Виды режимов работы оборудования: 3 Режимы работы технологического оборудования и электроприводов атк
3 Режимы работы технологического оборудования и электроприводов атк
План лекции
1.
Основные режимы работы технологического
оборудования
2.
Основные режимы работы электроприводов
3.1
Основные
режимы работы технологического
оборудования
Любой
технологический процесс, связанный с
производством материалов и изделий,
стремятся, руководствуясь экономической
целесообразностью, сделать непрерывным.
В соответствии с этим
технологические
комплексы и агрегаты могут длительное
время работать непрерывно. Примерами
непрерывных технологических комплексов
являются бумаго- и картоноделательные
машины, непрерывные станы холодной
прокатки, конвейерные линии многих
производств и др. Соответственно агрегаты
и механизмы этих комплексов работают
в
непрерывном
режиме. Наряду с этим многие
технологические агрегаты и их механизмы
работают в циклическом режиме со
сменой скоростей и нагрузок. В их работе
В их работе
могут быть перерывы. Такие агрегаты и
механизмы называются агрегатами и
механизмами
циклического
действия. К ним относятся разнообразные
подъемно-транспортные машины (мостовые,
козловые краны), экскаваторы,
металлообрабатывающие станки,
промышленные манипуляторы и др. Среди
механизмов выделяются механизмы
циклического и условно циклического
режимов. Последние работают с изменяющимися
параметрами цикла (ускорения, скорости,
время от цикла к циклу). Имеются и
механизмы кратковременного
режима работы, выполняющие, как правило,
вспомогательные функции.
Режимы работы
комплексов, агрегатов и механизмов
учитываются при выборе автоматизированных
электроприводов и систем управления с
точки зрения реализации заданных
технологических функций и соответствия
номинальным режимам работы
электродвигателей.
3.2 Основные режимы работы электроприводов
Под
номинальным
режимом работы электродвигателя
понимается режим, который был
предусмотрен для электродвигателя
предприятием-изготовителем.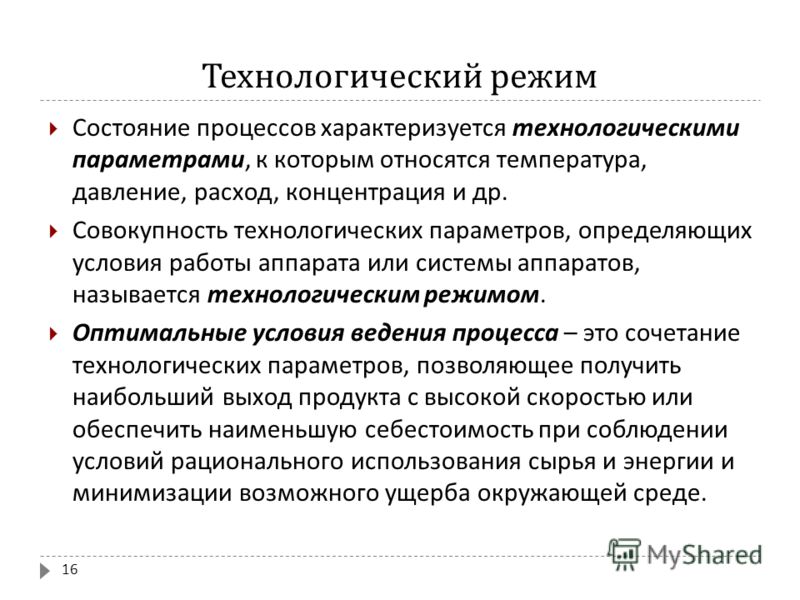 Для
Для
этого режима в каталогах и паспорте
двигателя указываются: номинальная
полезная механическая мощность на
валу; номинальное напряжение; номинальный
ток; номинальная частота вращения или
номинальная угловая скорость;
номинальный КПД; номинальный коэффициент
мощности.
В
соответствии со стандартом установлено
восемь номинальных режимов работы
электрических машин, которые имеют
условные обозначения S1
…S8.
Соответствующие
этим режимам диаграммы изменения
нагрузки М
(полезного механического момента на
валу двигателя), мощности тепловых
потерь
Рт
и температуры
показаны на рисунках 3.1, 3.2. Режимы
определяются следующим образом.
S1
–
режим продолжительной нагрузки:
работа при
постоянной нагрузке, достаточно
длительная для достижения
теплового равновесия, т.е. температура
всех частей электрической машины
достигает установившегося значения
mах.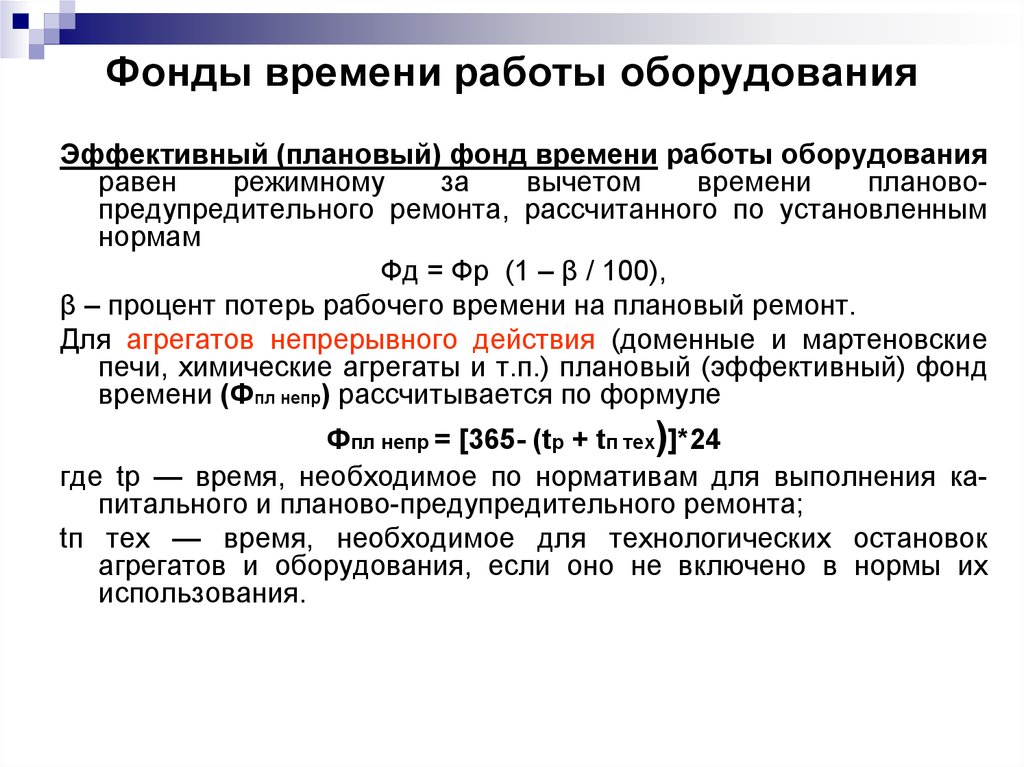
S2
–
режим кратковременной нагрузки:
работа при постоянной нагрузке в течение
заданного времени, меньшего, чем требуется
для получения теплового равновесия, с
последующим отключенным неподвижным
состоянием, имеющим достаточную
продолжительность для достижения
машиной температуры окружающей среды
0.
Характерным параметром является
продолжительность кратковременной
работы, предпочтительные значения
которой составляют 10; 30; 60 и 90 мин.
Рисунок 3.1
S3
– режим
повторно-кратковременной нагрузки:
последовательность идентичных рабочих
циклов, каждый из которых состоит из
периодов работы при постоянной нагрузке
и отключенного неподвижного состояния;
длительность этих периодов недостаточна
для достижения теплового равновесия
за время одного рабочего цикла, а наличие
пускового тока существенно не влияет
на нагревание.
Для
режима S3
характерным параметром является
относительная продолжительность
работы ПВ = (tР/Tц)100
%, где tр
– период работы при номинальных
условиях; Tц
= tР
+ t0
– продолжительность цикла; t0
– период отключенного состояния
(паузы). Предпочтительными являются
следующие значения относительной
продолжительности работы: 15; 25; 40 и 60 %.
Продолжительность одного цикла (если
нет других указаний) принимается равной
10 мин.
S4
–
режим повторно-кратковременной нагрузки,
включая пуск:
последовательность идентичных рабочих
циклов, каждый из которых состоит из
периодов пуска, работы при постоянной
нагрузке и отключенного неподвижного
состояния; длительность этих периодов
недостаточна для достижения теплового
равновесия за время рабочего цикла.
S5
– режим повторно-кратковременной
нагрузки, включая электрическое
торможение:
последовательность идентичных рабочих
циклов, каждый из которых состоит из
периодов пуска, работы при постоянной
нагрузке, быстрого электрического
торможения и отключенного неподвижного
состояния; длительность этих периодов
недостаточна для достижения теплового
равновесия за время одного цикла.
Для
режимов работы S4
и
S5
характерными
параметрами являются: относительная
продолжительность включения, число
включений в час, коэффициент инерции
и постоянная кинетической энергии.
Под
относительной продолжительностью
включения понимается для режима S4
ПВS4
= [(tп
+
tр)/Тц
]100
%, для режима S5
ПВS5
= [(tп
+ tp
+
tт)/Тц]100%,
где
tп
и
tт
–
периоды, соответственно, пуска и
торможения.
Продолжительность
цикла Tц
= 3600/
z,
где z
–
число включений (циклов) в час.
Под коэффициентом инерции понимается
отношение суммы момента инерции двигателя
и приведенного к валу двигателя момента
инерции механизма к моменту инерции
двигателя:
kj
=
(Jдв
+Jпр. мех)/Jдв
мех)/Jдв
.
Постоянная
кинетической энергии – это отношение
кинетической энергии, запасенной
ротором при номинальной частоте вращения
(угловой скорости), к номинальной полной
мощности или произведению номинальных
напряжения и тока в машинах постоянного
тока.
Для
режимов работы S4
и
S5
предпочтительными
являются следующие значения: ПВ –
15; 25; 40 и 60
%;
z
–
30; 60; 90; 120; 180; 240 и 360 вкл./ч; kj
–
1,2; 1,6; 2; 2,5 и 4.
S6
–
режим продолжительной работы при
переменной нагрузке:
последовательность идентичных рабочих
циклов, каждый из которых состоит из
периодов работы при постоянной нагрузке
и на холостом ходу; длительность этих
периодов недостаточна для достижения
теплового равновесия за время одного
рабочего цикла. Характерным параметром
является продолжительность работы
ПР = (tр/Тц
)100%.
Предпочтительными
являются следующие значения ПР: 15; 25; 40
и 60 %. Продолжительность одного цикла
(если нет других указаний) принимается
равной 10 мин.
Рисунок 3.2
S7
–
режим продолжительной нагрузки, включая
электрическое
торможение: последовательность идентичных
рабочих циклов, каждый из которых состоит
из периодов пуска, работы при постоянной
нагрузке и электрического торможения;
длительность рабочего периода недостаточна
для достижения теплового равновесия
за время одного цикла.
Для
режима работы S7
характерными
параметрами являются число включений
в час, коэффициент инерции и постоянная
кинетической энергии. Предпочтительными
являются следующие значения:
z
—
30; 60; 90; 120; 180; 240 и 360 вкл./ч;
kj
– 1,2; 1,6; 2; 2,5; 4.
S8
–
режим работы при периодическом изменении
частоты вращения и нагрузки:
последовательность идентичных
рабочих циклов, каждый из которых
состоит из периодов ускорения, работы
при постоянной нагрузке, соответствующей
заданной частоте вращения, затем одного
или нескольких периодов работы при
других постоянных значениях нагрузки,
соответствующих другим частотам
вращения; длительность каждого рабочего
периода недостаточна для достижения
теплового равновесия за время одного
рабочего цикла.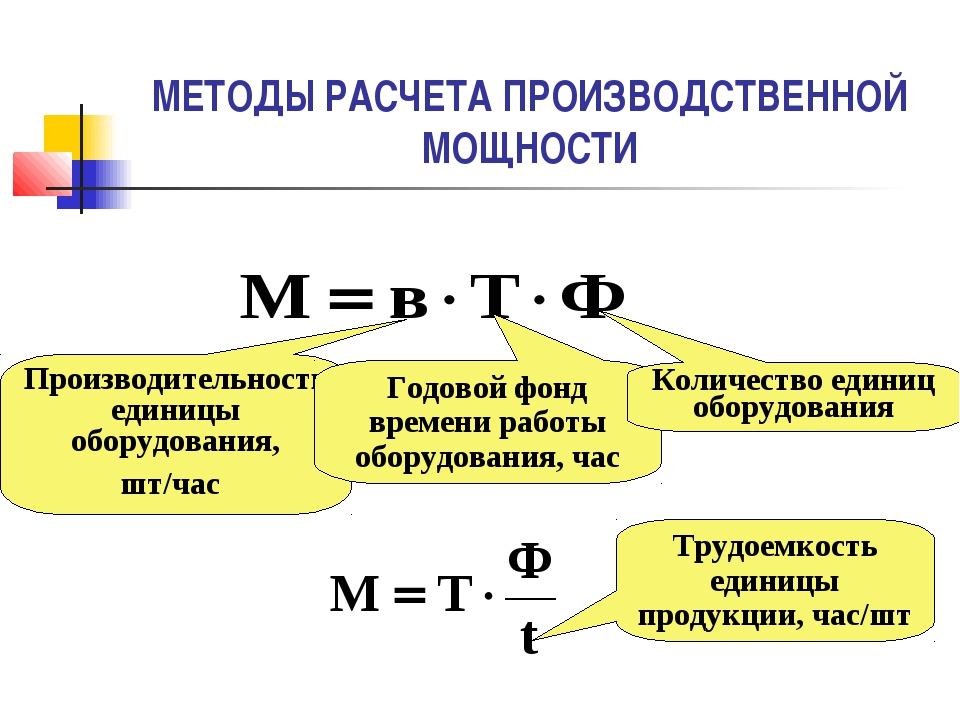
Для
режима работы S8
характерными
параметрами являются число включений
в 1 ч, относительная продолжительность
работы при каждой внешней нагрузке
и соответствующей ей частоте вращения,
а также коэффициент инерции и постоянная
кинетической энергии. Относительная
продолжительность работы в данном
случае при каждой из нагрузок ПРj=
[(tп.пj
+ tp.j)/
Тц]100
%, гдe
tp.j
– период работы при постоянной
j—й
нагрузке; tп.пj
– период переходного процесса (ускорения
или замедления) при переходе к j-му
значению частоты вращения (угловой
скорости) и соответствующей ей нагрузке.
Для
режима работы S8
предпочтительными
являются следующие значения параметров:
z
–
30; 60; 90; 120; 180; 240 и 360 вкл. /ч; kj
/ч; kj
–
1,2; 1,6; 2; 2,5; 4; ПР –15, 25, 40 и 60 %.
В
каталогах электрических машин приводятся
данные для номинальных режимов S1,
S2
и S3.
Задача выбора электрической машины
по мощности заключается в том, чтобы
правильно сопоставить ее рабочий режим
с номинальным, обеспечив максимальное
использование выбранного двигателя
по условиям нагрева.
Рекомендуемая
литература
Автоматизированный
электропривод типовых производственных
механизмов и технологических комплексов:
учебник для вузов / М.П. Белов, В.А.
Новиков, Л.Н. Рассудов. – М.: Академия,
