технология автоматизации двигателей, энергосистемы, литейное оборудование, технология производства одежды и кожи, производственное оборудование для выплавки металла, промышленные печи, технология сварки, системы очистки, помощь при стихийных бедствиях оборудование, защитное и страховое оборудование и т. д.
Представитель экспортной продукции немецкого машиностроения и оборудования
Машиностроение и оборудование являются наиболее важной отраслью промышленности в развитых странах. Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Германия также является крупнейшим в мире экспортером машин и оборудования.
В 2016 году экспортная стоимость репрезентативных продуктовых проектов Германии в машиностроении и оборудовании составила 155,8 млрд евро, например, экспорт систем воздушного транспорта и технологий — 10,3 млрд юаней, что составляет 6,6% от общего объема экспорта. Стоимость проекта по передаче электроэнергии составила 13,7 млрд евро, что составляет 8,8% от общего объема экспорта. Клапанов и фитингов экспортировано на 7,85 млрд евро, что составляет 5,0%. Строительная техника и машины для строительных материалов 7,84 млрд евро, что составляет 5,0%. Экспорт продукции и технологий для обработки материалов составил 11,2 млрд евро, что составляет 7,2%. Стоимость экспорта сельскохозяйственной техники составила 8,01 млрд евро, что составляет 5,1%. Экспортная стоимость оборудования для пищевых продуктов и упаковки составила 8,29 долл. США.млрд евро, что составляет 5,3%. Экспорт станков составил 9,18 млрд евро, что составляет 5,9%. На эти восемь отраслей может приходиться около половины экспорта.
Печатные и бумажные технологии стоили 4,28 миллиарда евро, гидравлическое силовое оборудование — 5,92 миллиарда евро, экспорт насосов — 5,01 миллиарда евро, деревообрабатывающего оборудования — 2,04 миллиарда евро, компрессоров и вакуумных систем — 4,93 миллиарда евро, оборудования для изготовления резины — 4,92 миллиарда евро. . Репрезентативны евро, технологии контроля и испытаний 3,57 млрд евро, энергосистема 5,40 млрд евро, прецизионные инструменты 5,55 млрд евро, стоимость экспорта текстильного оборудования 2,30 млрд евро и стоимость экспорта всего заводского оборудования 5,46 млрд евро.
Прочее, такое как горнодобывающее оборудование, системы двигателей, полупроводниковое и панельное оборудование, робототехника и автоматизация, производственное оборудование для плавки металлов, технология теплопередачи, лифты и эскалаторы, технология автоматизации двигателей, литейное оборудование, технология производства одежды и кожи, промышленные печи, сварка Технологии, системы очистки, оборудование для оказания помощи при стихийных бедствиях, оборудование для обеспечения безопасности и страхования и т. д.
Согласно статистике Немецкой машиностроительной ассоциации VDMA, страны и регионы, представляющие экспорт машин и оборудования в 2018 году, такие как США, заняли первое место. , с экспортной стоимостью 190,2 млрд евро, что составляет 10,8%. Второе место Китая экспортирует 19,1 млрд евро, что составляет 10,7%. Третья Франция экспортирует 11,6 млрд евро, что составляет 6,5%. Я следовал порядку 8,3 млрд евро для Италии, 7,7 млрд евро для Великобритании, 7,4 млрд евро для Нидерландов, 7,2 млрд евро для Польши, 7 млрд евро для Австрии, 5,5 млрд евро для Чехии, 5,5 млрд евро для Россия и др.
Если проанализировать экспортные регионы, крупнейшая стоимость экспорта Европы составляет 101,6 млрд евро, что составляет 57,1%. Стоимость экспорта Азии составила 41,9млрд евро, что составляет 23,6%. Третий североамериканский экспорт по стоимости составляет 20,9 млрд евро, что составляет 11,8%.
Немецкая промышленность машиностроения и оборудования ведущие отрасли промышленности в мире
Немецкая промышленность машиностроения и оборудования в основном поддерживает обрабатывающую промышленность всей страны. Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Самое главное — это экспорт на мировой рынок. Немецкую промышленность машин и оборудования можно разделить на более чем 30 продуктов, половина из которых экспортирует левые и правые позиции на первое место в мире, а некоторые продукты занимают второе место в мире.
Немецкая промышленность по производству машин и оборудования представляет собой товар номер один в мире в сфере торговли. Например, на технологии контроля и испытаний приходится 31,9% мировой торговли, на системы очистки — 29,1%, на деревообрабатывающее оборудование — 27,4%, на технологии печати и изготовления бумаги — 24,3%, на гидравлические системы — 23,9%, на машины для пластмасс и резины — 22,7%, на электроэнергию. трансмиссионное машиностроение 21,3%, станки 20,8%, пищевое и упаковочное оборудование 20,8%, промышленные печи 19,4%, сельскохозяйственная техника 190,1%, а технология обработки материалов — 18,7%, компрессоры и вакуумные системы — 16,3%, оборудование всего завода — 16,1%, насосы — 16,1% и т. д. такие как текстильное оборудование составило 18,5%, точные инструменты — 16,1%, клапаны и фитинги — 13,8%, энергетические системы — 12,8%, сварочные технологии — 12,5%, воздушные перевозки — 11,1% и т. д. Все шесть отраслей занимали важные позиции в мире.
Экспортные проекты и рынки немецкого машиностроения и оборудования в 2018 году
Германия является мировым лидером в области машин и оборудования. Население Германии составляет 65% населения Японии, а экспорт машин и оборудования в 1,77 раза больше, чем в Японии. Население Германии составляет 25% населения США, а экспорт в 1,52 раза больше, чем в США. Согласно таможенной статистике Германии, стоимость экспорта машин и оборудования в 2018 году составила 254,9 доллара США.млрд, что на 9,9% больше, чем годом ранее.
Экспортная стоимость репрезентативных продуктов Германии в машиностроительной промышленности в 2018 году составила 254,9 млрд долларов США. Репрезентативный продукт занимает первое место с экспортной стоимостью 42,2 млрд долларов США в двигателях и других компонентах, что составляет 16,6% от общего объема экспорта. Вторая стоимость экспорта гидравлического оборудования составила 22,4 миллиарда долларов США, что составляет 8,8% от общего объема экспорта. Третья стоимость экспорта химического оборудования составила 20,3 млрд долларов США, что составляет 8,0%. Ю Исю стоит 19 долларов.миллиардов механических компонентов, что составляет 7,5%.
В настоящее время отливки, листовой металл, контроллеры и другие детали, необходимые для станков, могут поставляться на месте.
Машины специального назначения – 18 млрд долларов США, что составляет 7,1%. Стоимость экспорта клапанов и альтернативных деталей составила 14,3 млрд долларов США, что составляет 5,6%. Объем экспорта бумаги и полиграфического оборудования составил 13,4 млрд долларов США, что составляет 5,3%. Стоимость экспорта транспортных машин составила 11,7 млрд долларов США, что составляет 4,6%. Экспорт станков составил 10,4 млрд долларов США, что составляет 4,1%. На эти девять товаров может приходиться около 70% экспорта.
Кроме того, стоимость экспорта оборудования для производства пластмасс и резины составила 6,40 млрд долларов США, стоимость экспорта текстильного оборудования — 5,59 млрд долларов США, строительной техники — 5,08 млрд долларов США, оборудования для кондиционирования воздуха и холодильного оборудования — 4,52 млрд долларов США, компонентов станков — 4,52 млрд долларов США. 4,08 миллиарда долларов США, полупроводниковое и панельное оборудование — 2,28 миллиарда долларов США, а деревообрабатывающее оборудование было экспортировано. Он также представлен стоимостью 2,06 миллиарда долларов США.
Прочее, такое как горнодобывающее оборудование, роботы и средства автоматизации, производственное оборудование для плавки металлов, технология теплопередачи, лифты и эскалаторы, технология автоматизации двигателей, производственное оборудование, швейная и кожевенная техника, промышленные печи, сварочные технологии, системы очистки, оборудование для оказания помощи при стихийных бедствиях , Защитное и страховое оборудование и т. д.
На экспортном рынке немецких машин и оборудования в 2018 году США заняли первое место со стоимостью экспорта в 28 миллиардов долларов США, что составляет 11,0% от общего объема экспорта, что на 12% больше, чем в предыдущем году. Материковый Китай занял второе место со стоимостью экспорта в 24,2 млрд долларов США, что составляет 9,5% экспорта, что на 14% больше, чем в предыдущем году. Третий объем французского экспорта составляет 16,7 млрд долларов США, что составляет 6,6%, увеличившись на 8,6% по сравнению с предыдущим годом. Экспорт Yu Yisequ в Великобританию составляет 13,6 млрд долларов США, что составляет 5,4%. Экспорт в Италию составил 11,7 млрд долларов, что составляет 4,6%. Экспорт в Нидерланды составляет 11,2 млрд долларов США, что составляет 4,4%. Экспорт в Австрию составил 10,9млрд долларов США, Польша 10,7 млрд долларов США, Испания 8,64 млрд долларов США, Чехия 8,25 млрд долларов США, Россия 7,66 млрд долларов США, Швейцария 6,71 млрд долларов США и т. д. На 12 ведущих экспортных рынков приходится более 60% Германии. экспорт.
Машиностроительная промышленность Германии – самая сильная в мире
Машиностроительная промышленность – самая важная отрасль в развитых странах. Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом.
Стоимость экспорта немецких машин и оборудования в 2018 году составила 254,9 млрд долларов США, увеличившись на 9,9% по сравнению с предыдущим годом. Экспорт немецких машин и оборудования в Европу составил 57%, на Азию — 24%, на Северную Америку — около 12%, на другие рынки — около 7%.
Экспорт полупроводников, панельного оборудования и электронного оборудования из Германии в 2018 году составил 2,28 миллиарда долларов США. По сравнению с США, Японией, Нидерландами и т. д. она находится в отсталом положении. Основная причина в том, что в самой Германии отсутствует электронная и полупроводниковая промышленность, поэтому нет промышленности для экспериментов. Исследования и разработки этого типа механического оборудования не могут быть продолжены.
Германия является крупнейшим производителем и экспортером машин и оборудования в мире, особенно в сфере высокотехнологичных машин и оборудования. Технологический и инженерный потенциал Германии, технический персонал, системная интеграция и т. д. занимают лидирующие позиции в мире. Однако в развивающихся высокотехнологичных отраслях, таких как электроника, оптоэлектроника, полупроводники и другие промышленные машины и оборудование, они явно отстают от США и Японии. Основной анализ заключается в том, что в Германии и Европе не хватает таких производственных компаний, а также в развивающихся высокотехнологичных отраслях, в основном в Азии и Северной Америке, и этот тип промышленного оборудования больше подходит для исследований и разработок в Северной Америке и Северо-Восточной Азии.
Современный рынок станков Германии
Станки Германии ориентированы на развитие умных заводов и Индустрию 4.0. на волне Индустрии 4.0 Германия разработала приложения для Интернета вещей и постепенно внедрила их в станкостроение, ускорив процесс интеграции интеллектуальных заводов, приверженных приложениям 5G, 3D-печати металлом и оцифровке производства. во всех направлениях, действительно реализуя сотрудничество человека и машины.
Согласно коммюнике Немецкой ассоциации производителей станков (VDW), тайваньский экспорт в Германию занял десятое место в первой половине 2019 года (60 миллионов евро), увеличившись на 4% по сравнению с тем же периодом 2018 года. на станки приходилось 90% из 54 миллионов евро, а оставшаяся часть приходилась на детали и компоненты, и эти два показателя выросли на 4% и 5% соответственно по сравнению с предыдущим годом. В целом, немецкая станкостроительная промышленность не затронута «торговой войной между США и Китаем», потому что она в основном продается на внутренний рынок в Китае, или не затронута из-за специальных продуктов и высокого технического содержания. Однако необходимо отметить, что внутренний спрос Китая косвенно затронут торговой войной. Замедление роста рынка приводит к последующим проблемам.
COVID-19 повлиял на местную экономическую деятельность в Германии, а также на потребление и покупательную способность населения. Хотя Германия и даже целые европейские страны не прекратили производственную деятельность, большинство производителей станков испытали на себе влияние торговой войны США и Китая и приостановки работ в Китае из-за эпидемии.
В данном ролике представлена работа высокопроизводительной ленточной пилорамы XBE с пилением в две стороны, производства BRENTA LBL и каретки SPIDER.
Высокопроизводительные лесопильные заводы BRENTA. Ленточная пилорама XBE с пилением в две стороны Автоматическая подача не обрезного пиломатериала на кромко-обрезной станок OXIA-Brenta Брусовальная линия CDS-Brenta
Другие группы видео
Выставки
Выставка «ЛесДревМаш 2018» Выставка WOODEX 2019
Ламинирование, каширование, облицовка и окутывание панелей и профиля
Автоподатчик BARBERAN ящичного профиля в линию окутывания Линия BARBERAN для окутывания ящичного профиля Линия по нанесению прозрачных PET пленок на ламинированные панели (№2). Hessan (КНР). Линия по нанесению прозрачных PET пленок на ламинированные панели (№1). Hessan (КНР). Станок для давления структуры на панелях и профилях Станок для давления структуры на погонаже Линия BARBERAN для окутывания пленками с ВЫСОКОГЛЯНЦЕВОЙ отделкой Линия Barberan изготовления и окутывания шпоном L-образного наличника Линия 2-сторонней ламинации панелей, с автоматической подачей панелей и штабелированием готовых панелей. Barberan (Испания). Линия 1-сторонней ламинации панелей, с автоматическим наложением листового и рулонного материала. Barberan (Испания). Линия для ламинации панелей листовым и рулонным материалом ITS. Barberan (Испания). Компактный ламинатор Compact Line. Barberan (Испания). Линия ламинации дверных панелей с использованием клеев ПВА. KL-1400 Barberan (Испания). Линия по окутыванию элементов царговых дверей. Barberan (Испания). Станок для окутывания профилей RP-30-modular. Barberan (Испания).
