Модель на круг 125мм и мощностью 1000Вт. Отлично подходит как для профессиональных, так и для бытовых работ по резки, шлифовки или зачистке металла и камня. На долговечность влияет ряд конструктивных улучшений: улучшена защита от пыли, улучшен прижимной механизм щеток и улучшено охлаждение. А эргономичный дизайн данной модели с тонкой ручкой и небольшой вес инструмента, позволяет работать комфортно даже одной рукой или на высоте. Модель оснащена блокировкой шпинделя для быстрой смены оснастки и уменьшенным корпусом редуктора для более глубоких резов.
Параметры сети питания
Напряжение и частота электросети
220В, 50 Гц
Номинальная потребляемая мощность, (Вт)
1000
Номинальная потребляемый ток в сети 220В (А)
4. 5
Характеристики УШМ
Максимальный диаметр диска (мм)
125
Диаметр посадочного отверстия диска (мм)
22
Диаметр резьбы шпинделя (мм)
14
Частота вращения диска на холостом ходу (об/мин)
11000
Функции УШМ
Плавный пуск
Да
Ограничение пускового тока
Да
Фиксация выключателя
Да
Регулировка оборотов
Нет
Поворотная задняя рукоятка
Нет
Защита от повторного включения
Нет
Поддержание оборотов под нагрузкой
Нет
Защита от перегрева
Нет
Защита от перегрузки
Да
Защита от заклинивания
Нет
Антивибрационная рукоятка
Нет
Гарантия
Гарантия производителя
12 месяца
Расширенная гарантия
Нет
Гарантия магазина
2 недели
Ваше имя:
Ваш отзыв:
Примечание: HTML разметка не поддерживается! Используйте обычный текст.
Оценка: Плохо
Хорошо
Защита от роботов
Введите код в поле ниже
STURM AG9012T. Честные отзывы. Лучшие цены.
На этой странице вы найдёте описание, продавцов и цены, чтобы купить дешевле, видеообзоры и честные отзывы о болгарке STURM AG9012T. И можете оставить свой отзыв о модели в комментариях внизу страницы.
Быстрый Переход к Нужному Месту:
Технические характеристики
Мощность, Вт
1000
Напряжение, В
220
Диаметр диска, мм
125
Посадочный диаметр, мм
22.2
Электр. регулировка оборотов
нет
Число оборотов, об/мин
11000
Суперфланец
нет
Быстрозажимная гайка SDS
нет
Наличие виброручки
нет
Комплектация
коробка
Плавный пуск
нет
Вес, кг
2,17
Резьба шпинделя
М14
Блокировка шпинделя при заклинивании диска
нет
Длина кабеля, м
2
Особенности модели
Углошлифовальная машина Sturm AG9012T оснащена двигателем на 1000 Вт, который развивает скорость до 11000 об/мин. Блокировка шпинделя служит для простой и безопасной смены шлифкругов. Дополнительная рукоятка упрощает управление инструментом. Установить ее можно слева или справа, в зависимости от предпочтения оператора.
Быстрая смена оснастки Кнопка блокировки шпинделя позволяет менять оснастку без использования дополнительного инструмента.
Удобство пользования Кнопка включения фиксируется в положении пуска, что делает длительную работу неутомительной.
Комфортная работа Углошлифовальная машина Sturm AG9012T оснащена дополнительной рукоятью, которая может устанавливаться как справа, так и слева.
Работает от сети: 220 В;
Вентиляционные отверстия;
Защитный кожух;
Поставляется с дополнительным комплектом щеток.
Стандартная комплектация
Производитель оставляет за собой право без уведомления представителей менять характеристики, внешний вид, комплектацию товара и место его производства. Будьте внимательны при покупке!
Углошлифовальная машина;
Боковая рукоять;
Ключ;
Картонная коробка.
Видео
Отзывы и обзоры
Смотрите видео (выше) и обзоры (ниже), они часто лучше текстовых отзывов. Прочитать больше отзывов или оставить свой вы можете в комментариях к этой странице. Спасибо за ваш отзыв или оценку!
Антон
Огонь инструмент… брал для дома, за такие деньги очень качественный инструмент. Удобен в использовании при умеренной работе не перегревается. Хорошо собран и протянут,много смазки в редукторе.
Илья
Маленькая, очень удобно лежит в руке. Очень легкая, рука не устает, удобно работать даже одной рукой. Пользовался в основном для мелких работ по металлу, недавно алмазным диском штробу в стене из блоков вырезал (надо было в сауну кабель протянуть, перфоратором не вариант)- справилась отлично.
Роботами называются автоматические машины, которые могут быть или стационарными, или передвижными, и спроектированы по образу и подобию различных живых организмов.
С точки зрения своей конструкции они являются весьма сложными механизмами, в которых на практике реализовываются достижения технического прогресса в таких областях, как электроника, точная механика, оптика, пневмоавтоматика и многое другое.
В практике современного производства роботы используются для того, чтобы осуществлять различные операции по тем программам, которые в них заложены, и которые в большинстве случаев выполняются людьми.
Конструкции роботов
Одной из важнейших характеристик роботов является то, что они оснащены всевозможными датчиками с которых снимается информация о внешней среде и в зависимости от результатов обработки этих данных, корректируют свои действия.
В большинстве случаев роботы состоят из таких частей, как манипуляторы, имеющие несколько степеней свободы, специальных приводов, обеспечивающих их передвижение в пространстве, а также перепрограммируемых устройств управления.
В общем и целом можно считать, что любой современный робот представляет собой ни что иное, как единый, нацеленный на выполнение определенных функций, механизм, состоящее из определенных блоков, каждый из которых имеет свое собственное функциональное назначение.
Несущий корпус робота
Тем основным элементом, в котором располагаются все остальные детали и механизмы любого робота, является его корпус. В большинстве случаев он является также несущей, силовой составляющей всей конструкции, которая предназначается для того, чтобы обеспечить необходимое взаимное расположение всех электрических, кинематических и других звеньев механизмов роботов. Помимо этого корпус во многих случаях является защитой их от воздействия неблагоприятных внешних факторов окружающей среды, повреждений механического характера и т.п. Он может быть как внешним, так и внутренним, и во втором случае он именуется каркасом.
Как правило, корпуса современных роботов изготавливаются из таких материалов, как нержавеющая или обычная конструкционная сталь, а также пластмассы и алюминиевые сплавы. Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Валы и оси роботов
В современных механизмах роботов широко используются такие детали, как оси, валы, втулки, штоки, шестерни, цилиндры, рычаги и кулачки.
Для изготовления штоков, осей и валов механизмов роботов используются чаще всего стали Ст40 и Ст45, а также легированные стали 1Х18Н9Т и 40Х. Кроме того, в отдельных случаях они вытачиваются из цветных сплавов. Эти изделия согласно действующим техническим требованиям, по такому параметру, как точность посадочных цилиндрических поверхностей должны соответствовать 6 – 9 квалитету, а в отдельных случаях – 5 квалитету.
Оси и валы механизмов роботов служат для того, чтобы на них устанавливать шкивы, звездочки цепных передач, зубчатые колеса и другие детали вращения. При этом валы, вращаясь, транслируют крутящий момент, а оси, в отличие от них, могут быть как подвижными, так и неподвижными.
И оси, и валы являются широко распространенными элементами, используемыми в конструкции современных роботов. Основной сферой применения осей является соединение рабочих элементов, которые входят в состав механических захватных устройств. Помимо этого они являются наиболее типичными компонентами практически всех механизмов роботов.
Опоры для вращательного и поступательного движения
В качестве опор для валов и осей, которые имеются в конструкции механизмов роботов, служат подшипники. В зависимости от того, какая именно нагрузка на них оказывается, они могут быть упорными, радиальными или радиально-упорными. Кроме того, в зависимости от степени трения они подразделяются на подшипники качения и скольжения.
Направляющие для поступательного движения
Эти конструкции предназначаются для того, чтобы обеспечивать прямолинейное движение тех элементов, которые наличествуют в конструкции механизмов роботов. Их чаще всего можно встретить в манипуляторах промышленного назначения.
Основными составными частями прямолинейных направляющих являются направляющая дорожка и ведомая часть. Что касается направляющих дорожек, то они бывают с трением скольжения и с направляющими качения. Во втором случае движение обеспечивается за счет наличия таких деталей, как ролики, шарики и валы.
Пружины в механизмах роботов
Пружины в механизмах современных промышленных роботов используются для того, чтобы обеспечить демпфирование и ограничить при этом ход различных подвижных звеньев. Кроме того эти детали широко применяются для того, чтобы сглаживать неравномерности, возникающие при трансляции крутящего момента.
Муфты для механизмов роботов
Чтобы должным образом передать мощность от ведущего вала к валу ведомому используются такие конструкции, как муфты.
Те муфты, которые применяются в современных роботах, должны соответствовать общим требованиям, предъявляемым к механизмам такого рода. Им надлежит иметь повышенную надежность, обеспечивать минимально возможные деформации сопряжения, иметь как можно более компактные размеры и небольшую массу. Что касается типа той или иной муфты, используемой в современном роботе, то его выбор зависит от таких факторов, как требуемая точность позиционирования, жесткость конструкции, а также необходимость установки устройств в определенных пространственных положениях и обеспечение доступа к различным узлам и деталям для их обслуживания и ремонта.
Пневматические приводы роботов
Пневматические приводы, используемые в конструкции современных промышленных роботов, – это определенная комбинация неких устройств, которые тесно взаимосвязаны между собой и предназначены для того, чтобы приводить в движение различные рабочие звенья и рабочие органы. Пневматическими приводами оборудуется значительная часть роботов, поскольку они обладают отличными динамическими характеристиками, просты по своей конструкции, имеют высокое быстродействие, обходятся в производстве и эксплуатации недорого, и при этом весьма надежны.
Электромеханические приводы роботов
Основным звеном всех таких приводов является электродвигатель. Он может быть любого из распространенных на сегодняшний день типов: постоянного тока, шаговым, вентильным, асинхронным.
Все приводы, которые используются в современных промышленных роботах, должны соответствовать целому ряду довольно жестких требований относительно таких параметров, как габариты и масса, возможность выдерживать высокие нагрузки, надежность, стоимость и удобство в эксплуатации.
Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
(Типы роботов)
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
Назначения машины;
Условий ее работы;
Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
Голова — верхняя часть конструкции;
Торс — основной каркас робота;
Руки-манипуляторы с силовыми механизмами;
Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т.е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.
(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
В инфракрасном диапазоне;
В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т. п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
Распознавание объектов;
Распознавание речи;
Распознавание движений, жестов;
Самообучение на основании получаемой информации;
Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
Прямое выполнение конкретных команд оператора;
Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.
(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
Автономным — аккумуляторы, солнечные батареи;
Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
Кистевого;
Предплечья;
Плечевого.
(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).
(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
Механические;
Электрические;
Гидравлические;
Пневматические;
Гибриды (электромеханические, гидромеханические и т. д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.
(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
С высокой точностью определять и изменять угол положения вала;
Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке
Тип робота: андроид
Способ управления: автономный
Задача: преодолеть лестничный пролет
После включения питания загружается ЦПУ, которая проводит проверку всех систем.
После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
Равновесие машины поддерживает гироскоп.
После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
Все о робототехнике
Робототехника — это пересечение науки, технологии и инженерии, которое создает машины, называемые роботами. Робот — это программируемая машина, которая может помогать людям или имитировать их действия. Роботы изначально создавались для выполнения монотонных задач, таких как сборка автомобилей на конвейере, но с тех пор они расширились за пределы своего первоначального использования для выполнения таких задач, как тушение пожаров, уборка домов и помощь в сложных операциях. Роботы имеют разные уровни автономии: от управляемых человеком ботов, выполняющих задачи, полностью контролируемые человеком, до полностью автономных ботов, выполняющих задачи без каких-либо внешних воздействий.
По мере развития технологий расширяется и область применения робототехники. Например, в 2005 году 90% всех роботов можно было найти за сборкой автомобилей на автомобильных заводах. Эти роботы в основном представляют собой механические руки, предназначенные для сварки или привинчивания определенных частей автомобиля. Сегодня существует развитое и расширенное определение робототехники.
Проектирование роботов — это создание плана или соглашения по созданию робота или роботизированной системы. Эти планы могут быть архитектурными чертежами, инженерными чертежами, рабочими процессами и принципиальными схемами. Термин «дизайн» имеет разное значение в разных областях. В некоторых случаях, как в инженерном и графическом дизайне, дизайном может считаться и непосредственное построение объекта. В этой статье рассматриваются характеристики роботов, элементы конструкции роботов и некоторые аспекты проектирования.
Изображение предоставлено Shutterstock.com/Gorodenoff
Характеристики робота
В то время как мир робототехники растет, у каждого робота есть определенные характеристики. Например, у всех роботов есть какая-то механическая конструкция или механизмы. Механический аспект робота позволяет ему выполнять задачи в среде, для которой он предназначен.
Роботам нужны электрические компоненты, которые управляют механизмами и приводят их в действие. По сути, для питания большинства роботов требуется электрический ток, такой как батарея.
Роботы содержат хотя бы какой-то уровень компьютерного программирования. Без набора кода, говорящего ему, что делать, робот был бы частью простого механизма. Кодирующий робот дает ему возможность знать, когда и как выполнять задачу.
Механизмы
Поскольку роботы должны иметь возможность двигаться, проектирование механизмов, облегчающих это движение, или аспект машиностроения, имеет решающее значение. В то время как машиностроение в более широком смысле представляет собой проектирование машин, разработчики роботов уделяют особое внимание двигателям и редукторам, чтобы обеспечить желаемое движение своих роботов.
Механический аспект обычно включает прототипирование отдельных движущихся частей перед сборкой всего робота. Уровень сложности зависит от предполагаемого робота и того, как он движется.
Электроника
Еще одним важным навыком, необходимым для создания роботов, является схемотехника или электроника робота. Понимание электроники и микроконтроллеров позволяет выбрать подходящие двигатели, компоненты и мощность для разрабатываемого робота. Кроме того, необходимо учитывать функциональность и физические свойства деталей.
Элементарное понимание схем позволяет инженерам построить простого робота, используя онлайн-поддержку, документацию и наборы, доступные в сообществе производителей роботов.
Программирование
После того, как в проекте будет электрически исправная схема и механизмы, готовые к движению, можно запрограммировать микроконтроллеры, используемые в схеме. Микроконтроллер действует как мозг робота, которому нужны инструкции. Выбранный микроконтроллер определяет используемый язык программирования и то, как эта программа загружается в микроконтроллер.
Изготовление
Изготовление — последний шаг в строительстве. На этом этапе компоненты собираются в корпус или корпус, изготовленный для робота. С появлением доступных цифровых производственных инструментов, таких как лазерные резаки, фрезерные станки с ЧПУ и 3D-принтеры, разработчики роботов-любителей могут создавать изысканные корпуса, которые выглядят профессионально, без дорогостоящих накладных расходов на крупные производственные операции.
Конструкция корпуса робота и выбранные материалы зависят от типа изготавливаемого робота и его назначения. В то время как корпуса практичны для покрытия механизмов и защиты драгоценной электроники, находящейся внутри, инженеры также могут использовать тела роботов, чтобы придать им индивидуальность, выразить предполагаемое взаимодействие и дать отзыв об использовании робота.
Особенности конструкции робота
Конструктивные особенности робота включают в себя все, что влияет на конструкцию робота, например, пересечение окружающей среды, мощность, необходимую для его движения, органы чувств, необходимые для выполнения желаемых задач, материалы, используемые для изготовления шасси, и желаемую эстетику.
Окружающая среда
Если робот движется, важным фактором является местность, по которой он будет перемещаться. Может потребоваться защита от пыли, воды или внешних воздействий. Возможности влияют на выбор материалов, конструкцию механизмов робота и форму корпуса.
Мощность
Способ питания робота зависит от его назначения. Например, батареи обеспечивают большую свободу передвижения, но шнур питания может быть более эффективным, если роботу не нужно далеко перемещаться. Каждому двигателю, датчику, процессору и т. д. требуется определенное количество энергии, поэтому необходимо определить, сколько энергии потребляет каждый компонент и как долго робот должен работать, чтобы учитывать требования к мощности в общей конструкции. Слишком мало электричества, и детали не будут работать, а слишком много электричества может поджарить хрупкие компоненты.
Материалы
Материальные соображения включают такие вопросы, как: сколько будет весить робот? Существуют ли практичные точки крепления датчиков? Насколько надежен аккумулятор и легко ли к нему получить доступ? Тело робота может быть настолько простым или сложным, насколько это необходимо, но, возможно, лучшие конструкции роботов обеспечивают гибкость, облегчая гибкое прототипирование и сборку.
Чувства
Если роботу необходимо избегать столкновений, он должен иметь датчик приближения. Другим могут потребоваться другие датчики, такие как фотоэлементы, чтобы следить за солнцем, или датчики движения, чтобы включать его, когда кто-то находится поблизости. Бесчисленные датчики могут взаимодействовать с роботом. Необходимо учитывать всю информацию, которую робот должен получить из физической среды, и то, как эти данные используются для обеспечения движения робота по назначению.
Стиль
После того, как все утилитарные требования выполнены, можно подумать о стиле. Многие дизайнеры роботов добавляют в свои творения индивидуальный стиль. Потенциальные пользователи или клиенты могут предпочесть более гуманоидного робота или более симпатичного робота. Все зависит от назначения робота.
Заключение
В этой статье объясняются важные характеристики конструкции робота и рассматриваются соображения, которые необходимо учитывать при проектировании робота. Чтобы найти дополнительную информацию о робототехнике и других аспектах промышленности, посетите сайт Thomasnet.com, где вы найдете информацию о более чем 500 000 коммерческих и промышленных поставщиков.
Ведущие производители и поставщики компонентов робототехники в Северной Америке
Восприятие клиентов и стратегия продукта
Жизненный цикл промышленной продукции
Типы инженеров
Ведущие инженерные компании США
Общие инженерные классы и уровни опыта
12 известных женщин-инженеров и изобретателей США
Еще от Инжиниринг и консалтинг
КАК ПРОЕКТИРОВАТЬ РОБОТА 81001
ПРОЦЕСС ПРОЕКТИРОВАНИЯ РОБОТА
Что такое проектирование роботов?
Проект робототехники — создание плана или соглашения по конструированию робота или роботизированной системы (как в архитектурных чертежах, инженерном чертеже, рабочем процессе, принципиальных схемах). Дизайн имеет разные коннотации в разных областях. В некоторых случаях непосредственное конструирование объекта (например, в гончарном деле, машиностроении, менеджменте, графическом дизайне) также считается дизайном.
Более формально конструкция робота определяется как; ( сущ. ) спецификация робота, представленная разработчиком робота, предназначенная для достижения целей в конкретной роботизированной среде с использованием набора примитивных компонентов, удовлетворяющая набору требований с учетом ограничений; ( глагол, переходный ) для создания конструкции робота в роботизированной среде
Этапы ПРОЦЕССА ПРОЕКТИРОВАНИЯ РОБОТА Структура для разработчиков роботов. RSF — это совокупность решений, состоящих из моделей, принципов и дорожных карт, разработанных для стандартизации качества процессов разработки роботов.
1- ОПРЕДЕЛИТЕ ПРОБЛЕМУ и ОПРЕДЕЛИТЕ ЗАДАЧИ
Вам необходимо определить, какую проблему вы пытаетесь решить, и цели, которых вы хотите достичь , прежде чем пытаться спроектировать и построить робота. Потратьте время на изучение ряда различных ситуаций, и как только вы решите, какова ситуация, и точно поймете, в чем проблема, напишите краткое описание проекта в журнале (это станет вашим рабочим документом, когда вы будете работать над своим проектом). robot.)
Часто разработчики роботов и инженеры не придумывают идею самостоятельно, а сталкиваются с проблемами клиента, общества или окружающей среды, которые необходимо решить для удовлетворения основной «потребности». ” Без четкое определение этой необходимости и целей , процесс инженерного проектирования не может начаться. Много времени и карьеры было потрачено впустую в погоне за неопределенной целью.
Шаг 1 представляет собой краткое изложение, которое объясняет — проблему, которую необходимо решить — и цели, которые необходимо достичь.
Проблема должна быть точно и реалистично определена, чтобы начать процесс ее решения. 1. Получите четкое представление о Параметры проблемы. 2. Составьте список целей и расположите их в порядке важности . 3. Определите Ограничения проблемы. 4. Много раз робот не может сделать все, что представляет проблема. Важно, чтобы уделял первоочередное внимание и проектировал машину, которая может делать большинство вещей и делать несколько вещей очень хорошо.
2-ИССЛЕДОВАНИЯ и МОЗГовой ШТОРМ
Исследования:
Написав краткое изложение, теперь вы готовы собирать информацию . Сначала вам нужно решить, какая информация вам нужна. Это будет отличаться от проекта к проекту, а также будет зависеть от объема информации и знаний, которые у вас уже есть.
Какова практическая функция дизайна? – Что должен делать мой робот? Практические функции конструкции могут включать:
• движение: Как робот будет двигаться в своей среде? • манипулирование: Как робот будет перемещать или манипулировать другими объектами в своей среде? • энергия: Как питается робот? • интеллект: Как «думает» робот? • обнаружение: Как мой робот будет «узнавать» или выяснять, что находится в его окружении?
Исследования должны быть целенаправленными и включать новые идеи и тщательное изучение старых похожих идей. Иногда старые идеи оказываются лучшими. Вы когда-нибудь слышали поговорку: «Не изобретайте велосипед?» Старые идеи, которые потерпели неудачу, иногда становятся отличными золотыми приисками для исследований; эта идея могла потерпеть неудачу из-за отсутствия новых технологий, которые могут существовать сейчас.
— Изучение других решений тех же и подобных проблем, — Определение конкретных деталей конструкции, которые должны быть удовлетворены, — Определение возможных и альтернативных проектных решений — Планирование и проектирование соответствующей конструкции, включая чертежи
Мозговой штурм:
Первый шаг — начать рисовать , чтобы получить идеи на бумаге. Создание набросков и рисование от руки позволяет вам задействовать свою творческую сторону. Важно иметь точные и полные эскизы, чтобы воплотить идею в чертежи и модели от руки или САПР. Эта фаза также позволяет виртуальное прототипирование или тестирование продукта на компьютере. Вы можете найти потенциальные, а иногда и дорогостоящие недостатки в проекте еще до того, как будет построен реальный макет.
Рисуйте и обсуждайте идеи в группах . Нет идей — это плохие идеи. Важно учитывать все подходы к проблеме. То, что казалось неосуществимым или нелогичным в начале, может оказаться правильным в конце. Не так много проектов проходят разработку с первой попытки или на основе лучшей на тот момент идеи. Конечный проект обычно состоит из набора идей ; некоторые из них считались слишком рискованными, дорогостоящими или просто безумными.
Решения должны быть разделены в соответствии с их плюсами и минусами. Это задание лучше выполнять в группе. Мозговой штурм поощряет максимальное количество вкладов разных уровней опыта и различных подходов к проблеме. Альтернативные решения могут быть проанализированы и каталогизированы в соответствии с достоинствами и возможностями использования. После того, как эти идеи были сведены к приемлемому числу, эти числа необходимо обработать, чтобы оценить вероятность и стоимость успешного результата с использованием отдельных решений. Здесь вступают в игру более важные факторы, такие как здравый смысл и инстинкт. Если это кажется неправильным, не делайте этого.
3-СОЗДАТЬ ПРОТОТИП
Лучший способ узнать, будет ли проект работать в реальных условиях, — построить прототип .
На этом этапе необходимы эскизы и примечания . (Возможно, для этого шага вы можете создать прототипы с помощью LEGO. Создав прототип Lego, сделайте его цифровое изображение.) Распечатайте изображение и сделайте пометки под изображением в своем журнале. Определившись с решением, вернитесь к составленному вами списку спецификаций. Убедитесь, что каждая спецификация удовлетворена.
Если первоначальный проект и прототип не полностью решают проблему или технические характеристики, не соответствуют проектным параметрам или остаются в рамках приемлемой стоимости, дизайнер может « вернуться к чертежной доске » (или компьютеру). В процессе инженерного проектирования есть петля, позволяющая вернуться к дизайну и уточнить или перепроектировать.
Теперь пришло время сделать несколько рабочих чертежей. Эти чертежи помогут вам, когда вы начнете собирать своего робота. (Здесь опять-таки LEGO и цифровая камера могут быть вашими лучшими друзьями.) Вы можете делать свои рисунки вручную или использовать программу для рисования на компьютере, чтобы помочь вам.
4-СОБЕРИТЕ РОБОТА
В процессе сборки необходимо учитывать материалы, процессы, ограничения конструкции и стоимость . Компании вкладывают значительные средства в фабрики и инфраструктуру для создания своих проектов, поэтому, чем эффективнее был выполнен дизайн, тем лучше будет сборка. Как только процесс сборки начался, компания может начать окупать свои инвестиции в весь процесс проектирования за счет маркетинга и продажи продукта.
5-ТЕСТ ВАШЕГО РОБОТА
По мере продвижения строительных работ и начала формирования конструкции вы автоматически будете проводить испытания конструкции.
На этой странице вы найдёте описание, продавцов и цены, чтобы купить дешевле, видеообзоры и честные отзывы о генераторе CHAMPION GG3000. И можете оставить свой отзыв о модели в комментариях внизу страницы.
Быстрый Переход к Нужному Месту:
Технические характеристики
Вес, кг
40,1
Напряжение, В
220
Стартер
ручной стартер
Max мощность, кВт
2,5
Емкость топливного бака, л
15
Мощность номинальная при 220 В, кВт
2,3
Альтернатор
синхронный
Модель двигателя
OHV
Автозапуск (АВР)
нет
Свеча зажигания
F7RTC/CHAMPION RN6YC/NGK BPR7ES
Дисплей
нет
Обмотка альтернатора двигателя
алюминий
Тип кожуха
открытый
Вид топлива
бензин
Объем масляного бака, л
0. 6
Мощность максимальная при 220 В, кВт
2.5
Эл. выходы 380/220/12, шт
-/2/1
Объем двигателя, см?
196
Мощность двигателя
3.4 кВт, 4.62 л.с.
Число оборотов, об/мин
3000
Аккумулятор в комплекте
нет
Расход топлива, л/ч
1.4
Тип двигателя
4-х тактный
Степень защиты
IP23
Сила тока розеток 380/220/12, А
-/16/8.3
Контроль напряжения
AVR
Колеса и ручки
нет
Индикатор уровня топлива
да
Счетчик моточасов
нет
Выход 12V
да
Датчик масла
да
Тип электростанции
мобильные
Особенности модели
Генератор Champion GG3000 способен воспринимать как активную (чайник, утюг, электроплита), так и реактивную (холодильник, дрель, компрессор, т. е. оборудование имеющее двигатель или конденсатор) нагрузки суммарной мощностью не более 2300 Вт (с учетом запаса мощности). Используется в качестве аварийного источника питания. Для качественной работы двигателя рекомендуется использовать неэтилированный бензин. Агрегат устанавливают на открытом воздухе, обеспечивая при этом защиту от атмосферных осадков и прямых солнечных лучей. Диапазон рабочих температур генератора — от -15 до +40 0С при относительной влажности воздуха до 90%. Важно отметить, что перед использованием корпус электростанции необходимо заземлить (сопротивление контура не менее 4 Ом).
Быстрый доступ Все органы управления и контроля, а именно: вольтметр, выключатели зажигания и сети, клеммы подключения и заземления, индикатор работы агрегата, а также розетки на 220 В находятся у оператора под рукой — на передней панели устройства. Снижение вибраций За счет демпферов максимально гасятся вибрации, неизбежно возникающие во время работы генератора Champion GG3000, что значительно увеличивает его срок службы.
Эффективное охлаждение двигателя;
Легкое и быстрое зажигание;
Долгое время беспрерывной работы;
Наличие датчика уровня масла;
Быстрый слив масла;
Жесткая рамная конструкция;
Коэффициент мощности — 1;
Долгий срок эксплуатации.
Стандартная комплектация
Производитель оставляет за собой право без уведомления представителей менять характеристики, внешний вид, комплектацию товара и место его производства. Будьте внимательны при покупке!
Генератор;
Упаковка.
Видео
Отзывы и обзоры
Смотрите видео (выше) и обзоры (ниже), они часто лучше текстовых отзывов. Прочитать больше отзывов или оставить свой вы можете в комментариях к этой странице. Спасибо за ваш отзыв или оценку!
Глеб
С момента покупки генератора, понял, что Чампион действительно оказался таковым во всех смыслах. Расход примерно такой же как заявляет производитель, не заметил существенной разницы. Из минусов, как мне показалось, ощутимый шум, но если поставить аппарат не под ухом, а дальше, то проблема будет решена. В любом, случае, спасал меня не раз, и даже без вопросов работает несколько газов подряд. Общую максимальную нагрузку тянет на 100%. И при небольшой минусовой температуре заводится легко.
Максим
Брал бензиновую электростанцию для сезонного использования на даче. Посчитать мощность было не сложно, взял с запасом. За 2 года использования аппарат champion зарекомендовал себя с хорошей стороны. Расход, наверное, больше, чем у дизельного, но так как я включаю его от случая к случаю, все расходы не заметны. А так выходит примерно 1.5 л в час. Сильного шума я не наблюдал, по крайней мере, меня включенный генератор не напрягает. Из бонусов хочется отметить индикатор перегрузки, так что всегда можно хватает ли мощности у него или нет.
Отзывы о бензиновом генераторе Champion GG3000 от реальных покупателей
Всего отзывов: 5
Оставить отзыв
Средний рейтинг
5
1 отзыв
4
2 отзыва
3
2 отзыва
2
0 отзывов
1
0 отзывов
Михаил Вуланов
Оценка/рейтинг:
2017-10-04
Достоинства
Заводится просто, пока работает
Недостатки
Очень шумный, бензин жрёт что трактор
Общее впечатление
Недоволен я этим генератором. Два недостатка, которые серьезные. Первый это его тарахтение, оочень громкий, за пару часов не знаешь куда бежать. Надо какую-то будку мастерить. Второй это его дикая прожорливость.В инструкции сказано, что 1,2 литра при максимальтной нагрузке. А мой бегемот 2 литра при малой нагрузке лопает, и ещё просит, а бензинчик нынче дорог!
Ежик без ножек
Оценка/рейтинг:
2017-08-22
Достоинства
все устраивает
Недостатки
вроде нет
Общее впечатление
С момента покупки генератора, понял, что Чампион действительно оказался таковым во всех смыслах. Расход примерно такой же как заявляет производитель, не заметил существенной разницы. Из минусов, как мне показалось, ощутимый шум, но если поставить аппарат не под ухом, а дальше, то проблема будет решена. В любом, случае, спасал меня не раз, и даже без вопросов работает несколько газов подряд. Общую максимальную нагрузку тянет на 100%. И при небольшой минусовой температуре заводится легко, а вот…
Брал бензиновую электростанцию для сезонного использования на даче. Посчитать мощность было не сложно, взял с запасом. За 2 года использования аппарат champion зарекомендовал себя с хорошей стороны. Расход, наверное, больше, чем у дизельного, но так как я включаю его от случая к случаю, все расходы не заметны. А так выходит примерно 1.5 л в час. Сильного шума я не наблюдал, по крайней мере, меня включенный генератор не напрягает. Из бонусов хочется отметить индикатор перегрузки, так что всегд…
Валерий Семенов
Оценка/рейтинг:
2017-03-24
Достоинства
Хорошо заводится
Недостатки
Расход больше раза в полтора, мощность меньше
Общее впечатление
Кароч, Champion таки оказался чемпионом. По расходу топлива и по недовыдаванию мощности. Никаких 2,3, тем более 2,5 там нет. Электропилу цепную запустить не могу. Водяной насос, комп, посудомойка 4 лампочки и не тянет совершенно. А топлива жрет даже на одном холодильнике, компьютере и лампочке под 2 литра. Мне такая роскошь не по карману.
Сергей Некрасов
Оценка/рейтинг:
2016-08-18
Достоинства
Работает! Мощность соответствует. Всегда заводится.
Недостатки
Шумный шо пипец. Нужно ставить в шумоизоляционную будку и на резину. Доп. глушитель не помешает. Повышенный расход. Отпахал 3 месяца. При средней нагрузке уплетает 2 литра 92го, хотя по паспорту заявлено 1.2 при максимальной.
Общее впечатление
За свои деньги хорош. Напряжение стабильное, заводится с 1 раза, соответствует характеристикам, кроме расхода.
Champion 201003 Двухтопливный инверторный генератор мощностью 5500 Вт: отзывы пользователей и предложения
Champion 201003 — компактный двухтопливный инверторный генератор с номинальной мощностью 4000 Вт и начальной мощностью 5500 Вт.
8.65 Обзоры пользователейНаписать отзыв
СравнитьИзбранноеИз списка исключенных 462
Bass Pro Shops
1099,99 $
Подробности см. на сайте basspro.com (откроется в новой вкладке)
Cabela’s
$1,099,99
Подробнее см. на веб-сайте cabelas.com (открывается в новой вкладке)
Amazon
Блок поиска на amazon.com (открывается в новой вкладке)
2 Описание страницы
1
Масштаб Спецификации
Видео о продукции
Сравнение с другими генераторами
Сравнение цен
Итоги
Полные характеристики
О Champion
Информация о гарантии
0035
Вопросы и ответы
Отзывы пользователей
Описание
Зум на чемпионе 2016003
В замешивании Чемпион 201003 является компактным портативным генератором, в основном готовым к:
RV. и кочевой образ жизни
Люди, время от времени участвующие в спортивных соревнованиях, спектаклях под открытым небом и фестивалях под открытым небом
Домовладельцы, которые хотят иметь возможность пользоваться самыми необходимыми устройствами в своем доме даже во время отключения электричества
Любители кемпинга и путешествий, ищущие портативный источник питания
В следующих разделах будут обсуждаться характеристики питания, наличие различных розеток, портативность и любые дополнительные функции устройства, включая информацию о соответствии его нормам излучения.
Мощность и время работы
The Champion 201003
Благодаря двухтопливной технологии Champion 201003 обеспечивает питание 120 В, мощность и универсальность. Когда он работает на бензине, он выигрывает от рабочая мощность 4000 Вт и пиковая мощность 5500 Вт . При питании от пропана он имеет номинальную мощность 3600 Вт и пиковую мощность 5500 Вт. Более того, поскольку он поддерживает параллельную работу с (ParaLink (открывается в новой вкладке) не включен), его мощность может быть увеличена при подключении ко второму совместимому устройству.
Инверторный генератор оснащен обычным пусковым механизмом, а также простым и элегантным электростартером (с аккумулятором) . Он рассчитан на уровень шума 61 дБА (чуть более шумный, чем при обычном разговоре). Чемпион EZ Start Dial позволяет интуитивно запускать двигатель с легким доступом ко всем необходимым элементам управления.
Что касается времени работы, то модель 201003, наряду с запасом топлива в 3,7 галлона, может работать в течение до 20 часов с полным баком, заправленным бензином (расход топлива около 0,19 галлона в час). Если используется пропан, он может работать до 15 часов (на 20-фунтовом баллоне — расход пропана около 0,31 галлона в час). Благодаря светодиодному индикатору Fuel Fill Assist LED , оригинальному светодиоду, расположенному рядом с крышкой топливного бака, заполнение бака устройства значительно облегчается в условиях плохого освещения. Светодиод может освещать зону заправки бензином, просто нажав кнопку.
Поскольку 201003 производит чистую синусоидальную волну с полным гармоническим искажением <3%, чувствительную электронику можно безопасно подключать к розеткам переменного тока.
Розетки
Панель управления включает в себя следующие 3 розетки переменного тока :
Дуплекс 120 В 20 А (5-20R)
120 В 30 А (TT-30R) розетка 90 Спортивная розетка 1 DC 1 8 10902 : есть Розетка 12 В 8 А (в стиле прикуривателя), позволяющая легко заряжать аккумуляторы. Поскольку к устройству прилагается двухпортовый USB-адаптер, вы также сможете использовать розетку постоянного тока для удобной зарядки электроники, такой как мобильные телефоны и планшеты.
Этот генератор Champion имеет номер RV Ready , так как он оснащен розеткой TT-30R (TT означает «Travel Trailer»).
Портативность
Поскольку Champion 201003 представляет собой инверторный генератор, его конструкция в закрытом корпусе (Д 24,6 x Ш 19 x В 30,9 дюйма) предлагает больше эстетики, чем обычный продукт с открытой рамой. Этот тип конструкции является наиболее современным и удобным способом получения энергии в рекреационном режиме.
Поскольку вес генератора составляет 118 фунтов, его ручное перемещение или транспортировка могут быть затруднительны, несмотря на то, что технически он считается «портативным» (подвижным). Тем не менее, его все еще можно довольно удобно перемещать с помощью комплекта из 2 колес (⌀5,5 дюйма) и телескопической рукоятки, когда он стоит на земле.
Особенности
Панель управления модели 201003
Одной из многих функций модели 201003 является центр обработки данных Intelligauge, встроенный в панель управления, который удобно предоставляет информацию о напряжении, выходной мощности и часах работы, что помогает контролировать активность и статус. Чтобы предложить вам еще больше контроля и простоту работы в ночное время, панель оснащена светодиодной подсветкой .
В дополнение к этой информации световые индикаторы устройства будут отображать, если генератор перегружен, генератор готов и уровень масла слишком низкий.
С точки зрения безопасности, этот продукт имеет автоматическое отключение при низком уровне масла и защиту от перегрузки (автоматический выключатель), что обеспечивает полное спокойствие при его использовании.
Помимо классической документации и руководства пользователя (откроется в новой вкладке), которые помогут вам быстро приступить к работе, Champion 201003 также поставляется с некоторыми аксессуарами: пропановым шлангом, маслом, двухпортовым USB-адаптером и воронкой. Официальный чехол для хранения и беговой чехол также можно приобрести отдельно.
Выбросы
Champion 201003 — это одобренный EPA , но НЕ CARB-совместимый. Таким образом, его нельзя купить или продать в Калифорнии.
Однако он оснащен искрогасителем , что делает его пригодным для использования в лесных районах.
Видеоматериалы о продуктах
Champion 201003 по сравнению с другими генераторами
Следующие диаграммы дают вам представление о том, как некоторые ключевые характеристики Champion 201003 сравниваются с инверторными генераторами аналогичной мощности (от 3500 до 4500 Вт). ).
Обладая сухим весом 118 фунтов, Champion 201003 относится к ожидаемому весу для инверторных генераторов мощностью от 3500 до 4500 Вт. Если вес является вашим главным приоритетом, одним из чемпионов в этой категории мощности является WEN GN400i, вес которого составляет всего 66,1 фунта.
Уровень шума этого инверторного генератора несколько усреднен для его типа и диапазона мощности и составляет 61 дБА. Для тех, кто ищет менее шумное устройство, мы предлагаем Westinghouse iGen4500DF. Уровень шума всего 52 дБА делает его одним из самых тихих устройств в этом диапазоне мощностей.
Модель 201003 обеспечивает большее время работы по сравнению с инверторами аналогичной мощности, достигая 20 часов при нагрузке 25%. Что касается автономности, одним из продуктов с сопоставимой выходной мощностью, который предлагает самое высокое время работы, является Firman W03661OF, который может похвастаться временем работы до 25 часов.
Автономность имеет большое значение, однако она во многом зависит от запаса топлива генератора, поэтому бессмысленно обсуждать ее без упоминания топливной экономичности. Поскольку этот инверторный генератор использует примерно 0,19GPH (галлон в час) при нагрузке 25% находится в диапазоне среднего расхода бензина аналогичных продуктов. Если вы хотите еще больше повысить эффективность использования топлива, генератор Champion 200988, который может похвастаться расходом газа всего 0,16 галлона в час, может стать для вас подходящим генератором.
Сравнение цен
Как видно из этой интерактивной диаграммы, по сравнению с другими двухтопливными инверторными генераторами мощностью 3500–4500 Вт Champion 201003 находится в средней части ценового диапазона.
Таким образом, этот генератор прекрасно вписывается в бюджет, ожидаемый для такого продукта.
Итог
СИЛЬНЫЕ СТОРОНЫ:
В ожидаемом ценовом диапазоне
Панель управления с подсветкой
Несколько аксессуаров в комплекте
RV Ready
Электрический запуск
2 035
Светодиодный индикатор помощи при заправке топливом
Двойной топливный бак
Инвертор
Высокая продолжительность работы
СРЕДНИЕ ХАРАКТЕРИСТИКИ:
Приличный вес (118 фунтов)
Приемлемый уровень шума (61 дБА)
Достойная топливная экономичность
СЛАБЫЕ СТОРОНЫ:
Нет дистанционного запуска
CARB 30 0049
0002 Вы владеете Чемпионом 201003 и согласны (или не согласны) с этими сильными и слабыми сторонами?
Дайте нам знать и напишите свой отзыв.
Особенности и характеристики
Общие сведения
Инвертор
Да
Возможность параллельного подключения
Да, кабель не входит в комплект
Готовность к автодому
Да
)
Двигатель
224 куб.см OHV 4 -ход
Система запуска
Отдача, электрическая
Гарантия
3 года
Мощность
Бензин
Пропан
4 с 4906 Работа ,000 Вт
3600 Вт
Пусковая мощность
5500 Вт
5500 Вт
Рабочий ток
33,3 А
30 А
Пиковый ток
45,8 А
45,8 А 5 раз
9024 50% нагрузка
Неизвестно
Неизвестно
Время работы при нагрузке 25 %
20 ч
15 ч
Характеристики 4
Розетки GFCI
Нет
Закрытые розетки
Да
Автоматическая регулировка напряжения
Инвертор
Розетки переменного тока
1x Дуплекс 120 В 20 А (5-20R)
1×30320
)
Розетки постоянного тока
1x 12 В 8 А (стиль прикуривателя)
Центр обработки данных
Выходная мощность, время работы в часах и напряжение
4 Индикаторы
Низкий уровень масла, перегрузка и готовность к выходу
Топливный бак
3,7 галлона
Указатель уровня топлива
№
Разное
47
118 фунтов
Прибл. размеры (Д x Ш x В)
24,6 x 19 x 20,9 дюйма
Шум (нижний предел)
61 дБА
THD
7 905
2 < 4 3 5
Соответствие
Агентство по охране окружающей среды
Безопасность
Защита от низкого уровня масла и перегрузки
Искрогаситель
Да
Нейтральный
Плавающий
Аксессуары в комплекте
5
Масло, воронка, пропановый шланг, USB-адаптер с двумя портами и батарея
Страна-изготовитель
Китай
UPC
817198024559 292549 900 0002 В отличие от многих веб-сайтов, мы сделали все возможное, чтобы изучить каждый из спецификаций выше. При этом мы не застрахованы от случайных ошибок или упущений. Если вы заметили какие-либо отсутствующие или неправильные значения, не стесняйтесь предлагать улучшения, чтобы мы могли решить проблему.
О компании Champion Power Equipment
Компания Champion Power Equipment, основанная в 2003 году, является производителем силового оборудования в США. Относительно небольшая компания зарекомендовала себя как в сфере производства портативных генераторов, так и в секторе энергетического оборудования в целом, уделяя особое внимание оборудованию для тяжелых условий эксплуатации, такому как лесорубы, снегоуборщики, измельчители и т. д. Все их продуктов разработаны в США . Однако компания не предоставляет информацию о происхождении их компонентов.
Информация о гарантии
Гарантия на Champion 201003 составляет до 3 лет. Эта гарантия может быть ограниченной и не распространяться на все детали генератора. Для получения дополнительной информации о гарантии на генераторы Champion см. гарантийную политику Champion (откроется в новой вкладке). Кроме того, вы также можете связаться с их службой поддержки: 1-877-338-0999.
Вопросы и ответы
Чем он питает?
Примеры элементов, которые могут быть одновременно с питанием . Приведенные ниже примеры основаны на максимальной нагрузке 80 % и расчетной мощности. Для более точной оценки используйте наш калькулятор размеров генератора.
Артикул
Рабочая мощность
Начальная мощность
Дома
Микроволновая печь (1000 1000 4 Вт) 0249
1500
Переменный ток (10 000 БТЕ)
1500
2200
Холодильник (energy star)
192
1192
Всего
3192 Вт
4192 Вт
93 Для кемпинг
Дом на колесах переменного тока (11 000 БТЕ)
1010
1600
Холодильник для автодома
180
600
Фен
1800
1900
909034 Миксер
200
Всего
3190 Вт
3780 Вт
Для работы
Настольная пила
1800
9059 20549 240 45
Сабельная пила
730
960
Очиститель канализации
250
250
Итого
2780 Вт
5480 Вт
Можно ли добавить комплект беспроводного дистанционного управления (вопрос 90 12 мая, 90 2)0002 К сожалению, для данного аппарата нет официальных комплектов дистанционного запуска.
В описании указано, что датчик уровня топлива есть, в обзоре нет. Что правильно? (вопрос задан 30 мая 2021 г.)
Это должно быть недоразумение, поскольку в описании не упоминается указатель уровня топлива.
Имеется ли в этом генераторе устройство для отключения подачи топлива, чтобы карбюратор оставался сухим, когда он не используется? (запрос от 14 июля 2021 г.)
Стартовую ручку EZ можно повернуть в положение «бензиновый клапан ВЫКЛ», чтобы генератор работал до тех пор, пока в карбюраторе не останется топлива.
Имеются ли порты USB (вопрос задан 29 сентября 2022 г.)
Устройство не имеет портов USB. Тем не менее, он поставляется с USB-адаптером, который можно подключить к автомобильной розетке постоянного тока на 12 В.
Не нашли правильный ответ? Задайте свой вопрос.
Чемпион 201003
8.6 Общий балл
5 отзывов
Добавить отзыв
Цена
8. 6
Качество
3
3 9 3
8.8
Performance
7.8
Очки Gucci GG3000 QZB Blue
210 канадских долларов
230 канадских долларов
Ой!
Похоже, что этот продукт больше не доступен, так как он снят с производства.
Подпишитесь на нашу рассылку и получите 5% скидку, чтобы поднять себе настроение:
Пожалуйста, укажите действующий адрес электронной почты
Программирование обработки на современных станках с ЧПУ осуществляется на языке, который обычно называют языком ИСО (ISO) 7 бит, или языком G- и М-кодов. Коды с адресом G, называемые подготовительными, определяют настройку СЧПУ на определенный вид работы. Коды с адресом М называются вспомогательными и предназначены для управления режимами работы станка.
Базовые коды программирования обработки
Код (функция)
Назначение и пример кадра с кодом
Осевое перемещение
G00
Ускоренный ход – перемещение на очень высокой скорости в указанную точку
G00 X10. Y20. Z25.
G01
Линейная интерполяция – перемещение по прямой линии на указанной скорости подачи
G01 X10. Y20. F100
G02
Круговая интерполяция – перемещение по дуге по часовой стрелке на указанной скорости подачи
G02 X10. Y20. R10. F100
G03
Круговая интерполяция – перемещение по дуге против часовой стрелки на указанной скорости подачи
G03 X10. Y20. R10. F100
Настройка
G20
Ввод дюймовых данных
G20 G00 X10. Y20
G21
Ввод метрических данных
G21 G00 X10. Y20
G90
Абсолютное позиционирование – все координаты отсчитываются от постоянной нулевой точки
G90 G00 X10. Y20
G91
Относительное позиционирование – все координаты отсчитываются от предыдущей позиции
G91 G00 X10. Y20
Обработка отверстий
G81
Цикл сверления
G81 X10. Y20. Z-5. F30
G82
Цикл сверления с задержкой на дне отверстия
G82 X10. Y20. Z-5. R1. P2. F30
G83
Прерывистый цикл сверления
G83 X10. Y20. Z-5. Q0.25 R1. F30
G85
Цикл растачивания отверстия
G85 X10. Y20. Z-5. F30
Вспомогательные коды (функции)
M00
Запрограммированный останов – выполнение программы временно прекращается
M01
Запрограммированный останов по выбору – выполнение программы временно прекращается, если активирован режим останова по выбору
М03
Прямое вращение шпинделя – шпиндель вращается по часовой стрелке
М04
Обратное вращение шпинделя – шпиндель вращается против часовой стрелки
М05
Останов шпинделя
М06
Автоматическая смена инструмента
М06 Т02
M08
Включение подачи охлаждающей жидкости
M09
Выключение подачи охлаждающей жидкости
M30
Конец программы, перевод курсора к началу программы
Вперед >>
G и M коды для программирования обработки на станках с ЧПУ
Программирование обработки на станках с ЧПУ осуществляется на языке, который обычно называют языком G и M кодов. Существует три метода программирования обработки для станков с ЧПУ:
Ручное программирование.
Все операторы станков с ЧПУ, технологи-программисты должны иметь хорошее представление о технике ручного программирования. Это как начальные классы в школе, обучение в которых дает базу для последующего образования.
Программирование на пульте УЧПУ.
Когда программы создаются и вводятся прямо на стойке ЧПУ, используя клавиатуру и дисплей. Например, оператор станка может произвести верификацию УП или выбрать требуемый постоянный цикл при помощи специальных пиктограмм и вставить его в код управляющей программы.
Программирование при помощи CAD/CAM системы.
Программирование при помощи CAD/САМ системы позволяет «поднять» процесс написания программ обработки на более высокий уровень. Работая с CAD/CAM системой, технолог-программист избавляет себя от трудоемких математических расчетов и получает инструменты, значительно повышающие скорость написания управляющих программ.
Cовокупность команд на языке программирования, соответствующая алгоритму функционирования станка по обработке конкретной заготовки называется управляющая программа (УП).
Управляющая программа состоит из последовательности кадров и обычно начинается с символа начало программы (%) и заканчивается М02 или М30.
Каждый кадр программы представляет собой один шаг обработки и (в зависимости от УЧПУ) может начинаться с номера кадра (N1…N10 и т.д.), а заканчиваться символом конец кадра (;).
Кадр управляющей программы состоит из операторов в форме слов (G91, M30, X10. и т.д.). Слово состоит из символа (адреса) и цифры, представляющее арифметическое значение.
Адреса X, Y, Z, U, V, W, P, Q, R, A, B, C, D, E являются размерными перемещениям, используют для обозначения координатных осей, вдоль которых осуществляются перемещения.
Слова, описывающие перемещения, могут иметь знак (+) или (-). При отсутствии знака перемещение считается положительным.
Адреса I, J, K означают параметры интерполяции.
G — подготовительная функция.
M — вспомогательная функция.
S — функция главного движения.
F — функция подачи.
T, D, H — функции инструмента.
Символы могут принимать другие значения в зависимости от конкретного УЧПУ.
G коды для ЧПУ
G00 — быстрое позиционирование.
Функция G00 используется для выполнения ускоренного перемещения режущего инструмента к позиции обработки или к безопасной позиции. Ускоренное перемещение никогда не используется для выполнения обработки, так как скорость движения исполнительного органа станка очень высока. Код G00 отменяется кодами: G01, G02, G03.
G01 — линейная интерполяция.
Функция G01 используется для выполнения прямолинейных перемещений с заданной скоростью (F). При программировании задаются координаты конечной точки в абсолютных значениях (G90) или приращениях (G91) с соответственными адресами перемещений (например X, Y, Z). Код G01 отменяется кодами: G00, G02, G03.
G02 — круговая интерполяция по часовой стрелке.
Функция G02 предназначена для выполнения перемещения инструмента по дуге (окружности) в направлении часовой стрелки с заданной скоростью (F). При программировании задаются координаты конечной точки в абсолютных значениях (G90) или приращениях (G91) с соответственными адресами перемещений (например X, Y, Z).
Параметры интерполяции I, J, K, которые определяют координаты центра дуги окружности в выбранной плоскости, программируются в приращениях от начальной точки к центру окружности, в направлениях, параллельных осям X, Y, Z соответственно.
Код G02 отменяется кодами: G00, G01, G03.
G03 — круговая интерполяция против часовой стрелки.
Функция G03 предназначена для выполнения перемещения инструмента по дуге (окружности) в направлении против часовой стрелки с заданной скоростью (F). При программировании задаются координаты конечной точки в абсолютных значениях (G90) или приращениях (G91) с соответственными адресами перемещений (например X, Y, Z).
Параметры интерполяции I, J, K, которые определяют координаты центра дуги окружности в выбранной плоскости, программируются в приращениях от начальной точки к центру окружности, в направлениях, параллельных осям X, Y, Z соответственно.
Код G03 отменяется кодами: G00, G01, G02.
G04 — пауза.
Функция G04 — команда на выполнение выдержки с заданным временем. Этот код программируется вместе с X или Р адресом, который указывает длительность времени выдержки. Обычно, это время составляет от 0.001 до 99999.999 секунд. Например G04 X2.5 — пауза 2.5 секунды, G04 Р1000 — пауза 1 секунда.
G17 — выбор плоскости XY.
Код G17 предназначен для выбора плоскости XY в качестве рабочей. Плоскость XY становится определяющей при использовании круговой интерполяции, вращении системы координат и постоянных циклов сверления.
G18 — выбор плоскости XZ.
Код G18 предназначен для выбора плоскости XZ в качестве рабочей. Плоскость XZ становится определяющей при использовании круговой интерполяции, вращении системы координат и постоянных циклов сверления.
G19 — выбор плоскости YZ.
Код G19 предназначен для выбора плоскости YZ в качестве рабочей. Плоскость YZ становится определяющей при использовании круговой интерполяции, вращении системы координат и постоянных циклов сверления.
G40 — отмена коррекции на радиус инструмента.
Функция G40 отменяет действие автоматической коррекции на радиус инструмента G41 и G42.
G41 — левая коррекция на радиус инструмента.
Функция G41 применяется для включения автоматической коррекции на радиус инструмента находящегося слева от обрабатываемой поверхности (если смотреть от инструмента в направлении его движения относительно заготовки). Программируется вместе с функцией инструмента (D).
G42 — правая коррекция на радиус инструмента.
Функция G42 применяется для включения автоматической коррекции на радиус инструмента находящегося справа от обрабатываемой поверхности (если смотреть от инструмента в направлении его движения относительно заготовки). Программируется вместе с функцией инструмента (D).
G43 — коррекция на положение инструмента.
Функция G43 применяется для компенсации длинны инструмента. Программируется вместе с функцией инструмента (H).
G54 — G59 — заданное смещение.
Смещение рабочей системы координат детали относительно системы координат станка.
G70 — ввод дюймовых данных.
Функция G70 активизирует режим работы с дюймовыми данными.
G71 — ввод метрических данных.
Функция G71 активизирует режим работы с метрическими данными.
G80 — отмена постоянного цикла.
Функция, которая отменяет любой постоянный цикл.
G81 — стандартный цикл сверления.
Цикл G81 предназначен для зацентровки и сверления отверстий. Движение в процессе обработки происходит на рабочей подаче. Движение в исходное положение после обработки идет на ускоренной подаче.
G82 — сверление с выдержкой.
Цикл G82 предназначен для сверления и зенкования отверстий. Движение в процессе обработки происходит на рабочей подаче с паузой в конце. Движение в исходное положение после обработки идет на ускоренной подаче.
G83 — цикл прерывистого сверления.
Цикл G83 предназначен для глубокого сверления отверстий. Движение в процессе обработки происходит на рабочей подаче с периодическим выводом инструмента в плоскость отвода. Движение в исходное положение после обработки идет на ускоренной подаче.
G84 — цикл нарезания резьбы.
Цикл G84 предназначен для нарезания резьбы метчиком. Движение в процессе обработки происходит на рабочей подаче, шпиндель вращается в заданном направлении. Движение в исходное положение после обработки идет на рабочей подаче с обратным вращением шпинделя.
G85 — стандартный цикл растачивания.
Цикл G85 предназначен для развертывания и растачивания отверстий. Движение в процессе обработки происходит на рабочей подаче. Движение в исходное положение после обработки идет на рабочей подаче.
G86 — цикл растачивания с остановкой вращения шпинделя.
Цикл G86 предназначен для растачивания отверстий. Движение в процессе обработки происходит на рабочей подаче. В конце обработки происходит остановка шпинделя. Движение в исходное положение после обработки идет на ускоренной подаче.
G87 — цикл растачивания с отводом вручную.
Цикл G87 предназначен для растачивания отверстий. Движение в процессе обработки происходит на рабочей подаче. В конце обработки происходит остановка шпинделя. Движение в исходное положение после обработки идет вручную.
G90 — режим абсолютного позиционирования.
В режиме абсолютного позиционирования G90 перемещения исполнительных органов производятся относительно нулевой точки рабочей системы координат G54-G59 (программируется, куда должен двигаться инструмент). Код G90 отменяется при помощи кода относительного позиционирования G91.
G91 — режим относительного позиционирования.
В режиме относительного (инкрементального) позиционирования G91 за нулевое положение каждый раз принимается положение исполнительного органа, которое он занимал перед началом перемещения к следующей опорной точке (программируется, на сколько должен переместиться инструмент). Код G91 отменяется при помощи кода абсолютного позиционирования G90.
G94 — скорость подачи в дюймах/миллиметрах в минуту.
При помощи функции G94 указанная скорость подачи устанавливается в дюймах или в миллиметрах за 1 минуту. Программируется вместе с функцией подачи (F). Код G94 отменяется кодом G95.
G95 — скорость подачи в дюймах/миллиметрах на оборот.
При помощи функции G95 указанная скорость подачи устанавливается в дюймах или в миллиметрах на 1 оборот шпинделя. Т.е. скорость подачи F синхронизируется со скоростью вращения шпинделя S. Код G95 отменяется кодом G94.
M коды для ЧПУ
М00 — программируемый останов.
Когда СЧПУ исполняет команду М00, то происходит останов. Все осевые перемещения останавливаются, при этом шпиндель (у большинства станков) продолжает вращаться. Работа по программе возобновляется со следующего кадра после нажатия кнопки «Старт».
М01 — останов с подтверждением.
Код М01 действует аналогично М00, но выполняется только после подтверждения с пульта управления станка. Если клавиша подтверждения нажата, то при чтении кадра с М01 происходит останов. Если же клавиша не нажата, то кадр М01 пропускается и выполнение УП не прерывается.
М02 — завершение программы.
Код М02 указывает на завершение программы и приводит к останову шпинделя, подачи и выключению охлаждения.
М0З — вращение шпинделя по часовой стрелке.
При помощи кода М0З включается прямое вращение шпинделя с запрограммированным числом оборотов (S). Код М0З действует до тех пор, пока он не будет отменен с помощью М04 или М05.
М04 — вращение шпинделя против часовой стрелки.
При помощи кода М04 включается обратное вращение шпинделя с запрограммированным числом оборотов (S). Код М04 действует до тех пор, пока он не будет отменен с помощью М03 или М05.
М05 — останов шпинделя.
Код М05 останавливает вращение шпинделя, но не останавливает осевые перемещения.
М06 — смена инструмента.
При помощи кода М06 инструмент, закрепленный в шпинделе, меняется на инструмент, находящийся в положении готовности в магазине инструментов.
М07 — включение охлаждения №2.
Код М07 включает подачу СОЖ в зону обработки в распыленном виде, если станок обладает такой возможностью.
М08 — включение охлаждения №1.
Код М08 включает подачу СОЖ в зону обработки в виде струи.
М09 — отключение охлаждения.
Код М09 выключает подачу СОЖ и отменяет команды М07 и М08.
М10 — зажим.
Код М10 относиться к работе с зажимным приспособлением подвижных органов станка.
М11 — разжим.
Код М11 относиться к работе с зажимным приспособлением подвижных органов станка.
МЗ0 — конец информации.
Код МЗ0 информирует СЧПУ о завершении программы, приводит к останову шпинделя, подачи и выключению охлаждения.
Дополнительные функции и символы при программировании станков с ЧПУ
X, Y, Z — команды осевого перемещения.
А, В, С — команды кругового перемещения вокруг осей X, Y, Z соответственно.
I, J, К — параметры круговой интерполяции параллельные осям X, Y, Z соответственно.
R
При круговой интерполяции G02 или G03, R определяет радиус, который соединяет начальную и конечную точки дуги. В постоянных циклах R определяет положение плоскости отвода. При работе с командой вращения R определяет угол поворота координатной системы.
D — значение коррекции на радиус инструмента.
Н — значение компенсации длины инструмента.
F — функция подачи.
S — функция главного движения.
Т — значение определяющее номер инструмента, который необходимо переместить в позицию смены, путем поворота инструментального магазина.
N — нумерация кадров УП.
/ — пропуск кадра.
(…) — комментарии в УП.
Основы G-кода: формат и структура программы
Учебное пособие по G-коду CNCCookbook
Блоки = строки G-кода
Строка g-кода обычно называется «блоком». До сих пор мы печатали по одному блоку за раз, а не пытались создать полную программу G-кода. Таким образом можно многое сделать. Как я уже говорил, это все равно, что иметь действительно хороший ручной станок с DRO и Power Feeds на всех осях. Но если мы немного углубимся в язык g-кода, нас ждет гораздо больше возможностей.
Итак, первое, что вам нужно знать, это как создавать блоки, так как они являются базовой единицей программы обработки деталей в G-коде.
Начало блока
Блок может содержать ряд необязательных частей. Определенные части блока должны стоять первыми, если они должны присутствовать в блоке. В частности, он может дополнительно начинаться с порядкового номера, пропуска блока, номера программы или символа начала/конца ленты («%»). Давайте посмотрим на функцию каждой из этих начальных частей и помните, что блок не обязательно должен иметь ни одну из них.
Начало/Конец ленты
Процент «%» используется для обозначения начала и конца программы. Поместите одну в качестве первой строки (блока) и одну в качестве последней строки (блока) любой программы G-кода. Не все контроллеры требуют этого. Большинство проигнорирует все, что следует после «%», поэтому вы можете оставлять там комментарии. Такие комментарии попадают в раздел «Лидер». Все эти отсылки к «Лидерам» и «Ленте» могут показаться странными относительно новичкам в ЧПУ. Они имеют историческое происхождение, восходящее к тому времени, когда программы NC хранились на перфоленте. До сих пор есть машины, которые с удовольствием производят детали, которые работали таким образом, но к настоящему времени их контроллеры часто обновлялись или, по крайней мере, устройство чтения ленты было заменено интерфейсом последовательного порта или USB-ключа.
Номера программ
Программы и подпрограммы нуждаются в номере для ссылки, и это обеспечивается номером программы. Номер программы — это слово «О» (в G-коде мы называем буквы «словами», потому что каждое из них — это «слово», указывающее контроллеру что-то делать). Для вашего контроллера может потребоваться или не потребоваться номер программы, но рекомендуется его предоставить. Программа с правильным началом/концом ленты и номерами программ будет выглядеть так:
% Простая программа G-кода, ничего не делающая
O1000
%
Ничего особенного, а? Мы будем продолжать украшать эту маленькую программу, добавляя различные конструкции.
Пропуск блока (также называемый удалением блока)
Пропуск блока — это удобный способ временно исключить блоки из программы, не удаляя их. Просто начните строку с косой черты (‘/’), и контроллер может игнорировать строку. Эти пропуски блоков могут быть дополнительно пронумерованы на некоторых контроллерах, и потенциально каждым номером можно управлять с панели управления оператора. Для многих контроллеров Fanuc до 9могут использоваться разные номера пропусков блоков. Вот строка с ускоренным ходом (G00), отключенным через пропуск блока:
/G00 X0 Y0 Z0
А вот та же строка, отключенная через пропуск блока 1 и 3:
/1/3G00 X0 Y0 Z0
Эти пропуски блоков предназначены для того, чтобы оператор мог вносить быстрые изменения или иметь необязательные разделы кода, которые можно включать и выключать с панели управления. В G-Wizard Editor функция BLK DEL на панели инструментов используется для включения или выключения пропуска блоков.
Вероятно, вы не будете их часто использовать, пока не продвинетесь довольно далеко в своей работе с g-кодом, так что пока просто знайте, что они доступны.
Порядковые номера / номера строк
Самое лучшее мы оставили напоследок: порядковые номера. Порядковый номер обеспечивает уникальный способ идентификации конкретного блока. Вам не нужно упорядочивать все блоки, но это обычно делается. Если бы наша простая ничего не делающая программа внезапно содержала строку, которая что-то делала, и имела бы порядковый номер, это могло бы выглядеть так:
% Сделайте что-нибудь простое, программа g-code
O1000
N100 G00 X0 Y0 Z0
%
Порядковые числа никогда не будут иметь десятичной точки или отрицательного знака — они всегда положительные целые числа. Перенумерация программы для сохранения согласованности порядковых номеров может быть настоящей проблемой, поэтому полагайтесь на редактор G-кода для выполнения этой работы. Вот панель пересмотра нумерации последовательностей из редактора G-Wizard:
Команда изменения последовательности G-кода из GWE…
По параметрам вы можете определить некоторые вещи, которые вам нужно иметь в виду, например, мы не записываем номера программ или строки начала/конца на магнитной ленте. Если у строки есть порядковый номер, перед ним может стоять только символ пропуска блока. В противном случае порядковый номер должен быть первым в строке.
Пробелы в программах G-кода
Самое время упомянуть, что во многих случаях g-код игнорирует пробелы. Они нужны просто для того, чтобы сделать код более читабельным для нас, людей, так что используйте их себе во благо. Вы можете вставлять пробелы между словом и числом, которое идет со словом (это число называется «адресом», см. Формат адреса слова ниже):
G00 может быть G 00
X0 может быть X 0
Решите, что вы хотите видеть с точки зрения удобочитаемости, и придерживайтесь этого. В зависимости от вашего редактора G-кода в нем могут быть инструменты, которые помогут вам автоматически управлять такого рода форматированием. G-Wizard CNC Simulator and Editor, безусловно, делает это.
Пропуск дополнительной информации G-кода для экономии памяти
Как уже упоминалось, пробелы необязательны, порядковые номера являются необязательными, если только они не используются для подпрограмм или макросов (подробнее об этом позже), и потенциально есть другие вещи в язык g-кода, которые являются необязательными. Стоит иметь в виду, что если вы используете старый контроллер, одной из постоянных проблем является объем памяти контроллера. Удаление пробелов и неиспользуемых порядковых номеров может освободить довольно много байтов, уменьшив ваши программы G-кода. Не упускайте возможность сделать что-то подобное, если это необходимо для выполнения работы.
Word Формат адреса
Как уже упоминалось, буква в программе g-кода называется словом . С каждым словом связан адрес , который является числом, которое идет со словом. Например, когда мы говорим о координатах, адрес — это значение координаты для оси: «X0» — это X-слово с адресом «0».
В зависимости от функции Word адрес должен принимать определенный формат. Например, мы упомянули, что адреса (порядковые номера), связанные с «N» словами, должны быть целыми положительными числами, без десятичных точек или знаков.
Даже слово «G», от которого происходит название «G-код», имеет адрес, определяющий, о каком G-коде идет речь — «G00» — это слово G с адресом «00», которое инициирует режимы быстрого движения.
Хороший симулятор ЧПУ будет иметь возможность определять форматы адресов слов в соответствии с ожиданиями вашего контроллера (они могут довольно сильно различаться от одного диалекта g-кода к другому). G-Wizard Editor использует следующий экран для определения форматов адресов Word:
Настройка формата адреса слова для слова «М»…
Чтобы использовать его, выберите букву для слова в раскрывающемся меню вверху слева. Параметры конфигурации находятся в левой колонке. Образцы представлены справа, чтобы показать, что действительно, а что нет.
Блоки не обязательно выполняются слева направо
Одной из вещей, с которой я столкнулся при первом изучении g-кода, была идея о том, что блоки while в основном выполняются сверху вниз, если только вы явно не скажете им делать что-то другое через макросы и подпрограммы. , блоки не обязательно выполняются слева направо. На самом деле, каждый контроллер может определять свой собственный особый порядок, хотя они и стараются быть похожими. Вот, например, порядок выполнения для RS-274 G-Code:
1. Комментарий 1.1 Сообщение комментария 2. Установите режим скорости подачи (G93, G94, G95). 3. Установите скорость подачи (F). 4. Установите скорость шпинделя (S). 5. Выберите инструмент (T). 6. Замените инструмент (M6). 7. Включение или выключение шпинделя (M3, M4, M5). 8. Подача охлаждающей жидкости вкл. или выкл. (M7, M8, M9). 9. Включите или отключите переопределение (M48, M49). 10. Упор (G4). 11. Установите активную плоскость (G17, G18, G19). 12. Установите единицы измерения длины (G20, G21). 13. Включение или выключение компенсации радиуса фрезы (G40, G41, G42) 14. Включение или выключение компенсации длины резца (G43, G44, G49) 14.5 Выполните масштабирование G50/G51. 15. Выбор системы координат (G54, G55, G56, G57, G58, G59, G59.1, G59.2, G59.3). 16. Установить режим управления траекторией (G61, G61.1, G64) 17. Установить режим расстояния (G90, G91). 18. Установите режим отвода (G98, G99). 18.6 Вращение координат G68/69. Масштабирование перед вращением. 18.7 Сделать полярные координаты G15/16. 19. Перейдите к исходному местоположению (G28, G30) или измените данные системы координат (G10) или установите смещения осей (G92, G92.1, G92.2, G94).
20. Выполнить движение (от G0 до G3, G33, G34, G38.x, G73, G76, G80 до G89), измененное (возможно) с помощью G53.
Как видите, порядок по всей карте. Это было сделано для того, чтобы операции, зависящие друг от друга, выполнялись в предпочтительном порядке. Например, если вы включаете или отключаете СОЖ на той же линии, где вы потенциально собираетесь выполнять движение резки, вам нужно, чтобы СОЖ включался до начала резки, а не после него.
Режимы
Как мы упоминали в некоторых других статьях, G-Code — это модальный язык. Много раз, когда мы выполняем конкретное слово, оно устанавливает режим, который переносится вперед. После того, как мы выполнили «G00», мы перевели контроллер в режим Rapids. Любые координатные слова приведут к ускоренному движению к координате. Эти режимы — еще одна причина, чтобы знать порядок выполнения слов в блоке, так как многие слова создают режимы, которые влияют на другие слова, следующие за ними.
Принудительное выполнение порядка выполнения