2004. – С. 80-86.Родионов
В.Д., Терехов В.А., Яковлев В.Б. Технические
средства АСУ ТП: Учеб. пособие для вузов
/ Под ред. В.Б. Яковлева. – М.: Высш.шк.,
1989.
Лекция 4
Сменный, суточный и годовой режимы работы оборудования — Студопедия
Поделись
Лекция 4
РЕЖИМЫ РАБОТЫ И ЭФФЕКТИВНОСТЬ ИСПОЛЬЗОВАНИЯ ОБОРУДОВАНИЯ
Сменный, суточный и годовой режимы работы оборудования
Различают сменный, суточный и годовой режимы работы оборудования.
При сменном режиме работы оборудования сменное время распределяют на отрезки времени в часах и минутах, в течение которых оборудование выполняет свои основные функции и не работает по тем или иным причинам. Его разрабатывают для рабочих парков оборудования.
Рабочий парк – количество единиц одновременно работающего оборудования. Среднее количество единиц оборудования рабочего парка Np по маркам за отчетный период определяют по формуле
,
где п – число групп оборудования с одинаковым временем работы за отчетный период; Ni – количество единиц оборудования в i-й группе; t – фактическое время работы оборудования i-й группы, рабочие дни; Dp — число рабочих дней за отчетный период.
При разработке сменного режима работы оборудования учитывают перерывы в работе оборудования по следующим причинам: конструктивно-технологическим tкт, технологическим tт, организационным to и метеорологическим tм, а также по причинам, определяемым организацией труда и отдыха операторов или машинистов tот.
К конструктивно-технологическим перерывам относят время, затрачиваемое на выполнение ЕТО, подготовку оборудования к работе в начале смены и его передачу в конце смены. Перерывы в работе по технологическим причинам определяются технологией и организацией выполнения работ (перемещение оборудования с одной позиции на другую, очистка рабочих органов и т. д.). К перерывам, связанным с организацией труда операторов или машинистов, относят время, затрачиваемое на получение задания и ознакомление с чертежами и объектом, оформление нарядов, сменных рапортов и другой документации, а также время на отдых и личные надобности.
Простои по организационным причинам могут возникать из-за отсутствия фронта работ, несвоевременного обеспечения топливосмазочными материалами, устранения мелких неисправностей, перехода оборудования из одной рабочей зоны в другую и т. д.
Перерывы по метеорологическим причинам входят в сменный режим оборудования только в том случае, если они не включены в годовой режим работы.
При определении сменных режимов различают время чистой работы оборудования внутри смены tч, время работы оборудования внутри смены tр и полезное рабочее время tп.
Время чистой работы оборудования внутри смены находят из соотношения
tч= tсм – (tт + tкт + tот + tо + tм)
где tсм – продолжительность смены, ч.
Время работы оборудования внутри смены определяют по формуле
tр= tч + tт
Полезное рабочее время оборудования внутри смены вычисляют следующим образом
tп= tч + tт + tкт + tот
В зависимости от назначения среднесменные режимы работы оборудования составляют без привязки к определенным организациям и объектам (применительно к средним условиям работы оборудования внутри усредненной в течение года смены), с привязкой к ним и, наконец, с привязкой к определенному объекту и с учетом конкретных условий использования оборудования на объекте. Первые составляют при разработке сметных норм выработки оборудования с учетом усредненных условий применительно к отрасли промышленности в целом, вторые – в организациях при назначении для оборудования планово-расчетных норм выработки применительно к усредненным условиям его работы в данной организации и третьи – для определения возможного перевыполнения в данных конкретных условиях норм выработки, предусмотренных в нормативно-технической документации.
Первые составляют при разработке сметных норм выработки оборудования с учетом усредненных условий применительно к отрасли промышленности в целом, вторые – в организациях при назначении для оборудования планово-расчетных норм выработки применительно к усредненным условиям его работы в данной организации и третьи – для определения возможного перевыполнения в данных конкретных условиях норм выработки, предусмотренных в нормативно-технической документации.
Коэффициент внутрисменного использования оборудования Квопределяют из отношения числа часов полезной работы оборудования в течение смены tп к общей установленной продолжительности смены tсм
Кв= tп / tсм
Рекомендуется определять фактическое значение Кв на основе наблюдений за работой оборудования в течение смены.
При суточном режиме работы оборудования распределяют суточное календарное время на сменное (когда оборудование находится в работе) и несменное (когда оборудование не работает). Показателем исполнения суточного режима работы оборудования служит коэффициент сменности.
Показателем исполнения суточного режима работы оборудования служит коэффициент сменности.
Коэффициент сменности Ксм показывает среднее число рабочих смен среднесписочной единицы оборудования в сутки и определяется из отношения среднего числа часов работы tсф средне-списочной единицы оборудования в сутки к продолжительности смены tсм, т. е.
Ксм = tсф / tсм.
Списочный парк оборудования представляет собой инвентарное количество единиц оборудования, состоящего на балансе предприятия. Если парк оборудования за отчетный период изменялся, то среднесписочное количество единиц оборудования по маркам Nc определяют по формуле
,
где n – число групп оборудования с одинаковой длительностью пребывания на предприятии за отчетный период; Nс– количество единиц оборудования в i-й группе; ti– длительность пребывания оборудования i-й группы на предприятии, календарных дней; dк – число календарных дней за отчетный период.
Фактический средневзвешенный коэффициент сменности находят по формуле
где Тчф – фактически отработанные часы группой оборудования за отчетный период; Nс– среднесписочное количество единиц оборудования в группе, для которой определяется коэффициент сменности; Dp – число рабочих дней за отчетный период.
Плановый коэффициент сменности устанавливают с учетом фактического средневзвешенного его значения по оборудованию данной марки или данного типа за отчетный период.
При годовом режиме работы оборудования распределяют годовое календарное время на рабочее и время, когда оно не работает по тем или иным причинам. Годовые режимы разрабатывают на среднесписочную единицу оборудования по каждой группе или каждому виду оборудования для определения продолжительности его рабочего времени в течение года. Их применяют при разработке годовых производственных планов организаций, использующих оборудование; определении потребности в оборудовании для выполнения планируемых объемов работ; составлении годовых планов ТО и ремонта оборудования; определении планово-расчетных цен на эксплуатацию оборудования; расчетах экономической эффективности средств механизации; анализе фактического использования оборудования и разработке мероприятий по улучшению эксплуатации и повышению выработки оборудования.
Годовой (квартальный) режим работы оборудования устанавливают в часах и днях (сутках) рабочего времени.
Число часов работы оборудования в году (Тч) рассчитывают по формуле
Tч = Dр∙tсм∙Kсм ,
где Dp – число рабочих дней оборудования в году.
При расчете Dp учитывают следующие перерывы в работе оборудования: праздничные и выходные дни dпв, по метеорологическим условиям dм„ и по организационным (непредвиденным) причинам do, при выполнении периодических ТО и ремонтов dp и перебазировании оборудования с одного объекта на другой dпб.
Элементы управления предприятием, ориентированные на поддержку: режимы работы машин
Большинство производителей определяют набор взаимоисключающих режимов работы, которые позволяют обслуживающему персоналу оперативно взаимодействовать с процессами машин и конвейеров. Приложения управления, разработанные для машин, используют режимы работы, которые являются локальными для процессов отдельных станций. Приложения управления, разработанные для конвейеров, часто используют режимы работы, характерные для каждой области. Областные режимы обычно представляют собой локальный сегмент, зону, сектор или конвейерный процесс с несколькими станциями. Большинство производителей определяют режимы работы в соответствии с отраслевыми стандартами.
Важно, чтобы системные стратеги понимали разницу между режимами работы и другими режимами поддержки. Рабочие режимы специфичны для включения машины, процесса или механизма в цикл, в то время как вспомогательные режимы являются рабочими характеристиками, которые улучшают взаимодействие с пользователем и включают общие режимы управления станцией или процессом. Общие режимы поддержки включают:
- Управляемый ручной режим — это конструктивная особенность, которая требует, чтобы управляющее приложение использовало подсвеченные кнопки для подсказки действий, запускаемых вручную.