Лесопильное оборудование
Автоматическая многопильная торцовка Лесопильная линия для коротких полубревен NORTEC (Тайвань) Ленточный делитель тяжелого класса NORTEC (Тайвань) Горизонтальные ленточные пилорамы
Оборудование для производства фасадов
Автоматическая линия V235NC-ALU для торцовки AL профилей (OMGA, Италия) Многофункциональный станок А1 для обработки элементов рамочных фасадов под 90° и 45° с круглым шипом Станок Е45 для обработки элементов рамочных фасадов под 45° с круглым шипом Станок TF2 односторонней обработки элементов рамочных фасадов под 45° с шипом ENDMASTER-P base. line. Пневматический сборочный пресс для фасадов и ящиков Станок для двусторонней обработки элементов рамочных фасадов Rapid 3000 EssePigi (Италия) Электромеханический сборочный пресс для фасадов проходного типа Линия AM3 для автоматической сборки рамочных фасадов различного типа Линия AM1 для автоматической сборки рамочных фасадов Станок для двусторонней обработки элементов рамочных фасадов RAPID 3000 FV3 EssePigi (Италия) Оборудование KOCH для производства рамочных фасадов разного типа
Паркет
Автоматический станок NORTEC с поворотной пилой для паркета Автоматическая линия производства паркетной/инженерной доски Производство паркета с системой «CLICK» Пилорама тонкого распила NORTEC-MM-15 Заточный станок для тонких рамных пил Nortec-MM-10
Сушильные камеры
ООО «КарелЮгЛес» г. Касли ООО «РостАгро» г. Бийск ИП «Денисов ЮА» г. Ульяновск ООО «Ирбис»
Токарные станки
Токарный станок с ЧПУ CENTAURO T-STAR
Оборудование для производства багета, багетных рамок и решеток
Двухсторонний калибровально шлифовальный станок NORTEC Станок для шлифования рельефных поверхностей, модель P6 (2 часть) Станок для шлифования рельефных поверхностей, модель Р6 Профилешлифовальный станок MM-S4 W8 Профилешлифовальный станок MM-S3 W8 Шлифовка и сатинирование металлических заготовок Шлифовка и калибровка фибро-цементных плит Замена шлифовального инструмента на станке Nortec Шлифовальный станок Nortec
Лесопильное оборудование StrojCAD. Словакия
DKP6 Бревнопильный двухдисковый станок углового пиления D9 Автоматический бревнопильный двухдисковый комплекс с интегрированной программой оптимизации раскроя бревен и сортировкой пиломатериала D9 Автоматический бревнопильный двухдисковый комплекс. Цех в Германии.
Высокопроизводительное лесопильное оборудование BRENTA LBL. Франция
Высокопроизводительные лесопильные заводы BRENTA. Ленточная пилорама XBE с пилением в две стороны Автоматическая подача не обрезного пиломатериала на кромко-обрезной станок OXIA-Brenta Брусовальная линия CDS-Brenta
Многопильные станки
Кромкообрезной станок MRS с плавающей пилой Плитный многопил Nortec S-1350-X3 Многопильный станок с неограниченной шириной раскроя Многопильный станок серии UDKD (Ustunkarli)
Покрасочные камеры
Окрасочные камеры ОКВ открытого типа, серия «ПРОФИ»
Линии оптимизации и выборки дефектов
NORTEC S-600 торцовочный станок с серво управлением подачи Линия оптимизации NORTEC (Тайвань) Линии оптимизации и выборки дефектов OMGA T 521 SNC и T 521 OPT Линия оптимизации и выборки дефектов OMGA T 2006 OPT Линия оптимизации и выборки дефектов OMGA Т522 Линия оптимизации и выборки дефектов OMGA T 2020 NC Линии оптимизации чешско-швейцарской производственной компании Stori Mantel Загрузчик для линии оптимизации T 2006 OMGA Линия оптимизации поперечного раскроя с цифровым управл. Supercut 500
Четырехсторонние станки
NORTEC GA-623H со скоростью строгания 150 м/мин Четырехсторонний станок Nortec GS 623 Четырехсторонний станок NORTEC GS 523 Четырёхсторонний станок для строгания КОРОТКИХ ЗАГОТОВОК ОТ 120 мм Четырехсторонние станки серии GS и GN для строгания коротких заготовок с высокой точностью Nortec GA-723-CE с системой PowerLock Высокоскоростной четырехсторонний станок NORTEC с автоматической системой загрузки-выгрузки NORTEC GHХ 1023. Скорость строгания 350 м\мин
Линии сращивания древесины
Полуавтоматическая линия сращивания FJS-20ACH-S (Тайвань) 8 тактов\мин. Полуавтоматическая линия сращивания FJS-20ACH (Тайвань) 4 такта\мин. Автоматическая линия сращивания FJF-20 AH-S (Тайвань) 6 тактов\мин. Работа пресса (8-10 тактов/мин) Автоматическая линия сращивания с одним шипорезом, поворотным столом (сервопривод) Шипорезный станок 25 RCS с поворотным столом (сервопривод) Линия с сервоприводами Автоматическая линия сращивания YNF FJS-20 AH hydraulic (5 тактов/мин) Полуавтоматическая линия сращивания YNF с двумя шипорезами Шипорезный станок 25 RCS с поворотным столом (гидропривод)
Оборудование для производства мебели
Полуавтоматический кромкооблицовочный станок MFB4023 Высокопроизводительный Центр с ЧПУ NA-48P с быстрой сменой инструмента Четырехшпиндельный фрезерный станок с ЧПУ NORTEC 484 Трех-шпиндельный сверлильно-пазовальный станок с ЧПУ Nortec DOM 3 Сверлильно-присадочный станок SCM advance 21 Двухпильный усозарезной станок для багета модели PRISMA MAXI Сверлильно-пазовальный станок Nortec M120 Cверлильно-пазовальный многошпиндельный станок Nortec M33L Фрезерно-копировальный станок NORTEC-1400-AT Автозагрузчик для двустороннего шипорезного станка Автоматический станок для сверления, клеенанесения и забивки шкантов SPRINT-200 Форматно-раскроечный станок SI 400 Nova. SCM (Италия) Фрезерный станок с ЧПУ эконом класса Обрабатывающий центр с ЧПУ Pratix S. SCM (Италия) Обрабатывающий центр с ЧПУ Tech Z5. SCM (Италия) Фуговальный станок F41 elite s Кромкооблицовочный станок ME-25 Кромкооблицовочный станок SCM K400 Кромкооблицовочный станок Olimpic-К 800 Кромкооблицовочный станок Olimpic-К 260 evo
Оборудование для шпона
Станок для дублирования шпона FH-300 (Китай) Ребросклеивающий станок для шпона LINEA1000Plus Станок для дублирование шпона RCN-400/2 Barberan
Оборудование для производства дверей и окон
Линия NORTEC форматирования и профилирования дверных полотен DB – фрезерный станок с ЧПУ со Сверлильным блоком для столярных изделий, дверной коробки. DA – фрезерный станок с ЧПУ для столярных изделий, дверной коробки и дверей Станок для производства телескопического наличника «ЭКОНОМ» (Ульяновск, 2022 г) NORTEC-600A – кромкооблицовочный станок с прифуговкой для дверей с притвором (Тайвань) Станки для телескопического наличника, СЕРИЯ ZT и СЕРИЯ Z с блоком точной торцовки и блоком прифуговки. Производство Турция Centauro Alfa TWIN — на производстве Станок для телескопического наличника, КОМПАКТ. Производство Турция Станок для склеивания планок Станок для телескопического наличника, ПРОФИЛЕР. Производство Турция. Станок для телескопического наличника, ЭКОНОМ. Производство Турция. Электромеханический сборочный пресс для дверей проходного типа Трёхшпиндельный фрезерный станок с ЧПУ NM-483 Станок с ЧПУ RAPID CNC для обработки элементов царговых дверей и дверной коробки Станок для термопечати на кромке панелей, модель NORTEC-7000 Двухсторонний шипорез с блоками сверления в торцы заготовки, NORTEC-46SB NORTEC-350A — кромкооблицовочный станок для дверей с притвором (Тайвань) Faster 1T — фрезерный станок для столярных изделий, окон и дверей Centauro Alfa TWIN — 2-х сторонний фрезерный станок с ЧПУ для столярных изделий, дверей и их элементов Centauro Alfa — фрезерный станок с ЧПУ для столярных деталей, окон и дверей Универсальный станок с ЧПУ HORIZON OMNIA для обработки элементов царговых дверей и дверной коробки Оборудование для производства царговых (сборных) дверей Станок для синхронной двухсторонней обработки дверной панели DOORMATIC Станок для обработки дверных коробок и полотен с ЧПУ. HORIZON PLUS + DOOR PANEL KIT Линия проходного типа для обработки дверных коробок на базе станка с ЧПУ HORIZON PLUS
Окрасочное оборудование KA-MA
Покрасочный станок CEVVAL Кромкошлифовальный станок модели KR KZM 5 Линия УФ покраски панелей с разворотом на 180 градусов Покрасочный станок KR BM 1000 KR BM 1700 (Видео 3) Шлифовальный станок KR YZM 1300 (Видео 2) Шлифовальный станок KR YZM 1300 (Видео 1) KR BM 1700 (Видео 2) KR BM 1700 (Видео 1) Станок для покраски фасадов KR BM 600 KR BM 1700 Линия УФ покраски фасадов Линия УФ покраски дверей
Оборудование для лакирования и печати
Автоматический станок для окраски панелей, модель РРА 1300 (Производство Китай) Линия вальцового нанесения УФ — отверждаемых материалов NORTEC W4 Станок Barberan 3D-Embossing для нанесения декоративной 3D-текстуры Цифровой принтер Barberan JETMASTER-210 Цифровой принтер Barberan JETMASTER-C-420 Цифровой принтер Barberan JETMASTER-630 Линия нанесения высокоглянцевых лаковых покрытий BARBERAN
Прессовое оборудование
Автоматический мембранно-вакуумный пресс Роторный пресс для бруса и щита серия ПГР-3 Гидравлический пресс АНТЕЙ с автоматической загрузкой-выгрузкой Мембранно-вакумный пресс Master Гидравлический пресс для щита с 2-мя рабочими полями ПГВ 2-3000
Оборудование для домостроения
Станок для оцилиндровки бревен Roundtec Линия сращивания Joint Фрезерный станок для склеивания Joint 3020 Дождевой клеенаносящий станок BJ 300 BV MAXI 6-ти осевой центр с ЧПУ Routech OIKOS Многоцелевой центр с ЧПУ TECHNO BLOCK-HOUSE Многоцелевой центр с ЧПУ TECHNO PF Многоцелевой центр с ЧПУ TECHNO PМ Многоцелевой центр с ЧПУ TECHNO TURN Центр с ЧПУ для производства стеновых панелей TECHNO WALL
Оборудование для производства поддонов
Высокопроизводительная линия SMHC, 2000 паллетов в смену Комплексные линии Stori Mantel для производства паллетов Технология SMPT производства негабаритных паллетов Линия для обработки поддонов SMOP
Оборудование для утилизации древесных отходов
Дробилка древесных отходов SG strojrna. Чехия
Видео: Как правильно сварить ленточную пилу
29096 +33
Биржа ProСтанки
Продам Аппараты для аргонодуговой сварки, аргонодуговые сварочные аппараты EWM, Telwin, УДГО, Сварог, ЭлектроИнтел Новый
Санкт-Петербург (Россия)
Добавлено: 15.04.2010 в 14:34 Продолжительность: 05:37
Дядя Леня показал как варятся ленточные пилы. Что для этого нужно? Сварочный аппарат для ленточных пил, гильотина для раскроя ленты, приспособление для зачистки сварного шва. Сначала необходимо зачистить и обезжирить свариваемые концы ленты, затем установить в электроды. Настроить соответствующие режимы сварки. После сварки необходимо отжечь сварной шов. Отжиг это важнейшая операция, правильное выполнение которой будет гарантировать качество шва. После отжига шов зачищается и снова отжигается. Пила готова!
Комментарии
9
Оставить комментарий
Интересные статьи партнеров
Лазерная резка и гравировка алюминия
Какие материалы можно сваривать лазерной сваркой?
3 вида гальванического покрытия для коммерческого использования
Отжиг стали: процесс, виды, преимущества, недостатки и области применения
Будущее станков с ЧПУ
Пусконаладка оптоволоконного лазерного станка по металлу STL-1530FP/2000 Raycus в Йошкар-Оле
Японская техника маркетри Ёсэги-дзайку! Такого вы не видели!
12 необычных способов соединения деревянных заготовок
Металлическая Эйфелева башня изготовленная с помощью обрабатывающего центра с ЧПУ — интересное видео
Похожее видео
Для отправки комментария необходимы Ваши имя и E-mail адрес.
Заработная плата рабочего лесопильного завода Москва, Российская Федерация
Средняя базовая заработная плата
Средняя почасовая ставка
240,25 ₽ (руб.)/час
Средний бонус
6 546 ₽ (руб.)/год
Данные о компенсации, основанные на опыте
Средняя брутто-зарплата рабочего лесопильного завода в Москве, Российская Федерация, составляет 499 711 ₽ или эквивалентная почасовая ставка 240 ₽. Это на 4% выше (+17 272 ₽) средней зарплаты лесопильщиков в РФ. Кроме того, они зарабатывают средний бонус в размере 6 546 ₽. Оценки заработной платы основаны на данных обследования заработной платы, полученных непосредственно от работодателей и анонимных сотрудников в Москве, Российская Федерация. Рабочий лесопилки начального уровня (стаж 1-3 года) получает среднюю зарплату 389 494 ₽. С другой стороны, работник лесопилки старшего уровня (8+ лет опыта) получает среднюю зарплату в размере 599 657 ₽.
Быстрый поиск зарплат в других профессиях и местах в нашей базе данных зарплат.
Название работы
Город, штат, страна или почтовый индекс США
Эта страница является рекламой платформы оценки SalaryExpert и не предназначена для профессионального использования.
Профессионалы должны подписаться на платформу оценки SalaryExpert.
Данные о вознаграждении ERI основаны на опросах о заработной плате, проведенных и изученных ERI. Данные о затратах на оплату труда в серии Assessor основаны на фактических данных о продажах жилья из коммерчески доступных источников, плюс арендные ставки, цены на бензин, расходные материалы, страховые взносы на медицинское обслуживание, налоги на имущество, эффективные ставки подоходного налога и т. д.
Воспользуйтесь нашим профессиональным программным обеспечением для получения подробных отчетов о заработной плате и стоимости жизни.
Попробуйте бесплатную демоверсию стрелка_право
Расчетная заработная плата в 2028 году:
666 207 ₽ (руб.)
5-летнее изменение:
33 %
Основываясь на наших данных о компенсации, расчетный потенциал заработной платы для Рабочий лесопилки увеличится на 33 % в течение 5 лет.
Эта диаграмма отображает самый высокий уровень образования для: Рабочий лесопилки , большинство на 100% со средними школами.
Узнайте, как образование может повлиять на вашу зарплату
Бостон
80,6 %
Денвер
78,5 %
Лос-Анджелес
79. 5 %
Айова
75,5 %
Огайо
76,6 %
Пенсильвания
77,2 %
Чехия
36,6 %
Новая Зеландия
69,4 %
Румыния
0,3 %
Южная Африка
20,2 %
Хорватия
0,1 %
Москва, Российская Федерация
Стоимость жизни в Москве, Российская Федерация, на 26% выше средней стоимости жизни в Российской Федерации. Стоимость жизни рассчитывается на основе накопления стоимости продуктов питания, транспорта, медицинских услуг, арендной платы, коммунальных услуг, налогов и прочего.