Если у вас есть какие-либо сомнения относительно порядка, в котором происходят события, или, что более важно, если вам важно, в каком порядке выполняются слова, лучший ответ — поместить их в последовательные блоки. Таким образом, нет никакой двусмысленности. Вы можете попытаться запомнить произвольный порядок для вашего контроллера, но это гораздо более подвержено ошибкам!
Не впихивайте слишком много в блок!
Следствием идеи принудительного порядка выполнения является не попытка втиснуть слишком много в блок. G-код часто все равно не позволит вам — вы не можете, например, просто влепить целую кучу ходов в один и тот же блок. Так что не стоит слишком торопиться. Держите вместе то, что имеет смысл, и пусть то, что не имеет смысла, распределяется по отдельным блокам, чтобы сделать код более понятным.
Конфликты слов и групп кодов
Поскольку слова являются модальными, существует вероятность конфликтов. Например, если вы ввели «G00» (быстрое линейное движение) и «G01» (линейное движение с подачей) в одном и том же блоке, возникает конфликт, потому что контроллер не может выполнять оба действия. Как правило, он выбирает последний, но иногда это создает ошибку.
Fanuc и другие пытаются разрешить конфликты, используя так называемые «кодовые группы». Если два слова принадлежат к одной группе, то они конфликтуют друг с другом и не должны использоваться в одном блоке.
Комментарии
Говоря о понятности и ясности, не забывайте добавлять комментарии к коду в различных местах. Все, что вы помещаете в круглые скобки, является комментарием, который игнорируется при выполнении программы g-кода. Например:
% A сделать что-то простое g-code программа
O1000
N100 G00 X0 Y0 Z0 (Rapid to Part Zero)
%
Комментарий сообщает, почему мы перемещаемся в это конкретное место. Нет необходимости чрезмерно комментировать код — вещи, которые очевидны, не нуждаются в комментариях. Попробуйте прокомментировать все, что было трудно понять, когда вы писали G-код. Комментарии могут служить напоминанием о том, что вы узнали и чего пытались достичь. Если вы пытаетесь прочитать G-код и ломаете голову, добавьте несколько комментариев, когда разберетесь. Следующий парень, который прочитает этот код, скажет вам спасибо.
Комментарии как заголовки, разграничивающие разделы
Комментарии — это хороший способ разграничить разные разделы G-кода. Поместите вверху ту, которая содержит всю существенную информацию о вашей программе, которую оператор и будущие программисты сочтут удобной иметь:
%
(—————————————————— ——————)
(Простая программа g-кода ———————)
( Написано Бобом Уорфилдом, 18 июля 2011 г. ———————)
(— ——————————————————————)
O1000
N100 G00 X0 Y0 Z0 (Rapid to Part Zero)
%
Действительно полный заголовок программы должен включать такие вещи, как:
– Имя файла программы.
— Автор программы
— Дата версии
— История изменений — строка для каждой версии, в которой указывается, что изменилось, кто внес изменения и дата.
– Обработка и управление, для которых предназначена программа
– Единицы измерения: дюймы или мм
– Информация по настройке: Какой запас материала ожидается, какой размер и т. д.?
— Рабочие координаты: Что ожидается от рабочих координат? Где находится «Нулевая часть»?
– Информация о клиенте: Рабочим местам потребуется информация о том, к какому клиенту и номеру задания относится программа.
Рекомендуется также иметь заголовок для каждой подпрограммы, хотя нет необходимости повторять всю ту же информацию, которая уже находится в заголовке основной программы.
Программы CAM и другое программное обеспечение часто создают специальные комментарии
Программы CAM и другое программное обеспечение часто используют комментарии как хорошее место для хранения дополнительной информации, которую невозможно закодировать в G-код другим способом. Вот типичный пример из CAM-программы HSMWorks:
Это говорит нам, что имя CAM-файла было «TANKCONSTANTSCALLOP». Сразу ниже приведено определение инструмента. В этой программе используется ровно один инструмент «T1» со следующими характеристиками:
Они перешли на формат, который содержит больше информации для людей-операторов.
Следите за ними, если вы редактируете g-код, сгенерированный программой CAM. Они могут дать вам некоторую полезную информацию, и вы можете не захотеть удалять эти комментарии, если по какой-то причине к ним может получить доступ какое-то другое программное обеспечение.
Заключение
Теперь у вас есть прочная основа для использования станков с ЧПУ в качестве замены ручного станка, и вы узнали основы того, как программы G-кода составляются из блоков G-кода. Это хорошая отправная точка. С этого момента мы будем добавлять кирпичи в этот фундамент по специальным темам, которые позволят вам создавать все более и более мощные программы g-кода.
Упражнения
1. Получите руководство к контроллеру ЧПУ и просмотрите форматы адресов Word в редакторе G-Wizard, чтобы убедиться, что GWE правильно настроен для вашего контроллера.
2. Составьте простой формат заголовка, который вы планируете использовать для программирования G-кода. Используйте его для создания простой программы, которая ничего не делает, которая может служить исходным шаблоном при создании нового файла g-кода.
3. Если вы используете программу CAM, узнайте, какие у нее параметры для заголовков в файле G-кода, который она публикует.
4. Взгляните на несколько примеров файлов gcode.
Является ли ручная обработка быстрее, чем ЧПУ для простых деталей?
Список общих команд G-кода и их значение
Следующий список команд G-кода для токарных станков с ЧПУ и обрабатывающих центров отражает типичную интерпретацию команд, но они могут различаться у разных производителей контроллеров. Программы обработки с ЧПУ используют эти команды в сочетании с другими буквенными командами. G-коды обычно указывают функции обработки токарного или фрезерного станка, в то время как M-коды управляют работой самого станка с дополнительными буквами, представляющими адреса, такие как F для скорости подачи и S для скорости шпинделя, используемые в типичной программе.
Хотя G-коды обычно говорят сами за себя, в программе ЧПУ используется ряд соглашений. Программы начинаются и заканчиваются символом процента, и программа всегда именуется в формате от O0001 до O9999. G-код, по большей части, является модальным, что означает, что любая команда будет оставаться активной до тех пор, пока не будет отменена или сброшена другой командой. Инструменты перемещаются в соответствии с интерполяцией; то есть перемещение, которое сочетает в себе изменения координат X и Y, например, приведет в действие обе оси одновременно, чтобы переместить инструмент по прямой траектории.
Дополнительные сведения см. в других статьях этой серии, перечисленных в конце этой статьи.
Команды
В приведенной ниже Таблице 1 перечислены общие команды G-кода, а также их интерпретация как для токарных, так и для фрезерных операций.
Таблица 1 – Команды G-кода для токарных и фрезерных операций
Код
Токарная обработка
Фрезерование
Г00
Быстрое перемещение
Быстрое перемещение
Г01
Линейная интерполяция
Линейная интерполяция
Г02
Круговая интерполяция CW
Круговая интерполяция CW
Г03
Круговая интерполяция против часовой стрелки
Круговая интерполяция против часовой стрелки
Г04
Жилье
Жилье
Г09
Проверка точной остановки
Проверка точной остановки
Г10
Установка данных
Настройка данных
Г11
Отмена установки данных
Отмена установки данных
Г15
—
Полярные координаты
Г16
—
Отмена полярных координат
Г17
—
Обозначение плоскости XY
Г18
—
Самолет ZX обозначают
Г19
—
Самолет YZ обозначают
Г20
Установить английские единицы измерения
Установить английские единицы измерения
Г21
Установка метрических единиц
Установка метрических единиц
Г22
Проверка сохраненного хода на
Проверка сохраненного хода на
Г23
Проверка сохраненного хода
Проверка сохраненного хода
Г25
Обнаружение колебаний скорости вращения шпинделя на
Обнаружение колебаний скорости вращения шпинделя на
Зеркальное отображение для двойных револьверных головок
Вращение системы координат
Г69
Зеркальное отображение для двойных турелей отмена
Отмена поворота системы координат
Г70
Цикл чистовой обработки профиля
—
Г71
Цикл черновой обработки профиля направление оси Z
—
Г72
Цикл черновой обработки профиля направление оси X
—
Г73
Цикл повторения шаблона
Цикл высокоскоростного сверления
Г74
Цикл сверления
Цикл нарезания левой резьбы
Г75
Цикл обработки канавок
—
Г76
Цикл нарезания резьбы
Цикл чистового растачивания
Г80
—
Отмена фиксированного цикла
Г81
—
Цикл сверления
Г82
—
Цикл точечного сверления
Г83
—
Цикл сверления с выводом
Г84
—
Цикл нарезания правой резьбы
Г85
—
Цикл сверления
Г86
—
Цикл сверления
Г87
—
Цикл обратного растачивания
Г88
—
Цикл сверления
Г89
—
Цикл сверления
Г90
Цикл резки A A /Абсолютная команда B
Абсолютная команда
Г91
Инкрементальная команда B
Инкрементальная команда
Г92
Регистр положения инструмента B
Регистр положения инструмента
Г94
Скорость подачи в минуту B
—
Г95
Подача на оборот B
—
Г96
Постоянная поверхностная скорость
—
Г97
Постоянная скорость шпинделя
—
Г98
Скорость подачи в минуту A
Возврат на исходный уровень в фиксированном цикле
Г99
Подача на оборот A
Возврат на уровень R в фиксированном цикле
Примечания
Нижние индексы, прикрепленные к некоторым из последних элементов в столбце Turning, относятся к различию, сделанному между типом группы A и типом группы B, где коды различаются. Например, если тип группы B использует G90 и G91 для переключения между абсолютными и инкрементными командами, тип группы A вместо этого использует адреса U и W для идентификации этих перемещений.
Подпрограммы и макросы
Подпрограммы вызываются командой M98. Они используются для различных операций, таких как индексация оси Z между повторяющимися разрезами. Подпрограммы обозначаются буквой «P», а буква «L» указывает, сколько раз должна выполняться подпрограмма. Каждая подпрограмма заканчивается M99, которая возвращает контроллер к основной программе или предыдущей подпрограмме, если они вложены друг в друга. Другая распространенная подпрограмма — это та, которая сбрасывает модальные состояния до или после смены инструмента — шаг безопасности.
Предварительно запрограммированные функции, предоставляемые производителем станка, также считаются подпрограммами, но они вызываются в G-коде, например, цикл сверления G81.
Макросы позволяют станку с ЧПУ выполнять две важные функции. Создавая переменные, которые можно изменять, размеры элементов, такие как ширина канавки, можно регулировать без изменения программы. Они также позволяют той же программе обрабатывать семейство размеров деталей, которые могут быть представлены в виде таблицы на чертеже. Переменным присваиваются адреса, которые обычно вызываются в строке программы следующим образом: G00 X#123, что указывает машине быстро перейти к ячейке, сохраненной в переменной с адресом 123.
При использовании макросов следует соблюдать особую осторожность, так как число может быть введено слишком быстро для процесса, что может привести к повреждению и/или травме. Программисты ЧПУ регулярно встраивают проверки в программы, чтобы избежать таких катастроф.
Резюме
В этой статье представлено краткое обсуждение команд G-кода и их значений. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Полипропилен (ПП) — это термопластичный полимер пропилена (пропена).
Особенности полипропилена
Из-за разнообразия тары из полипропилена и её схожести с тарой из полистирола заготовители сырья неохотно берут эти два вида пластика на переработку. К тому же, сначала надо собрать достаточно большой объём пластика (несколько тонн), а после этого отправить на завод по переработке.
!!! Важно отметить, что плёнки (пакеты) и твёрдые товары (тара, крышки) хотя и имеют одинаковую маркировку, перерабатываются разными методами.
Применение полипропилена
На данный момент полипропилен занимает 2-е место в мире среди полимеров по объёму потребления, с долей 26% уступая только полиэтилену (пластики 02 и 04). Материал для производства плёнок (особенно упаковочных), мешков, тары, труб, деталей технической аппаратуры, пластиковых стаканчиков, предметов домашнего обихода, нетканых материалов, электроизоляционный материал, в строительстве для вибро- и шумоизоляции межэтажных перекрытий в системах «плавающий пол». Атактический полипропилен используют для изготовления строительных клеев, замазок, уплотняющих мастик, дорожных покрытий и липких пленок.
Что делают из полипропилена?
Автомобильные бамперы, внутреннюю отделку автомобилей, корпуса электроинструмента, упаковку из-под шоколадок, пакеты для риса, макарон и хлеба, пластиковые стаканчики для чая и йогуртов, крышки для банок и бутылок.
Куда сдать полипропилен (05, PP, ПП) в Москве:
проект Сборка (пункт приёма м. Сокол + экотакси)
проект Собиратор (пункт приёма м. Кантемировская + экомобиль)
акции Южном и Северном Бутово (полный перечень принимаемого тут)
пункт приёма в Мега Икея Химки
контейнеры компании Эколайн в САО и ЦАО г.Москвы — можно сдавать тетрапак, но пока что не доверяем им насчёт пластика 05 и 06 (возможно, идёт на сжигание)
контейнеры компании МКМ-Логистика — можно сдавать тетрапак, но пока что не доверяем им насчёт пластика 05 и 06
пункт приёма ЭкспертВтор (м. Дмитровская, дизайн завод Флакон)Пункт закрыт.
пункт приёма «Сфера Экологии» на Курской (только твёрдый)сбор ПП-тары временно приостановлен!
Контейнеры для пластиковых стаканчиков
Собирать полипропилен дома можно в любую ёмкость, которая вам удобна: коробка, пакет, мешок.
Для офисов, школ, детских садов и любых других учреждений мы разработали специальные удобные контейнеры. Приобрести их можно в нашем Полезном магазине: https://shop.sobirator.ru/katalog/konteynery-dlya-razdelnogo-sbora-vtorsyrya/dlya-plastikovyh-stakanchikov/
Контейнер станет отличным другом для вашего кулера в случае, если вы или ваши коллеги ещё не готовы полностью перейти на многоразовые кружки. Вся выручка от продажи контейнеров идёт на развитие движения.
Выбрать и заказать контейнеры для сбора пластиковых стаканчиков: https://shop.sobirator.ru/katalog/konteynery-dlya-razdelnogo-sbora-vtorsyrya/dlya-plastikovyh-stakanchikov/
Миф: в России не перерабатывают полипропилен и полистирол (05 и 06)
Существует мнение, что пластик 05 и 06 переработать нельзя. Это не так.
В России есть технологии и предприятия, перерабатывающие сложные виды пластика, просто вся эта отрасль работает на отходах производств, складов, магазинов, то есть с большими объемами одинакового вида отходов. Пластиковые отходы от физических лиц разнообразны (блистеры, игрушки, карточки, различные ёмкости, строительные отрезки и т.п.). Даже если они вручную рассортированы, нет гарантии, что всё будет точно нужного вида пластика. Если будет засор в виде пластика другого вида, то это может испортить партию и даже оборудование.
Поэтому обычному человеку так сложно сдать некоторые виды пластика.
Существуют технологии переработки смеси пластиков в стройматериалы (были представлены на выставке в Крокус Экспо). В регионах работают небольшие производства по изготовлению плитки, черепицы и пр. из смеси пластиков, однако ПВХ (03) для этих целей использовать нельзя.
🌍 Найти куда сдавать вторсырьё в вашем городе удобнее на нашей карте экологических движений России и СНГ
⁉ Если у вас есть дополнительная полезная информация для этой страницы — напишите нам на почту korosteleva@esja29. ru
Этот сайт — уникальный в России справочник о раздельном сборе, созданный и поддерживаемый экспертом движения «РазДельный Сбор» — Валерией Коростелёвой. Проекту пригодится ваша поддержка!
150 009
Пластик 5 (PP) — применение и утилизация пластика класса 5
Пластик – самый распространенный материал, используется в производстве и быту. Одним из наиболее часто используемых является пластик 5 (PP, ПП).
Пластик 5 — это полипропилен (ПП или PP).
Содержание статьи
Что такое пластик, кратко
Маркировка пластиков
Преимущества пропилена — пластик 5 (PP)
Характеристики пластика 5
Экологичность ПП
Области применения
Применение в автомобилестроении
Пластик 5 (РР) в виде одноразовой посуды
В чем заключается опасность применения пластика 5 (РР)
Возможность переработки полипропилена
Как собирать отходы из полипропилена для утилизации
Куда можно сдать отходы из РР
А как «У НИХ»?
Что такое пластик номер 5 в США?
Отправка по почте
Программа «Дай 5» (Gimme 5)
Матфея 25: Служения
Компания «TerraCycle»
Не допустите, чтобы пластик 5 попал в мусор
Что такое пластик, кратко
Пластик – это синтетический материал искусственного происхождения. Для его производства преимущественно используются тяжелые фракции нефти, уголь и природный газ. Пластические массы получаются в результате высокомолекулярных соединений.
Связующим материалом является полимер. К остальным материалам относятся наполнители, пластификаторы, красители. Наполнители снижают себестоимость, повышают прочность и жесткость.
При изменении условий полимеризации можно получать пластики с различными свойствами: твердые или более мягкие, непрозрачные или прозрачные. Красители обеспечивают широкую гамму оттенков.
Маркировка пластиков
Виды пластика
На полимерных упаковках производителями ставится знак в виде определенного символа. Он включает в себя информацию о типе материала и возможности его переработки для вторичного использования.
Тип пластика зашифрован в виде цифры, размещенной внутри треугольника из стрелок. Внизу каждого треугольника расположена буквенная аббревиатура вида пластика. Всего существует 7 наиболее распространенных видов пластика.
Одним из часто применяемых пластиков является полипропилен или пластик 5.
Так обозначается пластик 5 ПП
В центре треугольника из стрелок находится цифра «5», а внизу буквы «РР» (PolyPropylene). Так обозначается пластик 5 (РР). Аналогичная русская транскрипция этих букв «ПП».
Символы маркировки расположены обычно либо на самом предмете, либо на прилепленной к нему этикетке. На бутылках и емкостях для жидкостей маркировку часто выбивают на донышке. Она также встречается на днищах контейнеров для пищи и пластиковых тарелках.
Посуду, с маркировкой пластик 5, можно использовать для горячих напитков и продуктов.
Еще один знак – это расположенные рядом бокал и вилка. Это означает, что в такой посуде можно размещать любую еду, включая горячую. Наличие знака «Бокал-Вилка» означает, что тара с такой символикой прошла экспертизу, и имеет санитарно-гигиенический сертификат. Если этот знак перечеркнут, то значит, пластик не является пищевым.
Также имеются символы, которые указывают, возможно ли хранение материала в холодильнике, в частности в морозильной камере, разогрев в микроволновке, использование в пищевой промышленности, мойка в посудомоечной машине.
Знак «Зачеркнутые тарелка и ложка» говорит о том, что для горячей пищи эта посуда не предназначена. В изделиях с такой маркировкой подогревать еду в микроволновой печи нельзя.
Маркировка «Микроволновая печь» свидетельствует о возможности безопасно разогревать пищу в микроволновке в такой емкости. Выделяться токсичные вещества при этом не будут. Такой знак выглядит как стилизованное изображение этого бытового прибора с небольшими волнами.
Знак «Посудомоечная машина» разрешает использовать такой способ очистки изделия.
Знак «Снежинка» на пластиковой посуде означает, что такое изделие способно без ущерба выдерживать низкую температуру, и в нем можно хранить пищу в холодильнике.
Изображение перечеркнутого холодильника означает, что ставить еду в таком контейнере нельзя. Изображение градусника свидетельствует о стойкости к перепадам температуры.
При наличии маркировки в виде двух вращающихся стрелочек вторично использовать это изделие нельзя.
Для правильного использования необходимо разбираться, что означают знаки на пластиковых изделиях, особенно тех, которые контактируют с пищей. Если на изделии не имеется опознавательных знаков, то приобретать их не стоит.
Преимущества пропилена — пластик 5 (PP)
К достоинствам полипропилена относятся:
Низкая плотность.
Высокая механическая прочность.
Устойчивость к низким и высоким температурам.
Стойкость к перепаду температур.
Химическая стойкость по отношению к кислотам.
Термостойкость.
Устойчивость к растрескиванию вследствие коррозии.
Пластик 5 имеет хорошую способность восстанавливаться.
Возможность многоразовой эксплуатации.
Экологичность.
Изделия из пластика практически невозможно поцарапать. Для того, чтобы их разломить, понадобятся неимоверные усилия. Большим достоинством является легкость его обработки. Пластик 5 (полипропилен) можно сваривать, гнуть, подвергать распилу и сверлению.
Такие преимущества и хорошие потребительские свойства позволяют пластику 5 (РР) применяться в различных областях.
Характеристики пластика 5
Плотность полипропилена составляет 0,90 г/см3. Это является наименьшим значением среди остальных видов пластмасс. Пластик 5 способен без изменения выдерживать значительные механические нагрузки. Предел прочности при разрыве составляет 260-400 кг/см2.
Пластик 5 устойчив к воздействию большинства видов щелочей и к разбавленным кислотам, агрессивным моющим средствам, растворителям, маслам.
Термостойкость выражается в том, что он начинает размягчаться только при температуре 140 °C. А температурой плавления является 175 °C. Также с легкостью этот материал может выдерживать температуру минус 10 °C и ниже. Не страшны ему и быстрые переходы значений температур.
Хорошие диэлектрические свойства позволяют использовать полипропилен для изоляции.
Экологичность ПП
Пластик 5 (PP) является экологичным и нетоксичным материалом, безопасным для человека и окружающей среды. Это позволяет использовать его при производстве одноразовой посуды, емкостей для жидкости, сыпучих и других продуктов питания.
Такое качество допускает использование этого материала для детских товаров.
Области применения
Благодаря своим качествам пластик 5 находит применение в автомобильной промышленности, в фармацевтике, медицинской сфере.
Распространенная продукция из пластика 5 (РР):
ящики в холодильниках;
стаканчики для сметаны и йогуртов;
соски и пустышки для детей;
пакеты и контейнеры для пищевой продукции;
шприцы;
термоусадочная пленка;
банки для таблеток и блистеры.
Наиболее известно использование этого материала в качестве посуды и упаковок в пищевой промышленности.
Также полипропилен служит основой для получения модифицированных материалов.
Применение в автомобилестроении
Пластик 5 (РР) является идеальным материалом в сфере производства автомобилей. Благодаря своим достоинствам он получил неофициальное название «короля пластмасс».
Из полипропилена изготавливают практически все бампера. Также он используется для изготовления спойлеров, некоторых деталей в салоне, для приборных панелей, решеток радиатора, расширительных бачков, воздуховодов, крышек аккумуляторных батарей, корпусов, например, некоторых рециркуляторов воздуха.
Однако, следует учитывать, что высокая чувствительность к ультрафиолету и кислороду приводит к потери свойств при эксплуатации и появлению хрупкости. Нанесенная на чистый пропилен отделка не обладает необходимой степенью адгезии. Поэтому большее распространение в автомобилестроении получили модификации полипропилена.
Пластик 5 (РР) в виде одноразовой посуды
Этот материал может прекрасно использоваться для изготовления пластиковых бутылок, трубочек для напитков, тарелок различной емкости и формы, чашек, стаканчиков, ложек и вилок.
Из полипропилена изготавливают различную кухонную утварь в виде подносов, сушилок для посуды, ведер, дуршлагов, тазиков, совков для уборки мусора со стола.
Необходимо соблюдать некоторые правила. Слишком длительный контакт с пищей нежелателен. Вода в бутылках не должна застаиваться.
В пленку из полипропилена заворачивают фрукты и овощи, чтобы в целости и сохранности доставить их из магазина домой. После этого рекомендуется освободить их от такой упаковки, чтобы дать им возможность спокойно дышать.
В чем заключается опасность применения пластика 5 (РР)
Пластик 5 (ПП) относится к самому безопасному виду пластиков. Он является термоустойчивым, однако, при высокой температуре этот пластик начинает выделять такое токсичное вещество, как формальдегид.
Провоцируют выделение формальдегида или фенола также алкогольные и газированные напитки. Поэтому не стоит наливать их в емкости из полипропилена.
Из емкости, изготовленной из полипропилена, можно пить даже очень горячие напитки в виде кофе и чая, поскольку такой материал выдерживает без изменения температуру до 100 °C. Однако, без особой необходимости не стоит этого делать часто, поскольку выделяемые токсичные вещества могут нанести здоровью существенный вред.
Возможность переработки полипропилена
Пластик такого вида принимается на переработку. Этот материал отлично перерабатывается и используется повторно. Поэтому при наличии на таре этого знака можно без опасения ее использовать.
Имеются различные методы переработки пластмасс. Существуют предприятия, специализирующие на переработке некоторых марок пластиков методом экструзии. Он заключается в том, что получение новых изделий заключается в продавливании расплавленного материала через формирующее отверстие в специальном оборудовании, называемом экструдером.
При механической обработке из-за повышенной упругой деформации пластиков используется высокое давление. Износ применяемых инструментов при этом достаточно высокий, поэтому используются инструменты из высокоуглеродистой, быстрорежущей стали желательно из твердых сплавов.
Для распиливания пластмасс могут применяться ленточные и дисковые пилы, карборундовые круги.
Для сверления используются перовые (перьевые) сверла из быстрорежущей стали, обладающие шлифованными режущими кромками.
Для фрезерования пазов, канавок и плоскостей используются простые фрезы. Шлифовка пластических масс осуществляется с помощью шкурки, прикрепленной к деревянному кругу.
Изделия, имеющие простую форму, можно полировать фланелевым кругом без использования полировочных составов. Изделия сложной формы сначала полируют матерчатым кругом с пастой, а затем сухим кругом из фланели.
Переработка пластика частично решает проблему утилизации использованных пластмассовых изделий.
Как собирать отходы из полипропилена для утилизации
Отслужившие свой срок пластики являются ценным сырьем для переработки и получения из этого материала новых изделий.
В домашних условиях сбор использованного пластика можно производить в любую удобную емкость. Для этого подойдут мешки, коробки, пакеты.
Хранение собранных отходов следует осуществлять вдали от нагревательных приборов и подальше от открытого огня.
Куда можно сдать отходы из РР
Во всех регионах существуют небольшие производства, специализирующиеся на изготовлении черепицы и плиток из пластмассовых смесей. Нетрудно найти информацию о таких предприятиях и сдать им собранные отходы из полипропиленовых изделий.
Имеются контейнеры, куда можно поместить собранные отходы из пластика. Также существуют пункты по приему этих материалов. Плата за них зависит от вида и состояния отходов. Значительно дороже ценятся очищенные и рассортированные материалы.
Отдельно развит сбор пластиковых крышек — это самые доступные и удобные изделия для получения сырья. Они имеют наиболее высокую ценность, нежели остальные виды отходов из пластика 5. В развитых странах и городах проходят акции и программы по сбору таких крышек в школах, университетах, супермаркетах и т.д. Существуют даже виды благотворительности, основанные на сборе таких крышек и сдачи их за деньги в организации, изготавливающие различные пластиковые предметы.
Также ценятся пластиковые бутылки — их тоже легко сдать на переработку. Не преследуйте цель получить деньги за эти отходы — важно, чтобы как можно больше пластика приходило на утилизацию, и оставалось меньше мусора.
А как «У НИХ»?
Мы подготовили перевод одной интересной статьи американского издания earth911.com.
Переработка уже не та, что была раньше. Несколько лет назад Китай принял большую часть мировой переработки пластика, текстиля и бумаги. Но в 2018 году Китай ужесточил ограничения на то, что он будет принимать, из-за высокого уровня зараженных материалов, поставляемых США.
Теперь пришло время Соединенным Штатам взять на себя ответственность за переработку этих огромных потоков отходов внутри страны, чтобы улучшить экологическую обстановку. Это означает хранение и переработку большего количества перерабатываемых материалов в США, что также уменьшит углеродный след нынешнего подхода к переработке.
В Соединенных Штатах переработка пластика становится проблемой, особенно пластика номер 5. Мы собрали несколько решений, которые помогут вам не допустить попадания пластика на свалки.
Что такое пластик номер 5 в США?
Символ переработки на дне пластикового изделия не обязательно означает, что предмет можно переработать. Это число, окруженное стрелками, является идентификационным кодом смолы и сообщает пользователям, какой пластик они держат.
Цифра 5 с символом вторичной переработки указывает на полипропилен, часто сокращенно до PP.
Код пластиковой смолы номер 5, идентификационный код смолы для полипропилена, широко известного как пластик 5.
Этот тип пластика особенно твердый и термостойкий. Он часто используется в бутылочках с рецептурными лекарствами, стаканчиках для йогурта, баночках с хумусом, одноразовых столовых приборах и некоторых упаковках для средств личной гигиены, таких как дезодорант, лосьон или шампунь. Крышки одноразовых бутылок для напитков часто также изготавливаются из пластика номер 5, как и большое количество одноразовых лабораторных и медицинских принадлежностей в больницах, клиниках и лабораториях.
Пластмассы номер 5 хорошо принимались в США как в центрах переработки, так и в центрах утилизации до того, как в 2018 году была введена политика Китая «Национальный меч». Именно тогда Китай прекратил принимать наши пластиковые отходы для переработки.
Отправка по почте
В настоящее время существует несколько вариантов вторичной переработки полипропилена по почте. Прежде чем приступать к этим усилиям и расходам, проконсультируйтесь с местными переработчиками твердых отходов.
Программа «Дай 5» (Gimme 5)
Программа Gimme 5 проводится компанией Preserve, которая производит полностью переработанные пластиковые товары для дома и кухни. Раньше Preserve предлагал пункты приема полипропилена для переработки в магазинах Whole Foods, но прекратил программу в 2019 году.
Ограниченное количество магазинов по-прежнему принимают только пластиковые «одноразовые» столовые приборы. Теперь Preserve просит заинтересованных переработчиков присылать пластик номер пять по почте. Они приветствуют бутылки с лекарствами, контейнеры для йогурта, банки с хумусом и многое другое. Preserve также прекращает свою программу возврата зубных щеток по почте.
Примечание. Во время кризиса COVID-19 Preserve пришлось временно приостановить свою программу утилизации по почте. Посмотрите, какие виды пластика номер 5 принимает компания, и сохраните свой пластик для отправки по почте, когда ограничения, связанные с пандемией, будут сняты.
Матфея 25: Служения
Международная организация по оказанию гуманитарной помощи и помощи при стихийных бедствиях Mathew 25: Ministries принимает чистые пустые флаконы из-под таблеток. Они приветствуют бутылки с лекарствами, отпускаемыми по рецепту, а также маленькие бутылочки с таблетками, которые могут быть слишком малы для переработки. Министерство повторно использует бутылки в странах, где такие запасы ограничены, и перерабатывает те, которые они не могут использовать.
Многие рецептурные бутылки изготовлены из пластика номер 5. Изображение Bob Williams с сайта Pixabay
Компания «TerraCycle»
Гигант в переработке неперерабатываемых материалов — TerraCycle . Девиз этой компании — «уничтожим все отходы», и у них есть программы, которые позволяют перерабатывать практически любой тип отходов.
У TerraCycle нет специальной программы по переработке пластмасс номер 5, поэтому вам придется поискать на их веб-сайте лучшее решение. Существуют программы бесплатной утилизации, а также контейнеры Zero Waste Box, которые можно заполнить пластиком и отправить по почте в TerraCycle, за которые вы должны заплатить. Если большая часть вашего пластика номер 5 принадлежит определенной марке, проверьте, доступна ли программа бригады TerraCycle, которая позволяет вам бесплатно перерабатывать продукты.
Zero Waste Box
Если ни одна из бесплатных программ не отвечает вашим потребностям, вы можете рассмотреть возможность заказа за не очень небольшую плату одного из их ящиков с нулевыми отходами.
Не допустите, чтобы пластик 5 попал в мусор
Мы переживаем пластиковый кризис в США и во всем мире. Мы призываем вас сделать все возможное, чтобы избавиться от пластиковых отходов. Для начала стоит избегать пластмасс, таких как полипропилен, которые нельзя переработать или сдать на уничтожение.
Если возможно, откажитесь от пластика и покупайте йогурт оптом или в стеклянной таре — или делайте сами! Закажите трехмесячный запас лекарства вместо одного, сократив упаковку и сэкономите на походе в аптеку.
Кроме того, ищите способы повторного использования или переработки пластиковых контейнеров. Нам нравится идея делать ловцы солнца из прозрачных крышек и играть в боулинг из пластиковых бутылок.
Если ваш любимый продукт упакован в трудно перерабатываемый пластик номер 5, сделайте так, чтобы ваш голос был услышан! Сообщите производителю, что вам нравится его продукт, но вы хотите, чтобы он поставлялся в экологичной упаковке.
Художественное изображение Артура Коника с Pixabay. Первоначально опубликованная 6 мая 2020 г., эта статья была обновлена в декабре 2021 г.
Использование и применение полипропиленовых пластмасс
Полипропиленовые пластмассы
Полипропилен (ПП) является одним из наиболее часто используемых термопластов в мире. Применение полипропилена варьируется от пластиковой упаковки, пластиковых деталей машин и оборудования до волокон и текстиля. Это жесткий полукристаллический термопласт, который был впервые полимеризован в 1951 году и сегодня широко используется в различных бытовых и промышленных целях. Сегодня мировой спрос на полипропилен оценивается примерно в 45 метрических тонн, и эта цифра продолжает расти в геометрической прогрессии.
Применение для полипропилена
Полипропилен имеет скользкую тактильную поверхность, что делает его идеальным для
пластиковой мебели
применения с низким коэффициентом трения, такие как шестерни в машинах и транспортных средствах.
Обладает высокой устойчивостью к химической коррозии, что делает его отличным выбором для упаковки чистящих средств
отбеливатели
и
средства первой помощи
Обладает отличной усталостной прочностью и эластичностью, что обеспечивает ему заслуженную репутацию прочности и долговечности. Полипропилен также обладает высокими изоляционными свойствами, что делает его безопасным для использования в пластиковых корпусах электротоваров и кабелей. В форме волокна полипропилен используется не только для изготовления больших сумок, но и для гораздо более широкого спектра других продуктов, включая веревки, шпагат, ленту, ковры, обивку, одежду и снаряжение для кемпинга. Его водонепроницаемые свойства делают его особенно эффективным для морского сектора. автомобильная промышленность , полипропилен также широко используется, например, для корпусов аккумуляторов, поддонов и подстаканников, бамперов, деталей интерьера, приборных панелей и обивки дверей.
Наконец, медицинский мир также ценит водонепроницаемые свойства полипропилена, а также его гибкость, устойчивость к плесени, бактериям и химической коррозии. Хорошо очищает, выдерживает паровую стерилизацию. Некоторые медицинских приложений включают
шприцы
медицинские флаконы
Чашки Петри
контейнеры для таблеток
флаконы для образцов
Свойства материала и типы полипропилена
Этот универсальный термопласт и полимер популярен благодаря своим очень гибким свойствам, меньшей плотности и способности адаптироваться к ряду технологий изготовления. Различные вариации полипропилена привели к тому, что этот материал стал известен как «сталь» в индустрии пластмасс, поскольку его можно использовать и обрабатывать несколькими способами.
Существует два основных типа полипропиленовых термопластов:
гомополимеры
сополимеры
Гомополимеры содержат только мономеры пропилена в полукристаллической форме. Основные области применения включают текстиль, упаковку, трубы, медицинские компоненты и электротехнику.
Сополимеры делятся на статистические сополимеры и блок-сополимеры, полученные путем совместной полимеризации пропилена и этилена. Сополимеры содержат большее количество этилена, что приводит к улучшению желаемых свойств полипропилена. Они мягче гомополимеров, но имеют лучшую ударную вязкость.
Полипропилен может выступать как в качестве пластика, так и в качестве волокнистого термопласта. Это позволяет значительно расширить диапазон использования. Его можно использовать в качестве волокна, например, при производстве рекламных сумок и сумок для покупок «сумка на всю жизнь». Он мягкий, податливый и имеет относительно низкую температуру плавления , что делает его очень удобным для использования в процессе литья под давлением, где он поставляется в гранулах. Он также хорошо течет из-за низкой вязкости расплава.
Преимущества перед полипропиленом
Благодаря тому, что полипропилен хорошо адаптируется к процессу литья под давлением, его можно использовать для изготовления невероятно тонких слоев пластика. Он очень подходит для таких применений, как
петли на баночках для лекарств,
крышки на бутылочки с шампунем
и другие контейнеры, которые будут часто сгибаться и манипулироваться, и которые не должны ломаться.
Полипропилен может даже выдерживать скручивающие движения до 360 градусов без разрыва, и в результате его очень трудно сломать. Он относительно дешев, прост в производстве и легко доступен во многих странах и сообществах.
Высокая химическая стойкость и устойчивость к усталости повышают его долговечность и универсальность в качестве упаковочного материала, а также в качестве опции для шарниров и крышек бутылок, прикрепленных к основной бутылке тонким слоем пластика. Он может предложить большое разнообразие цветов, так как он может быть изготовлен как непрозрачный или прозрачный термопластик и использоваться, когда желательна некоторая передача света. Его более легкая плотность позволяет использовать его в приложениях, где снижение веса должно быть ключевым фактором.
Полипропилен является водонепроницаемым и чрезвычайно устойчивым к поглощению влаги, что повышает его упаковочные преимущества и гибкость в качестве упаковочного материала. Его полукристаллическая природа также обеспечивает высокую прочность на изгиб, что делает его устойчивым к общему износу и идеально подходит для предметов, которые должны подвергаться более высоким уровням физической нагрузки. Он также устойчив к плесени, плесени, гнили и бактериям.
Недостатки полипропилена
Одним из основных недостатков, когда речь идет об окружающей среде и сохранении глобальных ресурсов, является тот факт, что полипропилен не поддается легкой переработке. Когда он горит, он производит химическое изменение, которое нельзя обратить вспять. Если вы попытаетесь повторно нагреть полипропилен, который уже был расплавлен и сформирован, он просто сгорит, а не расплавится во второй раз. Необходимо рассмотреть другие методы переработки или повторного кондиционирования, стоимость которых значительно выше.
Эта низкая температура плавления также означает, что полипропилен легко воспламеняется и имеет ограниченную способность выдерживать более высокие температуры, а также подвержен разрушению и окислению под действием УФ-излучения. Наконец, в то время как глянцевая поверхность полипропилена делает его эстетичным и простым в обращении, это точно такое же свойство также затрудняет сцепление с другими поверхностями и материалами, такими как краски и клеи. При использовании полипропилена для изготовления соединения или шарнира необходимо использовать альтернативные методы склеивания, такие как сварка.
Безопасен ли полипропилен?
Хотя при производстве полипропилена используются некоторые потенциально токсичные химические вещества, он обычно считается безопасным готовым продуктом и обычно используется в пластиковой упаковке , которая включает в себя продукты питания и напитки, а также медицинские принадлежности . Хотя полипропилен не считается очень экологически чистым из-за сложностей в процессе переработки, изделия из полипропилена можно безопасно использовать повторно, и они достаточно прочны, чтобы противостоять нормальному износу в течение нескольких применений. Еще один момент, указывающий на безопасность полипропилена, заключается в том, что термопласт часто используется для изготовления
одноразовые стаканчики
плиты
бутылки
столовые приборы
для безопасного хранения, упаковки и защиты горячих напитков и горячих блюд.
Полипропилен (ПП) – типы, свойства, использование и структура
Что такое полипропилен?
Что такое полипропилен?
Полипропилен (ПП) — это тип полиолефина, который немного тверже полиэтилена. Это товарный пластик с низкой плотностью и высокой термостойкостью. Его химическая формула (C 3 H 6 )n.
Молекулярная структура полипропилена
Он находит применение в упаковочной, автомобильной, потребительской, медицинской, литой пленке и т. д. В зависимости от способа производства и состава полипропилен может быть:
твердый или мягкий,
непрозрачный или прозрачный,
легкий или тяжелый,
изолирующие или проводящие,
чистый или армированный дешевыми минеральными наполнителями, короткими или длинными стекловолокнами, натуральными волокнами или даже самоармирующийся.
Как производится полипропилен?
Как производится полипропилен?
Он изготовлен из полимеризации мономера пропена. Существует два основных способа синтеза полипропилена:
Полимеризация Циглера-Натта или
Металлоценовая катализная полимеризация
При полимеризации полипропилен может образовывать три основные цепные структуры. Они зависят от положения метильных групп:
Атактическая (аПП) – Неправильная метильная группа (СН 3 ) расположение
Изотактический (iPP) – Метильные группы (CH 3 ), расположенные на одной стороне углеродной цепи
Синдиотактический (sPP) – Схема с чередованием метильных групп (CH 3 )
Базовые цепные конструкции из полипропилена
Каковы свойства ПП?
Каковы свойства ПП?
Всегда полезно иметь информацию о свойствах термопласта заранее. Это помогает в выборе правильного термопластика для применения. Это также помогает оценить, будут ли выполнены требования конечного использования. Вот некоторые ключевые свойства и преимущества полипропилена:
Температура плавления — Температура плавления полипропилена находится в диапазоне.
Гомополимер: 160–165°C
Сополимер: 135–159°C
Плотность — ПП является одним из самых легких полимеров среди всех товарных пластиков. Эта функция делает его подходящим вариантом для приложений с малым весом.
Гомополимер: 0,904–0,908 г/см 3
Рандом-сополимер: 0,904–0,908 г/см 3
Ударопрочный сополимер: 0,898–0,900 г/см 3
Химическая стойкость
Превосходная стойкость к разбавленным и концентрированным кислотам, спиртам и основаниям
Хорошая устойчивость к альдегидам, сложным эфирам, алифатическим углеводородам, кетонам
Ограниченная стойкость к ароматическим и галогенированным углеводородам и окислителям
Воспламеняемость: ПП является легковоспламеняющимся материалом.
ПП сохраняет механические и электрические свойства при повышенных температурах. Это происходит во влажных условиях и при погружении в воду. Это водоотталкивающий пластик.
ПП обладает хорошей устойчивостью к растрескиванию под воздействием окружающей среды.
Он чувствителен к микробным атакам, таким как бактерии и плесень.
Обладает хорошей устойчивостью к стерилизации паром.
Узнайте больше обо всех свойствах полипропилена и их значениях — от механических и электрических до химических свойств; и сделайте правильный выбор для вашего приложения.
Какие бывают виды ПП?
Какие бывают виды ПП?
На рынке представлены следующие основные типы полипропилена:
Гомополимер полипропилена
Гомополимер PP является наиболее широко используемой маркой общего назначения. Он содержит только мономер пропилена в полукристаллической твердой форме. Основные области применения включают упаковку, текстиль, здравоохранение, производство труб, автомобилестроение и электротехнику.
Сополимер полипропилена
Это семейство производится путем полимеризации пропилена и этана. Далее он подразделяется на статистические сополимеры и блок-сополимеры.
Случайный сополимер полипропилена получают путем совместной полимеризации этилена и пропилена. Обычно он содержит этеновые звенья до 6% по массе. Эти звенья случайным образом включены в полипропиленовые цепи. Эти полимеры эластичны и оптически прозрачны. Это делает их подходящими для приложений, требующих прозрачности. Также подходит для продуктов, требующих превосходного внешнего вида.
В то время как в блок-сополимере полипропилена содержание этилена больше. Он колеблется от 5 до 15%. Он имеет сомономерные звенья, расположенные в виде регулярных узоров или блоков. Регулярный рисунок делает термопласт более прочным и менее хрупким, чем статистический сополимер. Эти полимеры подходят для приложений, требующих высокой прочности, таких как промышленное использование.
Полипропилен, ударопрочный сополимер
Пропиленовый гомополимер содержит смешанную фазу полипропиленового случайного сополимера. Он имеет содержание этилена 45-65%. Это полезно в деталях, которые требуют хорошей ударопрочности. Ударопрочные сополимеры в основном используются в упаковке, посуде, пленке и трубах. Они также используются в автомобильном и электрическом сегментах.
Вспененный полипропилен
EPP представляет собой гранулированный пенопласт с закрытыми порами сверхнизкой плотности. Он производит трехмерные изделия из вспененного полимера. Вспененный пенопласт EPP имеет:
более высокое отношение прочности к весу,
отличная ударопрочность,
теплоизоляция,
химическая и водостойкость.
EPP используется в автомобилях, упаковке, строительных изделиях, потребительских товарах и т. д.
Терполимер полипропилена
Терполимер PP состоит из сегментов пропилена, соединенных мономерами этилена и бутана (сомономер). Эти мономеры появляются случайным образом по всей полимерной цепи. Терполимер ПП имеет лучшую прозрачность, чем гомополимер ПП. Кроме того, введение сомономеров снижает кристаллическую однородность полимера. Это делает его пригодным для герметизации пленкой.
Полипропилен, высокая прочность расплава
Это материал с длинными цепочками. Он сочетает в себе как высокую прочность расплава, так и растяжимость в фазе расплава. Основные характеристики марок PP HMS включают:
широкий диапазон механических свойств,
высокая термостойкость, а
хорошая химическая стойкость.
Полипропилен HMS широко используется для производства мягких пенопластов низкой плотности для упаковки пищевых продуктов. Также используется в автомобильной и строительной промышленности.
Полипропилен на биологической основе
Это версия полипропилена на биологической основе. Его мономер пропилен получают из возобновляемого сырья. Содержание на биологической основе может варьироваться от 30 до 100%. Есть несколько поставщиков, предлагающих чистые сорта полипропилена на биологической основе, такие как:
Полифибра® и Трифилон БиоЛайт®
Смесь ПП/ПЭ — Terralene® PP 2509 и
В форме биокомпозита, такого как Terratek®, Sappi Symbio PP и т. д.
Как сделать выбор между гомополимером полипропилена и сополимером полипропилена?
Как сделать выбор между гомополимером полипропилена и сополимером полипропилена?
ПП гомополимер
ПП сополимер
Высокое отношение прочности к весу, более жесткая и прочная, чем сополимер
Хорошая химическая стойкость и свариваемость
Хорошая технологичность
Хорошая ударопрочность
Хорошая жесткость
Допускается контакт с пищевыми продуктами
Подходит для коррозионностойких конструкций
Немного мягче, но имеет лучшую ударную вязкость; прочнее и долговечнее, чем гомополимер
Лучшая стойкость к растрескиванию под напряжением и ударная вязкость при низких температурах
Высокая технологичность
Высокая ударопрочность
Высокая прочность
Не рекомендуется для применения в контакте с пищевыми продуктами
Потенциальные области применения гомополимера полипропилена и сополимера полипропилена практически идентичны
Из-за их общих свойств выбор между этими двумя материалами часто делается на основе нетехнических критериев.
Как сравнить основные типы ПП?
Как сравнить основные типы ПП?
Недвижимость
ПП, ударопрочный сополимер
Полипропиленовый сополимер
ПП Гомополимер
Плотность, г/см 3
0,9
0,9
0,9
Твердость по Шору, D
45-55
70-80
70-83
Напряжение при текучести, МПа
11-28
20-35
35-40
Удлинение при разрыве, %
20-700
200-600
15-600
Модуль упругости при растяжении, ГПа
0,4-1
1-1,2
1,1-1,6
Ударная вязкость с надрезом ASTM D256, Дж/м
110-Без перерыва
60-500
20-60
HDT A(1,8 МПа), °С
46-57
50-60
50-60
Минимальная рабочая температура, °С
от -40 до -20
от -20 до -10
от -20 до -10
Огнестойкость UL94
ХБ
ХБ
ХБ
Получите больше информации о свойствах полимера здесь »
Плохая устойчивость к УФ-излучению, ударам и царапинам
Охрупчивается при температуре ниже -20°C
Низкая верхняя рабочая температура, 90–120°C
Подвержен действию сильно окисляющих кислот, быстро набухает в хлорированных растворителях и ароматических соединениях
На устойчивость к тепловому старению отрицательно влияет контакт с металлами
Изменение размеров после формования из-за эффектов кристалличности – эту проблему можно решить с помощью зародышеобразователей Смотреть видео здесь »
Плохая адгезия краски
Тем не менее, полипропилен постепенно оптимизируется по своим характеристикам за счет улучшения его свойств с помощью различных добавок.
Как добавки помогают улучшить свойства полипропилена?
Как добавки помогают улучшить свойства полипропилена?
Добавление полимерных добавок позволяет преодолеть перечисленные выше недостатки. Они также могут улучшить физические и/или механические свойства полипропилена.
Например, полипропилен имеет плохую устойчивость к УФ-излучению. Добавление стерически затрудненных аминов к ПП обеспечивает светостабилизацию. Это увеличивает срок службы по сравнению с немодифицированным ПП. Ищете марку с УФ-стабилизацией? Вот полный список для вас »
Некоторые добавки включают:
Осветлители
Минералы
Токопроводящие наполнители
Смазочные материалы
Антипирены
Пигменты и прочие
Кроме того, наполнители и армирующие добавки обладают значительными свойствами, связанными с обработкой и конечным применением. Ознакомьтесь с заполненными или усиленными вариантами, чтобы выбрать класс по вашему выбору:
Полипропилен, армированный стекловолокном, марки
Полипропилен с минеральным наполнителем марки
Марки полипропилена, наполненного карбонатом кальция
Полипропилен, армированный углеродным волокном, марки
Кроме того, самоармирующиеся полипропиленовые композиты обладают рядом общих преимуществ, таких как:
концепция из мономатериала,
низкая плотность,
хорошие механические свойства,
высокая ударопрочность, а
снижение веса.
Благодаря сочетанию низкой плотности и хороших механических свойств. Это приводит к потенциальной экономии веса до 50% по сравнению с деталями, армированными стекловолокном. Его легко перерабатывать.
В области самоармирующегося полипропилена произошли значительные изменения. Эти достижения ликвидируют разрыв между изотропными полимерами и материалами, армированными стекловолокном. Самоармирующийся полипропилен предлагает уникальное сочетание характеристик обработки и производительности. Узнайте больше о преимуществах и области применения прямо сейчас »
Варианты полипропилена, армированного натуральным волокном, представляют собой интересный шаг на пути к дешевым экологичным композитам. Низкая плотность приводит к заметной экономии средств и снижению веса. Это на 27% больше, чем у полипропилена, армированного стекловолокном или тальком. Ищете марки, армированные бионаполнителями? Вот полный список для вас »
Использование новых добавок, процессов полимеризации и растворов для смешивания значительно повышает характеристики полипропилена. Следовательно, сегодня полипропилен рассматривается не как недорогое решение, а как материал с высокими эксплуатационными характеристиками. Он конкурирует с традиционными инженерными пластиками и металлами.
Как сравнивать производные полипропилена?
Как сравнить производные полипропилена?
Недвижимость
Термопластичный полиолефин
Полипропилен с наполнителем из талька
Стеклонаполненный полипропилен
Термопластик, армированный длинным волокном
Самоармирующийся полипропилен
Плотность, г/см 3
0,9-1
0,97-1,25
0,97-1,25
1,2
0,8-0,9
Твердость по Шору, D
10-99
75-85
70-88
—
—
Твердость по Роквеллу, M
—
10-45
—
—
—
Напряжение при текучести, МПа
—
22-28
19-70
—
—
Удлинение при разрыве, %
450-850
20-30
2-30
2
—
Модуль упругости при растяжении, ГПа
—
1,5-3,5
1-10
4-8
4-14
Ударная вязкость с надрезом ASTM D256, Дж/м
110-Без перерыва
30-200
38-160
—
—
HDT A(1,8 МПа), °С
—
56-75
50-140
160
—
Минимальная рабочая температура, °С
от -40 до -20
от -20 до -5
от -30 до -5
—
—
Огнестойкость UL94
ХБ
ХБ
НВ
ХБ
ХБ
Получите больше информации о свойствах полимера здесь »
Каковы формы полипропиленовых пленок?
Каковы формы полипропиленовых пленок?
Полипропиленовая пленка на сегодняшний день является одним из ведущих материалов. Используется для гибкой упаковки, а также для промышленного применения. Две важные формы полипропиленовых пленок включают:
Литая полипропиленовая пленка (CPP)
CPP широко известен своей универсальностью.
Суперстойкость к разрывам и проколам
Повышенная прозрачность
Повышенная термостойкость при высоких температурах
Отличные барьеры для влаги и атмосферных воздействий
БОПП растягивается как в поперечном, так и в продольном направлениях, создавая ориентацию молекулярных цепей в двух направлениях.
Ориентация увеличивает прочность на растяжение и жесткость
Хорошая стойкость к проколам и растрескиванию при изгибе в широком диапазоне температур
Обладают отличным блеском, высокой прозрачностью
Может быть глянцевым, прозрачным, непрозрачным, матовым или металлизированным.
Эффективный барьер против кислорода и влаги
Как переработать ПП?
Как обрабатывать ПП?
Полипропилен можно перерабатывать практически всеми способами. К наиболее типичным методам обработки относятся:
Литье под давлением с полипропиленом
Условия обработки для литья полипропилена под давлением включают:
Температура расплава: 200-300°C
Температура формы: 10-80°C
Сушка не требуется при правильном хранении
Высокая температура пресс-формы улучшит блеск и внешний вид детали
Усадка пресс-формы составляет от 1,5 до 3%. Это зависит от:
условия обработки,
реология полимера и
толщина конечной детали
Посмотрите бесплатное видеоруководство, чтобы сократить время цикла полипропилена и ограничить усадку деталей
Вспененный полипропилен (EPP) можно формовать в специальном процессе. EPP является идеальным материалом для процесса литья под давлением. Он в основном используется для серийного и непрерывного производства.
Посмотреть все марки полипропилена, подходящие для литья под давлением »
Экструзия с полипропиленом
Полипропилен можно экструдировать в трубы, пленку для раздува и литья, кабели и т. д. Условия обработки для экструзии полипропилена включают:
Температура плавления: 200-300°C
Степень сжатия: 3:1
Температура цилиндра: 180-205°C
Предварительная сушка: нет, 3 часа при 105-110°C (221-230°F) для измельчения
Просмотреть все марки полипропилена, подходящие для экструзии »
3D-печать из полипропилена
Будучи прочным, устойчивым к усталости и долговечным полимером, полипропилен идеально подходит для применений с низкой прочностью. В настоящее время сложно использовать полипропилен для процессов 3D-печати из-за его:
полукристаллической структуры и
сильная деформация
Некоторые производители оптимизировали свойства полипропилена или даже создали смеси с повышенной ударной вязкостью. Это делает его пригодным для приложений 3D-печати. Следовательно, рекомендуется тщательно обращаться к документации, предоставленной поставщиком, по температуре печати, печатной платформе и т. д.
Полипропилен подходит для:
Сложные модели
прототипов
Мелкие серии компонентов и
Функциональные модели
Посмотреть все марки полипропилена, подходящие для 3D-печати »
Другие методы обработки полипропилена
Выдувное формование
Прессование
Ротационное формование
Литье под давлением с раздувом
Экструзионно-выдувное формование
Инжекционно-выдувное формование
Экструзия общего назначения
Некоторые марки предназначены для вашего конкретного режима преобразования, такого как выдувное формование, компрессионное формование, термоформование и т. д. Ознакомьтесь с марками полипропилена с различными режимами преобразования здесь »
СОВЕТ: Чтобы выполнить определенные требования, попробуйте использовать аспект «Режим преобразования», чтобы сузить область поиска.
Можно ли перерабатывать полипропилен?
Можно ли перерабатывать полипропилен?
Все пластмассы имеют «Идентификационный код смолы/код переработки пластика», основанный на типе используемой смолы. Идентификационный код смолы полипропилена — 5. Полипропилен на 100 % пригоден для повторного использования.
Процесс переработки полипропилена
Процесс переработки полипропилена включает:
Плавление пластиковых отходов до 250°C для удаления загрязняющих веществ.
Удаление остаточных молекул в вакууме и затвердевание примерно при 140°C.
Этот переработанный полипропилен можно смешивать с первичным полипропиленом в количестве 50%.
Переработка полипропилена – основная проблема
Основная проблема при переработке полипропилена связана с потребляемым количеством. В настоящее время 1% полипропиленовых бутылок перерабатывается по сравнению с 98%-й степенью переработки бутылок из ПЭТ и ПЭВП вместе взятых.
Использование переработанного полипропилена (rPP)
Несколько приложений rPP включают:
Чехлы для автомобильных аккумуляторов,
Сигнальные огни,
Кабели аккумулятора,
Метлы,
Щетки,
Скребки для льда и т. д.
Удовлетворите насущный спрос на более экологичные полипропиленовые продукты (более легкие, пригодные для повторного использования, высокоэффективные марки ПЦР…) с помощью бета-нуклеации, чтобы получить преимущество над конкурентами. Пройдите этот эксклюзивный курс от отраслевого эксперта доктора Филипа Джейкоби.
Безопасен ли полипропилен?
Безопасен ли полипропилен?
Использование ПП считается безопасным. Это связано с тем, что он не оказывает заметного влияния с точки зрения гигиены труда и техники безопасности с точки зрения химической токсичности.
Чем ПП отличается от полиэтилена (ПЭ)?
Чем ПП отличается от полиэтилена (ПЭ)?
И ПП, и ПЭ очень похожи, но у них также есть характеристики, которые уникальны друг для друга. Эти функции могут быть расширены в зависимости от:
как они сделаны и
, для какого приложения они используются.
ПП является вторым наиболее используемым пластиком после полиэтилена. Они оба могут быть спроектированы так, чтобы быть прочными и легкими. Эти полимеры используются во многих областях, таких как бутылки и перчатки. Но PP имеет кристально чистую прозрачность, чем PE. ПП обладает отличными механическими свойствами. Обладает высокой устойчивостью к усталости, ударам, теплу и замерзанию.
PE прочный, но легкий, с хорошей устойчивостью к ударам и истиранию. Полипропилен тверже и может использоваться для механических и структурных применений.
Оба материала очень податливы и имеют относительно одинаковую ударопрочность. Это означает, что прочность не должна вызывать беспокойства при использовании этих пластиков. Плотность — еще один ключевой фактор, отличающий полиэтилен от полипропилена. Плотность полипропилена фиксирована и меняется только при наполнении. Выбор полиэтилена сильно зависит от различной плотности различных версий. Полиэтилен бывает низкой, средней и высокой плотности. Полиэтилен высокой плотности известен своим большим отношением прочности к плотности. HDPE считается более жестким, чем PP.
Вот краткий обзор их основных отличий:
Полипропилен
Полиэтилен
Мономеры пропилена составляют PP
Может быть изготовлен оптически прозрачным
PP проявляет высокую устойчивость к растрескиванию, кислотам, органическим растворителям и электролитам
Имеет высокую температуру плавления и хорошие диэлектрические свойства
PP более жесткий, чем полиэтилен
Мономер этилена марки PE
Его можно сделать только полупрозрачным, как молочник
PE лучше выдерживает низкие температуры
Это хороший электрический изолятор с хорошим сопротивлением скольжению
PE более прочный по сравнению с PP
Марки полипропилена
ПЭ марки
Если для ваших нужд больше подходит полиэтилен, узнайте больше о полимере здесь »
Как полипропилен бросает вызов полиэтилентерефталату (ПЭТФ)?
Как полипропилен противостоит полиэтилентерефталату (ПЭТ)?
В производстве выдувных бутылок полипропилен стал сильным конкурентом ПЭТ. Основные характеристики полипропилена по сравнению с ПЭТ включают:
Менее дорогой,
Легче по весу,
Более устойчив к высоким температурам горячего розлива и
Менее проницаем для влаги.
Полипропиленовые бутылки можно наполнять горячим способом при температуре до 100°C. В то время как ПЭТ не выдерживает температуры розлива выше 76°С.
В чистом виде ПП менее прозрачен, чем ПЭТ. Кроме того, газонепроницаемые свойства ПП не так высоки, как у ПЭТ, а ПП также уступает ПЭТ по жесткости. PP имеет примерно в пять раз более высокие влагозащитные свойства, чем PET. Но ПП примерно в 30 раз более проницаем, чем ПЭТ, для таких газов, как кислород и углекислый газ.
Производственные циклы полипропиленовых бутылок, как правило, дольше, чем ПЭТ-бутылок. ПП также имеет более узкий диапазон температур обработки, чем ПЭТ.
Но производители полипропиленовых смол и добавок, входящих в их состав, добиваются значительных успехов в преодолении этих недостатков, таких как:
Добавление осветлителей в полипропилен позволяет ему соответствовать прозрачности ПЭТ. Осветленные сорта полипропилена имеют прозрачность и блеск, сравнимые с ПЭТ.
Нуклеаторы могут ускорить образование кристаллов в ПП во время охлаждения. Таким образом, сокращается время цикла, а иногда также улучшается четкость. Ознакомьтесь с несколькими марками полипропилена с зародышеобразователем здесь »
Барьерные слои (сэндвич EVOH, покрытия и т. д.) позволяют полипропилену конкурировать по стоимости со стеклянной и ПЭТ-тарой во многих продуктах питания и напитках, обеспечивая при этом хорошие барьерные свойства.
Вышеуказанные шаги делают ПП конкурентоспособным по отношению к ПЭТ и могут значительно сократить это преимущество в цене. Но полипропилен по-прежнему является более экономичным выбором упаковки, чем ПЭТ, для многих применений.
Узнайте больше о ПЭТ, прежде чем принять окончательное решение о материале »
Чем нейлон отличается от ПП?
Чем нейлон отличается от полипропилена?
Полиамид и полипропилен различаются по своей индивидуальной структуре.
Линия упаковки в дой-пак. Цена, характеристики, отзывы
Линия упаковки в дой-пак. Цена, характеристики, отзывы
Главная
→
Каталог товаров
→
Упаковочное оборудование
→
Линия упаковки в дой-пак
Изначально используется плёнка с отпечатанным рисунком, далее оборудование выполняет все функции: производство упаковки с нанесением датировки, добавлением отверстия, наполнением и запечатывание. Наполнение может быть как жидким, так и твёрдым продуктом. Электрические элементы данной линии произведены известными японскими, немецкими и американскими марками. Если Вас заинтересовал данный технический продукт, нажмите на кнопку «узнать цену» и наш менеджер свяжется с Вами в ближайшее время. Также мы подготовили для Вас видео о том, как работает линия упаковки в дой-пак:
Поделиться:
Избранное Сравнить
«> Официальный дилер завода
Гарантия от 12 месяцев
Доступно в лизинг и факторинг
Описание
Доп. информация
Отзывы (0)
Процесс производства:
Включение оборудования, ожидание, когда температура достигнет постоянной величины → настройка параметров оборудования → подача пленки → производство пакета → нанесение даты → разрезание → установка носика → заполнение сырьём → запечатывание → передача готового изделия.
1. Механизм подачи пленки; 2. Пробивание отверстия; 3. Формование упаковочной пленки; 4. подача направления упаковочной пленки; 5. Механизм склеивания дна; 6. Запечатывание с одного бока; 7. запечатывание с другого бока; 8. Контроль; 9. Синхронизированная протяжка пакетов; 10. Ножницы; 11. Механизм приема пакетов; 12. Механизм защемления и удерживания пакета; 13. Отрезание уголка наискосок; 14. Механизм раскрытия пакета; 15. Установка носика; 16. Установка для запечатывания носика; 17. Запечатывание носика; 18. Механизм раскрытия пакета; 19. Раздувание пакета; 20. Заполнение содержимым; 21. Заполнение содержимым; 22. Совмещение краев пакета; 23. Запечатывание верха пакета; 24. Охлаждение и выравнивание; 25. Готовая продукция; 26. Выход готового изделия.
Технические параметры:
Подробно о оборудовании:
Линия упаковки в дой пак, Линия упаковки в дой пак цена, Линия упаковки в дой пак китай, Линия упаковки в дой пак купить
Гарантия: Гарантия от 12 месяцев (но не больше срока полезной службы).
Регион: Москве/Санкт-Петербурге/Екатеринбурге/Новосибирске/Челябинске/Омске/Казани/Сочи/Благовещенске/Владивостоке/Хабаровске и другие. Доставка в любой регион РФ.
TOP
Узнать цену
Контактное лицо:*
Телефон:
Электронная почта:*
Файл
Расскажите подробней о Вашей заявке:
Согласен с политикой обработки персональных данных.*
Быстрая заявка
Контактное лицо:*
Телефон:
Электронная почта:*
Расскажите подробней о Вашей заявке:
Согласен с политикой обработки персональных данных.*
Онлайн-заявка на лизинг оборудования
ПОДРОБНЕЕ О ЛИЗИНГЕ
Имя*
Номер телефона*
E-mail*
Город*
Сообщение
Оборудование ТЕТРА ПАК — Оборудование для пищевой, химической и фармакологической промышленности
Наши возможности:
Поставка комплектных линий и отдельных единиц оборудования Тетра Пак и Альфа Лаваль.
Монтаж, обвязка и пуско-наладочные работы, доработка конвейерной системы в соответствии с особенностями помещения заказчика.
Обучение специалистов заказчика.
Поставка оригинальных запчастей к оборудованию.
Сервисное обслуживание и плановый ремонт оборудования.
Работы по изменению форматов розлива на установленных машинах.
Услуги сопровождения производства нашими шеф-мастерами длительное время.
В комплект поставки могут также входить отделение для восстановления соков и оборудование для подготовки и обработки вина, молочных продуктов для розлива.
Перечень предлагаемого нами на сайте оборудования не является полным. Вы можете выслать запрос о другом интересующем Вас оборудовании. Технические характеристики любых машин и линий можно изменить или подобрать в соответствии с вашей продукцией. Мы гарантируем быстрый и компетентный ответ.
Линии розлива Тетра Пак:
Южно-Сахалинск : Поставка ,монтаж и наладка линии ТБА 19 для розлива молока в упаковку объемом 200 мл. в рамках программы “Школьное молоко “ на молочном комбинате «Южно-Сахалинский».Линия торжественно запущена в эксплуатацию губернатором Сахалинской области Олегом Кожемяко. Переналадка формата 200 BASE на формат 200 SLIM.
Михайловка, Волгоградской обл. Поставка, монтаж и наладка линии розлива молока ТБА 8 1000 Слим. Поставка, монтаж и наладка оборудования по стерилизации молока UHT Альфа Лаваль производительностью 6 500 л.ч.
Вольск, Саратовская обл. Поставка и монтаж под ключ цеха розлива молока и соков в составе: – Линия розлива Тетра Пак А3 Флекс на форматы пакетов 2.0 литра СЛИМ и 1.0 литра Призма; – Линия розлива Тетра Пак ТБА 9 на формат 200 мл; – Пастеризационная установка Альфа Лаваль ALFA LAVAL TETRA TERM ACEPTIC ТА MAXI 8 производительностью до 12 000 л/ч , гомогенизатор Tetra Alex 25 производительностью до 12 000 л/ч; – Пастеризационная установка Альфа Лаваль TETRA TERM ACEPTIC производительностью до 4 000 л/ч , гомогенизатор Tetra Alex 25 производительностью до 4 000 л/ч; – Отделение водонакопления и приготовления продукта к розливу;
Республика Адыгея, Гиагинский р-н, ст. Дондуковская , ООО «ТПК «Южный продукт»: Поставка и монтаж линии розлива ТБА 8 1000 Слим производительностью 6 000 пакетов в час.
ООО Новые технологии, Осинники, Кемеровская обл.: Линия розлива соков в упаковку Тетра пак производительностью 6 000 пакетов в час формата 1.0 л. SQUARE.
ТОО Алсу, Алматы,Казахстан -3 линии розлива Тетра пак для форматов.: – 1.0 литра СЛИМ – 2.0 литра СЛИМ – 200 мл.СЛИМ.
Гормолзавод № 2, Республика Беларусь, г. Минск: – Линия розлива Тетра пак ТВА 9 200 ml SLIM.
ООО Серпуховское поле,г. Серпухов,Россия.: -Линия розлива растительных сливок к производительностью 6 000 пакетов в час 1.0л. BASE ТВА 8.
Процессинговое оборудование:
Михайловка, Волгоградской обл., молочный комбинат: Поставка ,монтаж и наладка оборудования по стерилизации молока UHT Альфа Лаваль производительностью 6 500 л. ч.
Вольск, Саратовская обл.: Поставка и монтаж под ключ цех розлива молока и соков: – пастеризационная установка Альфа Лаваль ALFA LAVAL TETRA TERM ACEPTIC ТА MAXI 8 производительностью до 12 000 л/ч , гомогенизатор Tetra Alex 25 производительностью до 12 000 л/ч; – пастеризационная установка Альфа Лаваль TETRA TERM ACEPTIC производительностью до 4 000 л/ч , гомогенизатор Tetra Alex 25 производительностью до 4 000 л/ч; – отделение водонакопления и приготовления продукта к розливу.
ТОО Алсу,Алматы,Казахстан – Поставка и монтаж под ключ цех розлива соков. – Купажное отделение ,пастеризационное оборудование ,гомогенизатор, СИП мойка производительностью 20 000 л. в час.
Оборудование по упаковке и системы транспортеров собственного производства:
ОАО «Молочные продукты» г. Гомель Линия Тетра пак ТБА 8- автоматизация+ транспортеры для линии Тетра Пак ТБА 8 .
СХ ОАО «Белореченское» Иркутская область. Усольский район, п. Белореченский Автомат упаковки в картон модель МО-3 -10 000 в час – линия Пюр Пак.
ООО «МПО «Скоморошка» г. Кемерово упаковщик в картон модель МО-3 картонпакер линия Тетра Пак 6 000 упаковок в час форматом 1.0 л.
Гомельский винодельческий завод ,г. Гомель, Беларусь Упаковщик в картоный короб МО-3 с боковым и верхним закрытием короба -линия Тетра Пак 6 000 в час
Южно-Сахалинск молочный комбинат «Южно-Сахалинский» Поставка, монтаж и наладка автомата упаковки Тетра Пак объемом 200 мл. в термоусадочную пленку производительностью 7 500 упаковок в час – модель МО-3.
Заявка на оборудование
Компания «Машины и Технологии» придерживается принципа персонального подхода к клиенту и формирования конечной стоимости оборудования исходя из индивидуальных требований заказчика. Для получения прайса на интересующую Вас единицу оборудования, пожалуйста, заполните следующую форму.
Представьтесь *
Организация *
Электронная почта *
Город *
Телефон *
Интересующее оборудование *
Раскрыть дополнительные поля
Формат тары
Формат укупорки
Финальная упаковка
Дополнительное оборудование
Главная — Производство Упаковочные системы
PastPack OR Для упаковки контейнеров неправильной формы и материала. Машина для розлива и упаковки Pastpack OR разработана как специальная версия базовой ротационной машины. Читать далее Линии розлива ППС предназначены для автоматического розлива (весовых/объемных) жидких и вязких молочных продуктов в ПЭТ-бутылки и их закручивания пластиковыми крышками с защитным хомутом , а также пастообразной продукции в готовую упаковку. Читать далее Наше оборудование решает как базовые, так и сложные задачи по розливу и упаковке в пищевой промышленности, фармацевтическая и химическая упаковочная промышленность и может похвастаться ассортиментом из более чем 100 моделей. Читать далее
Качество, надежность и гибкость.
PPS специализируется на продаже широкого спектра высококачественных систем упаковки, контроля и маркировки, машин и оборудования.
Мы имеем более чем 30-летний опыт работы в упаковочной промышленности и установили долгосрочные отношения со многими наиболее уважаемыми международными поставщиками.
Наше оборудование для розлива и упаковки сочетает в себе высокую производительность, исключительную функциональность и самое лучшее европейское качество, а наша высокотехнологичная производственная среда гарантирует, что все проекты выполняются в соответствии с самыми высокими техническими требованиями.
ПОДРОБНЕЕ О НАС
ИЗ НАШЕГО БЛОГА
Последние новости
Новости упаковки
0 комментариев
Colamark Bravo Cartoner
Уникальный механизм открывания картонных коробок, быстросменные детали, эргономичный дизайн, балконная конструкция, плавная работа и множество характеристик делают Bravo лучшим предложением среди всех…
Новости упаковки
0 комментариев
Colamark A11 в действии
Посмотрите Colamark A11 в действии
A11 — это специально разработанная машина для сборки плунжерного штока и маркировки на предварительно заполненных…
Новости упаковки
0 комментариев
4 выявленных тренда