- Режим обслуживания позволяет обслуживающему персоналу перемещать объекты или механизмы из положения, а затем обратно в положение, не влияя на приложение управления.
- Режим выбега позволяет обслуживающему персоналу удалять объекты со станции, конвейера или технологической линии.
- Режим сухого цикла позволяет обслуживающему персоналу запускать машину или процесс без детали.
- Режим повтора позволяет обслуживающему персоналу повторять цикл обработки на одной и той же детали.
- Режим работы — это один из четырех взаимоисключающих режимов, которые позволяют человеку или приложению включить работу процесса, конвейера, машины или механизма.
Важно, чтобы системные стратеги понимали назначение каждого режима поддержки. Управляемый режим — это усовершенствование различных режимов работы, в которых требуется, чтобы кто-то нажимал кнопки. В частности, это означает наличие кнопки с подсветкой для: 1) активации процесса, 2) включения механизма или 3) перемещения объекта. Стратеги часто взаимозаменяемо используют термин «режим обслуживания» для обозначения гибкого режима ручного управления. В этом случае режим обслуживания является обязательным условием для включения одного или нескольких режимов с ручным управлением.
Когда этот режим верхнего уровня активен, он запрещает всем управляющим приложениям перемещать или сбрасывать переменные данных, а также блокировать или разблокировать сигналы приложений. Обычно это включает в себя те сигналы, которые связаны со схемами обнаружения движения, и однократные сигналы на основе управления. Режим выбега — это режим, который предотвращает попадание новых деталей в машину или процесс. Этот режим позволяет машинам удалять все объекты с технологической станции, конвейерной полосы или технологической линии. Режим сухого цикла — это специальный режим, который позволяет обслуживающему персоналу запускать машину или обрабатывать без деталей.
Разработчики предварительно запрограммировали этот режим, чтобы предотвратить функционирование некоторых действий подпроцесса, пока машина или процесс работают без детали. Например, этот режим предотвратит захват и последующую попытку загрузки роботом недостающей детали. Режим повтора аналогичен режиму сухого цикла. Однако этот режим позволяет станку или процессу выполнять несколько циклов обработки одной и той же детали. Следующие определения описывают распространенные режимы работы:
- Автоматический режим — это ограниченный режим работы, который позволяет управляющему приложению управлять перемещением объектов и механизмов.
- Полуавтоматический режим — это ограниченный режим работы, который позволяет человеку использовать одну или несколько кнопок для автоматического перемещения объектов и механизмов.
- Ручной режим — это ограниченный рабочий режим, который позволяет человеку перемещать объект или механизм, постоянно нажимая кнопку.
- Неограниченный режим — это свободный режим работы, который позволяет человеку перемещать объект или механизм, непрерывно нажимая кнопку.
- Схема активации режима — это схема настройки, уплотнения или фиксации/разблокировки, используемая для включения сигнала рабочего режима.
- Установившийся сигнал — это проверяемое состояние, которое должно оставаться во включенном или отключенном состоянии, чтобы активировать и поддерживать цепь в активном состоянии.
- Сигнал переменного состояния — это исследуемое состояние, которое меняет состояние после того, как его исходное состояние активировало цепь.
Большинство производителей дискретных деталей понимают, что автоматический режим означает безопасную работу без участия человека. Полуавтоматический режим подразумевает ту же операцию, но требует, чтобы кто-то инициировал движения объекта и механизма. Существует несколько форм ручных режимов, которые по отдельности влияют на необходимость ограниченного или неограниченного взаимодействия обслуживающего персонала с объектами и механизмами.
Ограниченное взаимодействие означает, что цепи управления проверяют свободное положение других механизмов и других объектов. Неограниченное взаимодействие означает, что цепи управления не проверяют положения других механизмов и других объектов. В большинстве случаев неограниченный режим означает, что обслуживающий персонал должен визуально проверять положение механизмов и объектов, физически нажимая и удерживая кнопку. Термин «кнопка» в дальнейшем будет относиться к проводной кнопке или определенной области мембраны сенсорной панели.
Для каждого из вышеперечисленных режимов работы требуется схема активации режима для включения уникального сигнала режима. Эти схемы активации состоят из множества устойчивых сигналов и сигналов с переменным состоянием. Установившиеся сигналы позволяют схеме переходить в режим, когда они включены, и должны оставаться включенными, чтобы поддерживать режим включенным. Для включения режима должны быть включены сигналы с переменным состоянием. Следующие определения в общем описывают эти проверяемые условия:
- Безопасность персонала готова — это устойчивый сигнал, который гарантирует, что никто не окажется в небезопасном положении, прежде чем что-либо двинется.
- Позиция готова — это сигнал с переменным состоянием, который гарантирует, что машина находится в правильном положении, позволяющем выполнять движения.
- Машина готова — это постоянный сигнал, который обеспечивает готовность электрических, пневматических и гидравлических цепей к выполнению движений.
- Нет незначительных ошибок — это сигнал с переменным состоянием, который гарантирует отсутствие заранее выбранных ошибок, прежде чем схема активации сможет активировать рабочий режим.
- Серьезных неисправностей нет сигнализирует об отсутствии предварительно выбранных неисправностей до того, как схема активации сможет активировать и поддерживать рабочий режим.
- Блокировки для достижения — это сигнал с переменным состоянием, который обеспечивает готовность других машин, связанных с процессом, до того, как схема активации сможет активировать рабочий режим.
- Блокировки для поддержания сигналов о том, что другие машины, связанные с технологическим процессом, готовы, прежде чем схема активации сможет включить и поддерживать режим работы.
Различные условия, запрограммированные в цепи активации режима, в основном зависят от специфики машины. Поскольку автоматический режим работы допускает автоматическую работу машины, схема активации применяемого режима обычно имеет все условия стационарного и переменного состояний. Разработчики обычно предусматривают специальную схему настройки, позволяющую группировать условия по категориям.
Сигнал «Персонал готов к работе» означает, что все коврики, связанные с безопасностью, свободны, двери по периметру машины не открыты, световые экраны, защищающие проемы, свободны, а датчики движения не регистрируют движение. Многие из этих условий являются установившимися сигналами, в то время как другие являются переменными. Все сигналы с переменным состоянием должны иметь параллельное состояние, чтобы гарантировать, что включенный сигнал готовности остается включенным. Например, некоторые световые экраны обнаруживают, что кто-то непреднамеренно получает доступ к машине через обычные области входа и выхода части. Разработчики ожидают, что некоторые сигналы на экране изменят состояние, когда деталь входит или выходит из станка. Чтобы схема активации не отключала определенный режим при движении деталей, разработчики совмещают сигнал деактивированного светового экрана с активированным сигналом переключателя отключения звука.
Сигнал «машинное положение готово» обычно используется для предотвращения перехода управляющего приложения в автоматический режим. Это важно, когда разработчики или производители машин считают, что машина должна сначала находиться в известном механическом положении, прежде чем могут начаться автоматические движения. Разработчики решают, какие физические состояния или позиции, характерные для механизма, должны присутствовать, прежде чем будет разрешен переход в рабочий режим. Поскольку движение начнется после включения режима, разработчики ожидают, что сигналы готовности к положению изменят свое состояние после активации режима.
Сигнал «машина готова» указывает на то, что электропитание включено, пневматическое давление в норме, работают гидронасосы, включено специальное оборудование. Эти типы сигналов должны оставаться включенными, чтобы включить схему активации режима. Некоторые разработчики признают, что некоторые условия должны индивидуально поддерживаться схемой подавления дребезга. Эта специальная схема таймера не позволяет мгновенным прерываниям сигнала отключать сигнал активации режима.
Два сигнала «нет ошибок» определяют, какие ошибки должны быть устранены, чтобы активировать рабочий режим, а какие должны быть отключены, чтобы режим оставался включенным. Разработчики обычно просматривают набор идентифицируемых ошибок и классифицируют их как незначительные или серьезные ошибки, связанные с достижением, а затем поддержанием рабочего режима. Как приложения контроллера включают отдельные сигналы неисправности, является зарезервированной темой для будущей статьи.
Сигналы «блокировки достижения и поддержания» определяют сигналы, поступающие от других контроллеров станка. Разработчики, которые программируют другие контроллеры, объединяют все свои соответствующие сигналы с переменным состоянием, чтобы обеспечить блокировку для достижения сигнала, в то время как все устойчивые сигналы включают поддерживаемую блокировку.
На рис. 1 показаны две типовые схемы активации автоматического режима. В контуре верхнего уплотнения используется кнопка мгновенного действия для включения автоматического режима. Чтобы отключить сигнал режима, в конструкции используется кнопка отмены для снятия пломбы. Конструкторы размещают сигнал уплотнения во всех переменных состояниях, программируя все установившиеся сигналы за пределами уплотнения. Нижняя схема использует селектор режима с фиксированными положениями переключателя, чтобы постоянно включать сигнал автоматического режима. Поскольку в схеме нет запечатанного или зафиксированного сигнала, программисты не могут добавлять в схему сигналы с переменным состоянием.
После того, как персонал службы поддержки выберет нужный режим работы, активируется схема активации режима, чтобы активировать дискретный сигнал режима работы. Приложения управления используют эти взаимоисключающие сигналы режима, чтобы различать логические пути, необходимые для перемещения объектов и механизмов.
Дэниел Б. Кардинал работает техническим консультантом в Insyte Inc., внедряя интегрированные приложения для планирования и идентификации деталей в автомобильной промышленности. Под редакцией Криса Вавры, производственного редактора, 9 лет.0123 Техника управления , [email protected].
ДОПОЛНИТЕЛЬНЫЕ СОВЕТЫ
Ключевые понятия
- Большинство производителей определяют режимы работы в соответствии с отраслевыми стандартами.
- Запрограммированные условия схемы активации режима зависят в основном от специфики машины.
- Приложения управления используют эти взаимоисключающие сигналы режима, чтобы различать логические пути, необходимые для перемещения объектов и механизмов.
Подумайте об этом
Какой режим работы вы чаще всего используете и какой из них наиболее эффективен в вашей конкретной работе?
ОНЛАЙН дополнительный
См. предыдущие истории из этой серии Дэниела Кардинала, ссылки на которые приведены ниже.
Есть ли у вас опыт и знания по темам, упомянутым в этом содержании? Вам следует подумать о том, чтобы внести свой вклад в нашу редакционную команду CFE Media и получить признание, которого вы и ваша компания заслуживаете. Нажмите здесь, чтобы начать этот процесс.
Три вида машины, оборудования и системы
Три вида машины, оборудования и системы | Блог E-Square
- Дом
- Блог
- Три вида машины, оборудования и системы
1 июня 2021 г.
Производственная деятельность носит циклический характер. Оборудование и процессы характеризуются различными режимами в цикле деятельности организации, а именно производственным, резервным и остановочным режимами. Три типа оборудования и систем обеспечивают важную основу для создания структурированного подхода к оценке и контроль опасной энергии .
Режим производства:
Производственное оборудование работает в режиме производства. Это подразумевает, что машина, оборудование или система полностью запитаны и способны выполнять или находятся в процессе выполнения своей назначенной или предполагаемой функции. В производственном режиме машины и оборудование производят продукцию.
Режим ожидания:
Режим ожидания — это состояние между производством и выключением. Резервный режим — это блокировка производственного режима и возможность выполнения проектной или предполагаемой функции, налагаемой за счет применения устройств управления. Эти действия включают деактивацию и, возможно, обесточивание подсистем и компонентов машин, оборудования и системы.
Режим выключения:
Выключение — это состояние неспособности машины или оборудования работать или выделять энергию. Обратите внимание, что система может сохранять энергию в режиме отключения. Таким образом, требуется надлежащий анализ в ситуациях, когда энергия может оставаться запасенной или захваченной.
В соответствии с данным стандартом отключение включает в себя действия, предпринимаемые для отключения оборудования, машин или систем. Это включает,
Подготовка к отключению, когда уполномоченный сотрудник определяет, какие виды источников энергии присутствуют и какие необходимо контролировать.
Уведомляя затронутых сотрудников, уполномоченный сотрудник затем информирует затронутых сотрудников о происходящем отключении. Объяснение того, что будет заблокировано и помечено…? Почему это происходит….? Как много времени это займет….? Кто является ответственным офицером….? чтобы убедиться, что все осведомлены о проведении технического обслуживания или технического обслуживания.
Наконец, отключение оборудования, оно гарантирует, что все элементы управления находятся в «выключенном положении» и что все движущиеся части, такие как маховики, шестерни и шпиндели, полностью остановились.
Таким образом, только после завершения процедуры отключения оборудование считается безопасным, и рабочие могут, наконец, приступить к своим задачам по обслуживанию и техническому обслуживанию после изоляции, блокировки и маркировки и проверки.