Просмотреть страницу стоимости жизни
Москва ( MOS-koh , США в основном MOS-kow ; русский : Москва , тр. Moskva , МФА : [mɐskˈva] (слушать)) — столица и крупнейший город России. Город стоит на берегу Москвы-реки в Центральной России, с населением, по оценкам, 13,0 млн жителей в черте города, более 17 млн жителей в городской местности и более 21,5 млн жителей в столичном регионе. Город занимает площадь 2511 квадратных километров (970 квадратных миль), а городская площадь составляет 5,89 квадратных километров.1 квадратный километр (2275 квадратных миль…
Источник из Википедии
Выгружает бревна из грузовиков или автомобилей и выполняет множество других обязанностей по подготовке бревен к распиловке на пиломатериалы и хранению распиленных пиломатериалов на лесопилке. Читать больше
Сколько вам должны платить?
Рассчитайте свою рыночную зарплату с помощью нашего калькулятора зарплаты.
На данную вакансию не найдено вакансий
Узнайте о наших продуктах
SalaryExpert, основанный на ERI, предоставляет общественности проверенные данные о заработной плате и стоимости жизни с комплексной платформой для оценки решений о компенсации, карьере, переезде и образовании.
Доступ к нашим продуктам для оценки arrow_right
Рабочий лесопилки
Рабочий лесопилки
SalaryExpert, располагающая исследовательской группой с докторской степенью, предоставляет актуальные данные о заработной плате и компенсациях. Загрузите наши бесплатные официальные документы , чтобы узнать больше.
Прогноз национальной компенсации на январь 2023 г.
Результаты исследования удаленной работы, инфляции и воздействия на рабочую силу — осень 2022 г.
Как разработать конкурентоспособную структуру заработной платы
Просмотреть все технические документы
Быстрый поиск зарплат в других профессиях и местах в нашей базе данных зарплат.
Название работы
Город, штат, страна или почтовый индекс США
Эта страница является рекламой платформы оценки SalaryExpert и не предназначена для профессионального использования.
Профессионалы должны подписаться на платформу оценки SalaryExpert.
Данные о вознаграждениях ERI основаны на опросах о заработной плате, проведенных и изученных ERI. Данные о затратах на оплату труда в серии Assessor основаны на фактических данных о продажах жилья из коммерчески доступных источников, плюс арендные ставки, цены на бензин, расходные материалы, страховые взносы на медицинское обслуживание, налоги на имущество, эффективные ставки подоходного налога и т. д.
Воспользуйтесь нашим профессиональным программным обеспечением для получения подробных отчетов о заработной плате и стоимости жизни.
Попробуйте бесплатную демоверсию arrow_right
Бостон
80,6 %
Денвер
78,5 %
Лос-Анджелес
79,5 %
Айова
75,5 %
Огайо
76,6 %
Пенсильвания
77,2 %
Чехия
36,6 %
Новая Зеландия
69,4 %
Румыния
0,3 %
Южная Африка
20,2 %
Хорватия
0,1 %
Узнайте о наших продуктах
SalaryExpert, основанный на ERI, предоставляет общественности проверенные данные о заработной плате и стоимости жизни с комплексной платформой для оценки решений о компенсации, карьере, переезде и образовании.
Доступ к нашим продуктам для оценки arrow_right
Рабочий лесопилки
Рабочий лесопилки
40 Вакансии Baillie Lumber в США
Перейти к основному содержанию
Прошлая неделя (3)
Прошлый месяц (15)
В любое время (40)
Бэйли Пиломатериалы (40)
40 000 долларов США+ (10)
$60 000+ (1)
Дональдс, Южная Каролина (8)
Смирна, Нью-Йорк (6)
Гамбург, Нью-Йорк (5)
Монтесума, Индиана (4)
Искренность, Нью-Йорк (3)
Полный рабочий день (38)
Неполный рабочий день (1)
Стажировка (1)
Стажировка (1)
Начальный уровень (28)
Средний-старший уровень (9)
Представительский (2)
На месте (40)
Получайте уведомления о новых вакансиях Baillie Lumber в США .
Мы изменили дизайн нашего классического почвенного ножа, чтобы сделать его еще лучше! Мы изготавливаем лезвие почвенного ножа Leonard Deluxe из высококачественной нержавеющей стали. Это 6-дюймовое лезвие имеет удлиненную зубчатую кромку с двойным надрезом и встроенную выемку для обрезки шпагата. Мы вытравливаем метки глубины прямо на лезвии. Мы оснащаем нож Leonard Deluxe Soil Knife удобной цельной литой рукояткой из композитного материала. Эта рукоятка имеет более округлую форму и литой упор для большого пальца. Мы также увеличили диаметр отверстия крюка. Почвенный нож Leonard Deluxe из нержавеющей стали хорошо подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает давление более 300 фунтов, поэтому оно справится практически с любой задачей. Почвенный нож Leonard Deluxe — это тот садовый инструмент, без которого вы не сможете обойтись. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку. Выгравированная дюймовая маркировка гарантирует, что ваши растения и луковицы посажены на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и поддерживаем его пожизненная гарантия ! Защитите свой почвенный нож с помощью дополнительных кожаных чехлов 4750S-Leonard . Сэкономьте немного денег, купив оба вместе в 4752COM- Комбинированный нож для почвы Leonard Deluxe и ножны ! Вы также можете заточить свой нож с помощью нашей точилки 4-в-1 для ножей и инструментов 028C- .
ПОДРОБНЕЕ…
Перейти в конец галереи изображений
Перейти в начало галереи изображений
Информация о продукте
Характеристики продукта
Материал лезвия: Нержавеющая сталь
Длина лезвия (дюймы): 6 цвет: оранжевый
Длина ручки (дюймы): 5-3/4
Общая длина (дюймы): 11-3/4
Характеристики продукта
Двулезвийное лезвие из нержавеющей стали
Удлиненная двойная режущая кромка зубчатый край
Встроенная насечка для обрезки шпагата и маркеры глубины
Ярко-оранжевая композитная рукоятка с широким защитным кожухом
Отверстие для крючка большого диаметра в рукоятке
Преимущества продукта
Лезвие сочетает прямую и зубчатую кромки
Зубчатая кромка с двойной насечкой обеспечивает максимально острую кромку
Маркировка лезвия обеспечивает оптимальную глубину посадки
Прорезь позволяет перерезать шпагат и вязальные ленты на ходу и устраняет необходимость замены инструментов
Цельная литая композитная рукоятка обеспечивает удобный захват и улучшает контроль
Более широкий кожух защищает вашу руку
Отверстие в рукоятке позволяет аккуратно повесить нож на стойку для колышков
Дополнительная информация о продукте
Гарантия PFR
На этот продукт распространяется пожизненная гарантия. Пожалуйста, нажмите здесь для получения подробной информации.
Гарантия на продукт
Мы нашли другие продукты, которые могут вам понравиться!
Почвенный нож Leonard Deluxe из нержавеющей стали
5
301 ОтзывНаписать отзыв
Один из наших самых популярных инструментов не просто так!
Мы внесли несколько улучшений в наш классический почвенный нож, и в результате появился почвенный нож Leonard Deluxe! Мы производим лезвие этого фантастического инструмента из высококачественной нержавеющей стали. Это лезвие имеет длину 6 дюймов и имеет расширенную зубчатую кромку с двойным разрезом и встроенную выемку для перерезания шпагата. Мы вытравливаем отметки глубины прямо на лезвии. Мы оснастили нож Leonard Deluxe Soil Knife удобной цельной литой композитной ручкой. Эта рукоятка имеет более округлую форму и литой упор для большого пальца. Мы также увеличили диаметр отверстия крючка. Почвенный нож Leonard Deluxe из нержавеющей стали подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает более 300 фунтов давления, поэтому оно выдерживает практически любую задачу. Почвенный нож Leonard Deluxe быстро станет вашим любимым садовым инструментом. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку. Выгравированная дюймовая маркировка гарантирует, что вы посадите на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и даем на него пожизненную гарантию! Используйте с нашими Кожаный чехол Leonard для надежного хранения почвенного ножа.
Сайт Ledinek использует файлы Cookie для повышения его производительности. При просмотре нашего веб-сайта Вы соглашаетесь на использование файлов Cookie, необходимых для бесперебойной работы сайта, согласие будет автоматически сохранено. Подробное описание файла Сookie.
Воплощение всех наших инноваций
STRATOPLAN S200 / S500 – серьезный станок, не универсал, а воплощение всех наших инноваций и нашего опыта, который позволил заказчику сократить материальные и трудовые затраты с помощью высокопроизводительного оборудования.
Этот сверхмощный строгальный станок был специально разработан для работы при больших нагрузках на строгальных производствах и лесопильных заводах для производства строганного пиломатериала, ламелей и деления заготовок на бруски. Основная задача заключается в том, чтобы мощный и надежный станок мог удовлетворить растущие требования по оптимизации ресурсов.
Стандартно оснащен ножами Kanefusa ST-1:
Наши строгальные головы для прямого строгания оснащены ножами Kanefusa ST-1 Revo
Меньше расход мощности
Выше стойкость ножей
Лучшее качество финишной поверхности
Новое покрытие ножей
KANEFUSA ST-1 Revo
Основные преимущества:
Высота строгания/настройка.
Плавающие вертикальные шпиндели.
Опционально активно плавающий при поддержке серводвигателем вал для уменьшения толщины съема.
Сменная система строгальных валов Ledinek.
Автоматическая настройка для снижения времени простоя во время смены инструмента и ввода данных.
Прямой привод инструментов и подающих роликов.
Сокращение количества компонентов, подлежащих техническому уходу
Преимущества калибрования рейсмус-рейсмус
Система разработана для калибрования досок перед сортировкой и склеиванием после сращивания на минишип, или же в любых случаях, где нужен минимальный съем стружки.
1. Калибрование верхним валом
Доска прижимается сверху ВНИЗ к рабочему столу. Толщина стружки варьируется в зависимости от заданной и актуальной толщины доски.
2. Калибрование нижним валом
Доска прижимается ВВЕРХ, к неподвижной пластине. Проводится окончательное калибрование до заданной толщины доски, с учетом уже сделанного съема на первом шпинделе, поэтому материал снимается на минимальную толщину.
3. Уменьшение толщины доски на входе
Экономьте деньги!
Активно плавающие вертикальные валы с поддержкой серводвигателем
Все строгальные станки Stratoplan модификации VA (с другими модификациями не комбинируется) оснащены активно плавающими вертикальными валами, поддерживаемыми серводвигателями. Каждая доска при приближении к строгальному валу измеряется сенсорами. Одновременно программное обеспечение, разработанное LEDINEK, рассчитывает перемещение вертикальных шпинделей вдоль горизонтальной оси, что позволяет им следовать за изгибом доски.
В зависимости от ширины доски на входе программное обеспечение распределяет толщину съема стружки на обе стороны, таким образом это дает возможность уклонится от параллельного строгания доски. В итоге мы при любых условиях получаем отличное калибрование без излишнего съема стружки.
Комбинируя строгание рейсмус-рейсмус и активно плавающие валы, возможно строгать не параллельно и экономить материал, чего нельзя получить на строгальных станках другого типа.
Сайт Ledinek использует файлы Cookie для повышения его производительности. При просмотре нашего веб-сайта Вы соглашаетесь на использование файлов Cookie, необходимых для бесперебойной работы сайта, согласие будет автоматически сохранено. Подробное описание файла Сookie.
Технология строгания класса премиум от Ledinek
Ledinek RU
Строгание и профилирование
Технология строгания класса премиум от Ledinek.
Полный спектр промышленных строгально-профильных станков. Они более эффективные благодаря инновационным идеям; более производительные не только благодаря мощным двигателям, они оснащены современным программным обеспечением и продуманным интерфейсом для ввода установочных данных; они имеют прочную конструкцию и укомплектованы высококачественными компонентами; проверены временем на практике.
Станки и все фрезерные узлы предназначены для того, чтобы на них работать и нагружать по максимуму.
Строгально-фрезерные линии
Линии выполняются в соответствии с требованиями заказчика, комплектуются строгально-фрезерным станком, околостаночной механизацией, электрокомпонентами и программным обеспечением для управления, комплексное решение от одного поставщика. Оптимизация – сортировка – предварительное строгание — профилирование; для погонажных изделий или конструкционных элементов разных габаритных размеров.
Линия сортировки 250 м/минЛиния строгания и сортировки 300 м/мин
Строгально-фрезерные линии
Superplan
Высокопроизводительный строгально-фрезерный станок для обработки поверхностей финишного качества, а также для получения наиболее распространенных профилей на высоких скоростях подачи.
Superplan S150 / S400Superplan-B S60 / S120
Superplan
Multiplan
Высокопроизводительный многофункциональный станок для эффективного и гибкого производства профильных погонажных изделий с великолепной финишной поверхностью после обработки. Высокоскоростной строгально-фрезерный станок для получения продуктов самого лучшего качества.
Multiplan S150 / S250
Multiplan
Europlan
Универсальный строгально-фрезерный станок для строгания досок и балок, при необходимости возможна быстрая перенастройка.
Europlan 300 / 400 / 600Europlan 1000 / 1300
Europlan
Rotoles
Новая система строгания, являющаяся незаменимой для машинной обработки композитных древесных материалов, идеально подходит, если необходима высокая точность при калибровании заготовок даже с поврежденной поверхностью.
Rotoles D – станок с ленточным транспортеромRotoles S — станок с рольгангом
Rotoles
Splitcut
Делительная пила с двумя вертикальными шпинделями для деления толстых заготовок.
Splitcut 200Splitcut 160
Splitcut
Посадочное оборудование | Прицепные навесные сельскохозяйственные сеялки
Завод для успеха
Компания John Deere предлагает полный ассортимент продукции, учитывающий интересы каждого фермера — культуру, которую вы выращиваете, топографию вашей земли, масштабы вашей деятельности и ваш бюджет. Если вы хотите заменить свою сеялку новой машиной или модернизировать существующую сеялку новыми высевающими секциями, у нас есть посевное оборудование и улучшения производительности, необходимые для успешного посева.
Нарисованные плантаторы
Универсальный. Масштабируемость. Обрабатывайте больше акров благодаря гибкости и производительности даже при нулевой обработке почвы.