Корпорация МИТАС приглашает на первую эксклюзивную фармацевтическую выставку Africa Pharma Expo. 10-11 апреля 2018 г. в Галлахерском конференц-центре, Йоханнесбург. Загляните на стенд…
Новости упаковки
0 комментариев
PPS на выставке Africa Pharma Expo
Корпорация МИТАС приглашает на первую эксклюзивную фармацевтическую выставку Africa Pharma Expo. 10-11 апреля 2018 г. в Галлахерском конференц-центре, Йоханнесбург. Загляните на стенд…
ВОПРОСЫ И ОТВЕТЫ
Часто задаваемые вопросы
Какое оборудование для упаковочных линий вы можете поставить?
Мы можем поставить все оборудование от самого розлива до самого конца линии. Например, мы можем поставить наполнители, жидкие и сухие продукты, обертки, устройства для сборки картонных коробок, конусы, укладчики на поддоны, дозаторы, этикетировщики, принтеры, верификаторы.
Мы поставляем каждый продукт, который вы ожидаете от любой производственной линии.
Предоставляете ли вы местную техническую поддержку?
Мы обеспечиваем самую качественную техническую поддержку на всем Африканском континенте.
Можете ли вы помочь и проконсультировать наш бизнес по увеличению производительности и эффективности на нашем предприятии?
У нас есть опыт оказания помощи клиентам в выявлении узких мест на их производственных объектах и внедрении решений для преодоления этих узких мест.
Мы также консультируем предприятия, в которых внедрение автоматизации может значительно улучшить результаты за счет включения определенных ключевых единиц оборудования.
Вы поставляете определенные комплектные упаковочные линии?
СВЯЖИТЕСЬ С НАМИ
Свяжитесь с нами
Позвольте нам помочь вам найти решение, отвечающее вашим потребностям
Мы гордимся тем, что можем предоставить идеально адаптированное решение для ваших производственных и упаковочных линий.
Линия по производству картонных коробок-саше, Автоматическая линия по производству порошковой упаковки DXD-FL1200, Компания по производству упаковочных машин Sanyang Technology Co., Ltd.
Приложения:
Эта производственная линия в основном состоит из многолинейной упаковочной машины, сортировки и транспортировки небольших пакетов, онлайн взвешивание, обнаружение отходов, подсчет, укладка и транспортировка мешков, упаковка в картонные коробки машина.
Эта машина подходит для упаковки мелких гранул для лекарств и продуктов питания. Процессы формирования мешков, измерения, наполнения, запечатывания, резки, подсчета и коды горячего прессования могут выполняться автоматически. Упаковочный материал включает несколько видов термосвариваемого ламинирования, таких как OPP/PE, PET/Al/PE с покрытием, PET/PE, НЕЙЛОН/ПЭ и т.д.
Он может определять динамический вес онлайн и автоматически отбраковывать отходы. Может завершить автоматическую подачу, изготовление пакетов, наполнение, печать / тиснение, разрыв резка, пробивка, упаковка и конвейер, взвешивание одного мешка, меньшее количество пропущенных мешков Отбраковка, автоматическая смена готовых мешков напрямую и автоматический подсчет рулевая трансмиссия, готовый мешок в мешок-подушку, готовый продукт вывод, процессы подсчета продуктов могут быть автоматически завершены.
Использование:
Подходит для упаковки порошковых материалов в областях фармации, пищевой промышленности и повседневной промышленности.
Главная / Каталог товаров / Все для строительства и монтажа / Строительное, грузоподъемное оборудование* / Бетоносмесители* / Бетоносмеситель TOR 220л
Описание и характеристики
Отзывы
Доставка и оплата
Код товара
0001000337
Производитель
TOR
Артикул
1005839
Единица продажи
Штука
Мощность двигателя, Вт
850
Объем бака, л
220
Объем готового замеса бетонной смеси, л
140
Вес, кг
60
Напряжение,В
220
Венец
Чугунный
Вес, кг 60 Объем барабана, л 220 Напряжение, В 220 Венец чугунный Тип двигателя электрический Габариты, мм 1185х838х1345 Мощность (Вт) 850 Количество оборотов барабана, об/мин 24 Частота, Гц 50 Объем готового раствора, л 140 Диаметр загрузочного отверстия, мм 390 Тип подключения сетевая вилка
Оставить отзыв
Пока нет ни одного отзыва о данном товаре. Ваш отзыв будет первым!
Близкие по цене похожие товары
Код товара: 0000980489
Бетоносмеситель БСЛ-200, 200 л, 1000 Вт// Сибртех
Производитель
СИБРТЕХ
Артикул
95475
Код товара: 0000994473
Акция! Бетоносмеситель RedVerg RD-СМ180N
Производитель
RedVerg
Артикул
RD-СМ180N
Код товара: 0000998660
Бетоносмеситель BM 148C Patriot 450Вт 140кг
Производитель
Patriot
Артикул
577300148
Код товара: 0065733
Бетоносмеситель В-125, 550Вт, 130л//Denzel
Производитель
DENZEL
Артикул
95421
Код товара: 0001040231
Бетоносмеситель БСЛ-120, 120 л, 500 Вт// Сибртех
Производитель
СИБРТЕХ
Артикул
95470
Код товара: 0065734
Бетоносмеситель В-180, 700Вт, 180л//Denzel
Производитель
DENZEL
Артикул
95423
Код товара: 0043113
Бетоносмеситель В-200, 1000Вт, 200л//Denzel
Производитель
DENZEL
Артикул
95424
Код товара: 0000980490
Бетоносмеситель БСЛ-180, 180 л, 700 Вт// Сибртех
Производитель
СИБРТЕХ
Артикул
95474
Код товара: 0065743
Бетоносмеситель В-160, 700Вт, 160л//Denzel
Производитель
DENZEL
Артикул
95422
Другие товары раздела бетоносмесители*
Код товара: 0003423
Бетоносмеситель GARDEN KING БМ-180Т(900вт)
Производитель
Garden King
Артикул
БМ-180Т
Код товара: 0003424
Бетоносмеситель GARDEN KING БМ-200Т(1000вт)
Производитель
Garden King
Артикул
БМ-200Т
Код товара: 0003425
Бетоносмеситель GARDEN KING БМ-220Т(1000вт)
Производитель
Garden King
Артикул
БМ-220Т
Код товара: 0003697
Бетоносмеситель БМ-160
Производитель
Вихрь
Артикул
БМ-160
Код товара: 0003698
Бетоносмеситель БМ-200
Производитель
Вихрь
Артикул
БМ-200
Код товара: 0003699
Бетоносмеситель БМ-180
Производитель
Вихрь
Артикул
БМ-180
Код товара: 0043113
Бетоносмеситель В-200, 1000Вт, 200л//Denzel
Производитель
DENZEL
Артикул
95424
Код товара: 0065733
Бетоносмеситель В-125, 550Вт, 130л//Denzel
Производитель
DENZEL
Артикул
95421
Код товара: 0001008879
Бетоносмеситель СМ20200RF 1200Вт 200л Sturm
Производитель
Sturm
Артикул
CM20200RF
Код товара: 0001014547
Бетоносмеситель СМ20180RF 1000Вт 180л Sturm
Производитель
Sturm
Артикул
СМ20180RF
Код товара: 0001016544
Бетоносмеситель Калибр БСЭ-200//Россия
Производитель
Калибр
Артикул
060317
Код товара: 0001040231
Бетоносмеситель БСЛ-120, 120 л, 500 Вт// Сибртех
Производитель
СИБРТЕХ
Артикул
95470
Код товара: 0001040233
Бетоносмеситель БСЛ-140, 140 л, 500 Вт// Сибртех
Производитель
СИБРТЕХ
Артикул
95472
Предлагаем Вам купить бетоносмеситель TOR 220л по выгодной цене 20 999 . Мы очень тщательно следим за качеством реализуемой продукции и отдаем предпочтение только проверенным производителям.
Чтобы купить бетоносмеситель TOR 220л в нашем интернет-магазине Вам достаточно оформить заказ любым удобным способом:
На сайте. Для этого нужно выбрать понравившиеся Вам товары, положить их в корзину и оформить покупку (не займет много времени).
По телефонам 8 (8453) 64-30-40, 8 (8453) 64-46-60. Наши операторы проконсультируют Вас по всем вопросам, связанных с товаром, и примут Ваш заказ на обработку.
По электронной почте [email protected]. В письме необходимо указать наименования (коды) выбранных Вами товаров и их количество, а также данные о себе: Ф.И.О., контактный телефон и e-mail.
Продолжая использовать наш сайт, Вы принимаете пользовательское соглашение на обработку файлов _COOKIE и пользовательских данных в целях повышения качества функционирования сайта, проведения ретаргетинга и статистических маркетинговых исследований. Если Вы не хотите, чтобы Ваши данные обрабатывались, необходимо соответствующим образом установить настройки браузера или не использовать сайт.
Подготовка и отбор проб | Портативная бетоно-бетономешалка
Когда вы работаете с асфальтом, постоянное тестирование образцов материала для дорожного покрытия может помочь вам избежать многих проблем до того, как они возникнут. Имея это в виду, крайне важно, чтобы у вас было высококачественное оборудование для подготовки и сбора образцов для подготовки образцов к тестированию. Здесь, в Forney, у нас есть широкий ассортимент портативных цементных и бетоносмесителей, а также все аксессуары, которые могут вам когда-либо понадобиться для испытаний асфальта.
Процесс подготовки и отбора проб начинается с одного из наших устройств для перемешивания цемента и бетона. Мы предлагаем бетономешалки объемом от 5 до 20 литров с двигателем на 110 В или 220 В по вашему выбору. Независимо от того, какой размер вы выберете, эти сверхмощные трехскоростные лабораторные миксеры включают в себя плоскую алюминиевую мешалку и чашу из нержавеющей стали.
ПОДРОБНЕЕ НИЖЕ…
ПОДРОБНЕЕ…
Мы также предлагаем портативные бетономешалки и бетономешалки, позволяющие перенести процесс испытаний из лаборатории в полевые условия. У нас есть варианты на 5 галлонов и 10 галлонов, каждый из которых оснащен двигателем мощностью ½ л.
Для подготовки и сбора проб также может потребоваться довольно много аксессуаров, и у Forney есть широкий выбор этих инструментов. Например, мы продаем много различных размеров и стилей сменных лопастей для смешивания и венчиков из проволочной петли из нержавеющей стали. Мы даже предлагаем комплекты нагревателей для смесителей, которые позволяют безопасно нагревать образцы асфальта в колбонагревателе под чашей для смешивания. Если вам нужна помощь в поиске подходящих продуктов для подготовки и сбора проб, просто позвоните нам по телефону 800-367-639.7 и мы поможем вам найти то, что вам нужно.
Посмотреть как Сетка
Список
Позиции 1-15 из 31
Страница
Вы сейчас читаете страницу 1
Страница 2
Страница 3
Страница Следующий
Сортировать по
Позиция наименование товара Цена Установить нисходящее направление
Показывать
15 30 45 60
на страницу
Посмотреть как Сетка
Список
Позиции 1-15 из 31
Страница
Вы сейчас читаете страницу 1
Страница 2
Страница 3
Страница Следующий
Сортировать по
Позиция наименование товара Цена Установить нисходящее направление
Показывать
15 30 45 60
на страницу
Магазин по
Варианты покупок
Категория
Какой размер, мощность и барабан?
В предыдущей статье я рассмотрел основные типы настольных бетоносмесителей для сборного железобетона: барабанные, растворные и с вертикальным валом. В этом посте объясняется, как определить размер, источник питания и стиль барабана после того, как вы выбрали тип микшера.
Размер миксера
Размер миксера зависит от того, сколько бетона вы планируете приготовить за один раз. Многое зависит от консистенции бетона (жидкий или жесткий) и от того, сколько людей задействовано в процессе. Другие факторы включают цену, место для хранения и типичный размер партии.
Самые маленькие доступные смесители обычно могут приготовить около 200 фунтов «обычного» бетона или бетона для бетонных столешниц, который имеет консистенцию и состав, аналогичный обычному бетону. Эти небольшие миксеры недороги и достаточно портативны. Двести фунтов бетона — это примерно 1-1/3 кубических фута бетона; при толщине 1-1/2 дюйма такое количество бетона составляет около 10,5 квадратных футов столешницы.
Самые большие бетономешалки имеют максимальный объем 12 кубических футов и могут производить 1100 фунтов или 7-1/3 кубических футов бетона за одну загрузку. Эти монстры могут одновременно покрывать около 58 квадратных футов столешницы, что примерно соответствует размеру средней кухонной столешницы.
Как правило, большинство людей выбирают миксеры объемом от 6 до 9 кубических футов. В этом диапазоне размеров возможны размеры партии от менее 300 фунтов до почти 500 фунтов. При выборе размера миксера важно учитывать наименьшую партию, а также наибольшую партию, которую вы будете делать. Очень большие смесители могут быть не в состоянии эффективно смешать небольшую партию бетона, которая требуется для одной маленькой ванны.
Небольшие мастерские, в которых в процессе смешивания и отливки задействовано всего несколько человек, могут предпочесть производить более мелкие и управляемые партии. Они могут быть не в состоянии обрабатывать одну большую партию бетона до того, как она потеряет пригодность для обработки, в то время как более крупный цех, имеющий больше рабочих рук, может легко и быстрее справиться с большой партией.
Для данного размера барабана можно эффективно смешать меньше бетона, если бетон жесткий, и больше бетона, если бетон жидкий. Вообще говоря, миксер может обрабатывать примерно от ¼ до 1/3 заявленного объема при смешивании жесткого бетона и около ½ или более заявленного объема при смешивании жидкого бетона. Тип микшера также является здесь важным фактором; барабанные смесители и смесители с вертикальным валом могут производить больше бетона при заданном размере барабана, чем растворосмесители.
Бензин или электричество?
Бензиновые двигатели являются наиболее распространенным источником энергии для больших буксируемых миксеров. Плюсы в том, что они автономны. Внешний источник питания не требуется, поэтому они не зависят от условий рабочей площадки. Недостатком является то, что они громкие, горячие, требуют бензина и периодического обслуживания. Самый существенный минус это выхлоп. Бензиновые смесители никогда не должны использоваться внутри помещений, так как выхлопные газы двигателя могут быть смертельными из-за накопления окиси углерода и двуокиси углерода.
Электродвигатели гораздо чаще используются на небольших стационарных миксерах, но часто доступны в качестве дополнительных источников питания на больших буксируемых миксерах. Двигатели бывают разного напряжения и мощности. Обычно в небольших миксерах используются двигатели на 110 вольт мощностью от 1/3 до 1-1/2 лошадиных сил (л.с.), в то время как в более крупных миксерах используются двигатели на 220 вольт мощностью от 1 до 5 л.с.
Преимущество 110 вольт в том, что оно доступно практически везде, где есть электричество. Недостатком является то, что электричество 110 вольт потребляет вдвое больше силы тока, чем электричество 220 вольт для двигателя той же мощности. Для большей силы тока требуются шнуры питания гораздо большего сечения и более высокая номинальная сила тока в розетке. И наоборот, электричество на 220 вольт позволяет использовать двигатели большей мощности, но электрические розетки на 220 вольт могут быть доступны не во всех местах.
Преимущество электродвигателей заключается в том, что они часто не требуют обслуживания или требуют очень мало обслуживания. Двигатели тихие, компактные и могут увеличить покупную цену всего на несколько процентов. И их можно использовать внутрь.
Недостатком является то, что для более крупных миксеров электродвигатели являются опциями, которые необходимо заказывать; лишь немногие напольные модели поставляются с электродвигателями. На некоторых рабочих местах может не быть источника питания, необходимого для миксера.
Электродвигатели более эффективны и обеспечивают больший крутящий момент, чем бензиновые двигатели. Например, большой барабанный смеситель, способный смешивать около 7,5 кубических футов (или 1100 фунтов) бетона, требует только электродвигателя мощностью 2 л.с., но для выполнения той же работы требуется бензиновый двигатель мощностью от 10 до 11 л.с. Для смесителя с вертикальным валом аналогичного размера потребуется электрический 5-сильный или 9-сильный.Бензиновый двигатель HP для его питания.
Стальной или пластиковый барабан?
Стальные бочки являются наиболее распространенным материалом и поэтому доступны в более широком диапазоне размеров и стилей миксеров, чем пластиковые бочки.
Приспособление для заточки ножей фуганка или рейсмуса
Ножи для фуганка тупятся довольно быстро, особенно если они относятся к дешевой категории. Такой нож нужно затачивать после каждого применения и материал выдерживает ограниченное количество заточек, после чего нужно покупать новый нож. В принципе, ничего страшного в это процессе нет, если бы не одно «но». Безнадежно испортить нож можно уже первой заточкой, так что важно правильно соблюдать угол для правки. Но как это сделать, если у вас нет специального станка для этой цели? И в принципе, можно ли заточить такой инструмент вручную? Можно, и на практике это доказал автор англоязычного YouTube-канала Paoson WoodWorking. Он предложил своим зрителям простое ручное приспособление, которое позволяет ровно заточить лезвия под нужным углом. Вы можете без труда изготовить такое же для своей мастерской.
Читайте в статье
1 Что потребуется для изготовления заточного инструмента
2 Как подготовить ножи к заточке
3 Изготовление приспособления для заточки лезвий
4 Как точить ножи ручным приспособлением
Что потребуется для изготовления заточного инструмента
Чтобы сделать ручное приспособление, вам потребуется деревянный брусок, желательно из твердой породы дерева, например – дуба. Кроме него вам пригодятся 6 болтов. Для обработки инструмента нужна пила и дрель.
ФОТО: YouTube.comСама конструкция будет выглядеть, как на этой 3D модели: вверху расположена удобная ручка, за которую можно крепко держаться, а внизу рабочая поверхность, в которой фиксируются снятые со станка ножи
Как подготовить ножи к заточке
Чтобы заточить нож, его нужно предварительно внимательно осмотреть. Если вы заметили на ноже небольшой изгиб – это нормально, это сделано специального для того, чтобы увеличить прочность крепления лезвия и увеличить жесткость режущего края.
ФОТО: YouTube.comГораздо хуже, если вы заметили на ноже сколы или трещины. Ножи с трещинами вообще больше нельзя использовать, это опасно, а сколы могут образоваться, например, если вы строгали старые доски и пропустили гвоздь. Такой нож вручную выправить очень сложно, лучше обратиться с профессионалам, которые помогут решить эту проблему на станкеФОТО: YouTube.comПеред ручной заточкой нужно обезжирить поверхность лезвия любым доступным для вас средством. Удалите с ножа появившуюся ржавчину
Изготовление приспособления для заточки лезвий
Срез строгального ножа находится под углом в 40 градусов, следовательно, нужно зафиксировать его под этим углом для заточки. На всякий случай проверьте угол заточки доступными вам инструментами.
ФОТО: YouTube.comНа заготовке-бруске нужно сделать пропил глубиной примерно в 1.2 сантиметра под необходимым углом. В эту прорезь будет помещаться лезвие ножа. Обратите внимание на толщину ваших ножей, они бывают разнымиФОТО: YouTube.comЧтобы сформировать на инструменте ручку, нужно в боковых частях с двух противоположных сторон выбрать древесину, как показано на фото, и отшлифовать эту часть шкуркой, чтобы не занозить ладони во время работыФОТО: YouTube.comВ нижней части плашки с каждой стороны разреза через равные промежутки следует просверлить по 3 отверстия для фиксации болтовФОТО: YouTube.comЭти болты будут прижимать лезвие в пазу и не давать ему смещаться во время заточки, Фиксация достаточно надежнаяФОТО: YouTube. comТеперь можно поставить лезвия в пазы, зафиксировать их и приступать к заточке
Как точить ножи ручным приспособлением
Проверить, правильно ли вы подобрали угол на ручном приспособлении очень просто.
ФОТО: YouTube.comПрежде чем точить ножи, нанесите на кромку лезвия краску маркером и по истиранию этой краски вы сразу увидите, насколько правильно идет заточка
Второй важный момент – правильное размещение наждачной бумаги. Рекомендуется наклеить ее на стекло или идеально ровную каменную столешницу. Для наклеивания можно использовать тонкий двусторонний скотчи или приобрести наждак с уже готовым липким слоем на обратной стороне.
ФОТО: YouTube.comДля заточки используют три вида шкурки: сначала грубую, для предварительного выравнивания. Держите приспособление за ручку и направляйте движения вперед-назад с небольшим нажимомФОТО: YouTube.comПотом последовательно меняйте наждак на более мелкий для точной правкиТаким образом вы довольно быстро и точно вернете лезвиям фуганка или рейсмуса былую остроту, причем без особых усилий и специальных инструментов
Приспособление действительно очень простое и пользоваться им довольно удобно. Главное – не доводить ножи до такого стояния, когда править их уже будет невозможно. А для этого – тщательно осматривайте доски перед работой и удаляйте все гвозди. А вот еще один вариант наточки лезвий, теперь на станке :
Watch this video on YouTube
В этом случае угол заточки лезвия можно регулировать подъёмом и опусканием заточного круга.
Каково ваше мнение о ручном приспособлении для заточки лезвий? Если вы пользуетесь подобным или у вас есть усовершенствованная модель, напишите об этом в комментариях!
Угол заточки ножей для строгальных станков
Любому владельцу строгального оборудования приходилось сталкиваться с заточкой соответствующих ножей. Если в вашем распоряжении имеется специальный станок, то сделать это не составит никакого труда. Еще одним вариантом станет обращение в специализированную мастерскую. Также заточить подобные инструменты для резки можно и самостоятельно.
Почему необходима своевременная и правильная заточка?
Строгальные ножи, как и другие режущие инструменты, требуют ухода по определенным причинам:
тупым лезвием строгальных ножей древесина будет обрабатываться очень некачественно;
при работе с мягкими сортами древесины на поверхности будет образовываться ворс и разнообразные неровности;
стертая кромка будет крошиться;
при выполнении строгания тупыми инструментами возникает перегрузка двигателя станка
Если вы даже решите выполнить заточку самостоятельно, используя алмазные бруски, то эффект от такой работы будет совсем незначительный. Вам придется перетачивать их в ближайшее время. По этим причинам люди, занимающиеся строганием профессионально, выбирают только автоматическую или механическую заточку.
Подготовка рабочего места и оборудования, установка винта, контролирующего угол
Для заточки ножей вам понадобится специальное точило, но необходимо использовать современные его вариации с низкой оборотной скоростью, которые обладают охлаждением водяного типа. Более всего для этих целей подойдет Tormek T7 со специальным держателем Tormek SVH. Выполнить этот процесс качественно поможет ровный и чистый заточный камень. В дальнейшем, практический пример и будет рассматриваться на основе комплекта оборудования Tormek.
При заточке необходимо установить винт, которым вы сможете изменять угол заточки, но прежде нужно подготовить рабочее пространство, выполнив определенные условия:
Устанавливаем заточный камень Tormek SG250, выравнивая его при помощи специального приспособления Tormek TT-50. Приспособление идет в комплекте с T7.
Необходимо сгладить заточный камень, используя брусок для очистки и выравнивания.
Убираем стандартный упор и ставим специализированный упор.
Вкручиваем сам винт, которым в дальнейшем возможна регулировка угла наклона затачиваемого кресла.
Устанавливаем специальный держатель для лезвия.
Рекомендуется затачивать режущие инструменты, чья ширина больше 12 миллиметров. А длина ножа уже не имеет никакого значения. К тому же, вы сможете переставлять длинные ножи. Большое значение имеет правильная установка лезвия в держатель, потому что возможна заточка с большими перекосами. Правильно этот процесс выполняется следующим образом: устанавливаем спинку ножа до упора и зажимаем его специальными держателями.
Оценка и установка требуемого угла наклона
Проанализировав особенности оставляемых заточным камнем следов, возможно правильно выполнить оценку угла наклона, подобрав нужные пропорции. Затем на закрепленный упор устанавливается держатель с ножом. Регулировка осуществляется винтами упора, нужно опустить держатель до касания камнем. Винтами выставления угла выбираем требуемый его параметр в отношении камня. Выполняя вращение в ручном режиме, по рискам на окрашенном лезвии определяется необходимость регулировки угла наклона держателя. И если это потребуется, такую регулировку очень просто сделать.
Рабочий диапазон углов 30-45 градусов. Точный его градус определяется по конкретному сорту дерева. В справочнике от 1985 года, написанном Карлом Фрониусом, говорится, что качество будет зависеть не только от угла, но и от вылета ножа и диаметра головы. Классическим параметром принято считать 40 градусов. Выбирая конкретное число, не стоит забывать, что фрезы спроектированы по стандартной затыловке. Если вы увеличите угол, то появляется риск трения затылка о заготовку. А если уменьшите, то режущая кромка станет слабее и тоньше.
Решение проблемы с выбором нужного угла
Решить проблему установки требуемого угла наклона можно двумя способами:
Использование двухголовой затыловки по принципу двухслойных клинков. Главную затыловку делаем под углом 40 градусов, а саму вершину ножа – около 20 градусов. Тем самым вы значительно продлите срок службы, а также нож будет обладать хорошей устойчивостью к ударам.
Проверить схему и режимы заточки.
Таблица углов заточки различных видов ножей
Назначение ножа
Угол заточки в градусах
Филейные (филировочные) ножи
5-10
Для выполнения сапожного ремонта
30-40
Для выполнения столярных работ
30-45
Для нарезки твердых/плотных корнеплодов
22-25
Для нарезки хлебобулочных изделий
15-22
Для приготовления филе (отделения мяса от костей)
25-30
Для работы с овощами
35
Для работы с продуктами животного происхождения
30-45
Для разделки мяса
30
Для разделки рыбы
25
Для раскроя кожи
20-25
Для фруктов, бритвенные, скальпельные, кемпинг-ножи
10 15
Кухонный бытовой нож
30-35
Кухонный профессиональный нож
25-30
Ножницы для стрижки
45-55
Ножницы по металлу
75-85
Обвалочные, для крупной рыбы
20-25
Охотничий для ошкуривания
15-45
Охотничьи ножи
25-30
Перочинный нож
20-25
Поварской профессиональный (шеф-нож)
20-25
Разделочные, кливерс-ножи
15-20
Рубящий нож
45-60
Столовые ножи
55-60
Тесаки для мяса, крупные ножи для овощей
30-35
Топоры для разделки
40-45
Туристический, когда в приоритете острота лезвия
30-35
Туристический, когда нужна высокая износоустойчивость
40-45
Некоторые правила и особенности заточки
Установив угол наклона в нужную позицию, можно приступать к самому процессу заточки. Вы можете зафиксировать снимаемое количество металла, для этих целей предназначены два бегунка со шкалой и делением 0,1 мм. Специалист, выполняющий заточку, сможет регулировать этот параметр достаточно точно. Не стоит забывать после каждой подачи выполнять надежную фиксацию специальными зажимами, препятствующими появлению колебаний во время заточки.
Сам процесс заточки осуществляется благодаря изменению положения держателя в отношении заточного камня. Важно следить за тем, чтобы нож не попадал за крайнюю точку камня. Желательно останавливать держатель за 10 мм от края. В качестве тормозного элемента предусмотрены отдельные упоры, перемещением которых выставляется нужный ход. Тут решающим фактором станет опыт человека, который выполняет заточку строгальных ножей. Во время самого процесса образуется вода, которая накапливается и собирается на лезвие. Затем она стекает на сам корпус и на пол. Воды тратится очень много, поэтому не забывайте ее постоянно подливать в специальный отдел. А сам разлив можно уменьшить, подложив под ножку какую-либо подкладку, высотой 6 мм.
Еще одной неприятностью во время заточки станет постоянное засаливание точильного камня, что сказывается на продолжительности данной работы. Лучше всего периодически чистить его предусмотренным для этого бруском SP-650. При работе с мягким металлом, заточка пройдет гораздо быстрее и камень придется чистить реже, потому что такой материал снимается достаточно массивными участками.
После получасовой работы получается ровная фаска со стабильным заусенцем. Останется выполнить доводку, используя кожаный круг и пасту для полировки. В первую очередь потребуется довести до завершения плоскость ножа, а уже потом саму фаску.
Особенности работы с ручным станком
Станки ручного типа применяются лишь в тех случаях, когда нужно заточить не слишком большое количество ножей. В противном случае пришлось бы потратить очень много времени. Но если вам нужно наточить несколько ножей, то этот способ станет достаточно приемлемым, но необходимо придерживаться следующих правил:
нужно проверить поверхность камня, потому что использование подобных станков возможно только на чистых точильных инструментах;
старайтесь сделать так, чтобы каретка с закрепленным ножом подводилась достаточно гладко, без каких-либо резких толчков;
скорость движения каретки не должна превышать 6м/мин, большая скорость может повредить лезвие;
во время одного прохода каретка должна продвигаться на расстояние, которое больше длины ножа на 15 см.
Особенности работы с автоматическим станком
мокрый способ более подходит для заточки строгальных ножей, потому что осуществляется постоянное охлаждение лезвия;
на этапе подготовки уже нужно выставить все параметры, включая угол наклона и расстояние передвижения каретки;
важнейшим фактором является установка ножей на каретке;
процесс должен осуществляться достаточно плавно, без резких подергиваний
Точильный станок собственными руками
При желании, возможно собрать точильный станок самостоятельно. Вам понадобятся следующие предметы: стол, планшайба, пылесос, двигатель и кожух для станка. Планшайба станет основным и самым дорогим компонентом. Желательно выбрать американских или немецких производителей. Затем подбирается двигатель, мощность которого – 1,5 кВт, подойдут даже поддержанные варианты. Например, можно приобрести двигатели от стиральных машин.
Мотор нужно установить под столешницей, а планшайбу закрепить к движущемуся элементу. Не забудьте продумать кнопки включения и выключения. На планшайбу нужно поставить кожух, срезав одну сторону, с которой и будет выполняться заточка. Также в нижней части столешницы потребуется сделать вырез под пылесос. Данный станок также подойдет для работы с другими режущими поверхностями.
Заточка ножей в специализированных мастерских
Если вам не по силам организовать правильную заточку строгальных ножей или становится сложно установить нужный уровень наклона, то обращение в мастерскую станет отличным решением проблемы. Такой способ имеет следующий преимущества.
Используется дорогое и высококачественное оборудование. Прямолинейность режущей кромки будет выполнена гораздо лучше, чем при самостоятельной обработке.
Применяются современные системы охлаждения, которые не позволят перегреться и разрушиться режущей поверхности.
Применяются дополнительные материалы и специальные технологии по доводке ножа, что отражается на функциональных возможностях сроках службы таких ножей.
В условиях мастерской возможно получить максимально ровную кромку благодаря отсутствию перегревов и различий по весу. На практике, должен получиться идеальный инструмент.
Затачивание фуганковых ножей на месте
Описание: Отправлять фуганочные ножи на заточку неудобно, а результаты не всегда хороши. Кроме того, установка новых ножей в фуганке — трудоемкая и утомительная работа. Поэтому Хендрик Варью придумал способ затачивать фуганочные ножи, не снимая их с ножевого вала. Все, что вам нужно, это простое фиксирующее приспособление и его простые для понимания инструкции.
От Чистая деревообработка #224
Отправлять фуганочные ножи на заточку достаточно неудобно, но я тоже остался недоволен результатами. За эти годы я перепробовал полдюжины сервисов по заточке, и края редко были очень тонкими, а часто довольно грубыми. Кроме того, доводка новых ножей до совершенства — трудоемкая и утомительная задача, которую я бы предпочел потратить на работу по дереву. В течение многих лет я пытался разработать надежный способ получить действительно острые ножи, не снимая их с ножевого вала. Любой метод от руки не был достаточно точным. И тогда я придумал этот джиг. Он прост в изготовлении и может быть легко адаптирован к размерам вашей машины.
Заточка своими руками не заменяет полностью услугу заточки. Если на ваших ножах образовалась крупная стружка, лучше всего обратиться в службу заточки, которая выполнит тяжелую шлифовальную работу. Тем не менее, любитель, который аккуратно использует свои машины, должен использовать годы, прежде чем ему придется снимать ножи.
Чтобы гарантировать, что каждый из ножей затачивается под одним и тем же углом и остается на одной высоте, очень важно, чтобы режущая головка была зафиксирована в одном и том же положении, когда каждый нож затачивается. Это делает джиг.
Изготовление стопорного приспособления для фуганка
Деревянный корпус входит в отверстие в фальцующем уступе рядом с режущей головкой. Подгонка должна быть достаточно плотной, чтобы не было провисаний, но при этом легко сниматься.
Вставьте стопорный зажим. Когда машина отключена от сети, стол подачи полностью поднят, а один из ножей находится на вершине своей дуги, проверьте приспособление.
Опустите стол подачи на 1/8 дюйма.
Переместите стол. Это повернет нож вперед, так что он окажется примерно на 1/8 дюйма ниже деревянного бруска, представляющего точильный камень. Теперь вы можете заточить скос под углом, который не будет тереться о заготовку.
2. Заточите микрофаску
Ваша цель — снять ровно столько металла, чтобы избавиться от любых мелких зазубрин на ноже. Этот вторичный скос должен быть намного меньше основного скоса.
Защитить стол. Приклейте самоклеящийся пластиковый ламинат (leevalley.com) к началу разгрузочного стола. Это защитит его от точильных камней. Если вы просто слегка точите ножи, подойдет прозрачная упаковочная лента.
Установите глубину резания. Опускайте разгрузочный стол до тех пор, пока деревянный брусок (представляющий точильный камень) не коснется ножа. Полоска копировальной бумаги должна проскальзывать под дерево в начале разгрузочного стола.
Заточить нож. Поместите алмазный камень тонкой стороной (зернистость 600) на нож примерно на половину его длины на разгрузочном столе. Вы также можете использовать водные или масляные камни или наждачную бумагу для фанеры. Подтяните камень к разгрузочному столу, чтобы не образовался заусенец. Поднимите камень над ножом и повторите шаг.
Проверьте свой прогресс. Прежде чем переключиться на сторону камня с зернистостью 1200, используйте увеличительное стекло, чтобы проверить микрофаску. Ширина не обязательно должна быть одинаковой, но она должна проходить по всей длине ножа. Вы автоматически прекратите резку, когда кончик ножа перестанет выступать за стол разгрузки.
Подсказка: Заусенцев нет. Если вы будете двигать камень только справа налево, вы не получите заусенцев на плоской стороне ножа. Если вы пойдете слева направо и создадите крошечный заусенец, его легко удалить небольшим шлифовальным бруском.
Следующий нож. Не регулируя столы, снимите стопорное приспособление, поверните режущую головку в следующую прорезь и снова вставьте приспособление, чтобы зафиксировать второй нож в том же положении. Когда все ножи будут готовы, поднимите стол подачи, затем стол разгрузки, пока бекас не исчезнет.
Посмотрите видео о методе.
Для получения полной статьи загрузите PDF-файл ниже:
Просмотр PDF
Точилка для лезвий Veritas Jointer — Lee Valley Tools
Количество:
{{price.Quantity}}+ {{price.FormattedPrice}}
От:
$71,50 $71,50
Продано
{{itemExceptionMessage}}
Добавить в список желаний Добавить в список желаний {{ вариант. Отображаемое имя }} Создать новый список желаний
Товар добавлен в список желаний
Товар не может быть добавлен в данный момент
Выберите опцию, чтобы добавить товар в корзину.
Выберите параметр, чтобы просмотреть наличие товара.
Онлайн — {{состояние запасов}}
Это изображение не загружено. Чтобы распечатать изображения, закройте окно печати и прокрутите статью до конца. После загрузки всех изображений снова выберите параметр печати.
Приобретите нашу полную линейку инструментов Veritas
Описание
Для заточки лезвий с сильными зазубринами необходима профессиональная услуга по заточке или сложная домашняя шлифовальная машина. Точилка для фуганков Veritas предназначена для восстановления лезвий, затупившихся в результате обычного использования, даже если они имеют незначительные зазубрины.
Он зажимает лезвия шириной до 8 дюймов (включая лезвия для ручного рубанка) для заточки на абразивах с PSA-основой. Просто приложите абразив к плоской поверхности (листовое стекло подойдет), отрегулируйте подъемный винт, пока фаска не станет плоской на Абразив и используйте его так же, как и любую другую направляющую для заточки.После основной заточки переключитесь на тонкий абразив и отточите тонкую микрофаску.Двухпозиционные упоры гарантируют, что последующие лезвия затачиваются одинаково.Это одновременно просто и эффективно, позволяя вам быстро восстанавливать лезвия, которым вы, вероятно, дали бы стать намного более тусклыми перед отправкой в сервис.0005
Изготовлен из литого алюминия с фитингами из латуни и стали. Он поставляется с половиной листа (5 1/2 дюйма × 8 1/2 дюйма) 9-микронной (примерно 1200 зернистости) микроабразивной пленки 3M.
MPK, Inc. против Casarovea, USA, Inc. et al (2:22-cv-00738), Центральный окружной суд Калифорнии
MPK, Inc. против Casarovea, USA, Inc. et al (2:22-cv -00738), Центральный окружной суд Калифорнии
MPK, Inc. против Casarovea, USA, Inc. и др.
Центральный окружной суд Калифорнии
Судья:
Джон Ф. Уолтер
Направлено:
Патрисия Донахью
Дело №:
2:22-cv-00738
Характер иска
190 Контракт — Другой контракт
Причина
28:1332 Разнообразие — Нарушение контракта
90 005
Дело зарегистрировано:
02 февраля 2022 г.
Прекращено:
17 марта 2023 г.
Докет
Стороны (3)
Последнее проверено:
1 августа 2022 г. , 2:02 PDT
Ответчик
Казаровеа, США, Inc.
Представлен
Григорий Борис Гершуни
Юридическая фирма Гершуни
контактная информация
Истец
МПК, ООО
Представлен
Чарльз Р. Рондо
Юридическая фирма Рондо
контактная информация
ПРЕКРАЩЕННЫЕ СТОРОНЫ
Ответчик
Делает
Прекращено: 02.05.2022
Последнее обновление Docket: 11 часов назад
21
21
1 пгс
заказ Заказ
Пн 20.03 13:23
ПРИКАЗ, ПРЕДОСТАВЛЯЮЩИЙ СОВМЕСТНОЕ ПРЕДОСТАВЛЕНИЕ ИСКА ДЛЯ ОТКЛОНЕНИЯ ИСКА С ПРЕДУБЕЖДЕНИЕМ судьей Джоном Ф. Уолтером. На основании Совместного соглашения об отклонении иска с предубеждением от 10 января 2023 г. настоящим приказываю отклонить иск с предубеждением. (4)
20
20
стричь Закрыть дело
Пт 17.03 16:34
Совместное ПРЕДЛОЖЕНИЕ об прекращении дела в соответствии с Федеральным правилом гражданского судопроизводства 41(a)(1)(A)(ii), поданное истцом MPK, Inc. (Рондо, Чарльз)
Атт: 1
Предлагаемый порядок
19
19
заказ Закрытие дела
Пт 17.03 10:04
МИНУТНЫЙ (В КАМЕРАХ) ПОРЯДОК ОТКЛОНЕНИЯ ДЕЙСТВИЯ БЕЗ ПРЕДУПРЕЖДЕНИЯ ЗА НЕИСПОЛНЕНИЕ ПРИКАЗА СУДА судьей Джоном Ф. Уолтером. В связи с нарушением сторонами Постановления Суда иск ОТКЛОНЯЕТСЯ без ущерба. Предварительная конференция, запланированная на 31 марта 2023 г., Судебное разбирательство, запланированное на 18 апреля 2023 г. , и любые другие даты, предусмотренные в календаре по этому вопросу, настоящим ОТМЕНЯЮТСЯ. Дело прекращено. Сделал ИС-6. (4)
18
18
заказ Предварительный судебный приказ о назначении — только форма
Вт 03.05 15:53
ПРИКАЗ РАСПИСАНИЯ И ВЕДЕНИЯ ДЕЛА, вынесенный судьей Джоном Ф. Уолтером. Целью настоящего Приказа является уведомление сторон и их адвокатов о сроках и графике, которые будут регулировать это действие. Предварительная конференция назначена на 31.03.2023 в 8:00. Слушание по движениям в Limine; Оспариваемые инструкции присяжных назначены на 07.04.2023 в 8:00. Суд присяжных назначен на 18.04.2023 в 8:30. ПОДРОБНОСТИ СМОТРИТЕ ЗАКАЗ. (4)
17
17
заказ Приказ/Направление к ADR (№ 3) (частный посредник) (ADR-12) ~ До — Добавление и прекращение сторон ~ До — Прекращение слушаний
Вт 03.05 15:47
ПРИКАЗ ОТМЕНЯЕТ КОНФЕРЕНЦИЮ ПО ПЛАНИРОВАНИЮ, ОБРАЩАЕТСЯ К ЧАСТНОМУ ПОСРЕДНИЧЕСТВУ И УВОЛЯЕТ ЛЮБЫХ НЕОБСЛУЖИВАЕМЫХ ОТВЕТЧИКОВ DOE судьей Джоном Ф. Уолтером. Суд рассмотрел Совместный отчет сторон по правилу 26(f) и пришел к выводу, что Конференция по расписанию не является необходимой. Слушание 16 мая 2022 г. вакантно и вычеркнуто из календаря. Будет издан приказ о планировании и ведении дел. В настоящее время любые неотбытые ответчики Министерства энергетики увольняются. Суд, рассмотрев Запрос сторон: Выбор процедуры АРС, Уведомление Сторон о программе АРС, управляемой судом, или отчет, представленный сторонами в соответствии с ФРС. Р. Гражданский. P. 26(f) и Civil L.R. 26-1, настоящим: ПРИКАЗЫ, на которые ссылается данное дело: ПРОЦЕДУРА ДОПОГ №. 3: (Частное посредничество). Процедура ADR должна быть завершена не позднее: 5 декабря 2022 г. Совместный отчет о результатах конференции по урегулированию должен быть представлен: 9 декабря, 2022. (iv)
16
16
разное Совместный отчет Правило 26(f) План обнаружения
Пт 29.04 18:53
СОВМЕСТНЫЙ ОТЧЕТ Правило 26(f) План раскрытия информации; предполагаемая продолжительность судебного разбирательства 5–7, поданного истцом MPK, Inc. .. (Рондо, Чарльз)
15
15
заказ Первоначальная настройка заказа R26 Конференция по расписанию — только форма
Чт 07.04 9:45
ПРОТОКОЛ (В КАМЕРАХ) СУДЕБНЫЙ ПРИКАЗ судьи Джона Ф. Уолтера. Адвокаты настоящим уведомлены о том, что конференция по расписанию назначена на 16 мая 2022 года в 13:15. перед судьей Джоном Ф. Уолтером в зале суда 7A, 350 W. 1st St, Лос-Анджелес, Калифорния
. Главный адвокат должен присутствовать на всех разбирательствах в этом Суде, включая Конференцию по расписанию. Адвокатам предписано своевременно соблюдать правило 26 Федеральных правил гражданского судопроизводства и местное правило 26-1 и подать совместный отчет не позднее 2 мая 2022 года. (iv)
14
14
уведомление Сертификат/уведомление заинтересованных сторон
Пн 04/04 18:21
СЕРТИФИКАТ заинтересованных сторон, поданный ответчиком Casarovea, USA, Inc. , в котором указывается итальянская корпорация Parotex Sri. (Гершуни, Грегори)
13
13
уведомление Недостаток в электронных документах (G-112A) — необязательная HTML-форма
Пн 04.04 11:30
УВЕДОМЛЕНИЕ ДЛЯ ЗАПИСЧИКОВ О НЕДОСТАТКАХ в документах, поданных в электронном виде RE: Ответ на жалобу . Были обнаружены следующие ошибки: Местное правило 7.1-1 Отсутствие уведомлений заинтересованных сторон и/или отсутствие копий. Адвокат должен соблюдать L.R 7.1-1. В ответ на это уведомление Суд может: (1) распорядиться о подаче измененного или исправленного документа; (2) заказать изъятие документа; или (3) предпринять другие действия, которые Суд сочтет целесообразными. (4)
12
12
отвечать Ответ на жалобу (Открытие гражданского дела адвокатом)
Сб 02/04 13:58
ОТВЕТ на жалобу (Открытие гражданского дела прокурором) с ТРЕБОВАНИЕМ ПРИСЯЖНЫХ, поданное ответчиком Casarovea, USA, Inc.
11
11
разное Декларация
Пн, 07 февраля, 18:05
ЗАЯВЛЕНИЕ Чарльза Р. Рондо в качестве ведущего судебного адвоката, поданное истцом MPK, Inc. (Рондо, Чарльз)
10
10
заказ Первоначальный приказ при подаче жалобы — только форма
Чт 03.02 16:49
ПОСТОЯННЫЙ ПОРЯДОК судьи Джона Ф. Уолтера. ВНИМАТЕЛЬНО ПРОЧИТАЙТЕ ЭТО ЗАКАЗ. ОН УПРАВЛЯЕТ ДЕЛОМ И В НЕКОТОРЫХ ОТНОШЕНИЯХ ОТЛИЧАЕТСЯ ОТ МЕСТНЫХ ПРАВИЛ. Это действие было отнесено к календарю судьи Джона Ф. Уолтера. (4)
8
8
услуга Повестка выдана (Открытие гражданского дела адвокатом)
Чт 03.02 13:55
21-ДНЕВНАЯ повестка, выданная по жалобе (открытие гражданского дела адвокатом) в отношении ответчика Casarovea, USA, Inc. (и др.)
7
7
уведомление Уведомление для адвоката о согласии на судебное разбирательство перед мировым судьей США – необязательная HTML-форма
Чт 03. 02 13:53
Уведомление адвоката о повторном согласии на рассмотрение дела мировым судьей США. (эт)
6
6
адр Уведомление для сторон программы ADR, управляемой судом (ADR-8) – необязательная HTML-форма
Чт 03.02 13:52
УВЕДОМЛЕНИЕ ДЛЯ СТОРОН ПРОГРАММЫ ADR, УПРАВЛЯЕМОЙ СУДОМ, подано. (эт)
5
5
уведомление Уведомление о назначении судьям США (CV-18) – необязательная HTML-форма
Чт 03.02 13:52
УВЕДОМЛЕНИЕ О НАЗНАЧЕНИИ окружному судье Джону Ф. Уолтеру и мировому судье Патриции Донахью. (эт)
только текст Только текстовое уведомление о расписании
Чт 03.02 15:33
ТОЛЬКО ТЕКСТОВЫЕ ПРИКАЗ ОТМЕНА УЧАСТИЯ: В соответствии с Местным правилом 19-1, не допускается подача жалобы или петиции, в которых участвует более десяти Doe или сторон с вымышленными именами. Соответственно, Суд настоящим отклоняет иск в отношении ответчиков Доу с 11 по 25 включительно. С ЭТОЙ ЗАПИСЬЮ НЕТ ДОКУМЕНТА в формате PDF. (ср)
4
4
уведомление Сертификат/уведомление заинтересованных сторон
Ср 02/02 12:02
УВЕДОМЛЕНИЕ о заинтересованных сторонах, поданное истцом MPK, Inc. (Рондо, Чарльз)
3
3
уведомление Запрос вызова
Ср 02/02 12:00
Запрос клерка о выдаче повестки по жалобе (открытие гражданского дела адвокатом), поданной истцом MPK, Inc. (Рондо, Чарльз)
2
2
разное Гражданский титульный лист (CV-71)
Ср 02/02 11:57
ГРАЖДАНСКАЯ ОБЛОЖКА, поданная истцом MPK, Inc. (Рондо, Чарльз)
1
1
cmp Жалоба (Открытие гражданского дела адвокатом)
Ср 02/02 11:55
ЖАЛОБА Квитанция №: ACACDC-32725556 — Плата: 402 доллара США, поданная истцом MPK, Inc. (Адвокат Чарльз Р. Рондо добавлен к стороне MPK, Inc.(pty:pla))(Рондо, Чарльз)
Продолжить создание учетной записи
MUSWAY MPK-QSC25-O — 20-контактный открытый жгут для Quadlock 2,5 м
MUSWAY MPK-QSC25-O — 20-контактный открытый жгут для Quadlock 2,5 м
перейти к содержанию
Нажмите на изображение, чтобы увеличить
Описание:
Кабель-переходник для разъемов динамиков Quadlock
на открытых концах кабеля для вторичного усилителя (длина 2,5 м)
Отзывы
Apple PayGenericGoogle PayMastercardPayPalUnion PayVisa
Ваша платежная информация надежно обрабатывается. Мы не храним данные кредитной карты и не имеем доступа к информации о вашей кредитной карте.
Страна
Австралия—АфганистанАландские островаАлбанияАлжирАндорраАнголаАнгильяАнтигуа и БарбудаАргентинаАрменияАрубаОстров Вознесения АвстралияАвстрияАзербайджанБагамыБахрейнБангладешБарбадосБеларусьБельгияБелизБенинБермудыБутанБоливияБосния и ее страны зеговинаБотсванаБразилияБританская территория в Индийском океанеБританские Виргинские островаБрунейБолгарияБуркина-ФасоБурундиКамерунКанадаКабо-ВердеКарибы НидерландыКаймановы островаЦентральноафриканская РеспубликаЧадЧилиКитайОстров РождестваКокосовые острова (Килинг)КолумбияКоморские островаКонго-БраззавильКонго-КиншасаОстрова КукаКоста-РикаХорватияКюрасаоКипр СШАЧехияКот-д’ИвуарДанияДжибутиДоминикаДоминиканская РеспубликаЭквадорЕгипетСальвадорЭкваториальная ГвинеяЭритреяЭстонияЭсватиниЭфиопияФолклендские островаФарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибралтарГрецияГренландияГренадаГу adeloupeГватемалаГернсиГвинеяГвинея -БисауГайанаГаитиГондурасГонконг САРВенгрияИсландияИндияИндонезияИракИрландияОстров МэнИзраильИталияЯмайкаЯпонияДжерсиИорданияКазахстанКенияКирибатиКосовоКувейтКыргызстанЛаосЛатвияЛиванЛесотоЛиберияЛивияЛихтенштейнЛитваЛюксембургМакао ЮАРМадагаскар МалавиМалайзияМальдивыМалиМальтаМартиникаМавританияМаврикийМайоттаМексикаМолдоваМонакоМонголияЧерногорияМонсерратМароккоМозамбикМьянма (Бирма)НамибияНауруНепалНидерландыНовая КаледонияНовая ЗеландияНикарагуаНигерНигерияНиуэ Остров НорфолкСеверная МакедонияНорвегияОманПакистанПалестинские территорииПана maПапуа-Новая ГвинеяПарагвайПеруФилиппиныПиткэрнПольшаПортугалияКатарРеюньонРумынияРоссияРуандаСамоаСан-МариноСан-Томе и ПринсипиСаудовская АравияСенегалСербияСейшельские островаСьерра-ЛеонеСингапурСинт-МартенСловакияСловенияСоломоновы островаСомалиЮжная АфрикаЮжная Джорджия и Южные Сандвичевы островаЮжная КореяЮжный СуданСпа на Шри-ЛанкеSt. Бартелеми Св. ЕленаСв. Китс и НевисСент. Люсия Св. МартинСт. Пьер и МикелонСв. Винсент и ГренадиныСуданСуринамШпицберген и Ян-МайенШвецияШвейцарияТайваньТаджикистанТанзанияТаиландТимор-ЛештиТогоТокелауТонгаТринидад и ТобагоТристан-да-КуньяТунисТурцияТуркменистанОстрова Теркс и КайкосТувалуСША. Отдаленные островаУгандаУкраинаОбъединенные Арабские ЭмиратыВеликобританияСоединенные ШтатыУругвайУзбекистанВануатуВатиканВенесуэлаВьетнамУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабве
Почтовый индекс
У нас есть 14-дневная политика возврата, что означает, что у вас есть 14 дней после получения товара, чтобы запросить возврат.
Чтобы иметь право на возврат, ваш товар должен быть в том же состоянии, в котором вы его получили, неношеным или неиспользованным, с бирками и в оригинальной упаковке. Вам также понадобится чек или подтверждение покупки.
Чтобы начать возврат, вы можете связаться с нами по адресу [email protected]. Если ваш возврат будет принят, мы вышлем вам инструкции о том, как и куда отправить вашу посылку. Товары, отправленные обратно к нам без предварительного запроса на возврат, не будут приняты.
Вы всегда можете связаться с нами по любым вопросам возврата по адресу [email protected].
Повреждения и проблемы Пожалуйста, проверьте свой заказ при получении и немедленно свяжитесь с нами, если товар неисправен, поврежден или если вы получили не тот товар, чтобы мы могли оценить проблему и исправить ее.
Обмен Самый быстрый способ убедиться, что вы получите то, что хотите, — это вернуть товар, который у вас есть, и после того, как возврат будет принят, совершить отдельную покупку нового товара.
Возврат Мы сообщим вам, как только получим и проверим ваш возврат, и сообщим, был ли одобрен возврат или нет. В случае одобрения вам будет автоматически возвращен ваш первоначальный способ оплаты. Пожалуйста, помните, что вашему банку или компании-эмитенту кредитной карты может потребоваться некоторое время для обработки и отправки возврата.
ОТКАЗ ОТ ГАРАНТИИ
Приобретение продуктов и/или услуг у SOUNDTECH:
Наши товары и услуги предоставляются с гарантиями, которые не могут быть исключены в соответствии с Законом Австралии о защите прав потребителей. Вы имеете право на замену или возмещение в случае крупного отказа и компенсацию за любые другие разумно предсказуемые убытки или ущерб. Вы также имеете право на ремонт или замену товара, если товар не имеет приемлемого качества и неисправность не является серьезной.
Гарантия SOUNDTECH Pty Ltd является дополнением к правам и средствам правовой защиты, установленным федеральным законодательством Австралии и законодательством штата, и никоим образом не должна толковаться как исключающая, ограничивающая или изменяющая какое-либо федеральное законодательство или законодательство штата.
На что распространяется эта ограниченная гарантия?
Настоящая Ограниченная гарантия распространяется на физические товары и только на физические товары, приобретенные или установленные SOUNDTECH. Настоящая Ограниченная гарантия распространяется на любые дефекты материалов или изготовления при нормальном использовании в течение гарантийного срока.
Кто застрахован?
Настоящая гарантия предоставляется только первоначальному покупателю и не может быть передана последующим покупателям.
Как долго действует покрытие?
Гарантийный срок на физические товары, приобретенные у SOUNDTECH, составляет 12 месяцев с даты покупки.
Гарантийный срок замены Физического Товара или Детали составляет 12 месяцев с даты замены или ремонта.
SOUNDTECH Обязанности.
В течение Гарантийного периода компания SOUNDTECH бесплатно отремонтирует или заменит изделия или их части новыми или отремонтированными деталями, которые оказались дефектными из-за неподходящего материала или изготовления при нормальном использовании и обслуживании.
Как получить гарантийное обслуживание?
Если у вас возникнут проблемы, в первую очередь следует обращаться в службу поддержки клиентов SOUNDTECH.
Вы должны предоставить подробное описание проблемы и список связанных компонентов, установленных в вашем автомобиле.
Если продукт установлен не компанией SOUNDTECH, вы должны предоставить соответствующее подтверждение покупки продукта. Это включает в себя копию оригинального счета с указанием даты покупки, модели и серийного номера (если применимо) и копию квитанции о профессиональной установке лицензированным / признанным установщиком автомобильной аудиосистемы
Вы несете ответственность за доставку продукта/автомобиля в SOUNDTECH .
Что не покрывается?
Настоящая ограниченная гарантия не распространяется на следующее:
Ответственность за ущерб, возникший во время доставки клиенту, несет перевозчик.
Повреждение, вызванное несчастным случаем, злоупотреблением, небрежностью, неправильным использованием, неправильным подключением, неправильной эксплуатацией, прямым воздействием воды или несоблюдением инструкций, содержащихся в руководстве пользователя.
Лазерный станок используют не только для сквозной резки разнообразных материалов, но и для нанесения изображений на их поверхность. Такой метод обработки считается оптимальным в сравнении с ручным или фрезерованием. Причин тому несколько:
максимально высокая скорость прохождения и точность позиционирования луча;
детализированное воспроизведение фотографий, изображений, надписей и орнаментов любой сложности;
четкий контур и отсутствие повреждений поверхности в зоне прохождения лазера;
широкий ассортимент материалов, подходящих для работы;
долговечность и полная невосприимчивость к любому виду внешних воздействий.
Используя лазерный гравер можно декорировать практически любые изделия: портсигары, часы, ювелирные украшения, визитки, канцтовары, награды, сувениры, подарки и многое другое. Информацию о том, какой станок выбрать под ваши задачи читайте в нашей статьей «Какой лазерный гравер выбрать». Для того, чтобы полученное изображение было качественным и точным, необходимо правильно подготовить его и настроить устройство в соответствии с материалом для обработки.
Как и все оборудование с автоматическим управлением, гравер действует по программе, заложенной в компьютер. Грамотно составленный макет является одной из составляющих безупречного конечного результата. Прежде чем отправлять файл в работу следует убедиться, что все контуры замкнуты, белые и прозрачные линии отсутствуют, а остальные не накладываются друг на друга. В макете также должна быть указана точка начала обработки, прописана последовательность хода луча и глубина его проникновения в материал.
Правильно подобранная мощность тоже играет большую роль при работе с гравером. В целом, для выполнения подобной операции вполне достаточно лазерной трубки на 40 Вт. Такой излучатель качественно и быстро будет наносить изображения на фанеры, пластики и металлы (о специфике работы с металлическими поверхностями будет упомянуто ниже). Рекомендуемая мощность при гравировке таких материалов составляет 60-80% от номинала (для натуральной древесины этот параметр можно поднять до 100%). Скорость перемещения лазерной головки при этом может быть близка к максимальной. При работе с менее плотными поверхностями, например, бумагой, картоном или фетровой тканью, мощность следует уменьшить до 10-50% (подбирать экспериментальным путем), чтобы избежать прогорания краев.
Еще одним важным фактором является фокусное расстояние между линзой и поверхностью. От него зависит диаметр светового пятна и глубина проникновения луча в материал с сохранением качественного реза. Чем больше фокусное расстояние, тем больше будет размер лазерной точки, поэтому большой фокус используют для нанесения надписей и изображений с низкими требованиями к детализации или при работе с толстыми материалами. Высокоточная гравировка с большим количеством мелких элементов с четким контуром требует минимального фокусного расстояния. Например, для лазерного воспроизведения фотографий или мелкого шрифта используют преимущественно линзу на 1,5 дюйма, что означает, что интервал между ней и поверхностью будет 3,81 см. Двухдюймовая линза позволяет получить хорошие, четкие изображения со средним требованием к детализации и минимальным количеством сложноконтурных или мелких участков. Линза 2,5 дюйма ставится в тех случаях, когда разрешение исходного изображения низкое и требования к детализации минимальные.
Особое внимание следует уделить состоянию всех компонентов лазерной оптики. И сама фокусировочная линза и все три зеркала должны иметь абсолютно чистую поверхность, без пыли, признаков копоти и отпечатков пальцев, так как все это влияет на концентрацию мощности луча и параметры светового пятна (равномерность, ровные края, правильный контур).
Качество материала и поверхности является последним пунктом инструкции по выполнению лазерной гравировки. Любые неровности на материале и изделии, которое планируется использовать для декорирования, приведут к изменению фокусного расстояния и, как следствие, к искажению изображения, поэтому поверхность следует зачистить предварительно (с целью выравнивания), после чего хорошо протереть. Что касается качества материала, то, в первую очередь, этот акцент касается фанеры, для которой очень важна сортность. Чем ниже сорт, тем больше в ней сучков, затрудняющих прохождения луча вглубь и нарушающих целостность восприятия гравировки, поэтому для гравировки рекомендуется использовать только фанеру высшего класса.
Рекомендации по работе с некоторыми материалами
Методом нанесения гравировальных изображений украшают подарки, сувениры, холодное и стрелковое оружие, предметы интерьерного дизайна, визитки, открытки, награды, памятные таблички, кожгалантерею и еще очень много изделий. Не менее обширен и список материалов, которые может гравировать лазерный станок ЧПУ. Сюда входит кожа, акрил и прочие пластики, натуральная древесина и фанера, картон и плотная бумага, некоторые ткани, резина, металлы и даже пенопласт.
Большинство материалов гравируются легко и не требуют никаких подготовительных мероприятий. Единственным уточнением может служить необходимость в усиленном обдуве при работе с кожей и древесным или пластиковым сырьем — это способствует лучшему отводу продуктов горения и препятствует излишнему затемнению краев.
Отдельных рекомендаций заслуживают следующие материалы:
многослойные пластики гравируются линзами 2 или 2,5 дюйма на невысокой мощности и только после удаления защитной пленки. Чтобы определить подходящее значение, необходимо повышать мощность до тех пор, пока верхний слой не выгорит до базового, после чего добавить еще несколько процентов и начать работу. По завершении работы в обязательном порядке следует протереть всю оптику от нагара;
камень лазерный луч обрабатывает неохотно, поэтому в большинстве случаев для получения качественного изображения требуется повторное прохождение всего маршрута. Предпочтительно использовать двухдюймовую линзу;
стекло является очень чувствительным к перегреву материалом, поэтому при работе с ним следует избегать высокой мощности и низкой скорости. Для достижения максимального качества изображения и уменьшения теплового воздействия желательно предварительно покрыть поверхность стекла смоченной газетой (следить, чтобы во время гравировки она не высыхала) или обработать ее пятидесятипроцентным мыльным раствором;
металлы являются самой сложной и капризной основой для гравировки. Без предварительной обработки такого материала нет смысла даже пытаться запускать станок (следует уточнить, что речь идет о CO2 граверах, а не об оптоволоконных лазерах, которые как раз и предназначены для работы с металлами). Для того, чтобы луч лазера не отражался от поверхности, ее необходимо покрыть специальным спреем или пастой, которую наносят кисточкой. Следует учитывать, что качество гравировки во многом зависит от толщины и равномерности слоя нанесенной эмульсии, поэтому нужно стараться покрыть металл очень тонким слоем, избегая при этом наплывов. Сама паста имеет довольно вязкую, густую консистенцию и может расслаиваться, поэтому перед использованием необходимо тщательно перемешать ее до полной однородности (допускается разбавление небольшим количеством спирта). После высыхания присадки можно приступать к гравировке. Общей рекомендацией для всех металлов является обработка на высокой скорости, но малой мощности (максимум 40 Вт).
Важно: если же на поверхность листа или изделия нанесен слой защитного лака, то его гравировка невозможна даже при условии использования пасты.
Свежее:
Как выбрать лазерный гравировальный станок?
Лазерный маркиратор: как он работает и что может делать?
Можно ли лазером разрезать дерево?
Сферы применения лазерных станков с ЧПУ
Лазерный сварочный аппарат
Популярное:
Что такое чиллер для лазерного станка с ЧПУ?
Диагностика и ремонт блока питания лазерного станка с ЧПУ
Особенности лазерной резки пенокартона
Как выбрать лазерный станок
Способы качественного раскроя ткани на лазерном станке с ЧПУ
Побывали в гостях на производстве предприятия «АЛЬТАИР», которое успешно занимается производством деревянных игрушек и сувенирной продукции.
Видео с производства компании Пластфактория — наш уже постоянный клиент, который занимается POS-материалами и работает с крупными косметическими брендами.
Популярные категории товаров
Лазерные станки по фанере Газовый маркер Волоконный маркер Лазерные станки по дереву Лазерные станки Zerder Лазерный маркиратор Лазерные станки по металлу Лазерные станки Rabbit Лазерные станки для гравировки Лазерные станки WATTSAN
Индивидуальный запрос
Имя
Телефон
Отправляя контактные данные — вы даете согласие на их обработку в целях оказания услуг
Оцените информацию на странице
Средняя оценка: 3,5 Голосов: 11
Как гравировать на лазерном CO2 станке с ЧПУ
Чаще всего лазерное оборудование используется для сквозной резки листовых материалов. Но все больше пользователей интересуется, как гравировать на лазерном станке. В ходе работы регулируется длина лазерного луча, благодаря чему можно выполнять рисунки в формате 3D или 4D.
Техника гравировки довольно проста, но если вы не знаете, как это сделать, сотрудники компании «LASER-Technology» расскажут, как правильно гравировать на лазерном оборудовании.
Преимущества лазерного фрезера
Гравировка на лазерном станке становится более популярной. Технология такой обработки позволяет качественно обрабатывать материалы различной текстуры. Гравировка на подобном оборудовании имеет такие преимущества:
Высокая скорость выполнения задач с максимальной точностью.
Выполнение рисунка или перенесение фотографии с детализированным воспроизведением.
Четкость контура и высокое качество кромки без механических повреждений.
Возможность обрабатывать материалы различного качества и прочности.
Не требуется замена режущего инструмента.
Устойчивость луча к внешнему воздействию.
Порядок выполнения работы
Лазерное оборудование позволяет обрабатывать различные листовые материалы и уже готовые изделия. О том, как гравировать гравером, можно узнать из инструкции к аппарату, но компания «LASER-Technology» советует придерживаться таких правил:
Изготовление макета. От качества этого эскиза зависит ход работы. На правильном макете указана начальная точка, направление движения лазера и глубина его проникновения в материал.
Выбор мощности. Как правило, для лазерной гравировки мастера выбирают лазерную трубку мощностью 40 Вт. В зависимости от прочности обрабатываемого материала мощность может использоваться не полностью. Например, чтобы избежать обгорания заготовки из бумаги, картона или фетровой ткани, используется только 10 — 50% мощности лазерной трубки.
Выбор фокусного расстояния от линзы до заготовки. От этого параметра зависит диаметр светового пятна и глубина реза. Чем оно меньше, тем точнее получается изображение. С увеличением фокусного расстояния увеличивается и световое пятно. Для более точной детализации изображения мастера используют линзу с диаметром 1,5 дюйма, для крупных рисунков без высоких требований к точности можно взять 2,5 дюйма.
Очистка всех компонентов лазерной оптики. Для правильного функционирования оборудования перед началом работы проверяйте чистоту фокусировочной линзы и трех зеркал. Во время работы станка на этих деталях может оседать пыль и нагар, которые пагубно влияют на качество реза. При очистке деталей следите, чтобы на них не оставались отпечатки пальцев.
Выбор качества материала. Обрабатываемое сырье не должно содержать малейших неровностей. Такие изъяны приводят к искажению изображения, поскольку при прохождении через эти участки меняется фокусное расстояние. Чтобы избежать таких неприятностей, мастера полируют заготовку. Поскольку фанера часто имеет много сучков, то для гравировки принято выбирать материал высшего качества.
Если вы не знаете, как гравировать на ЧПУ станке, воспользуйтесь консультацией специалистов, которые имеют опыт в таких работах.
СМОТРИТЕ ТАКЖЕ: Производство лазерных CO2 станков • Лазерные ЧПУ станки Cutter • Техническое обслуживание станков • Как выбрать лазерный станок?
Гравировка Определение и значение — Merriam-Webster
выгравировать
in-grāv
en-
переходный глагол
1
а
: вдавить глубоко, как гравером
инцидент был выгравирован в его памяти
б
: для формирования путем надреза (как на дереве или металле)
2
а
: для вырезания фигур, букв или рисунков для печати
также
: для печати с гравированной пластины
гравировка приглашение
б
: фотогравировка
гравер сущ.
Синонимы
etch
могила
надрез
вписать
insculp [ архаичный ]
Просмотреть все синонимы и антонимы в тезаурусе
Примеры предложений
они будут выгравируйте свои инициалы на кольце бесплатно.
У нее было кольцо с гравировкой с ее инициалами.
Изображение было выгравировано на табличке .
Недавние примеры в Интернете
Между началом обеда и крещением угла, в 1955 августа Огаста Нэшнл начала вручать победителям серебряные портсигары с гравировкой с автографами игроков.
— Алан Блиндер Дуг Миллс, New York Times , 8 апреля 2023 г.
По словам президента Академии кинематографических искусств и наук, имя Уилла Смита будет выгравировано на на его «Оскаре» за лучшую мужскую роль.
— Джен Джуно, Peoplemag , 13 марта 2023 г.
Для тех, кто плохо знаком с катком, это было в конце 1990-х, когда стареющая икона в свитере № 77 пять раз выгравировала свое имя на Norris Trophy и испытывала надоедливое желание выиграть Кубок Стэнли.
— Кевин Пол Дюпон, BostonGlobe.com , 7 марта 2023 г.
На ярлыке выгравировано с обоими вашими инициалами для романтического подарка, который достаточно тонкий, чтобы носить его часто.
— Келси Стигман, 9 лет.0017 Seventeen , 4 апреля 2023 г.
Брюс Консепсьон, Джереми Маринас, Дэйв Камарильо и Ли Цян получили часы в подарок от Ривза, и внутри каждых часов был выгравирован номер с личными посланиями актера каждому человеку.
— Томми Маккардл, Peoplemag , 30 марта 2023 г.
Бейсбол был выгравирован в детстве очень многих американцев, и этот вид спорта может помочь вызвать воспоминания, ключевой элемент ухода, который клиенты получают в Glenner Town Square.
— Лорен Дж. Мапп, 9 лет.0017 Сан-Диего Юнион-Трибьюн , 28 марта 2023 г.
Некоторые из золотых лепестков имеют гравировку и сатинированные.
— Джастин Феннер, Robb Report , 27 марта 2023 г.
В здании Капитолия штата Арканзас уже установлены два примечательных памятника, в том числе один, посвященный девятке из Литл-Рока, первым чернокожим ученикам, отказавшимся от сегрегации в Центральной средней школе Литл-Рока в 1919 году.57 и плита с гравировкой с Десятью Заповедями.
— Джулия Маллек, Кварц , 20 марта 2023 г.
Узнать больше
Эти примеры программно скомпилированы из различных онлайн-источников, чтобы проиллюстрировать текущее использование слова «гравировать». Любые мнения, выраженные в примерах, не отражают точку зрения Merriam-Webster или ее редакторов. Отправьте нам отзыв об этих примерах.
История слов
Этимология
Среднефранцузский гравёр , от эн- + гравёр до гравёра, германского происхождения; сродни древнеанглийскому grafan tograve
Первое известное использование
1509, в значении, определенном в смысле 1a
Путешественник во времени
Первое известное использование выгравировать было в 1509 г.
Посмотреть другие слова того же года Энграулиды
гравировать
гравированное стекло
Посмотреть другие записи поблизости
Процитировать эту запись «Гравировать».
Словарь Merriam-Webster.com , Merriam-Webster, https://www.merriam-webster.com/dictionary/engrave. По состоянию на 25 апреля 2023 г.
Копировать цитирование
Детское определение
выгравировать
глагол
выгравировать
в-грав
1
: чтобы произвести глубокое впечатление
инцидент был выгравирован в моей памяти
2
а
: для вырезания или вырезания (в виде букв или рисунков) на твердой поверхности
б
: для вырезания линий, букв, фигур или рисунков на (твердой поверхности) или в них, часто для использования в печати
с
: для печати с вырезанной поверхности
гравировка приглашение на свадьбу
гравировка существительное
Еще от Merriam-Webster о
engrave
Нглиш: Перевод engrave для говорящих на испанском языке
Britannica English: Перевод engrave для говорящих на арабском языке
Последнее обновление:
— Обновлены примеры предложений
Подпишитесь на крупнейший словарь Америки и получите тысячи дополнительных определений и расширенный поиск без рекламы!
Merriam-Webster без сокращений
Можете ли вы решить 4 слова сразу?
Можете ли вы решить 4 слова сразу?
орфография
См. Определения и примеры »
Получайте ежедневно по электронной почте Слово дня!
Гравировка Определение и значение | Dictionary.com
Основные определения
Викторина
Связанный контент
Примеры
Британский
Показывает уровень сложности слова.
[ан-серый]
/ ɛnˈgreɪv /
Сохрани это слово!
См. синонимы для: выгравировать / выгравировать / выгравировать / выгравировать на Thesaurus.com
Показывает уровень сложности слова.
глагол (используется с объектом), гравировка, гравировка.
для чеканки (букв, рисунков и т. д.) на твердой поверхности, например, на металле, камне или торце дерева: она попросила ювелира выгравировать свое имя на задней крышке часов.
для печати с такой поверхности.
для обозначения или украшения вырезанными буквами, рисунками и т. д.: он выгравировал на кольце цветочный узор.
произвести глубокое впечатление; инфикс: Этот образ выгравирован в моей памяти.
ВИКТОРИНА
МОЖЕТЕ ЛИ ВЫ ОТВЕЧАТЬ НА ЭТИ ОБЫЧНЫЕ ГРАММАТИЧЕСКИЕ СПОРЫ?
Есть грамматические дебаты, которые никогда не умирают; и те, которые выделены в вопросах этой викторины, наверняка снова всех разозлят. Знаете ли вы, как отвечать на вопросы, которые вызывают самые ожесточенные споры по грамматике?
Вопрос 1 из 7
Какое предложение верно?
Происхождение гравировки
1500–10; <Среднефранцузский гравер; см. гравировка 1 , могила 3
ДРУГИЕ СЛОВА ОТ выгравировать
гравировка, прилагательное, гравировка, существительное, гравировка, глагол (используется с объектом) , заново выгравировать, перегравировать.супергравировать, глагол (используется с объектом), супергравировать, супергравировать.
Послушать статьюВ предыдущие годы студенты изготавливали прочные металлические информационные карточки с выгравированными на них различными ресурсами в составе комплекта, который раздавали бездомным, а также зарядные устройства для мобильных телефонов на солнечных батареях, которые отправляли в Африку.
Учительница была беременна. Студенты построили устройство, чтобы ее супруг, который передвигается в инвалидном кресле, мог прогуливаться с ребенком. Украшение Newseum в Вашингтоне было передано в дар Национальному конституционному центру в Филадельфии.
Newseum дарит исторический центр Филадельфии свой характерный фасад Первой поправки|Пегги Макглоун|18 марта 2021|Washington Post
Каждый чип имеет выгравированные «каналы», позволяющие любому запаху течь к каждому блоку обнаружения.
Ученые создали биогибридный нос, используя клетки комаров|Веер ракушек|26 января 2021|Центр Singularity
Когда Брюс убрал руку, колибри с браслетом, на котором выгравировано «J45264», отстегнулась.
Поймай меня, если сможешь: Невероятная колибри окольцована в парке Вирджинии|Джон Келли|18 января 2021|Washington Post
Я не мог заставить себя выгравировать окончание, отметить ее границу,
Рассвет гелиоцена — Выпуск 90: Что-то зеленое|Летний преторий|16 сентября 2020|Наутилус
Первая попытка гравировать на стекле М. де Пюйморен в Тулузе.
Книга истории и хронологии на каждый день|Джоэл Манселл
Каменщик выгравировал следующую эпитафию на жене торговца: «Добродетельная женщина — венец своему мужу».
Книга анекдотов и бюджет веселья;|Разное
Почему бы кому-нибудь, очень смелому, не зайти так далеко, чтобы приказать каменщику выгравировать дань уважения миру, который остался позади?
Приключения и увлечения|E. В. Лукас
Был отличный план, что он должен сделать серию рисунков на дереве, а Коул выгравировать их.
Жизнь Джеймса Макнейла Уистлера|Элизабет Робинс Пеннелл
Он сказал мне, что выгравирует ее имя на табличке в своем храме, перед которой каждый день возносится молитва.
Журнал из Японии|Мари Кармайкл Стоупс
Британский словарь определений слова engrave
engrave
/ (ɪnˈɡreɪv) /
verb и т. д.) на ( блок, пластина или другая поверхность, используемая для печати) с помощью резьбы, травления кислотой или другого процесса
для печати (рисунков или знаков) с печатной формы, изготовленной таким образом + могила ³, по образцу французского гравера
 5
5
 Блокировка шпинделя служит для простой и безопасной смены шлифкругов. Дополнительная рукоятка упрощает управление инструментом. Установить ее можно слева или справа, в зависимости от предпочтения оператора.
Блокировка шпинделя служит для простой и безопасной смены шлифкругов. Дополнительная рукоятка упрощает управление инструментом. Установить ее можно слева или справа, в зависимости от предпочтения оператора.