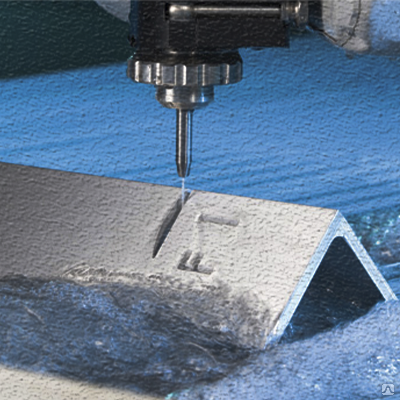
 Обработка позволяет подготовить поверхность под покрытие, улучшить характеристика материала, удалить нагар и другие повреждения детали.
Обработка позволяет подготовить поверхность под покрытие, улучшить характеристика материала, удалить нагар и другие повреждения детали.
 Для каждого материала установлены свои алгоритмы, благодаря которым давление и состав режущей струи подбирается в автоматическом режиме. Такая программа позволяет провести даже фигурную резку материала.
Для каждого материала установлены свои алгоритмы, благодаря которым давление и состав режущей струи подбирается в автоматическом режиме. Такая программа позволяет провести даже фигурную резку материала.


 Поэтому если Вам необходимо оборудование для гидроабразивной обработки, то обращайтесь к нам!
Поэтому если Вам необходимо оборудование для гидроабразивной обработки, то обращайтесь к нам! Для выбора пескоструек необходимо составить первичные условия эксплуатации – необходимая степень воздействия, используемые материалы обработки, время беспрерывного функционирования, анализ места работы.
Для выбора пескоструек необходимо составить первичные условия эксплуатации – необходимая степень воздействия, используемые материалы обработки, время беспрерывного функционирования, анализ места работы.
 Для этого приобретают или делают самостоятельно установки с небольшой мощностью. С их помощью удаляют ржавчину с металла, восстанавливают инструмент.
Для этого приобретают или делают самостоятельно установки с небольшой мощностью. С их помощью удаляют ржавчину с металла, восстанавливают инструмент.
 При применении стандартных методов термического воздействия нужна значительная температура, так как данные металлы обладают высоким показателем теплопроводности. Их же сложнее резать с помощью лазера из-за низкого коэффициента поглощения излучения. У гидроабразивной обработки таких проблем нет.
При применении стандартных методов термического воздействия нужна значительная температура, так как данные металлы обладают высоким показателем теплопроводности. Их же сложнее резать с помощью лазера из-за низкого коэффициента поглощения излучения. У гидроабразивной обработки таких проблем нет.

 Тише. Умнее.
Тише. Умнее.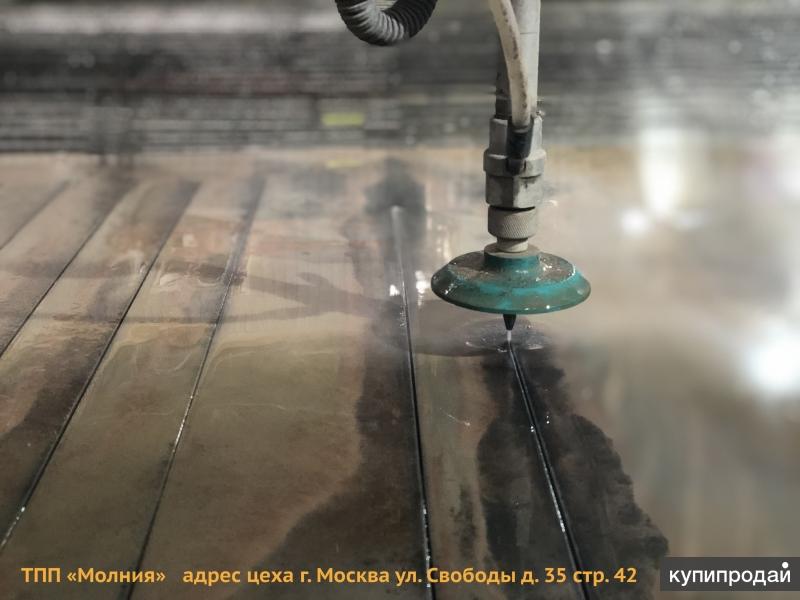 Он включает в себя серводвигатель, непосредственно охватывающий прецизионную шарико-винтовую передачу с высокой нагрузкой. В шарико-винтовой передаче непосредственно находятся керамические плунжеры, которые совершают возвратно-поступательное движение, создавая насосное действие, почти так же, как гидравлический цилиндр работает в гидроабразивном насосе с усилителем.
Он включает в себя серводвигатель, непосредственно охватывающий прецизионную шарико-винтовую передачу с высокой нагрузкой. В шарико-винтовой передаче непосредственно находятся керамические плунжеры, которые совершают возвратно-поступательное движение, создавая насосное действие, почти так же, как гидравлический цилиндр работает в гидроабразивном насосе с усилителем.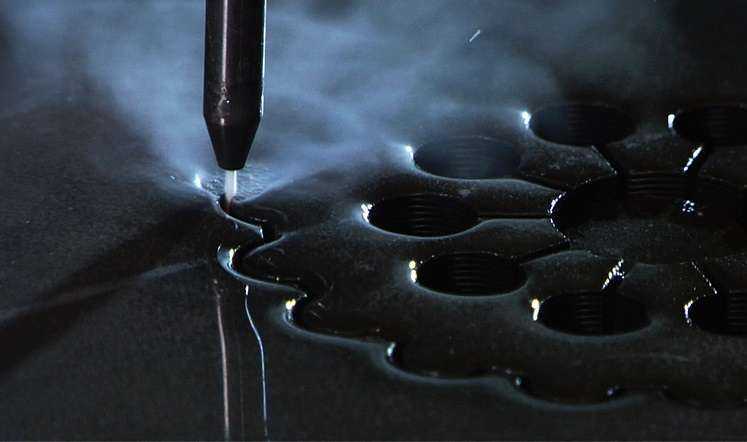
 Эти два типа предлагают различные преимущества, но оба имеют значительные ограничения.
Эти два типа предлагают различные преимущества, но оба имеют значительные ограничения. Водоструйные насосы с коленчатым валом и прямым приводом не подходят для работы при переменном давлении и менее надежны, чем насосы с мультипликатором, из-за высокой скорости поршня плунжера.
Водоструйные насосы с коленчатым валом и прямым приводом не подходят для работы при переменном давлении и менее надежны, чем насосы с мультипликатором, из-за высокой скорости поршня плунжера. . Водоструйные насосы с усилителем по своей природе менее эффективны из-за мощности, необходимой для простого запуска гидравлической системы. Они также используют большой процент своей мощности независимо от того, работаете ли вы при резке или на холостом ходу, поскольку гидравлическое масло проходит через предохранительный клапан в гидравлической системе. Quantum® использует только мощность, необходимую для процесса резки. Это означает, что независимо от того, открыта или закрыта режущая головка, снижается давление или расход, дополнительные потери мощности отсутствуют.
. Водоструйные насосы с усилителем по своей природе менее эффективны из-за мощности, необходимой для простого запуска гидравлической системы. Они также используют большой процент своей мощности независимо от того, работаете ли вы при резке или на холостом ходу, поскольку гидравлическое масло проходит через предохранительный клапан в гидравлической системе. Quantum® использует только мощность, необходимую для процесса резки. Это означает, что независимо от того, открыта или закрыта режущая головка, снижается давление или расход, дополнительные потери мощности отсутствуют. Наиболее распространенные применения гидроабразивной резки, такие как резка металла, изготовление изделий, резка камня и резка стекла, работают с рабочим циклом около 60%.
Наиболее распространенные применения гидроабразивной резки, такие как резка металла, изготовление изделий, резка камня и резка стекла, работают с рабочим циклом около 60%. Для того же примера экономия приблизительно 2
Для того же примера экономия приблизительно 2
 S.Wallis and FutunaWestern SaharaYemenZambiaZimbabweÅland IslandsCountry
S.Wallis and FutunaWestern SaharaYemenZambiaZimbabweÅland IslandsCountry