Навесные плантаторы
Компактный. Экономичный. № Эти навесные сеялки представляют собой недорогой вариант для посева в обычных условиях и при минимальной обработке почвы.
Сеялки ДБ
Большие акры. Универсальный. Завершите работу быстрее с помощью этих тягловых плантаторов, занимающих много гектаров. Доступны десять конфигураций шириной от 44 до 120 футов.
Сеялки DR
Настраиваемый. Технология складывания стопкой. Назовите свою конфигурацию. Навесные сеялки Deere-Orthman серии DR отличаются универсальностью, позволяющей соответствовать тем особенностям конструкции, которые вам нужны.
Новая сеялка 1725C
Благодаря таким дополнительным функциям, как наш полный агрономический пакет ExactEmerge™ и MaxEmerge™ 5e, увеличенная производительность с 35 до 55 бушелей и складная лестница, обновленная сеялка 1725C предлагает повышенную производительность и удобство. Теперь доступен в 16r30.
Посмотреть сеялку 1725C о новой сеялке 1725C
Система внесения жидких удобрений ExactRate™
Удобряйте по мере посадки – точно . ExactRate — это наше интегрированное решение, устанавливаемое на заводе, которое соответствует возможностям наших сеялок ExactEmerge™ и MaxEmerge™ 5e. Сажайте и вносите питательные вещества со скоростью до 10 миль в час и автоматически регулируйте скорость в соответствии со скоростью движения. Компенсация поворота улучшает размещение питательных веществ вдоль кривых. Индивидуальное управление секциями ряда и компенсация кривой гарантируют, что вы достигнете желаемой нормы по всему полю.
Посмотреть совместимые сеялки Drawn
Посмотреть совместимые сеялки DB о системе внесения жидких удобрений ExactRate™
Компактная сеялка 1745
Идите по узкой дороге к лучшим результатам при уборке урожая. Сеялка 1745 — это небольшая сеялка с раздельными рядами, которая идеально подходит для небольших полей. Его компактная конструкция облегчает транспортировку по узким дорогам.
Сеялка 1745 может помочь вам сэкономить 4,3 % на расходах на семена* и получить дополнительные 10 бушелей на акр.** Вы можете тянуть ее с помощью более старых тракторов меньшего размера, и она складывается всего за 40 секунд.
Посмотреть сеялку 1745 о компактной сеялке 1745
Высевающие секции сеялки и усовершенствования производительности
Подберите к своей сеялке лучшую высевающую секцию, соответствующую вашим потребностям, чтобы улучшить укладку семян, расстояние между ними и всхожесть.
Виртуальный тур John Deere ExactEmerge™
Точность на вашей скорости. Что бы это ни было. Погрузитесь в суть этой революционной технологии и узнайте, чем ExactEmerge отличается от любой другой высевающей секции.
MaxEmerge™ 5 Virtual Tour
Исключительная производительность и простота обслуживания
MaxEmerge™ 5e — высевающая секция с электроприводом
Эта высевающая секция с электроприводом обеспечивает компенсацию кривых и может быть заказана с гидравлической прижимной силой для отдельных рядков, пневматическими заделывающими колесами и легко регулируемые очистители рядков.
Поднимите свою сеялку на новый уровень: Сравните высевающие секцииПросмотр улучшений производительности
Сравните прицепные сеялки
Сравните наши прицепные сеялки
Модели
Количество рядов
Расстояние (дюймы)
Транспортная ширина
Центральная товарная система (CCS)
9091 9090 Рядная секция 90
1775NT 12Row30
12
30
12 футов
100 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
1775НТ 16ряд30
16
30
12 футов
130 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
1775NT 24 ряда 30
24
30
12 футов
130 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
1795 12 рядов, разделенных на 23 или 24
23/12 ИЛИ 24/12
30/15
12 футов, 12 футов 11 дюймов
70 бушелей; 100 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
1795 16-рядное разделение 31 или 32
16/31 или 16/32
30/15
12 футов, 12 футов 11 дюймов
100 бушелей; 130 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
1795 24 ряда20
24
20
12 футов, 12 футов 11 дюймов
100 бушелей; 130 бушелей
ExactEmerge, MaxEmerge 5e, MaxEmerge 5
•
8, 12, 15, 16
15, 20, 30
12 футов 2 дюйма
Н/Д
MaxEmerge 5
1765 гибкий
12
30
15 футов 8 дюймов
Н/Д
MaxEmerge 5
1765 Жесткий
12
30
15 футов 8 дюймов
Н/Д
MaxEmerge 5
1765НТ
6, 8
30
12 футов
Н/Д
MaxEmerge 5
1775 гибкий
12
30
15 футов 2 дюйма
Н/Д
MaxEmerge 5
4, 6, 8
30, 36, 38
13 футов 10 дюймов, 15 футов 8 дюймов, 24 фута
Н/Д
MaxEmerge 5
Нарисованные плантаторы
Конфигурации сеялок DB по индивидуальному заказу
Мы предлагаем сеялки по индивидуальному заказу для тех фермеров, у которых особые требования, выходящие за рамки наших обычных конфигураций. От дорожек до специального количества рядов и интервалов — мы можем удовлетворить ваши потребности. Например, мы предлагаем:
Пятисекционная рама с распределением веса
Расстояние между технологическими дорожками
Специальные запросы на колеса и шины
Специальное количество рядов и интервалы
Пропустить строки
Высевающие секции с электроприводом (ExactEmerge™ и MaxEmerge™ 5e) для сеялок не поставляются с нашего завода
Найти дилера Индивидуальные конфигурации сеялок DB
Известный университет недавно провел исследование с использованием ExactEmerge™ в одном испытании, чтобы определить, есть ли какие-либо негативные последствия для посева на более высоких скоростях. А теперь вы можете сами просмотреть отчет, чтобы убедиться, что мы действительно объединили скорость и точность.
Прочитать исследование об отсутствии ограничения скорости
Дополнительные ресурсы
*Runge, Max, et al. «Технология автоматического управления секциями для пропашных сеялок». Университеты Алабамы A&M и Оберн ANR-2217, октябрь 2014 г.
**Эрик Коронель и Том Мюллер. «Повышает ли полосатость N во время посева или рядом с ним урожайность кукурузы по сравнению с разбрасыванием? Внутренний обзор литературы John Deere, май 2017 г.
Precision Planting | Ag Tech & Agronomy Solutions
Точная посадка | Агротехнические и агрономические решения
Настройте и улучшите уже имеющееся у вас снаряжение.
Введите почтовый индекс или город
Уведомление о защите прав потребителей штата Калифорния (CCPA) при получении
Зарегистрироваться на Зимнюю конференцию 2023
Продукты, повышающие производительность сеялки
Коснитесь каждого кружка, чтобы узнать больше
Раскрыть
Reveal — это очиститель рядков, устанавливаемый на раму, который точно контролирует глубину чистящих пальцев, создавая неизменно чистые и идеальные условия посева для равномерного появления всходов.
Delta Force
DeltaForce — это автоматизированная система контроля прижимной силы, которая измеряет и регулирует прижимную силу каждый раз, когда на вашем поле возникают колебания, чтобы ваши культуры процветали и получали оптимальную урожайность.
vSet
Традиционные высевающие аппараты нуждаются в постоянной регулировке для точного высева, что приводит к пропускам, удвоению и, в конечном счете, к потере урожая. Счетчики семян vSet точно отделяют семена без каких-либо регулировок, что обеспечивает идеальное размещение семян по всему полю.
виртуальный диск
vDrive — это система электропривода, не требующая технического обслуживания, которая позволяет с легкостью выполнять посевные работы без головной боли, связанной с системой механического привода.
СпидТьюб
SpeedTube — это система подачи семян, позволяющая удвоить скорость посева без ущерба для производительности.
vApplyHD
vApplyHD позволяет вам получать правильную дозу жидких удобрений для каждого растения на вашем поле, гарантируя, что ваши растения никогда не будут голодать, а рентабельность инвестиций в удобрения будет максимальной.
Скрыть
Conceal — это приспособление для повышения плодородия сеялки, которое аккуратно вставляется в высевающую секцию и вносит питательные вещества в почву на расстоянии 3 дюймов от семян.
ФерроуДжет
FurrowJet закрепляет семена в борозде, одновременно укладывая полосы удобрений на семена и рядом с ними, чтобы ранние корни могли получать необходимые питательные вещества в нужное время, гарантируя, что растения никогда не будут голодать.
СмартФимер
SmartFirmer — это датчик уплотнения семян, который измеряет количество влаги, доступной для семян, поэтому вы можете правильно отрегулировать глубину заделки и быть уверенным, что у вас будет постоянный рост урожая.
Умная глубина
SmartDepth позволяет быстро и легко регулировать глубину из кабины при изменении условий. Это экономит ваше время и дает вам уверенность в том, что каждая строка установлена именно там, где вам нужно.
борозды
FurrowForce — это двухступенчатая система закрытия, которая адаптируется к условиям посадки, удаляя воздушные карманы и твердую почву, сохраняя влагу.
Сотрудничайте с дилером системы точного высева
Дилер системы точной посадки будет вашим партнером в течение всего сезона, предоставляя рекомендации, поддержку и обучение.
Запланировать оценку оборудования
Дилер точной посадки встретится с вами и оценит ваше оборудование для посадки и уборки урожая.
Получите индивидуальный план обновления
Ваш дилер предложит вам лучший способ максимизировать ваши инвестиции.
Получите постоянное обучение и поддержку
Это только начало. Ваш дилер подготовит вас к использованию простой технологии и будет поддерживать вас в течение всего сезона.
Найти дилера
Присоединяйтесь к нам и посмотрите
Примите участие в мероприятии Precision Planting, чтобы получить максимальную отдачу от вашего оборудования и урожая.


 Пускатели Р1 и Р2, отключаются, при этом нормально закрытый блок-контакт Р1 замыкается, срабатывает пускатель РЗ и на обмотки электродвигателя Ml подается постоянный ток — происходит динамическое торможение.
Пускатели Р1 и Р2, отключаются, при этом нормально закрытый блок-контакт Р1 замыкается, срабатывает пускатель РЗ и на обмотки электродвигателя Ml подается постоянный ток — происходит динамическое торможение.
 При этом золотник сообщает с насосом обе полости цилиндра одновременно. Вследствие разности создаваемых усилий, поршень движется в сторону штоковой полости — суппорт совершает рабочий ход.
При этом золотник сообщает с насосом обе полости цилиндра одновременно. Вследствие разности создаваемых усилий, поршень движется в сторону штоковой полости — суппорт совершает рабочий ход.
 Программа включает свыше 10 пил для самых различных случаев применения. Номинальная потребляемая мощность в зависимости от модели варьируется от 1350 Вт до 2200 Вт. Можно выбрать пильные полотна диаметров от 216 мм до 315 мм, от этого зависит максимальная ширина и высота детали. Большая торцовочная и усорезная пила KGS 315 Plus обеспечивает ширину реза 320 мм при глубине реза 120 мм, если пильное полотно установлено под углом 90°. Конечно, с использованием функции протяжки, которая интегрирована практически во все модели торцовочных пил. Для мобильного применения мы рекомендуем компактные легковесы с рукояткой для переноски, которые вряд ли весят больше 10 кг. Единственной в своем роде является пила KGSV 72 Xact SYM, представляющая собой комбинацию панельной и реечной пилы с симметрично переставляемой системой упора. Реальный прогресс в операциях точного распиливания с экономией времени для специалистов по укладке напольных покрытий.
Программа включает свыше 10 пил для самых различных случаев применения. Номинальная потребляемая мощность в зависимости от модели варьируется от 1350 Вт до 2200 Вт. Можно выбрать пильные полотна диаметров от 216 мм до 315 мм, от этого зависит максимальная ширина и высота детали. Большая торцовочная и усорезная пила KGS 315 Plus обеспечивает ширину реза 320 мм при глубине реза 120 мм, если пильное полотно установлено под углом 90°. Конечно, с использованием функции протяжки, которая интегрирована практически во все модели торцовочных пил. Для мобильного применения мы рекомендуем компактные легковесы с рукояткой для переноски, которые вряд ли весят больше 10 кг. Единственной в своем роде является пила KGSV 72 Xact SYM, представляющая собой комбинацию панельной и реечной пилы с симметрично переставляемой системой упора. Реальный прогресс в операциях точного распиливания с экономией времени для специалистов по укладке напольных покрытий. Стандартной функцией является также наклон пильной рамы, в некоторых моделях даже вправо и влево. Косые резы, криволинейные пропилы и комбинированные распилы/резы возможны без каких-либо проблем. При наличии торцовочной пилы с регулированием числа оборотов можно при соответствующей скорости вращения без проблем распиливать алюминий и пластик. Встроенный лазер для ведения реза и выдвижные расширения стола, являются для Metabo стандартным оборудованием так же, как и возможность отсасывания стружки. Другие свойства указаны в описании отдельных изделий.
Стандартной функцией является также наклон пильной рамы, в некоторых моделях даже вправо и влево. Косые резы, криволинейные пропилы и комбинированные распилы/резы возможны без каких-либо проблем. При наличии торцовочной пилы с регулированием числа оборотов можно при соответствующей скорости вращения без проблем распиливать алюминий и пластик. Встроенный лазер для ведения реза и выдвижные расширения стола, являются для Metabo стандартным оборудованием так же, как и возможность отсасывания стружки. Другие свойства указаны в описании отдельных изделий. Для распиливания длинных деталей в подставке для торцовочных пил KSU 401 можно вытянуть опорную поверхность на ширину до 4 метров.
Для распиливания длинных деталей в подставке для торцовочных пил KSU 401 можно вытянуть опорную поверхность на ширину до 4 метров. 0077 обрезает Мэйпл Лифс 5 ноября.
0077 обрезает Мэйпл Лифс 5 ноября.
 Мнения, выраженные в примерах, не отражают точку зрения Merriam-Webster или ее редакторов. Отправьте нам отзыв.
Мнения, выраженные в примерах, не отражают точку зрения Merriam-Webster или ее редакторов. Отправьте нам отзыв. Словарь Merriam-Webster.com , Merriam-Webster, https://www.merriam-webster.com/dictionary/trimming. По состоянию на 28 декабря 2022 г.
Словарь Merriam-Webster.com , Merriam-Webster, https://www.merriam-webster.com/dictionary/trimming. По состоянию на 28 декабря 2022 г. com.
com.


 14 получаем L = 549.5мм делим ее на наш шаг 5мм и получаем соотношение (редукцию) 110 — что это — это если бы редуктор вращать ШД любой из нашей оси то за один оборот ШД на поверхности заготовки в диаметре 175мм будет пройден отрезок в 5мм — получаются точно тикие-же параметры как и у нашего станка , НО !!! есть и второй вариант событий !