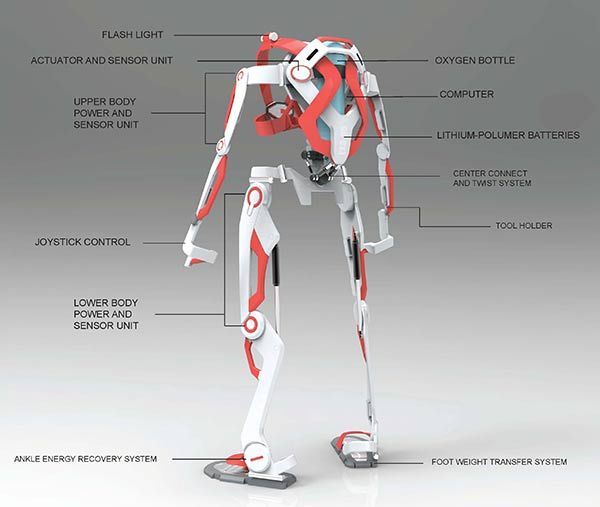 Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.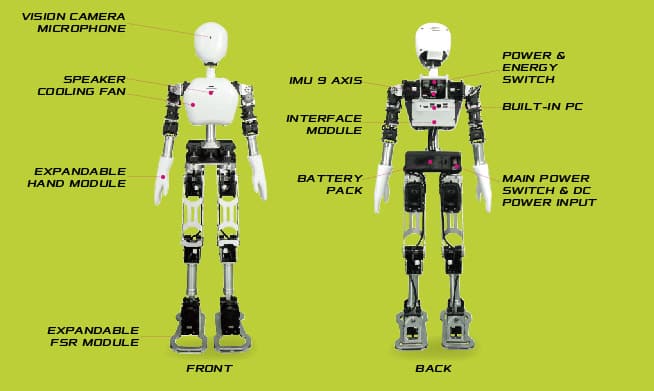
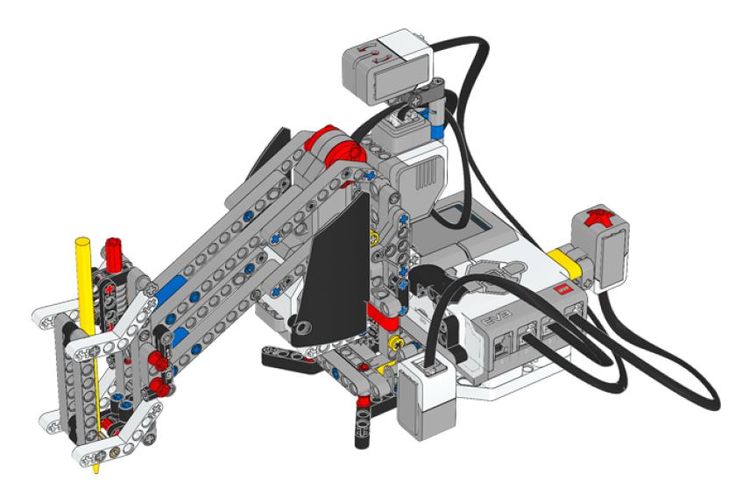
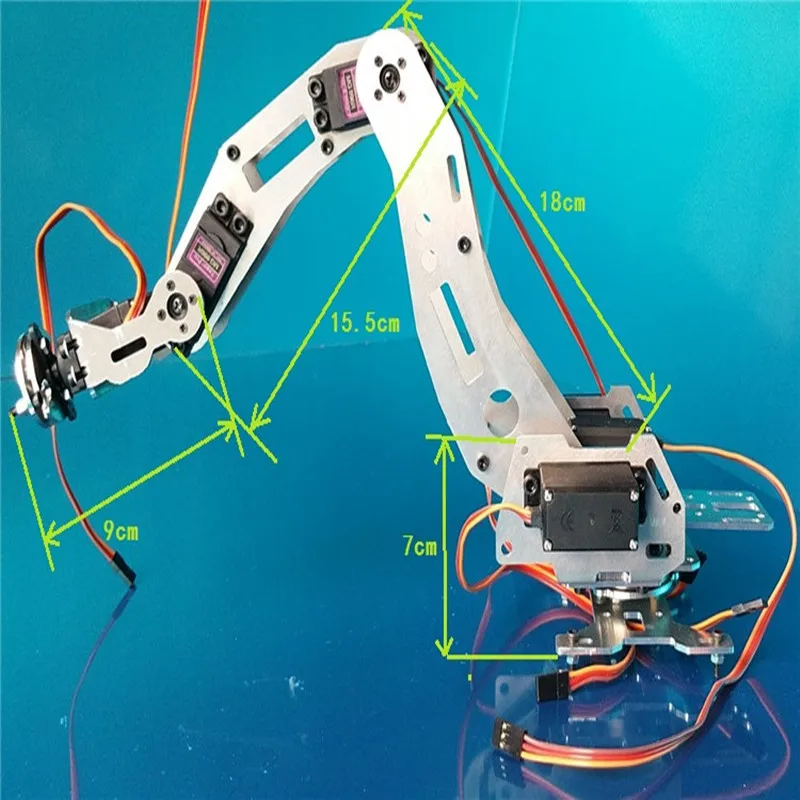

 Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.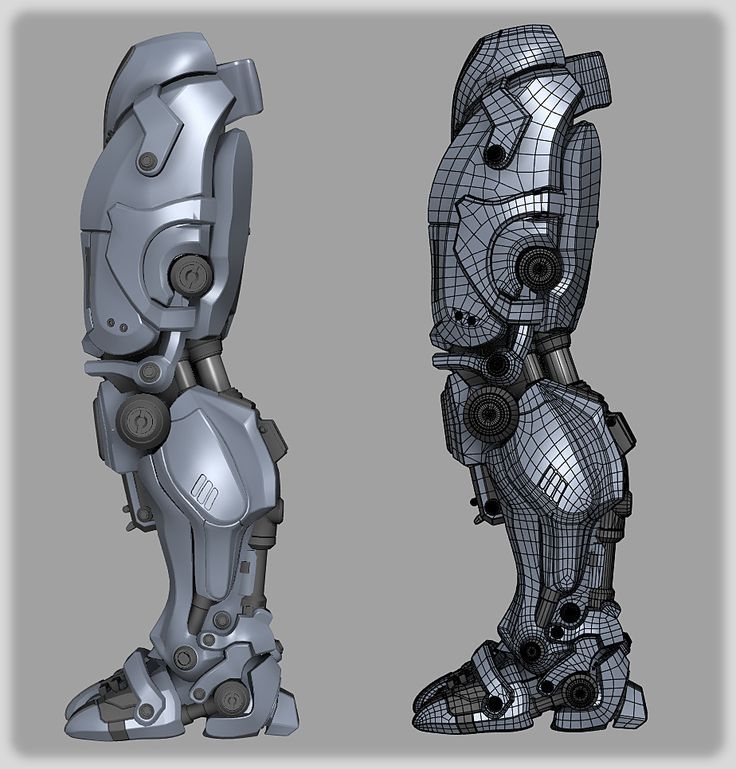
 Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.:quality(80)/images.vogel.de/vogelonline/bdb/819000/819097/original.jpg) п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.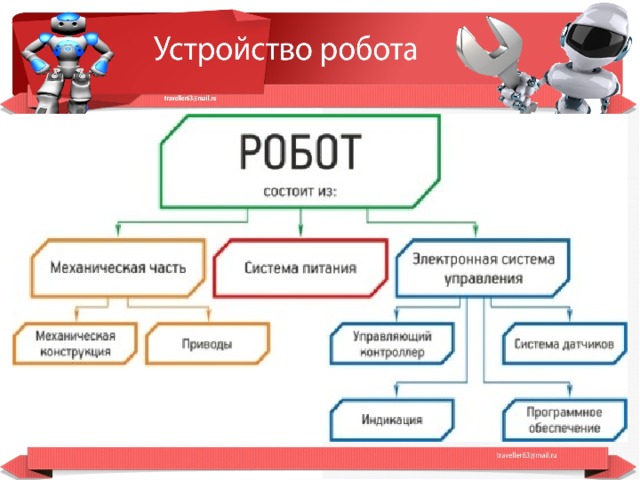
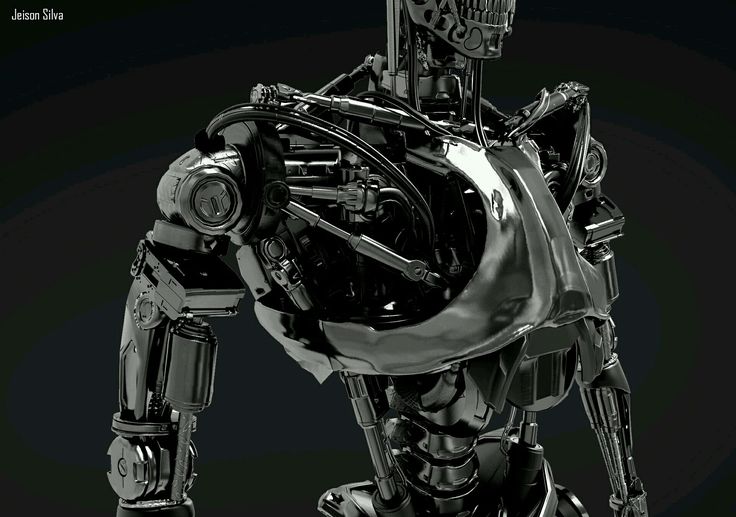
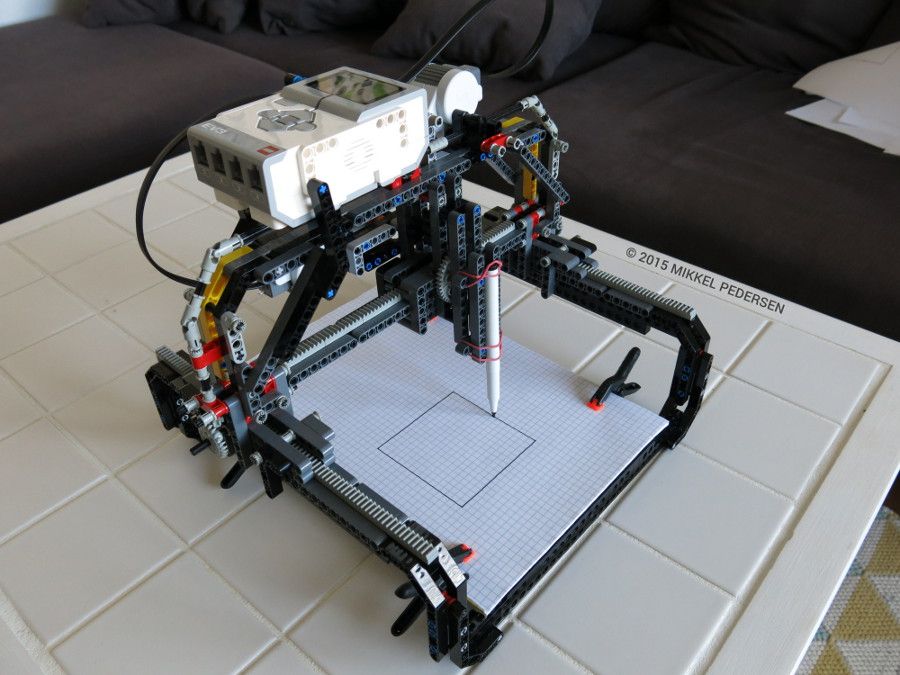
 д.).
д.).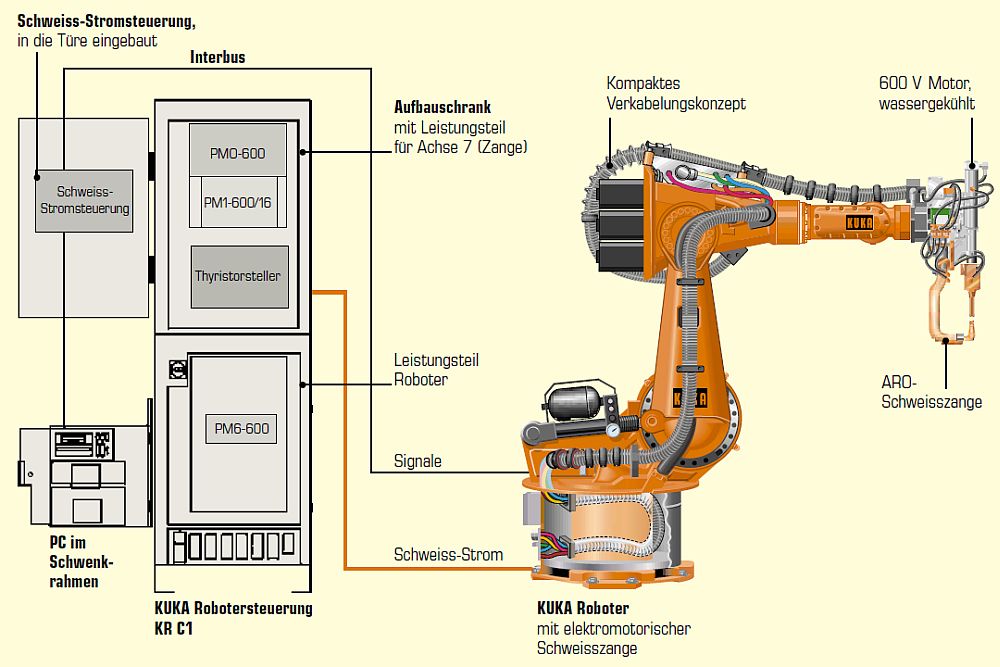
 Роботы имеют разные уровни автономии: от управляемых человеком ботов, выполняющих задачи, полностью контролируемые человеком, до полностью автономных ботов, выполняющих задачи без каких-либо внешних воздействий.
Роботы имеют разные уровни автономии: от управляемых человеком ботов, выполняющих задачи, полностью контролируемые человеком, до полностью автономных ботов, выполняющих задачи без каких-либо внешних воздействий. В этой статье рассматриваются характеристики роботов, элементы конструкции роботов и некоторые аспекты проектирования.
В этой статье рассматриваются характеристики роботов, элементы конструкции роботов и некоторые аспекты проектирования. В то время как машиностроение в более широком смысле представляет собой проектирование машин, разработчики роботов уделяют особое внимание двигателям и редукторам, чтобы обеспечить желаемое движение своих роботов.
В то время как машиностроение в более широком смысле представляет собой проектирование машин, разработчики роботов уделяют особое внимание двигателям и редукторам, чтобы обеспечить желаемое движение своих роботов. Микроконтроллер действует как мозг робота, которому нужны инструкции. Выбранный микроконтроллер определяет используемый язык программирования и то, как эта программа загружается в микроконтроллер.
Микроконтроллер действует как мозг робота, которому нужны инструкции. Выбранный микроконтроллер определяет используемый язык программирования и то, как эта программа загружается в микроконтроллер.
 Слишком мало электричества, и детали не будут работать, а слишком много электричества может поджарить хрупкие компоненты.
Слишком мало электричества, и детали не будут работать, а слишком много электричества может поджарить хрупкие компоненты.
 Дизайн имеет разные коннотации в разных областях. В некоторых случаях непосредственное конструирование объекта (например, в гончарном деле, машиностроении, менеджменте, графическом дизайне) также считается дизайном.
Дизайн имеет разные коннотации в разных областях. В некоторых случаях непосредственное конструирование объекта (например, в гончарном деле, машиностроении, менеджменте, графическом дизайне) также считается дизайном. Потратьте время на изучение ряда различных ситуаций, и как только вы решите, какова ситуация, и точно поймете, в чем проблема, напишите краткое описание проекта в журнале (это станет вашим рабочим документом, когда вы будете работать над своим проектом). robot.)
Потратьте время на изучение ряда различных ситуаций, и как только вы решите, какова ситуация, и точно поймете, в чем проблема, напишите краткое описание проекта в журнале (это станет вашим рабочим документом, когда вы будете работать над своим проектом). robot.) Получите четкое представление о Параметры проблемы.
Получите четкое представление о Параметры проблемы.  Иногда старые идеи оказываются лучшими. Вы когда-нибудь слышали поговорку: «Не изобретайте велосипед?» Старые идеи, которые потерпели неудачу, иногда становятся отличными золотыми приисками для исследований; эта идея могла потерпеть неудачу из-за отсутствия новых технологий, которые могут существовать сейчас.
Иногда старые идеи оказываются лучшими. Вы когда-нибудь слышали поговорку: «Не изобретайте велосипед?» Старые идеи, которые потерпели неудачу, иногда становятся отличными золотыми приисками для исследований; эта идея могла потерпеть неудачу из-за отсутствия новых технологий, которые могут существовать сейчас. Вы можете найти потенциальные, а иногда и дорогостоящие недостатки в проекте еще до того, как будет построен реальный макет.
Вы можете найти потенциальные, а иногда и дорогостоящие недостатки в проекте еще до того, как будет построен реальный макет. После того, как эти идеи были сведены к приемлемому числу, эти числа необходимо обработать, чтобы оценить вероятность и стоимость успешного результата с использованием отдельных решений. Здесь вступают в игру более важные факторы, такие как здравый смысл и инстинкт. Если это кажется неправильным, не делайте этого.
После того, как эти идеи были сведены к приемлемому числу, эти числа необходимо обработать, чтобы оценить вероятность и стоимость успешного результата с использованием отдельных решений. Здесь вступают в игру более важные факторы, такие как здравый смысл и инстинкт. Если это кажется неправильным, не делайте этого. В процессе инженерного проектирования есть петля, позволяющая вернуться к дизайну и уточнить или перепроектировать.
В процессе инженерного проектирования есть петля, позволяющая вернуться к дизайну и уточнить или перепроектировать.
 е. оборудование имеющее двигатель или конденсатор) нагрузки суммарной мощностью не более 2300 Вт (с учетом запаса мощности). Используется в качестве аварийного источника питания. Для качественной работы двигателя рекомендуется использовать неэтилированный бензин. Агрегат устанавливают на открытом воздухе, обеспечивая при этом защиту от атмосферных осадков и прямых солнечных лучей. Диапазон рабочих температур генератора — от -15 до +40 0С при относительной влажности воздуха до 90%. Важно отметить, что перед использованием корпус электростанции необходимо заземлить (сопротивление контура не менее 4 Ом).
е. оборудование имеющее двигатель или конденсатор) нагрузки суммарной мощностью не более 2300 Вт (с учетом запаса мощности). Используется в качестве аварийного источника питания. Для качественной работы двигателя рекомендуется использовать неэтилированный бензин. Агрегат устанавливают на открытом воздухе, обеспечивая при этом защиту от атмосферных осадков и прямых солнечных лучей. Диапазон рабочих температур генератора — от -15 до +40 0С при относительной влажности воздуха до 90%. Важно отметить, что перед использованием корпус электростанции необходимо заземлить (сопротивление контура не менее 4 Ом).
 Расход примерно такой же как заявляет производитель, не заметил существенной разницы. Из минусов, как мне показалось, ощутимый шум, но если поставить аппарат не под ухом, а дальше, то проблема будет решена. В любом, случае, спасал меня не раз, и даже без вопросов работает несколько газов подряд. Общую максимальную нагрузку тянет на 100%. И при небольшой минусовой температуре заводится легко.
Расход примерно такой же как заявляет производитель, не заметил существенной разницы. Из минусов, как мне показалось, ощутимый шум, но если поставить аппарат не под ухом, а дальше, то проблема будет решена. В любом, случае, спасал меня не раз, и даже без вопросов работает несколько газов подряд. Общую максимальную нагрузку тянет на 100%. И при небольшой минусовой температуре заводится легко. youtube.com/embed/6EZHkE7w-2Q» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/6EZHkE7w-2Q» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/> А мой бегемот 2 литра при малой нагрузке лопает, и ещё просит, а бензинчик нынче дорог!
А мой бегемот 2 литра при малой нагрузке лопает, и ещё просит, а бензинчик нынче дорог! Посчитать мощность было не сложно, взял с запасом. За 2 года использования аппарат champion зарекомендовал себя с хорошей стороны. Расход, наверное, больше, чем у дизельного, но так как я включаю его от случая к случаю, все расходы не заметны. А так выходит примерно 1.5 л в час. Сильного шума я не наблюдал, по крайней мере, меня включенный генератор не напрягает. Из бонусов хочется отметить индикатор перегрузки, так что всегд…
Посчитать мощность было не сложно, взял с запасом. За 2 года использования аппарат champion зарекомендовал себя с хорошей стороны. Расход, наверное, больше, чем у дизельного, но так как я включаю его от случая к случаю, все расходы не заметны. А так выходит примерно 1.5 л в час. Сильного шума я не наблюдал, по крайней мере, меня включенный генератор не напрягает. Из бонусов хочется отметить индикатор перегрузки, так что всегд… Всегда заводится.
Всегда заводится. на веб-сайте cabelas.com (открывается в новой вкладке)
на веб-сайте cabelas.com (открывается в новой вкладке)