 Это делает его энергоэффективным.
Это делает его энергоэффективным. Здесь абразив подается в струю сбоку. Затем вода и абразив поступают в смесительную трубку, где они смешиваются до образования сплошного потока. Вы можете узнать больше о гидроабразивной резке из Wiki.
Здесь абразив подается в струю сбоку. Затем вода и абразив поступают в смесительную трубку, где они смешиваются до образования сплошного потока. Вы можете узнать больше о гидроабразивной резке из Wiki. Усовершенствованные водометы могут резать и сталь толщиной около 23 см, но такие особые требования возникают довольно редко.
Усовершенствованные водометы могут резать и сталь толщиной около 23 см, но такие особые требования возникают довольно редко.
 д., с другой стороны, водоструйная резка позволяет выполнять 3D резку металла.
д., с другой стороны, водоструйная резка позволяет выполнять 3D резку металла. Техника водоструйной резки не выделяет вредных газов и не повреждает края зоны реза из-за нагрева. В то же время плазменная резка также является эффективным способом резки таких металлов, как медь, алюминий или нержавеющая сталь. Кроме того, он придает металлам более изысканный вид и намного эффективнее, чем метод пламени.
Техника водоструйной резки не выделяет вредных газов и не повреждает края зоны реза из-за нагрева. В то же время плазменная резка также является эффективным способом резки таких металлов, как медь, алюминий или нержавеющая сталь. Кроме того, он придает металлам более изысканный вид и намного эффективнее, чем метод пламени.
 Какие отрасли в настоящее время используют станки гидроабразивной резки металла?
Какие отрасли в настоящее время используют станки гидроабразивной резки металла?


 Соответственно, вы увидите, как быстро растет бизнес.
Соответственно, вы увидите, как быстро растет бизнес.
 «Мы тестируем разные конфигурации, чтобы найти оптимальное сочетание. Поэтому у одного ровера может быть на одну камеру больше, у другого радары могут иметь другое расположение и так далее», — поясняют инженеры.
«Мы тестируем разные конфигурации, чтобы найти оптимальное сочетание. Поэтому у одного ровера может быть на одну камеру больше, у другого радары могут иметь другое расположение и так далее», — поясняют инженеры. Сами роботы стали крупнее из-за более вместительного отсека.
Сами роботы стали крупнее из-за более вместительного отсека.

 Его расписание зависит от локации: в Иннополисе робот развозит заказы каждый день с 10:00 до 22:00, в районе «Ходынского поля» — с 11:00 до 20:00 в будние дни и с 12:00 до 20:00 в выходные, «Белорусская» — с 12:00 до 20:00 по будням.
Его расписание зависит от локации: в Иннополисе робот развозит заказы каждый день с 10:00 до 22:00, в районе «Ходынского поля» — с 11:00 до 20:00 в будние дни и с 12:00 до 20:00 в выходные, «Белорусская» — с 12:00 до 20:00 по будням. Сразу бросается в глаза разница в размерах роботов. Новое поколение увеличилось в размерах по всем измерениям.
Сразу бросается в глаза разница в размерах роботов. Новое поколение увеличилось в размерах по всем измерениям.
 Например, перед пешеходным переходом со светофором ровер выбирает наиболее удобное положение для того, чтобы пересечь дорогу, и разворачивается на месте.
Например, перед пешеходным переходом со светофором ровер выбирает наиболее удобное положение для того, чтобы пересечь дорогу, и разворачивается на месте.

 «Например, в период высокой загруженности мы может предлагать пользователю выбор: получить заказ быстрее с помощью ровера либо подождать, когда появятся свободные курьеры», — рассказывает Швейко.
«Например, в период высокой загруженности мы может предлагать пользователю выбор: получить заказ быстрее с помощью ровера либо подождать, когда появятся свободные курьеры», — рассказывает Швейко.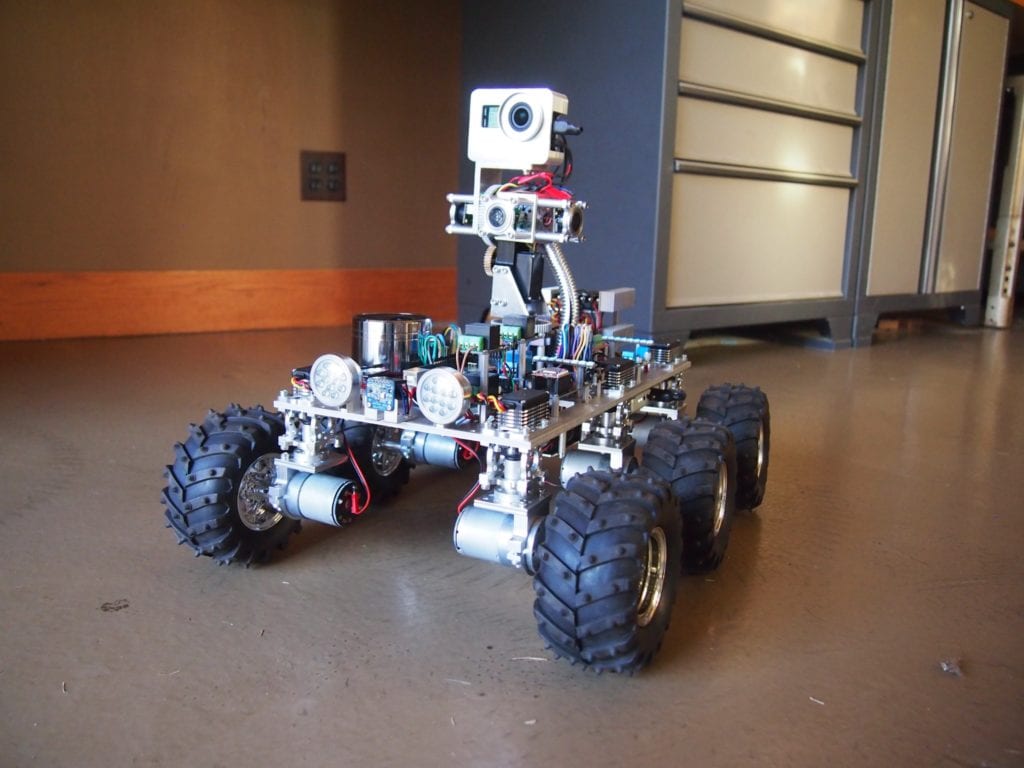
 Мы собрали ответы на самые популярные и не самые очевидные вопросы про них.
Мы собрали ответы на самые популярные и не самые очевидные вопросы про них. В начале следующего года эксперимент распространится на 27 почтовых отделений в разных районах столицы. У «Яндекса» есть партнеры в России, США и ОАЭ.
В начале следующего года эксперимент распространится на 27 почтовых отделений в разных районах столицы. У «Яндекса» есть партнеры в России, США и ОАЭ. Ровер внедрили быстро. В июне 2019 года эта идея появилась, через неделю была готова тележка на колесах, а в ноябре начали тестировать первый прототип.
Ровер внедрили быстро. В июне 2019 года эта идея появилась, через неделю была готова тележка на колесах, а в ноябре начали тестировать первый прототип.  Это один из крупнейших сервисов в США. Сейчас он обслуживает 250 кампусов в разных штатах. «У студентов и преподавателей американских университетов и колледжей есть отдельные счета, деньги с которых можно тратить только на еду. Например, студенческие карты обычно пополняют родители. Grubhub интегрировал счета студентов в приложение, упростив процесс заказа из ресторанов и кафе. Это позволило увеличить объем заказов, но потребовалось больше курьеров. В Штатах низкоквалифицированный труд стоит сравнительно дорого, поэтому доставлять роботами выгоднее. Кроме того, студенты — прогрессивная публика, им нравятся роботы. В одном кампусе студенты ведут Instagram с нашими роверами. Наше соглашение с Grubhub подразумевает, что они не используют других роботов, кроме наших. На каждый кампус нужно по несколько десятков роботов. За первые полгода мы уже поставили роботов в два университета и еще несколько на подходе».
Это один из крупнейших сервисов в США. Сейчас он обслуживает 250 кампусов в разных штатах. «У студентов и преподавателей американских университетов и колледжей есть отдельные счета, деньги с которых можно тратить только на еду. Например, студенческие карты обычно пополняют родители. Grubhub интегрировал счета студентов в приложение, упростив процесс заказа из ресторанов и кафе. Это позволило увеличить объем заказов, но потребовалось больше курьеров. В Штатах низкоквалифицированный труд стоит сравнительно дорого, поэтому доставлять роботами выгоднее. Кроме того, студенты — прогрессивная публика, им нравятся роботы. В одном кампусе студенты ведут Instagram с нашими роверами. Наше соглашение с Grubhub подразумевает, что они не используют других роботов, кроме наших. На каждый кампус нужно по несколько десятков роботов. За первые полгода мы уже поставили роботов в два университета и еще несколько на подходе». В следующем году роботы «Яндекса» начнут доставлять продукты из сети супермаркетов Carrefour в ОАЭ.
В следующем году роботы «Яндекса» начнут доставлять продукты из сети супермаркетов Carrefour в ОАЭ.  Они изначально делали роботов для университетских кампусов. Но ни одна компания, ни все существующие компании вместе не могут закрыть огромный спрос. Это направление позволяет нам получать доход от технологии беспилотного вождения уже сейчас, когда регулирование для беспилотных автомобилей не существует в большинстве стран мира. Для партнеров мы логистический сервис-провайдер. Иначе: мы предоставляем им услуги доставки», — говорит Артем Фокин.
Они изначально делали роботов для университетских кампусов. Но ни одна компания, ни все существующие компании вместе не могут закрыть огромный спрос. Это направление позволяет нам получать доход от технологии беспилотного вождения уже сейчас, когда регулирование для беспилотных автомобилей не существует в большинстве стран мира. Для партнеров мы логистический сервис-провайдер. Иначе: мы предоставляем им услуги доставки», — говорит Артем Фокин. 
 Мировой кризис на рынке полупроводников тоже не сильно помогает, но мы пока справляемся».
Мировой кризис на рынке полупроводников тоже не сильно помогает, но мы пока справляемся».
.jpg)