14 получаем L = 549.5мм делим ее на наш шаг 5мм и получаем соотношение (редукцию) 110 — что это — это если бы редуктор вращать ШД любой из нашей оси то за один оборот ШД на поверхности заготовки в диаметре 175мм будет пройден отрезок в 5мм — получаются точно тикие-же параметры как и у нашего станка , НО !!! есть и второй вариант событий !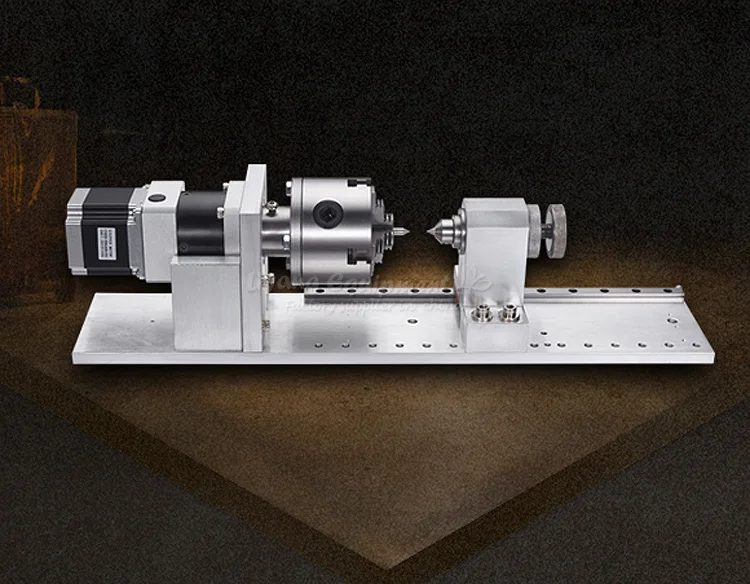 1 до 5.0 на диаметре от 0 до 250мм — но об этом позже !!!)
1 до 5.0 на диаметре от 0 до 250мм — но об этом позже !!!)
 — он копеечный !
— он копеечный ! …
…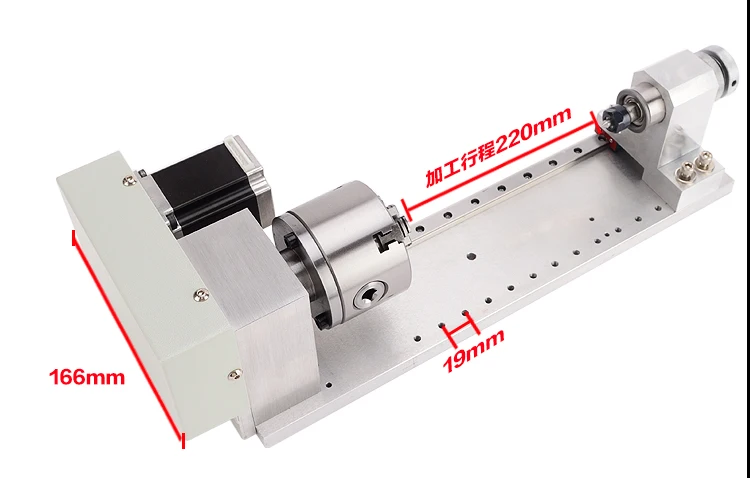 1 — 0.3 мм поработал осью Y по всей длине 900мм — (выявился перекос осей в 1 мм т.е токарный патрон оказался ниже бабки — но не беда (я уже выше описывал данный способ о выравнивании портала) берем 1 мм листовой нерж сталь и изготовил прокладку по всему контору редуктора с токарным шпинделем) — установив ее под редуктор и еще раз проверив все — все несовпадения осей сошли на нет !
1 — 0.3 мм поработал осью Y по всей длине 900мм — (выявился перекос осей в 1 мм т.е токарный патрон оказался ниже бабки — но не беда (я уже выше описывал данный способ о выравнивании портала) берем 1 мм листовой нерж сталь и изготовил прокладку по всему контору редуктора с токарным шпинделем) — установив ее под редуктор и еще раз проверив все — все несовпадения осей сошли на нет !
 Данная операция позволяет свести оси в центр рисунка. А дополнительные нужны, чтобы на них отображать положительные тики.
Данная операция позволяет свести оси в центр рисунка. А дополнительные нужны, чтобы на них отображать положительные тики.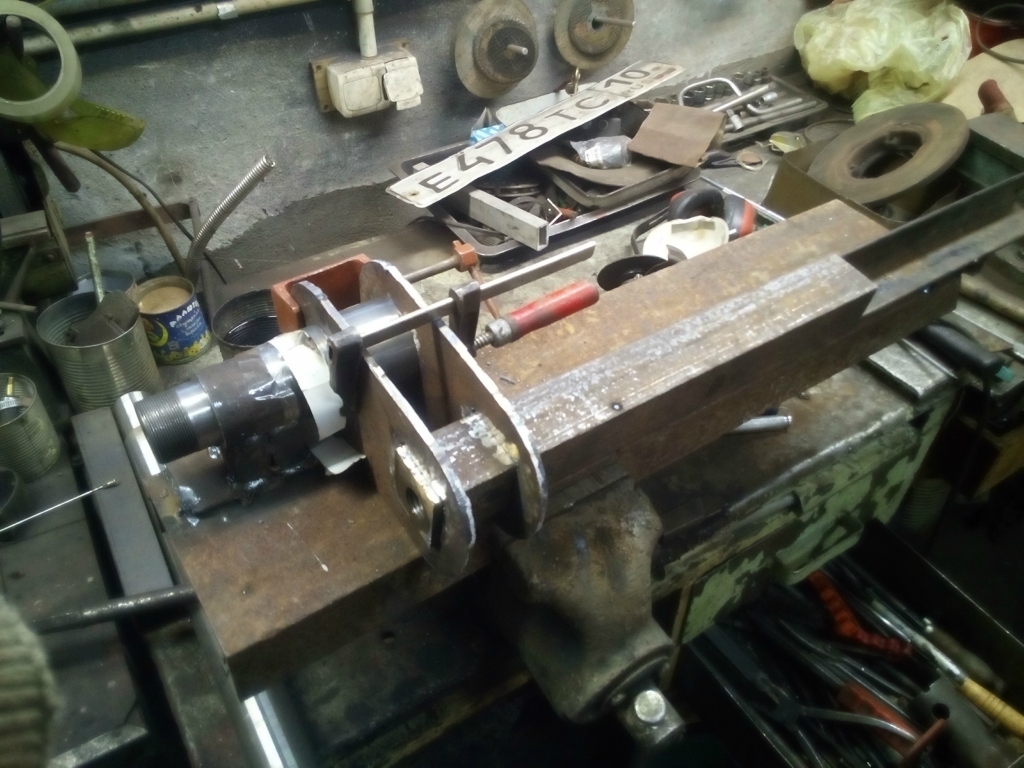 5,0.25 mirror
5,0.25 mirror 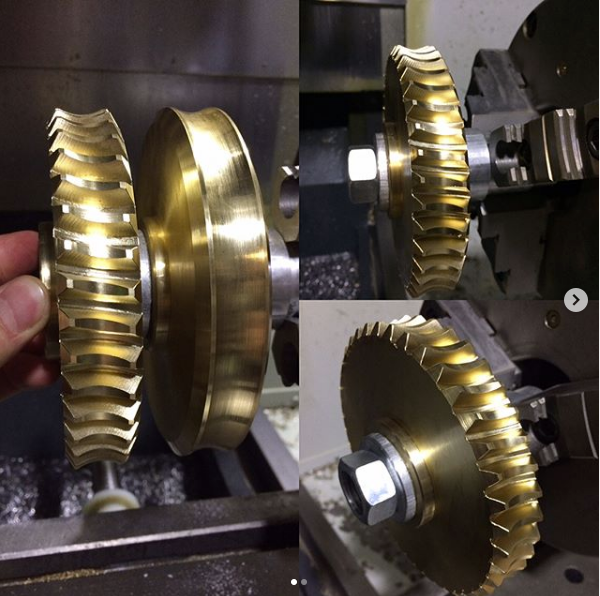 Номер строки — номер оси, пятая строка, чтобы замкнуть контур. Нечетная колонка — координата
Номер строки — номер оси, пятая строка, чтобы замкнуть контур. Нечетная колонка — координата  5
min = -max
set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35 font 'LiberationSerif, 20
set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set xrange [ min : max ]
set yrange [ min : max ]
set x2range [ max : min ]
set y2range [ max : min ]
set label "H_1" at 0, max center offset char 2, 0 font 'LiberationSerif, 23'
set label "H_2" at max+0.1, 0 center offset char -1, 1 font 'LiberationSerif, 23'
set label "H_3" at 0, min center offset char -2, 0 font 'LiberationSerif, 23'
set label "H_4" at min, 0 center offset char 0, 1 font 'LiberationSerif, 23'
set style line 1 linetype 1 pointtype 7 linewidth 3 linecolor black
set style line 2 linetype 2 pointtype 7 linewidth 3 linecolor black
plot 'data.
5
min = -max
set xtics axis 0,.5,max in scale 0.5,0.25 mirror norotate autojustify offset 0.35 font 'LiberationSerif, 20
set ytics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set x2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set y2tics axis .5,.5,max in scale 0.5,0.25 mirror norotate autojustify font 'LiberationSerif, 20
set xrange [ min : max ]
set yrange [ min : max ]
set x2range [ max : min ]
set y2range [ max : min ]
set label "H_1" at 0, max center offset char 2, 0 font 'LiberationSerif, 23'
set label "H_2" at max+0.1, 0 center offset char -1, 1 font 'LiberationSerif, 23'
set label "H_3" at 0, min center offset char -2, 0 font 'LiberationSerif, 23'
set label "H_4" at min, 0 center offset char 0, 1 font 'LiberationSerif, 23'
set style line 1 linetype 1 pointtype 7 linewidth 3 linecolor black
set style line 2 linetype 2 pointtype 7 linewidth 3 linecolor black
plot 'data. csv' using 1:2 title "1" w lp ls 1 ,\
'data.csv' using 3:4 title "2" w lp ls 2
csv' using 1:2 title "1" w lp ls 1 ,\
'data.csv' using 3:4 title "2" w lp ls 2
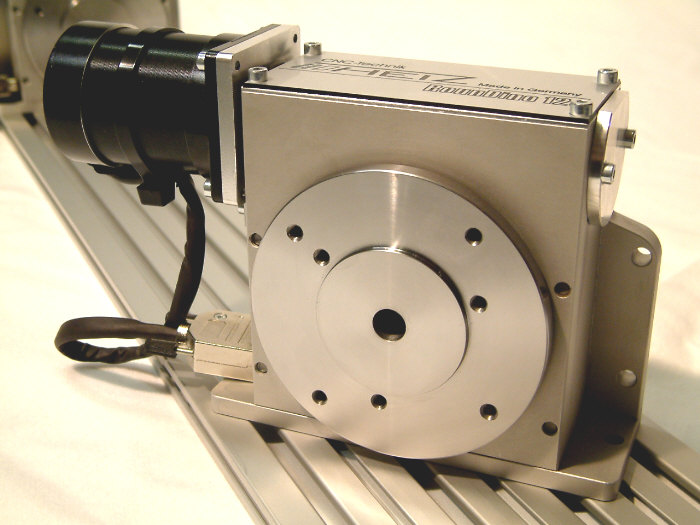 Для компактности я выбрал один из их блоков CSD (CSD-25-100-2A-GR-SP), который имеет общую длину всего 17 мм и внешний диаметр 85 мм. Номинальный крутящий момент для этой модели составляет 47 Нм при 2000 об/мин, с ограничением 110 Нм для повторного крутящего момента.
Для компактности я выбрал один из их блоков CSD (CSD-25-100-2A-GR-SP), который имеет общую длину всего 17 мм и внешний диаметр 85 мм. Номинальный крутящий момент для этой модели составляет 47 Нм при 2000 об/мин, с ограничением 110 Нм для повторного крутящего момента. Например, для выбранного мной привода крутящий момент 10 Нм на выходе приводит к крутильному смещению 76 угловых секунд. Это линейное смещение 28 микрон при радиусе 75 мм. Это означает, что мы можем выполнять только очень легкую обработку или очень маленькие детали…
Например, для выбранного мной привода крутящий момент 10 Нм на выходе приводит к крутильному смещению 76 угловых секунд. Это линейное смещение 28 микрон при радиусе 75 мм. Это означает, что мы можем выполнять только очень легкую обработку или очень маленькие детали… Поскольку цель этого «тормоза» состоит в том, чтобы зафиксировать 2 поверхности вместе, а не на самом деле ломать (то есть, поверхности скользят вместе), я не ожидаю слишком много проблем с износом или истиранием алюминиевых поверхностей. Но я могу ошибаться, и если я новый диск и корпус можно легко сделать из разных материалов.
Поскольку цель этого «тормоза» состоит в том, чтобы зафиксировать 2 поверхности вместе, а не на самом деле ломать (то есть, поверхности скользят вместе), я не ожидаю слишком много проблем с износом или истиранием алюминиевых поверхностей. Но я могу ошибаться, и если я новый диск и корпус можно легко сделать из разных материалов. Как только стальная пластина приклеится к стальному подшипниковому блоку, ток можно уменьшить вдвое (около 1,2 А), чтобы не перегреть и не сжечь катушку. На практике это достигается включением резистора последовательно с катушкой через реле задержки.