 Поскольку к устройству прилагается двухпортовый USB-адаптер, вы также сможете использовать розетку постоянного тока для удобной зарядки электроники, такой как мобильные телефоны и планшеты.
Поскольку к устройству прилагается двухпортовый USB-адаптер, вы также сможете использовать розетку постоянного тока для удобной зарядки электроники, такой как мобильные телефоны и планшеты.
 Официальный чехол для хранения и беговой чехол также можно приобрести отдельно.
Официальный чехол для хранения и беговой чехол также можно приобрести отдельно.
 Если вы хотите еще больше повысить эффективность использования топлива, генератор Champion 200988, который может похвастаться расходом газа всего 0,16 галлона в час, может стать для вас подходящим генератором.
Если вы хотите еще больше повысить эффективность использования топлива, генератор Champion 200988, который может похвастаться расходом газа всего 0,16 галлона в час, может стать для вас подходящим генератором.
 размеры (Д x Ш x В)
размеры (Д x Ш x В)


 6
6
 Y20
Y20
 Существует три метода программирования обработки для станков с ЧПУ:
Существует три метода программирования обработки для станков с ЧПУ:

 Код G01 отменяется кодами: G00, G02, G03.
Код G01 отменяется кодами: G00, G02, G03.
 Плоскость XZ становится определяющей при использовании круговой интерполяции, вращении системы координат и постоянных циклов сверления.
Плоскость XZ становится определяющей при использовании круговой интерполяции, вращении системы координат и постоянных циклов сверления. Программируется вместе с функцией инструмента (D).
Программируется вместе с функцией инструмента (D).
 Движение в
Движение в