 На Земле этот вид кремнезема обычно существует в горячих источниках или горячих паровых жерлах, где жизнь, какой мы ее знаем, часто находит горячий, счастливый дом. Возможно, это сделали и древние микробы на Марсе.
На Земле этот вид кремнезема обычно существует в горячих источниках или горячих паровых жерлах, где жизнь, какой мы ее знаем, часто находит горячий, счастливый дом. Возможно, это сделали и древние микробы на Марсе. 00 RUB
00 RUB
 00 RUB
00 RUB
 00 RUB
00 RUB
 При разработке используется современный подход к проектированию, что позволяет получить заказчику полную картину того, что он заказывает, комплект чертежей и плюс 3D визуализация позволит сделать контакт заказчика и разработчика максимально понятным. Приобретая торговое оборудование из дерева в нашей компании, вы получаете качественный продукт, на который распространяется гарантия.
При разработке используется современный подход к проектированию, что позволяет получить заказчику полную картину того, что он заказывает, комплект чертежей и плюс 3D визуализация позволит сделать контакт заказчика и разработчика максимально понятным. Приобретая торговое оборудование из дерева в нашей компании, вы получаете качественный продукт, на который распространяется гарантия.  Непрерывное развитие, современные технологии и инновации, поиск новых решений, know-how — все это к услугам клиентов, которые по достоинству оценили выгоду работы с данной компанией.
Непрерывное развитие, современные технологии и инновации, поиск новых решений, know-how — все это к услугам клиентов, которые по достоинству оценили выгоду работы с данной компанией.


 de
de
 Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения.
Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения. Так он и ползает деловито по ребрам между вершинами, пока не приберет всю квартиру. Информация о пройденных ребрах и вершинах остается в памяти, так что по второму кругу на одном месте убирать он не будет.
Так он и ползает деловито по ребрам между вершинами, пока не приберет всю квартиру. Информация о пройденных ребрах и вершинах остается в памяти, так что по второму кругу на одном месте убирать он не будет. Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения.
Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения. Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость.
Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость. Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось).
Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось). Важно правильно подобрать комплектующие и тщательно их настроить.
Важно правильно подобрать комплектующие и тщательно их настроить. В противном случае есть опасность, что провод будет перегружен, нагреется или даже загорится. Грамотный электроник подберет провода нужного сечения в зависимости от силы тока, который по ним пойдет.
В противном случае есть опасность, что провод будет перегружен, нагреется или даже загорится. Грамотный электроник подберет провода нужного сечения в зависимости от силы тока, который по ним пойдет. Электроник учтет будущие условия работы при проектировании, а при необходимости — предусмотрит охлаждение элементов или внутреннюю вентиляцию.
Электроник учтет будущие условия работы при проектировании, а при необходимости — предусмотрит охлаждение элементов или внутреннюю вентиляцию. Давайте посмотрим на примере, какие элементы робота — ответственность мехатроника и как он может сделать робота надежнее.
Давайте посмотрим на примере, какие элементы робота — ответственность мехатроника и как он может сделать робота надежнее.


 Или ознакомьтесь с некоторыми идеями роботов, чтобы увидеть, что вы можете построить.
Или ознакомьтесь с некоторыми идеями роботов, чтобы увидеть, что вы можете построить.






 В производстве соблюдаются стандарты и требования ГОСТ. Под заказ изготавливаем паллеты деревянные в Москве нестандартных размеров.
В производстве соблюдаются стандарты и требования ГОСТ. Под заказ изготавливаем паллеты деревянные в Москве нестандартных размеров. Покупаем тару, бывшую в эксплуатации. Также принимаем поддоны деревянные в Москве и Московской области на обмен и на реставрацию.
Покупаем тару, бывшую в эксплуатации. Также принимаем поддоны деревянные в Москве и Московской области на обмен и на реставрацию. Процедура обмена происходит в максимально быстром режиме. Звоните, чтобы обсудить условия выгодной сделки!
Процедура обмена происходит в максимально быстром режиме. Звоните, чтобы обсудить условия выгодной сделки! Такое клеймо тары несет рекламную и защитную функцию.
Такое клеймо тары несет рекламную и защитную функцию. 03.2022
03.2022
 Если вы профессионал и вам нужен совет по поводу планов по покупке домкрата для поддонов, ознакомьтесь с нашей статьей: «Все, что вам нужно знать перед покупкой домкрата для поддонов!».
Если вы профессионал и вам нужен совет по поводу планов по покупке домкрата для поддонов, ознакомьтесь с нашей статьей: «Все, что вам нужно знать перед покупкой домкрата для поддонов!». 2 Пластиковые стеллажные поддоны:
2 Пластиковые стеллажные поддоны:
 Не содержат примесей, соответствуют фитосанитарным нормам МСФМ, регулирующим экспортные поставки, без необходимости дополнительной обработки и заменяют термообработанные поддоны,
Не содержат примесей, соответствуют фитосанитарным нормам МСФМ, регулирующим экспортные поставки, без необходимости дополнительной обработки и заменяют термообработанные поддоны,


 е. меньше повреждений конвейеров, колес вилочных погрузчиков и т. д.)
е. меньше повреждений конвейеров, колес вилочных погрузчиков и т. д.)
 Поддон является наиболее распространенным основанием для грузовой единицы, которая включает в себя поддон и товары, уложенные на него, обычно закрепленные стретч-пленкой, ремнями, термоусадочной пленкой, клеем, воротником поддона или другими средствами стабилизации, включая многоразовые обертки, ремни и сети. 9
Поддон является наиболее распространенным основанием для грузовой единицы, которая включает в себя поддон и товары, уложенные на него, обычно закрепленные стретч-пленкой, ремнями, термоусадочной пленкой, клеем, воротником поддона или другими средствами стабилизации, включая многоразовые обертки, ремни и сети. 9 Концепция объединения поддонов начала серьезно обсуждаться в это время.
Концепция объединения поддонов начала серьезно обсуждаться в это время. Древесина — жесткий материал, недорогой, и его легко изготовить в различных размерах по мере необходимости. Поддоны, изготовленные из других материалов, также играют важную роль. Пластиковые поддоны ценятся по нескольким причинам, включая долговечность, простоту очистки, освобождение от требований ISPM 15 и другие преимущества. Бумажные поддоны популярны благодаря своему легкому весу, чистоте, освобождению от требований ISPM 15 и простоте переработки. Деревянные композитные поддоны также не подпадают под действие ISPM 15, обеспечивая жесткий продукт по конкурентоспособной цене, который можно легко переработать и который обычно можно вкладывать друг в друга, чтобы улучшить использование куба при транспортировке и хранении. Металлические поддоны также присутствуют, особенно в тех случаях, когда требуются прочность и долговечность поддонов.
Древесина — жесткий материал, недорогой, и его легко изготовить в различных размерах по мере необходимости. Поддоны, изготовленные из других материалов, также играют важную роль. Пластиковые поддоны ценятся по нескольким причинам, включая долговечность, простоту очистки, освобождение от требований ISPM 15 и другие преимущества. Бумажные поддоны популярны благодаря своему легкому весу, чистоте, освобождению от требований ISPM 15 и простоте переработки. Деревянные композитные поддоны также не подпадают под действие ISPM 15, обеспечивая жесткий продукт по конкурентоспособной цене, который можно легко переработать и который обычно можно вкладывать друг в друга, чтобы улучшить использование куба при транспортировке и хранении. Металлические поддоны также присутствуют, особенно в тех случаях, когда требуются прочность и долговечность поддонов. Поддоны со сплошными стрингерами обычно допускают двухсторонний вход (с каждого конца поддона), в то время как зубчатые стрингеры допускают частичный четырехсторонний вход (вилочным погрузчиком через выемки, а также полный доступ с концов), в то время как блочные поддоны обычно допускают полный четырехсторонний вход.
Поддоны со сплошными стрингерами обычно допускают двухсторонний вход (с каждого конца поддона), в то время как зубчатые стрингеры допускают частичный четырехсторонний вход (вилочным погрузчиком через выемки, а также полный доступ с концов), в то время как блочные поддоны обычно допускают полный четырехсторонний вход. Односторонний поддон также обычно называют салазками.
Односторонний поддон также обычно называют салазками. В случае аренды пользователи поддонов могут пользоваться высококачественным поддоном по цене, связанной только с использованием, а не с прямой покупкой поддона. В этом отношении объединение может заменить потребность в одноразовых поддонах, обеспечив более низкую стоимость поездки, исключив твердые отходы и повысив эффективность работы по всей цепочке поставок.
В случае аренды пользователи поддонов могут пользоваться высококачественным поддоном по цене, связанной только с использованием, а не с прямой покупкой поддона. В этом отношении объединение может заменить потребность в одноразовых поддонах, обеспечив более низкую стоимость поездки, исключив твердые отходы и повысив эффективность работы по всей цепочке поставок.
 Конструкцию можно установить как внутри здания, так и снаружи.
Конструкцию можно установить как внутри здания, так и снаружи.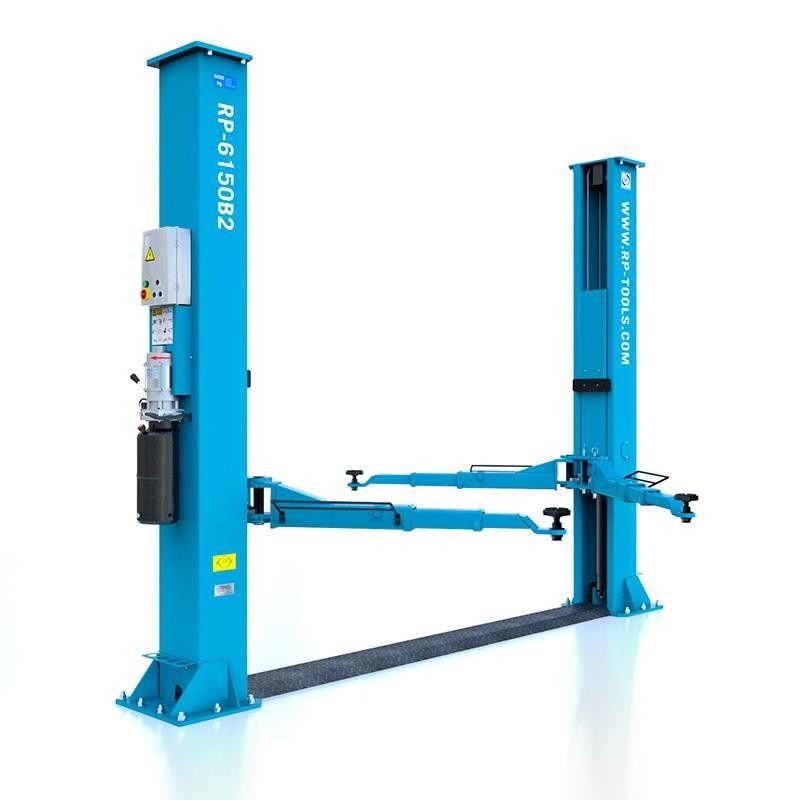 В варианте с полом из рифлёного алюминия вес тоже небольшой.
В варианте с полом из рифлёного алюминия вес тоже небольшой. Они помогут проверить детали подвески, найти неисправность в выхлопной системе и т. д. От их производительности и надёжности зависит качество выполняемых работ, безопасность работников сервиса и сохранность машины. Расскажем о лучших автомобильных подъёмниках настоящего времени, назовём их плюсы и минусы, а также дадим рекомендации по выбору таких устройств.
Они помогут проверить детали подвески, найти неисправность в выхлопной системе и т. д. От их производительности и надёжности зависит качество выполняемых работ, безопасность работников сервиса и сохранность машины. Расскажем о лучших автомобильных подъёмниках настоящего времени, назовём их плюсы и минусы, а также дадим рекомендации по выбору таких устройств. Его мощность: 730 Вт, грузоподъёмность модели: 1000 кг. Подъёмник обладает компактными для такого класса габаритами: 8050х6600х136 мм и относительно небольшой массой: 80 кг.
Его мощность: 730 Вт, грузоподъёмность модели: 1000 кг. Подъёмник обладает компактными для такого класса габаритами: 8050х6600х136 мм и относительно небольшой массой: 80 кг.