Как только стальная пластина приклеится к стальному подшипниковому блоку, ток можно уменьшить вдвое (около 1,2 А), чтобы не перегреть и не сжечь катушку. На практике это достигается включением резистора последовательно с катушкой через реле задержки.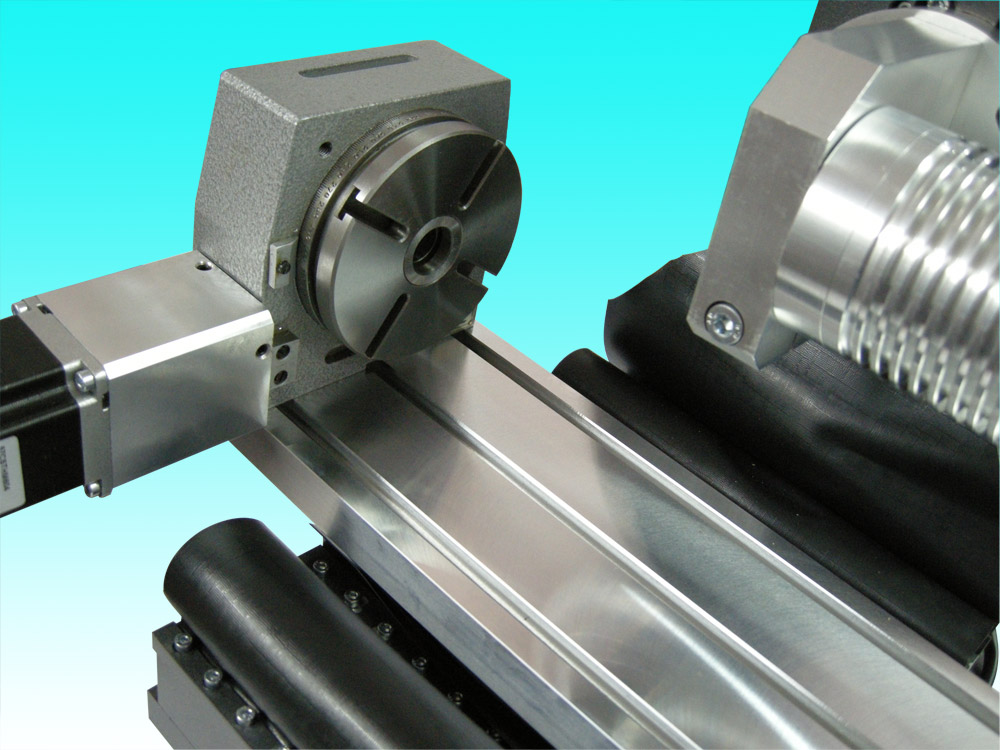 02.2020 в 12:01
02.2020 в 12:01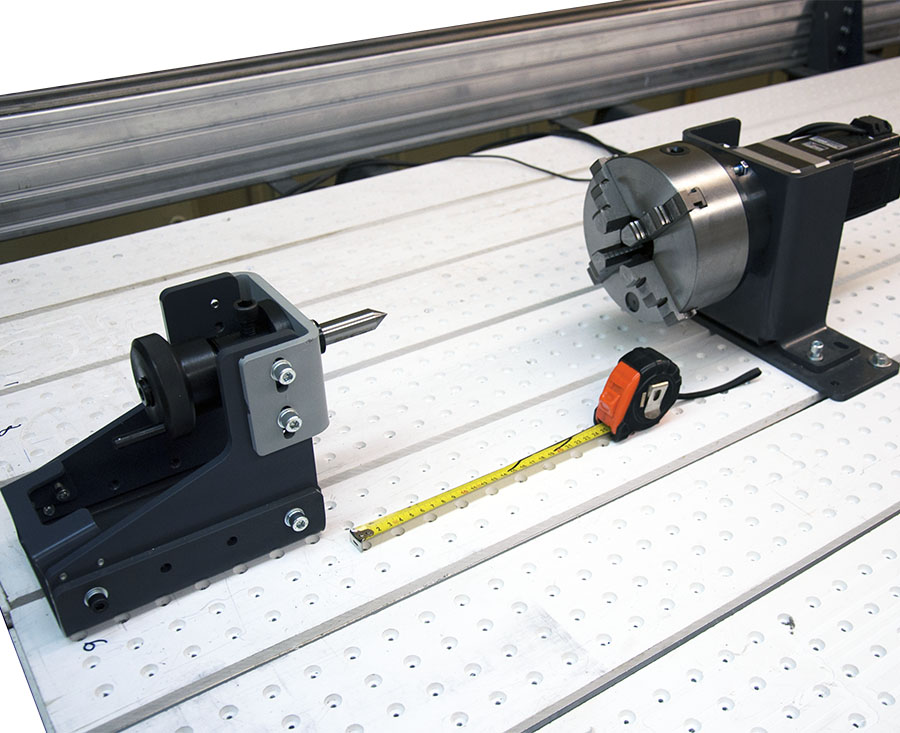 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01 02.2020 в 12:01
02.2020 в 12:01
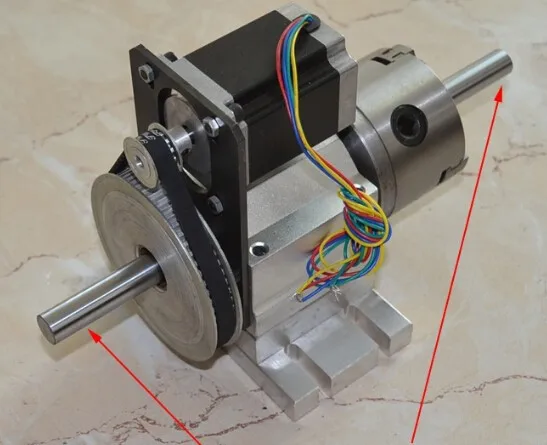

 Бензиновая техника Хускварна подходит и для дома, и для профессионального использования – благоустройства территорий парков, скверов, а также для коммунальных служб.
Бензиновая техника Хускварна подходит и для дома, и для профессионального использования – благоустройства территорий парков, скверов, а также для коммунальных служб.

 8 л.с. подходит не только для бытового применения, но и для работы в коммунальных хозяйствах и других профессиональных сферах. За счет увеличенных оборотов и значительной энерговооруженности он способен срезать кусты и небольшие деревья, и по отзывам покупателей, в большинстве случаев, даже не требуется открывать газ полностью. Помимо этого, бензотриммер оснащен системой предварительной очистки воздуха, сохраняющей основной фильтр в чистоте даже после продолжительной работы. И очень удобной разгрузкой, полностью нивелирующей большую массу инструмента.
8 л.с. подходит не только для бытового применения, но и для работы в коммунальных хозяйствах и других профессиональных сферах. За счет увеличенных оборотов и значительной энерговооруженности он способен срезать кусты и небольшие деревья, и по отзывам покупателей, в большинстве случаев, даже не требуется открывать газ полностью. Помимо этого, бензотриммер оснащен системой предварительной очистки воздуха, сохраняющей основной фильтр в чистоте даже после продолжительной работы. И очень удобной разгрузкой, полностью нивелирующей большую массу инструмента. Их веские преимущества – высокая мобильность, легкость, а отсутствие бензинового двигателя упростило обслуживание до элементарного.
Их веские преимущества – высокая мобильность, легкость, а отсутствие бензинового двигателя упростило обслуживание до элементарного. Управляется триммер всего тремя кнопками, которые расположены на удобной рукоятке корпуса, а идеальная развесовка и малый вес позволяют работать даже одной рукой.
Управляется триммер всего тремя кнопками, которые расположены на удобной рукоятке корпуса, а идеальная развесовка и малый вес позволяют работать даже одной рукой.

 от Хускварна.
от Хускварна.
 01 hp
01 hp с.
с. .
.

 каждая из осей. Их можно связать с системой искусственного зрения, которая позволяет им корректировать движения.
каждая из осей. Их можно связать с системой искусственного зрения, которая позволяет им корректировать движения. Это шарнирно-сочлененная рука, способная переносить объект из одного места в другое, вдохновленная телеоператорами, использовавшимися в ядерной промышленности в 1950-х годах для манипулирования радиоактивными элементами.
Это шарнирно-сочлененная рука, способная переносить объект из одного места в другое, вдохновленная телеоператорами, использовавшимися в ядерной промышленности в 1950-х годах для манипулирования радиоактивными элементами.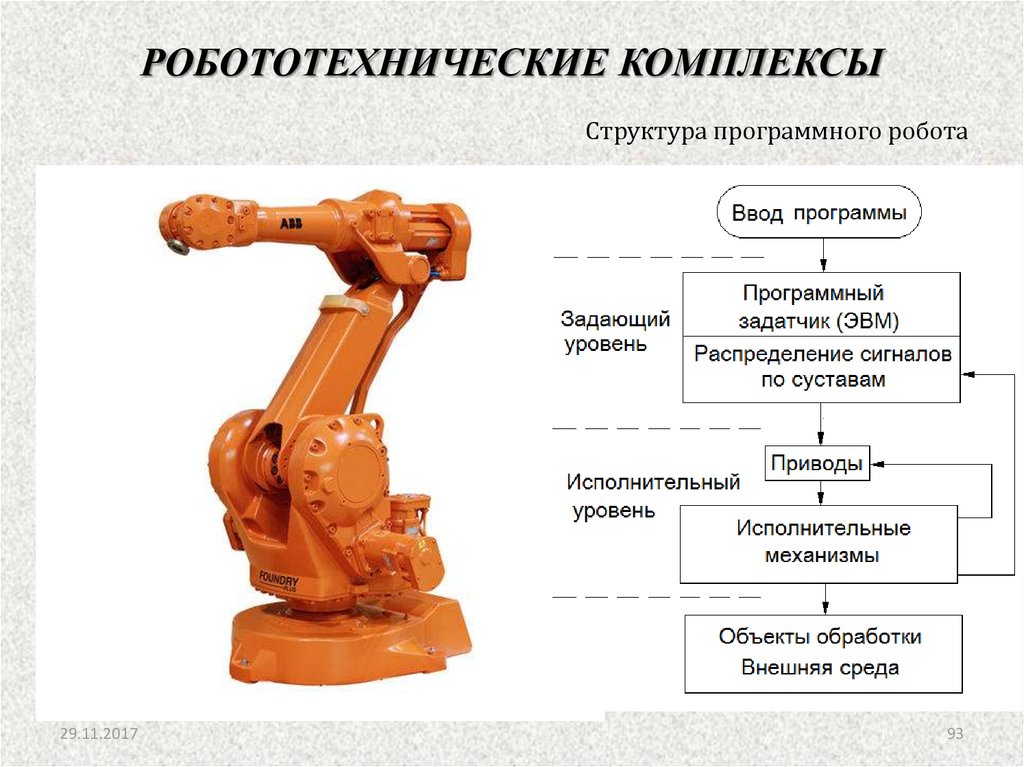 , а три года спустя продала ее Stäubli .
, а три года спустя продала ее Stäubli .
 Искусственный интеллект является важным фактором в промышленной робототехнике.
Искусственный интеллект является важным фактором в промышленной робототехнике.
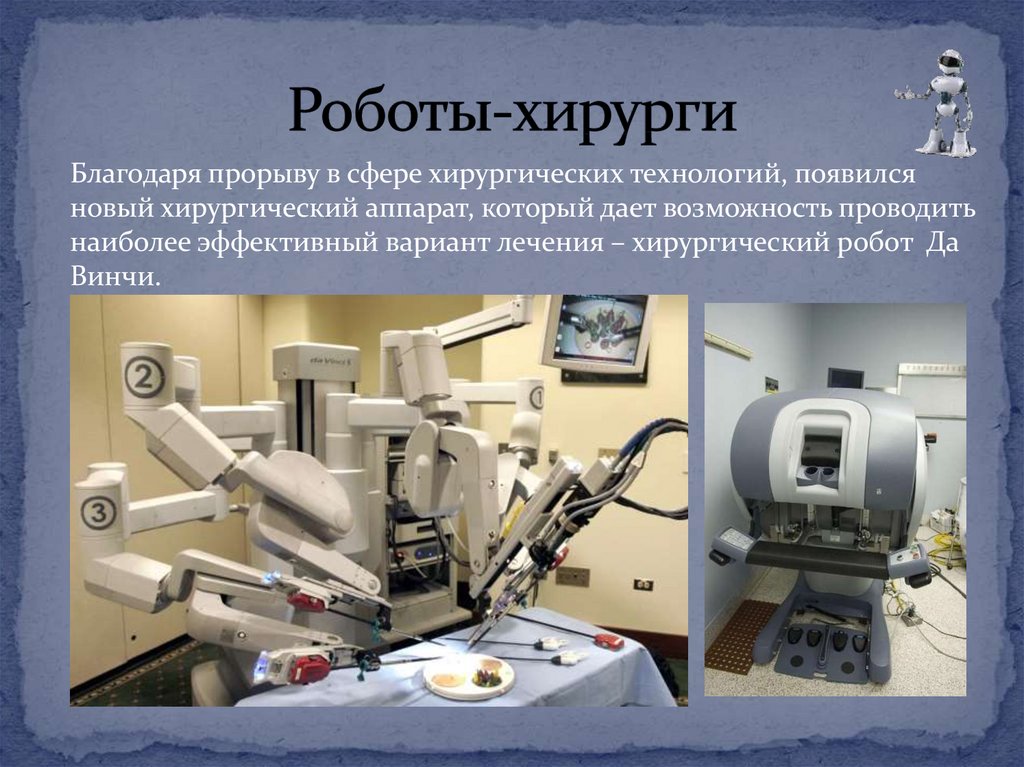 В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации.
В двухмерной среде достаточно 3 осей: 2 для движения, 1 для ориентации. Это делается непосредственно на роботе с помощью блока управления.
Это делается непосредственно на роботе с помощью блока управления.


 )
) fanuc.eu (по состоянию на 14 ноября 2020 г. )
fanuc.eu (по состоянию на 14 ноября 2020 г. )
 Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время.
Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время. промышленная робототехника;
промышленная робототехника;
 Некоторые из них очень популярны и находятся в очень хорошей степени технологической зрелости, а некоторые существуют в единичном экземпляре: в мире миллионы роботов-пылесосов и лишь один действующий робот-планетоход (Марсоход Curiosity является роботом, согласно IFR).
Некоторые из них очень популярны и находятся в очень хорошей степени технологической зрелости, а некоторые существуют в единичном экземпляре: в мире миллионы роботов-пылесосов и лишь один действующий робот-планетоход (Марсоход Curiosity является роботом, согласно IFR). (ISO 8373)
(ISO 8373)
 Кроме того, производители роботов и системные интеграторы все чаще поставляют гибкие рабочие ячейки со стандартной конфигурацией, которые можно быстро интегрировать в существующие производственные системы для стандартных приложений.
Кроме того, производители роботов и системные интеграторы все чаще поставляют гибкие рабочие ячейки со стандартной конфигурацией, которые можно быстро интегрировать в существующие производственные системы для стандартных приложений. .
. При эффективном использовании они позволяют компаниям стать или оставаться конкурентоспособными. Это особенно важно для предприятий малого и среднего бизнеса (МСП), которые составляют основу экономики как развитых, так и развивающихся стран. Это также позволяет крупным компаниям повысить свою конкурентоспособность за счет более быстрой разработки и поставки продукции. Более широкое использование роботов также позволяет компаниям в странах с высокими издержками «перебазировать» или возвращать на свои внутренние базовые части цепочки поставок, которые они ранее передавали на аутсорсинг источникам более дешевой рабочей силы.