 Они имеют историческое происхождение, восходящее к тому времени, когда программы NC хранились на перфоленте. До сих пор есть машины, которые с удовольствием производят детали, которые работали таким образом, но к настоящему времени их контроллеры часто обновлялись или, по крайней мере, устройство чтения ленты было заменено интерфейсом последовательного порта или USB-ключа.
Они имеют историческое происхождение, восходящее к тому времени, когда программы NC хранились на перфоленте. До сих пор есть машины, которые с удовольствием производят детали, которые работали таким образом, но к настоящему времени их контроллеры часто обновлялись или, по крайней мере, устройство чтения ленты было заменено интерфейсом последовательного порта или USB-ключа.
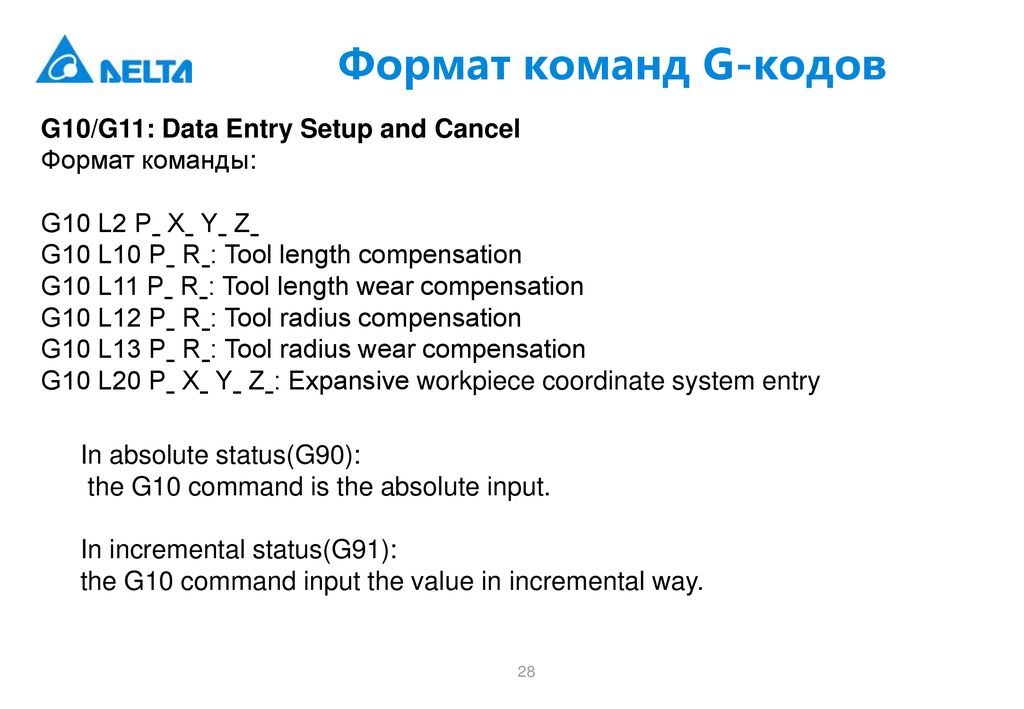
 Если у строки есть порядковый номер, перед ним может стоять только символ пропуска блока. В противном случае порядковый номер должен быть первым в строке.
Если у строки есть порядковый номер, перед ним может стоять только символ пропуска блока. В противном случае порядковый номер должен быть первым в строке.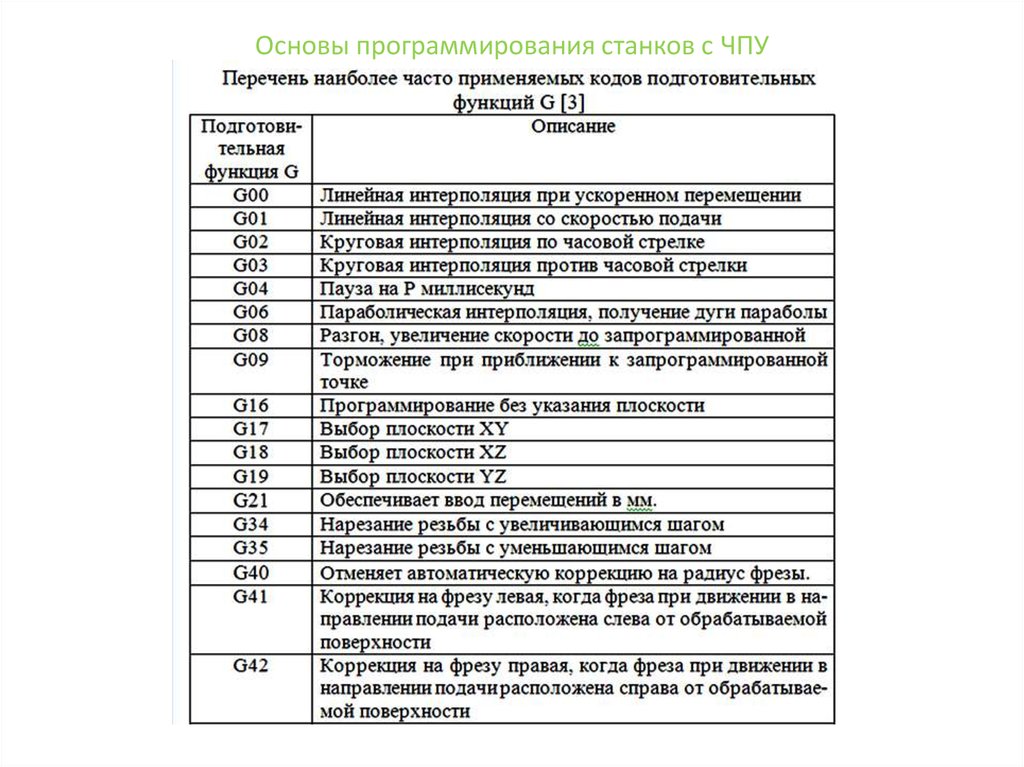 Стоит иметь в виду, что если вы используете старый контроллер, одной из постоянных проблем является объем памяти контроллера. Удаление пробелов и неиспользуемых порядковых номеров может освободить довольно много байтов, уменьшив ваши программы G-кода. Не упускайте возможность сделать что-то подобное, если это необходимо для выполнения работы.
Стоит иметь в виду, что если вы используете старый контроллер, одной из постоянных проблем является объем памяти контроллера. Удаление пробелов и неиспользуемых порядковых номеров может освободить довольно много байтов, уменьшив ваши программы G-кода. Не упускайте возможность сделать что-то подобное, если это необходимо для выполнения работы.
 Вот, например, порядок выполнения для RS-274 G-Code:
Вот, например, порядок выполнения для RS-274 G-Code: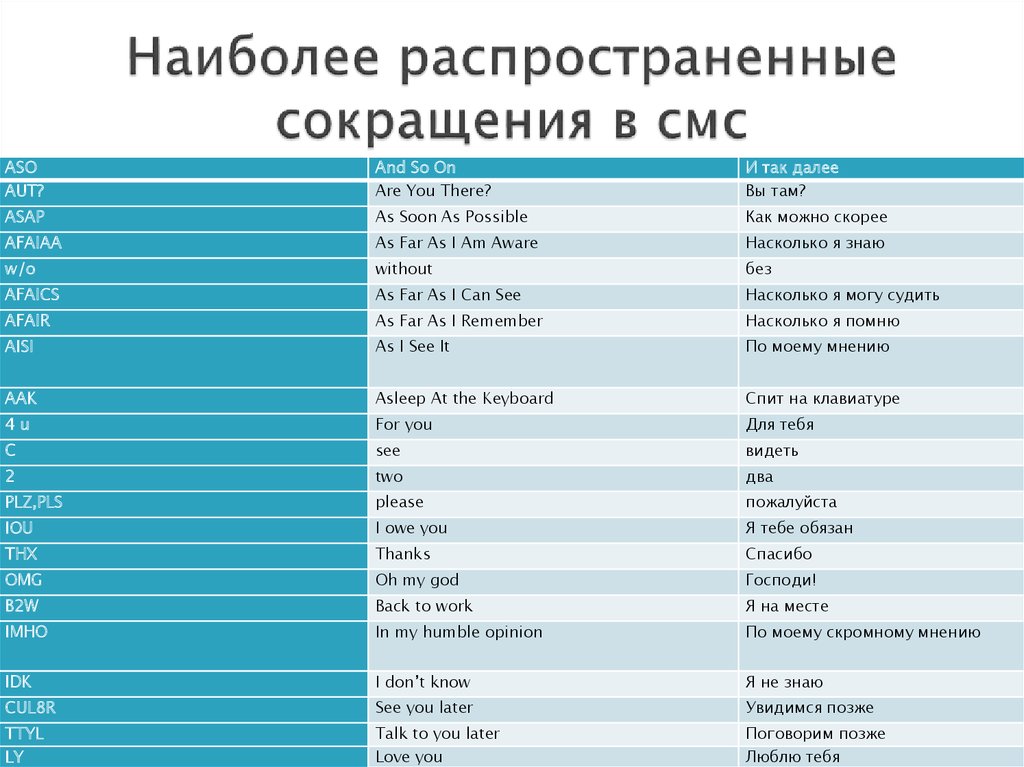 Установить режим расстояния (G90, G91).
Установить режим расстояния (G90, G91).  После того, как мы выполнили «G00», мы перевели контроллер в режим Rapids. Любые координатные слова приведут к ускоренному движению к координате. Эти режимы — еще одна причина, чтобы знать порядок выполнения слов в блоке, так как многие слова создают режимы, которые влияют на другие слова, следующие за ними.
После того, как мы выполнили «G00», мы перевели контроллер в режим Rapids. Любые координатные слова приведут к ускоренному движению к координате. Эти режимы — еще одна причина, чтобы знать порядок выполнения слов в блоке, так как многие слова создают режимы, которые влияют на другие слова, следующие за ними. Так что не стоит слишком торопиться. Держите вместе то, что имеет смысл, и пусть то, что не имеет смысла, распределяется по отдельным блокам, чтобы сделать код более понятным.
Так что не стоит слишком торопиться. Держите вместе то, что имеет смысл, и пусть то, что не имеет смысла, распределяется по отдельным блокам, чтобы сделать код более понятным. Например:
Например: ———————)
———————)
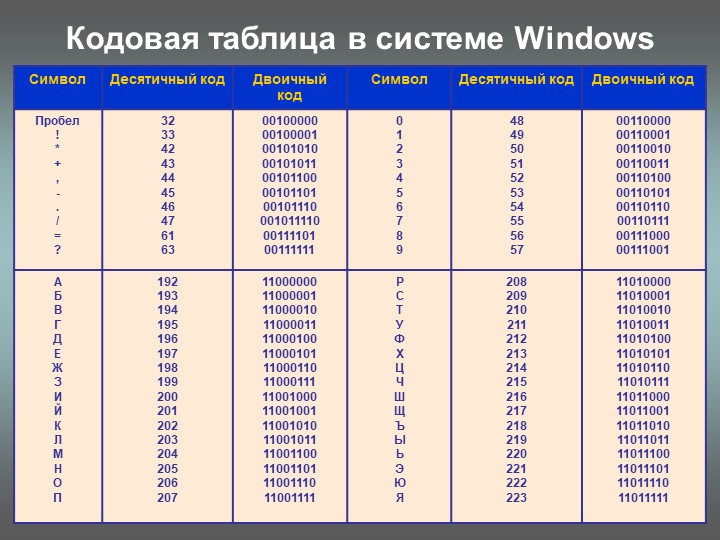 12)
12) 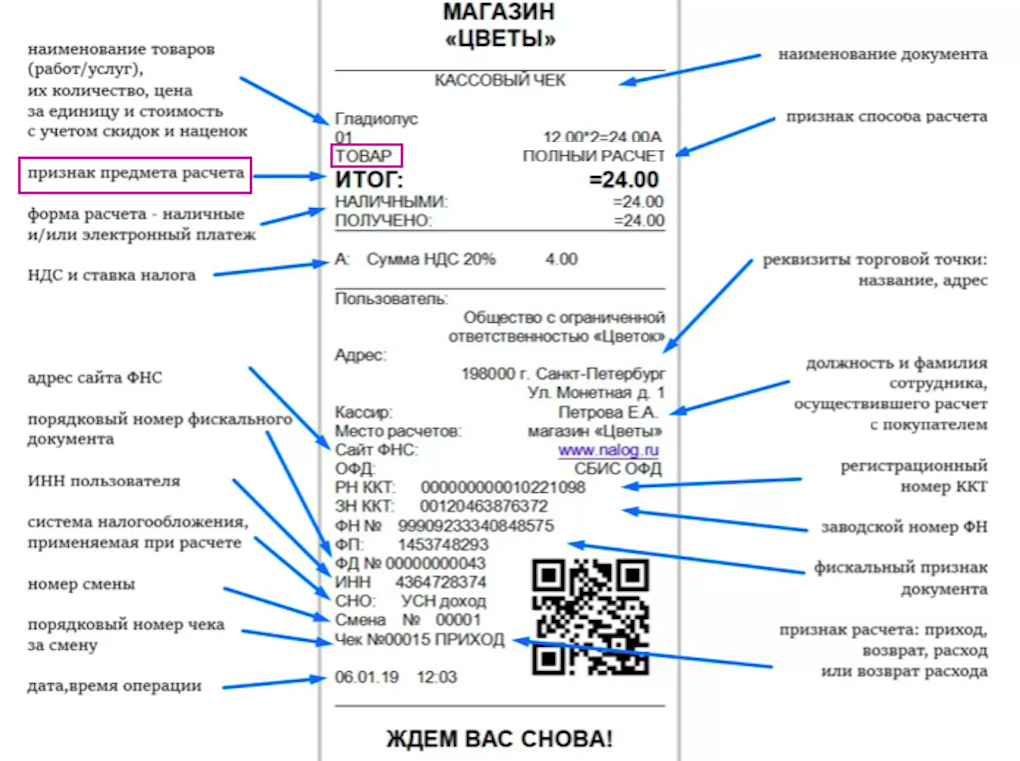

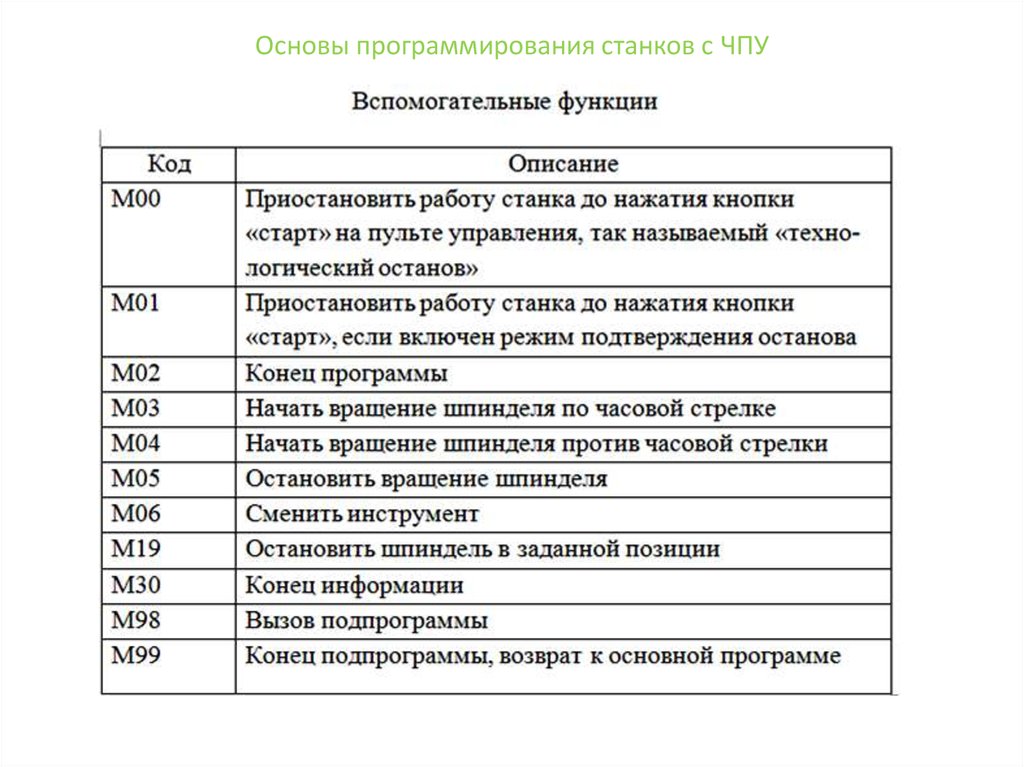
 Например, если тип группы B использует G90 и G91 для переключения между абсолютными и инкрементными командами, тип группы A вместо этого использует адреса U и W для идентификации этих перемещений.
Например, если тип группы B использует G90 и G91 для переключения между абсолютными и инкрементными командами, тип группы A вместо этого использует адреса U и W для идентификации этих перемещений.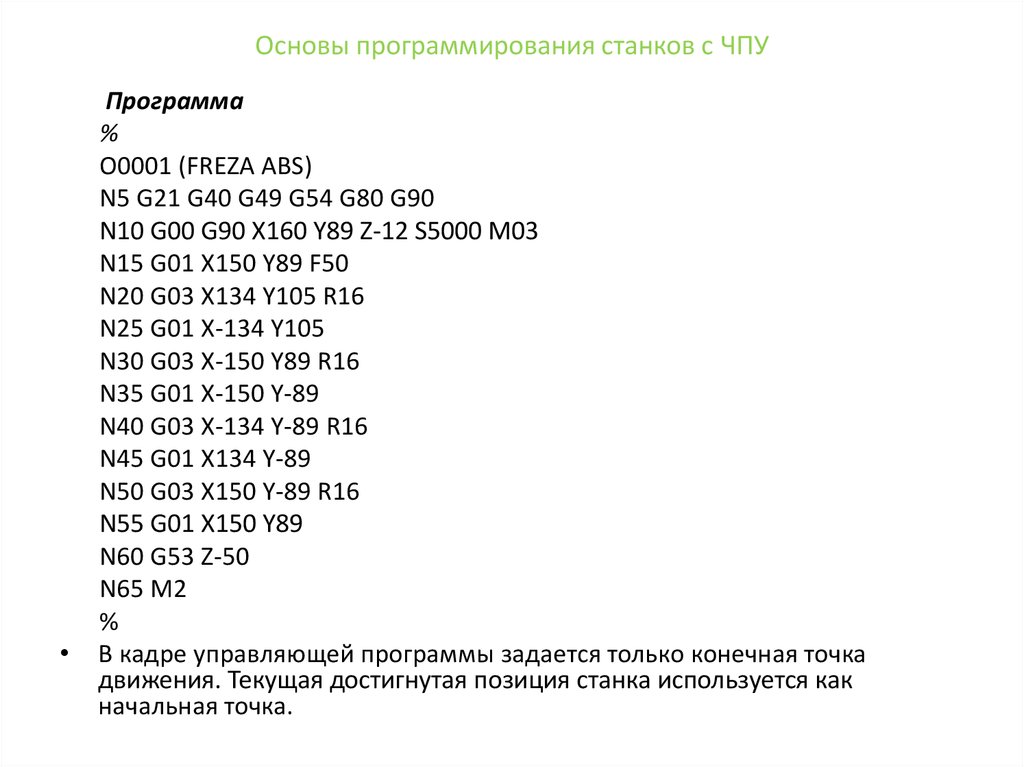 Создавая переменные, которые можно изменять, размеры элементов, такие как ширина канавки, можно регулировать без изменения программы. Они также позволяют той же программе обрабатывать семейство размеров деталей, которые могут быть представлены в виде таблицы на чертеже. Переменным присваиваются адреса, которые обычно вызываются в строке программы следующим образом: G00 X#123, что указывает машине быстро перейти к ячейке, сохраненной в переменной с адресом 123.
Создавая переменные, которые можно изменять, размеры элементов, такие как ширина канавки, можно регулировать без изменения программы. Они также позволяют той же программе обрабатывать семейство размеров деталей, которые могут быть представлены в виде таблицы на чертеже. Переменным присваиваются адреса, которые обычно вызываются в строке программы следующим образом: G00 X#123, что указывает машине быстро перейти к ячейке, сохраненной в переменной с адресом 123.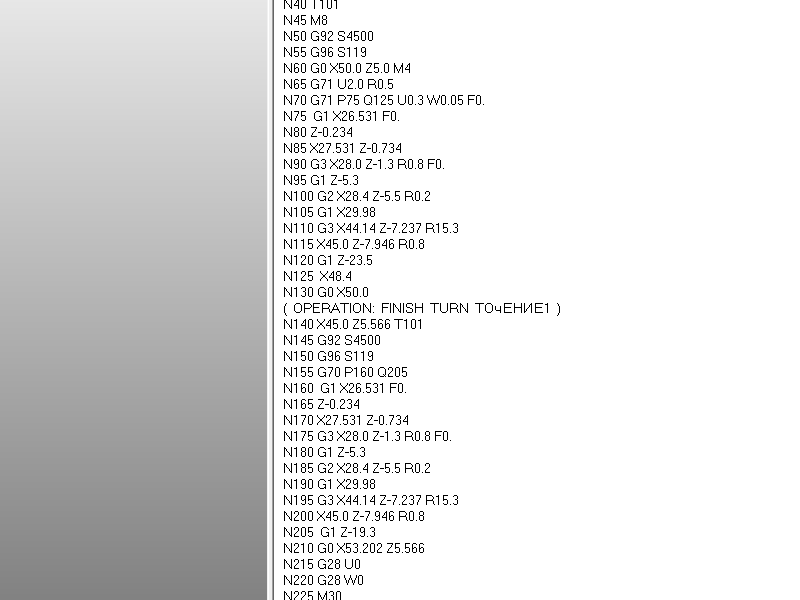
 Это не так.
Это не так. ru
ru Для его производства преимущественно используются тяжелые фракции нефти, уголь и природный газ. Пластические массы получаются в результате высокомолекулярных соединений.
Для его производства преимущественно используются тяжелые фракции нефти, уголь и природный газ. Пластические массы получаются в результате высокомолекулярных соединений.

 Изображение градусника свидетельствует о стойкости к перепадам температуры.
Изображение градусника свидетельствует о стойкости к перепадам температуры. Для того, чтобы их разломить, понадобятся неимоверные усилия. Большим достоинством является легкость его обработки. Пластик 5 (полипропилен) можно сваривать, гнуть, подвергать распилу и сверлению.
Для того, чтобы их разломить, понадобятся неимоверные усилия. Большим достоинством является легкость его обработки. Пластик 5 (полипропилен) можно сваривать, гнуть, подвергать распилу и сверлению.