 Скорость поднятия площадки до предельной высоты: 50 секунд. Габариты устройства в упаковке: 4400х510х800 мм, вес: 1095 кг, высота стоек: 2186 мм, грузоподъёмность: 3,5 т.
Скорость поднятия площадки до предельной высоты: 50 секунд. Габариты устройства в упаковке: 4400х510х800 мм, вес: 1095 кг, высота стоек: 2186 мм, грузоподъёмность: 3,5 т. 13
13
 Это поможет сделать правильный выбор.
Это поможет сделать правильный выбор. SuperLift 4-дюймовый комплект для подъемного подъема
SuperLift 4-дюймовый комплект для подъемного подъема 

 дифференциального падения. В нем используются усиленные шаровые опоры, уже установленные в стальные верхние рычаги, входящие в комплект. Кроме того, в него входят внутренние втулки UCA премиум-класса и распорные втулки, которые помогают продлить срок службы втулок.
дифференциального падения. В нем используются усиленные шаровые опоры, уже установленные в стальные верхние рычаги, входящие в комплект. Кроме того, в него входят внутренние втулки UCA премиум-класса и распорные втулки, которые помогают продлить срок службы втулок.
 38; margin-top: 0pt; margin-bottom: 0pt;»> В этот комплект входят две передние скользящие листовые рессоры с болтовыми зажимами для выравнивания листа, антифрикционные накладки и несколько конических листов для общего улучшения качества езды, в том числе более плавного и безопасного движения. Он также включает в себя кронштейн для перемещения рулевой тяги, рычаг сошки для коррекции рулевого управления и удлиненные тяги стабилизатора поперечной устойчивости. Этот лифт-комплект стоит 2412 долларов.
38; margin-top: 0pt; margin-bottom: 0pt;»> В этот комплект входят две передние скользящие листовые рессоры с болтовыми зажимами для выравнивания листа, антифрикционные накладки и несколько конических листов для общего улучшения качества езды, в том числе более плавного и безопасного движения. Он также включает в себя кронштейн для перемещения рулевой тяги, рычаг сошки для коррекции рулевого управления и удлиненные тяги стабилизатора поперечной устойчивости. Этот лифт-комплект стоит 2412 долларов. Существующие конструкции или большие штабеля строительных материалов могут помешать вашей команде добраться до места, где должна быть выполнена ваша работа. Если вам нужен подъемник, способный разместить ваших рабочих именно там, где они должны быть, пришло время … Читать еще
Существующие конструкции или большие штабеля строительных материалов могут помешать вашей команде добраться до места, где должна быть выполнена ваша работа. Если вам нужен подъемник, способный разместить ваших рабочих именно там, где они должны быть, пришло время … Читать еще Кроме того, ваша команда должна покрывать расходы на работу, включая топливо для оборудования и техническое обслуживание. Вот где на помощь приходит электрический подъемник! К счастью, Скидка … Читать дальше
Кроме того, ваша команда должна покрывать расходы на работу, включая топливо для оборудования и техническое обслуживание. Вот где на помощь приходит электрический подъемник! К счастью, Скидка … Читать дальше
 Затем признаки используются для поиска наилучшего или ближайшего подходящего соответствия среди различных хранящихся глифов.
Затем признаки используются для поиска наилучшего или ближайшего подходящего соответствия среди различных хранящихся глифов. Он имеет свои ограничения, поскольку существует практически неограниченное количество шрифтов и стилей почерка, и каждый отдельный тип не может быть учтен и сохранен в базе данных.
Он имеет свои ограничения, поскольку существует практически неограниченное количество шрифтов и стилей почерка, и каждый отдельный тип не может быть учтен и сохранен в базе данных.


 Например, BlueVine, финансовая технологическая компания, предоставляющая финансирование малому и среднему бизнесу, использовала Amazon Textract, облачный сервис OCR, для разработки продукта, с помощью которого малые бизнесы в США могут быстро получить доступ к кредитам по Программе защиты заработной платы (PPP) в рамках пакета мер по стимулированию экономики в условиях COVID-19. Amazon Textract автоматически обрабатывал и анализировал десятки тысяч форм PPP в день, благодаря чему BlueVine смогла помочь нескольким тысячам предприятий получить средства и сохранить более 400 000 рабочих мест.
Например, BlueVine, финансовая технологическая компания, предоставляющая финансирование малому и среднему бизнесу, использовала Amazon Textract, облачный сервис OCR, для разработки продукта, с помощью которого малые бизнесы в США могут быстро получить доступ к кредитам по Программе защиты заработной платы (PPP) в рамках пакета мер по стимулированию экономики в условиях COVID-19. Amazon Textract автоматически обрабатывал и анализировал десятки тысяч форм PPP в день, благодаря чему BlueVine смогла помочь нескольким тысячам предприятий получить средства и сохранить более 400 000 рабочих мест. Клиенты компании могут сфотографировать свой медицинский счет и отправить его через мобильное приложение nib. Amazon Textract автоматически обрабатывает эти изображения, что позволяет компании гораздо быстрее рассматривать заявки.
Клиенты компании могут сфотографировать свой медицинский счет и отправить его через мобильное приложение nib. Amazon Textract автоматически обрабатывает эти изображения, что позволяет компании гораздо быстрее рассматривать заявки.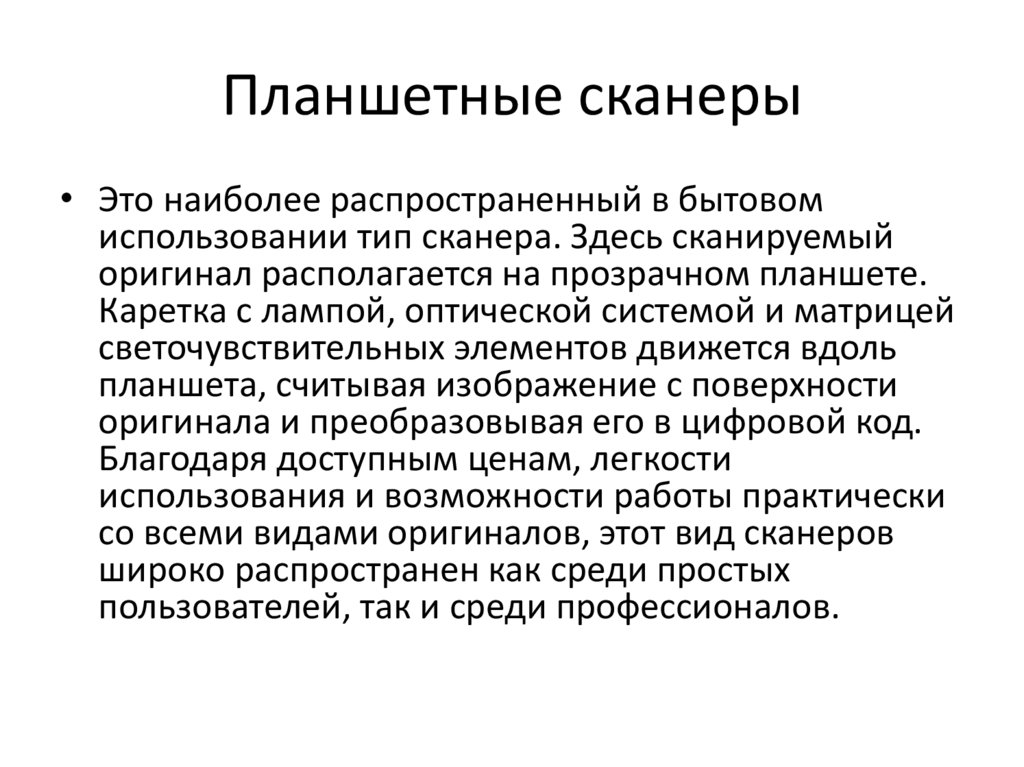 Сервис позволяет быстро считывать тысячи различных документов различных носителей и форматов. После извлечения информации из документов Amazon Textract присваивает уровень уверенности, что дает возможность принимать обоснованные решения о том, как использовать полученные результаты.
Сервис позволяет быстро считывать тысячи различных документов различных носителей и форматов. После извлечения информации из документов Amazon Textract присваивает уровень уверенности, что дает возможность принимать обоснованные решения о том, как использовать полученные результаты. Использование таких документов в их первозданном виде занимает много времени и средств. Кроме того, документы могут быть испорчены, перепутаны или потеряны.
Использование таких документов в их первозданном виде занимает много времени и средств. Кроме того, документы могут быть испорчены, перепутаны или потеряны. Этот параметр не имеет никакого отношения к механизму сканера и, если интерполяция все же нужна, то делать это лучше после сканирования с помощью хорошего графического пакета.
Этот параметр не имеет никакого отношения к механизму сканера и, если интерполяция все же нужна, то делать это лучше после сканирования с помощью хорошего графического пакета.  Соответственно в 42-битном сканере «шумовые» биты можно сдвинуть достаточно далеко, и в конечном оцифрованном изображении останется больше чистых тонов на канал цвета.
Соответственно в 42-битном сканере «шумовые» биты можно сдвинуть достаточно далеко, и в конечном оцифрованном изображении останется больше чистых тонов на канал цвета. Данная величина очень хорошо отделяет простые офисные сканеры, которые могут потерять детали, как в темных, так и светлых участках слайда и, тем более, негатива, от более профессиональных моделей. Как правило, для большинства планшетных сканеров данная величина лежит в пределах от 1.7D (офисные модели) до 3.4 D (полупрофессиональные модели).
Данная величина очень хорошо отделяет простые офисные сканеры, которые могут потерять детали, как в темных, так и светлых участках слайда и, тем более, негатива, от более профессиональных моделей. Как правило, для большинства планшетных сканеров данная величина лежит в пределах от 1.7D (офисные модели) до 3.4 D (полупрофессиональные модели). Важным моментом является программное обеспечение, прилагаемое к сканерам. Особое внимание следует уделить соответствию выбранного вами программного обеспечения тем задачам, которые вам придется решать с помощью сканера. Для рекламной деятельности необходима мощная программа с возможностями ручных настроек и с возможностью цветокалибрации сканера, а для сканирования текстов необходимо обратить внимание на совместимость с программой распознавания, что, как правило, обеспечивается соответствием драйвера сканера стандарту Twain.
Важным моментом является программное обеспечение, прилагаемое к сканерам. Особое внимание следует уделить соответствию выбранного вами программного обеспечения тем задачам, которые вам придется решать с помощью сканера. Для рекламной деятельности необходима мощная программа с возможностями ручных настроек и с возможностью цветокалибрации сканера, а для сканирования текстов необходимо обратить внимание на совместимость с программой распознавания, что, как правило, обеспечивается соответствием драйвера сканера стандарту Twain. синонимы оптического сканирования на сайте Thesaurus.com
синонимы оптического сканирования на сайте Thesaurus.com com без сокращений
com без сокращений
 Делани
Делани
 Его преимущества заключаются в стойкости к любым погодным условиям, предотвращении попадания в помещение посторонних звуков с улицы и эстетичном внешнем виде.
Его преимущества заключаются в стойкости к любым погодным условиям, предотвращении попадания в помещение посторонних звуков с улицы и эстетичном внешнем виде.