При эффективном использовании они позволяют компаниям стать или оставаться конкурентоспособными. Это особенно важно для предприятий малого и среднего бизнеса (МСП), которые составляют основу экономики как развитых, так и развивающихся стран. Это также позволяет крупным компаниям повысить свою конкурентоспособность за счет более быстрой разработки и поставки продукции. Более широкое использование роботов также позволяет компаниям в странах с высокими издержками «перебазировать» или возвращать на свои внутренние базовые части цепочки поставок, которые они ранее передавали на аутсорсинг источникам более дешевой рабочей силы. Другая группа охватывает роботов, предназначенных для совместного использования, которые не удовлетворяют требованиям ISO 10218-1. Это не означает, что эти роботы небезопасны. Они могут соответствовать различным стандартам безопасности, например, национальным или внутренним стандартам.
Другая группа охватывает роботов, предназначенных для совместного использования, которые не удовлетворяют требованиям ISO 10218-1. Это не означает, что эти роботы небезопасны. Они могут соответствовать различным стандартам безопасности, например, национальным или внутренним стандартам. На другом конце спектра находятся промышленные роботы, специально предназначенные для совместной работы с людьми в общем рабочем пространстве. Часто называемые «коботами», эти роботы имеют множество технических характеристик, которые гарантируют, что они не причинят вреда, когда рабочий вступает в прямой контакт, преднамеренно или случайно. Эти функции включают в себя легкие материалы, закругленные контуры, набивку, «кожу» (набивку со встроенными датчиками) и датчики на основании или суставах робота, которые измеряют и контролируют силу и скорость и гарантируют, что они не превышают определенные пороговые значения в случае контакта.
На другом конце спектра находятся промышленные роботы, специально предназначенные для совместной работы с людьми в общем рабочем пространстве. Часто называемые «коботами», эти роботы имеют множество технических характеристик, которые гарантируют, что они не причинят вреда, когда рабочий вступает в прямой контакт, преднамеренно или случайно. Эти функции включают в себя легкие материалы, закругленные контуры, набивку, «кожу» (набивку со встроенными датчиками) и датчики на основании или суставах робота, которые измеряют и контролируют силу и скорость и гарантируют, что они не превышают определенные пороговые значения в случае контакта. Интерфейсы программирования будут становиться все более интуитивно понятными не только для коботов, но и для традиционных промышленных роботов.
Интерфейсы программирования будут становиться все более интуитивно понятными не только для коботов, но и для традиционных промышленных роботов.
 в час.
в час.
 Современные автоматизированные системы выходят за рамки механизации с добавлением искусственного и машинного обучения.
Современные автоматизированные системы выходят за рамки механизации с добавлением искусственного и машинного обучения. Разница между BPA и RPA невелика: BPA похож на замену человеческой производственной линии автономной фабрикой, а RPA — на добавление робота для совместной работы, который будет работать вместе с существующей рабочей силой.
Разница между BPA и RPA невелика: BPA похож на замену человеческой производственной линии автономной фабрикой, а RPA — на добавление робота для совместной работы, который будет работать вместе с существующей рабочей силой.
 Добавляя к этим системам возможности Индустрии 4.0, промышленная автоматизация также может включать доступ к периферийным данным для дальнейшей оптимизации операций на основе данных в реальном времени.
Добавляя к этим системам возможности Индустрии 4.0, промышленная автоматизация также может включать доступ к периферийным данным для дальнейшей оптимизации операций на основе данных в реальном времени. 80-е годы.
80-е годы.
 В результате увеличения производства роботов также увеличилась доступность необходимых навыков для их проектирования, установки, эксплуатации и обслуживания. Кроме того, повышенная доступность программного обеспечения сократила связанные с этим время и риски проектирования, в то же время сделав программирование роботов намного проще и дешевле.
В результате увеличения производства роботов также увеличилась доступность необходимых навыков для их проектирования, установки, эксплуатации и обслуживания. Кроме того, повышенная доступность программного обеспечения сократила связанные с этим время и риски проектирования, в то же время сделав программирование роботов намного проще и дешевле. Это приведет к тому, что роботы будут использоваться в таких областях, как сельское хозяйство, где автоматизированным системам сложно найти, оценить и собрать урожай. Роботизированная точность — еще одна область, в которой в будущем должны быть достигнуты успехи, поскольку она позволяет выполнять более сложные задачи с улучшенной координацией.
Это приведет к тому, что роботы будут использоваться в таких областях, как сельское хозяйство, где автоматизированным системам сложно найти, оценить и собрать урожай. Роботизированная точность — еще одна область, в которой в будущем должны быть достигнуты успехи, поскольку она позволяет выполнять более сложные задачи с улучшенной координацией.
 Эти задачи могут быть как физическими, так и виртуальными, и для их выполнения могут использоваться роботы. Робототехника — это процесс разработки и использования роботов (конкретно) для определенной функции, которая может или не может быть автоматизирована.
Эти задачи могут быть как физическими, так и виртуальными, и для их выполнения могут использоваться роботы. Робототехника — это процесс разработки и использования роботов (конкретно) для определенной функции, которая может или не может быть автоматизирована.

 Спрашивайте!
Спрашивайте! 
 Необходимо знать назначение машины, чтобы обеспечить ее стабильное функционирование.
Необходимо знать назначение машины, чтобы обеспечить ее стабильное функционирование.


 Пермь,
Пермь,
 Пермь, ул. Хрустальная 8а
Пермь, ул. Хрустальная 8а 1. для переключателей WIKA
1. для переключателей WIKA





 ) по готовым чертежам заказчика.
) по готовым чертежам заказчика.
 Резьбонакатный инструмент.
Резьбонакатный инструмент. На Тайване работают более 1000 таких предприятий.
На Тайване работают более 1000 таких предприятий.
 Что касается производства простых изделий, то оно постепенно было перенесено в материковый Китай, который Тайвань обеспечивает новейшей техникой и технологиями. В этом отношении Тайвань является очень хорошей платформой для модернизации отечественных производственных мощностей.
Что касается производства простых изделий, то оно постепенно было перенесено в материковый Китай, который Тайвань обеспечивает новейшей техникой и технологиями. В этом отношении Тайвань является очень хорошей платформой для модернизации отечественных производственных мощностей. ) по готовым чертежам заказчика.
) по готовым чертежам заказчика.
 Бесплатно в комплекте с оборудованием
Бесплатно в комплекте с оборудованием Теперь любой сотрудник компании может быстро и качесвтенно получить информацию и распечатать нужные ему справки, например справку 2НДФЛ или расчетный лист прямо с киоска! Вот она настоящая автоматизация!
Теперь любой сотрудник компании может быстро и качесвтенно получить информацию и распечатать нужные ему справки, например справку 2НДФЛ или расчетный лист прямо с киоска! Вот она настоящая автоматизация! Г. Суткового города ЧЕЛЯБИНСКА
Г. Суткового города ЧЕЛЯБИНСКА Кингисеппа
Кингисеппа
 Покупкой очень довольны. Хотя, стоимость достаточно высокая, но оно того стоит. В стоимость входило несколько образовательных программ для детей от 3-х лет до 5-ти «Я расту». Экран очень яркий, ребенку все прекрасно видно под любым углом. Корпус не имеет острых углов. Моя внучка с большой радостью занимается, результат от занятий уже есть. Определенно удачная покупка. Оставляю свой отзыв для выражения благодарности специалистам за желание понять и помочь.
Покупкой очень довольны. Хотя, стоимость достаточно высокая, но оно того стоит. В стоимость входило несколько образовательных программ для детей от 3-х лет до 5-ти «Я расту». Экран очень яркий, ребенку все прекрасно видно под любым углом. Корпус не имеет острых углов. Моя внучка с большой радостью занимается, результат от занятий уже есть. Определенно удачная покупка. Оставляю свой отзыв для выражения благодарности специалистам за желание понять и помочь.  МЫ ВАШИ СПЕЦИАЛИСТЫ ПО ЗАКУПКАМ РЕЗЕРВУАРОВ, КОГДА БЕЗОПАСНОСТЬ, ОБСЛУЖИВАНИЕ И ДОЛГОВЕЧНОСТЬ ЯВЛЯЮТСЯ ГЛАВНЫМИ ПРИОРИТЕТАМИ.
МЫ ВАШИ СПЕЦИАЛИСТЫ ПО ЗАКУПКАМ РЕЗЕРВУАРОВ, КОГДА БЕЗОПАСНОСТЬ, ОБСЛУЖИВАНИЕ И ДОЛГОВЕЧНОСТЬ ЯВЛЯЮТСЯ ГЛАВНЫМИ ПРИОРИТЕТАМИ. Наша приверженность успеху вашего проекта не имеет себе равных. Мы не поставщик танков, мы партнер проекта.
Наша приверженность успеху вашего проекта не имеет себе равных. Мы не поставщик танков, мы партнер проекта. Имея впечатляющую сеть отраслевых партнеров, мы обеспечиваем бесперебойную работу всех компонентов проекта. Когда вы сотрудничаете с PPE Tanks, мы делаем тяжелую работу, чтобы ваш проект резервуара был выполнен правильно.
Имея впечатляющую сеть отраслевых партнеров, мы обеспечиваем бесперебойную работу всех компонентов проекта. Когда вы сотрудничаете с PPE Tanks, мы делаем тяжелую работу, чтобы ваш проект резервуара был выполнен правильно.
 0003
0003 Мы можем провести вас через проект, порекомендовать правильную смолу и применение, которое является подходящим, рентабельным и, самое главное, безопасным.
Мы можем провести вас через проект, порекомендовать правильную смолу и применение, которое является подходящим, рентабельным и, самое главное, безопасным. Мы вас прикрыли.
Мы вас прикрыли.
 В итоге мы выиграли проект».
В итоге мы выиграли проект». 00″,
00″, guitarcenter.com/img/cmn/c.gif»,
guitarcenter.com/img/cmn/c.gif», gc»,
gc», com/is/image/MMGS7/Slim-Travel-Kit-Tripod-Aluminum-Aluminum/L76045000001000-00-60×60.jpg»,
com/is/image/MMGS7/Slim-Travel-Kit-Tripod-Aluminum-Aluminum/L76045000001000-00-60×60.jpg», guitarcenter.com/img/cmn/c.gif»,
guitarcenter.com/img/cmn/c.gif», США5
США5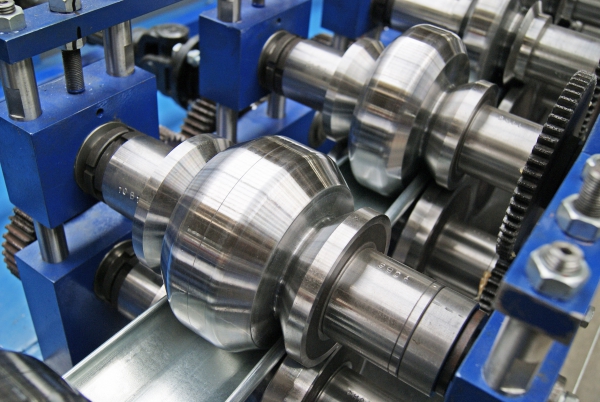 jpg»,
jpg»,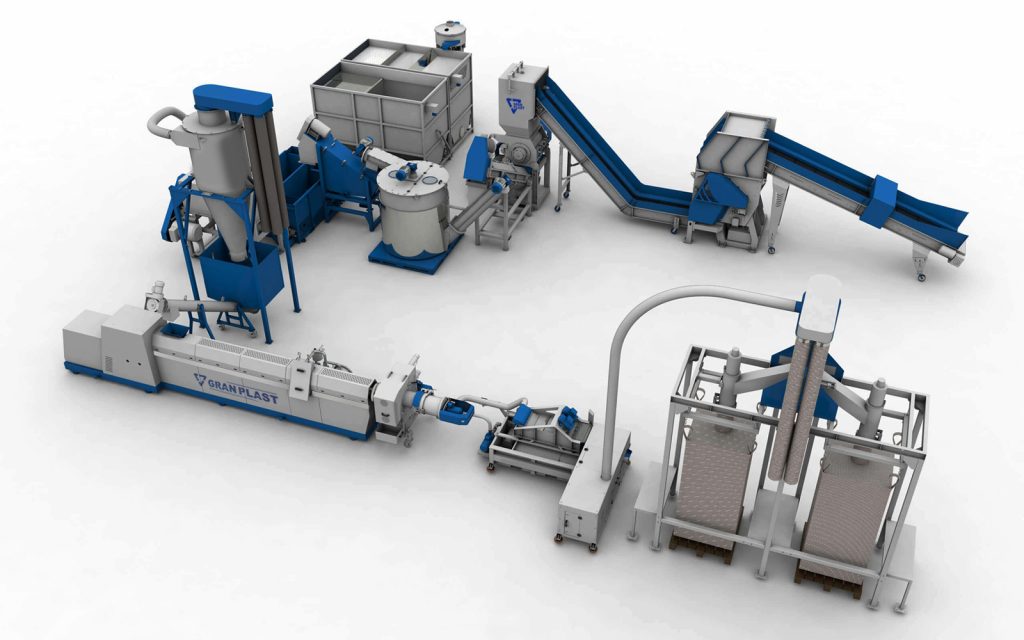 0,низкаяЦена:999.0
0,низкаяЦена:999.0  jpg»,
jpg»,
 0,низкаяЦена:895.0
0,низкаяЦена:895.0  ..
.. 00″,
00″, 5 для Canon EF»,
5 для Canon EF», США
США 5 Cine для Canon EF»,
5 Cine для Canon EF», ..
.. ..
.. guitarcenter.com/img/cmn/c.gif»,
guitarcenter.com/img/cmn/c.gif»,
 Это позволяет снизить энергоемкость производства и затраты на техобслуживание оборудования.
Это позволяет снизить энергоемкость производства и затраты на техобслуживание оборудования.
 Это обеспечивает наша запатентованная установка удаления нижнего подрезного слоя массива. Линия PLUS характеризуется компактным расположением оборудования и простой эффективной упаковкой.
Это обеспечивает наша запатентованная установка удаления нижнего подрезного слоя массива. Линия PLUS характеризуется компактным расположением оборудования и простой эффективной упаковкой. Возьмем на себя смелость оценить число реальных производств, закупающих какое-либо оборудование очень приблизительно в 10 тыс. ( в данном случае точная цифра не так важна).
Возьмем на себя смелость оценить число реальных производств, закупающих какое-либо оборудование очень приблизительно в 10 тыс. ( в данном случае точная цифра не так важна). Появляются фабрики, сопоставимые по оснащенности с европейскими.
Появляются фабрики, сопоставимые по оснащенности с европейскими.
 0 с заметным ростом рынка с 2015 по 2019 год.