 Однако, без особой необходимости не стоит этого делать часто, поскольку выделяемые токсичные вещества могут нанести здоровью существенный вред.
Однако, без особой необходимости не стоит этого делать часто, поскольку выделяемые токсичные вещества могут нанести здоровью существенный вред.
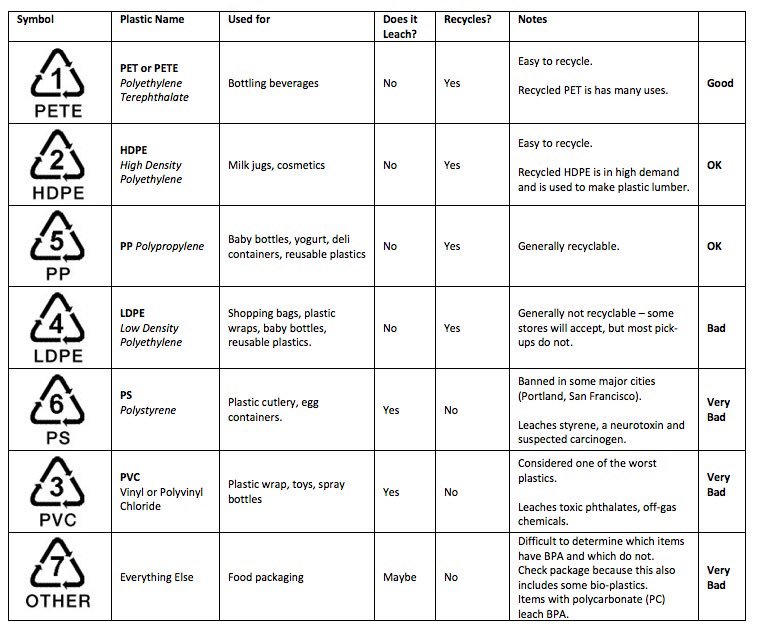
 Не преследуйте цель получить деньги за эти отходы — важно, чтобы как можно больше пластика приходило на утилизацию, и оставалось меньше мусора.
Не преследуйте цель получить деньги за эти отходы — важно, чтобы как можно больше пластика приходило на утилизацию, и оставалось меньше мусора.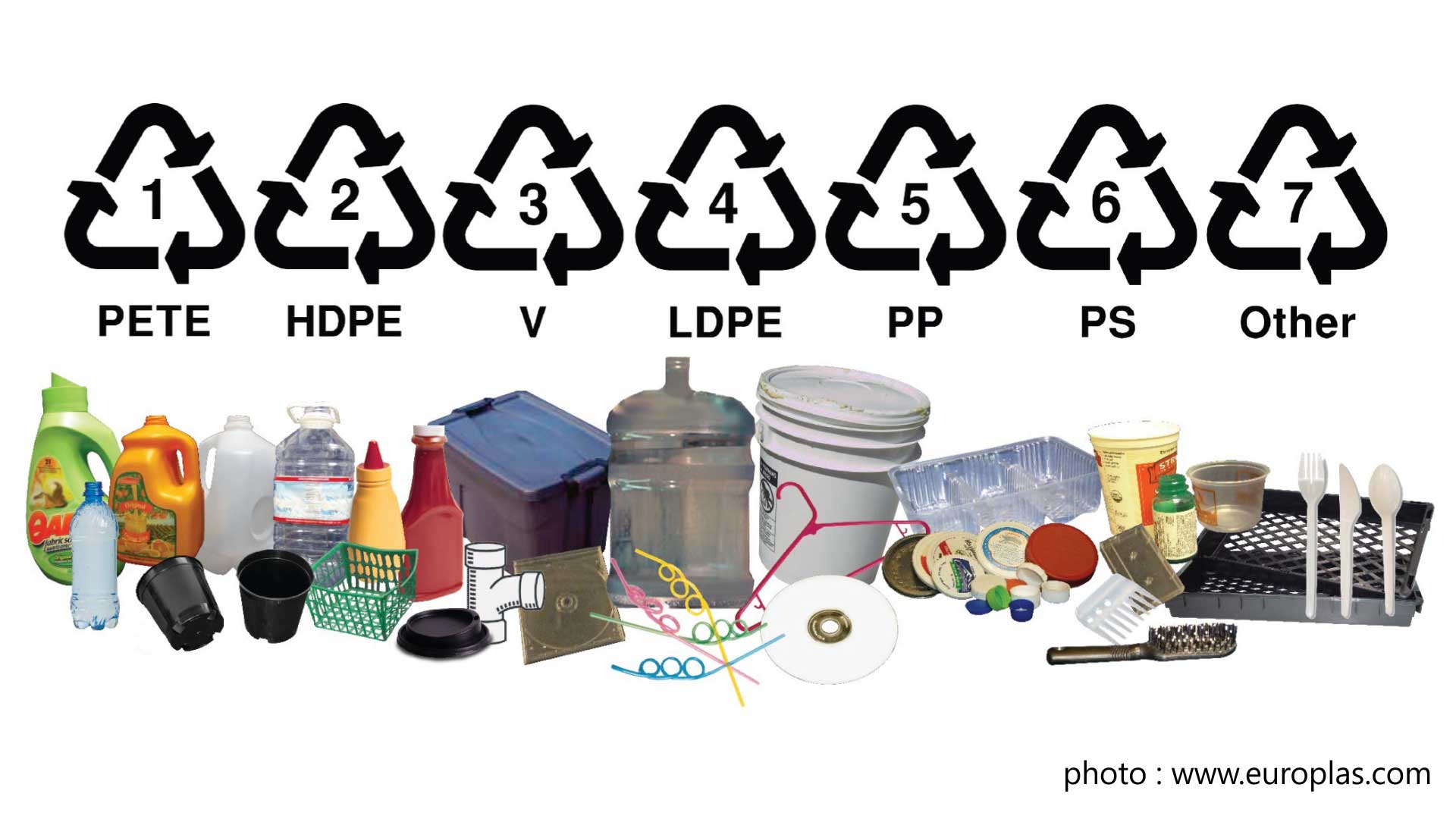
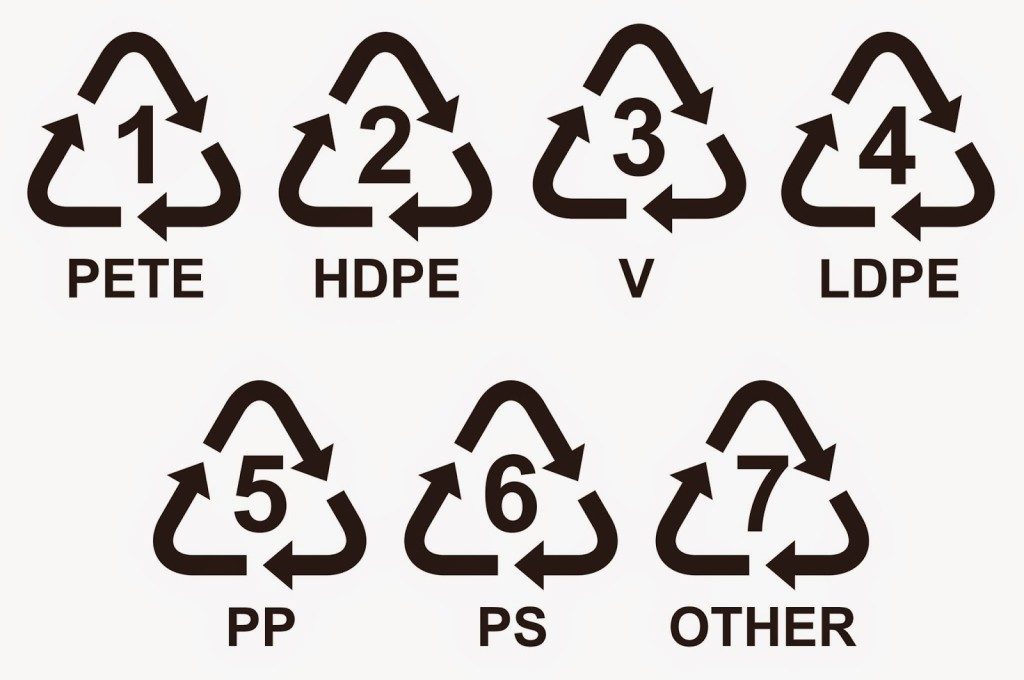
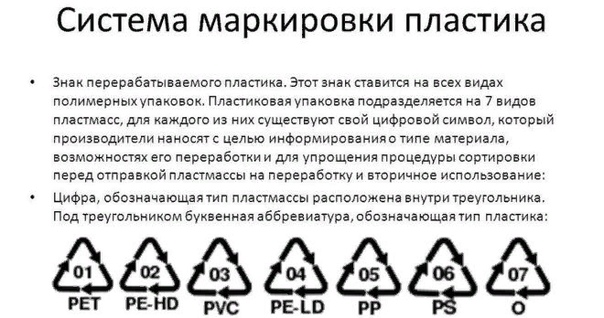 Они приветствуют бутылки с лекарствами, контейнеры для йогурта, банки с хумусом и многое другое. Preserve также прекращает свою программу возврата зубных щеток по почте.
Они приветствуют бутылки с лекарствами, контейнеры для йогурта, банки с хумусом и многое другое. Preserve также прекращает свою программу возврата зубных щеток по почте.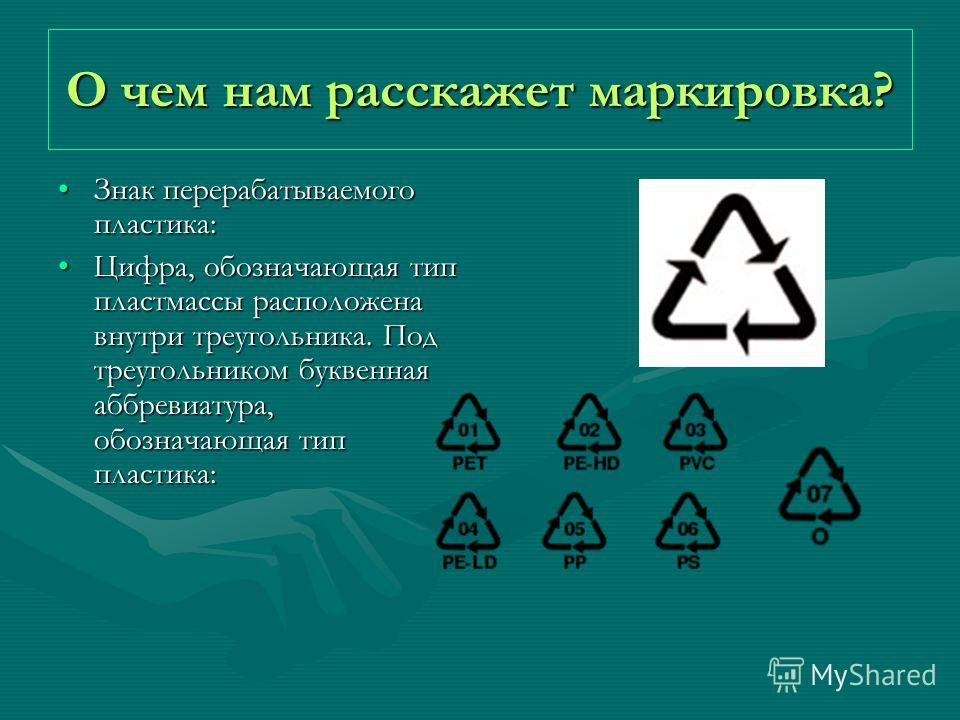 Изображение Bob Williams с сайта Pixabay
Изображение Bob Williams с сайта Pixabay Мы призываем вас сделать все возможное, чтобы избавиться от пластиковых отходов. Для начала стоит избегать пластмасс, таких как полипропилен, которые нельзя переработать или сдать на уничтожение.
Мы призываем вас сделать все возможное, чтобы избавиться от пластиковых отходов. Для начала стоит избегать пластмасс, таких как полипропилен, которые нельзя переработать или сдать на уничтожение.
 Полипропилен также обладает высокими изоляционными свойствами, что делает его безопасным для использования в пластиковых корпусах электротоваров и кабелей. В форме волокна полипропилен используется не только для изготовления больших сумок, но и для гораздо более широкого спектра других продуктов, включая веревки, шпагат, ленту, ковры, обивку, одежду и снаряжение для кемпинга. Его водонепроницаемые свойства делают его особенно эффективным для морского сектора. автомобильная промышленность , полипропилен также широко используется, например, для корпусов аккумуляторов, поддонов и подстаканников, бамперов, деталей интерьера, приборных панелей и обивки дверей.
Полипропилен также обладает высокими изоляционными свойствами, что делает его безопасным для использования в пластиковых корпусах электротоваров и кабелей. В форме волокна полипропилен используется не только для изготовления больших сумок, но и для гораздо более широкого спектра других продуктов, включая веревки, шпагат, ленту, ковры, обивку, одежду и снаряжение для кемпинга. Его водонепроницаемые свойства делают его особенно эффективным для морского сектора. автомобильная промышленность , полипропилен также широко используется, например, для корпусов аккумуляторов, поддонов и подстаканников, бамперов, деталей интерьера, приборных панелей и обивки дверей. Различные вариации полипропилена привели к тому, что этот материал стал известен как «сталь» в индустрии пластмасс, поскольку его можно использовать и обрабатывать несколькими способами.
Различные вариации полипропилена привели к тому, что этот материал стал известен как «сталь» в индустрии пластмасс, поскольку его можно использовать и обрабатывать несколькими способами. Он мягкий, податливый и имеет относительно низкую температуру плавления , что делает его очень удобным для использования в процессе литья под давлением, где он поставляется в гранулах. Он также хорошо течет из-за низкой вязкости расплава.
Он мягкий, податливый и имеет относительно низкую температуру плавления , что делает его очень удобным для использования в процессе литья под давлением, где он поставляется в гранулах. Он также хорошо течет из-за низкой вязкости расплава. Он может предложить большое разнообразие цветов, так как он может быть изготовлен как непрозрачный или прозрачный термопластик и использоваться, когда желательна некоторая передача света. Его более легкая плотность позволяет использовать его в приложениях, где снижение веса должно быть ключевым фактором.
Он может предложить большое разнообразие цветов, так как он может быть изготовлен как непрозрачный или прозрачный термопластик и использоваться, когда желательна некоторая передача света. Его более легкая плотность позволяет использовать его в приложениях, где снижение веса должно быть ключевым фактором. Если вы попытаетесь повторно нагреть полипропилен, который уже был расплавлен и сформирован, он просто сгорит, а не расплавится во второй раз. Необходимо рассмотреть другие методы переработки или повторного кондиционирования, стоимость которых значительно выше.
Если вы попытаетесь повторно нагреть полипропилен, который уже был расплавлен и сформирован, он просто сгорит, а не расплавится во второй раз. Необходимо рассмотреть другие методы переработки или повторного кондиционирования, стоимость которых значительно выше. Хотя полипропилен не считается очень экологически чистым из-за сложностей в процессе переработки, изделия из полипропилена можно безопасно использовать повторно, и они достаточно прочны, чтобы противостоять нормальному износу в течение нескольких применений. Еще один момент, указывающий на безопасность полипропилена, заключается в том, что термопласт часто используется для изготовления
Хотя полипропилен не считается очень экологически чистым из-за сложностей в процессе переработки, изделия из полипропилена можно безопасно использовать повторно, и они достаточно прочны, чтобы противостоять нормальному износу в течение нескольких применений. Еще один момент, указывающий на безопасность полипропилена, заключается в том, что термопласт часто используется для изготовления д. В зависимости от способа производства и состава полипропилен может быть:
д. В зависимости от способа производства и состава полипропилен может быть: Это помогает в выборе правильного термопластика для применения. Это также помогает оценить, будут ли выполнены требования конечного использования. Вот некоторые ключевые свойства и преимущества полипропилена:
Это помогает в выборе правильного термопластика для применения. Это также помогает оценить, будут ли выполнены требования конечного использования. Вот некоторые ключевые свойства и преимущества полипропилена: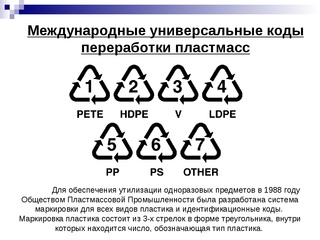
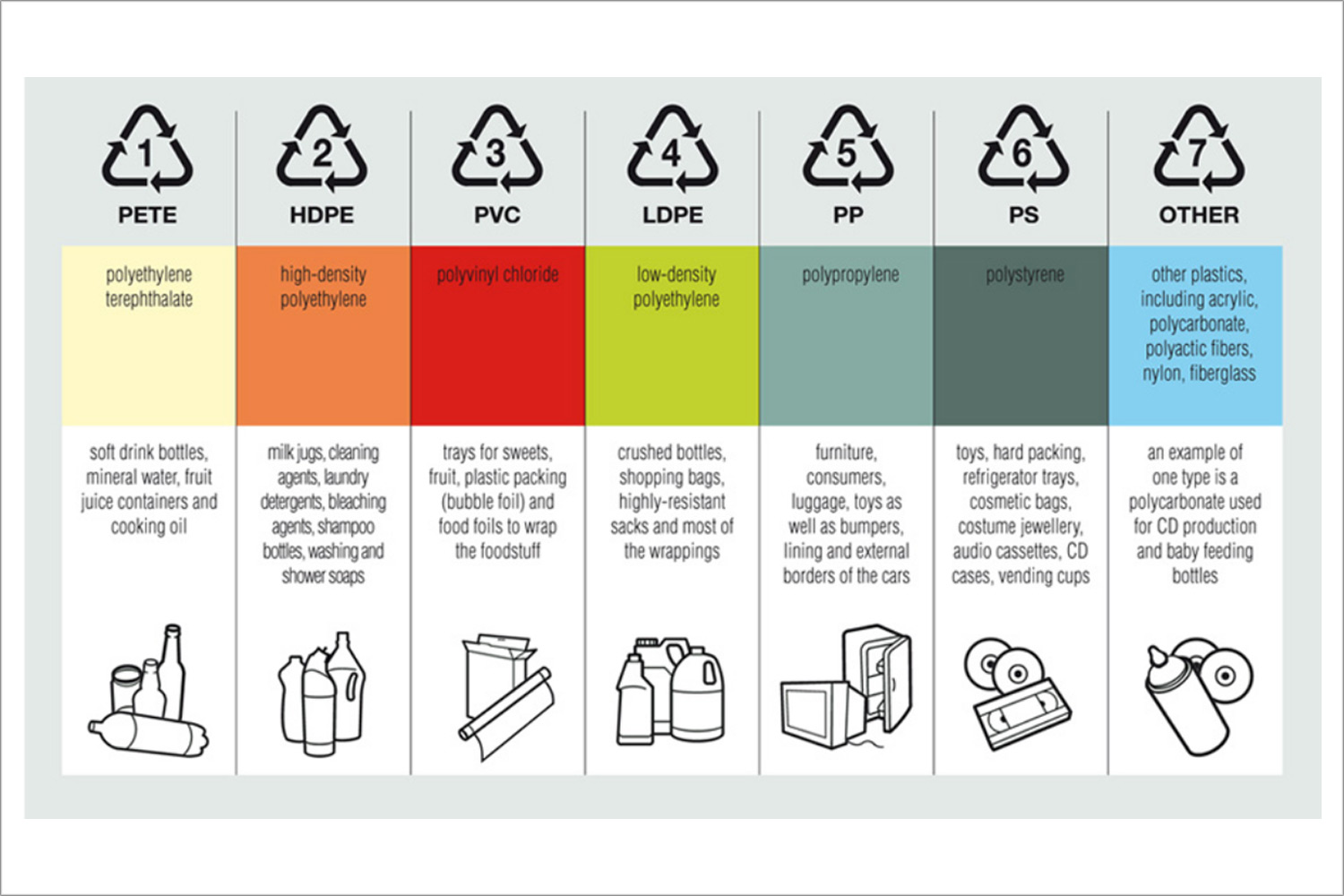
 Он имеет содержание этилена 45-65%. Это полезно в деталях, которые требуют хорошей ударопрочности. Ударопрочные сополимеры в основном используются в упаковке, посуде, пленке и трубах. Они также используются в автомобильном и электрическом сегментах.
Он имеет содержание этилена 45-65%. Это полезно в деталях, которые требуют хорошей ударопрочности. Ударопрочные сополимеры в основном используются в упаковке, посуде, пленке и трубах. Они также используются в автомобильном и электрическом сегментах. Кроме того, введение сомономеров снижает кристаллическую однородность полимера. Это делает его пригодным для герметизации пленкой.
Кроме того, введение сомономеров снижает кристаллическую однородность полимера. Это делает его пригодным для герметизации пленкой. д.
д.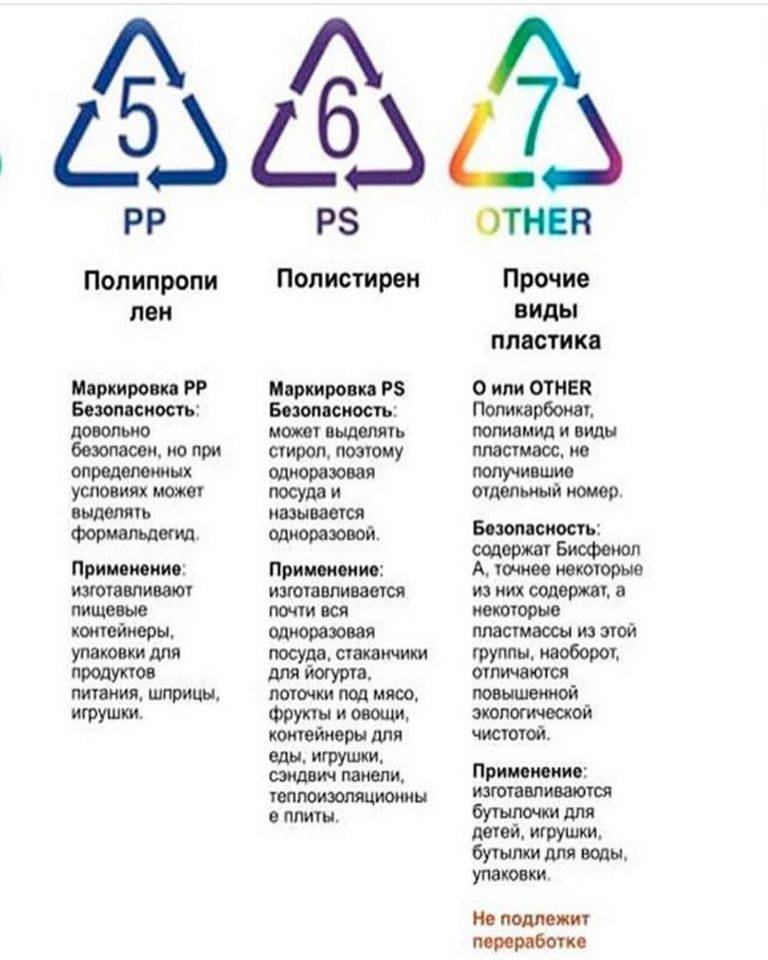

 Ознакомьтесь с заполненными или усиленными вариантами, чтобы выбрать класс по вашему выбору:
Ознакомьтесь с заполненными или усиленными вариантами, чтобы выбрать класс по вашему выбору: Самоармирующийся полипропилен предлагает уникальное сочетание характеристик обработки и производительности. Узнайте больше о преимуществах и области применения прямо сейчас »
Самоармирующийся полипропилен предлагает уникальное сочетание характеристик обработки и производительности. Узнайте больше о преимуществах и области применения прямо сейчас » Используется для гибкой упаковки, а также для промышленного применения. Две важные формы полипропиленовых пленок включают:
Используется для гибкой упаковки, а также для промышленного применения. Две важные формы полипропиленовых пленок включают:
 Он в основном используется для серийного и непрерывного производства.
Он в основном используется для серийного и непрерывного производства. Это делает его пригодным для приложений 3D-печати. Следовательно, рекомендуется тщательно обращаться к документации, предоставленной поставщиком, по температуре печати, печатной платформе и т. д.
Это делает его пригодным для приложений 3D-печати. Следовательно, рекомендуется тщательно обращаться к документации, предоставленной поставщиком, по температуре печати, печатной платформе и т. д.
 д.
д. Они оба могут быть спроектированы так, чтобы быть прочными и легкими. Эти полимеры используются во многих областях, таких как бутылки и перчатки. Но PP имеет кристально чистую прозрачность, чем PE. ПП обладает отличными механическими свойствами. Обладает высокой устойчивостью к усталости, ударам, теплу и замерзанию.
Они оба могут быть спроектированы так, чтобы быть прочными и легкими. Эти полимеры используются во многих областях, таких как бутылки и перчатки. Но PP имеет кристально чистую прозрачность, чем PE. ПП обладает отличными механическими свойствами. Обладает высокой устойчивостью к усталости, ударам, теплу и замерзанию. HDPE считается более жестким, чем PP.
HDPE считается более жестким, чем PP. Основные характеристики полипропилена по сравнению с ПЭТ включают:
Основные характеристики полипропилена по сравнению с ПЭТ включают: Осветленные сорта полипропилена имеют прозрачность и блеск, сравнимые с ПЭТ.
Осветленные сорта полипропилена имеют прозрачность и блеск, сравнимые с ПЭТ.
 Заполнение содержимым; 22. Совмещение краев пакета; 23. Запечатывание верха пакета; 24. Охлаждение и выравнивание; 25. Готовая продукция; 26. Выход готового изделия.
Заполнение содержимым; 22. Совмещение краев пакета; 23. Запечатывание верха пакета; 24. Охлаждение и выравнивание; 25. Готовая продукция; 26. Выход готового изделия. *
* 


 ч.
ч. Усольский район, п. Белореченский
Усольский район, п. Белореченский  Для получения прайса на интересующую Вас единицу оборудования, пожалуйста, заполните следующую форму.
Для получения прайса на интересующую Вас единицу оборудования, пожалуйста, заполните следующую форму.
 Загляните на стенд…
Загляните на стенд…
 Мы очень тщательно следим за качеством реализуемой продукции и отдаем предпочтение только проверенным производителям.
Мы очень тщательно следим за качеством реализуемой продукции и отдаем предпочтение только проверенным производителям. Если Вы не хотите, чтобы Ваши данные обрабатывались, необходимо соответствующим образом установить настройки браузера или не использовать сайт.
Если Вы не хотите, чтобы Ваши данные обрабатывались, необходимо соответствующим образом установить настройки браузера или не использовать сайт.
 В этом посте объясняется, как определить размер, источник питания и стиль барабана после того, как вы выбрали тип микшера.
В этом посте объясняется, как определить размер, источник питания и стиль барабана после того, как вы выбрали тип микшера. Эти монстры могут одновременно покрывать около 58 квадратных футов столешницы, что примерно соответствует размеру средней кухонной столешницы.
Эти монстры могут одновременно покрывать около 58 квадратных футов столешницы, что примерно соответствует размеру средней кухонной столешницы. Вообще говоря, миксер может обрабатывать примерно от ¼ до 1/3 заявленного объема при смешивании жесткого бетона и около ½ или более заявленного объема при смешивании жидкого бетона. Тип микшера также является здесь важным фактором; барабанные смесители и смесители с вертикальным валом могут производить больше бетона при заданном размере барабана, чем растворосмесители.
Вообще говоря, миксер может обрабатывать примерно от ¼ до 1/3 заявленного объема при смешивании жесткого бетона и около ½ или более заявленного объема при смешивании жидкого бетона. Тип микшера также является здесь важным фактором; барабанные смесители и смесители с вертикальным валом могут производить больше бетона при заданном размере барабана, чем растворосмесители. Двигатели бывают разного напряжения и мощности. Обычно в небольших миксерах используются двигатели на 110 вольт мощностью от 1/3 до 1-1/2 лошадиных сил (л.с.), в то время как в более крупных миксерах используются двигатели на 220 вольт мощностью от 1 до 5 л.с.
Двигатели бывают разного напряжения и мощности. Обычно в небольших миксерах используются двигатели на 110 вольт мощностью от 1/3 до 1-1/2 лошадиных сил (л.с.), в то время как в более крупных миксерах используются двигатели на 220 вольт мощностью от 1 до 5 л.с. И их можно использовать внутрь.
И их можно использовать внутрь.
 Удалите с ножа появившуюся ржавчину
Удалите с ножа появившуюся ржавчину comТеперь можно поставить лезвия в пазы, зафиксировать их и приступать к заточке
comТеперь можно поставить лезвия в пазы, зафиксировать их и приступать к заточке Главное – не доводить ножи до такого стояния, когда править их уже будет невозможно. А для этого – тщательно осматривайте доски перед работой и удаляйте все гвозди. А вот еще один вариант наточки лезвий, теперь на станке :
Главное – не доводить ножи до такого стояния, когда править их уже будет невозможно. А для этого – тщательно осматривайте доски перед работой и удаляйте все гвозди. А вот еще один вариант наточки лезвий, теперь на станке : Вам придется перетачивать их в ближайшее время. По этим причинам люди, занимающиеся строганием профессионально, выбирают только автоматическую или механическую заточку.
Вам придется перетачивать их в ближайшее время. По этим причинам люди, занимающиеся строганием профессионально, выбирают только автоматическую или механическую заточку.
 Приспособление идет в комплекте с T7.
Приспособление идет в комплекте с T7. Затем на закрепленный упор устанавливается держатель с ножом. Регулировка осуществляется винтами упора, нужно опустить держатель до касания камнем. Винтами выставления угла выбираем требуемый его параметр в отношении камня. Выполняя вращение в ручном режиме, по рискам на окрашенном лезвии определяется необходимость регулировки угла наклона держателя. И если это потребуется, такую регулировку очень просто сделать.
Затем на закрепленный упор устанавливается держатель с ножом. Регулировка осуществляется винтами упора, нужно опустить держатель до касания камнем. Винтами выставления угла выбираем требуемый его параметр в отношении камня. Выполняя вращение в ручном режиме, по рискам на окрашенном лезвии определяется необходимость регулировки угла наклона держателя. И если это потребуется, такую регулировку очень просто сделать. Главную затыловку делаем под углом 40 градусов, а саму вершину ножа – около 20 градусов. Тем самым вы значительно продлите срок службы, а также нож будет обладать хорошей устойчивостью к ударам.
Главную затыловку делаем под углом 40 градусов, а саму вершину ножа – около 20 градусов. Тем самым вы значительно продлите срок службы, а также нож будет обладать хорошей устойчивостью к ударам. Вы можете зафиксировать снимаемое количество металла, для этих целей предназначены два бегунка со шкалой и делением 0,1 мм. Специалист, выполняющий заточку, сможет регулировать этот параметр достаточно точно. Не стоит забывать после каждой подачи выполнять надежную фиксацию специальными зажимами, препятствующими появлению колебаний во время заточки.
Вы можете зафиксировать снимаемое количество металла, для этих целей предназначены два бегунка со шкалой и делением 0,1 мм. Специалист, выполняющий заточку, сможет регулировать этот параметр достаточно точно. Не стоит забывать после каждой подачи выполнять надежную фиксацию специальными зажимами, препятствующими появлению колебаний во время заточки.

 Не забудьте продумать кнопки включения и выключения. На планшайбу нужно поставить кожух, срезав одну сторону, с которой и будет выполняться заточка. Также в нижней части столешницы потребуется сделать вырез под пылесос. Данный станок также подойдет для работы с другими режущими поверхностями.
Не забудьте продумать кнопки включения и выключения. На планшайбу нужно поставить кожух, срезав одну сторону, с которой и будет выполняться заточка. Также в нижней части столешницы потребуется сделать вырез под пылесос. Данный станок также подойдет для работы с другими режущими поверхностями.

 В течение многих лет я пытался разработать надежный способ получить действительно острые ножи, не снимая их с ножевого вала. Любой метод от руки не был достаточно точным. И тогда я придумал этот джиг. Он прост в изготовлении и может быть легко адаптирован к размерам вашей машины.
В течение многих лет я пытался разработать надежный способ получить действительно острые ножи, не снимая их с ножевого вала. Любой метод от руки не был достаточно точным. И тогда я придумал этот джиг. Он прост в изготовлении и может быть легко адаптирован к размерам вашей машины. Подгонка должна быть достаточно плотной, чтобы не было провисаний, но при этом легко сниматься.
Подгонка должна быть достаточно плотной, чтобы не было провисаний, но при этом легко сниматься. Опускайте разгрузочный стол до тех пор, пока деревянный брусок (представляющий точильный камень) не коснется ножа. Полоска копировальной бумаги должна проскальзывать под дерево в начале разгрузочного стола.
Опускайте разгрузочный стол до тех пор, пока деревянный брусок (представляющий точильный камень) не коснется ножа. Полоска копировальной бумаги должна проскальзывать под дерево в начале разгрузочного стола. Если вы будете двигать камень только справа налево, вы не получите заусенцев на плоской стороне ножа. Если вы пойдете слева направо и создадите крошечный заусенец, его легко удалить небольшим шлифовальным бруском.
Если вы будете двигать камень только справа налево, вы не получите заусенцев на плоской стороне ножа. Если вы пойдете слева направо и создадите крошечный заусенец, его легко удалить небольшим шлифовальным бруском. Отображаемое имя }}
Отображаемое имя }} Точилка для фуганков Veritas предназначена для восстановления лезвий, затупившихся в результате обычного использования, даже если они имеют незначительные зазубрины.
Точилка для фуганков Veritas предназначена для восстановления лезвий, затупившихся в результате обычного использования, даже если они имеют незначительные зазубрины.
 Уолтером. На основании Совместного соглашения об отклонении иска с предубеждением от 10 января 2023 г. настоящим приказываю отклонить иск с предубеждением. (4)
Уолтером. На основании Совместного соглашения об отклонении иска с предубеждением от 10 января 2023 г. настоящим приказываю отклонить иск с предубеждением. (4) , и любые другие даты, предусмотренные в календаре по этому вопросу, настоящим ОТМЕНЯЮТСЯ. Дело прекращено. Сделал ИС-6. (4)
, и любые другие даты, предусмотренные в календаре по этому вопросу, настоящим ОТМЕНЯЮТСЯ. Дело прекращено. Сделал ИС-6. (4) Уолтером. Суд рассмотрел Совместный отчет сторон по правилу 26(f) и пришел к выводу, что Конференция по расписанию не является необходимой. Слушание 16 мая 2022 г. вакантно и вычеркнуто из календаря. Будет издан приказ о планировании и ведении дел. В настоящее время любые неотбытые ответчики Министерства энергетики увольняются. Суд, рассмотрев Запрос сторон: Выбор процедуры АРС, Уведомление Сторон о программе АРС, управляемой судом, или отчет, представленный сторонами в соответствии с ФРС. Р. Гражданский. P. 26(f) и Civil L.R. 26-1, настоящим: ПРИКАЗЫ, на которые ссылается данное дело: ПРОЦЕДУРА ДОПОГ №. 3: (Частное посредничество). Процедура ADR должна быть завершена не позднее: 5 декабря 2022 г. Совместный отчет о результатах конференции по урегулированию должен быть представлен: 9 декабря, 2022. (iv)
Уолтером. Суд рассмотрел Совместный отчет сторон по правилу 26(f) и пришел к выводу, что Конференция по расписанию не является необходимой. Слушание 16 мая 2022 г. вакантно и вычеркнуто из календаря. Будет издан приказ о планировании и ведении дел. В настоящее время любые неотбытые ответчики Министерства энергетики увольняются. Суд, рассмотрев Запрос сторон: Выбор процедуры АРС, Уведомление Сторон о программе АРС, управляемой судом, или отчет, представленный сторонами в соответствии с ФРС. Р. Гражданский. P. 26(f) и Civil L.R. 26-1, настоящим: ПРИКАЗЫ, на которые ссылается данное дело: ПРОЦЕДУРА ДОПОГ №. 3: (Частное посредничество). Процедура ADR должна быть завершена не позднее: 5 декабря 2022 г. Совместный отчет о результатах конференции по урегулированию должен быть представлен: 9 декабря, 2022. (iv) .. (Рондо, Чарльз)
.. (Рондо, Чарльз) , в котором указывается итальянская корпорация Parotex Sri. (Гершуни, Грегори)
, в котором указывается итальянская корпорация Parotex Sri. (Гершуни, Грегори)
 02 13:53
02 13:53 Соответственно, Суд настоящим отклоняет иск в отношении ответчиков Доу с 11 по 25 включительно. С ЭТОЙ ЗАПИСЬЮ НЕТ ДОКУМЕНТА в формате PDF. (ср)
Соответственно, Суд настоящим отклоняет иск в отношении ответчиков Доу с 11 по 25 включительно. С ЭТОЙ ЗАПИСЬЮ НЕТ ДОКУМЕНТА в формате PDF. (ср) (Адвокат Чарльз Р. Рондо добавлен к стороне MPK, Inc.(pty:pla))(Рондо, Чарльз)
(Адвокат Чарльз Р. Рондо добавлен к стороне MPK, Inc.(pty:pla))(Рондо, Чарльз) Бартелеми Св. ЕленаСв. Китс и НевисСент. Люсия Св. МартинСт. Пьер и МикелонСв. Винсент и ГренадиныСуданСуринамШпицберген и Ян-МайенШвецияШвейцарияТайваньТаджикистанТанзанияТаиландТимор-ЛештиТогоТокелауТонгаТринидад и ТобагоТристан-да-КуньяТунисТурцияТуркменистанОстрова Теркс и КайкосТувалуСША. Отдаленные островаУгандаУкраинаОбъединенные Арабские ЭмиратыВеликобританияСоединенные ШтатыУругвайУзбекистанВануатуВатиканВенесуэлаВьетнамУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабве
Бартелеми Св. ЕленаСв. Китс и НевисСент. Люсия Св. МартинСт. Пьер и МикелонСв. Винсент и ГренадиныСуданСуринамШпицберген и Ян-МайенШвецияШвейцарияТайваньТаджикистанТанзанияТаиландТимор-ЛештиТогоТокелауТонгаТринидад и ТобагоТристан-да-КуньяТунисТурцияТуркменистанОстрова Теркс и КайкосТувалуСША. Отдаленные островаУгандаУкраинаОбъединенные Арабские ЭмиратыВеликобританияСоединенные ШтатыУругвайУзбекистанВануатуВатиканВенесуэлаВьетнамУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабве Товары, отправленные обратно к нам без предварительного запроса на возврат, не будут приняты.
Товары, отправленные обратно к нам без предварительного запроса на возврат, не будут приняты.
 Настоящая Ограниченная гарантия распространяется на любые дефекты материалов или изготовления при нормальном использовании в течение гарантийного срока.
Настоящая Ограниченная гарантия распространяется на любые дефекты материалов или изготовления при нормальном использовании в течение гарантийного срока.

 Рекомендуемая мощность при гравировке таких материалов составляет 60-80% от номинала (для натуральной древесины этот параметр можно поднять до 100%). Скорость перемещения лазерной головки при этом может быть близка к максимальной. При работе с менее плотными поверхностями, например, бумагой, картоном или фетровой тканью, мощность следует уменьшить до 10-50% (подбирать экспериментальным путем), чтобы избежать прогорания краев.
Рекомендуемая мощность при гравировке таких материалов составляет 60-80% от номинала (для натуральной древесины этот параметр можно поднять до 100%). Скорость перемещения лазерной головки при этом может быть близка к максимальной. При работе с менее плотными поверхностями, например, бумагой, картоном или фетровой тканью, мощность следует уменьшить до 10-50% (подбирать экспериментальным путем), чтобы избежать прогорания краев. Двухдюймовая линза позволяет получить хорошие, четкие изображения со средним требованием к детализации и минимальным количеством сложноконтурных или мелких участков. Линза 2,5 дюйма ставится в тех случаях, когда разрешение исходного изображения низкое и требования к детализации минимальные.
Двухдюймовая линза позволяет получить хорошие, четкие изображения со средним требованием к детализации и минимальным количеством сложноконтурных или мелких участков. Линза 2,5 дюйма ставится в тех случаях, когда разрешение исходного изображения низкое и требования к детализации минимальные. Что касается качества материала, то, в первую очередь, этот акцент касается фанеры, для которой очень важна сортность. Чем ниже сорт, тем больше в ней сучков, затрудняющих прохождения луча вглубь и нарушающих целостность восприятия гравировки, поэтому для гравировки рекомендуется использовать только фанеру высшего класса.
Что касается качества материала, то, в первую очередь, этот акцент касается фанеры, для которой очень важна сортность. Чем ниже сорт, тем больше в ней сучков, затрудняющих прохождения луча вглубь и нарушающих целостность восприятия гравировки, поэтому для гравировки рекомендуется использовать только фанеру высшего класса.
 Без предварительной обработки такого материала нет смысла даже пытаться запускать станок (следует уточнить, что речь идет о CO2 граверах, а не об оптоволоконных лазерах, которые как раз и предназначены для работы с металлами). Для того, чтобы луч лазера не отражался от поверхности, ее необходимо покрыть специальным спреем или пастой, которую наносят кисточкой. Следует учитывать, что качество гравировки во многом зависит от толщины и равномерности слоя нанесенной эмульсии, поэтому нужно стараться покрыть металл очень тонким слоем, избегая при этом наплывов. Сама паста имеет довольно вязкую, густую консистенцию и может расслаиваться, поэтому перед использованием необходимо тщательно перемешать ее до полной однородности (допускается разбавление небольшим количеством спирта). После высыхания присадки можно приступать к гравировке. Общей рекомендацией для всех металлов является обработка на высокой скорости, но малой мощности (максимум 40 Вт).
Без предварительной обработки такого материала нет смысла даже пытаться запускать станок (следует уточнить, что речь идет о CO2 граверах, а не об оптоволоконных лазерах, которые как раз и предназначены для работы с металлами). Для того, чтобы луч лазера не отражался от поверхности, ее необходимо покрыть специальным спреем или пастой, которую наносят кисточкой. Следует учитывать, что качество гравировки во многом зависит от толщины и равномерности слоя нанесенной эмульсии, поэтому нужно стараться покрыть металл очень тонким слоем, избегая при этом наплывов. Сама паста имеет довольно вязкую, густую консистенцию и может расслаиваться, поэтому перед использованием необходимо тщательно перемешать ее до полной однородности (допускается разбавление небольшим количеством спирта). После высыхания присадки можно приступать к гравировке. Общей рекомендацией для всех металлов является обработка на высокой скорости, но малой мощности (максимум 40 Вт).

 Но все больше пользователей интересуется, как гравировать на лазерном станке. В ходе работы регулируется длина лазерного луча, благодаря чему можно выполнять рисунки в формате 3D или 4D.
Но все больше пользователей интересуется, как гравировать на лазерном станке. В ходе работы регулируется длина лазерного луча, благодаря чему можно выполнять рисунки в формате 3D или 4D./b157e7202c3cd7b.ru.s.siteapi.org/img/b31cef73b77d962caa6ed6e4941513f7fedbacc7.jpg)
 Как правило, для лазерной гравировки мастера выбирают лазерную трубку мощностью 40 Вт. В зависимости от прочности обрабатываемого материала мощность может использоваться не полностью. Например, чтобы избежать обгорания заготовки из бумаги, картона или фетровой ткани, используется только 10 — 50% мощности лазерной трубки.
Как правило, для лазерной гравировки мастера выбирают лазерную трубку мощностью 40 Вт. В зависимости от прочности обрабатываемого материала мощность может использоваться не полностью. Например, чтобы избежать обгорания заготовки из бумаги, картона или фетровой ткани, используется только 10 — 50% мощности лазерной трубки. Во время работы станка на этих деталях может оседать пыль и нагар, которые пагубно влияют на качество реза. При очистке деталей следите, чтобы на них не оставались отпечатки пальцев.
Во время работы станка на этих деталях может оседать пыль и нагар, которые пагубно влияют на качество реза. При очистке деталей следите, чтобы на них не оставались отпечатки пальцев.


 Определения и примеры »
Определения и примеры »


 де Пюйморен в Тулузе.
де Пюйморен в Тулузе.