 Дублин – Матовая нержавеющая сталь
Дублин – Матовая нержавеющая сталь

 75.00.019/020
75.00.019/020 75.00.019/020
75.00.019/020
 Если вам нужно смоделировать фигурку, магическое существо, персонажа компьютерной игры, то это наилучший выбор.
Если вам нужно смоделировать фигурку, магическое существо, персонажа компьютерной игры, то это наилучший выбор. Ее создатели явно не являются сторонниками агрессивной маркетинговой стратегии. У нее даже нет официальной странички в Facebook или Twitter. Большая часть ее сообщества пришла из дискуссионного клуба MoI и по ссылкам в интернете.
Ее создатели явно не являются сторонниками агрессивной маркетинговой стратегии. У нее даже нет официальной странички в Facebook или Twitter. Большая часть ее сообщества пришла из дискуссионного клуба MoI и по ссылкам в интернете. В поисках недорогого сканера, для помощи в моделировании непростых д…
В поисках недорогого сканера, для помощи в моделировании непростых д… Вот с этой картинкой мы ходим по магазинам и пытаемся донести её консультантам, чтобы те показали на конкретный материал, удовлетворяющий нашу фантазию. Но бывает, что поклеив обои и выложив стенку декоративным камнем для внутренней отделки мы не видим того результата, который так хорошо смотрелся в нашей фантазии. А о стрессе, который связан с ремонтом лучше вообще не упоминать, а то придется пить успокоительное даже не начав.
Вот с этой картинкой мы ходим по магазинам и пытаемся донести её консультантам, чтобы те показали на конкретный материал, удовлетворяющий нашу фантазию. Но бывает, что поклеив обои и выложив стенку декоративным камнем для внутренней отделки мы не видим того результата, который так хорошо смотрелся в нашей фантазии. А о стрессе, который связан с ремонтом лучше вообще не упоминать, а то придется пить успокоительное даже не начав.
 Поддерживает Русский язык.
Поддерживает Русский язык.
 Простая в освоении и доступна на многих устройствах. Требует высокой производительности от системы. Для того чтобы разнообразить проекты необходимо покупать дополнительные инструменты.
Простая в освоении и доступна на многих устройствах. Требует высокой производительности от системы. Для того чтобы разнообразить проекты необходимо покупать дополнительные инструменты.
 Хидео изобрел многослойный подход к 3D-печати, который мы знаем сегодня, используя ультрафиолетовый свет и светочувствительные полимеры.
Хидео изобрел многослойный подход к 3D-печати, который мы знаем сегодня, используя ультрафиолетовый свет и светочувствительные полимеры. Это вносит определенную сложность и ограничения в процесс проектирования.
Это вносит определенную сложность и ограничения в процесс проектирования. Form 2 всегда была надежной машиной, и она всегда могла обеспечить надежную и высококачественную 3D-печать, но LFS продвигает игру еще дальше с легкие на ощупь опорные конструкции , позволяющие легко отделять готовые модели и детали от платформы сборки.
Form 2 всегда была надежной машиной, и она всегда могла обеспечить надежную и высококачественную 3D-печать, но LFS продвигает игру еще дальше с легкие на ощупь опорные конструкции , позволяющие легко отделять готовые модели и детали от платформы сборки. Освещение управляется через оптическую систему, которая содержит систему линз и зеркал . Лазерный луч направляется через оптическую систему, проходя через пространственный фильтр, прежде чем достичь платформы.
Освещение управляется через оптическую систему, которая содержит систему линз и зеркал . Лазерный луч направляется через оптическую систему, проходя через пространственный фильтр, прежде чем достичь платформы.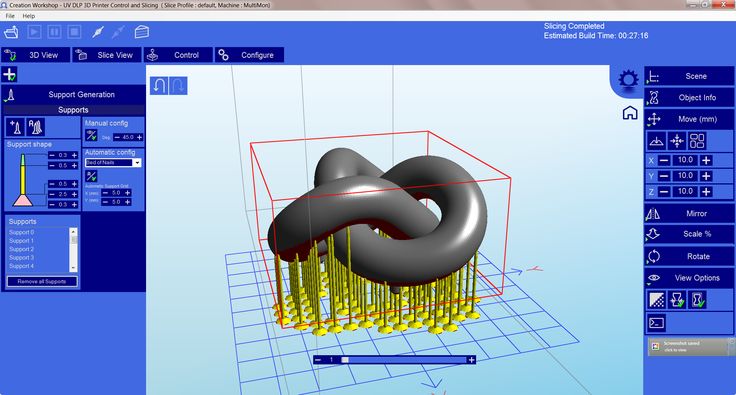
 Добавление второго лазера было абсолютно необходимо из-за большего объема сборки Form 3L, но, несмотря на это, Form 3L также строит модели немного быстрее.
Добавление второго лазера было абсолютно необходимо из-за большего объема сборки Form 3L, но, несмотря на это, Form 3L также строит модели немного быстрее. Это позволяет добавлять пигмент в любую смолу Formlabs. На выбор предлагается 16 цветов, что позволяет печатать модели и детали в сплошном цвете, чтобы сократить потребность в покраске и постобработке.
Это позволяет добавлять пигмент в любую смолу Formlabs. На выбор предлагается 16 цветов, что позволяет печатать модели и детали в сплошном цвете, чтобы сократить потребность в покраске и постобработке.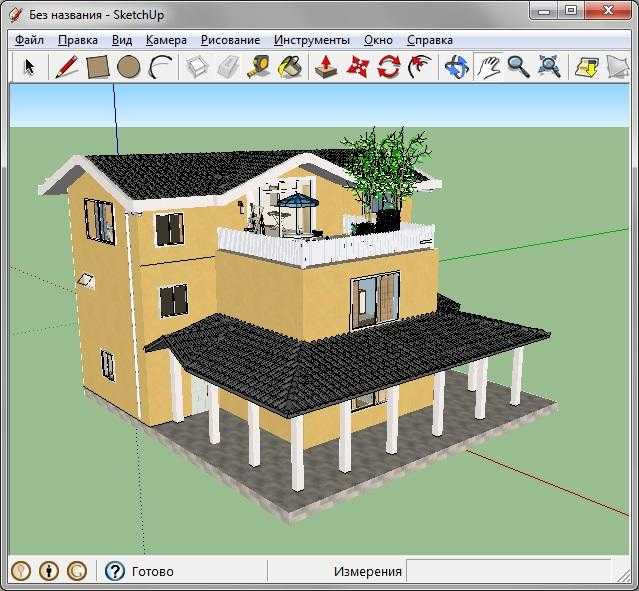 Это дает вам возможность установить связь с машиной и узнать, как выглядит интерфейс и как он реагирует на команды.
Это дает вам возможность установить связь с машиной и узнать, как выглядит интерфейс и как он реагирует на команды. Однако для работы его необходимо загрузить на компьютер. Он доступен для ПК или Mac.
Однако для работы его необходимо загрузить на компьютер. Он доступен для ПК или Mac. Юридический центр предлагает ряд экспериментальных курсов в клиниках, полевых стажировках и симуляционных курсах, и студенты должны пройти не менее шести кредитных часов этих экспериментальных курсов до выпуска. Мы приглашаем вас изучить эти веб-страницы, чтобы узнать обо всех экспериментальных возможностях, доступных в ваши 2L и 3L годы. ВСЕ КУРСЫ, перечисленные на этих веб-страницах, соответствуют шести кредитным часам экспериментальных курсов, необходимых для получения диплома.
Юридический центр предлагает ряд экспериментальных курсов в клиниках, полевых стажировках и симуляционных курсах, и студенты должны пройти не менее шести кредитных часов этих экспериментальных курсов до выпуска. Мы приглашаем вас изучить эти веб-страницы, чтобы узнать обо всех экспериментальных возможностях, доступных в ваши 2L и 3L годы. ВСЕ КУРСЫ, перечисленные на этих веб-страницах, соответствуют шести кредитным часам экспериментальных курсов, необходимых для получения диплома. Студенты проходят практику в местных судах, в административных органах и других местах. Юридическая клиника — это самостоятельный офис юридических услуг, расположенный в Юридическом центре. Студенты третьего курса имеют право заниматься юридической практикой в соответствии с Правилом XX Верховного суда Луизианы, а студенты 2L помогают преподавателям юридического центра представлять интересы реальных клиентов. Предложения клиник включают иммиграционную клинику (не будет предлагаться осенью 2021 г.), клинику защиты несовершеннолетних, клинику гражданского посредничества, клинику условно-досрочного освобождения и повторного въезда и клинику обвинения. Осенью 2021 года появится новая возможность — клиника неправомерных судимостей. В будущем планируется больше клинических предложений.
Студенты проходят практику в местных судах, в административных органах и других местах. Юридическая клиника — это самостоятельный офис юридических услуг, расположенный в Юридическом центре. Студенты третьего курса имеют право заниматься юридической практикой в соответствии с Правилом XX Верховного суда Луизианы, а студенты 2L помогают преподавателям юридического центра представлять интересы реальных клиентов. Предложения клиник включают иммиграционную клинику (не будет предлагаться осенью 2021 г.), клинику защиты несовершеннолетних, клинику гражданского посредничества, клинику условно-досрочного освобождения и повторного въезда и клинику обвинения. Осенью 2021 года появится новая возможность — клиника неправомерных судимостей. В будущем планируется больше клинических предложений. Расположение юридического центра в столице штата Батон-Руж дает огромные преимущества для размещения студентов в государственных и местных государственных учреждениях и судах, где студенты могут испытать реальную юридическую практику в структурированной академической среде. Юридический центр также предлагает студентам возможность пройти стажировку во время летней сессии после первого и второго года обучения в юридической школе. Летнее стажировка Студенты могут участвовать в онлайн-классе и работать в юридических конторах или судейских коллегиях в любой точке мира. Многие выбирают место работы в своем родном городе или месте, где они в конечном итоге хотели бы начать свою юридическую карьеру.
Расположение юридического центра в столице штата Батон-Руж дает огромные преимущества для размещения студентов в государственных и местных государственных учреждениях и судах, где студенты могут испытать реальную юридическую практику в структурированной академической среде. Юридический центр также предлагает студентам возможность пройти стажировку во время летней сессии после первого и второго года обучения в юридической школе. Летнее стажировка Студенты могут участвовать в онлайн-классе и работать в юридических конторах или судейских коллегиях в любой точке мира. Многие выбирают место работы в своем родном городе или месте, где они в конечном итоге хотели бы начать свою юридическую карьеру.