0 с заметным ростом рынка с 2015 по 2019 год.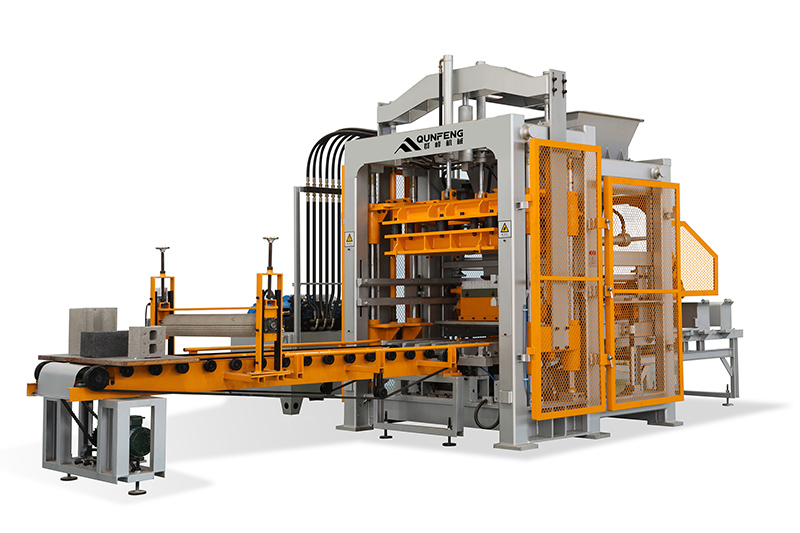 Комплексные сборочные решения остаются крупнейшим сегментом отрасли.
Комплексные сборочные решения остаются крупнейшим сегментом отрасли. 0 в автомобильной промышленности, таких как данные в реальном времени и человеко-машинные интерфейсы.
0 в автомобильной промышленности, таких как данные в реальном времени и человеко-машинные интерфейсы.

 Будучи самой развитой в мире станкостроительной страной, правительство Германии всегда придавало большое значение важному стратегическому положению станкостроительной промышленности, а также как фундаментальным научным исследованиям, так и исследованиям в области прикладных технологий.
Будучи самой развитой в мире станкостроительной страной, правительство Германии всегда придавало большое значение важному стратегическому положению станкостроительной промышленности, а также как фундаментальным научным исследованиям, так и исследованиям в области прикладных технологий. Население Соединенных Штатов составляет 327,16 миллиона человек, а национальный доход составляет 62 850 долларов США на человека в год. Население Японии составляет 126,23 миллиона человек, а национальный доход составляет 41 340 долларов США на человека в год.
Население Соединенных Штатов составляет 327,16 миллиона человек, а национальный доход составляет 62 850 долларов США на человека в год. Население Японии составляет 126,23 миллиона человек, а национальный доход составляет 41 340 долларов США на человека в год. приходилось 7,3%, а на пятерку вместе взятых приходилось около 6 В объеме торговли.
приходилось 7,3%, а на пятерку вместе взятых приходилось около 6 В объеме торговли. На долю машиностроения в Германии приходилось 48% обрабатывающей промышленности.
На долю машиностроения в Германии приходилось 48% обрабатывающей промышленности.
 Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Отрасль машин и оборудования должна поддерживать обрабатывающую промышленность страны в целом. Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Промышленность машин и оборудования в Германии можно разделить на более чем 30 продуктов, из которых более 100 продуктов находятся в середине и тысячи продуктов подкатегорий и т. д.
Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Отрасль машин и оборудования должна поддерживать обрабатывающую промышленность страны в целом. Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Промышленность машин и оборудования в Германии можно разделить на более чем 30 продуктов, из которых более 100 продуктов находятся в середине и тысячи продуктов подкатегорий и т. д. Кроме того, оборудование для пластмасс и резины, текстильное оборудование, насосы, деревообрабатывающее оборудование, системы двигателей, горнодобывающее оборудование, оборудование для всего завода, роботы и автоматизация, компрессорные и вакуумные системы, прецизионные инструменты, технологии контроля и испытаний, технологии печати и изготовления бумаги и т. д. ., есть представители пола.
Кроме того, оборудование для пластмасс и резины, текстильное оборудование, насосы, деревообрабатывающее оборудование, системы двигателей, горнодобывающее оборудование, оборудование для всего завода, роботы и автоматизация, компрессорные и вакуумные системы, прецизионные инструменты, технологии контроля и испытаний, технологии печати и изготовления бумаги и т. д. ., есть представители пола. Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Германия также является крупнейшим в мире экспортером машин и оборудования.
Согласно данным из развитых стран, таких как Германия, Япония и США, промышленность машин и оборудования является основой, поддерживающей обрабатывающую промышленность страны в целом. Германия также является крупнейшим в мире экспортером машин и оборудования. Экспортная стоимость оборудования для пищевых продуктов и упаковки составила 8,29 долл. США.млрд евро, что составляет 5,3%. Экспорт станков составил 9,18 млрд евро, что составляет 5,9%. На эти восемь отраслей может приходиться около половины экспорта.
Экспортная стоимость оборудования для пищевых продуктов и упаковки составила 8,29 долл. США.млрд евро, что составляет 5,3%. Экспорт станков составил 9,18 млрд евро, что составляет 5,9%. На эти восемь отраслей может приходиться около половины экспорта. Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Самое главное — это экспорт на мировой рынок. Немецкую промышленность машин и оборудования можно разделить на более чем 30 продуктов, половина из которых экспортирует левые и правые позиции на первое место в мире, а некоторые продукты занимают второе место в мире.
Производственный бизнес страны зависит от промышленности машин и оборудования для повышения своей конкурентоспособности. Самое главное — это экспорт на мировой рынок. Немецкую промышленность машин и оборудования можно разделить на более чем 30 продуктов, половина из которых экспортирует левые и правые позиции на первое место в мире, а некоторые продукты занимают второе место в мире. д. такие как текстильное оборудование составило 18,5%, точные инструменты — 16,1%, клапаны и фитинги — 13,8%, энергетические системы — 12,8%, сварочные технологии — 12,5%, воздушные перевозки — 11,1% и т. д. Все шесть отраслей занимали важные позиции в мире.
д. такие как текстильное оборудование составило 18,5%, точные инструменты — 16,1%, клапаны и фитинги — 13,8%, энергетические системы — 12,8%, сварочные технологии — 12,5%, воздушные перевозки — 11,1% и т. д. Все шесть отраслей занимали важные позиции в мире. Вторая стоимость экспорта гидравлического оборудования составила 22,4 миллиарда долларов США, что составляет 8,8% от общего объема экспорта. Третья стоимость экспорта химического оборудования составила 20,3 млрд долларов США, что составляет 8,0%. Ю Исю стоит 19 долларов.миллиардов механических компонентов, что составляет 7,5%.
Вторая стоимость экспорта гидравлического оборудования составила 22,4 миллиарда долларов США, что составляет 8,8% от общего объема экспорта. Третья стоимость экспорта химического оборудования составила 20,3 млрд долларов США, что составляет 8,0%. Ю Исю стоит 19 долларов.миллиардов механических компонентов, что составляет 7,5%. 4,08 миллиарда долларов США, полупроводниковое и панельное оборудование — 2,28 миллиарда долларов США, а деревообрабатывающее оборудование было экспортировано. Он также представлен стоимостью 2,06 миллиарда долларов США.
4,08 миллиарда долларов США, полупроводниковое и панельное оборудование — 2,28 миллиарда долларов США, а деревообрабатывающее оборудование было экспортировано. Он также представлен стоимостью 2,06 миллиарда долларов США. Третий объем французского экспорта составляет 16,7 млрд долларов США, что составляет 6,6%, увеличившись на 8,6% по сравнению с предыдущим годом. Экспорт Yu Yisequ в Великобританию составляет 13,6 млрд долларов США, что составляет 5,4%. Экспорт в Италию составил 11,7 млрд долларов, что составляет 4,6%. Экспорт в Нидерланды составляет 11,2 млрд долларов США, что составляет 4,4%. Экспорт в Австрию составил 10,9млрд долларов США, Польша 10,7 млрд долларов США, Испания 8,64 млрд долларов США, Чехия 8,25 млрд долларов США, Россия 7,66 млрд долларов США, Швейцария 6,71 млрд долларов США и т. д. На 12 ведущих экспортных рынков приходится более 60% Германии. экспорт.
Третий объем французского экспорта составляет 16,7 млрд долларов США, что составляет 6,6%, увеличившись на 8,6% по сравнению с предыдущим годом. Экспорт Yu Yisequ в Великобританию составляет 13,6 млрд долларов США, что составляет 5,4%. Экспорт в Италию составил 11,7 млрд долларов, что составляет 4,6%. Экспорт в Нидерланды составляет 11,2 млрд долларов США, что составляет 4,4%. Экспорт в Австрию составил 10,9млрд долларов США, Польша 10,7 млрд долларов США, Испания 8,64 млрд долларов США, Чехия 8,25 млрд долларов США, Россия 7,66 млрд долларов США, Швейцария 6,71 млрд долларов США и т. д. На 12 ведущих экспортных рынков приходится более 60% Германии. экспорт.
 д. занимают лидирующие позиции в мире. Однако в развивающихся высокотехнологичных отраслях, таких как электроника, оптоэлектроника, полупроводники и другие промышленные машины и оборудование, они явно отстают от США и Японии. Основной анализ заключается в том, что в Германии и Европе не хватает таких производственных компаний, а также в развивающихся высокотехнологичных отраслях, в основном в Азии и Северной Америке, и этот тип промышленного оборудования больше подходит для исследований и разработок в Северной Америке и Северо-Восточной Азии.
д. занимают лидирующие позиции в мире. Однако в развивающихся высокотехнологичных отраслях, таких как электроника, оптоэлектроника, полупроводники и другие промышленные машины и оборудование, они явно отстают от США и Японии. Основной анализ заключается в том, что в Германии и Европе не хватает таких производственных компаний, а также в развивающихся высокотехнологичных отраслях, в основном в Азии и Северной Америке, и этот тип промышленного оборудования больше подходит для исследований и разработок в Северной Америке и Северо-Восточной Азии.

 2шт), С8069
2шт), С8069 Это 6-дюймовое лезвие имеет удлиненную зубчатую кромку с двойным надрезом и встроенную выемку для обрезки шпагата. Мы вытравливаем метки глубины прямо на лезвии. Мы оснащаем нож Leonard Deluxe Soil Knife удобной цельной литой рукояткой из композитного материала. Эта рукоятка имеет более округлую форму и литой упор для большого пальца. Мы также увеличили диаметр отверстия крюка. Почвенный нож Leonard Deluxe из нержавеющей стали хорошо подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает давление более 300 фунтов, поэтому оно справится практически с любой задачей. Почвенный нож Leonard Deluxe — это тот садовый инструмент, без которого вы не сможете обойтись. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку.
Это 6-дюймовое лезвие имеет удлиненную зубчатую кромку с двойным надрезом и встроенную выемку для обрезки шпагата. Мы вытравливаем метки глубины прямо на лезвии. Мы оснащаем нож Leonard Deluxe Soil Knife удобной цельной литой рукояткой из композитного материала. Эта рукоятка имеет более округлую форму и литой упор для большого пальца. Мы также увеличили диаметр отверстия крюка. Почвенный нож Leonard Deluxe из нержавеющей стали хорошо подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает давление более 300 фунтов, поэтому оно справится практически с любой задачей. Почвенный нож Leonard Deluxe — это тот садовый инструмент, без которого вы не сможете обойтись. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку. Выгравированная дюймовая маркировка гарантирует, что ваши растения и луковицы посажены на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и поддерживаем его пожизненная гарантия !
Выгравированная дюймовая маркировка гарантирует, что ваши растения и луковицы посажены на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и поддерживаем его пожизненная гарантия ! Пожалуйста, нажмите здесь для получения подробной информации.
Пожалуйста, нажмите здесь для получения подробной информации. Почвенный нож Leonard Deluxe из нержавеющей стали подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает более 300 фунтов давления, поэтому оно выдерживает практически любую задачу. Почвенный нож Leonard Deluxe быстро станет вашим любимым садовым инструментом. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку. Выгравированная дюймовая маркировка гарантирует, что вы посадите на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и даем на него пожизненную гарантию! Используйте с нашими Кожаный чехол Leonard для надежного хранения почвенного ножа.
Почвенный нож Leonard Deluxe из нержавеющей стали подходит практически для любой задачи. Используйте его для посадки луковиц, цветов и трав. Его острая как бритва кромка аккуратно разрезает корни растений, сорняки, шпагат или растительные шпагаты. Он также хорошо подходит для разделения растений, выкапывания камней и очистки трещин на тротуаре или тротуаре. Лезвие выдерживает более 300 фунтов давления, поэтому оно выдерживает практически любую задачу. Почвенный нож Leonard Deluxe быстро станет вашим любимым садовым инструментом. Его удлиненная зубчатая кромка с двойным вырезом обеспечивает максимально острую кромку. Выгравированная дюймовая маркировка гарантирует, что вы посадите на нужной глубине. Встроенная выемка для обрезки шпагата позволяет обрезать шпагат и маркировку растений без необходимости менять инструменты. Цельная литая рукоятка обеспечивает удобный захват для копания в течение всего дня. Мы разрабатываем этот инструмент так, чтобы он прослужил вам долгие годы, и даем на него пожизненную гарантию! Используйте с нашими Кожаный чехол Leonard для надежного хранения почвенного ножа.

 При просмотре нашего веб-сайта Вы соглашаетесь на использование файлов Cookie, необходимых для бесперебойной работы сайта, согласие будет автоматически сохранено. Подробное описание файла Сookie.
При просмотре нашего веб-сайта Вы соглашаетесь на использование файлов Cookie, необходимых для бесперебойной работы сайта, согласие будет автоматически сохранено. Подробное описание файла Сookie. Оптимизация – сортировка – предварительное строгание — профилирование; для погонажных изделий или конструкционных элементов разных габаритных размеров.
Оптимизация – сортировка – предварительное строгание — профилирование; для погонажных изделий или конструкционных элементов разных габаритных размеров.

 Теперь доступен в 16r30.
Теперь доступен в 16r30. Его компактная конструкция облегчает транспортировку по узким дорогам.
Его компактная конструкция облегчает транспортировку по узким дорогам. От дорожек до специального количества рядов и интервалов — мы можем удовлетворить ваши потребности. Например, мы предлагаем:
От дорожек до специального количества рядов и интервалов — мы можем удовлетворить ваши потребности. Например, мы предлагаем: правый, 55/70/100 буш. CCS
правый, 55/70/100 буш. CCS правый, 55/70/100 буш. CCS
правый, 55/70/100 буш. CCS А теперь вы можете сами просмотреть отчет, чтобы убедиться, что мы действительно объединили скорость и точность.
А теперь вы можете сами просмотреть отчет, чтобы убедиться, что мы действительно объединили скорость и точность.